
A Hybrid Dual-Axis Solar Tracking System: Combining Light-Sensing and Time-Based GPS for Optimal Energy Efficiency

 , and
, and
Abstract
1. Introduction
Importance of Using This System
2. Design Methodology
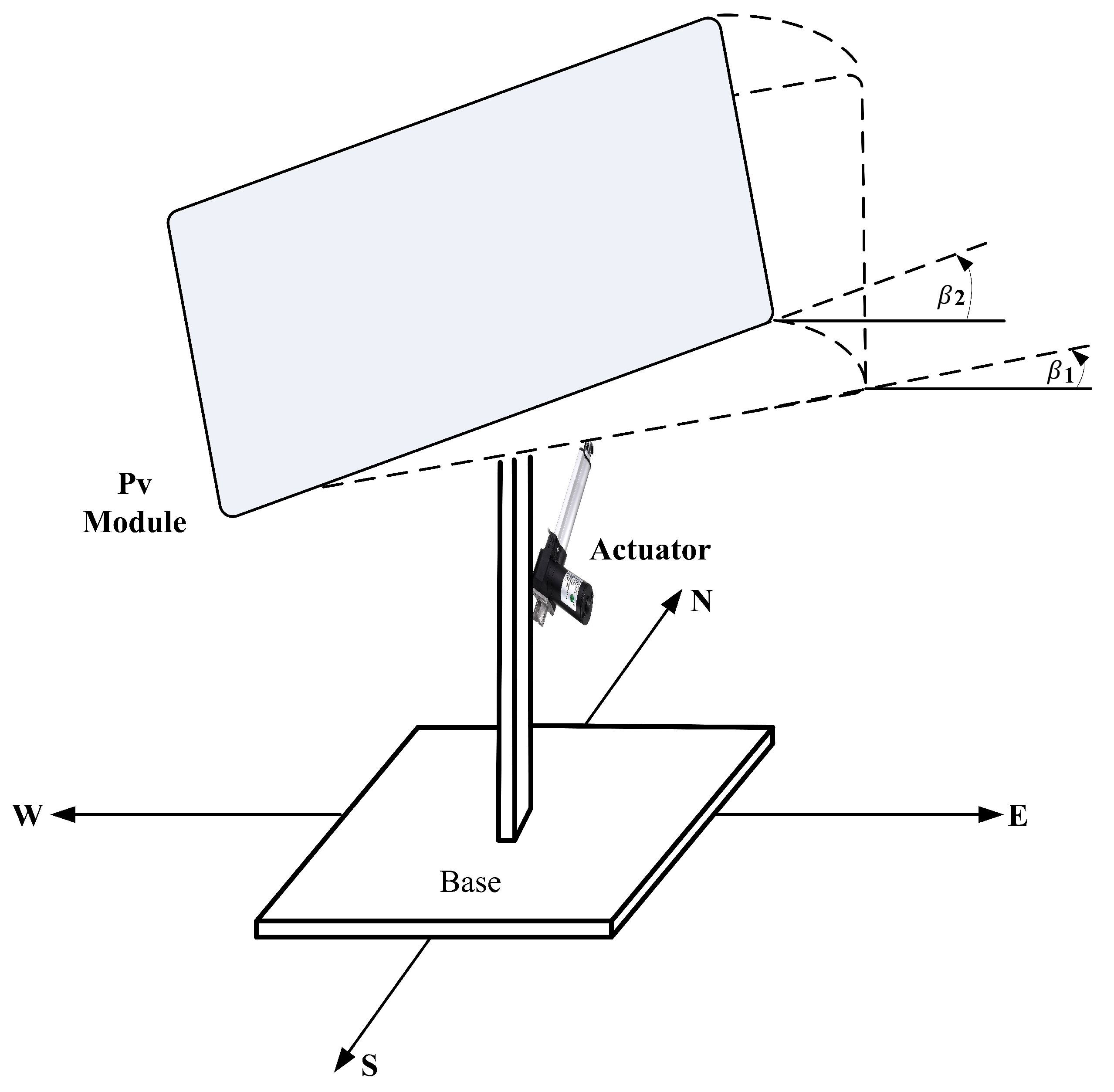
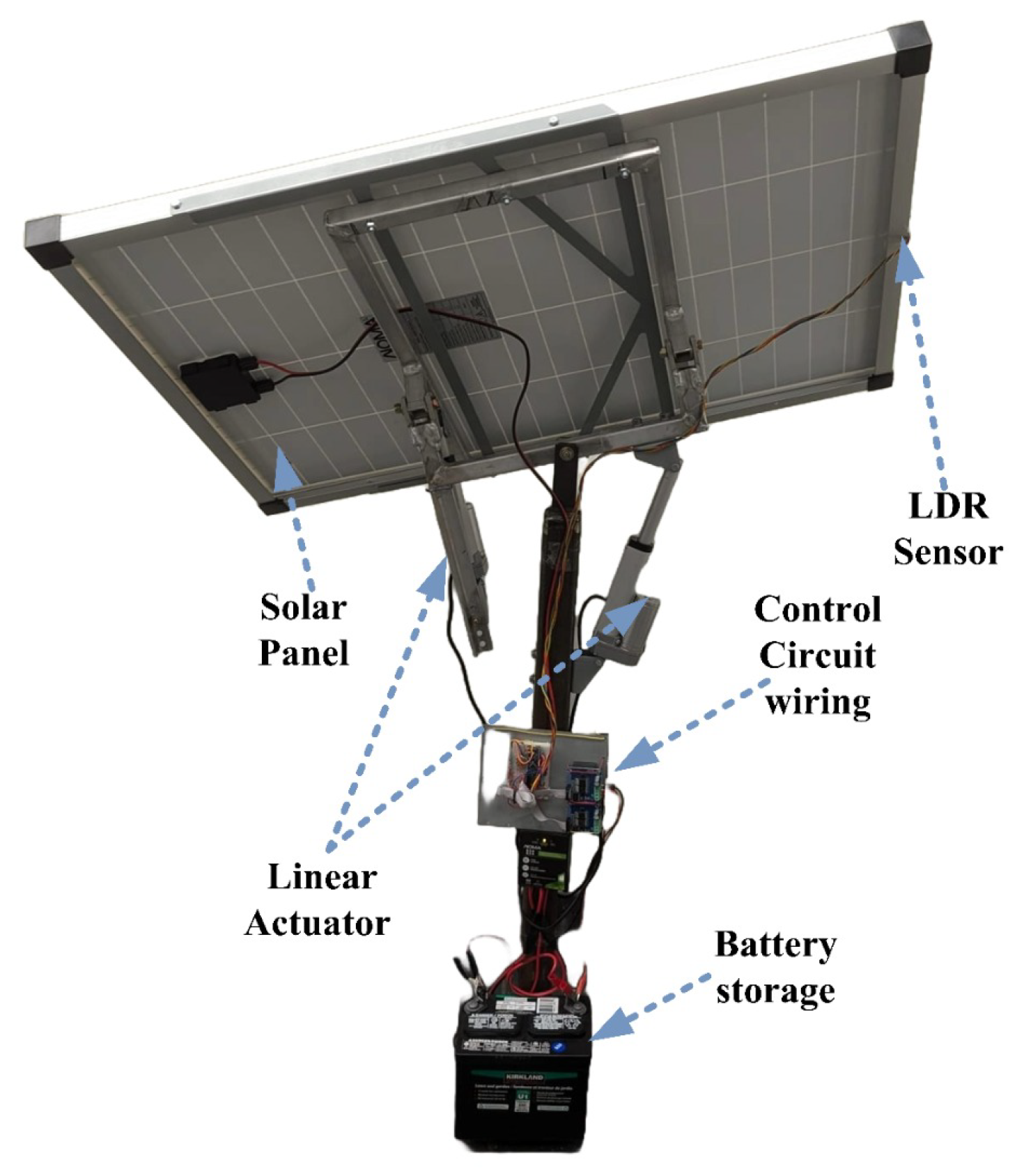
2.1. Physical Structure Design
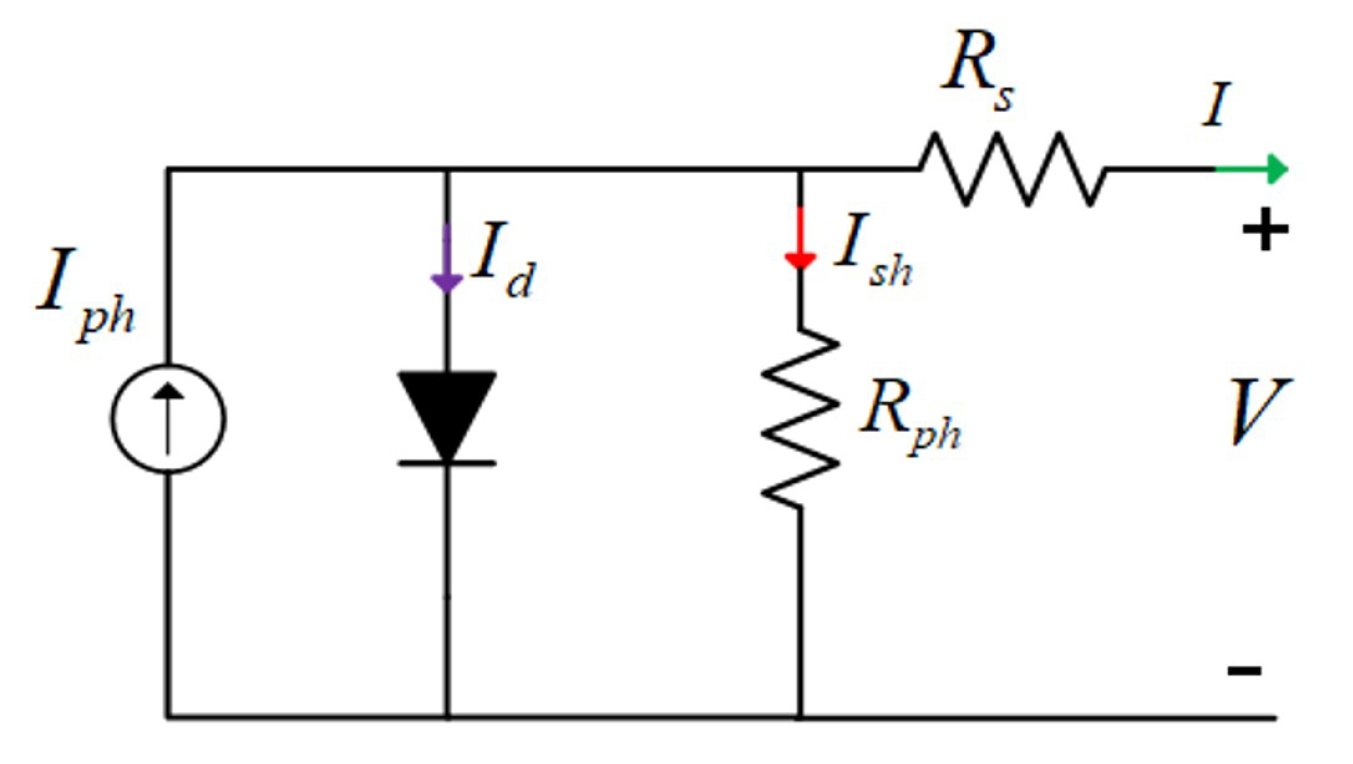
2.2. Modeling of the PV Panel
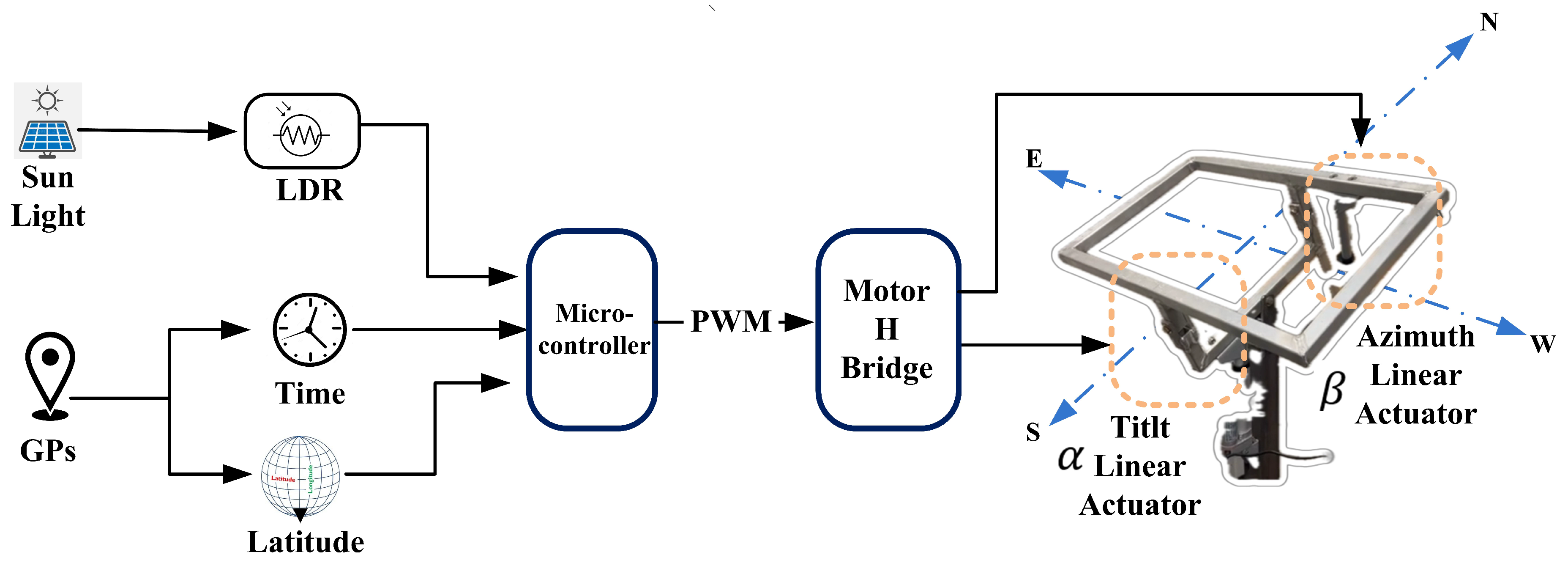
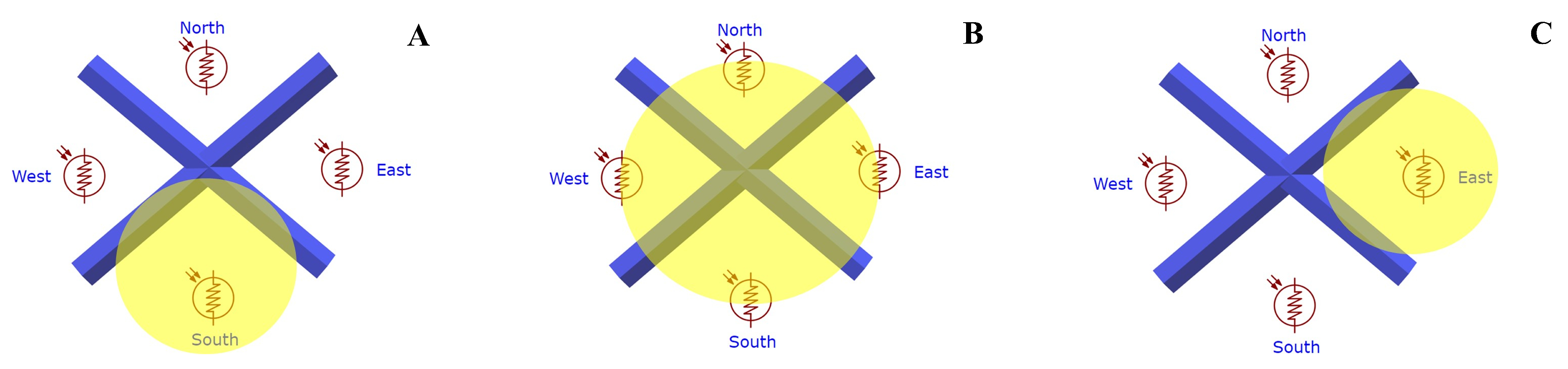
2.3. Solar Tracking System Using a Sensor
2.3.1. Mechanism for Tracking the Sun
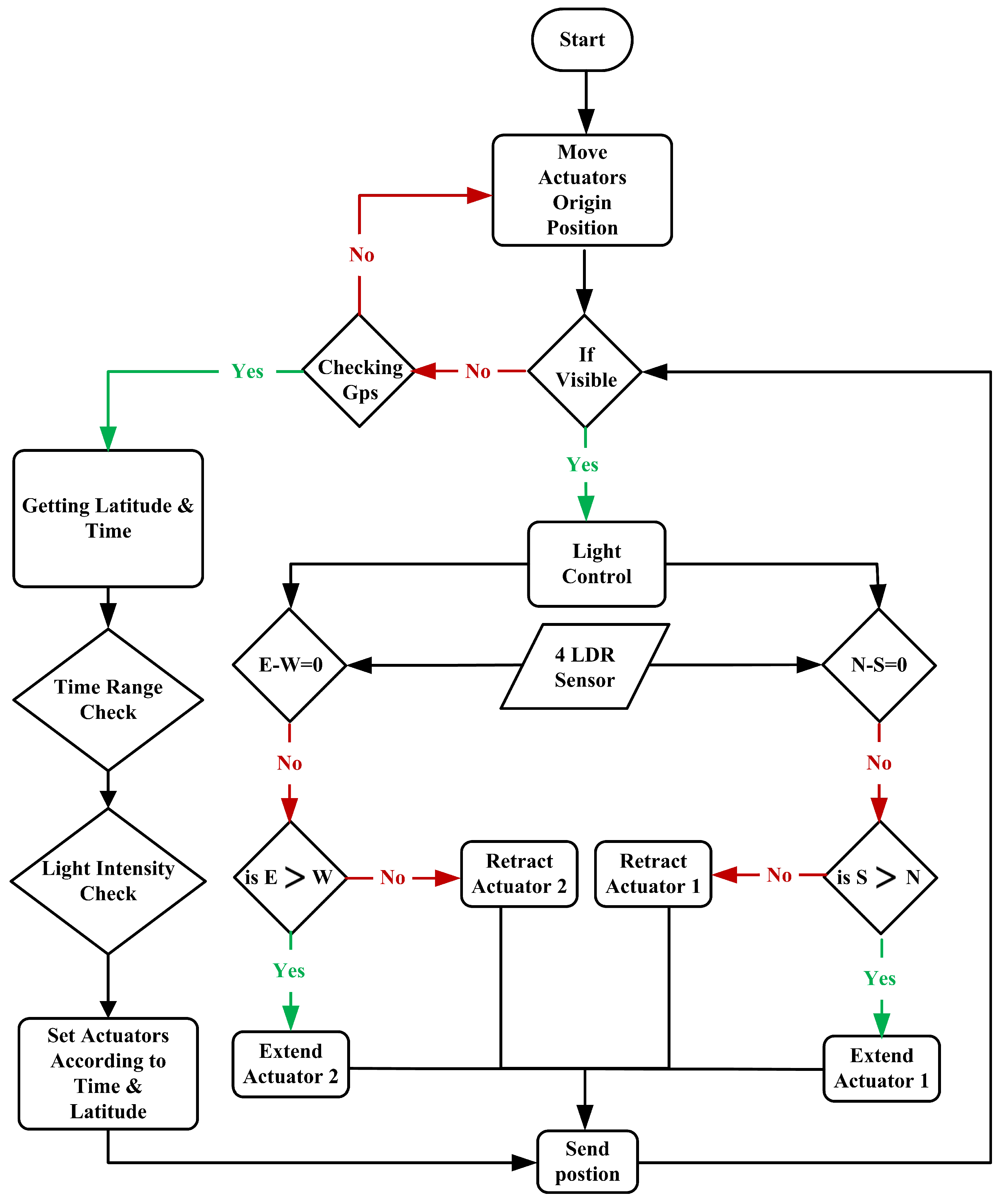
2.3.2. Algorithm Design
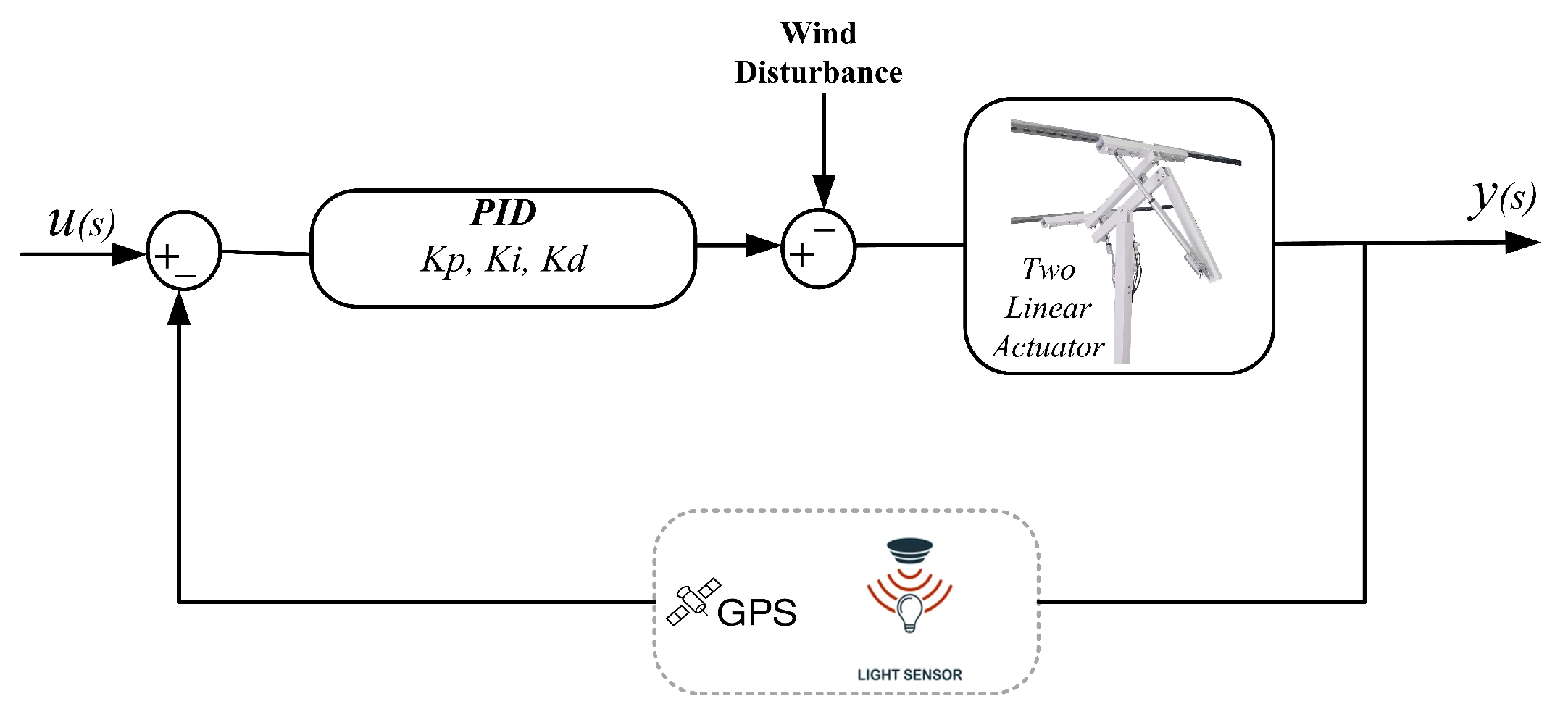
- PID control according to output/input response;
- PID control according to process model;
- PID control according to algorithmic optimization.
2.4. Time-Based Control of the System
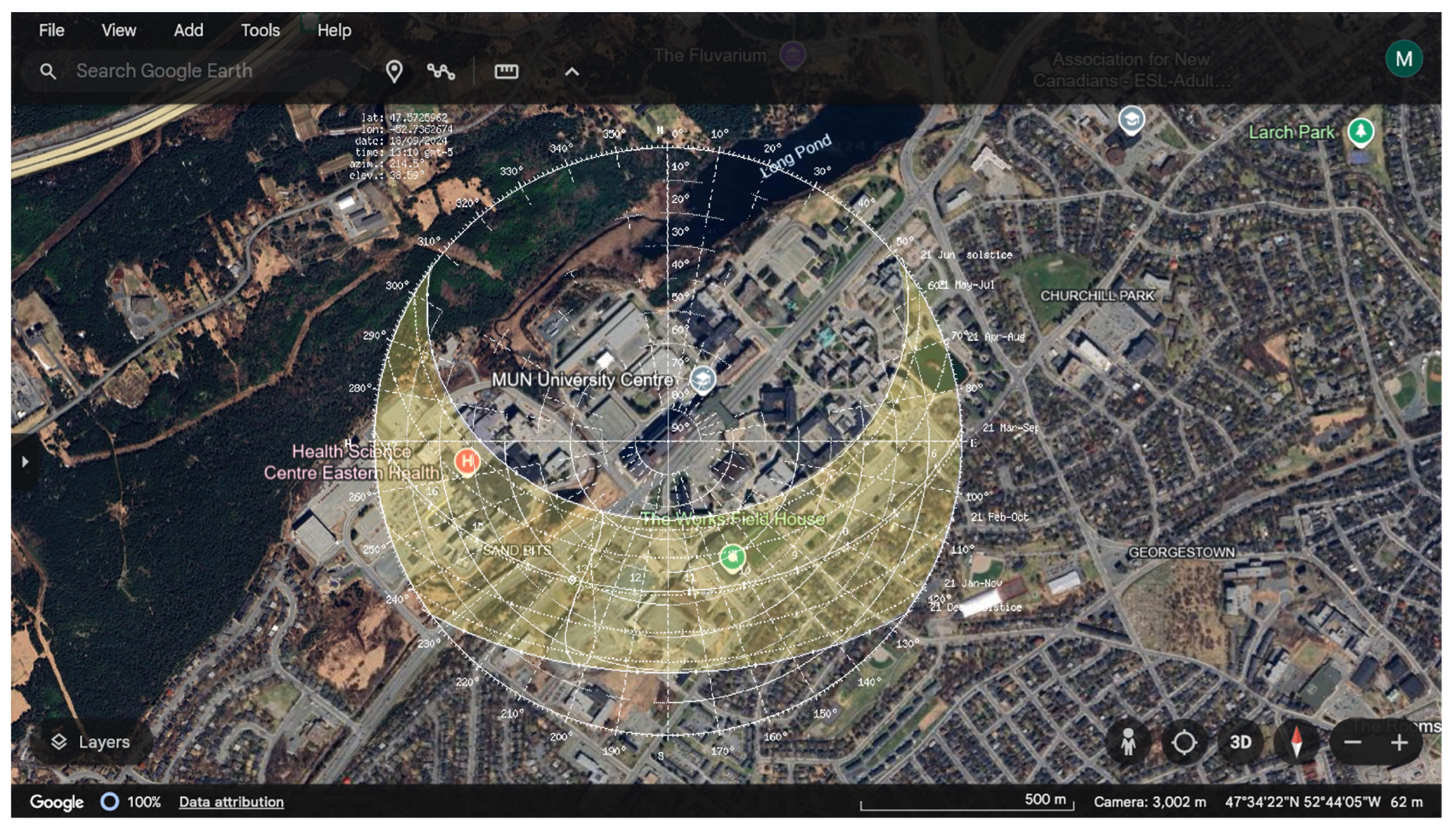
2.4.1. Determining the Decline Angle and Time-Algorithmic Formula
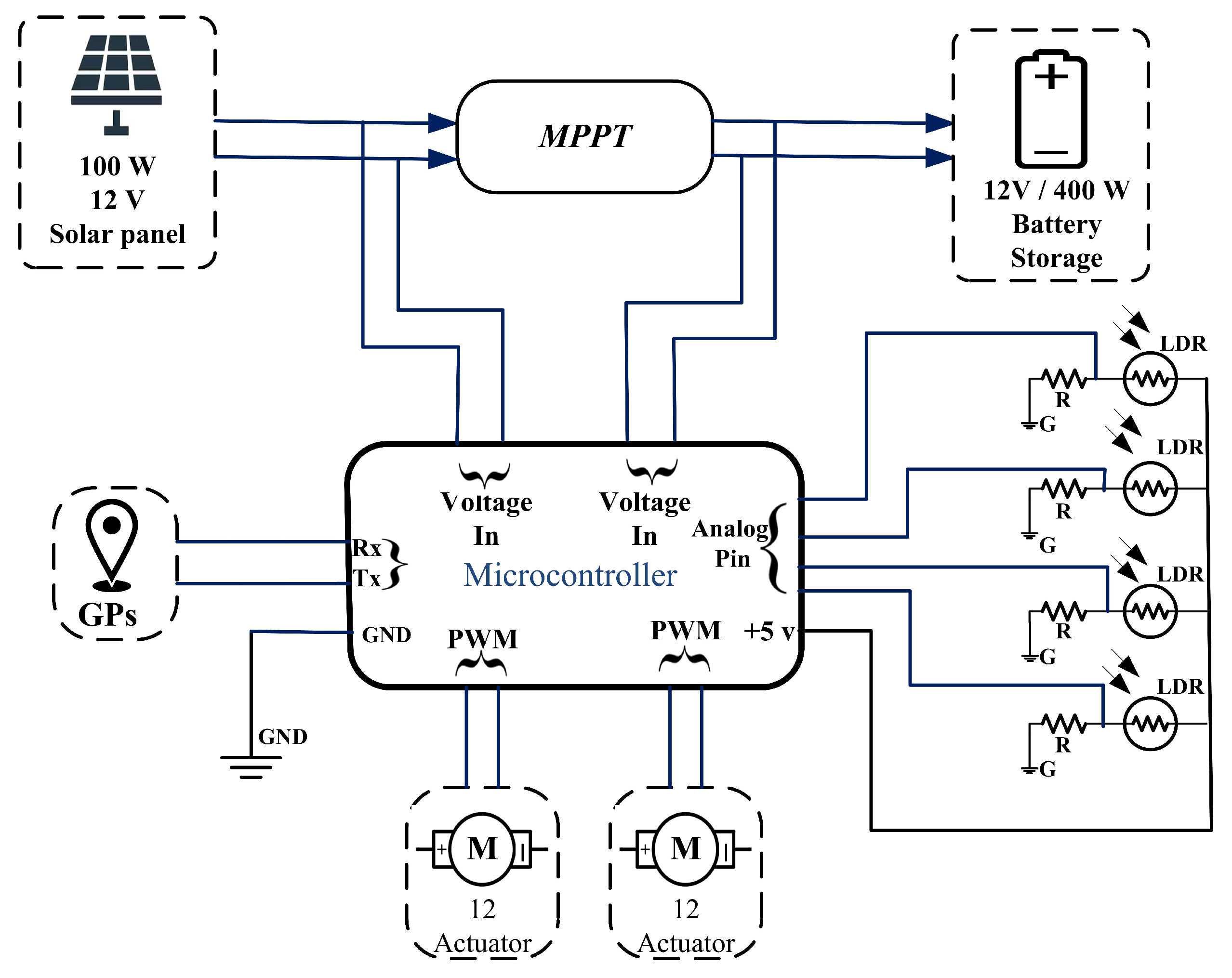
2.4.2. Systems Methodology
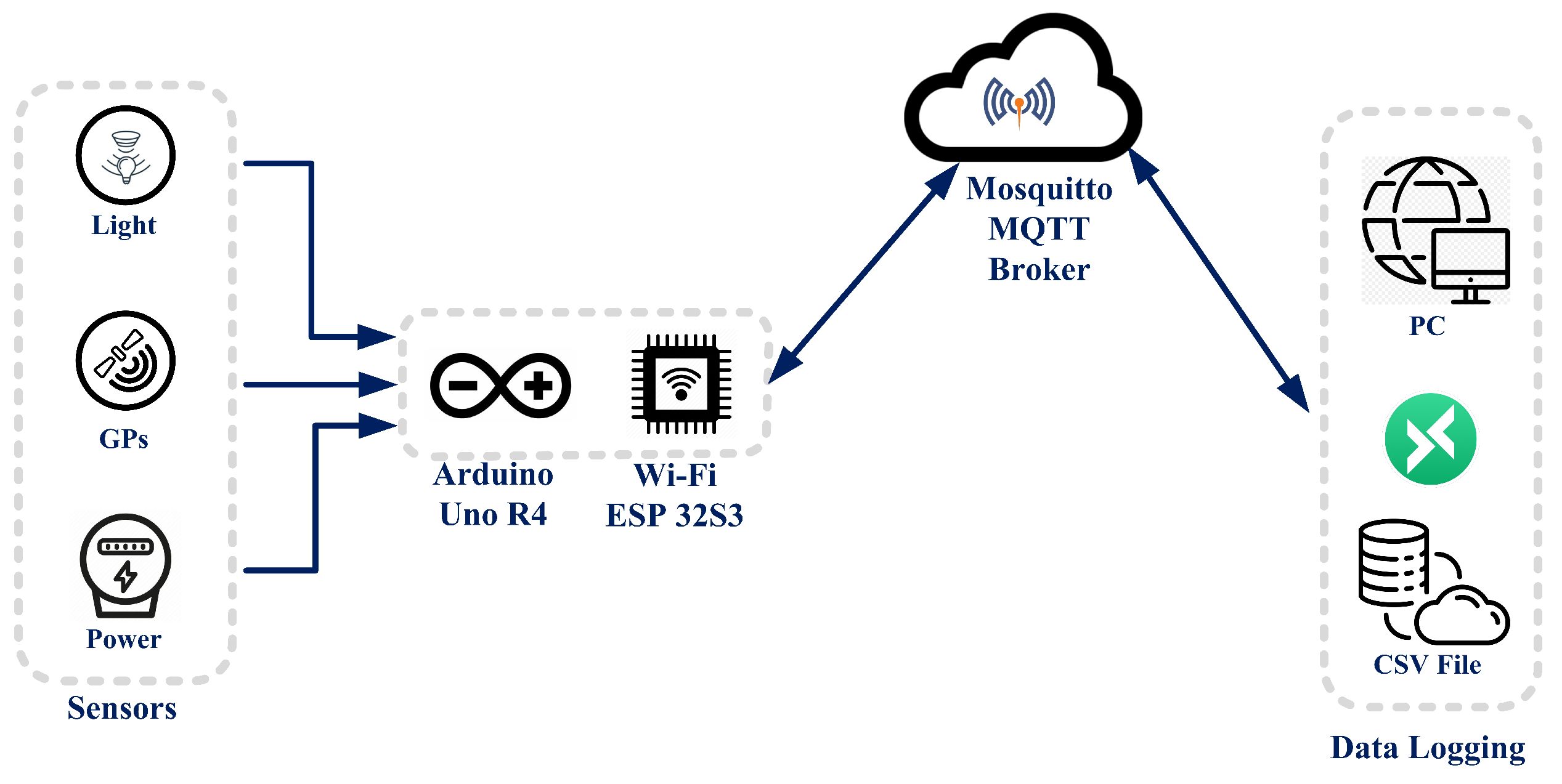
2.4.3. IoT Cloud Server
- GPS coordinates: latitude and longitude values for location tracking.
- Voltage and current: key parameters to determine the power generated by the solar panel.
- Time: for temporal analysis and logging.
- Clients: devices that can either publish (send) or subscribe to (receive) messages on specific “topics”.
- Broker: a server that facilitates communication between clients.
- the Arduino R4 solar node acts as a publisher, sending data such as time, latitude, voltage, and current to the broker under a specific topic (e.g., the solar tracker).
- the MQTT Mosquitto broker manages the communication, ensuring reliable data transmission between devices.
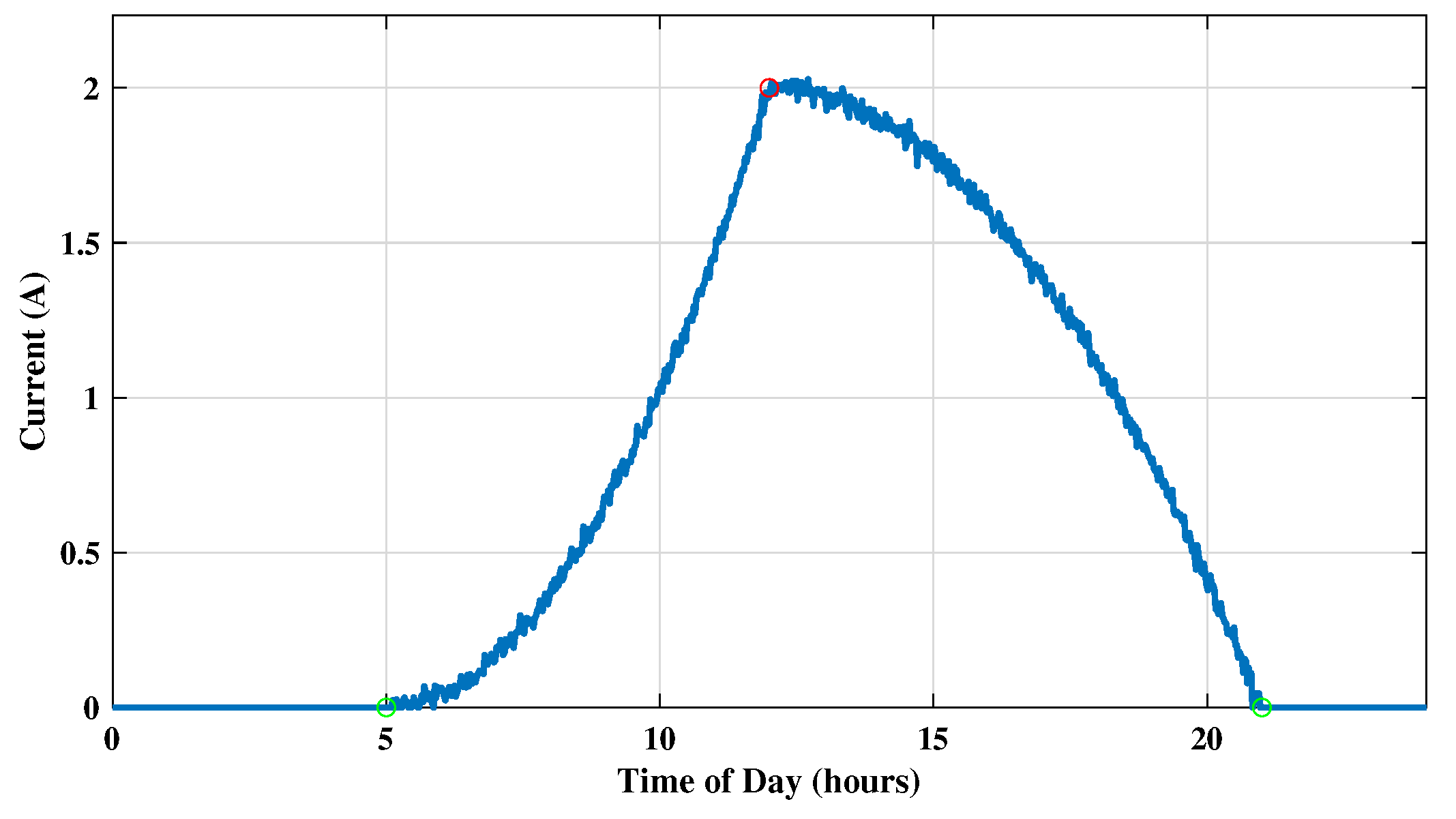
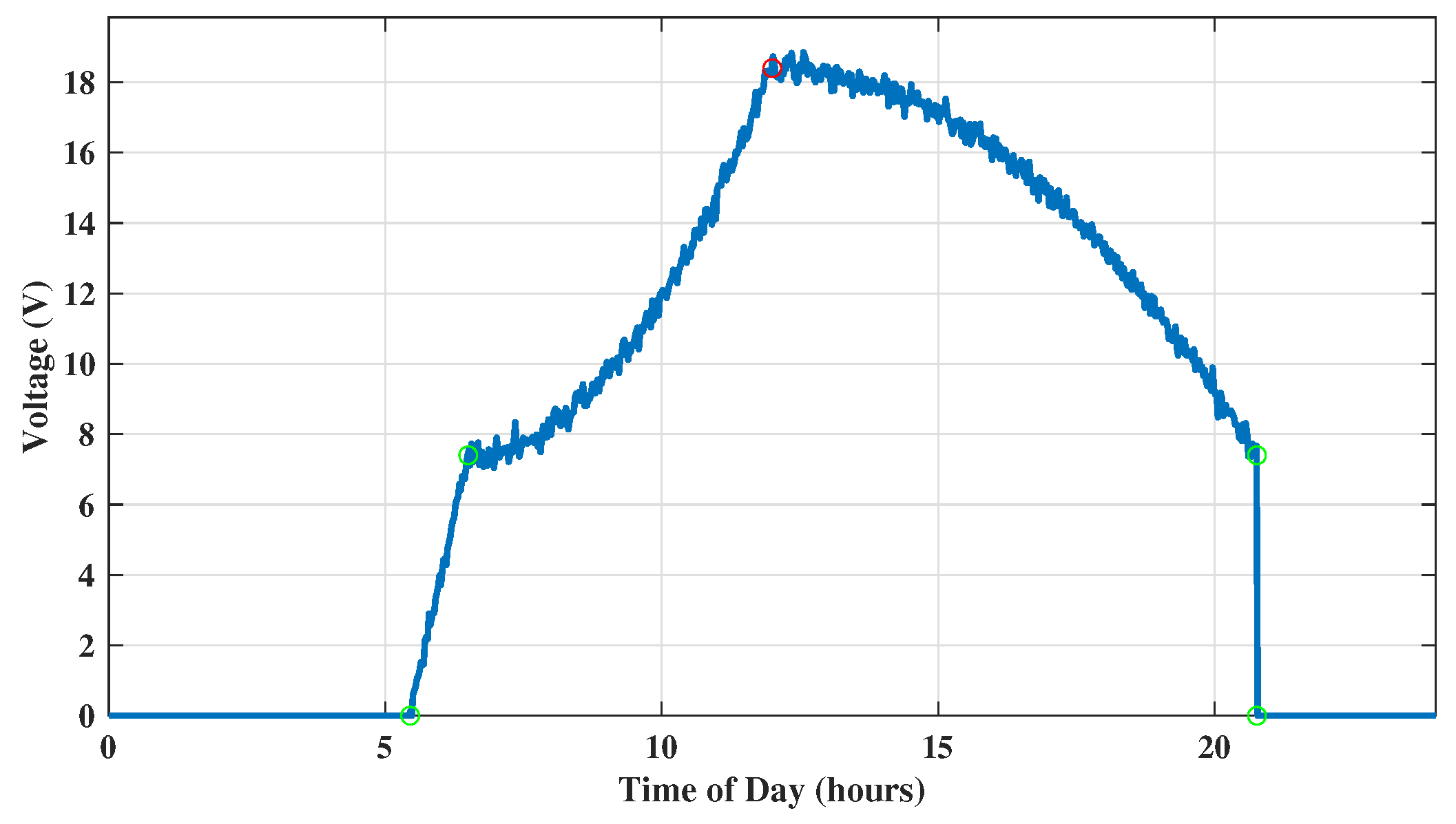
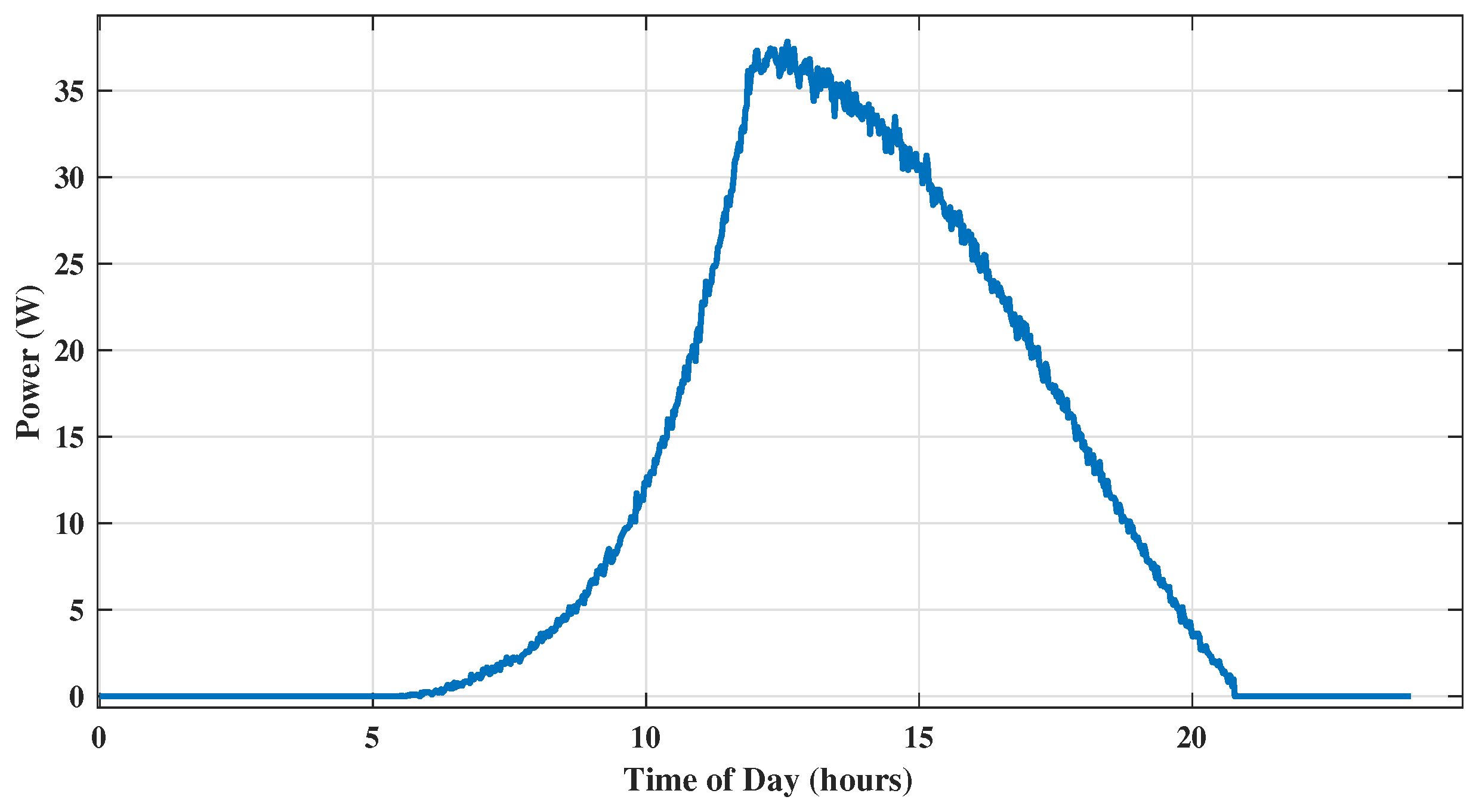
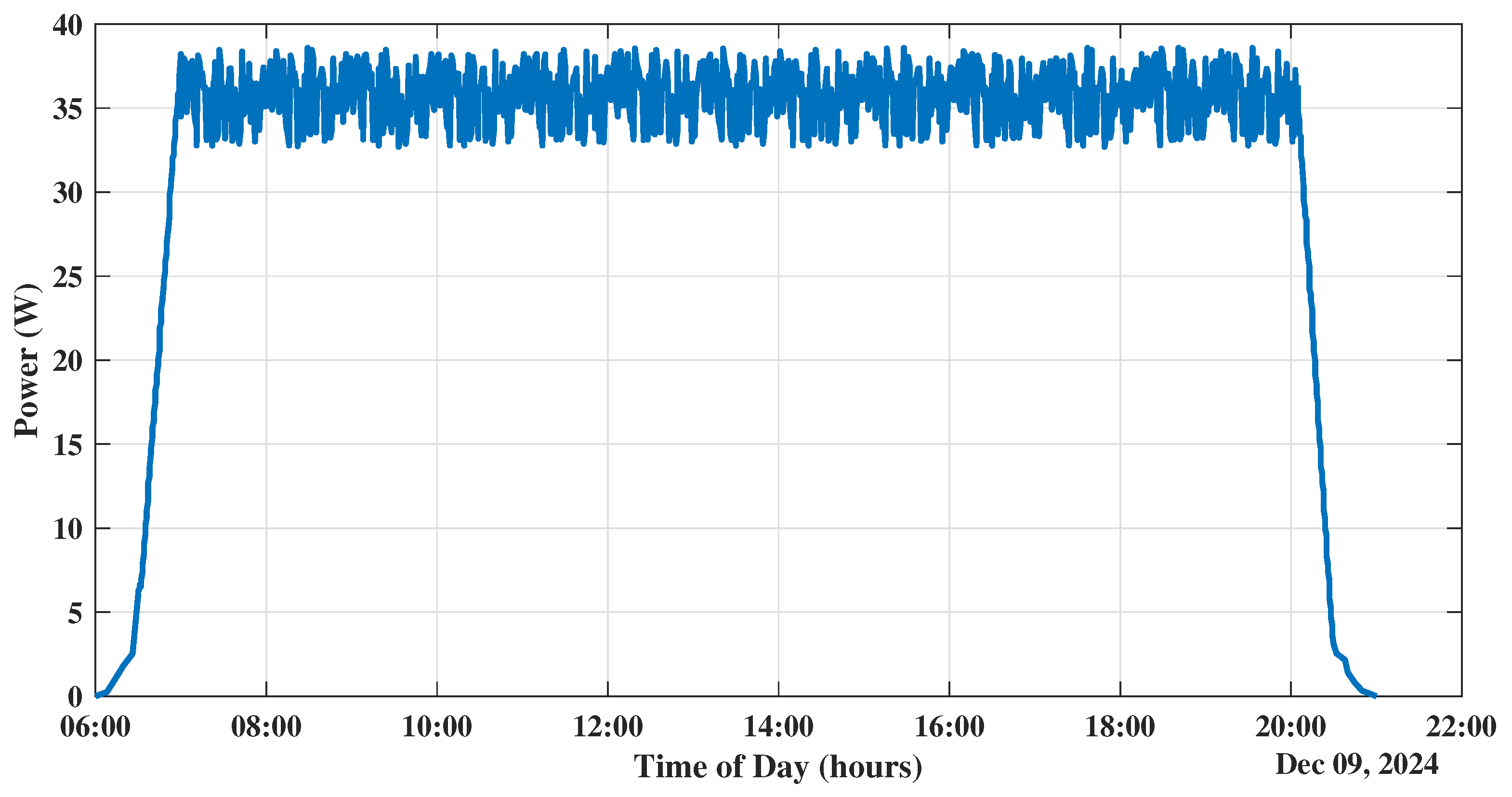
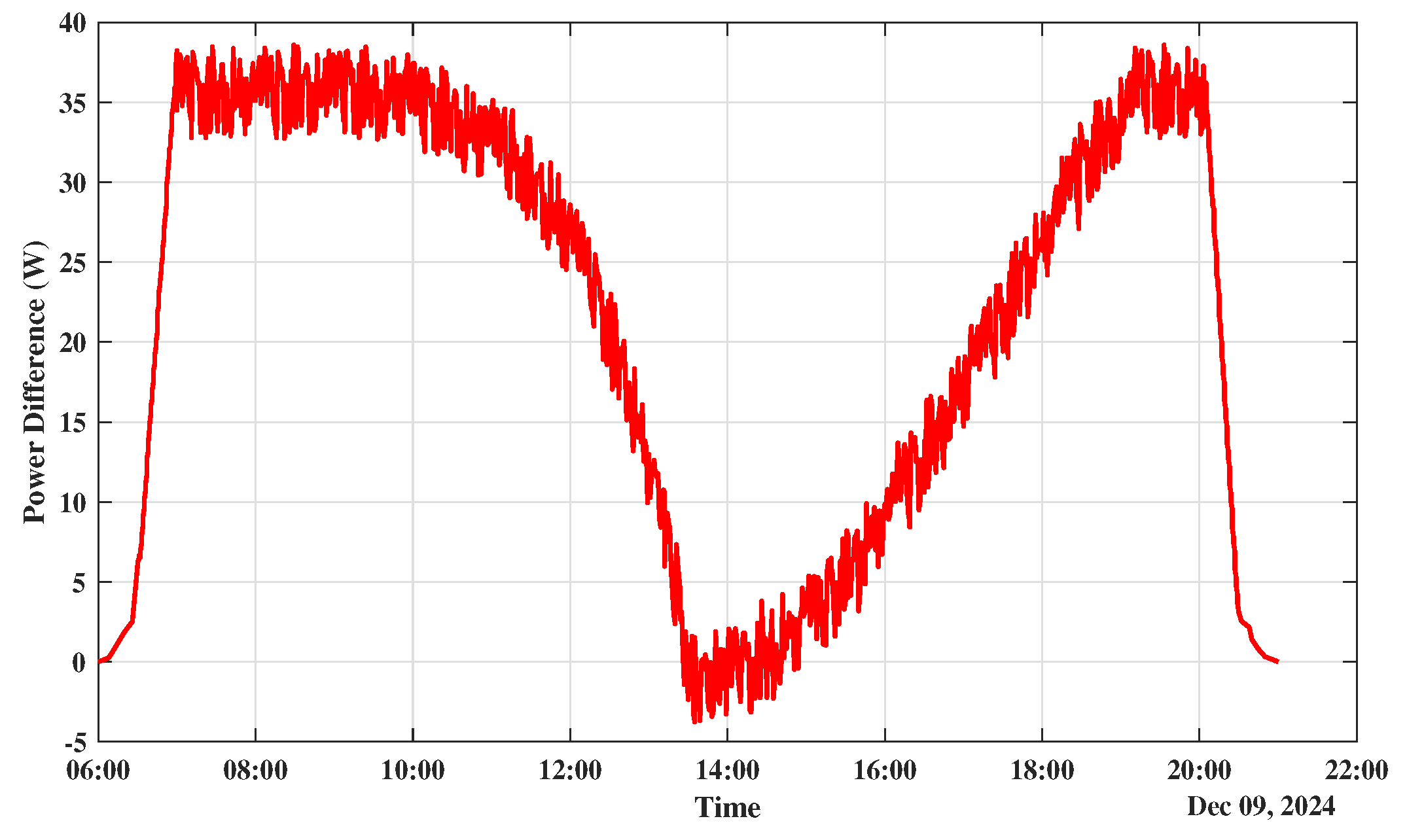
3. Results
- n is the total number of time points;
- is the total power from the photovoltaic tracking system at all time points;
- is the total power from the fixed photovoltaic system at all time points.
4. Discussion
5. Conclusions
- The dual-axis tracker enhances PV panel energy production by 33.23%.
- IoT integration supports real-time monitoring and system optimization.
- Cost analysis confirms economic viability with a 3.5 to 5-year payback period.
- The environmental impact is minimized through efficient land use.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, J.M.; Lu, C.L. Design and implementation of a sun tracker with a dual-axis single motor for an optical sensor-based photovoltaic system. Sensors 2013, 13, 3157–3168. [Google Scholar] [CrossRef] [PubMed]
- Abdullah, M.Z.; Sudiharto, I.; Eviningsih, R.P. Photovoltaic system MPPT using fuzzy logic controller. In Proceedings of the 2020 International Seminar on Application for Technology of Information and Communication (iSemantic), Semarang, Indonesia, 19–20 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 378–383. [Google Scholar]
- van Sark, W.G.; Muizebelt, P.; Cace, J.; de Vries, A.; de Rijk, P. Grid parity reached for consumers in the Netherlands. In Proceedings of the 2012 38th IEEE Photovoltaic Specialists Conference, Austin, TX, USA, 3–8 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 002462–002466. [Google Scholar]
- Candelise, C.; Winskel, M.; Gross, R.J. The dynamics of solar PV costs and prices as a challenge for technology forecasting. Renew. Sustain. Energy Rev. 2013, 26, 96–107. [Google Scholar] [CrossRef]
- Allington, L.; Cannone, C.; Pappis, I.; Barron, K.C.; Usher, W.; Pye, S.; Brown, E.; Howells, M.; Walker, M.Z.; Ahsan, A.; et al. Selected ‘Starter kit’energy system modelling data for selected countries in Africa, East Asia, and South America (# CCG, 2021). Data Brief 2022, 42, 108021. [Google Scholar] [PubMed]
- Borhanazad, H.; Mekhilef, S.; Saidur, R.; Boroumandjazi, G. Potential application of renewable energy for rural electrification in Malaysia. Renew. Energy 2013, 59, 210–219. [Google Scholar] [CrossRef]
- Juswanto, W. Renewable Energy and Sustainable Development in Pacific Island Countries; ADB Institue: Tokyo, Japan, 2016. [Google Scholar]
- Birol, F. Energy Is at the Heart of the Sustainable Development Agenda to 2030; IEA: Paris, France, 2021. [Google Scholar]
- Azam, M.S.; Bhattacharjee, A.; Hassan, M.; Rahaman, M.; Aziz, S.; Shaikh, M.A.A.; Islam, M.S. Performance enhancement of solar PV system introducing semi-continuous tracking algorithm based solar tracker. Energy 2024, 289, 129989. [Google Scholar] [CrossRef]
- Rajesh, T.; Tamilselvan, K.; Vijayalakshmi, A.; Kumar, C.N.; Reddy, K.A. Design and implementation of an automatic solar tracking system for a monocrystalline silicon material panel using MPPT algorithm. Mater. Today Proc. 2021, 45, 1783–1789. [Google Scholar] [CrossRef]
- Chander, M.; Chopra, K.; Joshi, J.; Mukerjee, A. Comparative study of different orientations of photovoltaic system. Sol. Wind Technol. 1988, 5, 329–334. [Google Scholar] [CrossRef]
- Ramamurthy, V.; Tiku, P.; Radhamohan, V.; Rao, M. Evaluation of outdoor performance of polycrystalline silicon photovoltaic panel. In Proceedings of the 6th International Photovoltaic Science and Engineering Conference, New Delhi, India, 10–14 February 1992; pp. 10–14. [Google Scholar]
- Jamroen, C.; Komkum, P.; Kohsri, S.; Himananto, W.; Panupintu, S.; Unkat, S. A low-cost dual-axis solar tracking system based on digital logic design: Design and implementation. Sustain. Energy Technol. Assess. 2020, 37, 100618. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, J.; Yang, X. Design and performance analysis of a solar tracking system with a novel single-axis tracking structure to maximize energy collection. Appl. Energy 2020, 264, 114647. [Google Scholar] [CrossRef]
- Muthukumar, P.; Manikandan, S.; Muniraj, R.; Jarin, T.; Sebi, A. Energy efficient dual axis solar tracking system using IOT. Meas. Sens. 2023, 28, 100825. [Google Scholar] [CrossRef]
- Singh, R.; Kumar, S.; Gehlot, A.; Pachauri, R. An imperative role of sun trackers in photovoltaic technology: A review. Renew. Sustain. Energy Rev. 2018, 82, 3263–3278. [Google Scholar] [CrossRef]
- Fuentes-Morales, R.F.; Diaz-Ponce, A.; Peña-Cruz, M.I.; Rodrigo, P.M.; Valentín-Coronado, L.M.; Martell-Chavez, F.; Pineda-Arellano, C.A. Control algorithms applied to active solar tracking systems: A review. Sol. Energy 2020, 212, 203–219. [Google Scholar] [CrossRef]
- Abdollahpour, M.; Golzarian, M.R.; Rohani, A.; Zarchi, H.A. Development of a machine vision dual-axis solar tracking system. Sol. Energy 2018, 169, 136–143. [Google Scholar] [CrossRef]
- Alhajri, K.; Al Jahdhami, M.A.; El-Saleh, A.A. An overview on solar tracking systems. In Proceedings of the Asia Conference on Electrical, Power and Computer Engineering, Shanghai, China, 22–24 April 2022; pp. 1–6. [Google Scholar]
- Bukit, F.R.; Sani, A.; Hasugian, I.A.; Butar-Butar, T.D.P. The Affect of Solar Panel Tilt Angle with Reflector on The Output Power Using Calculation and Experimental Methods. In Proceedings of the 2022 6th International Conference on Electrical, Telecommunication and Computer Engineering (ELTICOM), Medan, Indonesia, 22–23 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 80–84. [Google Scholar]
- Stebi, M.A.; Jeyam, A. Estimation of household appliances and monitorization for impact reduction using electro chemical sensor. Int. J. Syst. Des. Comput. 2023, 1, 26–34. [Google Scholar]
- Fernández-Ahumada, L.; Ramírez-Faz, J.; López-Luque, R.; Varo-Martínez, M.; Moreno-García, I.; De La Torre, F.C. Influence of the design variables of photovoltaic plants with two-axis solar tracking on the optimization of the tracking and backtracking trajectory. Sol. Energy 2020, 208, 89–100. [Google Scholar] [CrossRef]
- Kavlak, G.; McNerney, J.; Trancik, J.E. Evaluating the causes of cost reduction in photovoltaic modules. Energy Policy 2018, 123, 700–710. [Google Scholar] [CrossRef]
- Nonhebel, S. Renewable energy and food supply: Will there be enough land? Renew. Sustain. Energy Rev. 2005, 9, 191–201. [Google Scholar] [CrossRef]
- Rejeb, O.; Radwan, A.; Abo-Zahhad, E.M.; Ghenai, C.; Serageldin, A.A.; Ahmed, M.; El-Shazly, A.A.; Bettayeb, M.; Abdelrehim, O. Numerical analysis of passive cooled ultra-high concentrator photovoltaic cell using optimal heat spreader design. Case Stud. Therm. Eng. 2020, 22, 100757. [Google Scholar] [CrossRef]
- Badr, F.; Radwan, A.; Ahmed, M.; Hamed, A.M. An experimental study of the concentrator photovoltaic/thermoelectric generator performance using different passive cooling methods. Renew. Energy 2022, 185, 1078–1094. [Google Scholar] [CrossRef]
- Ma, T.; Li, Z.; Zhao, J. Photovoltaic panel integrated with phase change materials (PV-PCM): Technology overview and materials selection. Renew. Sustain. Energy Rev. 2019, 116, 109406. [Google Scholar] [CrossRef]
- Taheri, A.; Malayjerdi, M.; Kazemi, M.; Kalani, H.; Nemati-Farouji, R.; Passandideh-Fard, M.; Sardarabadi, M. Improving the performance of a nanofluid-based photovoltaic thermal module utilizing dual-axis solar tracker system: Experimental examination and thermodynamic analysis. Appl. Therm. Eng. 2021, 196, 117178. [Google Scholar] [CrossRef]
- Tiwari, H.; Ghosh, A. Power flow control in solar PV fed DC Microgrid with storage. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Patel, K.; Borole, S.; Ramaneti, K.; Hejib, A.; Singh, R.R. Design and implementation of sun tracking solar panel and smart wiping mechanism using tinkercad. IOP Conf. Ser. Mater. Sci. Eng. 2020, 906, 012030. [Google Scholar] [CrossRef]
- Huang, M.; Zhou, Z. Solar Tracking and Group Control System Based on EtherCAT. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1959–1962. [Google Scholar]
- Sproul, A.B. Derivation of the solar geometric relationships using vector analysis. Renew. Energy 2007, 32, 1187–1205. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solar Tracking System | Cost of Installing the System per Watt | Recovery Time |
|---|---|---|
| Fixed solar panel | Vary from $2 to $2.4 per watt | For crystalline systems 1.5 to 3.5 years and for thin film 1 to 1.5 years. |
| Single-axis tracking | Around $1.17 per watt according to efficiency. | 3 years for tracker investment. |
| Dual-axis tracking | Around $0.36 per watt according to efficiency. | 3.5 to 5 years for tracker investment. |
| Specification of PV Under Standard Conditions | Value |
|---|---|
| Maximum power 100 W Number of cells per module | 36 |
| Open-circuit voltage | 21.5 V |
| Short-circuit current | 6.1 A |
| Voltage at maximum power point | 17.1 V |
| Current at maximum power point | 5.5 A |
| Temperature coefficient of Isc | (0.065 ± 0.015) (%)/°C |
| Temperature coefficient of Voc | −(80 ± 10) mV/°C |
| Temperature coefficient of power | 0.47 ± 0.2 (%)/°C |
| Operating temperature | −40 °C to 85 °C |
| Dimensions | 100.3 × 67.3 × 3.5 cm |
| Weight | 19 lb/8.7 kg |
| Power tolerance | ±5(%) |
| LDR1 (North) | LDR2 (South) | LDR3 (West) | LDR4 (East) | X Axis Action | Y Axis Action |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | Stop | Stop |
| 1 | 1 | 1 | 0 | Extend | Retract |
| 1 | 1 | 0 | 1 | Retract | Extend |
| 1 | 1 | 0 | 0 | Extend | Extend |
| 1 | 0 | 1 | 1 | Retract | Retract |
| 1 | 0 | 1 | 0 | Extend | Retract |
| 1 | 0 | 0 | 1 | Retract | Extend |
| 1 | 0 | 0 | 0 | Extend | Extend |
| 0 | 1 | 1 | 1 | Retract | Retract |
| 0 | 1 | 1 | 0 | Extend | Retract |
| 0 | 1 | 0 | 1 | Retract | Extend |
| 0 | 1 | 0 | 0 | Extend | Extend |
| 0 | 0 | 1 | 1 | Retract | Retract |
| 0 | 0 | 1 | 0 | Extend | Retract |
| 0 | 0 | 0 | 1 | Retract | Extend |
| 0 | 0 | 0 | 0 | Stop | Stop |
| Case | Kp | Ki | Kd | Description |
|---|---|---|---|---|
| 1 | 1.0 | 0.02 | 0.05 | Standard values for initial testing. |
| 2 | 0.5 | 0.01 | 0.02 | Lower values for smoother control response. |
| 3 | 2.0 | 0.05 | 0.10 | Higher values for more aggressive control action for faster response. |
| 4 | 1.0 | 0.02 | 0.01 | Higher derivative gain for better stability. |
| 5 | 1.0 | 2.0 | 3.0 | Higher integral action for aggressive control. |
| 6 | 1.0 | 2.0 | 3.0 | Balanced increase in Kp with standard Ki and Kd. |
| Time | Azimuth | Altitude | Position |
|---|---|---|---|
| 5:12 | 86.7 | 0 | Sunrise |
| 6:00 | 95.41 | 7.08 | |
| 7:00 | 106.95 | 16.98 | |
| 8:00 | 119.65 | 26.26 | |
| 9:00 | 134.32 | 34.33 | |
| 10:00 | 151.62 | 40.42 | |
| 11:00 | 171.39 | 43.63 | |
| 11:24 | 179.84 | 43.93 | Noon |
| 12:00 | 192.11 | 43.3 | |
| 13:00 | 211.51 | 39.51 | |
| 14:00 | 228.3 | 32.99 | |
| 15:00 | 242.56 | 24.65 | |
| 16:00 | 254.98 | 15.21 | |
| 17:00 | 266.37 | 5.22 | |
| 17:35 | 273 | 0 | Sunset |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hammas, M.; Fituri, H.; Shour, A.; Khan, A.A.; Khan, U.A.; Ahmed, S. A Hybrid Dual-Axis Solar Tracking System: Combining Light-Sensing and Time-Based GPS for Optimal Energy Efficiency. Energies 2025, 18, 217. https://doi.org/10.3390/en18010217
Hammas M, Fituri H, Shour A, Khan AA, Khan UA, Ahmed S. A Hybrid Dual-Axis Solar Tracking System: Combining Light-Sensing and Time-Based GPS for Optimal Energy Efficiency. Energies. 2025; 18(1):217. https://doi.org/10.3390/en18010217
Chicago/Turabian StyleHammas, Muhammad, Hassen Fituri, Ali Shour, Ashraf Ali Khan, Usman Ali Khan, and Shehab Ahmed. 2025. "A Hybrid Dual-Axis Solar Tracking System: Combining Light-Sensing and Time-Based GPS for Optimal Energy Efficiency" Energies 18, no. 1: 217. https://doi.org/10.3390/en18010217
APA StyleHammas, M., Fituri, H., Shour, A., Khan, A. A., Khan, U. A., & Ahmed, S. (2025). A Hybrid Dual-Axis Solar Tracking System: Combining Light-Sensing and Time-Based GPS for Optimal Energy Efficiency. Energies, 18(1), 217. https://doi.org/10.3390/en18010217