
Teager–Kaiser Energy Operator-Based Short-Circuit Fault Localization Method for Multi-Circuit Parallel Cables


Abstract
1. Introduction
2. Model of Multi-Circuit Parallel Cables and Fault Localization Method
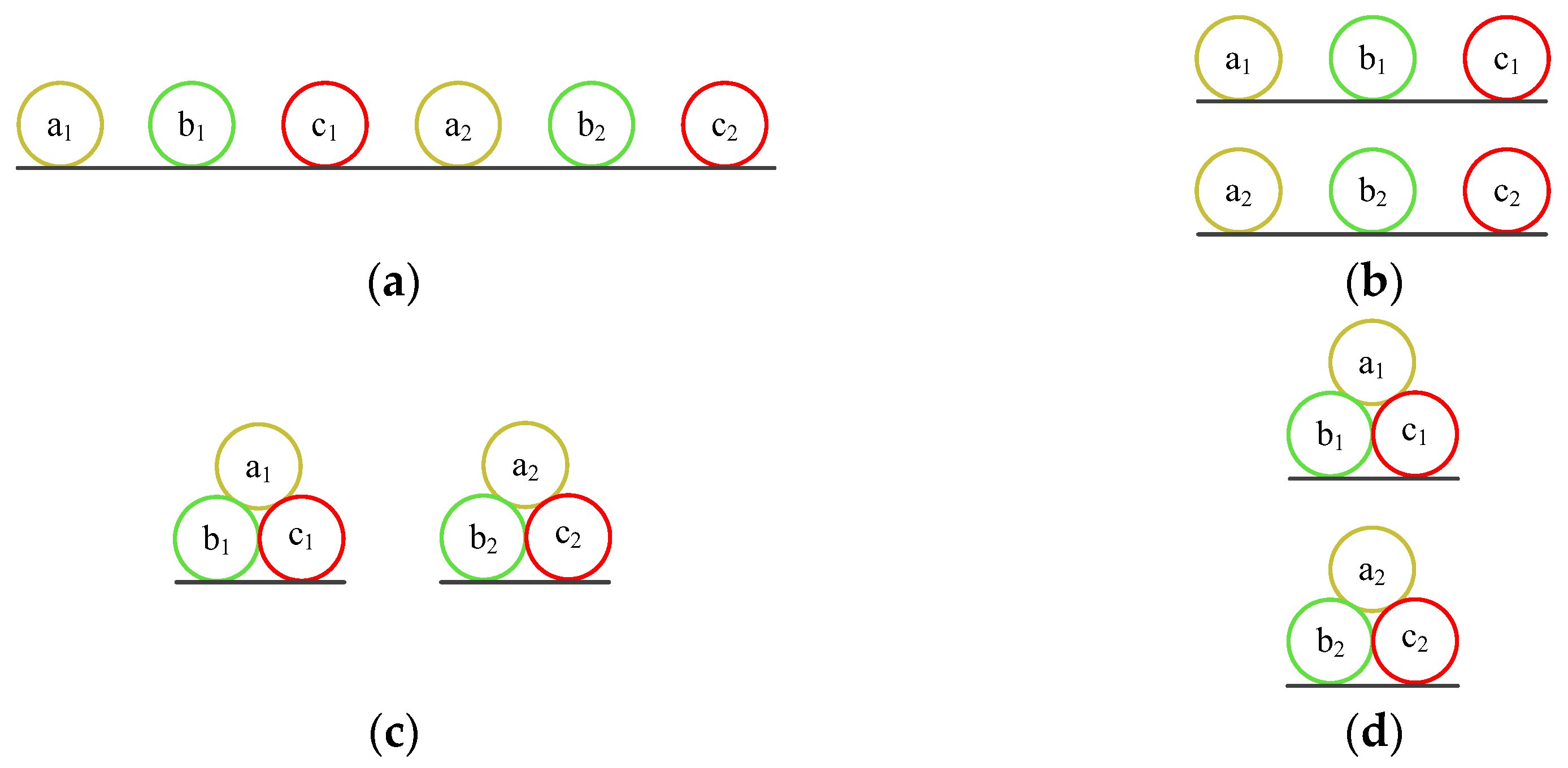
2.1. Multi-Circuit Cable Installation Methods and Asymmetry Analysis
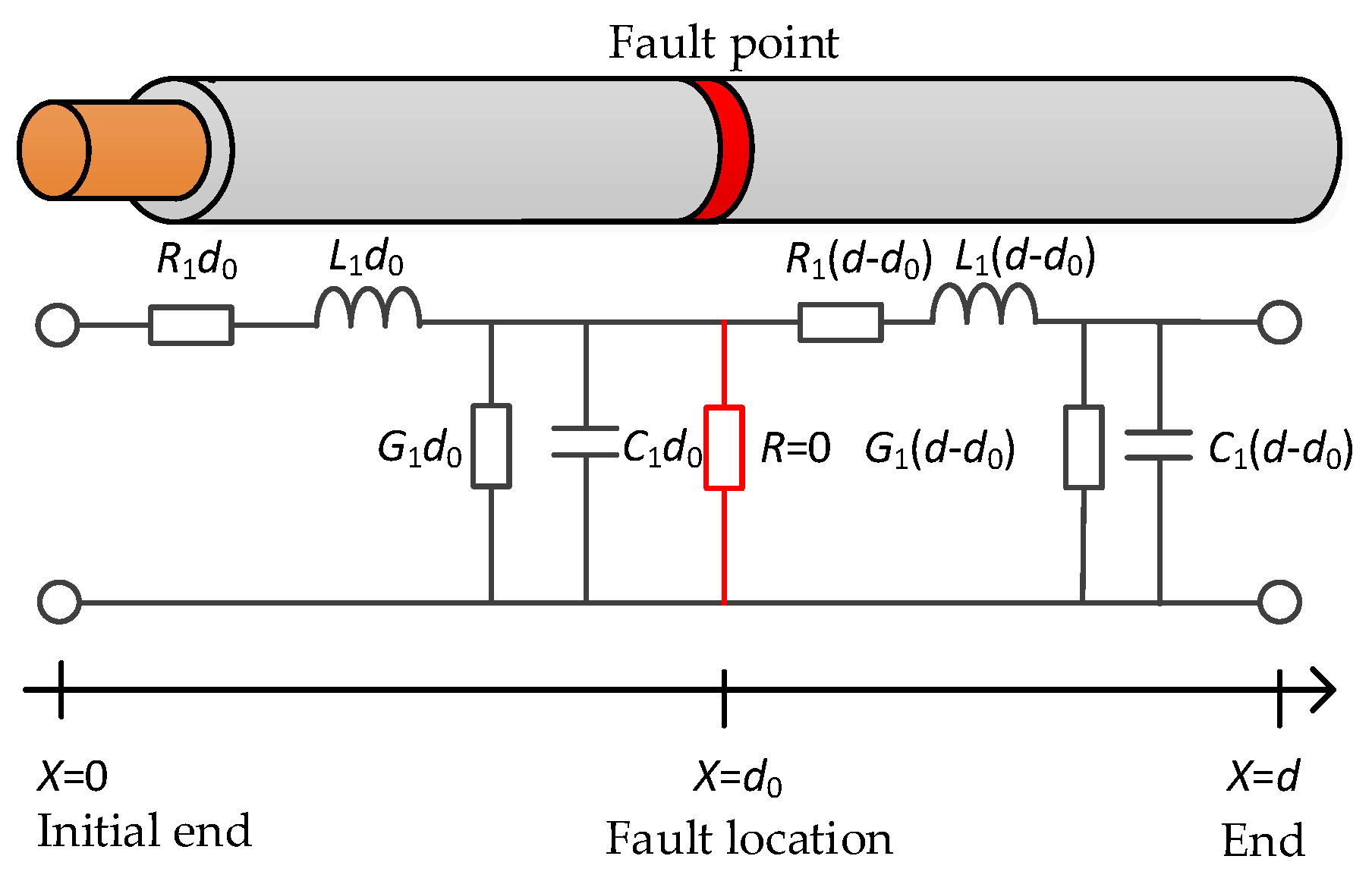
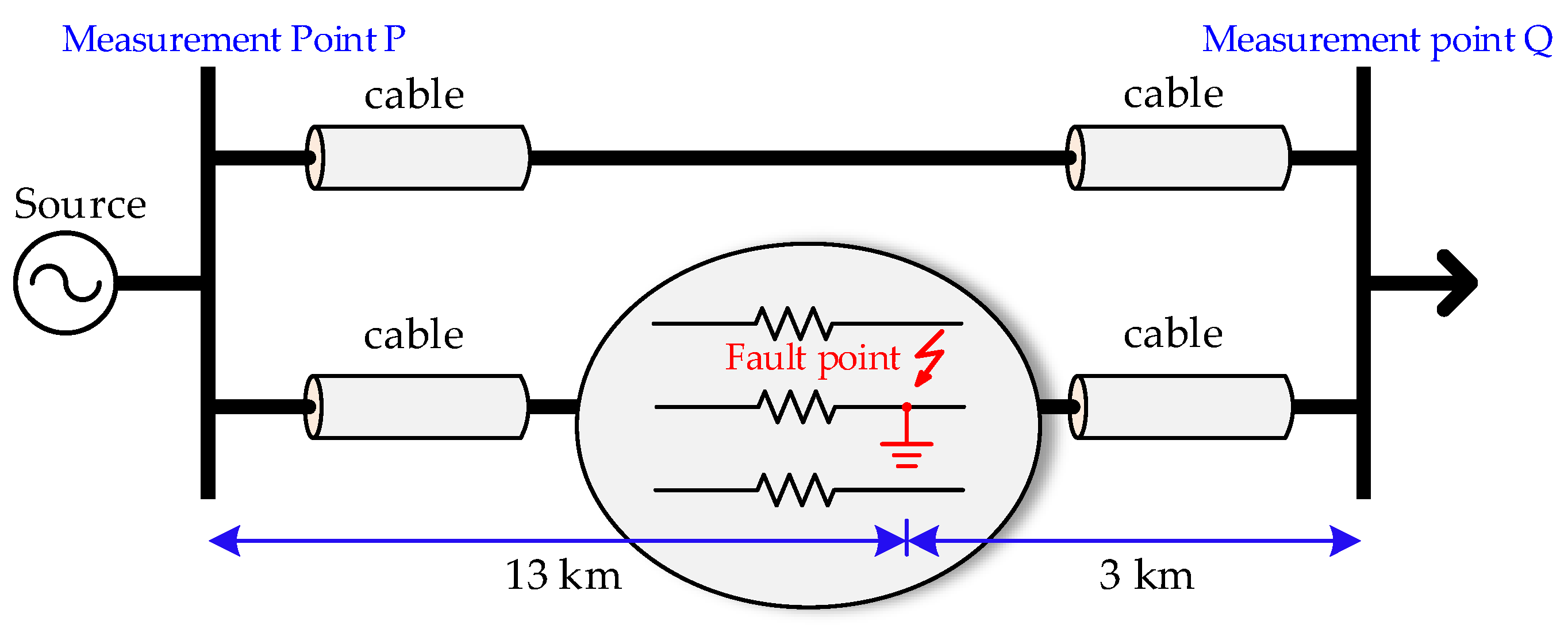
2.2. Short-Circuit Fault Model of Cable
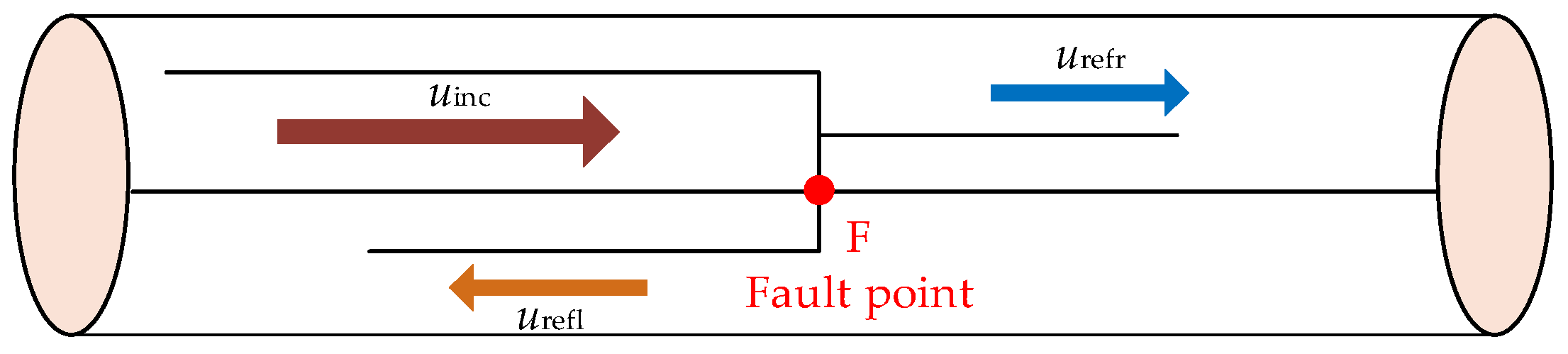
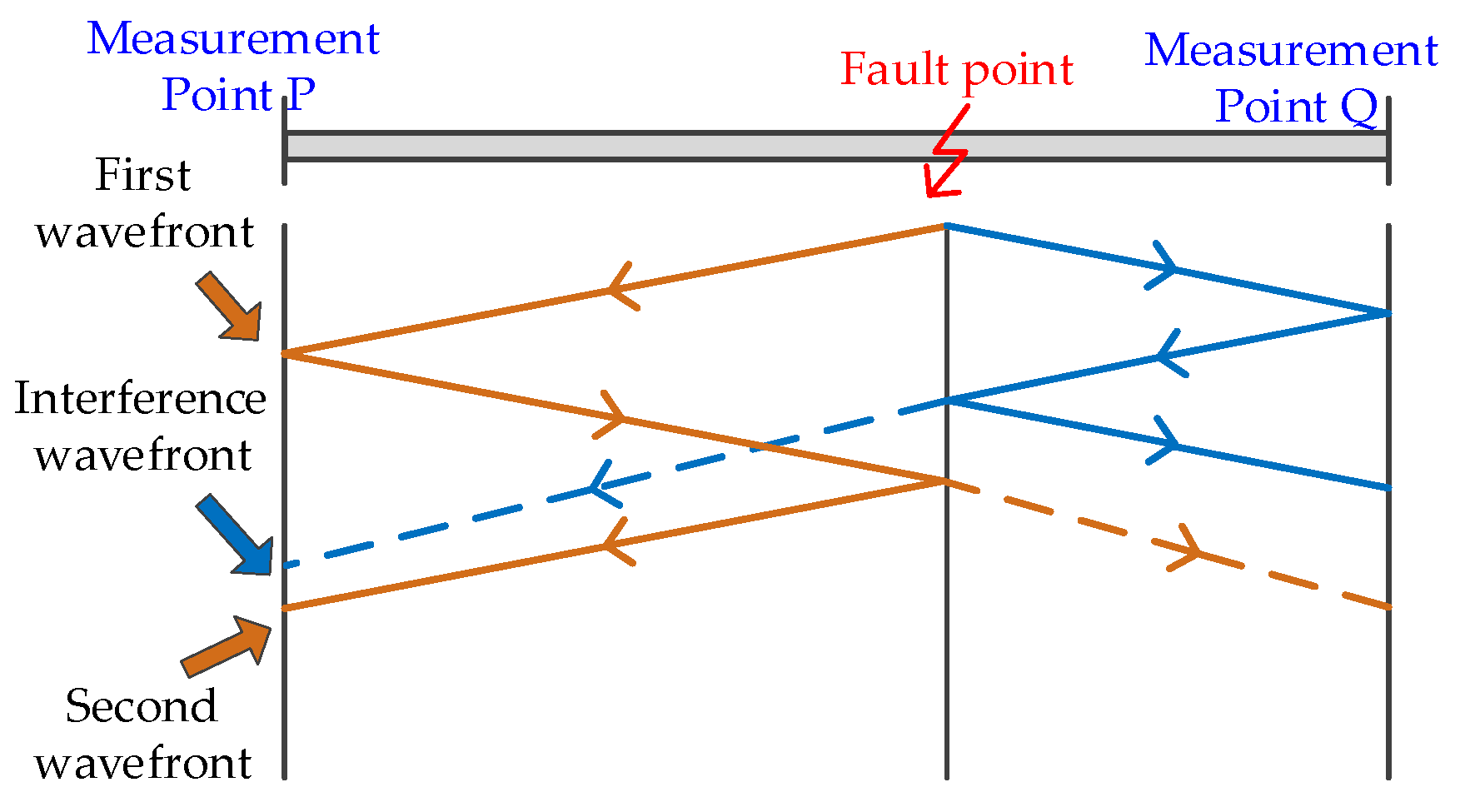
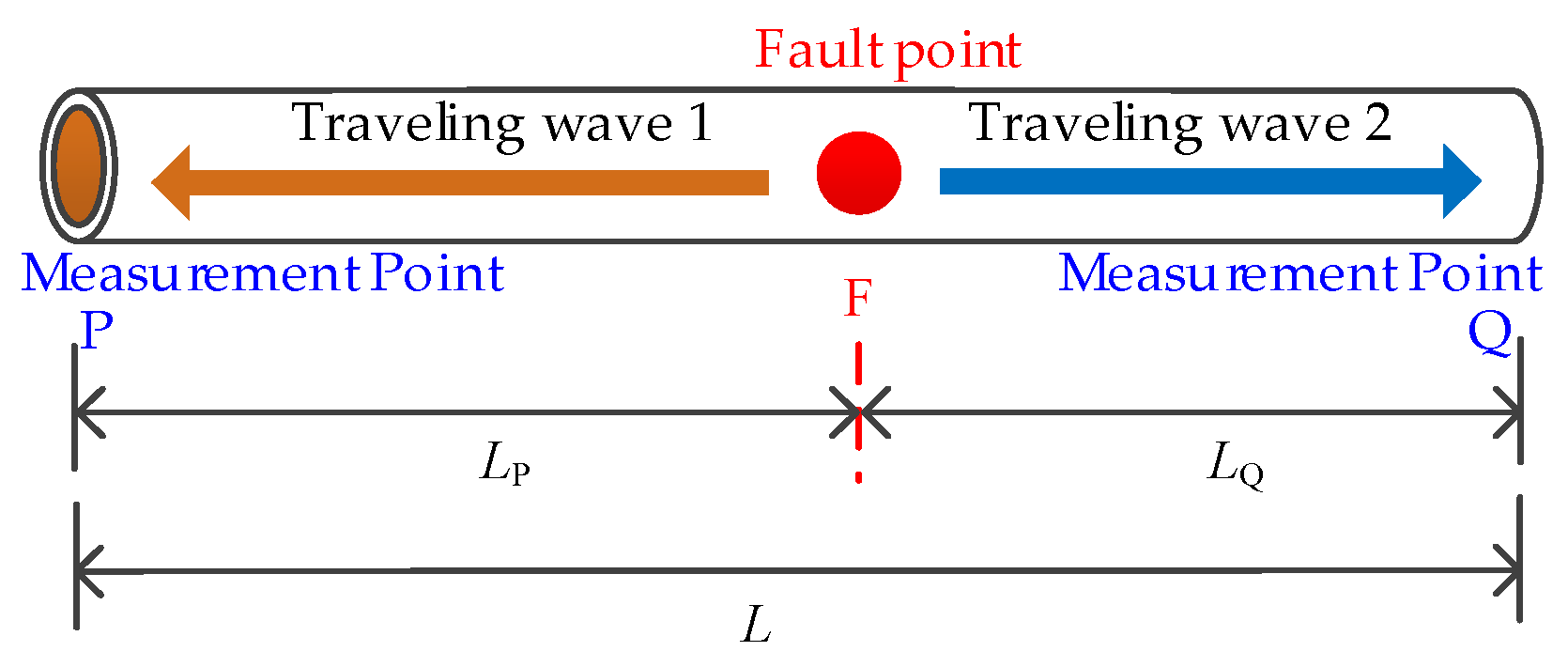
2.3. Fault Localization Method in Multi-Circuit Parallel Cables
3. Improved Short-Circuit Fault Localization Method
3.1. Conventional Wavelet Transform Method
3.2. Teager–Kaiser Energy Operator
3.3. Short-Circuit Fault Localization Method Based on TKEO
4. Accuracy Verification
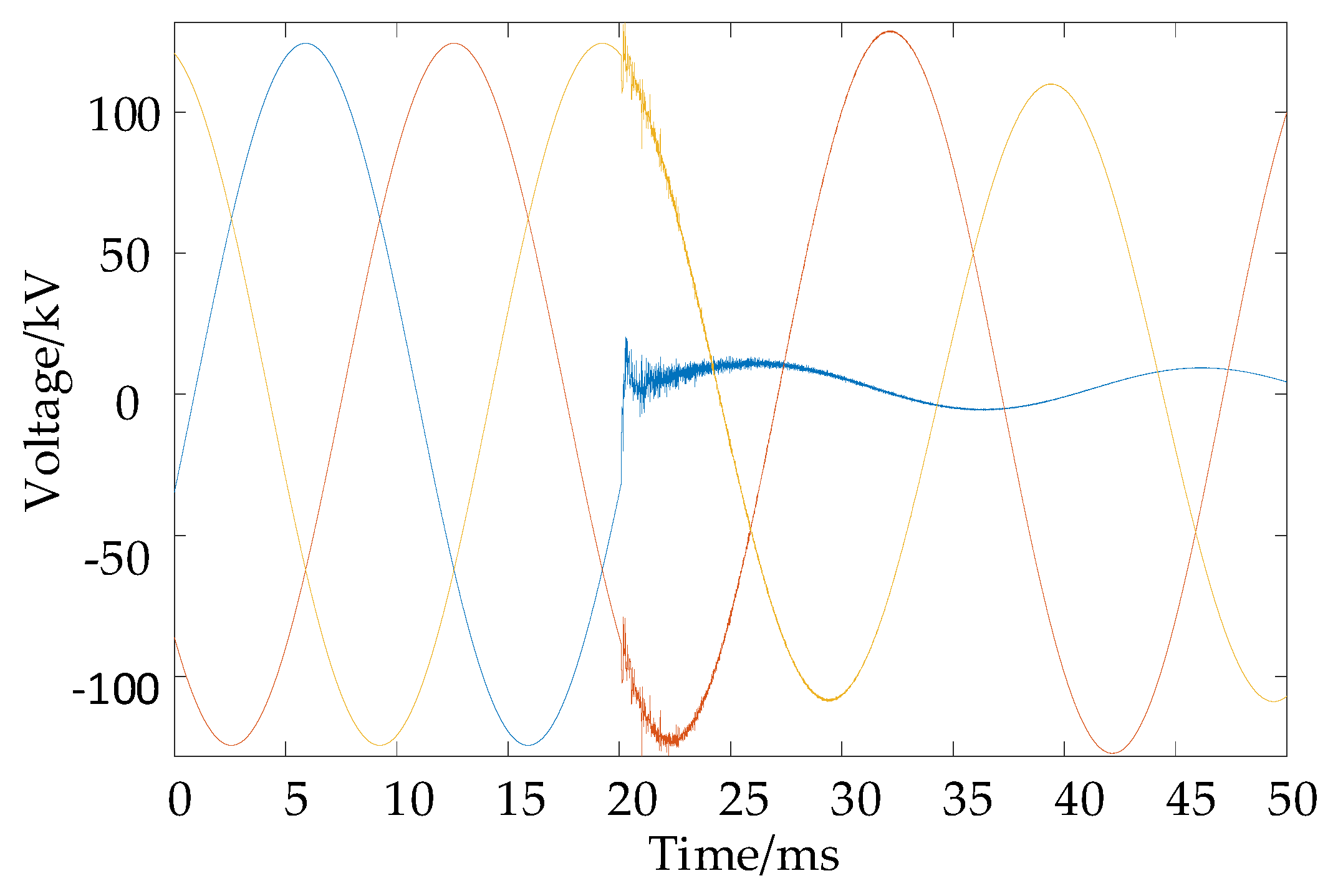
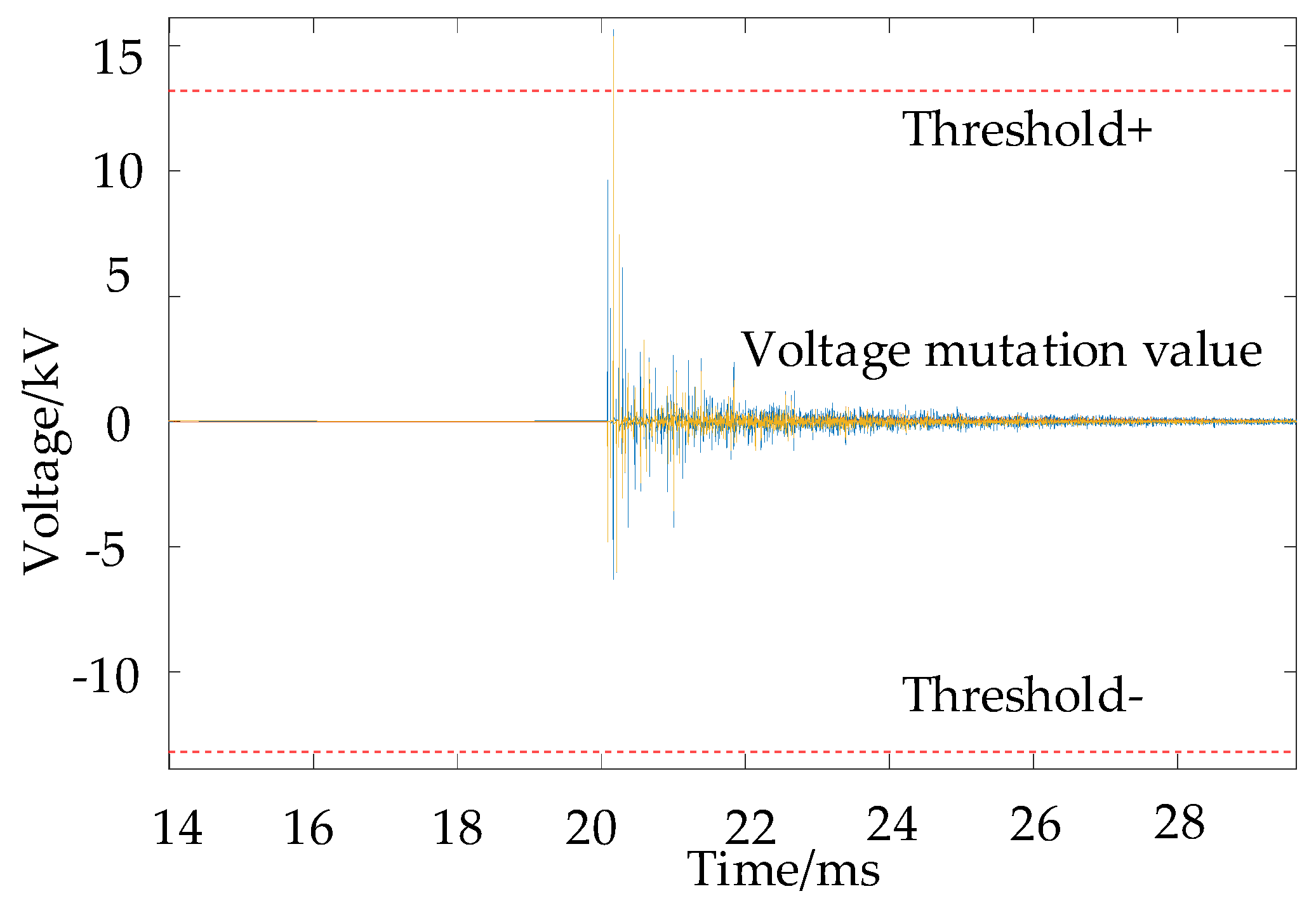
4.1. Single-Phase Grounding Fault Localization Case
4.2. Two-Phase Grounding Fault Localization Case
4.3. Two-Phase Short-Circuit Fault Localization Case
4.4. Three-Phase Short-Circuit Fault Localization Case
5. Conclusions
- (1)
- In multi-circuit parallel cable faults, fault signals are severely contaminated by noise, substantially complicating feature extraction. The proposed TKEO-based method effectively captures the transient energy characteristics of fault signals, enabling robust detection even under high-noise conditions.
- (2)
- The developed TKEO-based localization method achieves exceptional accuracy, with relative errors consistently maintained within 0.1%. Compared to conventional methods, the optimization degree of fault localization is enhanced by at least 67%, demonstrating superior performance in both simulation and experimental validations.
- (3)
- Signal coupling and traveling wavefront interference in multi-circuit systems critically degrade sampling precision. By integrating Clarke’s transformation for modal decoupling and the TKEO for energy thresholding, the method successfully isolates fault-induced components while suppressing electromagnetic interference, thereby improving localization reliability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, H. Cable Fault Detection and Diagnosis Method Based on Convolutional Neural Network. In Proceedings of theIEEE International Conference on Image Processing and Computer Applications (ICIPCA), Changchun, China, 11–13 August 2023; pp. 1463–1466. [Google Scholar]
- Kim, H.; Jeong, H.; Lee, H.; Kim, S.W. Online and Offline Diagnosis of Motor Power Cables Based on 1D CNN and Periodic Burst Signal Injection. Sensors 2021, 21, 5936. [Google Scholar] [CrossRef] [PubMed]
- Furse, C.M.; Kafal, M.; Razzaghi, R.; Shin, Y.-J. Fault Diagnosis for Electrical Systems and Power Networks: A Review. IEEE Sens. J. 2020, 21, 888–906. [Google Scholar] [CrossRef]
- Panahi, H.; Zamani, R.; Sanaye-Pasand, M.; Mehrjerdi, H. Advances in Transmission Network Fault Location in Modern Power Systems: Review, Outlook and Future Works. IEEE Access 2021, 9, 158599–158615. [Google Scholar] [CrossRef]
- Gao, H.; Haidi, A.; Li, J. A Fault Diagnosis Method Based on Time Domain Reflectometry for Power Cable. IEEE Trans. Dielectr. Electr. Insul. 2024, 27, 10665355. [Google Scholar]
- Zhang, Y.; Li, H.; Wang, X. Research on Fault Diagnosis Method of Aviation Cable Based on Improved Adaboost. J. Aerosp. Eng. 2023, 36, 123456. [Google Scholar]
- Li, H.; Zhang, Y.; Wang, X. A High-Impedance Fault Detection Method for Active Distribution Networks Based on Time-Frequency-Space Domain Fusion Features and Hybrid Convolutional Neural Network. IEEE Trans. Power Syst. 2024, 39, 2345–2356. [Google Scholar]
- Zhang, X.; Zhang, B.; Guo, B.; Ren, H.; Wang, W.; Ma, C. Research and Application of Fault Diagnosis and Localization Techniques for Power Communication Optical Cables Based on Multimodal Data Analysis. In Proceedings of the 2024 IEEE 4th International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 22–24 November 2024; pp. 158–162. [Google Scholar]
- Liu, C.; Hou, Y.; Duan, Z.; Shang, R.; Wang, K.; Chen, D. Underground Power Cable Fault Detection and Localization Based on the Spectrum of Propagation Functions. IEEE Trans. Instrum. Meas. 2024, 73, 3530211. [Google Scholar] [CrossRef]
- Hu, S.; Wang, L.; Mao, J.; Gao, C.; Zhang, B.; Yang, S. Synchronous Online Diagnosis of Multiple Cable Intermittent Faults Based on Chaotic Spread Spectrum Sequence. IEEE Trans. Ind. Electron. 2019, 66, 3217–3226. [Google Scholar] [CrossRef]
- Wang, S.; Liu, J.; Li, Z.; Zhang, H.; Zhang, L.; Liu, H. Diagnosis and Location of Defects in a Cross-Bonding Cable System Based on Multi-Phase High-Voltage High-Frequency Collaborative Excitation. IEEE Trans. Ind. Electron. 2024, 71, 14946–14956. [Google Scholar] [CrossRef]
- Gao, C.; Wang, L.; Mao, J.; Hu, S.; Zhang, B.; Yang, S. Non-Intrusive Cable Fault Diagnosis Based on Inductive Directional Coupling. IEEE Trans. Power Deliv. 2019, 34, 1684–1694. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, D.; Liu, B.; Hu, Y.; Zhou, L. Fault Diagnosis for Shielded Cable in EMUs Based on TLS-ESPRIT and 3D-BIS Images. IEEE Trans. Transp. Electrif. 2024, 11, 2230–2242. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, K.; Zhao, Q.; Xu, Y.; Meng, P.; Yuan, H.; Fu, Y.; Lin, S. Diagnosis and Localization of Moisture Defects in HV Cable Water-Blocking Buffer Layer Based on Characteristic Impedance Variation. IEEE Trans. Dielectr. Electr. Insul. 2024, 31, 3322–3330. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, D.; Hu, Y.; Liu, B.; Zhou, L.; Qian, G.; Li, Z. Fault Diagnosis for Shielded Cables Based on MSST Algorithm and Impedance Polar Plots. IEEE Trans. Instrum. Meas. 2024, 73, 1–12. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, Q.; Shu, Y.; Xiao, W.; Ma, W. Remaining Useful Life Prediction for Rolling Bearings With a Novel Entropy-Based Health Indicator and Improved Particle Filter Algorithm. IEEE Access 2023, 11, 3062–3079. [Google Scholar] [CrossRef]
- Sian, H.; Kuo, C.; Der Lu, S.; Wang, M. A Novel Fault Diagnosis Method of Power Cable Based on Convolutional Probabilistic Neural Network with Discrete Wavelet Transform and Symmetrized Dot Pattern. IET Sci. Meas. Technol. 2022, 17, 58–70. [Google Scholar] [CrossRef]
- Wolfson, E.J.; Fekete, T.; Loewenstein, Y.; Shriki, O. Multi-scale entropy assessment of magnetoencephalography signals in schizophrenia. Sci. Rep. 2024, 14, 14680. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; He, J.; Yi, J.; Tao, J.; Zhang, C.Y.; Zhang, X. Multi-Scale Permutation Entropy for Audio Deepfake Detection. In Proceedings of the ICASSP 2024—2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Republic of Korea, 14–19 April 2024; pp. 1406–1410. [Google Scholar]
- Hu, M.; Liang, H. Perceptual Suppression Revealed by Adaptive Multi-scale Entropy Analysis of Local Field Potential in Monkey Visual Cortex. Int. J. Neural Syst. 2013, 23, 1350005. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cable Parameters | Value | Unit |
|---|---|---|
| Positive Sequence Resistance | 0.0127 | Ω/km |
| Zero Sequence Resistance | 0.3864 | Ω/km |
| Positive Sequence Inductance | 0.2230 | mH/km |
| Zero Sequence Inductance | 0.8911 | mH/km |
| Positive Sequence Capacitance | 190.680 | nF/km |
| Zero Sequence Capacitance | 190.660 | nF/km |
| Actual Fault Distance/km | Ranging Method | Localization Results/km | Relative Error/% |
|---|---|---|---|
| 10 | Without Using TKEO | 10.1086 | 1.0860 |
| Using TKEO | 10.0319 | 0.3190 | |
| 11 | Without Using TKEO | 10.9137 | −0.7845 |
| Using TKEO | 10.9904 | −0.0873 | |
| 12 | Without Using TKEO | 12.1022 | 0.8517 |
| Using TKEO | 12.0639 | 0.5325 | |
| 13 | Without Using TKEO | 13.0607 | 0.4669 |
| Using TKEO | 13.0223 | 0.1858 |
| Actual Fault Distance/km | Ranging Method | Localization Results/km | Relative Error/% |
|---|---|---|---|
| 14 | Without Using TKEO | 14.1086 | 0.7757 |
| Using TKEO | 14.0319 | 0.2279 | |
| 16 | Without Using TKEO | 16.1022 | 0.6388 |
| Using TKEO | 16.0255 | 0.1594 | |
| 18 | Without Using TKEO | 18.0958 | 0.5322 |
| Using TKEO | 18.0191 | 0.1061 | |
| 20 | Without Using TKEO | 20.0894 | 0.4470 |
| Using TKEO | 20.0511 | 0.2555 |
| Actual Fault Distance/km | Ranging Method | Localization Results/km | Relative Error/% |
|---|---|---|---|
| 14 | Without Using TKEO | 14.0703 | 0.5021 |
| Using TKEO | 14.0319 | 0.2279 | |
| 16 | Without Using TKEO | 16.0639 | 0.3994 |
| Using TKEO | 16.0255 | 0.1594 | |
| 18 | Without Using TKEO | 18.0958 | 0.5322 |
| Using TKEO | 18.0575 | 0.3194 | |
| 20 | Without Using TKEO | 20.0894 | 0.4470 |
| Using TKEO | 20.0511 | 0.2555 |
| Actual Fault Distance/km | Ranging Method | Localization Results/km | Relative Error/% |
|---|---|---|---|
| 15 | Without Using TKEO | 15.0383 | 0.2553 |
| Using TKEO | 15 | 0.0000 | |
| 17 | Without Using TKEO | 17.0319 | 0.1876 |
| Using TKEO | 16.9936 | −0.0376 | |
| 19 | Without Using TKEO | 19.1022 | 0.5379 |
| Using TKEO | 19.0639 | 0.3363 | |
| 21 | Without Using TKEO | 21.0958 | 0.4562 |
| Using TKEO | 21.0575 | 0.2738 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Mao, J.; Luo, C.; Sun, Y.; Zheng, C.; Chen, Z. Teager–Kaiser Energy Operator-Based Short-Circuit Fault Localization Method for Multi-Circuit Parallel Cables. Energies 2025, 18, 2432. https://doi.org/10.3390/en18102432
Li Z, Mao J, Luo C, Sun Y, Zheng C, Chen Z. Teager–Kaiser Energy Operator-Based Short-Circuit Fault Localization Method for Multi-Circuit Parallel Cables. Energies. 2025; 18(10):2432. https://doi.org/10.3390/en18102432
Chicago/Turabian StyleLi, Zhichao, Jian Mao, Changhao Luo, Yuangang Sun, Chuanjian Zheng, and Zhenfei Chen. 2025. "Teager–Kaiser Energy Operator-Based Short-Circuit Fault Localization Method for Multi-Circuit Parallel Cables" Energies 18, no. 10: 2432. https://doi.org/10.3390/en18102432
APA StyleLi, Z., Mao, J., Luo, C., Sun, Y., Zheng, C., & Chen, Z. (2025). Teager–Kaiser Energy Operator-Based Short-Circuit Fault Localization Method for Multi-Circuit Parallel Cables. Energies, 18(10), 2432. https://doi.org/10.3390/en18102432