1. Introduction
In a dual-inertia system based on a permanent magnet synchronous motor (PMSM), the elastic transmission mechanism, such as the reducer and coupling, is prone to mechanical resonance, which reduces the precision of servo system transmission. Model prediction and introduction of state feedback are effective methods to suppress mechanical resonance, but the control parameters depend on the mechanical parameters of the system. In the design of servo drive system controllers, in order to achieve a better response process or higher positioning accuracy, the controller parameter tuning usually needs to be substituted for mechanical parameter values. For example, in the design of a speed loop controller, the accurate rotational inertia is necessary. Chang, H. et al. point out that mismatched parameters will lead to slow dynamic response or poor steady-state performance of the system [
1]. Manufacturer’s production differences or variations in operating conditions may cause changes in the mechanical parameters of the system, resulting in a decline in control performance. So, it is crucial to identify the mechanical parameters of this study.
Parameters in a servo drive system include internal electrical parameters (resistance, inductance, magnetic chain, etc.) and external mechanical parameters (rotational inertia, friction damping, drive shaft stiffness, etc.), where the internal parameters are used for the design of a current loop controller. And the external parameters are used for the design of a speed loop controller. The main difference between a single-inertia and a multi-inertia system parameter identification is the difference in external mechanical parameters. And the multi-inertia system adds the mechanical parameters of the transmission mechanism in addition to the parameters of the drive motor and load. Thenozhi, S. et al. concluded that the identification algorithms of each parameter in a single-inertia system have been more mature, including acceleration and deceleration methods, least squares, and improvement algorithms [
2]; Song, Z. et al. point out that model reference adaptive method have been more mature [
3]; Lian, C. et al. point out that observer-based methods have been more mature [
4]; Zhang mentioned the extended Kalman filtering method as the identification algorithm [
5], etc. Currently, this function is available in servo drives such as the Mitsubishi MR-JE-40A and Panasonic A6 [
6] in Japan. The multi-inertia system parameter identification is represented by double inertia; due to the mechanical structure of the introduction of more parameters, complex working conditions and other issues appear more difficult. However, since the technology has not yet matured, the application of the method is not as rich as the single-inertia system. For the dual-inertia servo system, it is quite challenging to construct the full-rank identification equation due to the excessive mechanical parameters, so the mechanical parameter identification technology is relatively immature [
7]. At present, there are mainly two types of methods: parametric and non-parametric methods.
The parametric method recognizes the system parameters by assuming a system model such that the difference between its output and the actual output of the system satisfies a set performance index function. With the development of digitalization, the assumed system model has been transformed from a continuous data discrimination model to a discrete data discrimination model. Seppo E. Sarika’s team at Aalto University, Finland used a discrete-time polynomial model with an Output Error (OE) structure in 2012 and a random binary sequence as the excitation signal. The comparisons of the identification accuracy under different test methods, such as open loop, indirect closed loop, and direct closed loop, pointed out that the identification results deviated greatly in the case of a closed loop at speed due to the influence of the controller [
8]. In order to overcome the difficulties of closed-loop identification, the team proposed an improved indirect method in 2013, which used a pseudo-random binary sequence (PRBS) as the excitation signal for six external mechanical parameters (drive motor inertia and friction coefficient, load motor inertia and friction coefficient, driveshaft stiffness and friction coefficient), and a random binary sequence (PRBS) as the excitation signal, combined with the least squares method, to find out the parameters in the discrete domain, and then transformed to the frequency domain through the zero-pole matching method to obtain the identification results. However, due to its cumbersome arithmetic process, it needs to be combined with dSPACE, which limits its application in industry [
9]. Luczak, D. et al. considered the different identification settings and gave simulation and experimental results for two different mechanism signals, PRBS and Chirp, under ARX and OE identification models, respectively [
10].
The non-parametric method achieves identification based on the system response curve, such as impulse response and frequency response characteristics. Ref. [
11] superimposed the PRBS on the stator current component
iq for the excitation of an encoder-less system. The motor speed is obtained using an extended speed adaptive observer, signal processing is performed, frequency response is calculated, baud plots are plotted, and resonance frequencies are obtained by Welch’s method. Zhou [
12] mentioned a method for identification, employing an iterative process based on the linearized and weighted total least squares approach. This methodology enables the derivation of a transfer function without any prerequisite knowledge concerning resonance characteristics or time delay. However, Calvini, M. et al. mentioned that the non-parametric identification method cannot be used for systems with serious nonlinear features, because the nonlinear features will greatly change the system frequency response, resulting in poor identification accuracy [
13].
Inspired by the references, this article first establishes a mathematical model of a dual-inertia servo system and then uses recursive least squares with forgetting factors to construct a discrete identification function, achieving online identification of the main mechanical parameters. At the same time, the factors affecting identification accuracy are analyzed, and finally, the effectiveness of the identification algorithm is demonstrated through simulation and experiments. This article solves the parameter identification problem of multi-inertia systems based on dual inertia. Based on the identified stiffness and inertia values, it can provide support for more complex nonlinear factors such as gap analysis, reduce sensor costs, and improve the dynamic response capability and position control accuracy in precision manufacturing, especially in micromachining processes. The technology proposed in this article provides technical support.
2. Mathematical Modelling of Dual-Inertia Systems
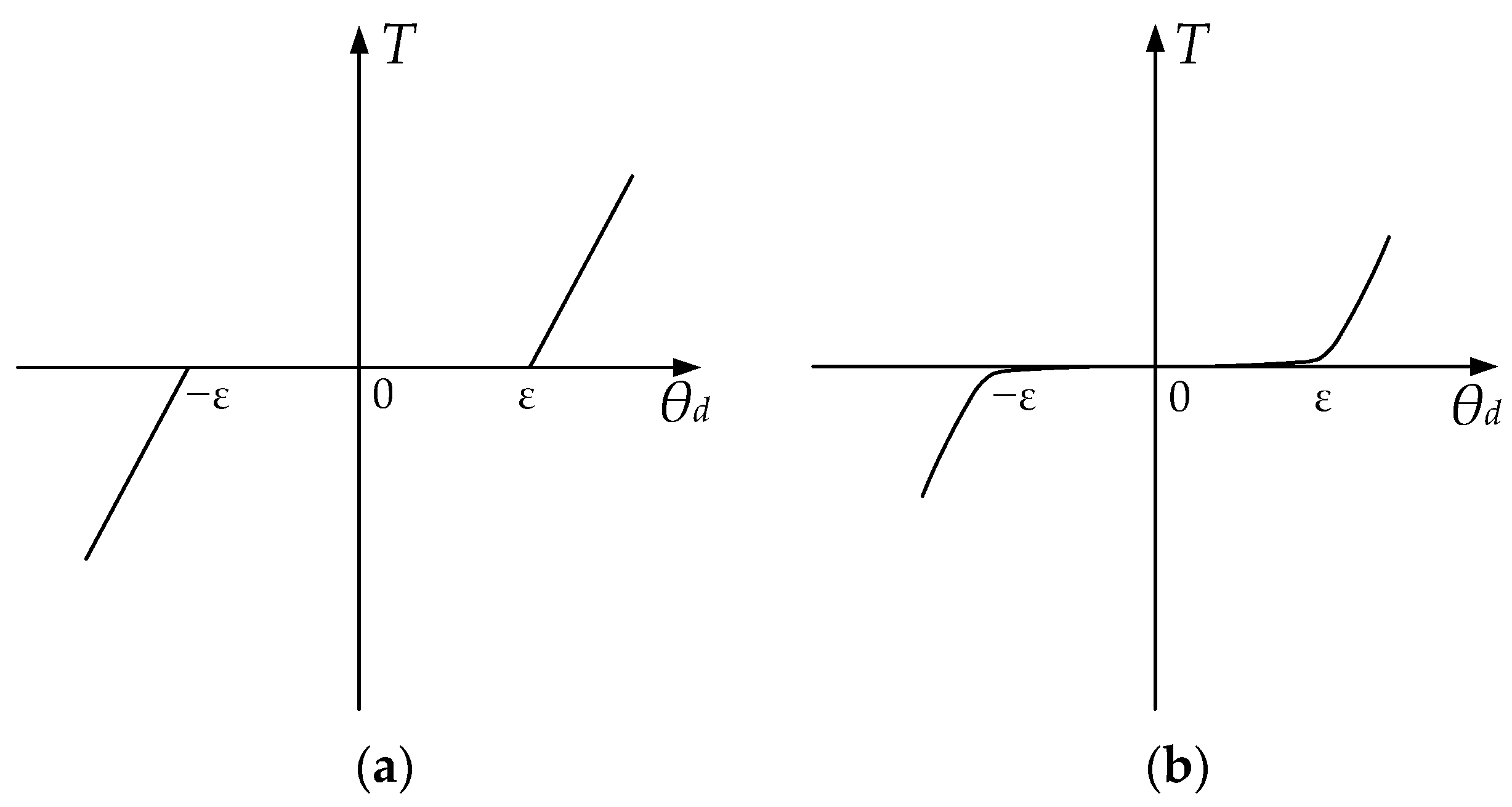
The rotary vector reducer, ball screws, and other traditional connections of the servo system are often accompanied by a nonlinear gap, typically in the form of a certain amount of clearance, with the aim of ensuring the transmission of flexibility to avoid jamming. However, the long-term operation of machinery and equipment, coupled with the inevitable effects of wear and tear, will also result in an increase in the gap. The introduction of the gap will further exacerbate the mechanical resonance. With regard to the study of clearance, the current prevailing approach is the approximate dead zone model and the dead zone model [
14], as illustrated in
Figure 1a,b. While the former model, despite its greater accuracy, is relatively complex and has a limited impact on the primary calculation interval, this paper establishes a dead zone model for study.
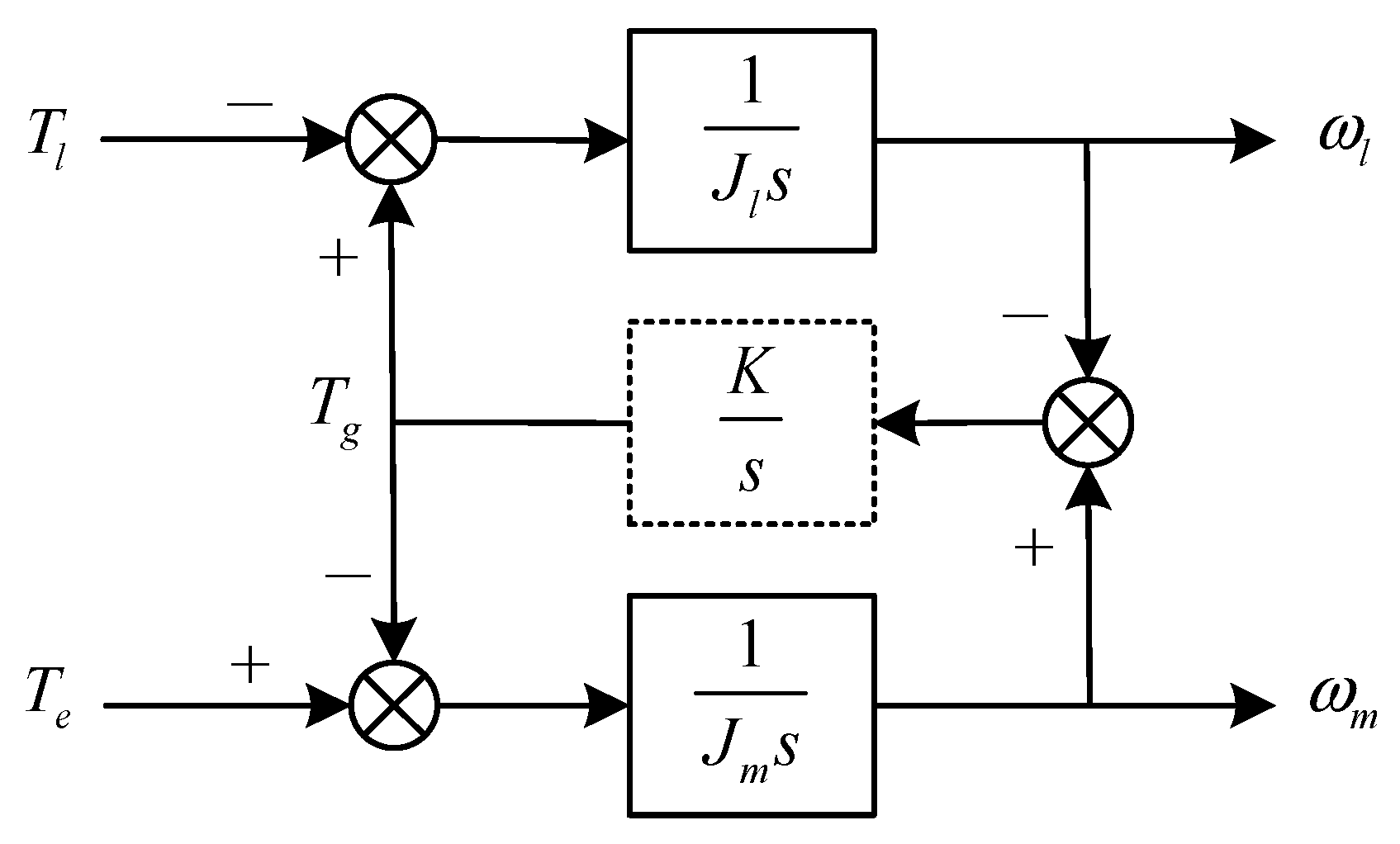
Thus, as
Figure 2 shows, in a dual-inertia system, the drive motor and the load are connected via a driveshaft with a torsional stiffness of
K, a damping coefficient of
c, a clearance of 2
ε, and a simplified ratio of 1. In this regard, Wang et al. proposed a block diagram of an equivalent model for a dual-inertia system [
12].
Consider that the effect of the gap is mainly reflected in the initial position of non-engagement or changes in the direction of motion to produce positioning errors, while in the identification of mechanical parameters can be maintained in one direction of rotation, necessarily engaged. Therefore, the clearance only has an effect at the initial stage of identification and does not affect the final iteration results. Neglecting the gap, the coupling inertia and the damping coefficient of each part—that is, the mechanical parameters to be identified—are simplified as the drive motor inertia
Jm, the coupling stiffness
K, and load inertia
Jl, and the motion process of each inertial body in the double-inertia system are analyzed to establish a mathematical model: when the drive is given a current to generate the electromagnetic torque
Te, which drives the drive motor with rotational inertia of
Jm to rotate; the load side is static due to the inertia; and there is an angular difference, it causes the drive shaft to twist and deform, generating transfer torque. This torque is both the load torque of the drive motor and the driving torque of the load, which acts together with the load-side torque
Tl to determine the load speed. The mathematical model of the above process is as follows:
A simplified block diagram of the dual-inertia system is shown in
Figure 3 [
14].
From the diagram above,
A(
s) and
B(
s) are the transfer function; the transfer equation can be defined as
In Equation (2), T(s) represents electromagnetic torque and Gl(s) represents the relationship between electromagnetic speed and electromechanical torque.
The
A(
s) and
B(
s) in the equation is
The motor speed is determined by the electromagnetic torque and load torque together, and its transfer function is
where the transfer function from motor speed to electromagnetic torque is
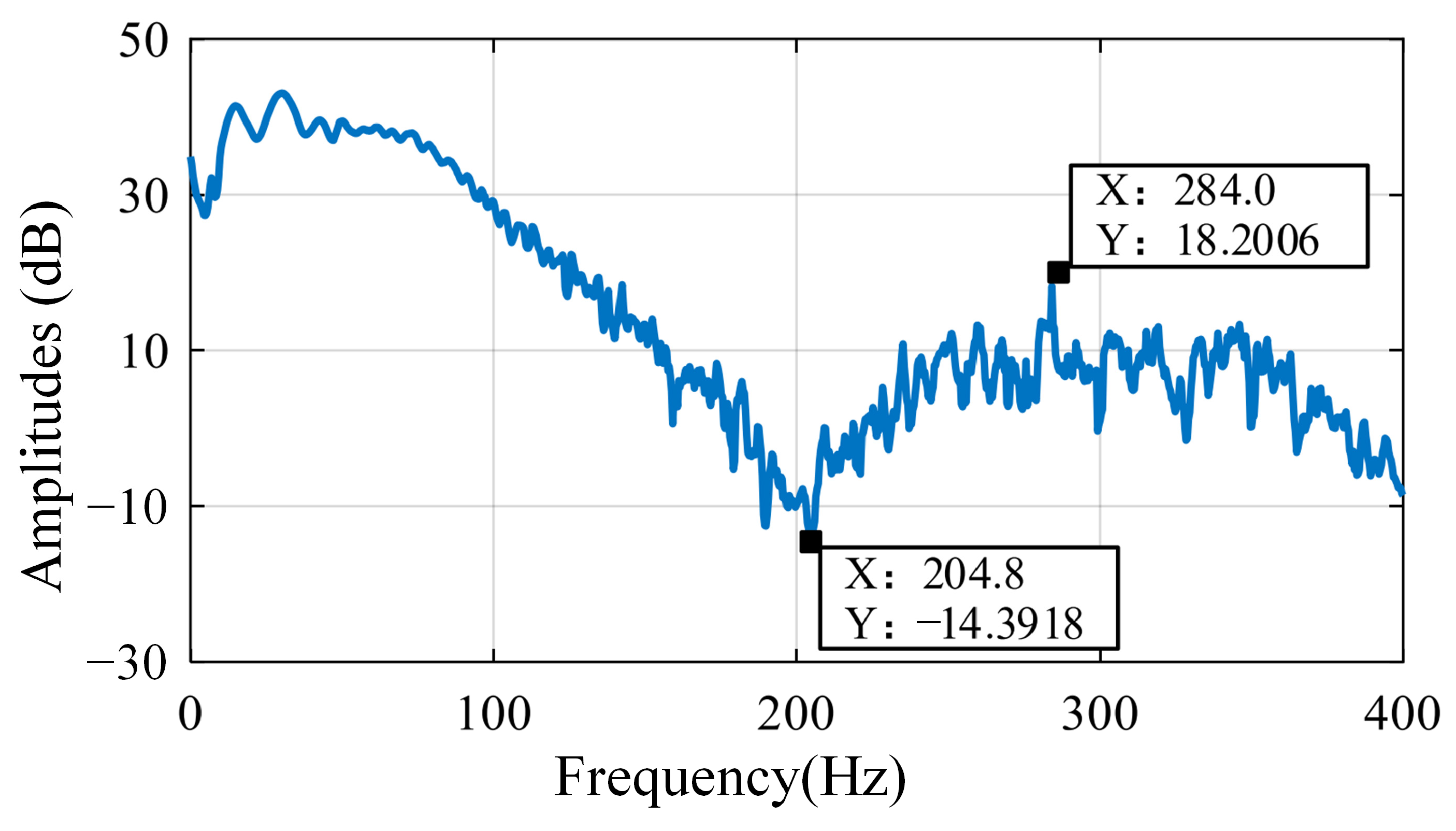
From (5), the system exhibits a pair of conjugate zero poles; the conjugate zero point is the anti-resonance frequency (ARF); the conjugate poles are the natural torsional frequency (NTF); the zero poles make the system produce a relatively strong response to the input of a specific frequency, i.e., trigger mechanical resonance.
5. Influence of System Parameters on Recognition Accuracy
- (1)
Discrete time
Yang, M. et al. point out that the smaller the discretization period is, the closer the discrete domain function is to the continuous domain function, and the higher the discrimination accuracy is [
16]. In order to correspond to the experiment platform hardware, we choose the switching frequency between 1 k~10 kHz.
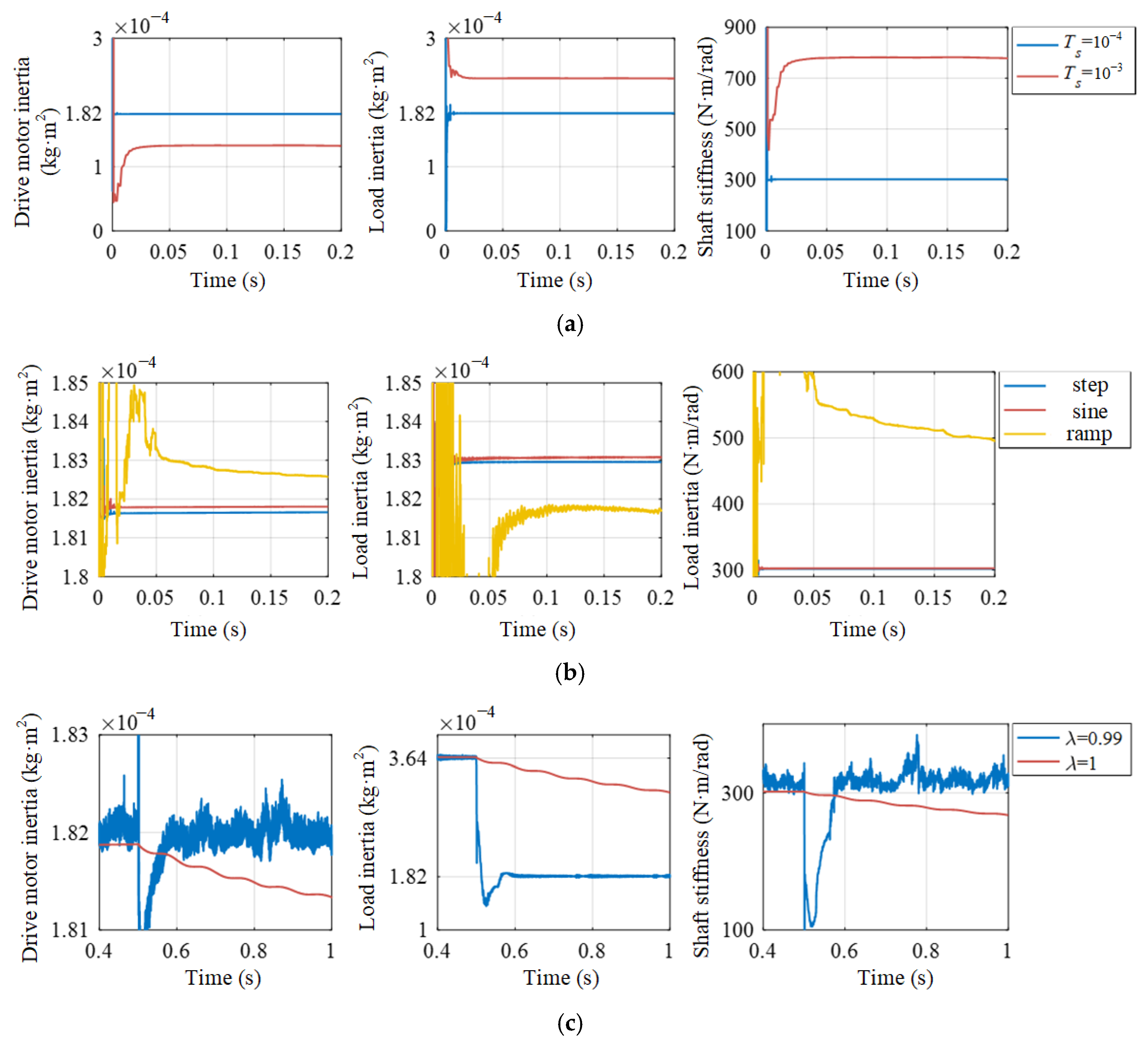
Figure 10a gives a comparison of the identification results in two cases where
Ts is 0.001 s and 0.0001 s, respectively. The convergence process of the recognition algorithm is slow when the discrete period is large. The numerical accuracy of the final convergence is also poor.
- (2)
Given signal
Given different speed signals, the comparison of the recognition results is shown in
Table 3. Under the three signal forms, the recognition accuracies of the inertia
Jm and
Jl on both sides are high and can reach within 1% under ideal simulation conditions. However, the identification error of the shaft stiffness
K under the slope given speed signal is extremely high, as high as 40.3%. As the slope of the given signal increases, the identification error decreases significantly. The simulation waveforms are shown in
Figure 10b for the second, fourth, and sixth given signals. The convergence speeds and recognition accuracies of the step signal and sinusoidal signal do not differ much, but the convergence speeds are relatively slow, and the recognition results fluctuate a lot in the slope of the given signal. From the derivation of the algorithm, it can be seen that the recognition process depends on the transient process of the motor speed rise, while the acceleration is small and the transient process is short when the ramp is given, which is not conducive to the recognition.
- (3)
Forgetting factor
As mentioned before, the forgetting factor λ affects the convergence speed and volatility of the identification results. In the real working condition, the weapon station will have the situation of sudden unloading, which leads to the sudden change in inertia on the load side. Therefore, relevant experiments are needed to verify the robustness of the algorithm.
Figure 10c shows the recognition waveforms under different forgetting factors when the load inertia is suddenly reduced at 0.5 s. When λ = 1, the convergence is still not possible within 0.5 s, and the convergence speed is slow, but the waveform of the recognition result is smoother; when λ = 0.99, the recognition result is re-converged to the vicinity of the true value within 0.1 s, and the convergence speed is fast, but there are many signal burrs and fluctuation is large.
After comprehensive consideration, in the mechanical parameter identification experiment, this paper selected a sinusoidal signal as the given signal, with forgetting factor λ = 0.99. Discretization time needs to be based on the performance of the controller and other algorithms to further determine the time required.
6. Experimental Verification
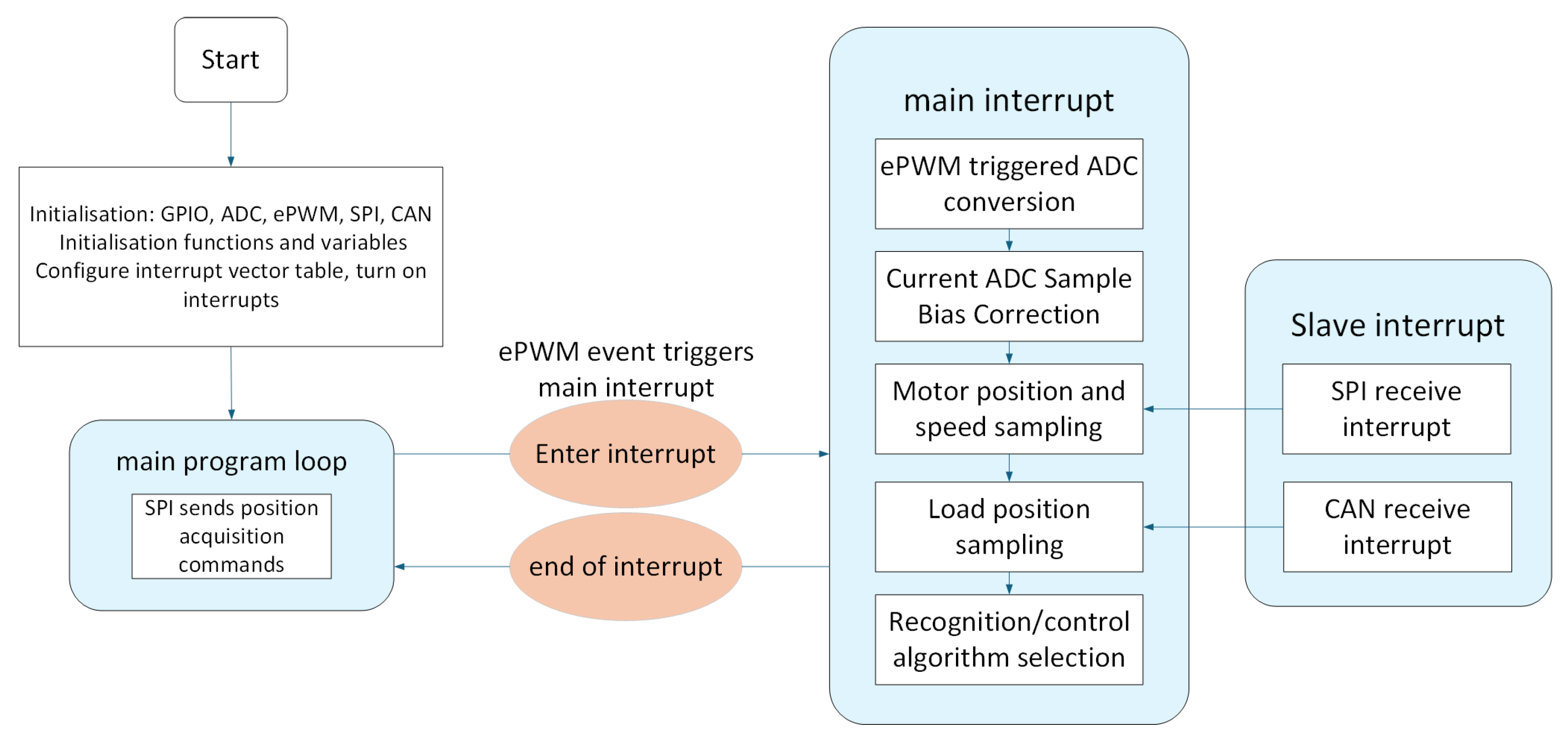
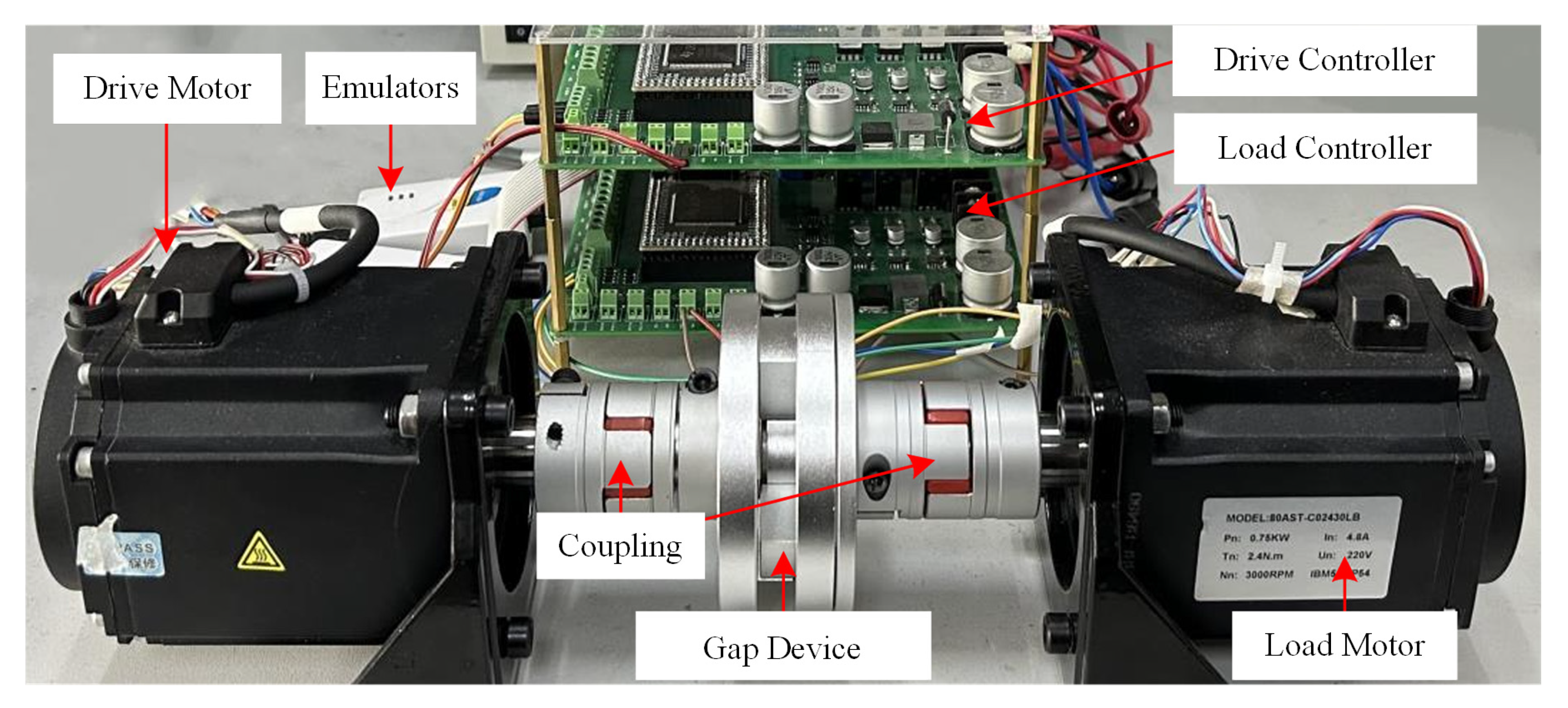
Details on the experimental platform of this research’s software platform and hardware platform are shown in
Figure 11 and
Figure 12.
The controller of the experimental platform uses the DSP TMS320F28335 chip from Texas Instruments (Dallas, TX, USA). The three-phase currents of the motor are obtained through the sampling module. Through the real-time position feedback from the 18 bits AS5047P absolute encoder, the ePWM output duty cycle is calculated and updated to drive the motor rotation. The load-side controller is the same as that of the drive-side, and both transmit position signals in both directions via CAN communication. The experimental platform uses two M02430LBX motors.
The parameters of the platform are shown in
Table 4 below.
The iterative algorithm is a fifth-order matrix operation, which takes more time, and FFRLS also has requirements for discrete time (i.e., sampling time), so it is necessary to test the algorithm time. The clock period of the controller used in the experiment is 0.67 ns, and the running time of the test programmed using breakpoints is 4994 clock cycles (33 μs) for the motor control programmed. The time of the parameter recognition algorithm is shown in
Table 5, with a total running time of 84 μs for no-load operation, and 121 μs for with-load operation. When the current loop control frequency is 10 kHz and the speed loop control frequency is 1 kHz, the recognition time in the loaded case the discrimination time exceeds one current loop cycle. In order to simplify the control and improve the recognition accuracy as much as possible, the sampling time is 0.0002 s.
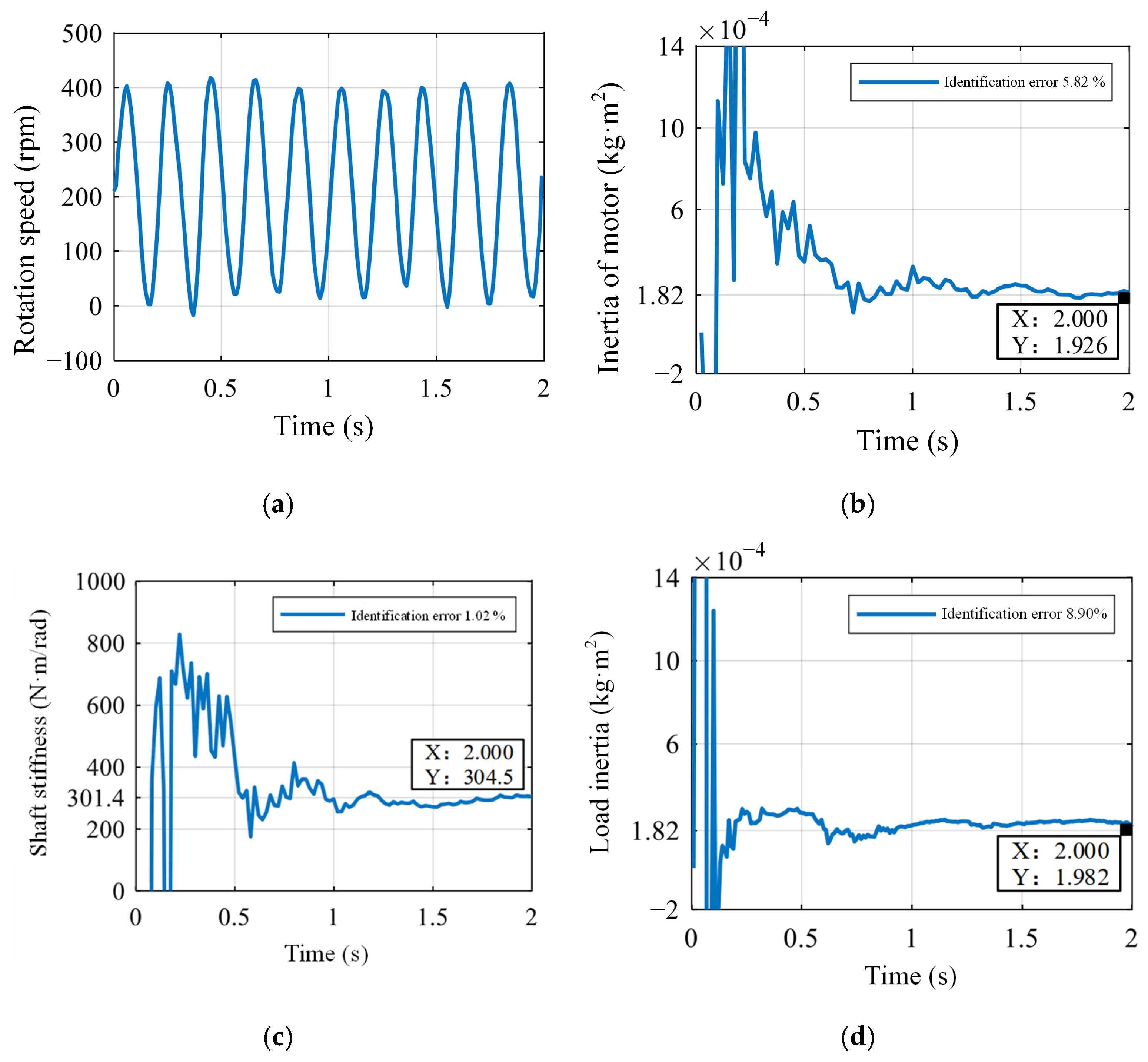
Given
nr* = 200 + 200 sin (5πt) rpm with sinusoidal speed, the system response waveform and the convergence waveform of the discriminated values of mechanical parameters are shown in
Figure 13. It is considered to be basically converged in 0.6 s, and the discriminated values of the drive motor inertia, load inertia, and shaft stiffness in 2 s are 1.93 × 10
−4 kg·m
2, 1.98 × 10
−4 kg·m
2, and 304.5 N·m/rad, with identification errors of 5.82%, 8.90%, and 1.02%, respectively.
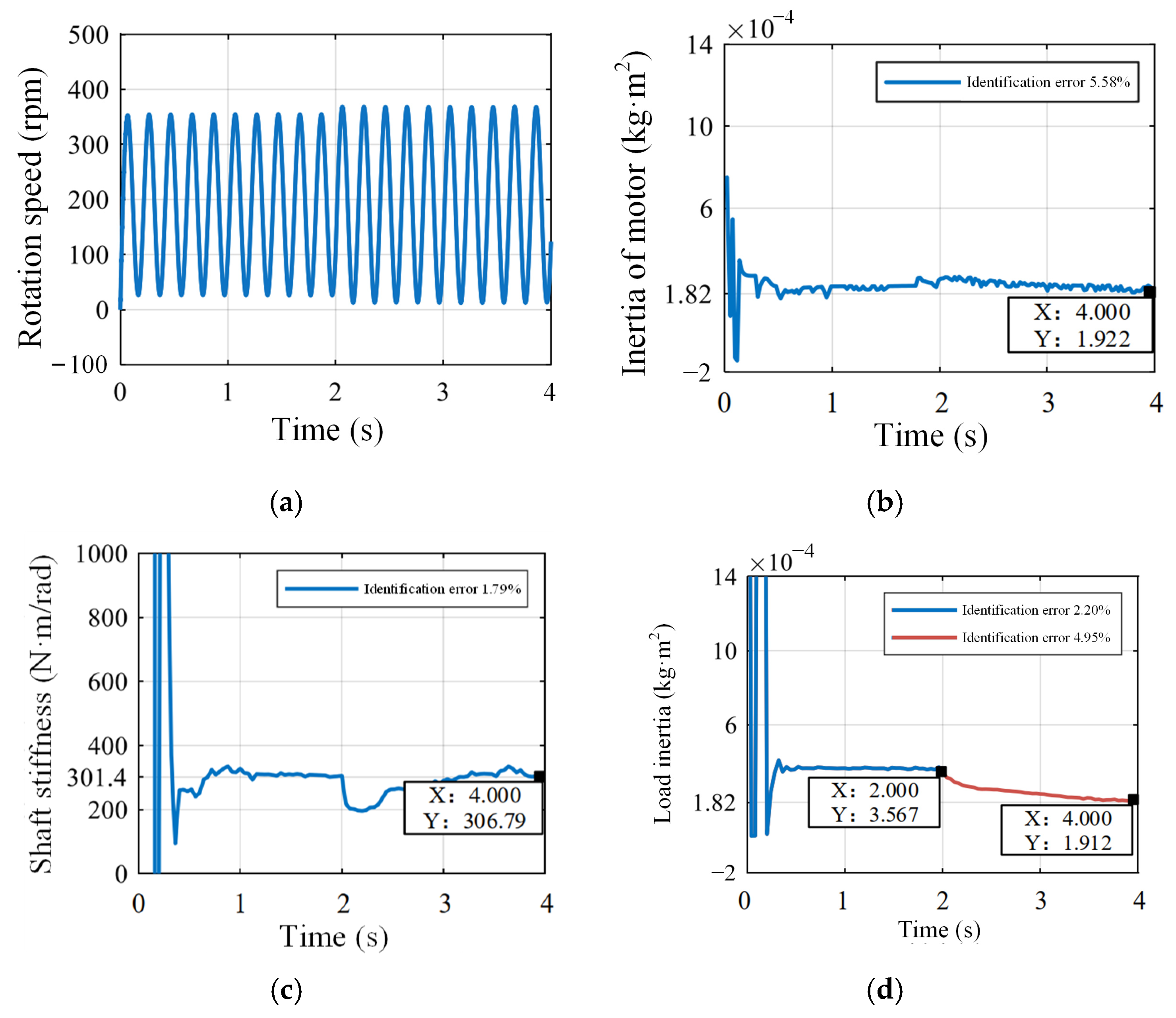
Figure 14 shows the system response and recognition waveforms when the load inertia changes suddenly. The load inertia decreases from 2
Jl to
Jl at 2 s, the drive motor inertia and shaft stiffness converge to the real value after fluctuation, while the load inertia converges slower and the recognition accuracy decreases from 2.2% to 4.95%, which is due to the fact that the covariance matrix
P is not re-initialized.
The experiment shows that the mechanical parameter identification algorithm of the dual-inertia system can simultaneously identify three main mechanical parameters online. From the experiment results shown in
Figure 13 and
Figure 14, all the identification errors are less than 10%, which shows the algorithm has high identification accuracy and certain robustness.
7. Conclusions
In this paper, a new algorithm is constructed and validated using recursive least squares with forgetting factor for the problem of identifying the mechanical parameters of a two-inertia elastic system. First, the dual-inertia system is modeled and analyzed to obtain its mathematical model. Second, using the recursive least squares method with forgetting factor, an online identification algorithm for the main mechanical parameters of the dual-inertia system is constructed, and the drive motor inertia, load inertia, and coupling stiffness of the system are accurately obtained. This backstepping adaptive controller based on backtracking compensation can effectively compensate for the backtracking effect, improve the stability of the system, and realize accurate tracking. Finally, the algorithm is simulated and experimentally verified. The experimental results show that the algorithm can recognize the three main mechanical parameters at the same time, with high recognition accuracy and a certain robustness. However, when the system structure is unknown (single inertia, thrip inertia, and above), the identification algorithm cannot be implemented, making it necessary to conduct research on systematization and generalization algorithms in a nonlinear system.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}