1. Introduction
Well physical location is very crucial as the key parameter in the success of a new well. However, the optimization of well placement is a very challenging task [
1,
2]. Reservoir engineers deal with a wide range of variables, such as geochemical variables [
3,
4,
5], production variables, monetary variables, etc. Moreover, the addition of reservoir uncertainties along with the variables has contributed to the limitations in determining the optimization of well placement.
Conventionally, a numerical multiphase flow simulator is the primary tool to define the optimum production strategy in complex fields. However, the optimization approach using a numerical multiphase flow simulator is time-consuming and requires tremendous manual trial and error. Furthermore, traditional gradient-based search algorithms such as line-search and trust-region strongly depend on the initial guessed solution as the size of the problem increases. The objective function (cumulative oil production) in well placement optimization will be on a high-dimensional and rough surface. Thus, the traditional gradient-based optimization methods were not relevant.
New alternatives and approaches [
6,
7] need to be developed to allow optimum reservoir performance gained from well placement, as many global-producing provinces are reaching maturity. Therefore, a general procedure for optimal deployment of wells by artificial intelligence methods such as genetic algorithms is introduced to automate this process. Genetic algorithms have been used widely in mathematical research, especially to solve complex optimization problems [
8,
9]. In petroleum engineering, it has been applied for reservoir development, such as well placement optimization.
Studies of well placement optimization using genetic algorithms (GAs) [
10,
11,
12] as optimization algorithms have been carried out by several researchers using a variety of methods. A methodology is developed to deploy high-deviation wells and horizontal wells [
13]. Their goal is to determine the most feasible good types, locations, and trajectories to access the highest productive zones of the reservoir. By numerically simulating several wells, they then order it based on GA criteria. The well placement for multiple horizontal and vertical wells can be optimized by using hybrid algorithms consisting of GAs and integrated with a numerical reservoir simulator [
14].
GAs are applied in automatic well placement estimation algorithms [
15]. They include oil displacement recovery factors as the cost function in their studies. They identified the grid blocks that satisfied potential production requirements and their petro-physical property constraints prior to generating all feasible production wells on the grid blocks. Then, they implemented definite optimization using GAs to eliminate many possible solutions. GAs are utilized in a hybrid optimization algorithm that includes a neural network accelerator algorithm in conjunction with a reservoir simulator [
16]. They optimized the well placements for vertical water injection for a water flood field project. GAs are used to optimize the locations of their vertical injector and producer wells [
17].
Genetic algorithms (GAs) have stochastic search algorithms that optimize as per the principle of natural selection from the Darwinian theory of evolution. They propose a population of solutions, selecting parameters from specified user constraints, evaluating them, and combining the fittest ones to generate better candidates. GAs were first attempted to solve complex problems in the seventies by biologists. The formulation of basic theory was carried out, whereby complex problems were represented as bit chains. It was studied that simple transformations can improve chains. A tiny fragment of the population is enough to find the optimized individual [
18]. This is because GA uses a probabilistic transition system that imitates the differential reproduction of individuals during the optimization [
19]. GAs are different compared to the traditional gradient-based algorithms because they compute the parameter code set rather than the parameters themselves. GAs are suited to handling discrete parameter values such as the number of wells. Meanwhile, ref. [
20] described that traditional methods are limited by the complexity and uncertainty of the oil field optimization problem. They search for a set of parameters instead of searching for the parameter itself. Further, instead of referring to the next individual as the solution for merging, they merge two already-fit individuals to produce another stronger one [
21]. All these differences cause GA to be able to surpass the traditional methods in terms of limitation, continuity, and derivability of the objective function.
The problem variables are represented in the form of chromosomes in this first step of GA structures. In other words, unknowns or parameters can be represented by each set of bits. Individual chromosomes are represented by the overall string. Here, every individual could be a potential solution to the optimization problem. The initial population is generated either randomly or intuitively to ensure suitable coverage of the population. The process of evolution starts by creating random individuals to form an initial population. The newly generated individuals are then inserted into the population randomly which then removes the less fitted individuals from the previous generation. The process of evolving the population from the current generation until the next one can be referred to as the number of iterations in the optimization [
22]. The stopping condition for the evolution is the maximum number of generations selected by the user.
The reproduction step is the most complicated step, with the highest number of variations. During the selection process, the fitter individuals are preferentially selected for reproduction. There are several approaches used to select the parent chromosomes. The first method is a deterministic method whereby the chromosomes chosen to mate are just per their order of ranking. On the other hand, the parent chromosomes are heuristically selected at random so that the fittest one has the highest probability of being reproduced. In this project, the rank-based selection criterion is used whereby the rank of the individual will determine the probability of the individual being selected in the population. Thus, the weaker individuals in the population have less probability of being selected and will not survive [
23]. In this step, parent chromosomes are selected to form a new generation. There are three processes used to create a new generation from the parent chromosomes: crossover (mating), mutation, and elitism.
Crossover is a binary reproduction operator that randomly selects an index on the chromosome string. The children’s chromosomes are created by taking the content of the string before the index from one parent and then combining it with the content of the string after the index of another parent [
23]. Therefore, children of higher fitness than their parents will have the potential to be formed. However, even though the probability of the crossover is normally close to 1, there is still a finite probability that the parents will remain unchanged into the next generation. In this project, crossover means considering new cases in the optimization process where part of the well of the initial chromosomes is mated with the next well of chromosomes. Montes et al. [
19] described that due to the random crossing point, the new chromosomes can be either a mix of injector wells from the first chromosome or producer wells from the second chromosome. Moreover, there could also be a few producers from the second chromosome and the rest from the first chromosome, and vice versa. The most crucial part of the crossing is that it could create new scenarios if a crossover of completely two different chromosomes occurred at their middle point.
Mutation is another operator of reproduction that can influence all genes in children and mutate them with a certain probability. A small allowance of mutation is allowed for new genetic material to be introduced. This is to consider that, in the case of reaching the stopping criterion or local maximum, the process can proceed to other local maximums if the mutation is happening. Mutation occurs either before crossover or after crossover. In this project, the mutation is just a small adjustment of parameters because only one of the randomly selected wells will have its position changed. Montes et al. [
19] again stated that crossing has a significant impact on the first evaluation when the population is still in the stage of heterogeneity. However, mutation has become more crucial when the chromosomes are close to reaching similarity.
This study while introducing a synthetic model for well optimization has the potency of guiding new petroleum field developers, operators, and reservoir engineers planning to maximize oil and gas well productivity. Understanding the importance of numerical modeling algorithms, this current study was influenced to present globally accepted models for simulating well placement distribution.
However, noticing the deficiency in gradient-based algorithm, the primary objective of the study was to introduce to non-programmers the steps involved to achieving an optimum well placement through genetic algorithm and propose possible algorithms that could be further integrated into CMG for heterogeneous reservoirs.
3. Results and Discussion
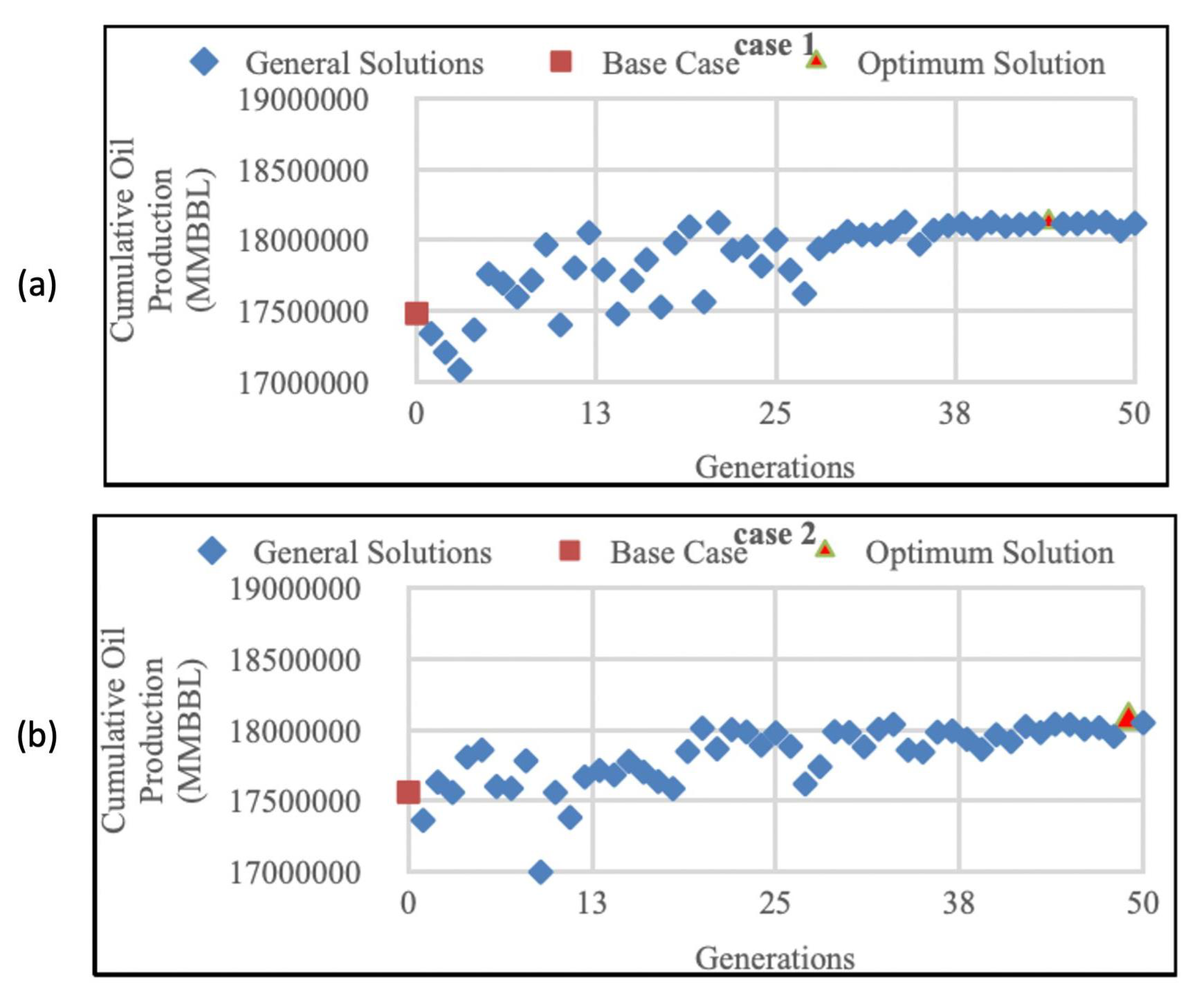
From the result obtained in
Figure 2a, the base case cumulative oil production for Case 1 was 17,484 MBBL, and it reached its optimum solution at the 44th generation with 18,130 MBBL of cumulative oil production. The cumulative oil production has increased by 3.6% compared to the initial cumulative oil production before optimization.
Figure 2b shows that Case 2 initially had 17,562 MBBL of cumulative oil production, which increased by 2.88% to the optimum value of 18,068 MBBL at the 49th generation.
However, the difference between the optimized value of Case 1 and 2 was only 0.81%. This indicates that the different initial well placement distribution did not have a significant impact on GA performance and the cumulative oil produced over 50 generations. The assumption for this result was because of GA’s stochastic nature of randomly searching for random solutions, and hence, the initial well placement distribution did not significantly have an impact on the cumulative oil produced.
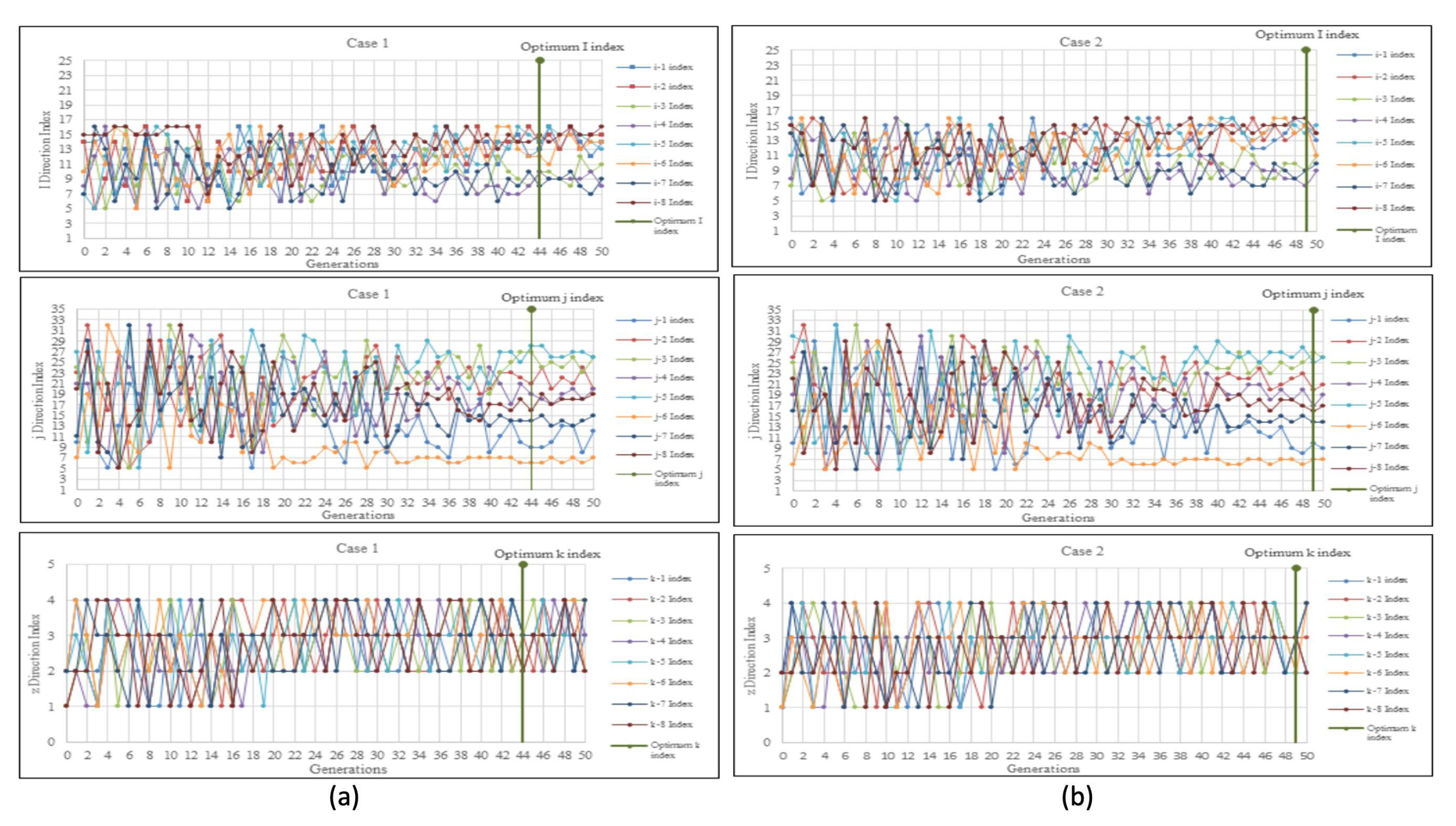
In Case 1,
Figure 3a (i) illustrates the optimization of the i-direction index for all 8 producers. The range of index values considered for optimization was between 5 and 16, in order to reduce the number of cells that needed evaluation. Initially, the i-direction indexes were dispersed randomly across the first 10 generations, ranging from a minimum of 5 indexes to a maximum of 16 indexes. However, as the generations progressed, these values gradually decreased. By the 40th generation, a more consistent pattern emerged, with the optimum i-direction indexes observed at the 44th generation, coinciding with the peak cumulative oil production.
In
Figure 3a (j), the optimization of the j-direction index for all 8 producers is depicted. Similarly, the index values for the j-direction were optimized within the range of 5 to 32, in order to limit the number of cells to be evaluated. In the initial 20 generations, the j-direction indexes were scattered randomly, with a minimum of 5 indexes and a maximum of 32 indexes involved. Gradually, the intervals of decrease became smaller as the generations progressed, peaking at the 50th generation. From the 42nd generation onward, there was a noticeable trend in the graph pattern, with the j indexes displaying greater consistency. The optimal j indexes were observed at the 44th generation, coinciding with the achievement of the optimal cumulative oil production.
In
Figure 3a (k), the optimization of the k-direction index for all eight producers in Case 1 is depicted. Since the synthetic reservoir model consisted of only four layers, the k-direction indexes for the eight producers were optimized within the range of indexes 1 to 4. Initially, in the first 20 generations, the graph showed a random scattering of k indexes, with a minimum of one and a maximum of four k-direction indexes. However, starting from the 20th generation, the graph pattern indicated a growing consistency in the k indexes. The optimal k indexes were achieved at the 44th generation, aligning with the attainment of the optimal cumulative oil production.
In Case 2,
Figure 3b (i) illustrates the optimization of the i-direction index for all eight producers. The range of optimization falls between index 5 and 16, effectively reducing the number of cells to be evaluated. Initially, the i-direction indexes were scattered randomly in the first 10 generations, ranging from a minimum of 5 to a maximum of 16. However, as the generations progressed up to a maximum of 50, these indexes gradually decreased at intervals. Notably, by the 40th generation, the graph pattern indicated a greater consistency in the I indexes, with the optimal indexes observed at the 49th generation coinciding with the optimal cumulative oil production.
Similarly,
Figure 3b (j) demonstrates the optimization of the j-direction index for all 8 producers in Case 2. The optimization range for the j-direction indexes spans from index 5 to 32, effectively limiting the number of cells to be evaluated. In the initial 20 generations, the j-direction indexes were scattered randomly, ranging from a minimum of 5 to a maximum of 32.
The generations saw a gradual decrease in intervals, with a maximum of 50 generations. At the 40th generation, the graph displayed a more consistent pattern for the j indexes, reaching optimal values at the 49th generation when the cumulative oil production was at its peak.
In
Figure 3b (k), the optimization of the k-direction index for all eight producers is depicted for Case 2. As the synthetic reservoir model consisted of only four layers, the k-direction indexes for the eight producers were optimized within the range of 1 to 4. Initially, the graph showed a random scattering of k indexes for the first 20 generations, ranging from a minimum of one to a maximum of four. However, starting from the 21st generation, the k indexes became more consistent, reaching their optimal values at the 49th generation when the cumulative oil production was at its peak.
In
Figure 4a, it was observed that Case 3 achieved the optimal solution after 74 generations, resulting in a cumulative oil production of 18,169 MBBL. This represents a 3.46% increase compared to the initial cumulative oil production before optimization.
Moving on to Case 4,
Figure 4b illustrated that the cumulative oil production increased by 3.63% to reach a value of 18,200 MBBL at the optimum point. This was achieved after 111 generations. Comparing Case 4 to Case 3, there was a slight improvement of 0.17%.
These findings suggest that increasing the number of potential well placement solutions leads to a greater genetic richness, which in turn increases the likelihood of converging towards the optimal cumulative oil production. However, it is important to note that a larger number of random solutions requires more iterations or generations, as seen in Cases 3 and 4. Specifically, Case 3 reached the optimum solution in just 74 generations, while Case 4 required 111 generations. In conclusion, employing a larger number of random solutions enhances the probability of reaching the optimal solution, albeit at the cost of additional generations. The optimized well placements for Cases 3 and 4 can be observed in
Figure 4a and
Figure 4b, respectively.
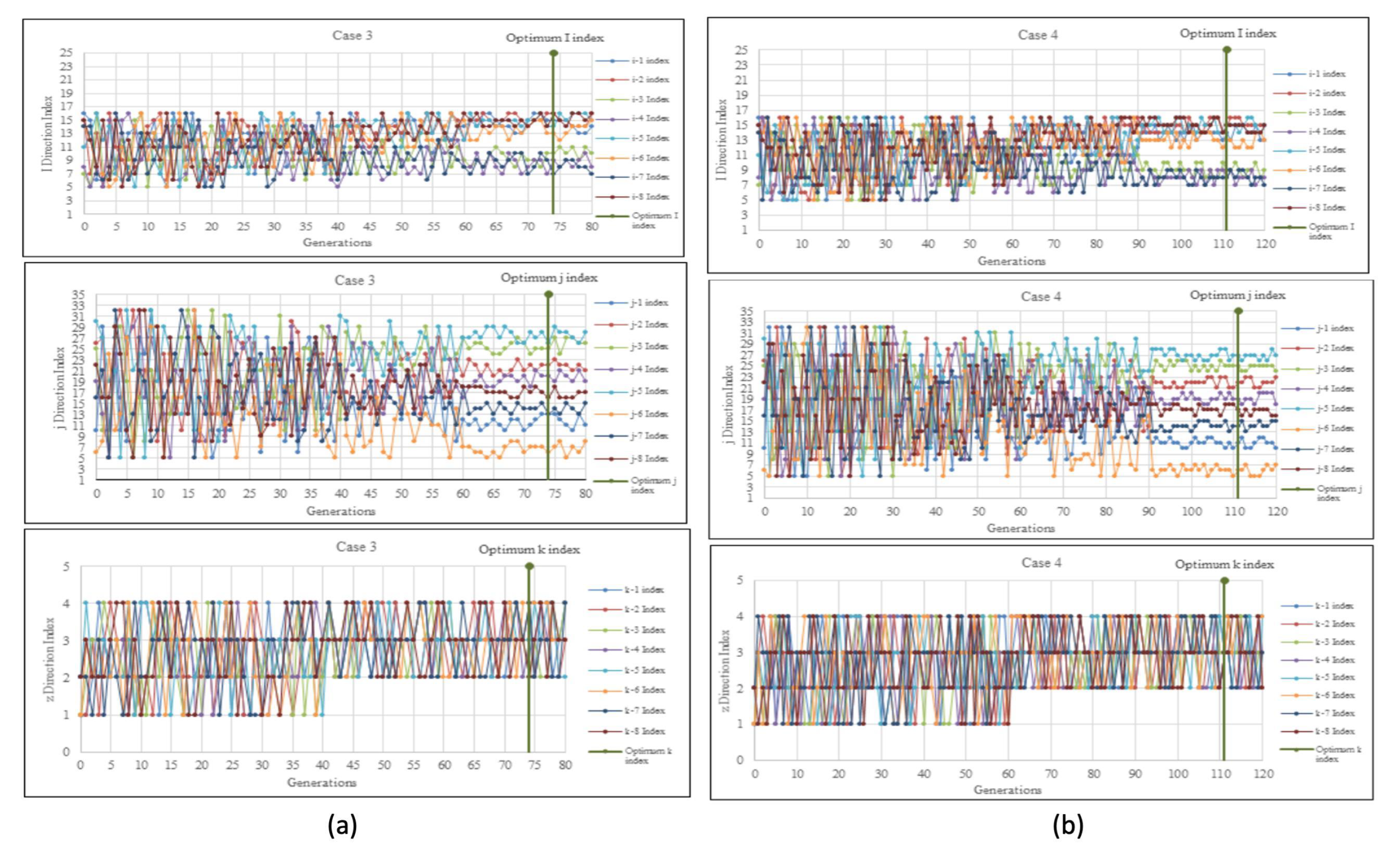
For Case 3, the optimization of each of the eight manufacturers’ i-direction index is displayed in
Figure 5a (i). To reduce the number of cells that need to be assessed, all eight producers’ i-direction indexes were optimized in the range between index 5 and index 16. The graph demonstrated how, over the first 22 generations, the direction I indexes were dispersed at random, with a minimum of 5 and a maximum of 16 i-direction indexes. Yet, they steadily dropped off as the generations increased to a maximum of 80. The graph pattern demonstrated that the I indexes started to become more consistent at generation 55. As the optimum cumulative oil production achieved an optimal solution, generation 74 saw the observation of the optimum I indexes.
The optimization of the j-direction index for Case 3 across all eight producers is displayed in
Figure 5a (j). To reduce the number of cells to be assessed, all eight manufacturers’ j-direction indexes were optimized between index 5 and index 32. With a minimum of 5 and a maximum of 32 j-direction indexes involved, the graph demonstrated how the direction j indexes were randomly dispersing throughout the first 20 generations. Nevertheless, when the generations increased to a maximum of 80, they progressively reduced at intervals. The j indexes started to become more consistent at the 60th generation, according to the graph pattern, and the optimum j indexes were found to be at the 74th generation when the optimum cumulative oil production achieved an optimal solution.
The optimization of each of the eight producers’ k-direction index for Case 3 is displayed in
Figure 5a (k). Since the artificial reservoir model was limited to four layers, all k-direction indexes for eight producers were optimized in the range between indexes 1 and 4. The graph demonstrated how, over the first 40 generations, the direction k indexes were randomly dispersed, with a minimum of one k-direction index and a maximum of four k-direction indexes. The graph pattern indicated that the k indexes started to become consistent at generation 41, and the optimum k indexes were found to be at generation 74 when the optimum cumulative oil production achieved an optimal solution.
Figure 5b (i) shows the optimization of the i-direction index of all eight producers for Case 4. All i-direction indexes for eight producers were optimized in the interval between index 5 to 16 to limit the number of cells to be evaluated. The graph shows that the direction I indexes were scattered randomly in the first 50 generations with a minimum of 5 i-direction indexes and a maximum of 16 i-direction indexes. Still, they gradually decreased in intervals as the generations reached a maximum generation of 120. Starting at the 80th generation, the graph pattern showed that the I indexes began to be more consistent, and the optimum I indexes were observed to be at the 111th generation as the optimum cumulative oil production reached an optimal solution.
Figure 5b (j) shows the optimization of the j-direction index of all eight producers for Case 4. All j-direction indexes for eight producers were optimized in the interval of between index 5 to 32 to limit the number of cells to be evaluated. The graph showed the direction j indexes were scattering randomly in the first 30 generations with a minimum of 5 j-direction indexes and a maximum of 32 j-direction indexes. Still, they gradually decreased in intervals as the generations reached a maximum generation of 120. Starting at the 90th generation, the graph pattern showed that the j indexes began to be more consistent, and the optimum j indexes were observed to be at the 111th generation as the optimum cumulative oil production reached an optimal solution.
Figure 5b (k) shows the optimization of the k-direction index of all eight producers for Case 4. All k-direction indexes for eight producers were optimized in the interval between indexes 1 to 4 because the synthetic reservoir model was only a four-layered model. The graph shows that the direction k indexes were scattering randomly in the first 60 generations with a minimum of one k-direction index and a maximum of four k-direction indexes. Starting at the 61st generation, the graph pattern showed that the k indexes began to be consistent and the optimum k indexes were observed to be at the 111th generation as the optimum cumulative oil production reached an optimal solution.
From the result obtained in
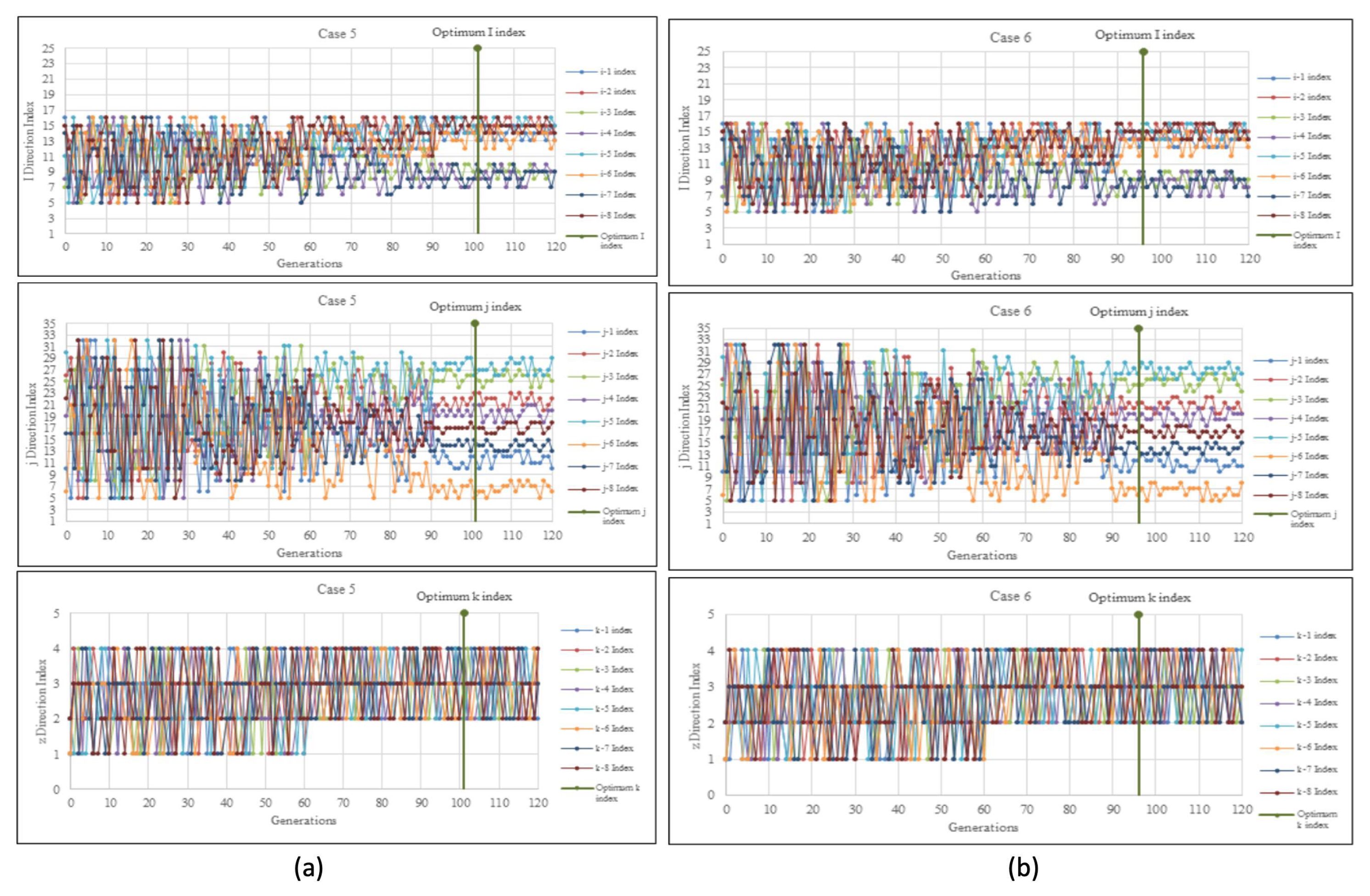
Figure 6a, Case 5 reached the optimum solution at the 101st generation with 18,189 MBBL of cumulative oil production. The cumulative oil production has increased by 3.57% compared to the initial cumulative oil production before optimization. For Case 6, cumulative oil production increased also by 3.57% at an optimum value of 18,188 MBBL with 96 generations, as shown in
Figure 6b.
The findings demonstrated that despite using various crossover rates, Cases 5 and 6 did not differ significantly in terms of the total amount of oil produced. According to theory, a higher crossover rate causes generations or iterations to continue, increasing the likelihood that they will converge to global optima. Even still, Case 6’s 0.9 crossover rate resulted in less cumulative oil production than Case 4’s 0.8 crossover rate.
Figure 6a,b display the optimized well placement that was achieved for Cases 5 and 6.
Figure 7a (i) shows the optimization of the i-direction index of all eight producers for Case 5. All i-direction indexes for eight producers were optimized in the interval between index 5 and 16 to limit the number of cells to be evaluated. The graph shows that the direction I indexes were scattered randomly in the first 40 generations with a minimum of 5 i-direction indexes and a maximum of 16 i-direction indexes. Still, they gradually decreased in intervals as the generations reached a maximum generation of 120. Starting at the 90th generation, the graph pattern showed that the I indexes began to be more consistent, and the optimum I indexes were observed to be at the 101st generation as the optimum cumulative oil production reached an optimal solution.
Figure 7a (j) shows the optimization of the j-direction index of all eight producers for Case 5. All j-direction indexes for eight producers were optimized in the interval between index 5 and 32 to limit the number of cells to be evaluated. The graph shows that the direction j indexes were scattering randomly in the first 30 generations, with a minimum of 5 j-direction indexes and a maximum of 32 j-direction indexes. Still, they gradually decreased in intervals as the generations reached a maximum generation of 120. Starting at the 90th generation, the graph pattern showed that the j indexes began to be more consistent, and the optimum j indexes were observed to be at the 101st generation as the optimum cumulative oil production reached an optimal solution.
Figure 7a (k) shows the optimization of the k-direction index of all eight producers for Case 5. All k-direction indexes for eight producers were optimized in the interval between indexes 1 and 4 because the synthetic reservoir model was only a four-layered model. The graph shows that the direction k indexes were scattering randomly in the first 60 generations, with a minimum of one k-direction index and a maximum of four k-direction index involved. Starting at the 61st generation, the graph pattern shows that the k indexes began to be consistent, and the optimum k indexes were observed to be at the 101st generation as the optimum cumulative oil production reached an optimal solution.
Figure 7b (i) shows the optimization of the i-direction index of all eight producers for Case 6. All i-direction indexes for eight producers were optimized in the interval between index 5 to 16 to limit the number of cells to be evaluated. The graph shows that the direction I indexes were scattered randomly in the first 50 generations, with a minimum of 5 i-direction indexes and a maximum of 16 i-direction indexes. Still, they gradually decreased in the interval as the generations reached a maximum generation of 120. Starting at the 90th generation, the graph pattern showed that the I indexes began to be more consistent, and the optimum I indexes were observed to be at the 96th generation as the optimum cumulative oil production reached an optimal solution.
Figure 7b (j) shows the optimization of the j-direction index of all eight producers for Case 6. All j-direction indexes for eight producers were optimized in the interval between index 5 and 32 to limit the number of cells to be evaluated. The graph showed the direction j indexes were scattering randomly in the first 30 generations, with a minimum of 5 j-direction indexes and a maximum of 32 j-direction indexes. Still, they gradually decreased in intervals as the generations reached a maximum generation of 120. Starting at the 90th generation, the graph pattern showed that the j indexes began to be more consistent, and the optimum j indexes were observed to be at the 96th generation as the optimum cumulative oil production reached an optimal solution.
Figure 7b (k) shows the optimization of the k-direction index of all eight producers for Case 6. All k-direction indexes for eight producers were optimized in the interval between indexes 1 and 4 because the synthetic reservoir model was only a four-layered model. The graph shows that the direction k indexes were scattering randomly in the first 60 generations, with a minimum of one k-direction index and a maximum of four k-direction index involved. Starting at the 61st generation, the graph pattern showed that the k indexes began to be consistent, and the optimum k indexes were observed to be at the 96th generation as the optimum cumulative oil production reached an optimal solution.
In light of the expounded methods for GA application in well placement, a comparative analysis is discussed even from a wider field of research, Zingg et al. [
24] made an emphatic claim that GA and GB algorithms are most synonymous and reliable when converging under several aerodynamic shape optimization problems. That being said Ahmad et al. [
25] object to the convergence similarities when it comes to comparing GA and GB with a benchmark of a cancer and diabetes dataset trained from artificial neural network architecture. However, when it comes to the GA algorithm, we noticed from our simulation, as shown in
Table 1, that the best optimum solution came from case 4 with the 111st generation, which clearly indicates that for a higher generation with an effective base, you will obtain the optimum production solution.
Despite the above solutions,
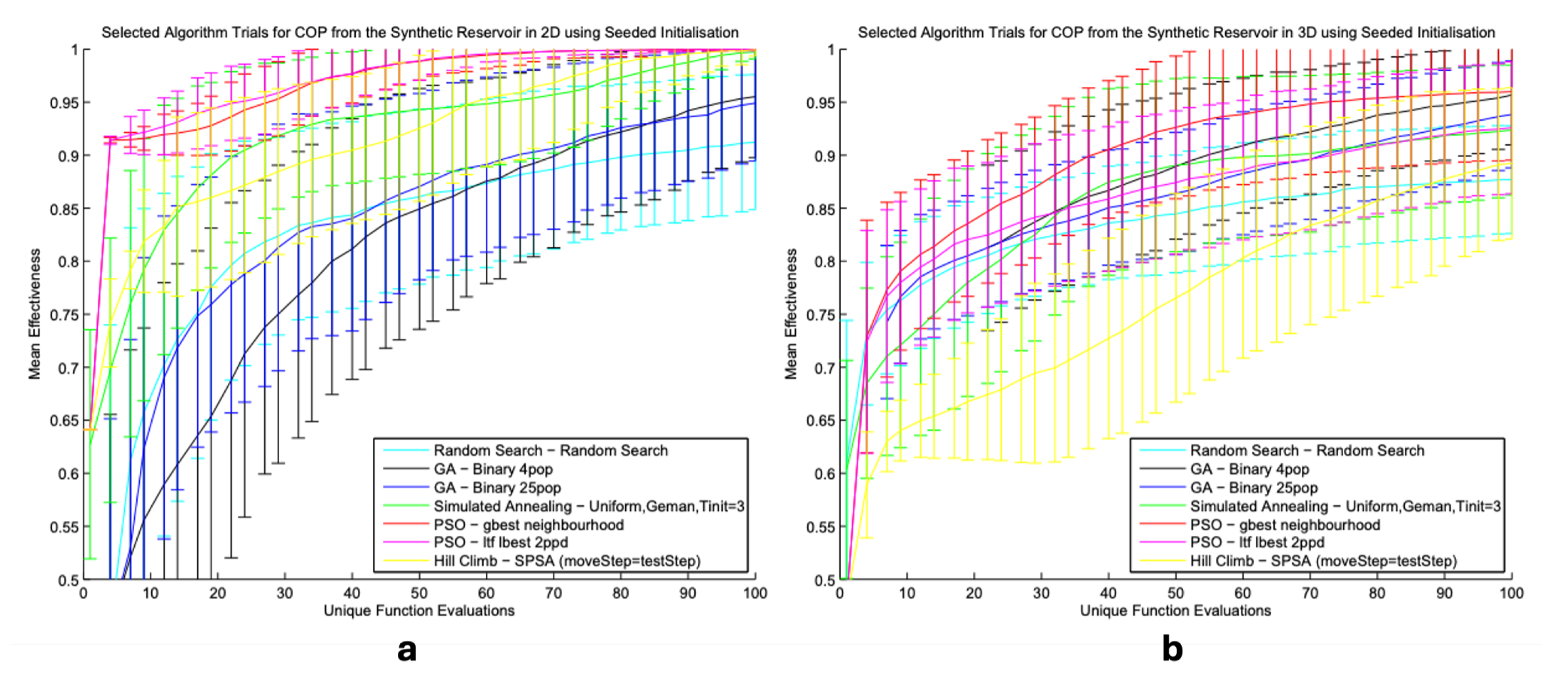
Figure 8 provides a comparative analysis of GA and PSO work conducted by Minton and Archer [
26]. Their work iterated that the performance of PSO was considered better than all other algorithms tested. However, they recommended the use of objective function approximations when initializing seeding which should be further exploited. The combination of particle swarm and simulated annealing could be in a sequential manner for better optimization.
Though this study has pronounced a GA with a benchmark reservoir dataset from the IMEX simulator as the best performing algorithm for well placement, we agree with Minton and Archer to further explore the use of improved PSO algorithms and the integration of the same CMG modeling tool.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}