
Application and Verification of a Leg-Transfer Method for Three-Level Active Neutral-Point-Clamped Inverters for Railway Vehicles


Abstract
1. Introduction
2. Analysis of Three-Level ANPC Inverter Structures and the Proposed Leg-Transfer Switch Method
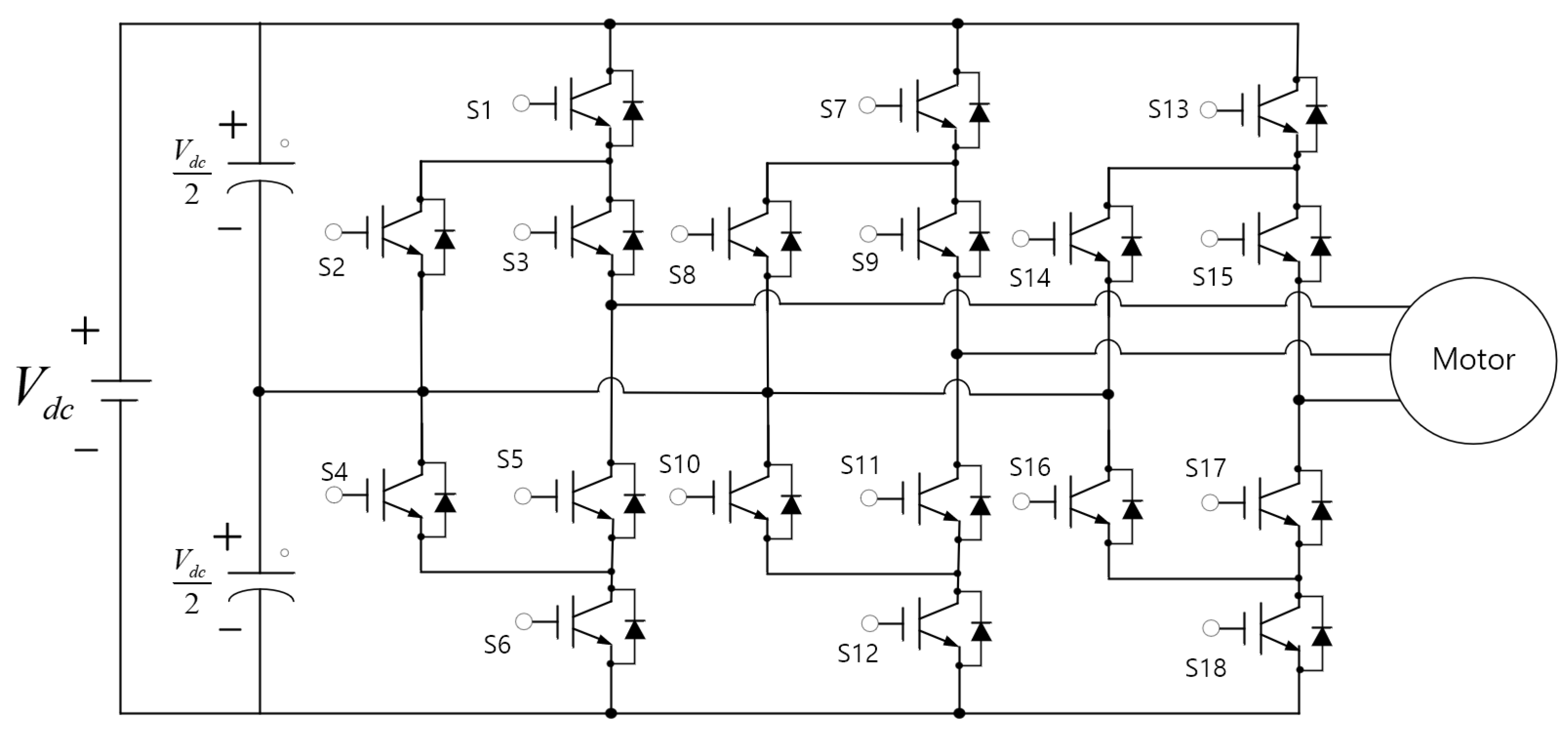
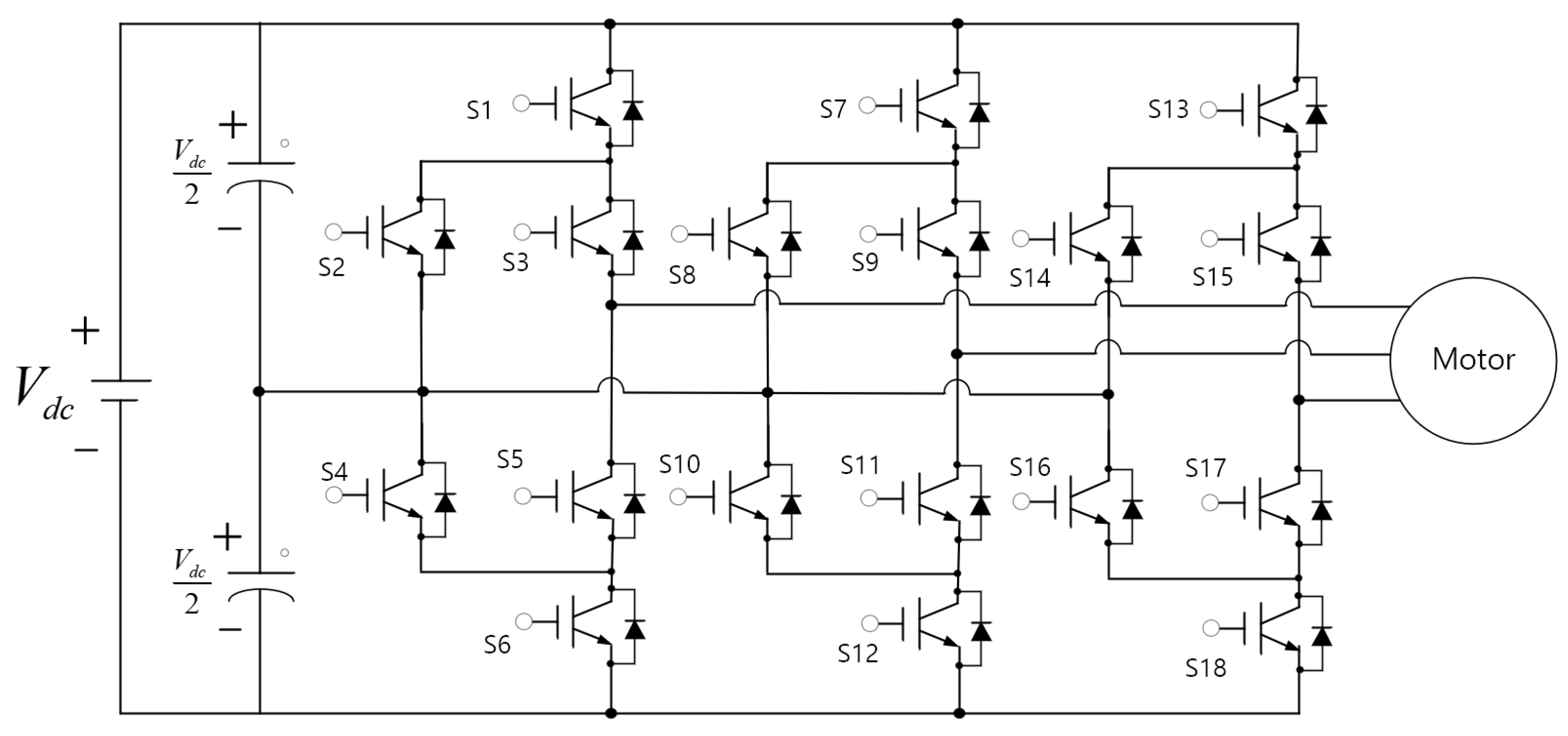
2.1. Analysis the Structure of a Three-Level ANPC Inverter
2.2. Limitations of Tolerance Control in Three-Level ANPC Inverters
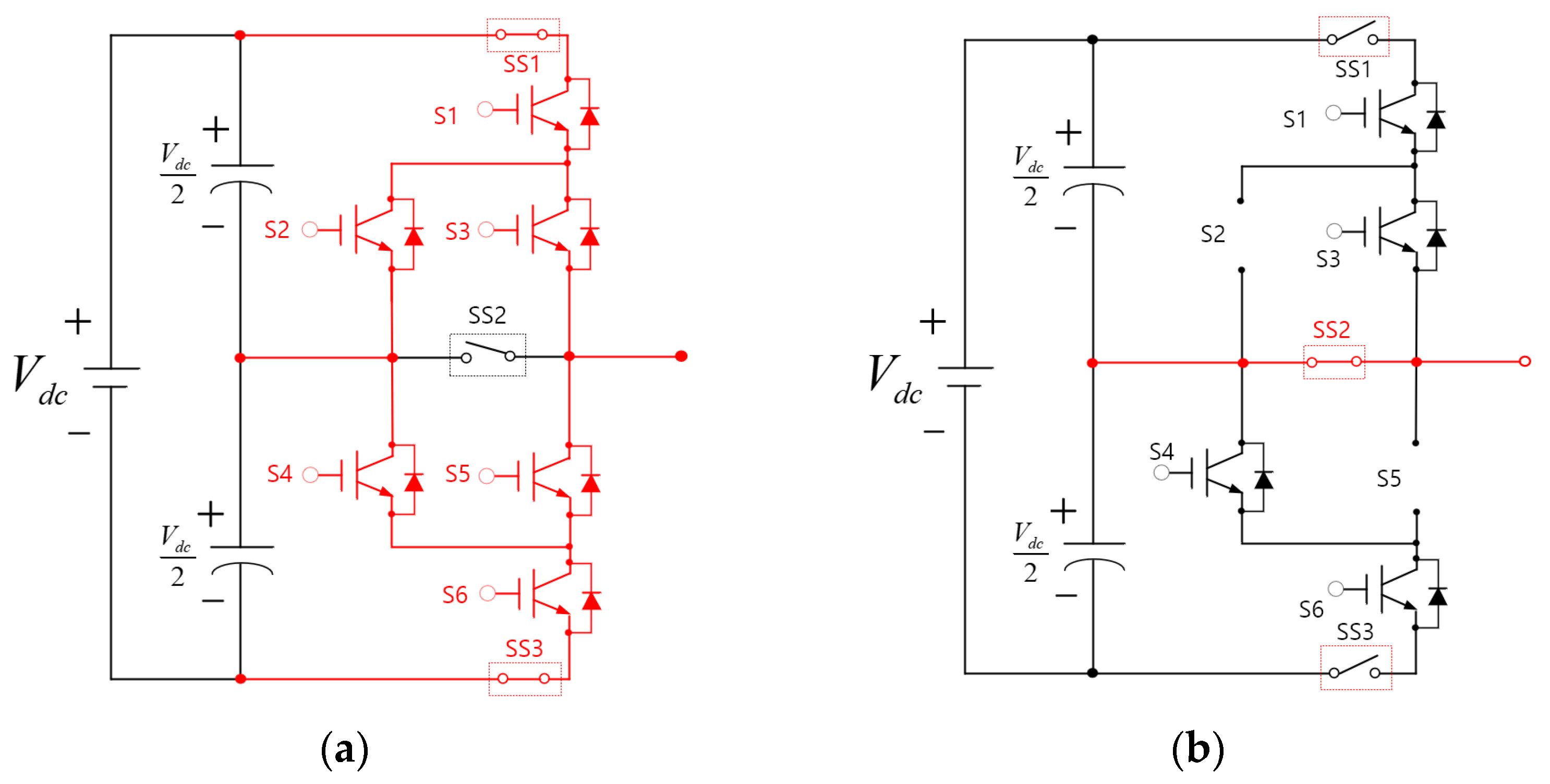
2.3. Analysis of the Tolerance Control Method by Leg Transfer in the Case of Fault Occurrence in a Three-Level ANPC Inverter
3. Simulation and Experimental Verification According to the Application of theLeg-Transfer Switch Method in a Three-Level ANPC Inverter
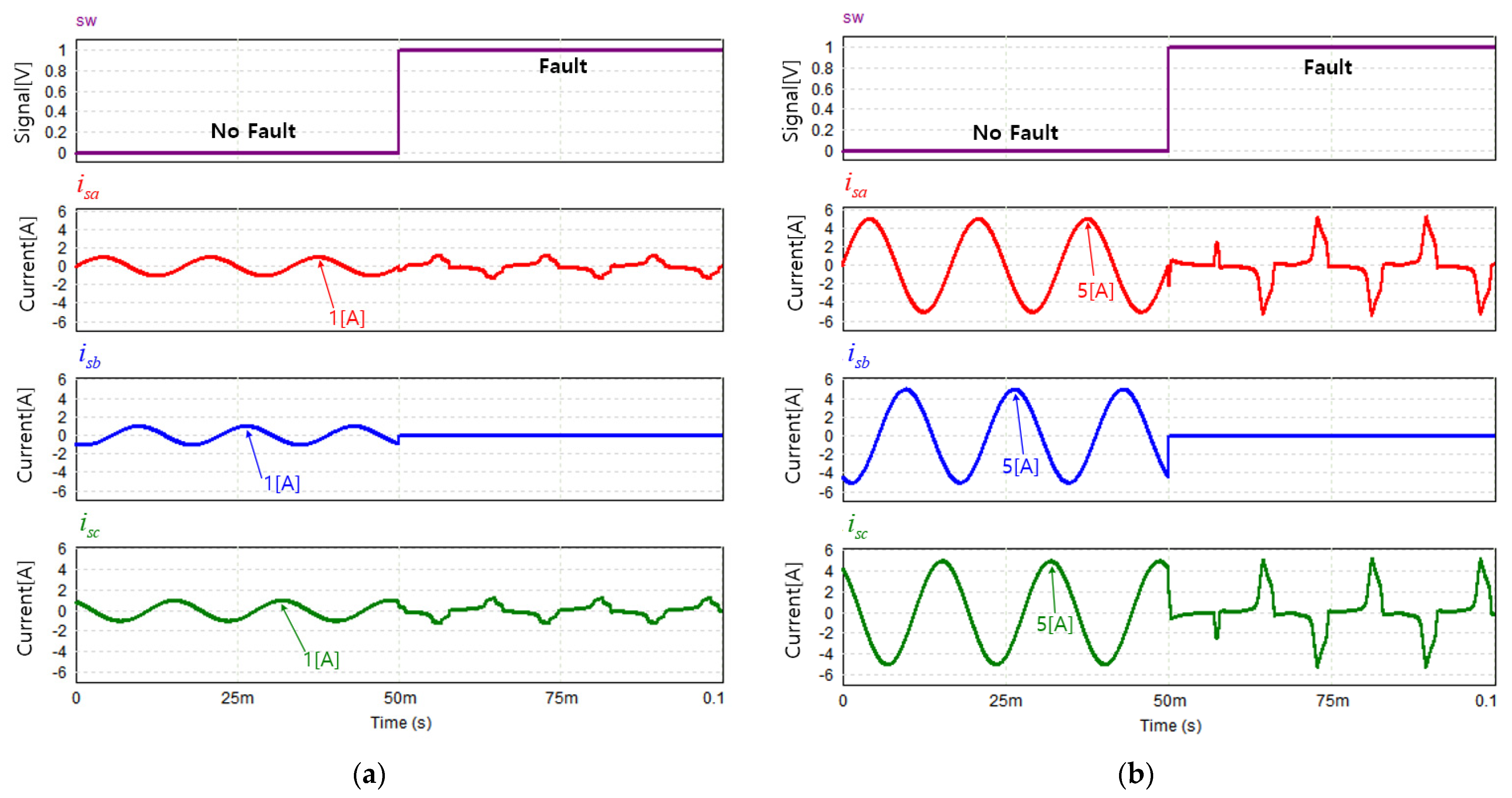
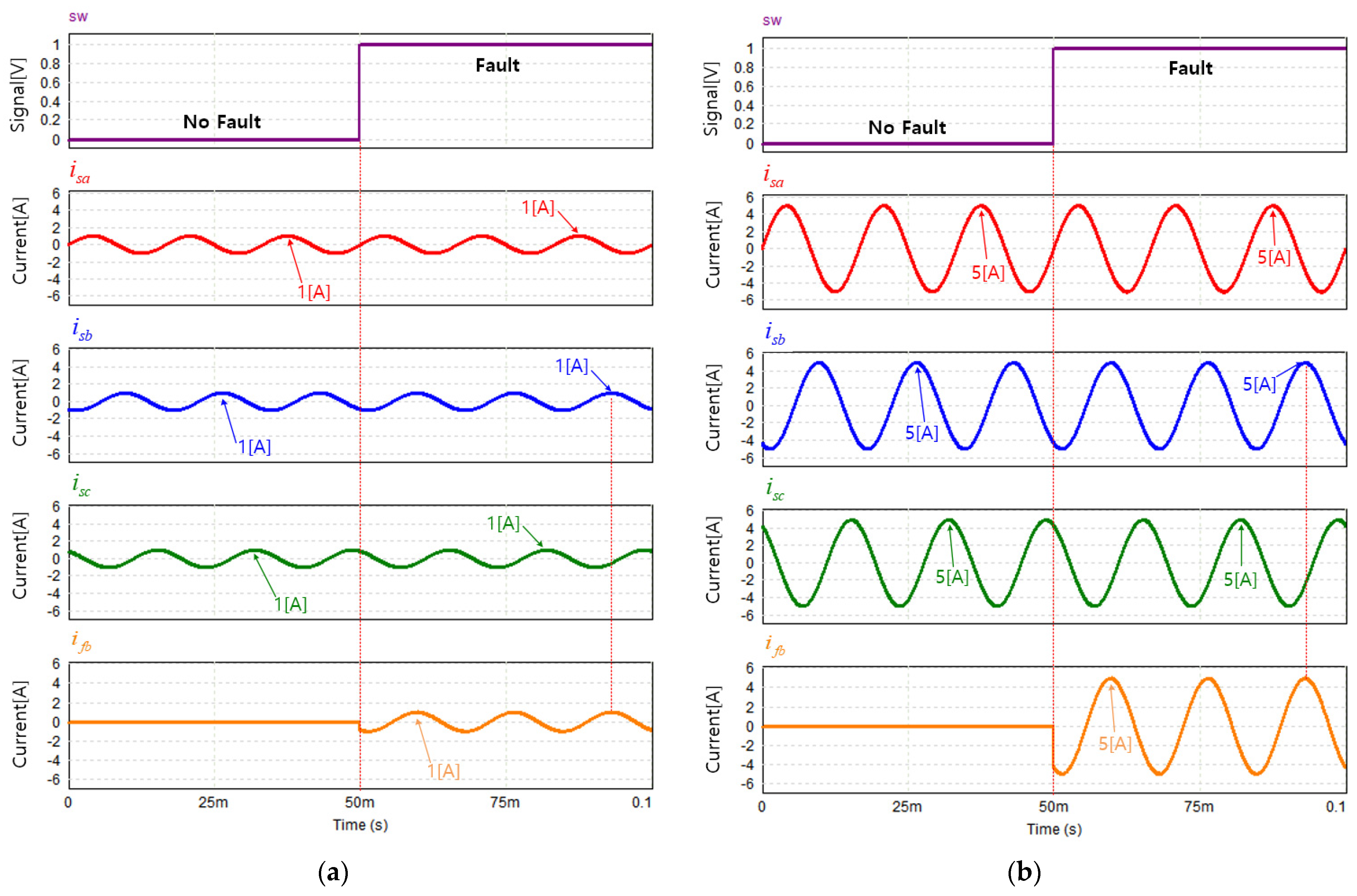
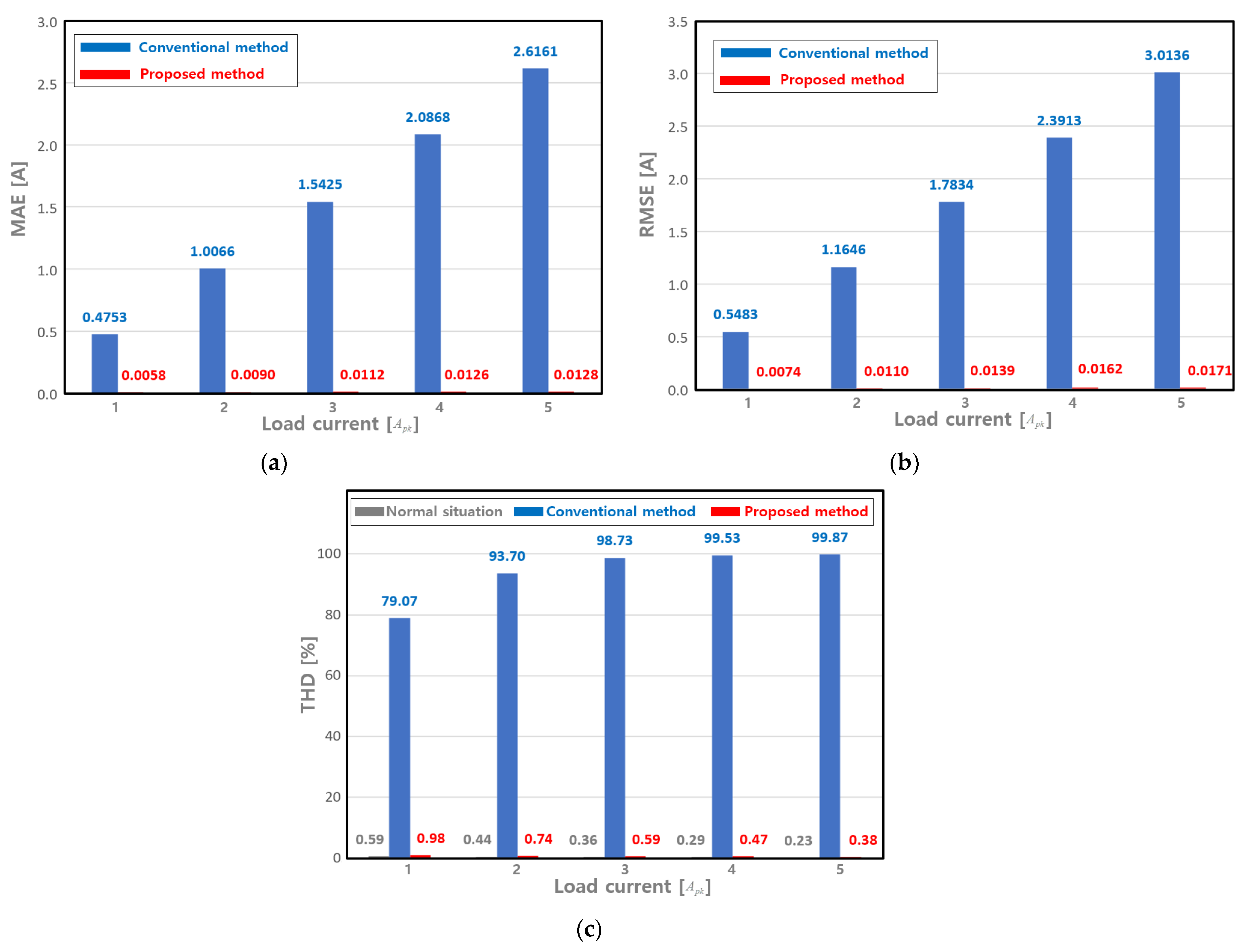
3.1. Verification of the Effect of the Leg-Transfer Switch Method through Simulations
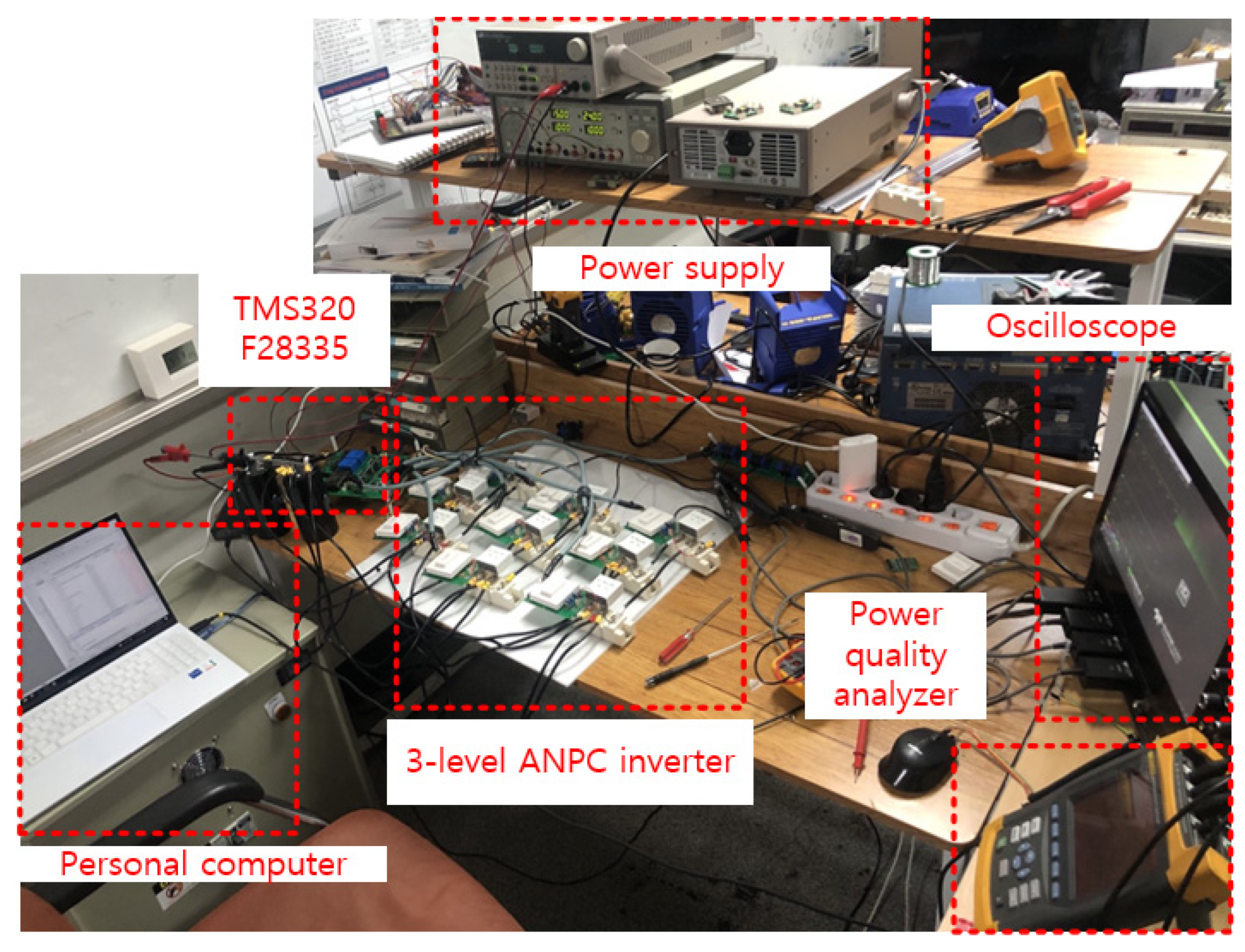
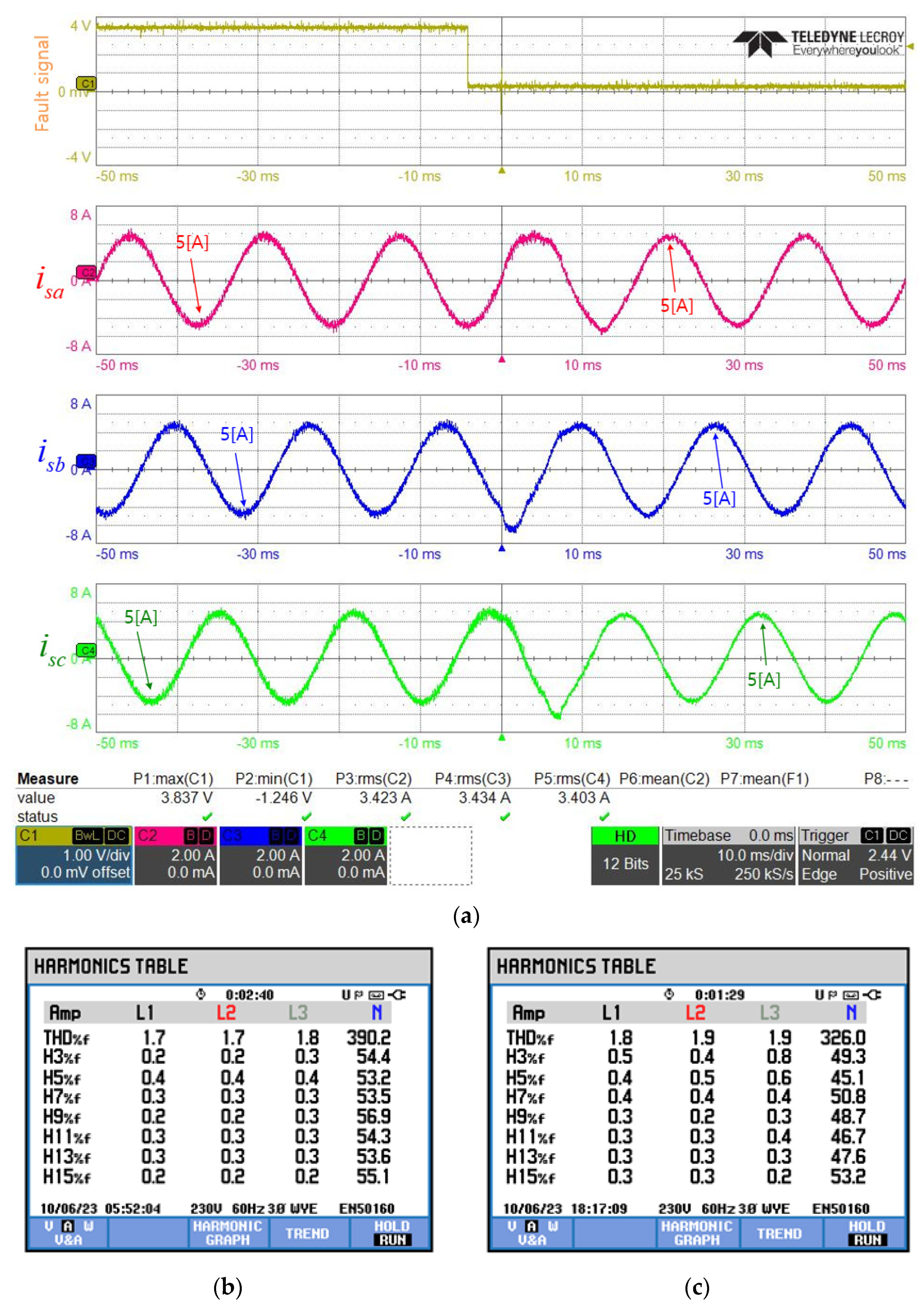
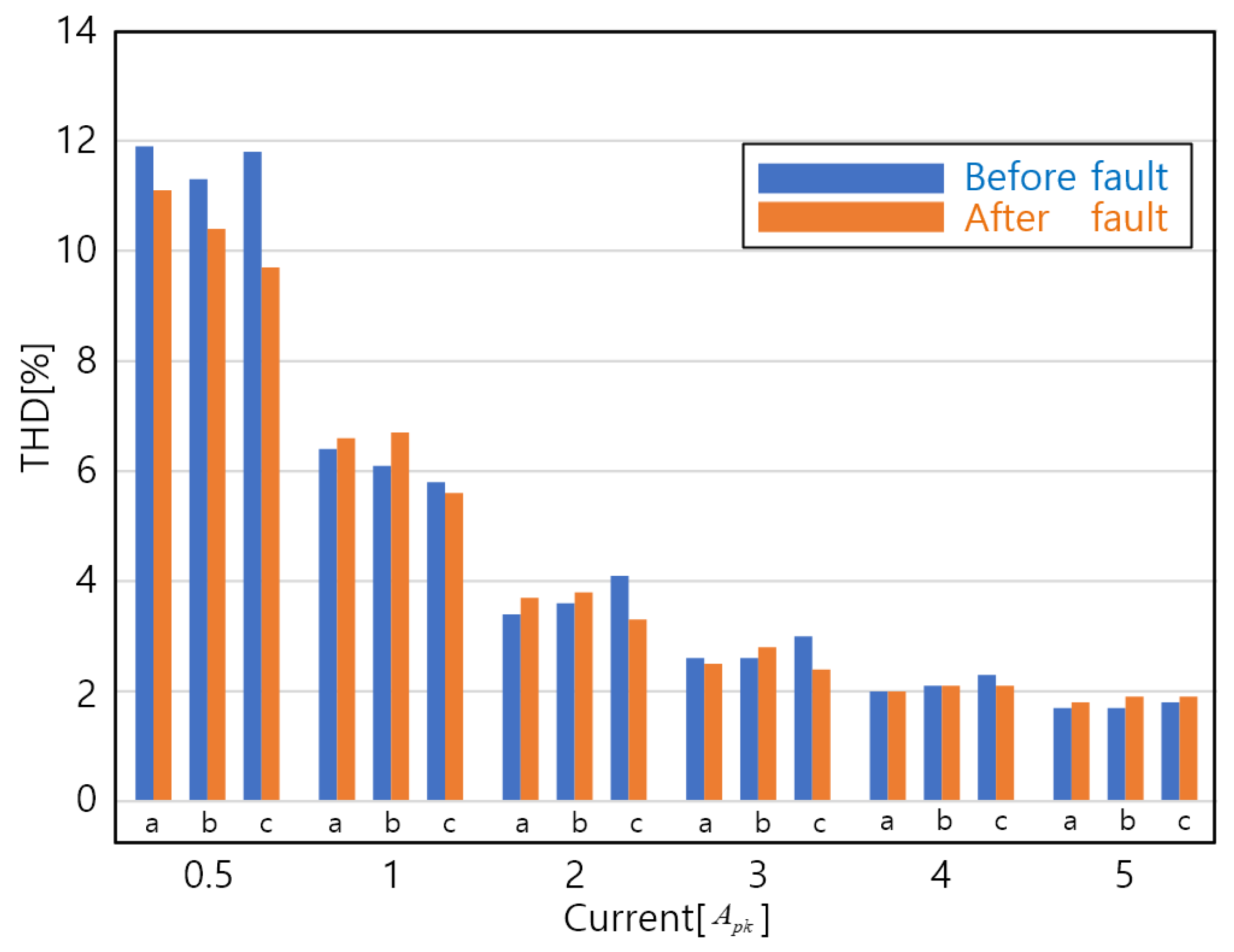
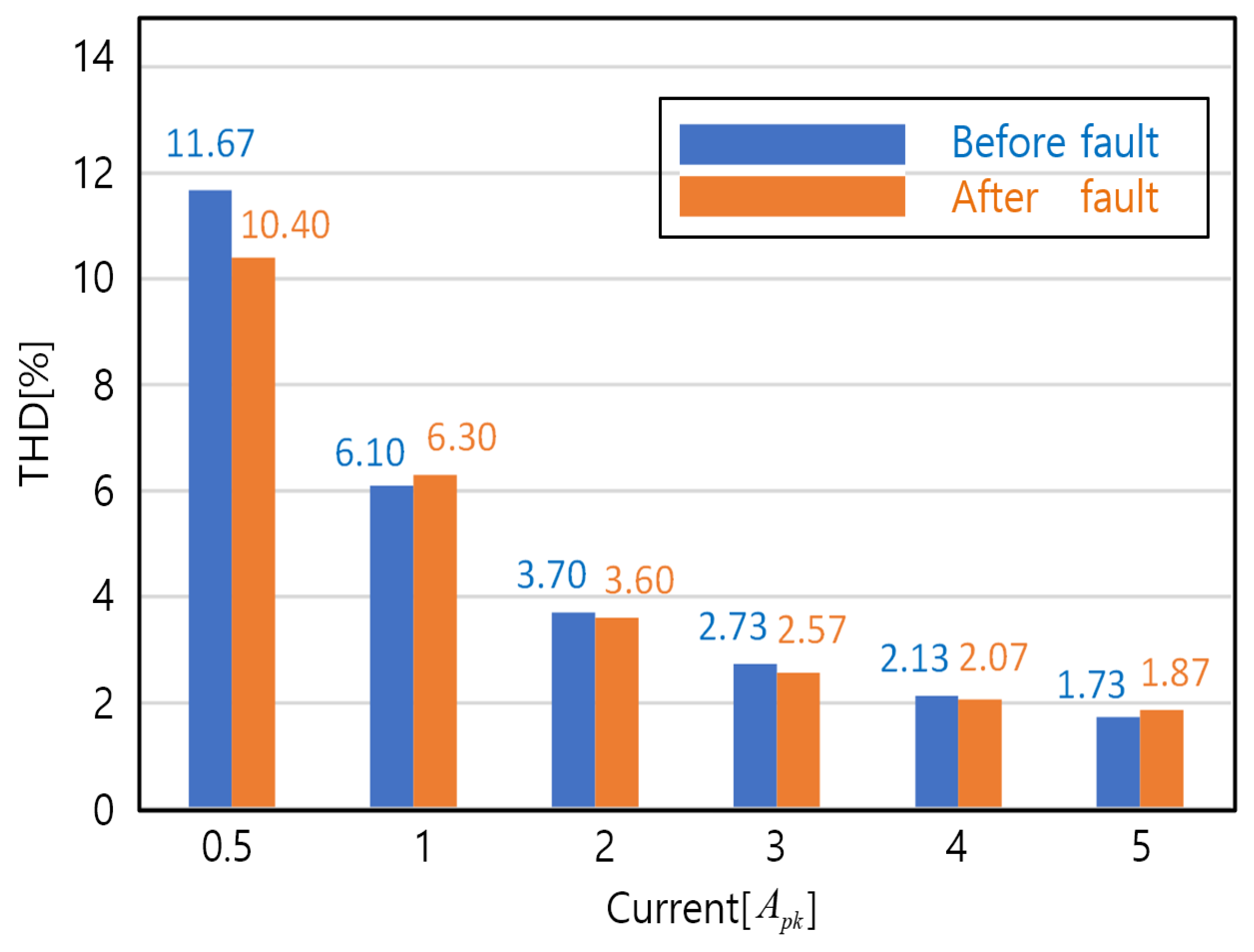
3.2. Verification of the Effect of the Leg-Transfer Switch Method through Experiments
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sustainable Development Solutions Network. America’s Zero Carbon Action Plan; Sustainable Development Solutions Network: New York, NY, USA, 2020; p. 27. [Google Scholar]
- The Government of the Republic of Korea. 2050 Carbon Neutral Strategy of the Republic of Korea Towards a Sustainable and Green Society; The Government of the Republic of Korea: Seoul, Republic of Korea, 2020; pp. 16–17.
- Yao, M.; Qin, D.; Zhou, X.; Zhan, S.; Zeng, Y. Integrated optimal control of transmission ratio and power split ratio for a CVT-based plug-in hybrid electric vehicle. Mech. Mach. Theory 2019, 136, 52–71. [Google Scholar] [CrossRef]
- Hasoun, M.; Afia, A.E.; Chikh, K.; Khafallah, M.; Benkirane, K. A PWM Strategy for Dual Three-Phase PMSM Using 12-Sector Vector Space Decomposition for Electric Ship Propulsion. In Proceedings of the 19th IEEE MELECON, Marrakech, Morocco, 2–7 May 2018; pp. 243–248. [Google Scholar] [CrossRef]
- Sieklucki, G. Optimization of Powertrain in EV. Energies 2021, 14, 725. [Google Scholar] [CrossRef]
- Hu, X.; Martinez, C.M.; Yang, Y. Charging, power management, and battery degradation mitigation in plug-in hybrid electric vehicles: A unified cost-optimal approach. Mech. Syst. Signal Process. 2017, 87, 4–16. [Google Scholar] [CrossRef]
- Hasoun, M.; EI Afia, A.; Chikh, K.; Khafallah, M. Field Oriented Control of Dual Three-Phase PMSM Based Vector Space Decomposition for Electric Ship Propulsion. In Proceedings of the IEEE ICCSRE, Agadir, Morocco, 22–24 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jeong, M.T.; Lee, K.B.; Pyo, H.Y.; Nam, D.W.; Kim, W.H. A Study on the Shape of the Rotor to Improve the Performance of the Spoke-Type Permanent Magnet Synchronous Motor. Energies 2021, 14, 3785. [Google Scholar] [CrossRef]
- Pillay, P.; Knshnan, R. Modeling of Permanent Magnet Motor Drives. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef]
- Tong, W.; Dai, S.; Wu, S.; Tang, R. Performance Comparison Between an Amorphous Metal PMSM and a Silicon Steel PMSM. IEEE Trans. Magn. 2019, 55, 8102705. [Google Scholar] [CrossRef]
- Lee, J.S.; Choi, U.M. Velocity Profile-Based Evaluation and Improvement of Lifetime of Power Devices in Railway PropulsionInverters. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1384–1394. [Google Scholar] [CrossRef]
- Phurahong, T. Design of 2-Leg Inverter for Controlling of a Single Phase Induction Motor. In Proceedings of the 2020 3rd International Conference on Power and Energy Applications (ICPEA), Busan, Republic of Korea, 24–26 April 2020; pp. 117–120. [Google Scholar]
- Chikate, V.D.; Fadnis, A.Y.; Gondhalekar, G.C. Control of 2-Ph. Induction Motor Using 2-Leg Inverter. In Proceedings of the 2018 International Conference on Smart Electric Drives and Power System (ICSEDPS), Maharashtra, India, 12–13 June 2018; pp. 369–374. [Google Scholar]
- Jacobina, C.B.; De Rossiter Correa, M.B.; Da Silva, E.R.C.; Lima, A.M.N. Induction motor drive system for low-power applications. IEEE Trans. Ind. Appl. 1999, 35, 52–61. [Google Scholar] [CrossRef]
- Jabbar, M.A.; Khambadkone, A.M.; Zhang, Y. DSP based space vector PWM drive for constant power operation of two-phase induction motors. In Proceedings of the IECON’01. 27th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 37243), Denver, CO, USA, 29 November–2 December 2001; Volume 2, pp. 1166–1171. [Google Scholar]
- Liu, Q.-Z. A Control Concept of SVM for Two Legs Inverters. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 318–321. [Google Scholar]
- Blaabjerg, F.; Neacsu, D.O.; Pedersen, J.K. Adaptive SVM to compensate DC-link voltage ripple for four-switch three-phase voltage-source inverters. IEEE Trans Power Electron. 1999, 14, 743–752. [Google Scholar] [CrossRef]
- Do, D.T.; Tran, V.T.; Nguyen, M.K.; Naik, S.M. Fault Tolerant Control Methods for Three-Level Boost T-Type Inverter. IEEE Trans. Ind. Electron. 2023, 70, 5463–5473. [Google Scholar] [CrossRef]
- Chao, K.H.; Ke, C.H. Fault Diagnosis and Tolerant Control of Three-Level Neutral-Point Clamped Inverters in Motor Drives. Energies 2020, 13, 6302. [Google Scholar] [CrossRef]
- Wang, M.Z.; Sun, D.; Zheng, Z.H.; Nian, H. A Novel Lookup Table Based Direct Torque Control for OW-PMSM Drives. IEEE Trans. Ind. Electron. 2021, 68, 10316–10320. [Google Scholar] [CrossRef]
- Manzolini, V.; Rù, D.D.; Bolognani, S. An Effective Flux Weakening Control of a SyRM Drive Including MTPV Operation. IEEE Trans. Ind. Appl. 2019, 55, 2700–2709. [Google Scholar] [CrossRef]
- Kim, S.H.; Sul, S.K. Maximum Torque Control of an Induction Machine in the Field Weakening Region. IEEE Trans. Ind. Appl. 1995, 31, 787–794. [Google Scholar] [CrossRef]
- Ye, M.T.; Shi, T.N.; Wang, H.M.; Li, X.M.; Xia, C.L. Sensorless-MTPA Control of Permanent Magnet Synchronous Motor Based on an Adaptive Sliding Mode Observer. Energies 2019, 12, 3773. [Google Scholar] [CrossRef]
- Lee, D.Y.; Lee, J.H. Compensation of Interpolation Error for Look-Up Table-Based PMSM Control Method in Maximum Power Control. Energies 2021, 14, 5526. [Google Scholar] [CrossRef]
- Xu, X.; Novotny, D.W. Selecting the flux reference for induction machine drives in the field weakening region. IEEE Trans. Ind. Appl. 1992, 28, 1353–1358. [Google Scholar] [CrossRef]
- Lee, J.; Park, K.; Cho, J.; Kim, J.; Son, S. Novel monitoring system, for low-voltage DC distribution network using deep-learning-based disaggregation. IEEE Access 2020, 8, 185266–185275. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| [] | 400 | |
| [] | 4700 | |
| [] | 28.14 | |
| [] | 15 | |
| Fault switch | [] | S8, S11 |
| Switching frequency | [] | 20 |
| Parameter | Unit | Value |
|---|---|---|
| ] | 400 | |
| ] | 4700 | |
| ] | 28.14 | |
| ] | 15 | |
| Switching frequency | ] | 20 |
| IGBT | [-] | SKM150GB12T4 |
| Gate driver | [-] | SKHI22BH4R |
| MCU | [-] | TMS320F28335 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Kim, G.; Shon, J. Application and Verification of a Leg-Transfer Method for Three-Level Active Neutral-Point-Clamped Inverters for Railway Vehicles. Energies 2024, 17, 1967. https://doi.org/10.3390/en17081967
Lee H, Kim G, Shon J. Application and Verification of a Leg-Transfer Method for Three-Level Active Neutral-Point-Clamped Inverters for Railway Vehicles. Energies. 2024; 17(8):1967. https://doi.org/10.3390/en17081967
Chicago/Turabian StyleLee, Hyunjae, Gildong Kim, and Jingeun Shon. 2024. "Application and Verification of a Leg-Transfer Method for Three-Level Active Neutral-Point-Clamped Inverters for Railway Vehicles" Energies 17, no. 8: 1967. https://doi.org/10.3390/en17081967
APA StyleLee, H., Kim, G., & Shon, J. (2024). Application and Verification of a Leg-Transfer Method for Three-Level Active Neutral-Point-Clamped Inverters for Railway Vehicles. Energies, 17(8), 1967. https://doi.org/10.3390/en17081967