
Power System Transient Stability Preventive Control via Aptenodytes Forsteri Optimization with an Improved Transient Stability Assessment Model


Abstract
1. Introduction
- The traditional TSC-OPF issue incorporated with differential-algebraic equations (DAE) is time consumption and difficult to solve.
- Due to the simplicity of the machine learning model’s structure, the accuracy of TSA models is insufficient. The common deep learning approach has three drawbacks: it only has one input feature set, it is difficult to choose structures, and its assessment results’ dependability is unknown.
- When TSA is directly introduced into the OPF as a constraint, the issue of lack of prior knowledge will arise. As a result, features that have little effect are frequently added as input features to the optimization process, which lowers the efficiency of optimization.
- Widely used optimization algorithms often have only one optimization path. This can lead to algorithms that are not fast enough to solve, and the accuracy of the results needs to be improved.
- In this paper, an ensemble learning model is used as a TSA model to solve the DAE equation, which simplifies the calculation and improves the efficiency.
- The stacking ensemble multilayer perceptron (SEMLP) approach is introduced to determine the transient stability of the system. The two-layer integrated model is designed in this paper to extract valuable information from diverse system operational features, thereby enhancing the overall model’s generalizability and accuracy. Based on this method, an online TSA model is developed and serves to determine the transient stability for TSPC.
- Sensitivity analysis based on TSA is used to determine the adjusting direction of the controllable generator set. The results of the sensitivity analysis are input as a priori knowledge into the subsequent optimization algorithm to improve the efficiency of the optimization algorithm.
- A novel TSPC method, AFO driven by SEMLP, is introduced to achieve a good balance between stability, economy, and rapidity in generation rescheduling.
2. Transient Stability Assessment Model Based on SEMLP
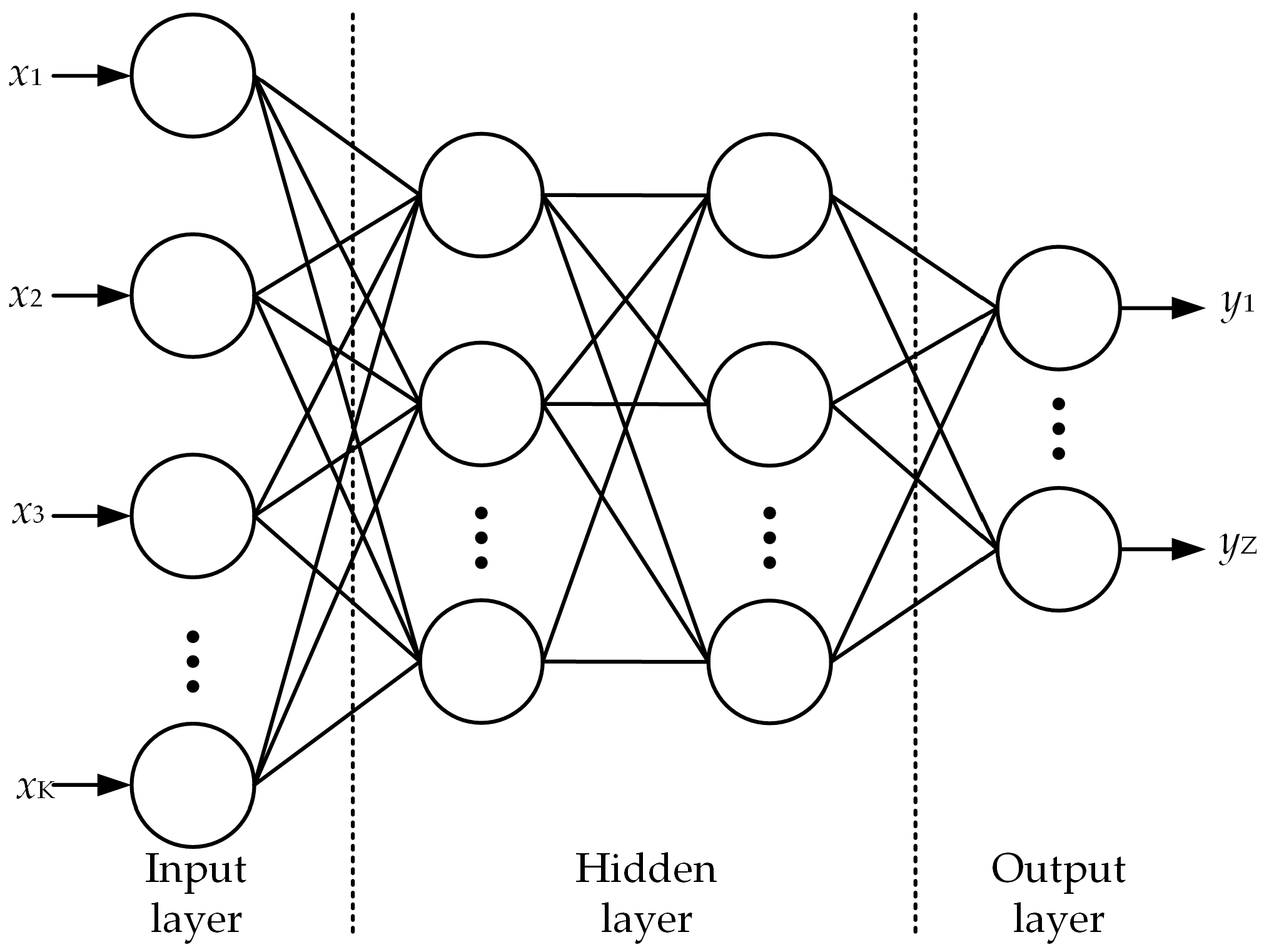
2.1. Stacking Ensemble Multilayer Perceptron
2.2. Input Vectors and Output of SEMLP
2.3. Training of the TSA Model Based on SEMLP
2.4. Evaluation Indices
2.5. Controllable Generator Set Selection Based on Sensitivity Analysis
3. Transient Stability Preventive Control Algorithm
3.1. TSCOPF
3.1.1. Objective Function
3.1.2. Power Flow Constraints
3.1.3. Inequality Constraints
3.1.4. Transient Stability Constraints
3.2. TSPC Algorithm: AFO Driven by SEMLP-Based TSA
4. Case Study
4.1. Sample Dataset Generation
4.2. TSA Performance Analysis
4.2.1. Performance of SEMLP
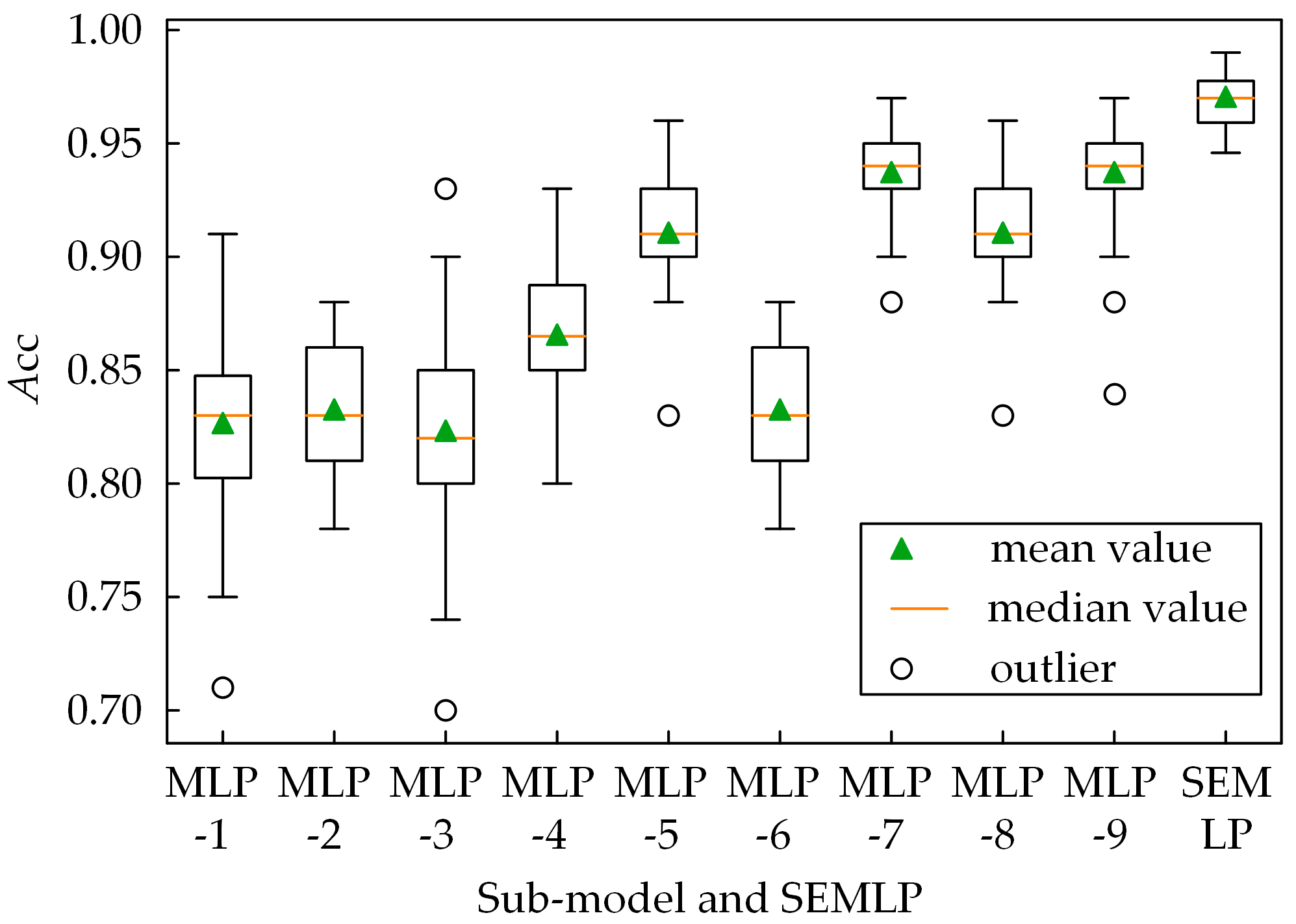
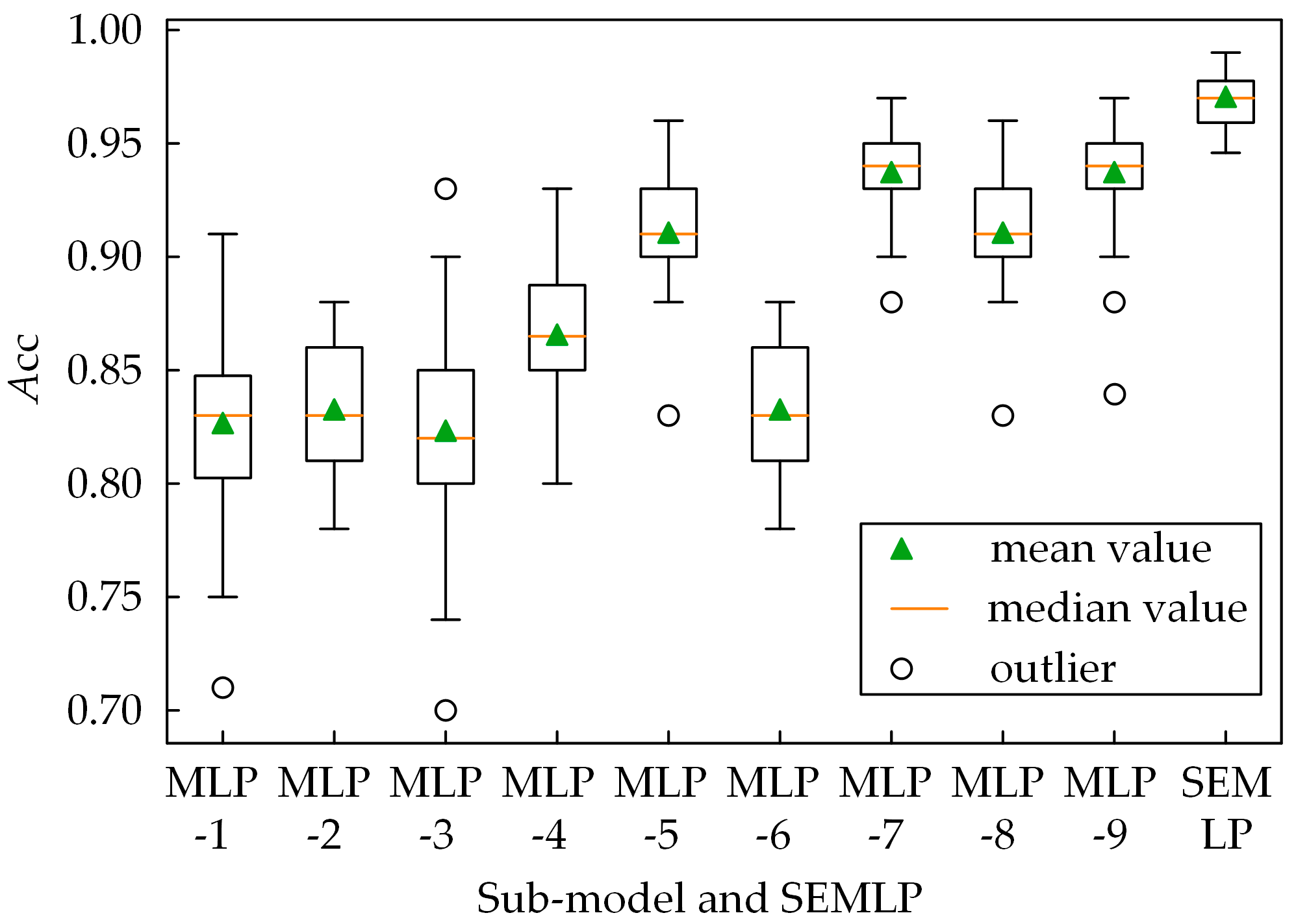
4.2.2. Comparison between SEMLP and MLP Sub-Model
4.3. Sensitivity Analysis
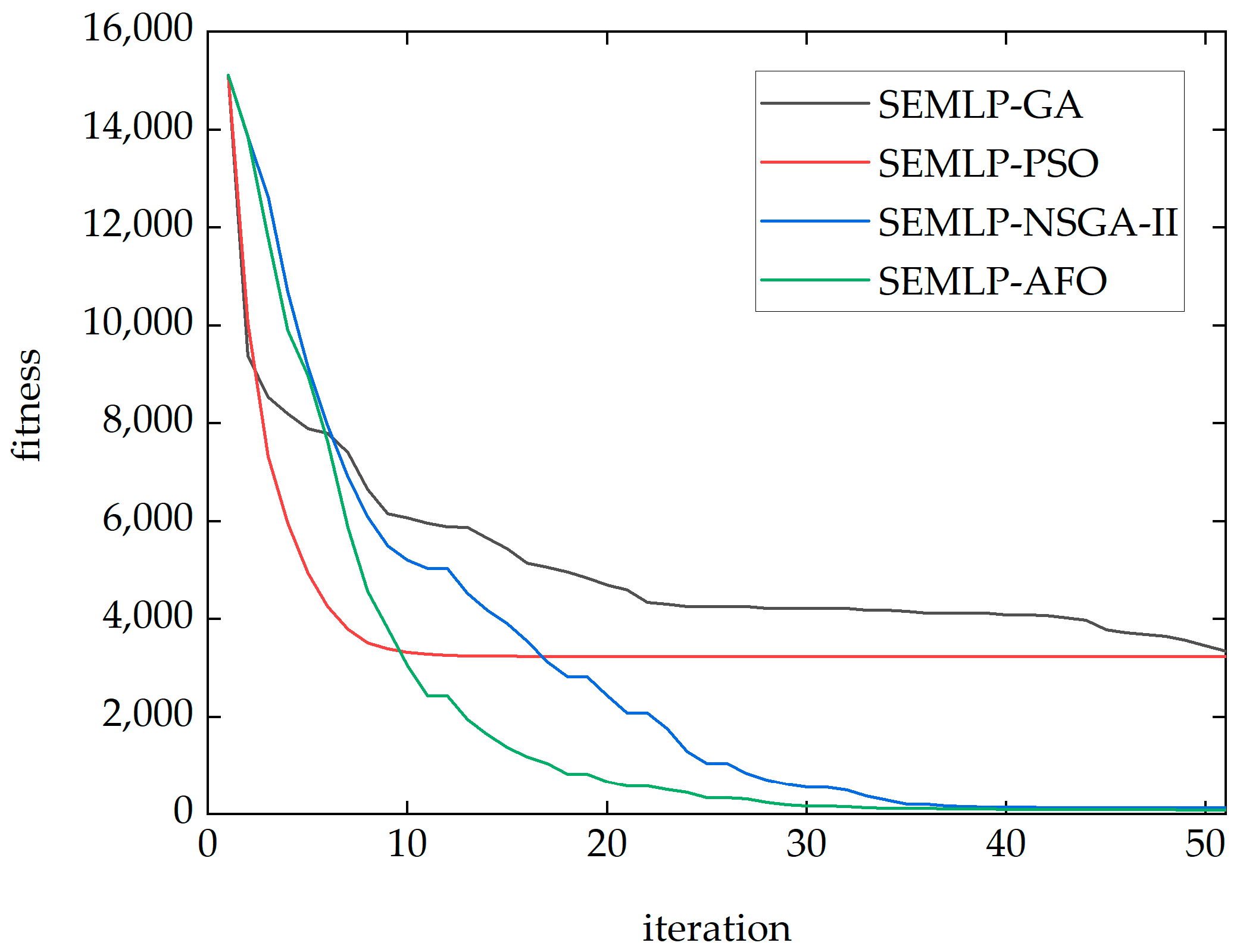
4.4. Analysis of SEMLP-Driven AFO TSPC Method’s Results
4.5. TSPC Experiment Based on IEEE 300-Bus System
5. Conclusions
- Stability. The stacking ensemble multilayer perceptron (SEMLP) approach is introduced to determine the transient stability of the system. The two-layer integrated model is designed in this paper to extract valuable information from diverse system operational features, thereby enhancing the overall model’s generalizability and accuracy. Based on this method, an online TSA model is developed and serves to determine the transient stability for TSPC. Experimental validation has demonstrated that the TSA model proposed in this paper possesses a significant advantage in terms of accuracy.
- Economy. The TSPC method, AFO driven by SEMLP, is developed to minimize generator adjustment costs. This method offers control strategies that are highly effective in achieving near-optimal operational costs while ensuring optimal system performance and operational economy.
- Rapidity. The rapidity of the TSPC method can be attributed to the sensitivity analysis and the excellent performance of the SEMLP-AFO model. The sensitivity analysis provides prior knowledge that aids in identifying and addressing issues promptly, while the SEMLP-AFO model’s robust performance ensures that the method performs effectively and efficiently.
- In future work, the proposed method will be tested using practical systems and data.
- An integrated assessment model for power system transient stability can be developed. Power system transient stability can be classified into three categories: rotor angle stability, frequency stability, and voltage stability. This paper focuses on rotor angle transient stability. Future research is going to develop data-driven TSA methods to perform more precise, quick, reliable, and useful stability assessments in voltage stability and frequency stability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, Y.; Zhang, W.; Chow, M.-Y.; Sun, H.; Gooi, H.B.; Peng, J. A Distributed Model-Free Controller for Enhancing Power System Transient Frequency Stability. IEEE Trans. Ind. Inform. 2019, 15, 1361–1371. [Google Scholar] [CrossRef]
- Yousefian, R.; Bhattarai, R.; Kamalasadan, S. Transient Stability Enhancement of Power Grid with Integrated Wide Area Control of Wind Farms and Synchronous Generators. IEEE Trans. Power Syst. 2017, 32, 4818–4831. [Google Scholar] [CrossRef]
- Hakami, A.; Hasan, K.; Alzubaidi, M.; Datta, M. A Review of Uncertainty Modelling Techniques for Probabilistic Stability Analysis of Renewable-Rich Power Systems. Energies 2023, 16, 112. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw Hill Education: New York, NY, USA, 2002. [Google Scholar]
- Chiang, H.-D. Direct Methods for Stability Analysis of Electric Power Systems: Theoretical Foundation, BCU Methodologies, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Zhang, S.; Zhu, Z.; Li, Y. A Critical Review of Data-Driven Transient Stability Assessment of Power Systems: Principles, Prospects and Challenges. Energies 2021, 14, 7238. [Google Scholar] [CrossRef]
- Lee, H.; Kim, J.; Park, J.H.; Chung, S.-H. Power System Transient Stability Assessment Using Convolutional Neural Network and Saliency Map. Energies 2023, 16, 7743. [Google Scholar] [CrossRef]
- Wehenkel, L.; Van Cutsem, T.; Ribbens-Pavella, M. An Artificial Intelligence Framework for On-Line Transient Stability Assessment of Power Systems. IEEE Power Eng. Rev. 1989, 9, 77–78. [Google Scholar] [CrossRef]
- Hossain, E.; Khan, I.; Un-Noor, F.; Sikander, S.S.; Sunny, M.S.H. Application of Big Data and Machine Learning in Smart Grid, and Associated Security Concerns: A Review. IEEE Access 2019, 7, 13960–13988. [Google Scholar] [CrossRef]
- Hamilton, R.; Papadopoulos, P.; Bukhsh, W.; Bell, K. Identification of Important Locational, Physical and Economic Dimensions in Power System Transient Stability Margin Estimation. IEEE Trans. Sustain. Energy 2022, 13, 1135–1146. [Google Scholar] [CrossRef]
- Wang, H.; Hu, L.; Zhang, Y. SVM Based Imbalanced Correction Method for Power Systems Transient Stability Evaluation. ISA Trans. 2022, 136, 245–253. [Google Scholar] [CrossRef]
- Zhang, N.; Qian, H.; He, Y.; Li, L.; Sun, C. A Data-Driven Method for Power System Transient Instability Mode Identification Based on Knowledge Discovery and XGBoost Algorithm. IEEE Access 2021, 9, 154172–154182. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Zhang, Y.; Shi, X.; Zhang, H.; Cao, Y.; Terzija, V. Review on Deep Learning Applications in Frequency Analysis and Control of Modern Power System. Int. J. Electr. Power Energy Syst. 2022, 136, 107744. [Google Scholar] [CrossRef]
- Wu, S.; Zheng, L.; Hu, W.; Yu, R.; Liu, B. Improved Deep Belief Network and Model Interpretation Method for Power System Transient Stability Assessment. J. Mod. Power Syst. Clean Energy 2020, 8, 27–37. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, Q.; Sun, H.; Yu, Z.; Wu, J.; Hao, L. A Novel Data-Driven Approach for Transient Stability Prediction of Power Systems Considering the Operational Variability. Int. J. Electr. Power Energy Syst. 2019, 107, 379–394. [Google Scholar] [CrossRef]
- Ren, C.; Xu, Y. A Fully Data-Driven Method Based on Generative Adversarial Networks for Power System Dynamic Security Assessment With Missing Data. IEEE Trans. Power Syst. 2019, 34, 5044–5052. [Google Scholar] [CrossRef]
- Ruiz-Vega, D.; Pavella, M. A Comprehensive Approach to Transient Stability Control Part 1: Near Optimal Preventive Control. In Proceedings of the 2003 IEEE Power Engineering Society General Meeting (IEEE Cat. No.03CH37491), Toronto, ON, Canada, 13–17 July 2003; Volume 3, p. 1810. [Google Scholar]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B.; et al. Definition and Classification of Power System Stability—Revisited & Extended. IEEE Trans. Power Syst. 2021, 36, 3271–3281. [Google Scholar] [CrossRef]
- Gan, D.; Thomas, R.; Zimmerman, R. Stability-Constrained Optimal Power Flow. IEEE Trans. Power Syst. 2000, 15, 535–540. [Google Scholar] [CrossRef]
- Yuan, Y.; Kubokawa, J.; Sasaki, H. A Solution of Optimal Power Flow with Multicontingency Transient Stability Constraints. IEEE Trans. Power Syst. 2003, 18, 1094–1102. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Liu, J.; Huang, Z.; Liu, T.; Qiu, G. Preventive Transient Stability Control Based on Neural Network Security Predictor. Power Syst. Technol. 2018, 42, 4076–4084. [Google Scholar]
- Su, T.; Liu, Y.; Zhao, J.; Liu, J. Deep Belief Network Enabled Surrogate Modeling for Fast Preventive Control of Power System Transient Stability. IEEE Trans. Ind. Inform. 2022, 18, 315–326. [Google Scholar] [CrossRef]
- Dong, X.; Yu, Z.; Cao, W.; Shi, Y.; Ma, Q. A Survey on Ensemble Learning. Front. Comput. Sci. 2020, 14, 241–258. [Google Scholar] [CrossRef]
- Shi, J.; Zhang, J. Load Forecasting Based on Multi-Model by Stacking Ensemble Learning. Proc. Chin. Soc. Electr. Eng. 2019, 39, 4032–4041. [Google Scholar]
- Yang, Z.; Deng, L.; Wang, Y.; Liu, J. Aptenodytes Forsteri Optimization: Algorithm and Applications. Knowl. Based Syst. 2021, 232, 107483. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Model | Hidden Layer | Neuronal Count per Layer (from Left to Right) |
|---|---|---|
| MLP-1 | 3 | (64, 32, 16) |
| MLP-2 | 4 | (128, 64, 32, 16) |
| MLP-3 | 5 | (256, 128, 64, 32, 16) |
| MLP-4 | 3 | (64, 32, 16) |
| MLP-5 | 4 | (128, 64, 32, 16) |
| MLP-6 | 5 | (256, 128, 64, 32, 16) |
| MLP-7 | 3 | (64, 32, 16) |
| MLP-8 | 4 | (128, 64, 32, 16) |
| MLP-9 | 5 | (256, 128, 64, 32, 16) |
| Meta-classifier MLP | 3 | (64, 32, 16) |
| Real Label | Predicted Results of TSA | |
|---|---|---|
| Stable (Predicted) | Unstable (Predicted) | |
| Stable (actual) | TP | FN |
| Unstable (actual) | FP | TN |
| RF | SVM | CNN | SAE | DBN | SEMLP | |
|---|---|---|---|---|---|---|
| Acc/% | 89.92 | 93.55 | 94.56 | 95.95 | 96.24 | 98.55 |
| TPR/% | 90.42 | 94.94 | 95.80 | 97.33 | 97.61 | 98.64 |
| TNR/% | 87.02 | 91.45 | 92.68 | 94.00 | 94.83 | 98.45 |
| Gmean/% | 88.70 | 93.18 | 94.23 | 95.65 | 96.21 | 98.54 |
| Contingency No. | Fault Line | Fault Bus | Stable State |
|---|---|---|---|
| 1 | 2–3 | 2 or 3 | Stable |
| 2 | 3–4 | 3 or 4 | Unstable |
| 3 | 4–5 | 4 or 5 | Stable |
| 4 | 4–14 | 4 or 14 | Stable |
| 5 | 5–6 | 5 or 6 | Stable |
| 6 | 5–8 | 5 or 8 | Stable |
| 7 | 10–13 | 10 or 13 | Stable |
| 8 | 19–20 | 19 or 20 | Stable |
| 9 | 23–24 | 23 or 24 | Stable |
| 10 | 28–29 | 28 or 29 | Unstable |
| Generator | Before TSPC/MW | After TSPC/MW | Output Change/MW | Unit Adjustment Cost | Gen. Cost |
|---|---|---|---|---|---|
| 1 | 249.57 | 254.72 | 5.15 | 1 | 142.425 |
| 2 | 687.28 | 685.74 | −1.54 | 1 | |
| 3 | 648.89 | 672.35 | 23.46 | 1 | |
| 4 | 630.92 | 626.74 | −4.18 | 0.5 | |
| 5 | 507.13 | 478.73 | −28.40 | 0.5 | |
| 6 | 648.89 | 601.41 | −47.48 | 0.5 | |
| 7 | 559.04 | 531.04 | −28 | 0.5 | |
| 8 | 539.08 | 575.03 | 35.95 | 1 | |
| 9 | 828.58 | 872.72 | 44.14 | 0.5 | |
| 10 | 998.29 | 998.74 | 0.45 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Zhang, D.; Hu, W.; Han, X. Power System Transient Stability Preventive Control via Aptenodytes Forsteri Optimization with an Improved Transient Stability Assessment Model. Energies 2024, 17, 1942. https://doi.org/10.3390/en17081942
Xie Z, Zhang D, Hu W, Han X. Power System Transient Stability Preventive Control via Aptenodytes Forsteri Optimization with an Improved Transient Stability Assessment Model. Energies. 2024; 17(8):1942. https://doi.org/10.3390/en17081942
Chicago/Turabian StyleXie, Zhijun, Dongxia Zhang, Wei Hu, and Xiaoqing Han. 2024. "Power System Transient Stability Preventive Control via Aptenodytes Forsteri Optimization with an Improved Transient Stability Assessment Model" Energies 17, no. 8: 1942. https://doi.org/10.3390/en17081942
APA StyleXie, Z., Zhang, D., Hu, W., & Han, X. (2024). Power System Transient Stability Preventive Control via Aptenodytes Forsteri Optimization with an Improved Transient Stability Assessment Model. Energies, 17(8), 1942. https://doi.org/10.3390/en17081942