
Assessing the Paradox of Autonomous Vehicles: Promised Fuel Efficiency vs. Aggregate Fuel Consumption



Abstract
1. Introduction
2. Methodology
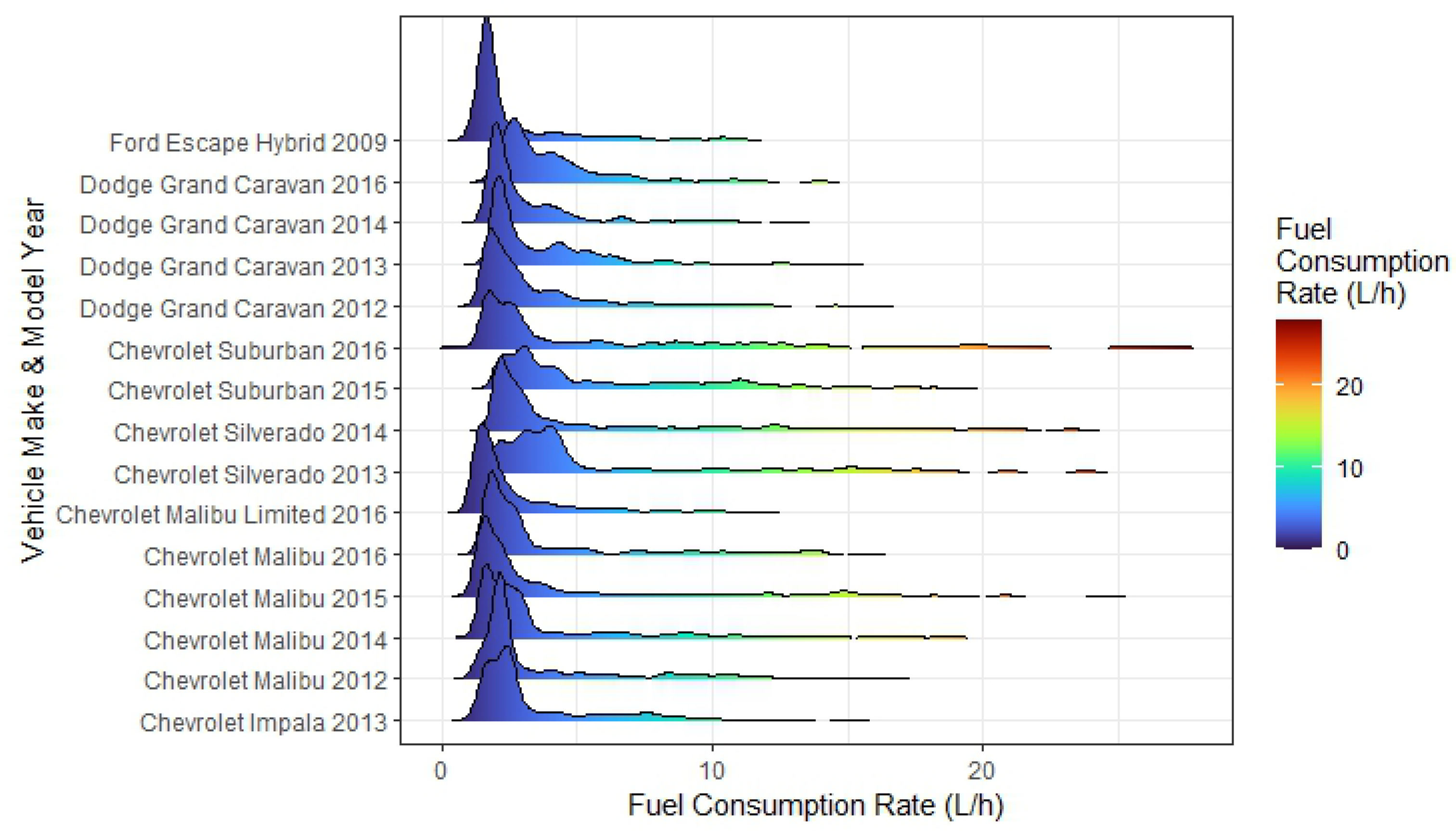
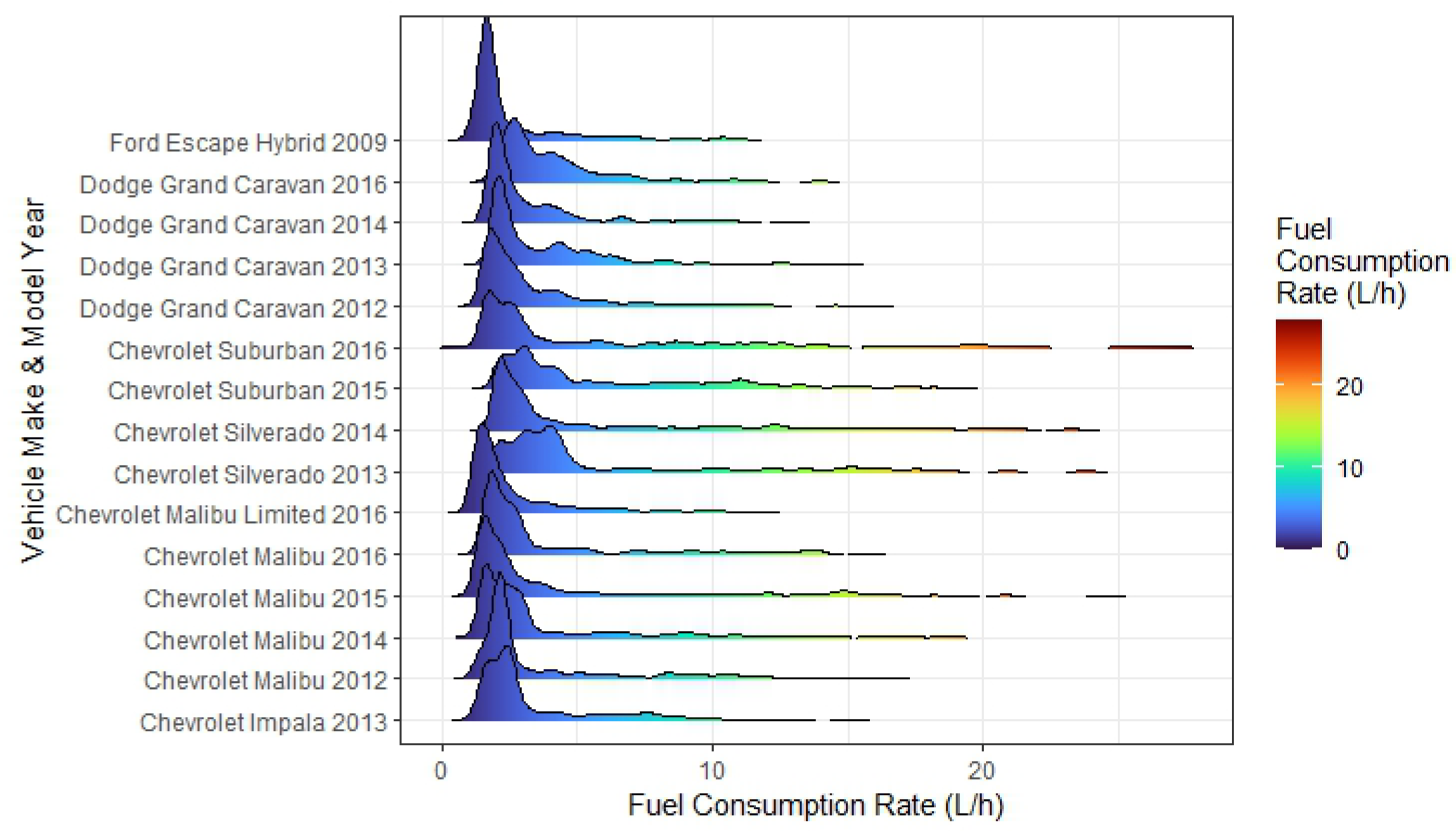
2.1. On-Board Diagnostics for Measuring Human-Driven Vehicle Fuel Consumption Rates
2.2. Fuel Consumption Saving Rates Using Single AVs
2.2.1. Car-Following
2.2.2. Platooning
2.2.3. Powertrain
2.2.4. Intersection Control
2.3. Traffic Capacities and Travel Demand for HDVs and AVs
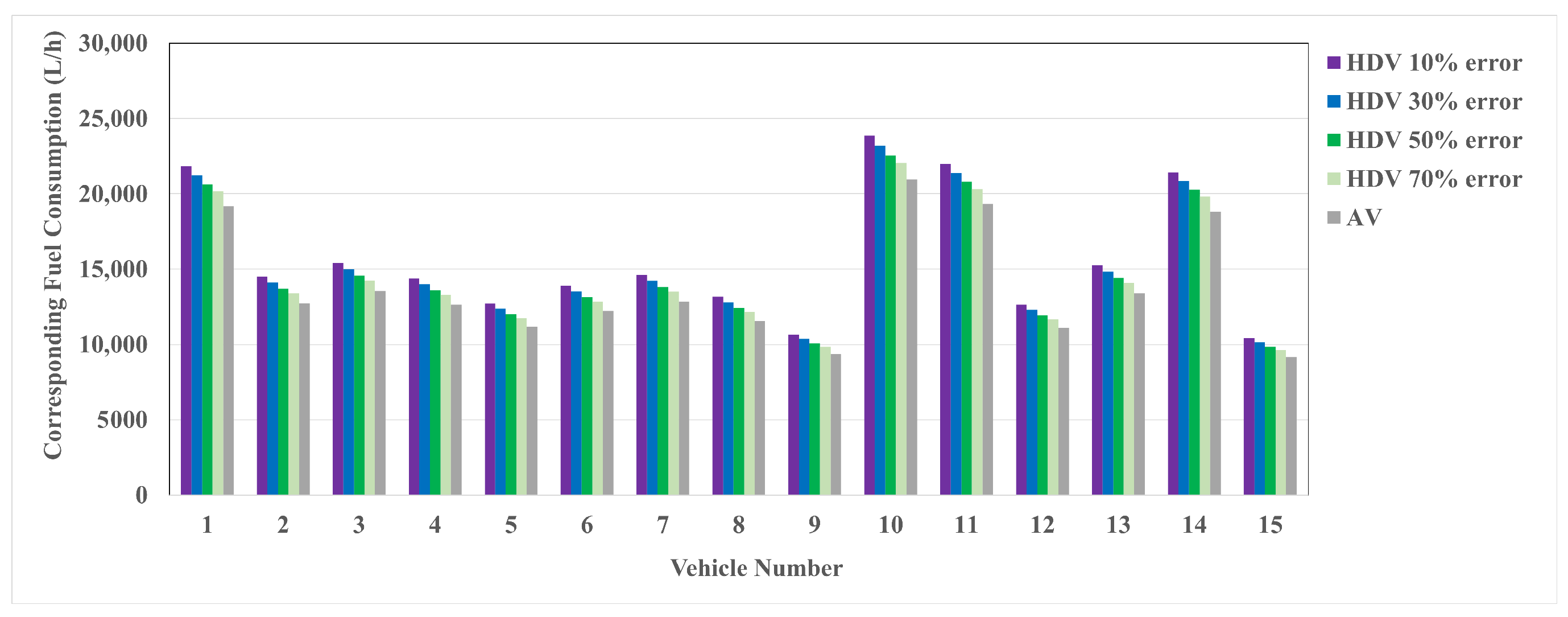
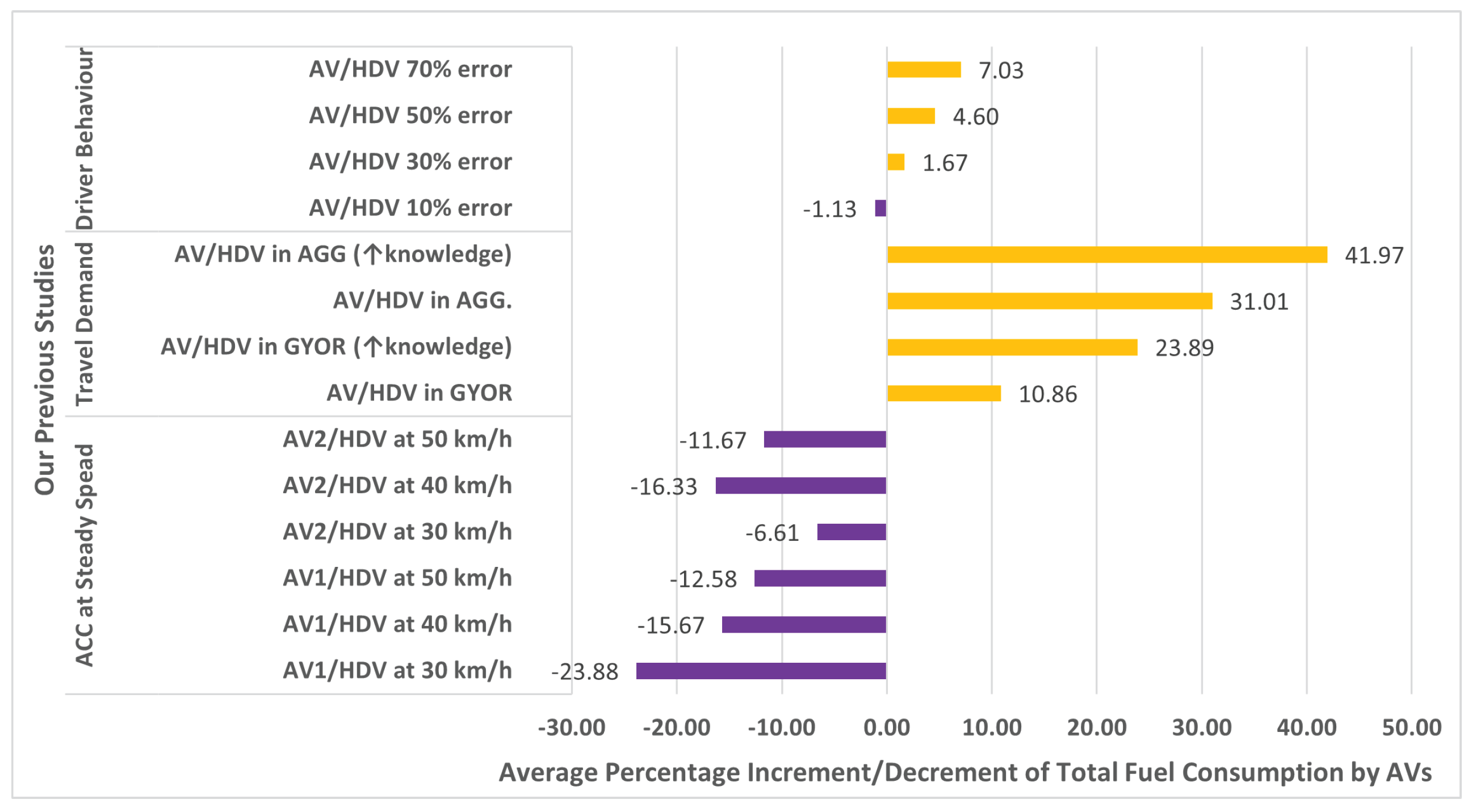
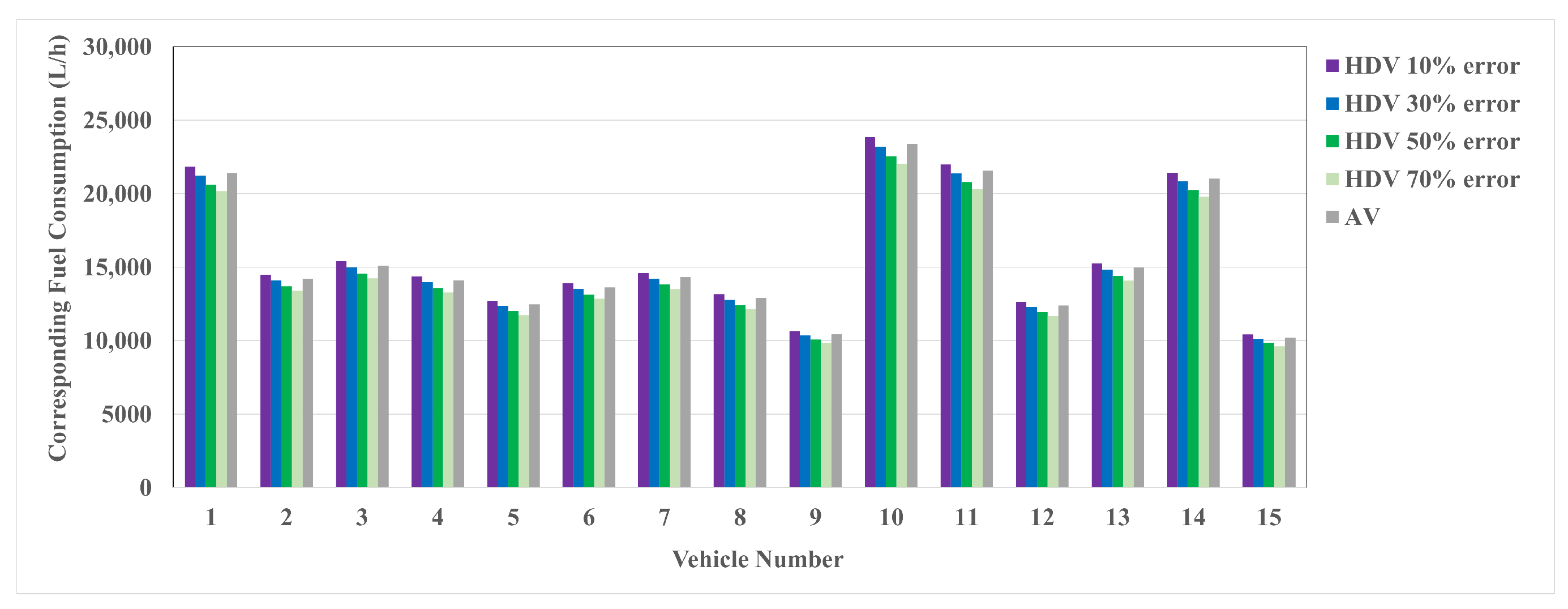
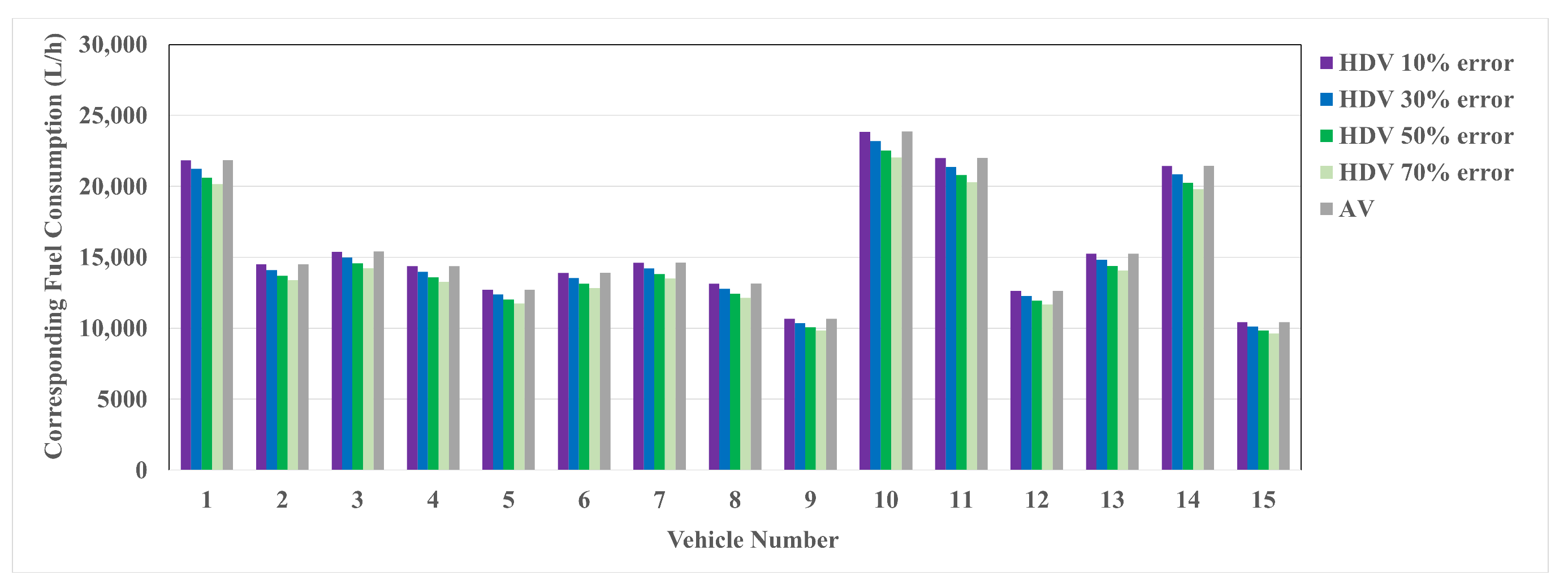
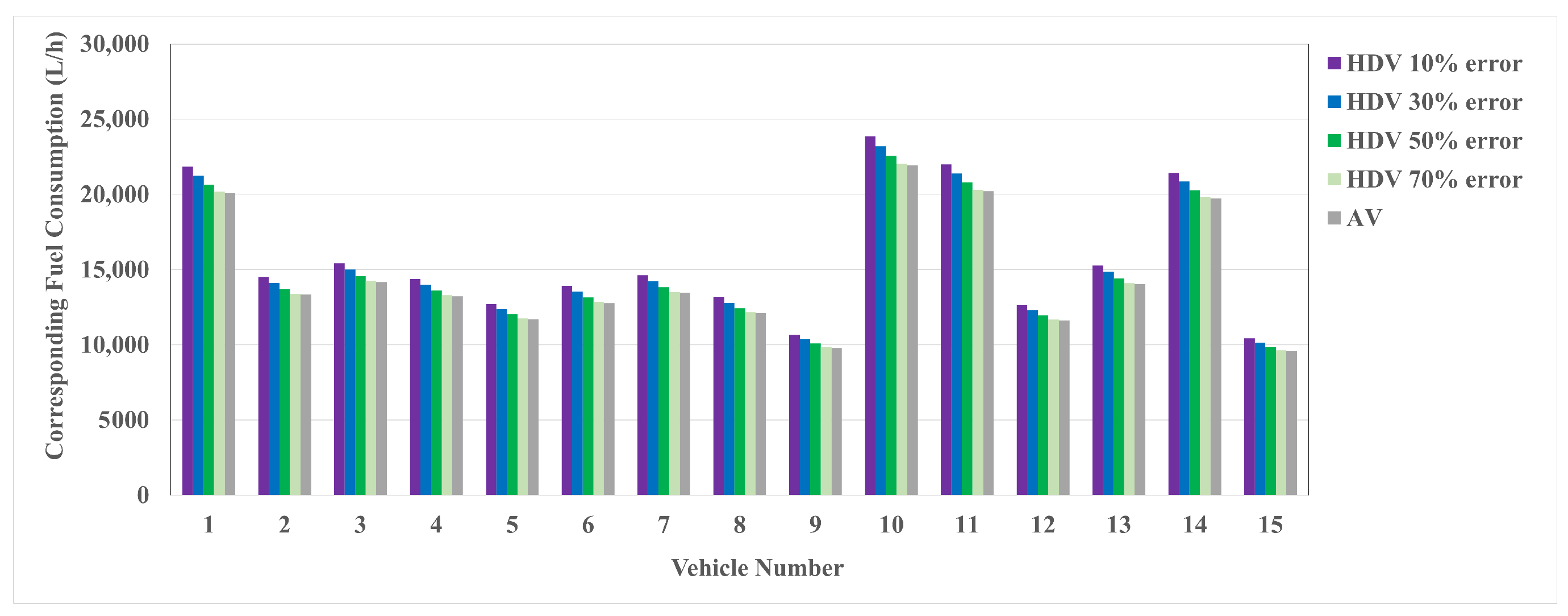
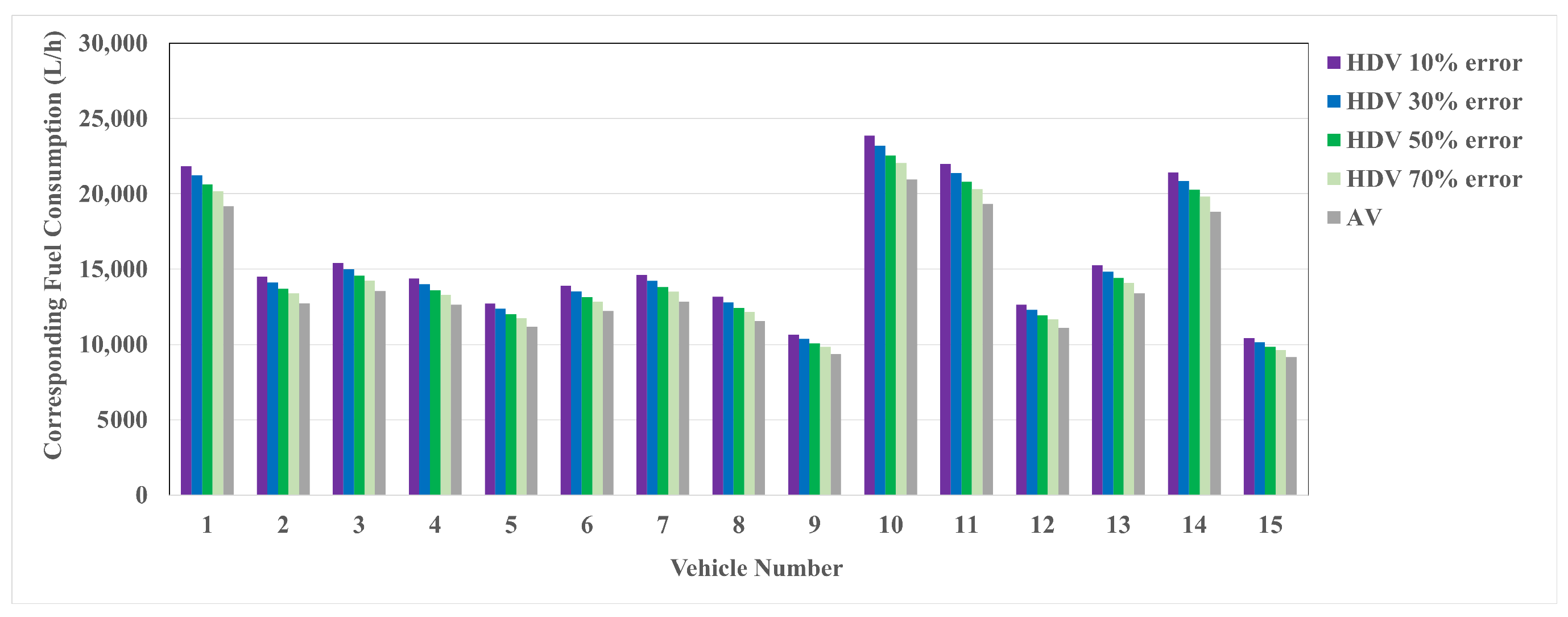
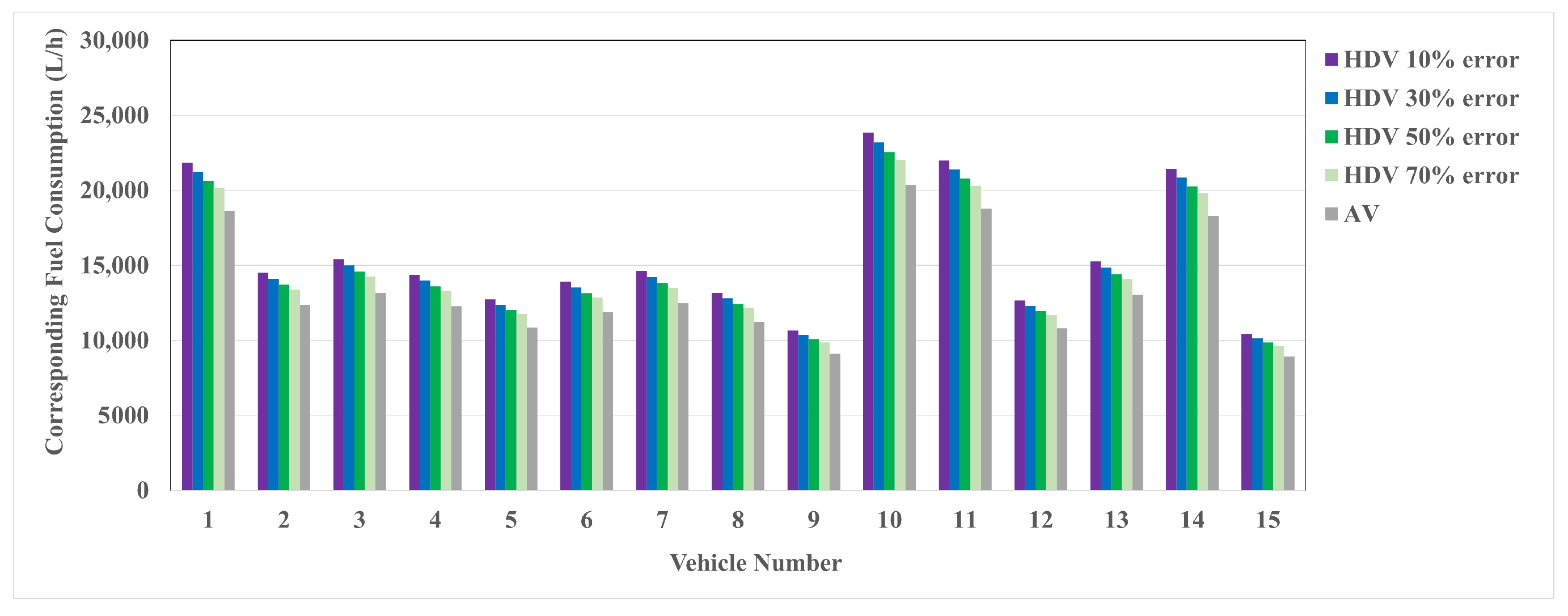
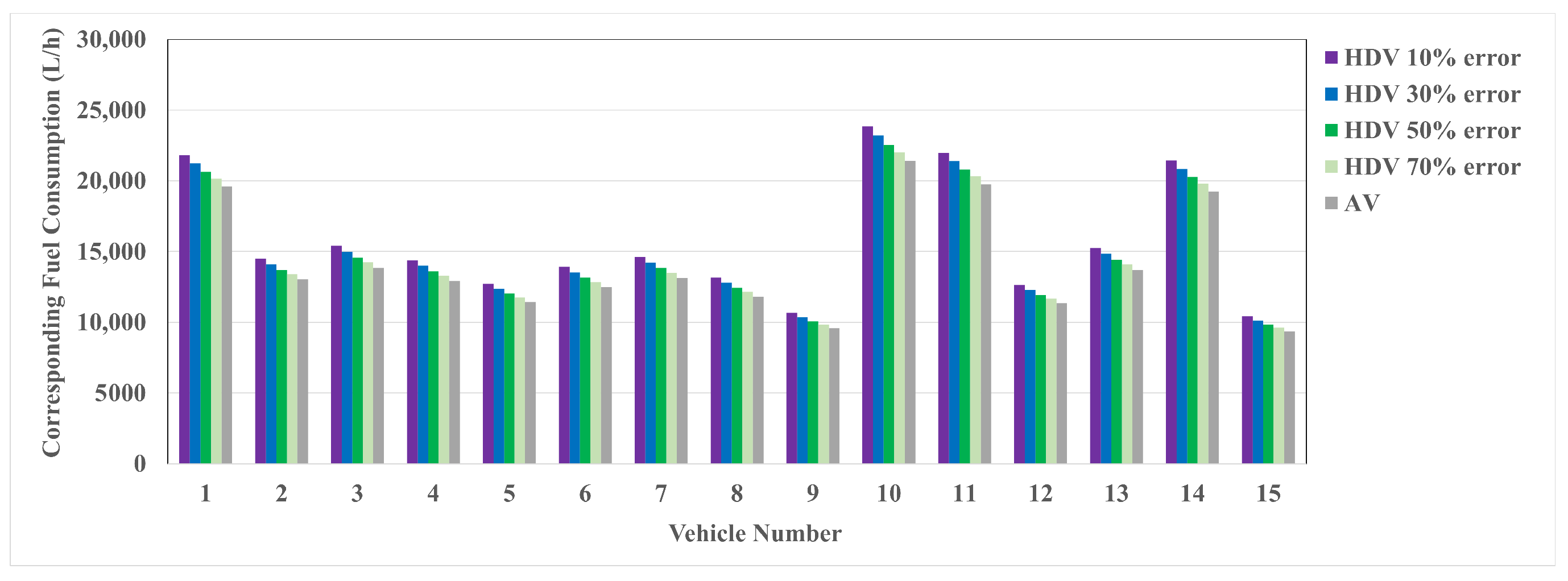
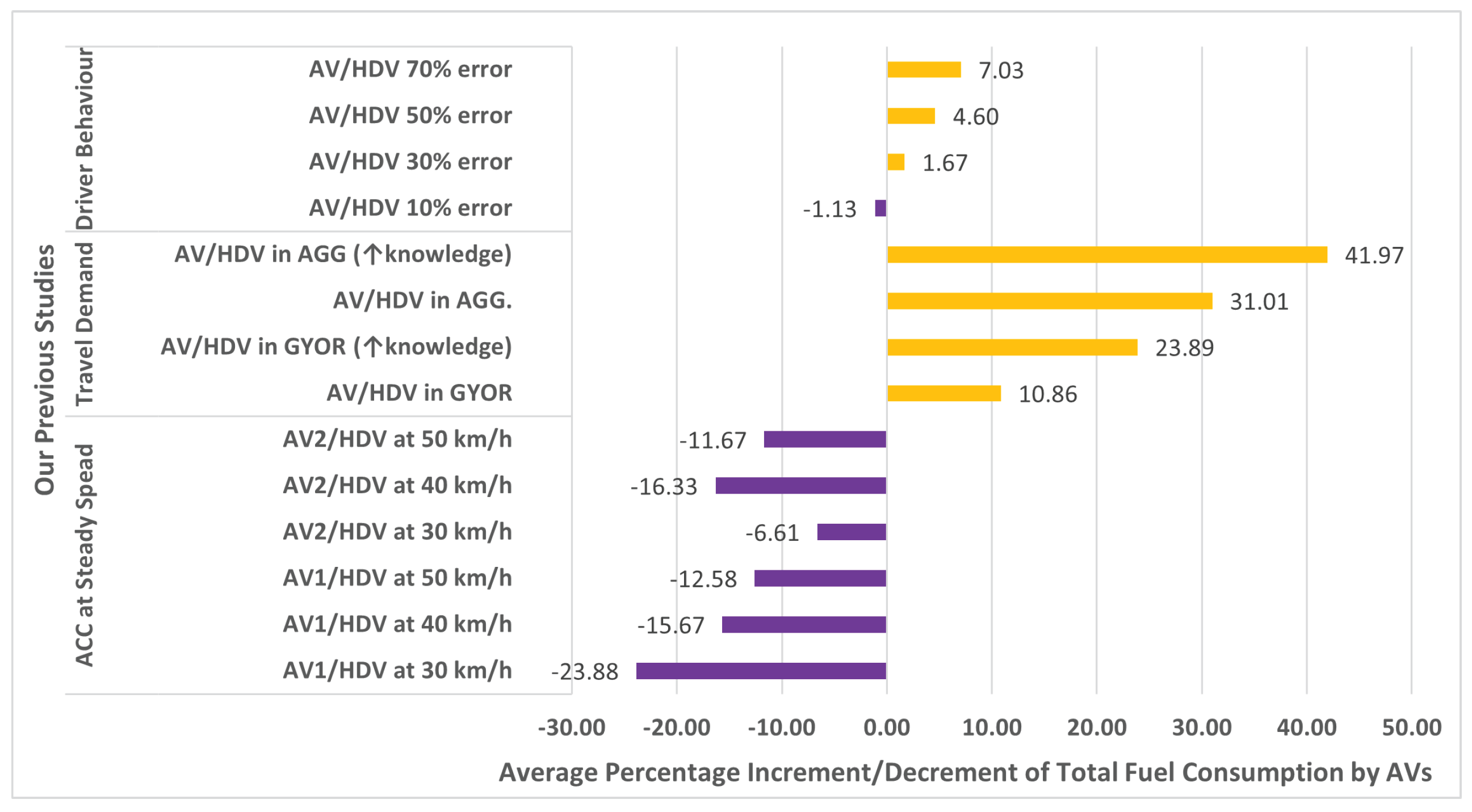
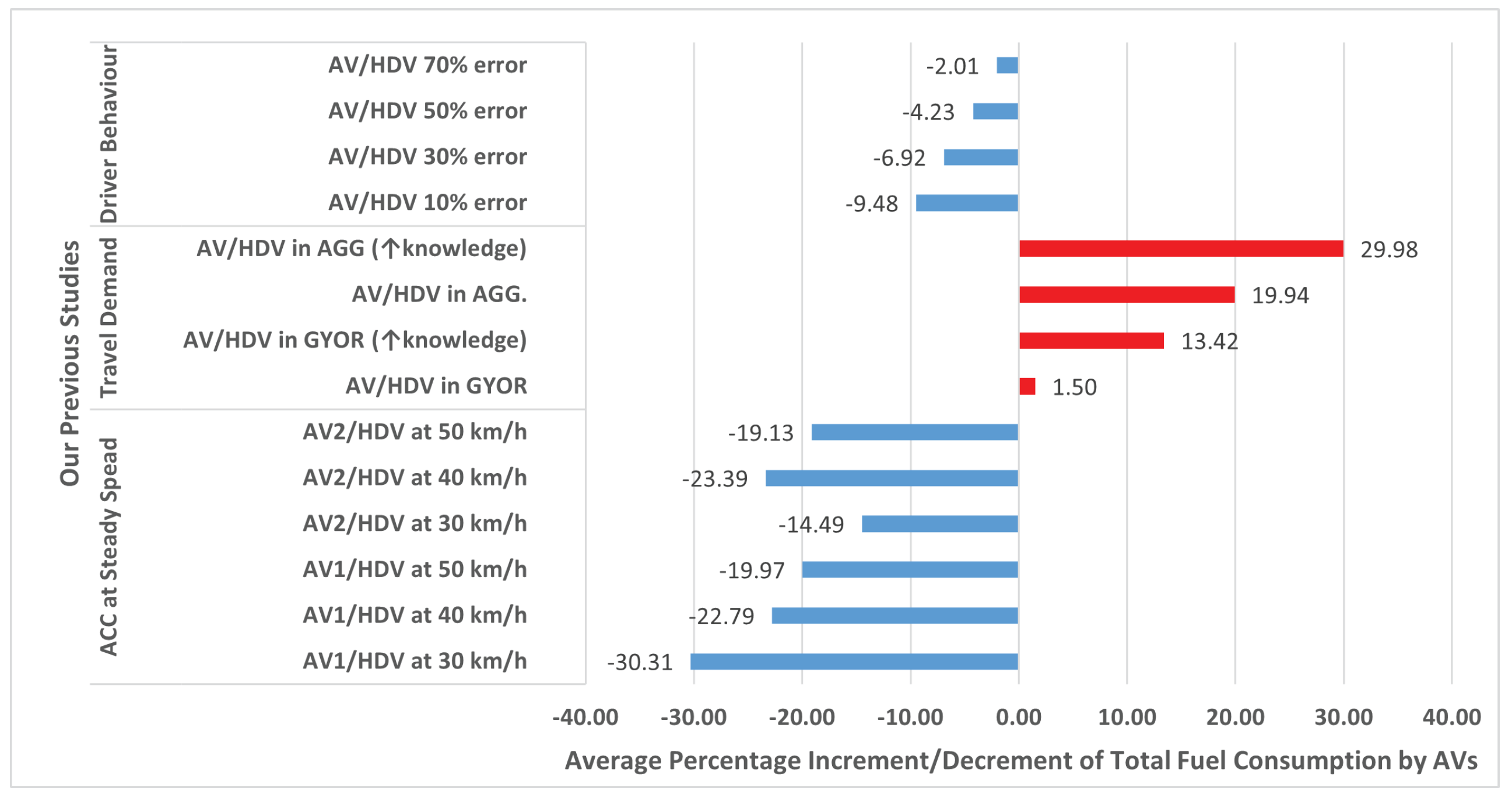
- Driver behavior [51]: In this study, the Wiedemann microsimulation model was applied to investigate the impact of AVs on real traffic. Two driver behavior parameters were studied: driving errors due to distractions and possible interactions with vehicles ahead of the driver. Different AV penetration rates and various percentages of driving errors were also included in the study. As a result, an increase in capacity was achieved due to the use of AVs.
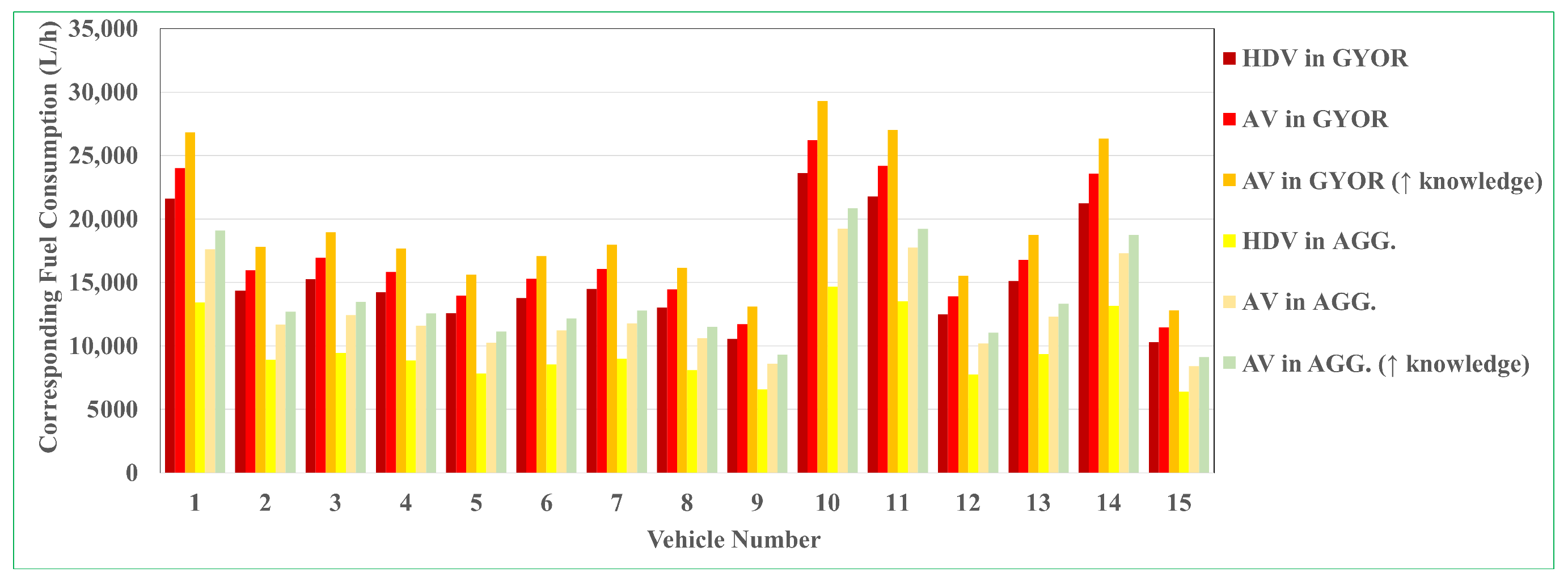
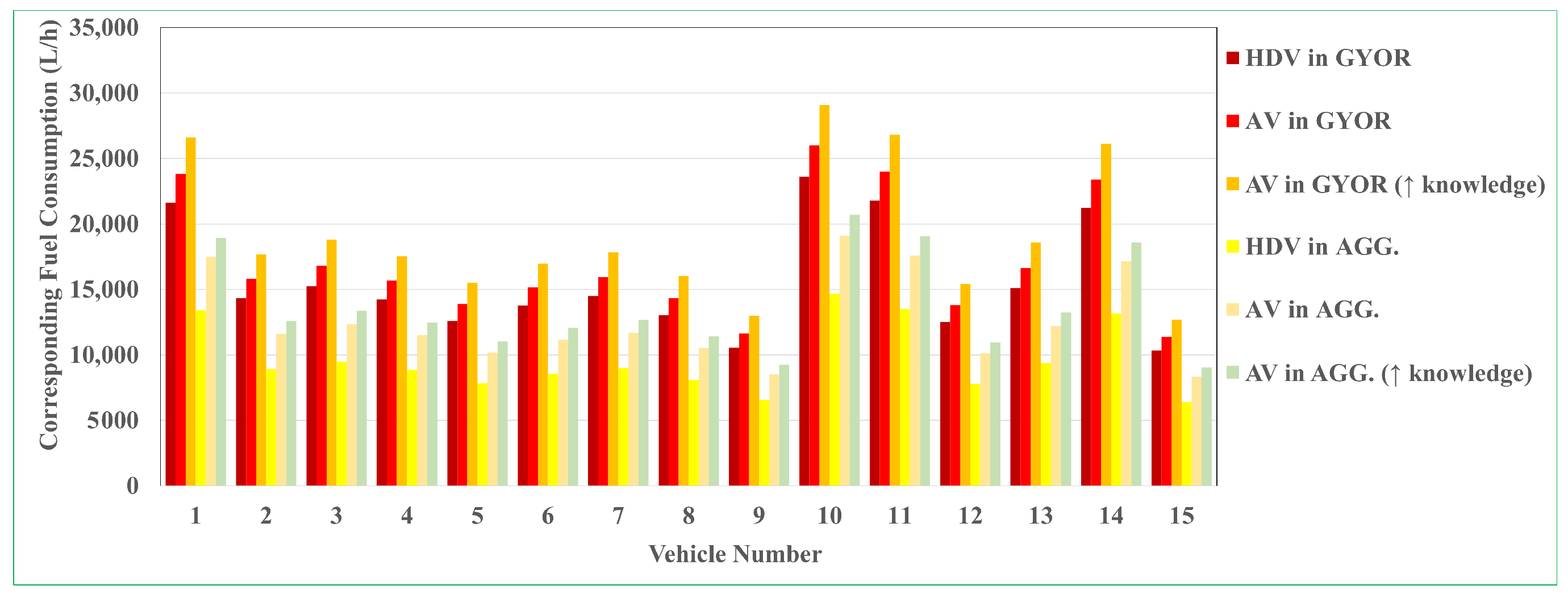
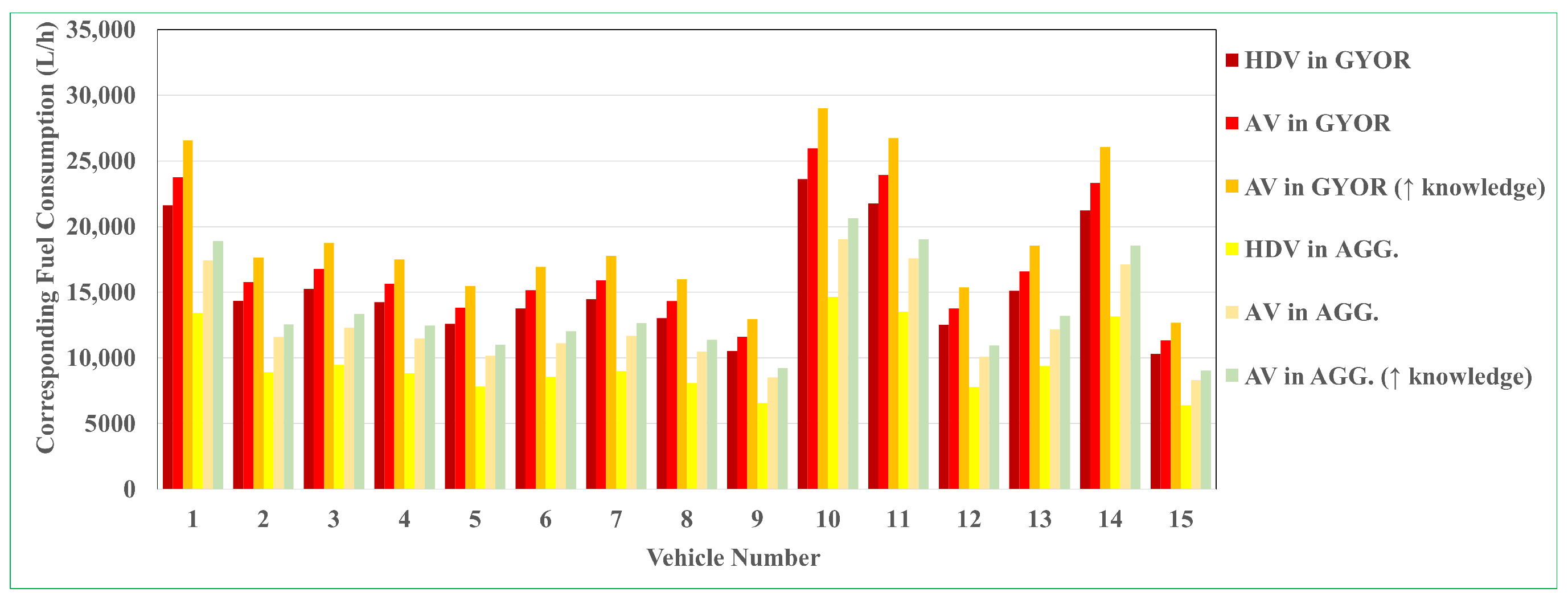
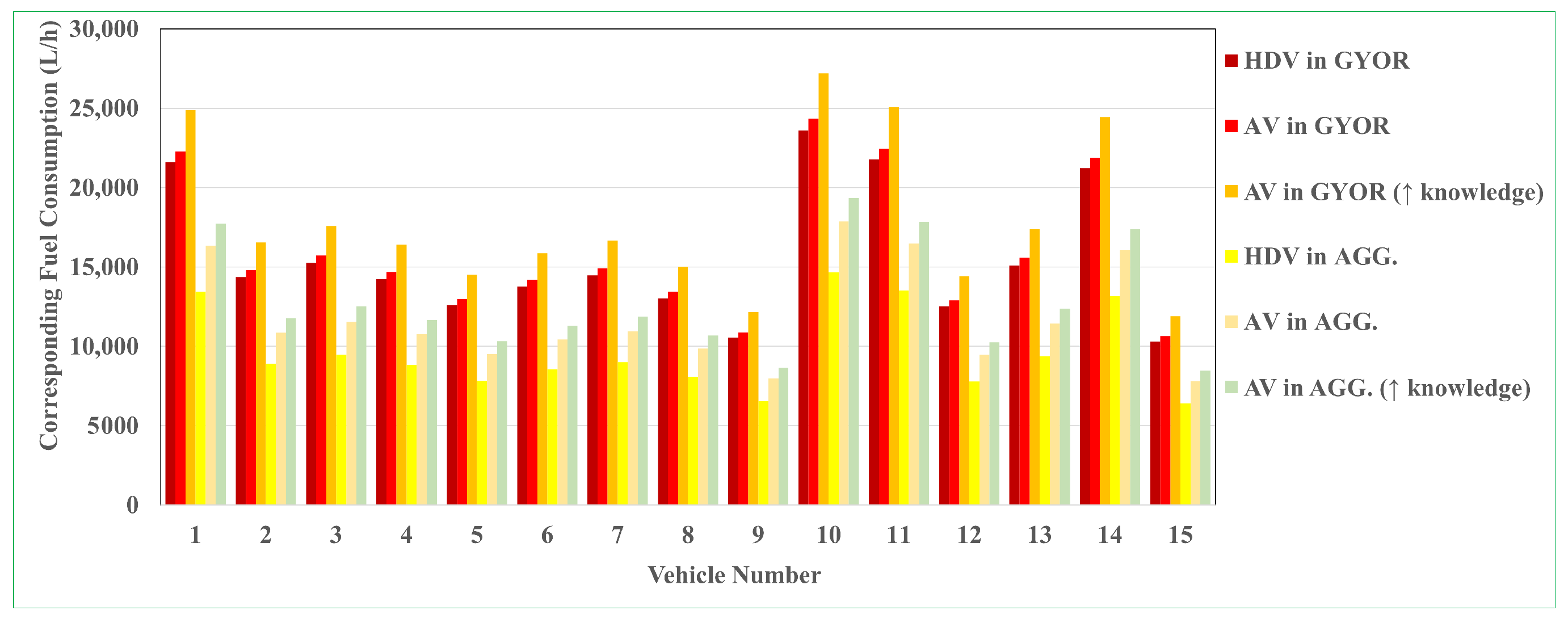
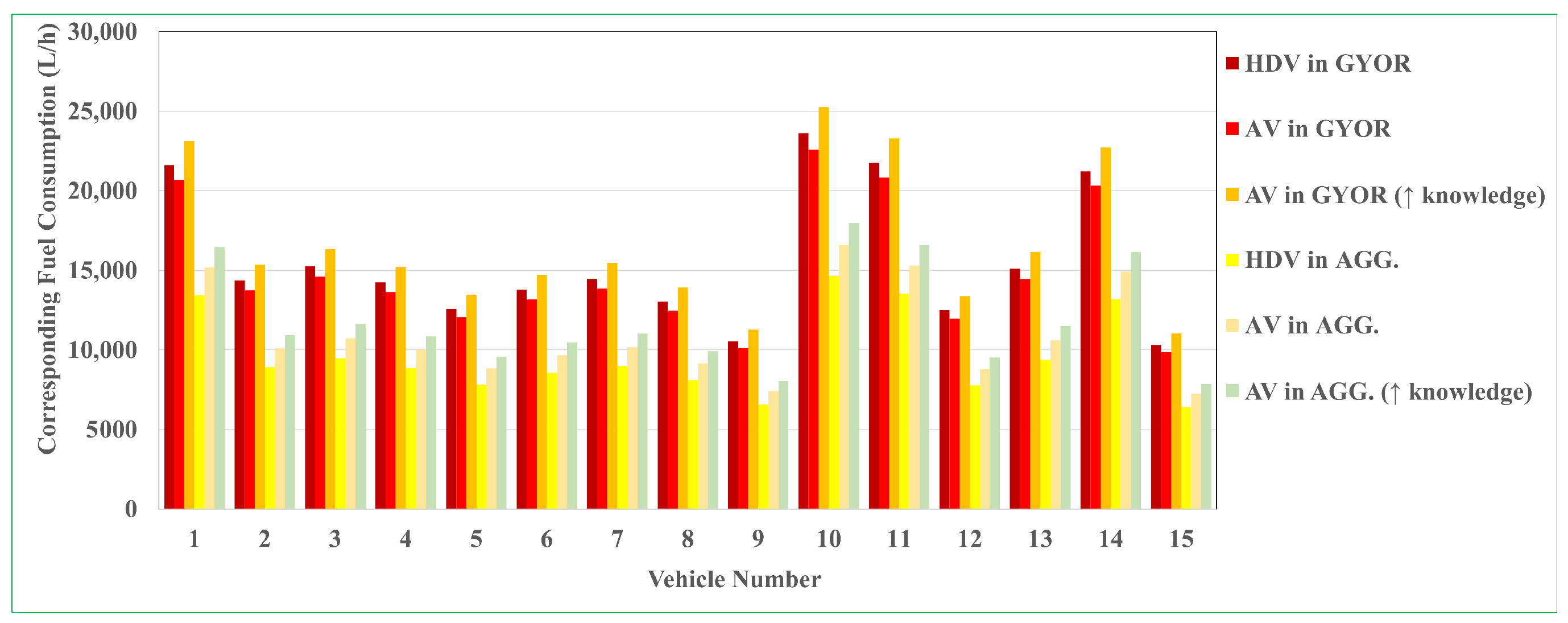
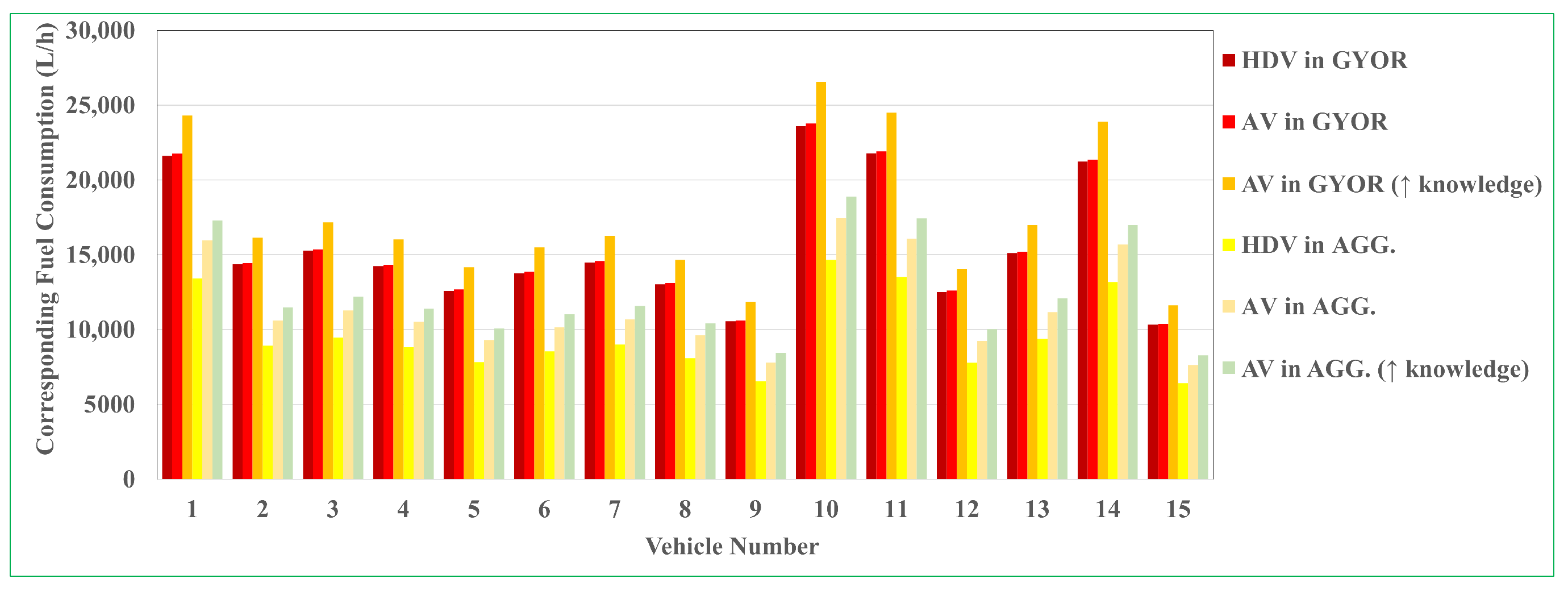
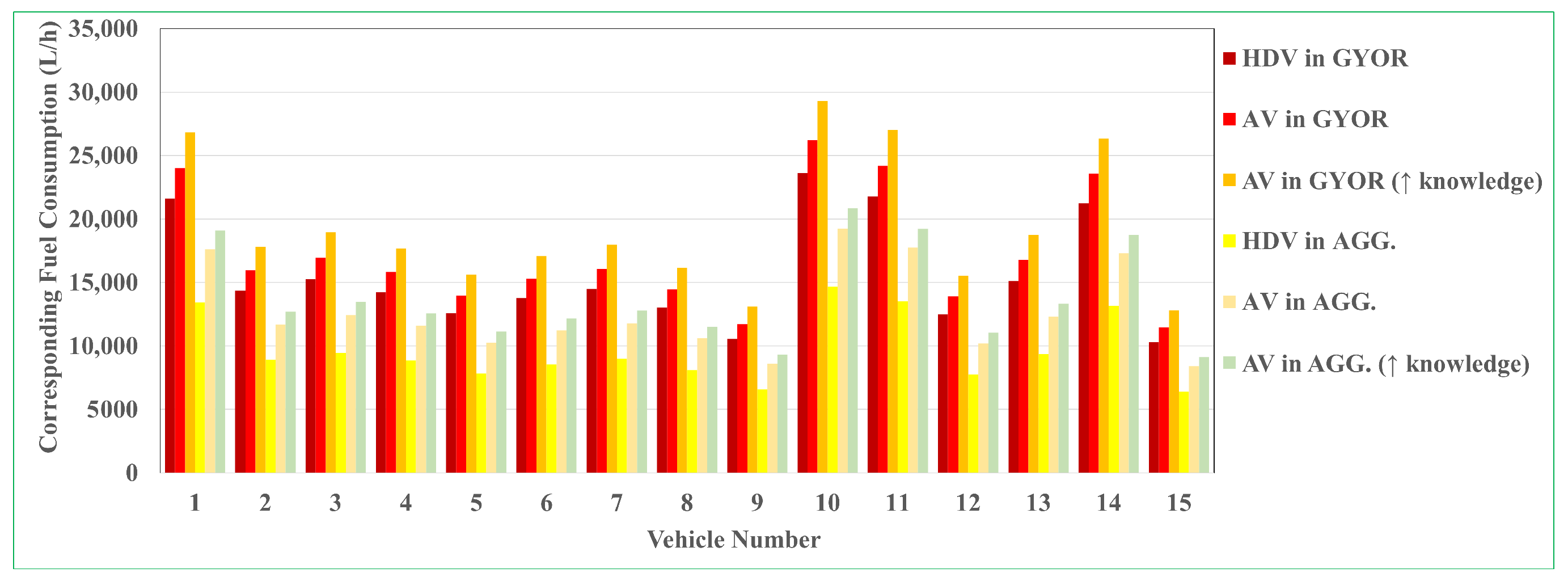
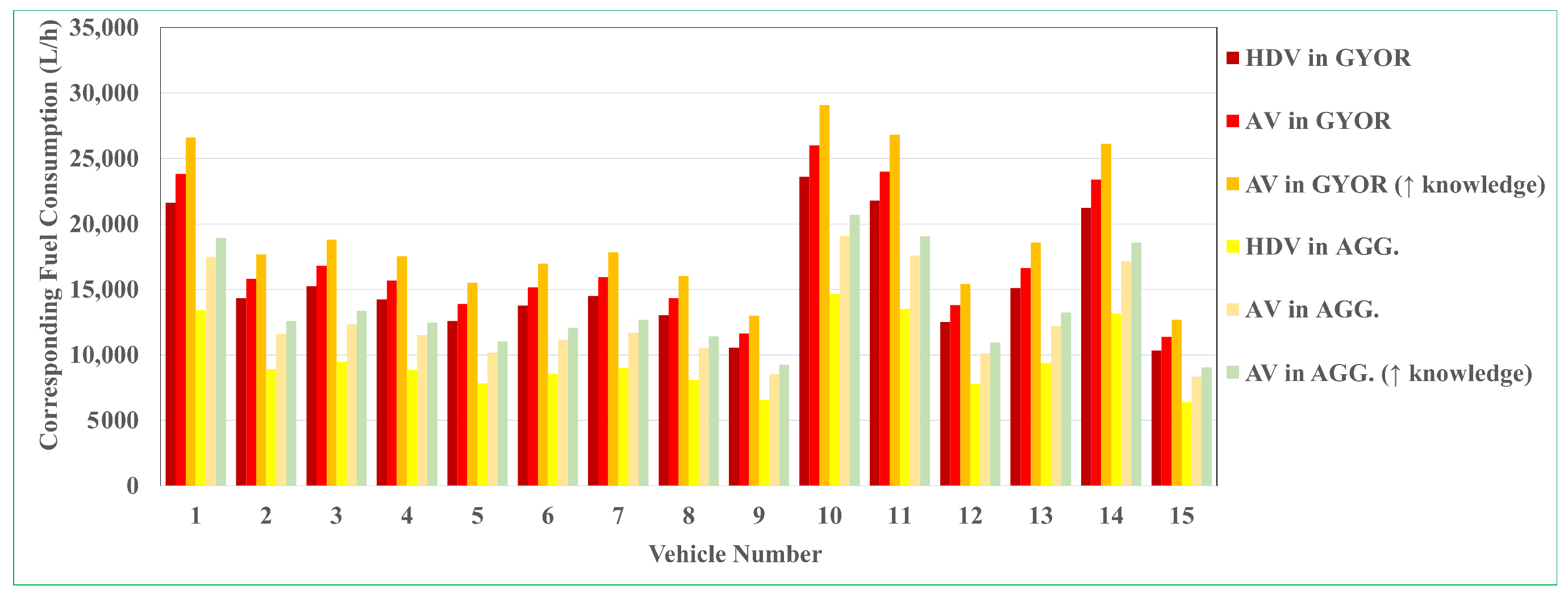
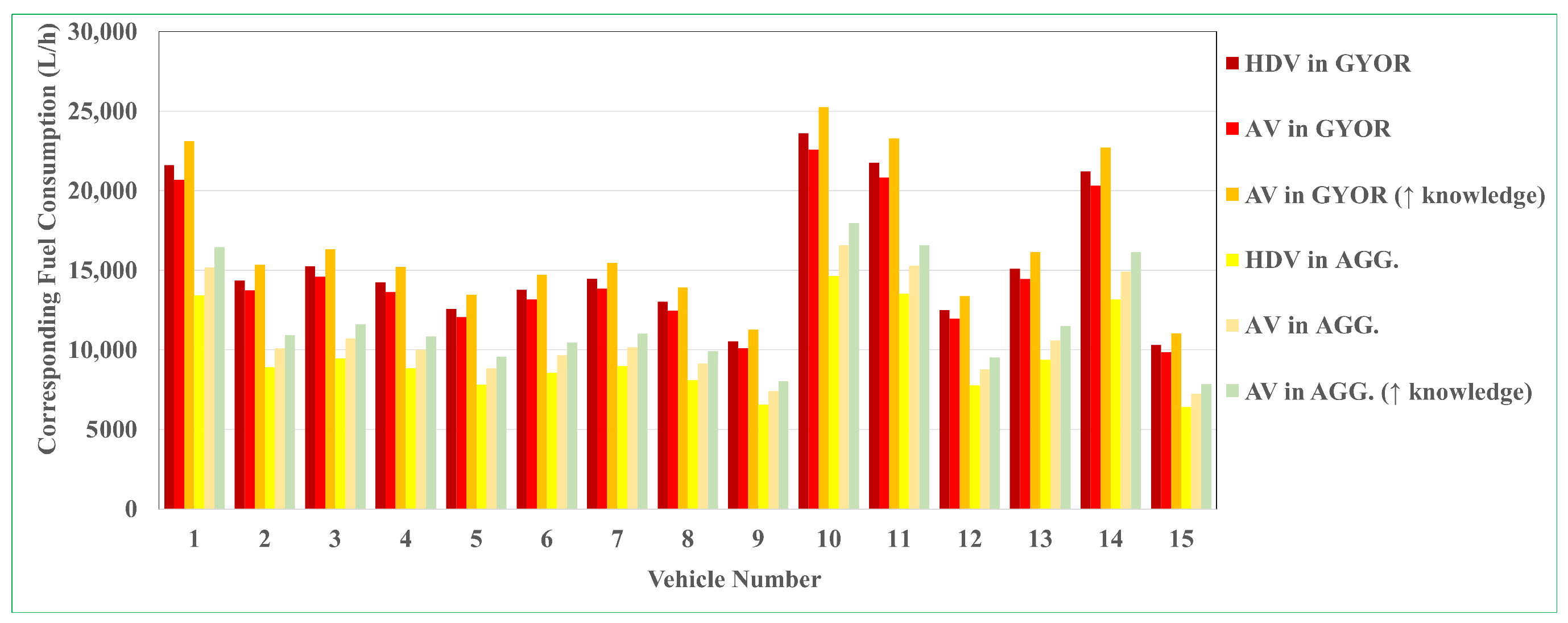
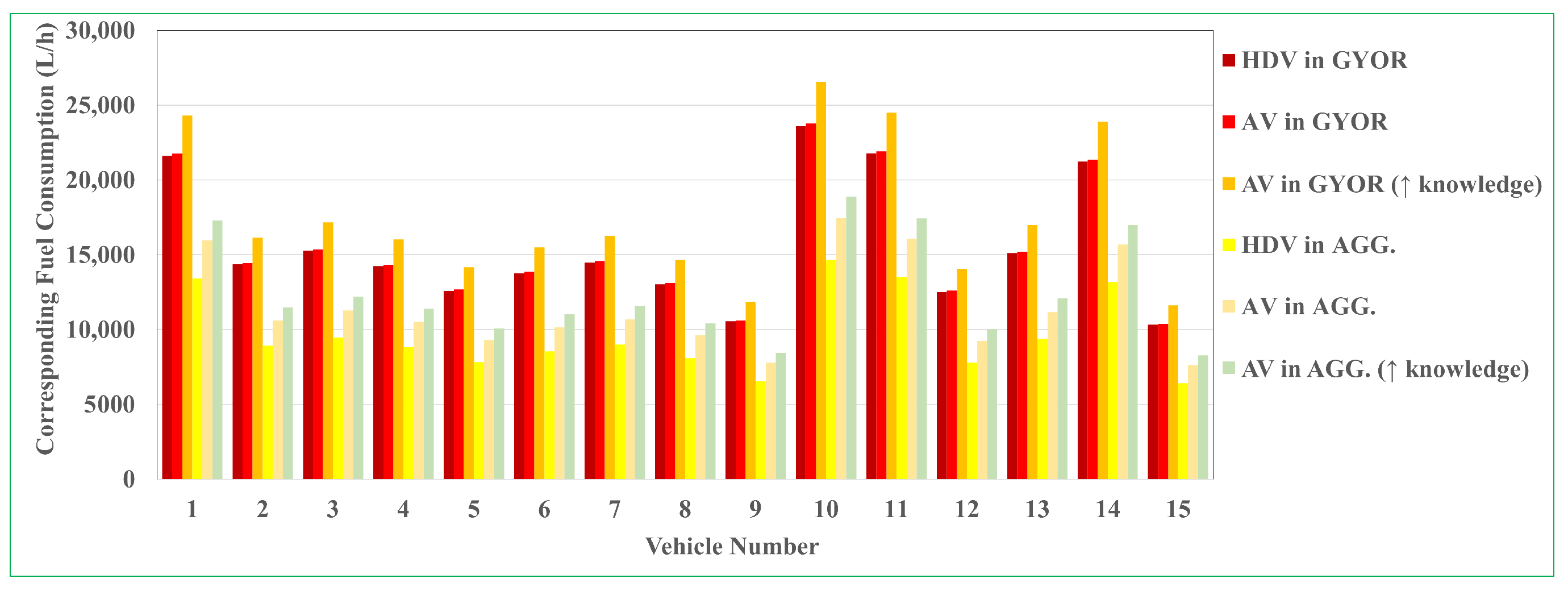
- Travel demand [52]: This research discloses the outcomes of investigating the rise in travel demand attributed to the adoption of AVs. This was achieved through an extensive and densely populated survey conducted in Győr City and the Győr Agglomerations. The questionnaire, administered to a total of 5679 individuals, aimed to collect comprehensive and representative data, shedding light on potential challenges that could affect the sustainability of future transportation systems. The findings of the study indicate a noteworthy surge in the utilization of AVs for commuting in both examined regions.
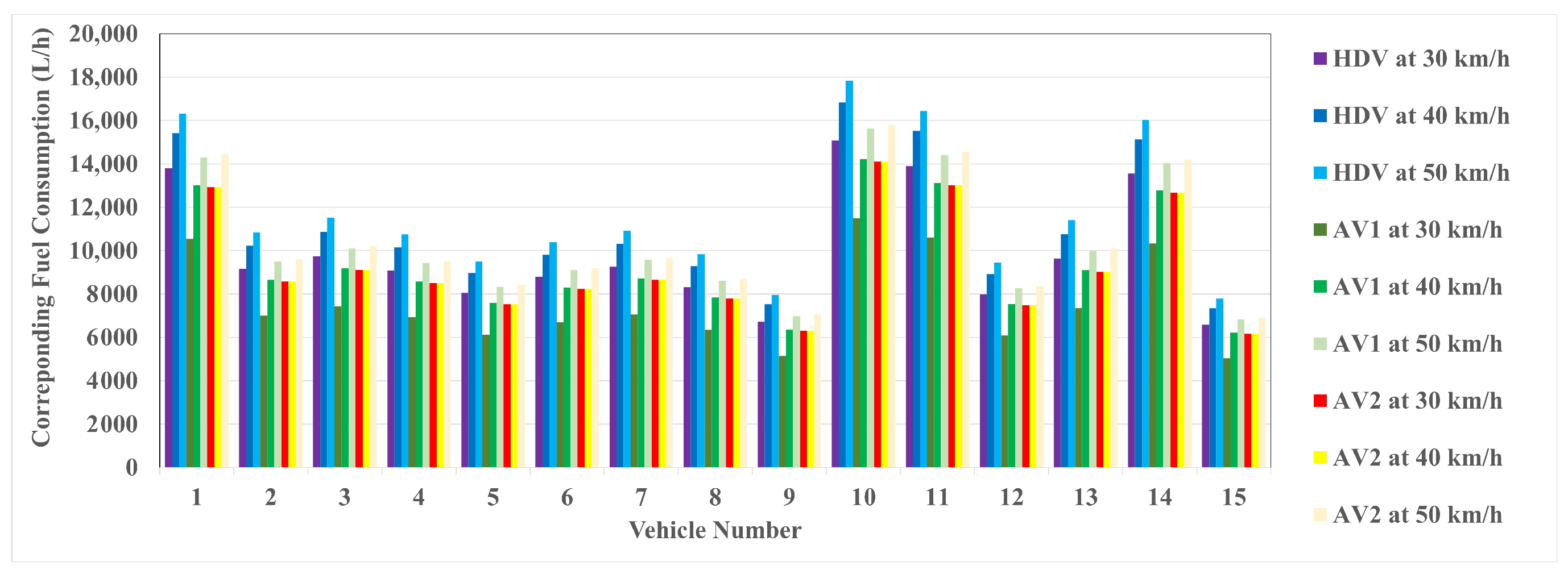
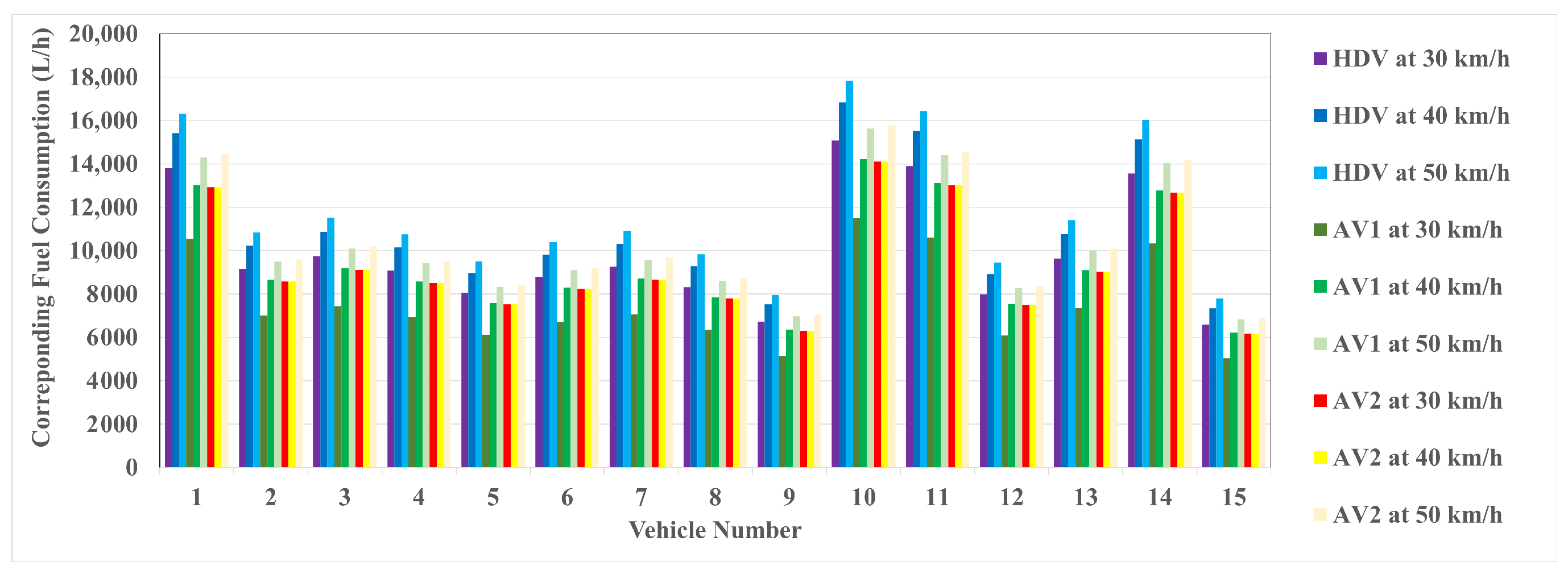
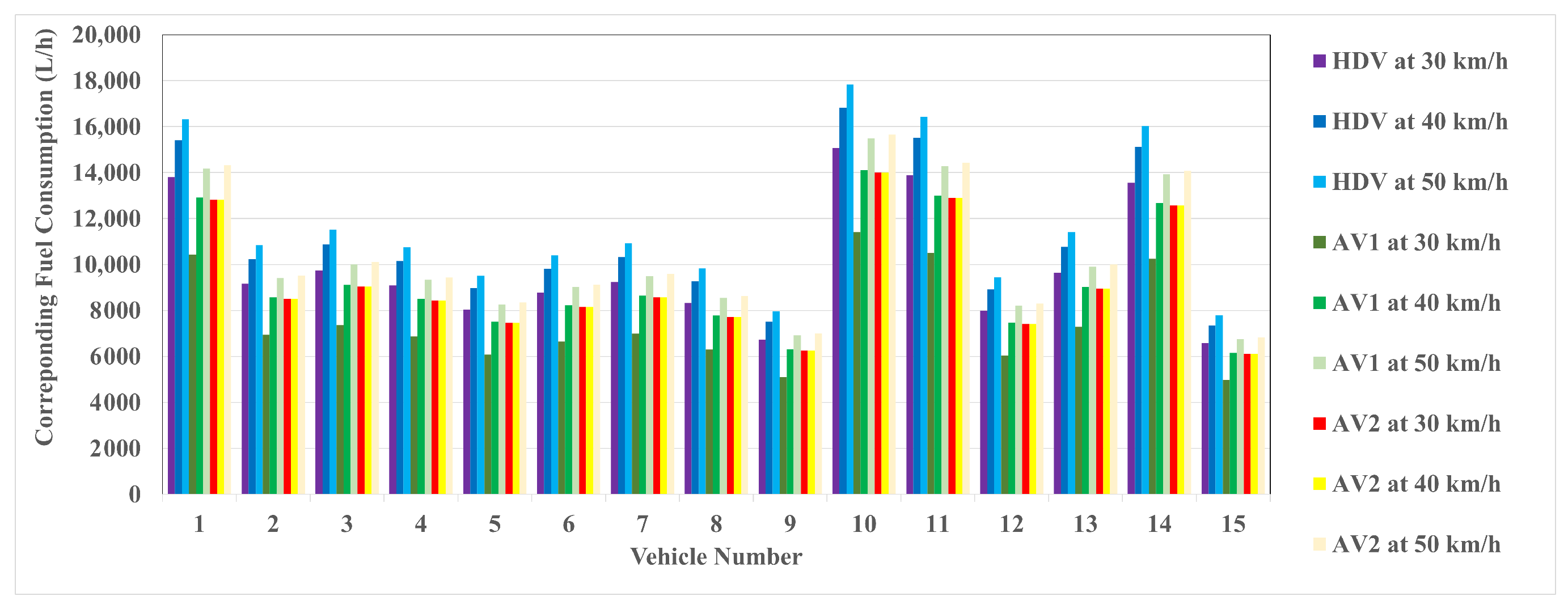
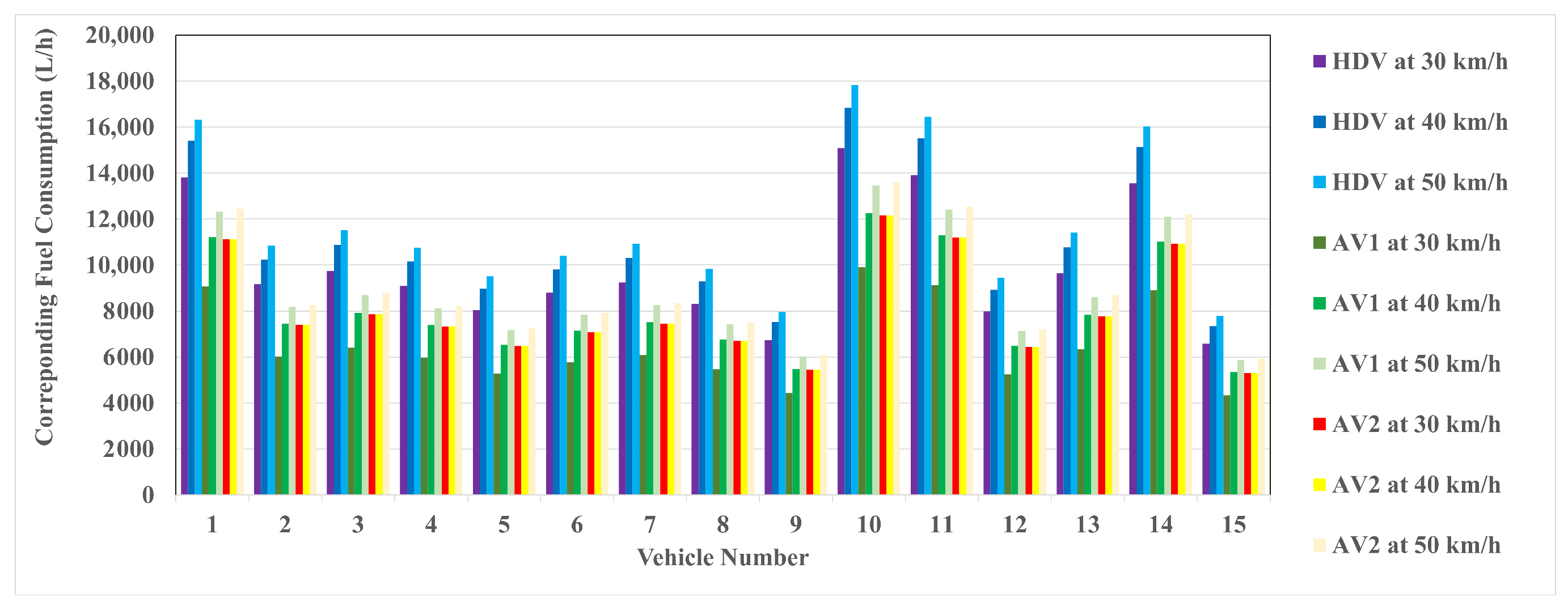
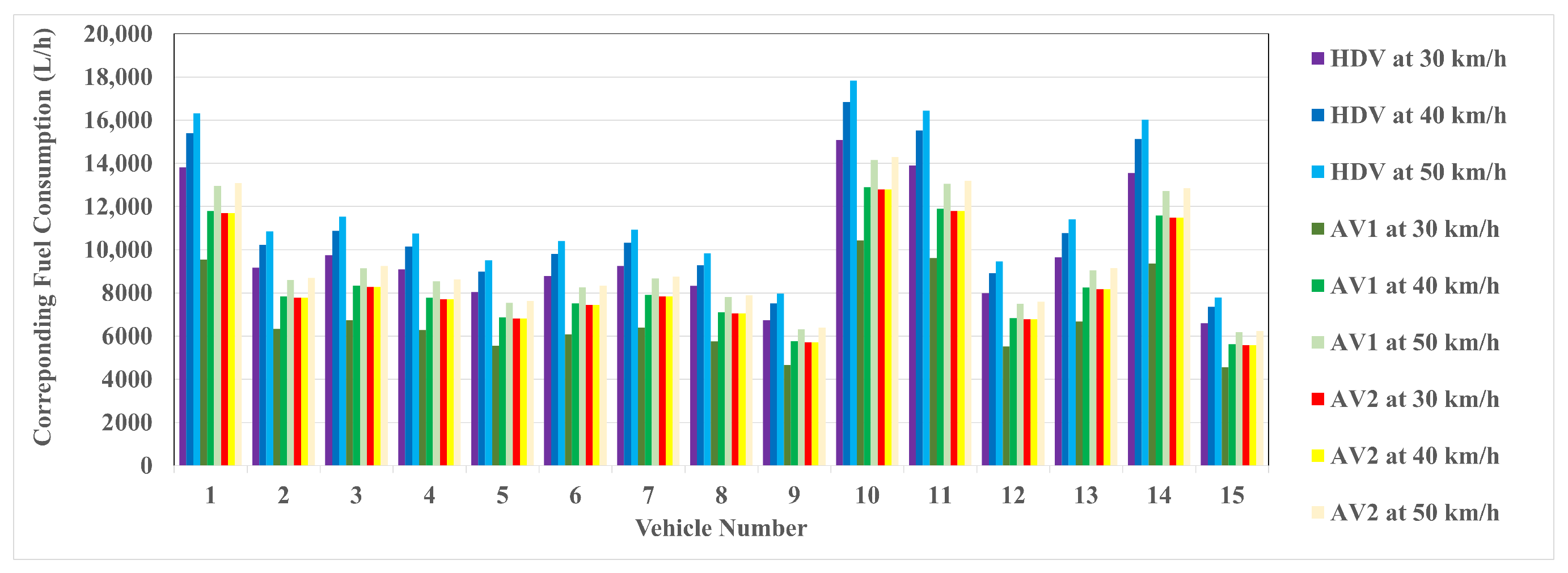
- ACC at steady speeds [53]: This study included empirical tests conducted on the ZalaZONE Proving Ground. The tests included driving at various consistent speeds to assess how well ACC systems can maintain safe distances between vehicles. Our results suggest that ACC systems reliably achieve optimal following distances, showcasing their effectiveness in controlling vehicle spacing. Nevertheless, a significant drawback became apparent in terms of their negative influence on road capacities. The findings reveal a reduction in capacity percentages for the three categories of ACC-equipped vehicles when compared to human drivers.
3. Results
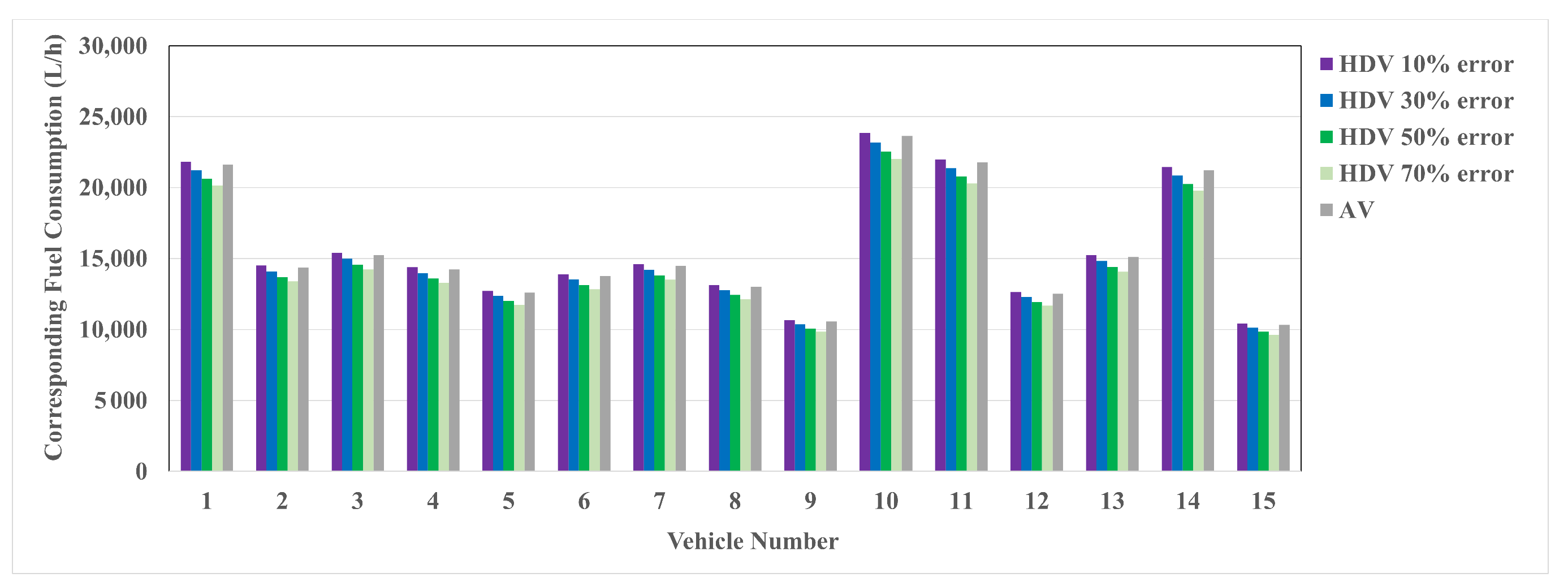
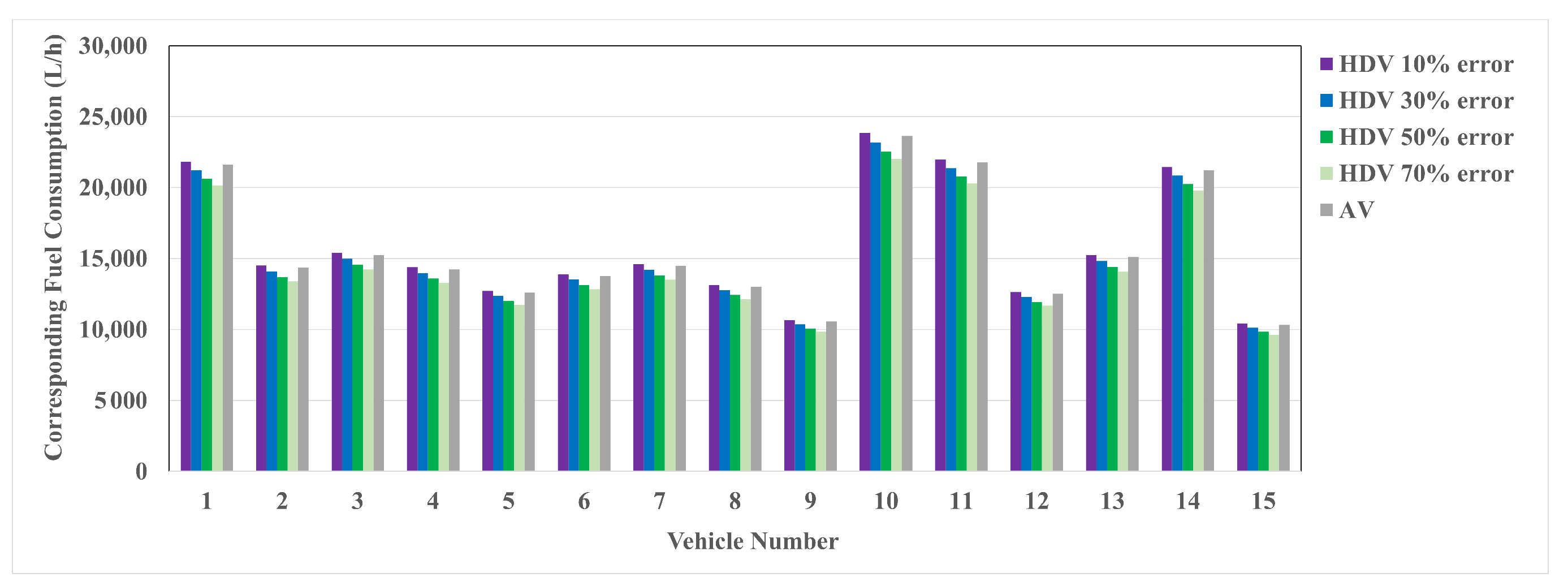
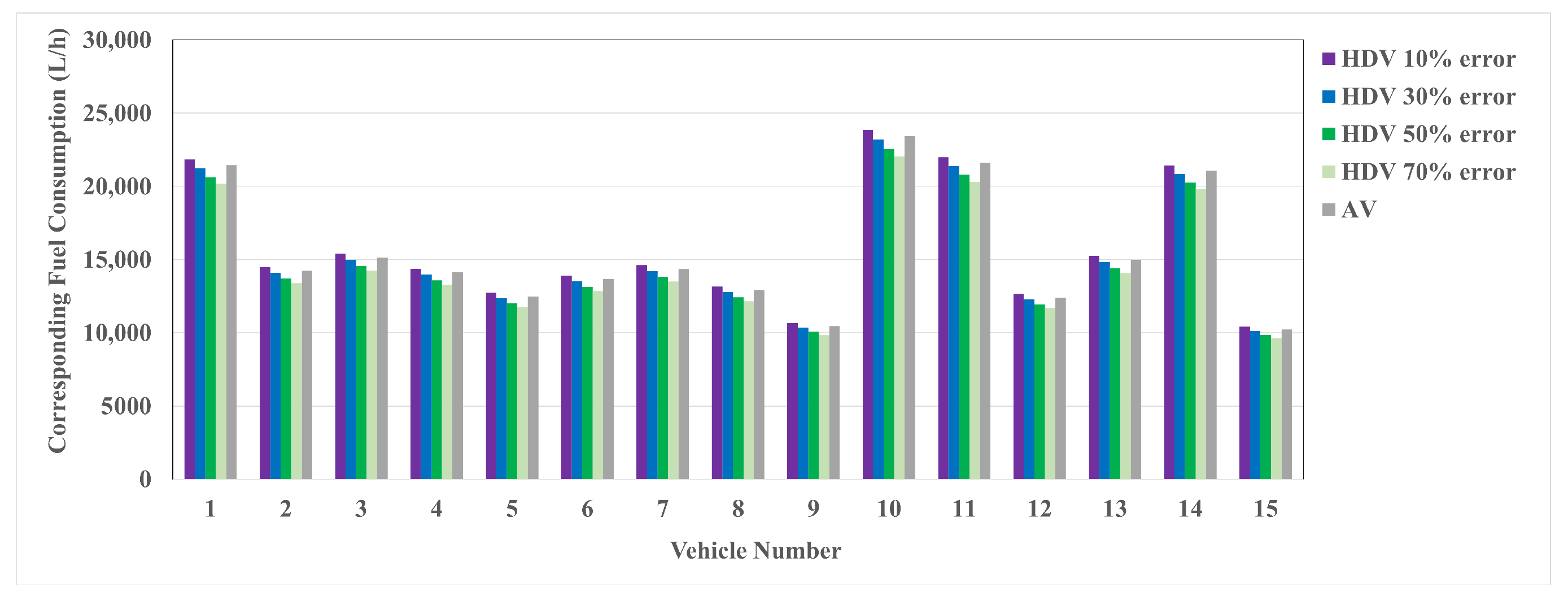
3.1. Total Fuel Consumption with Respect to Diver Behavior
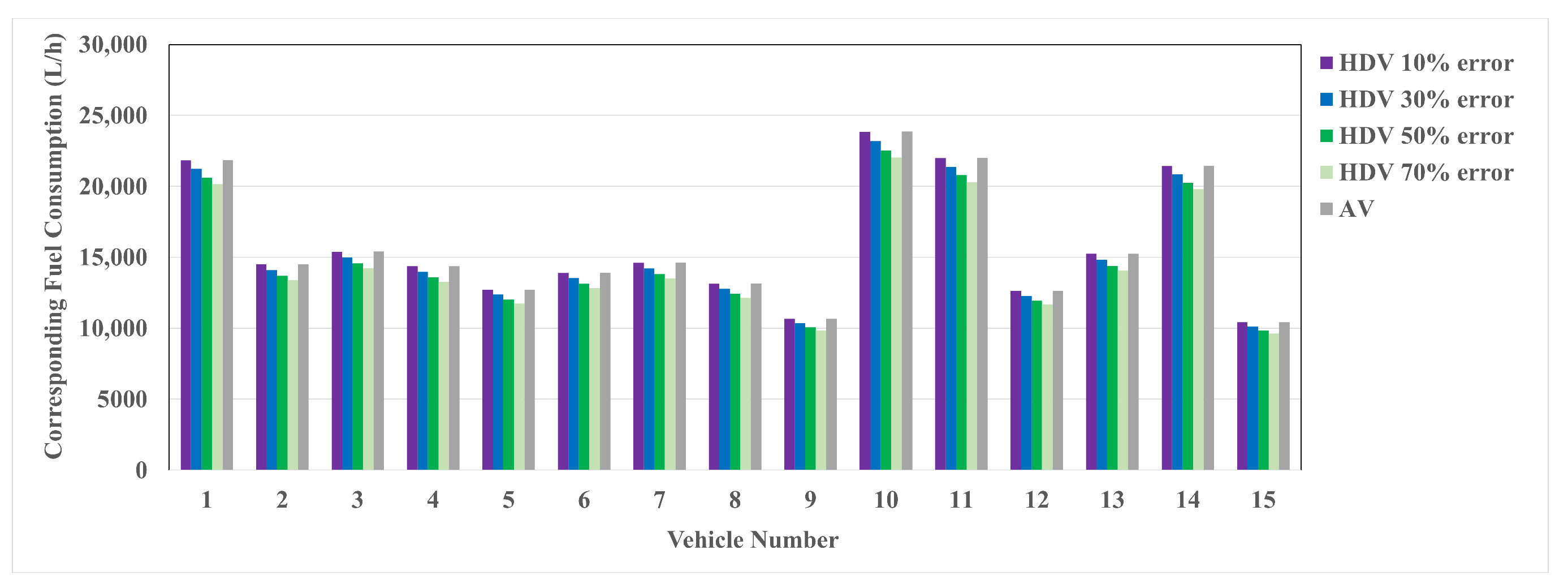
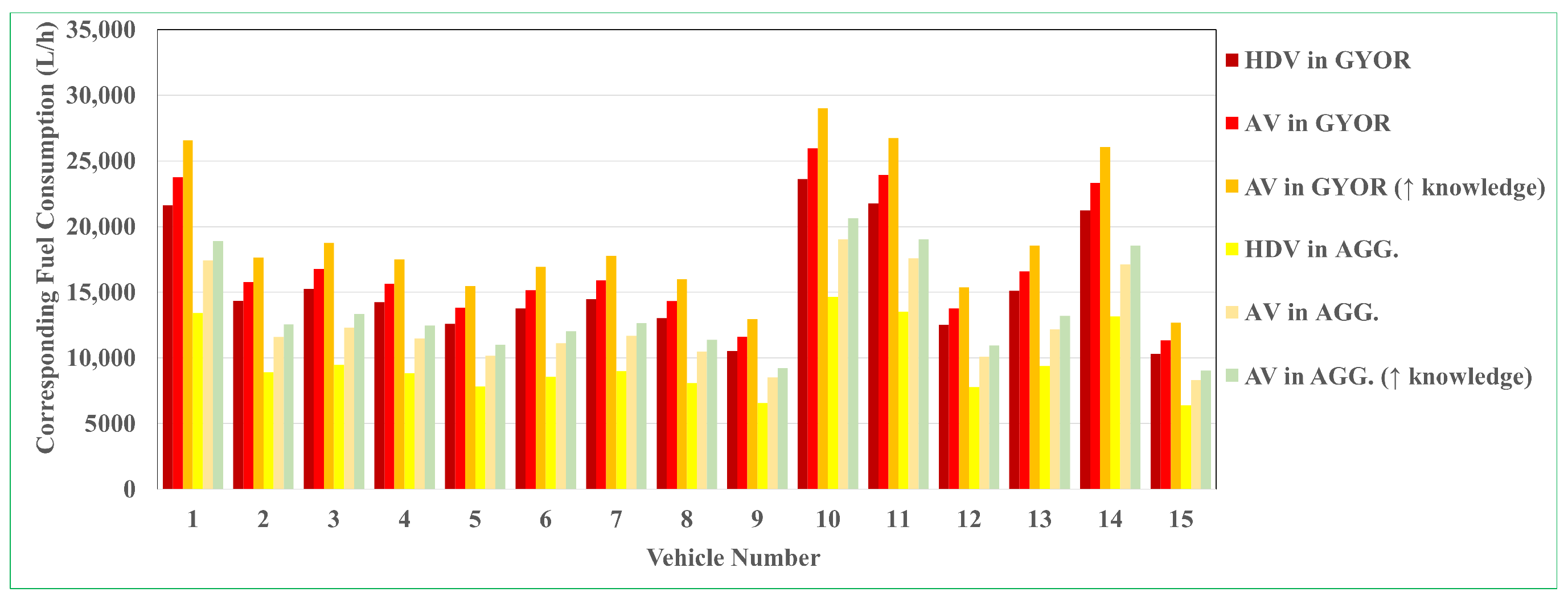
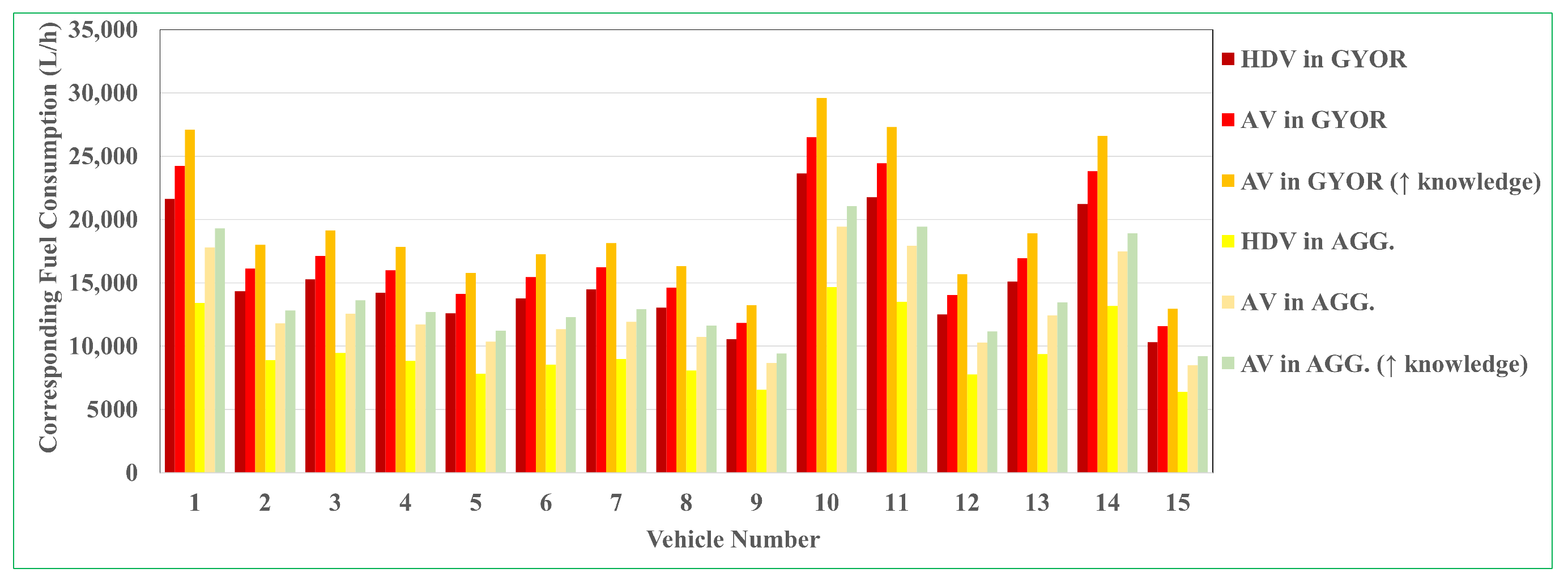
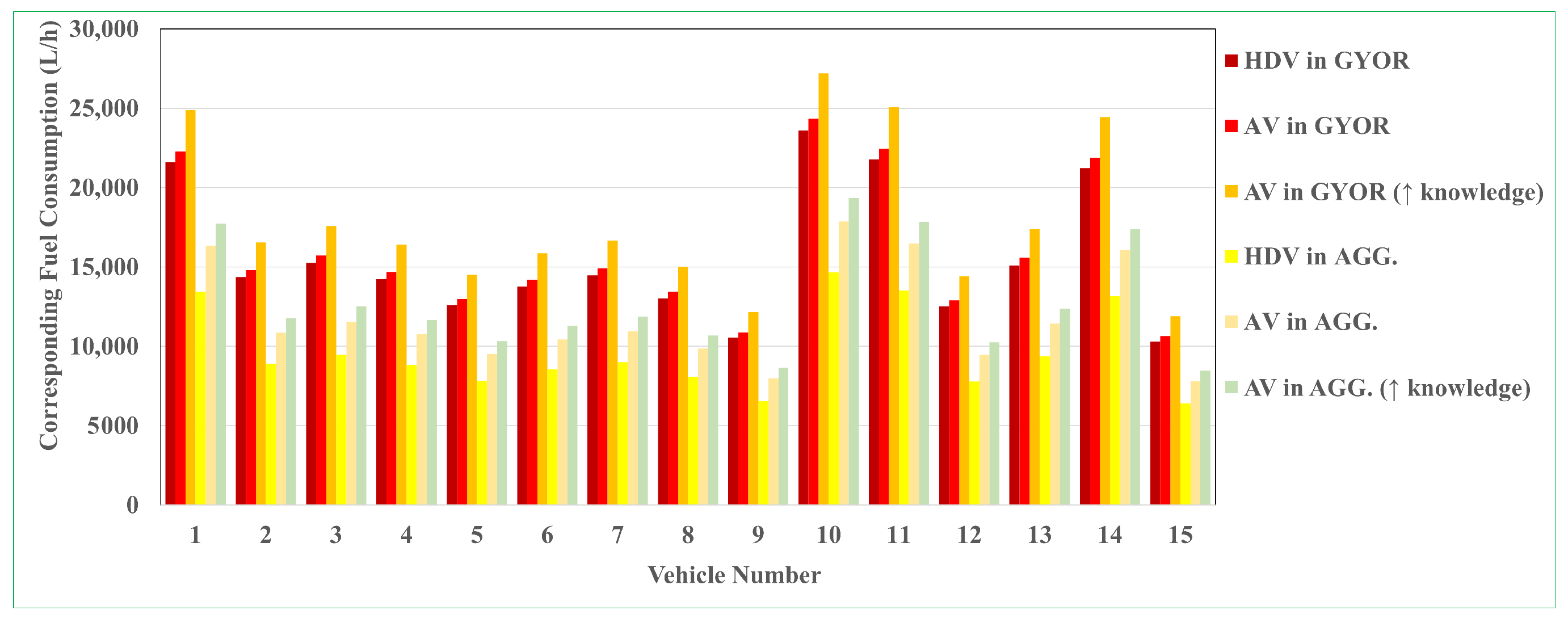
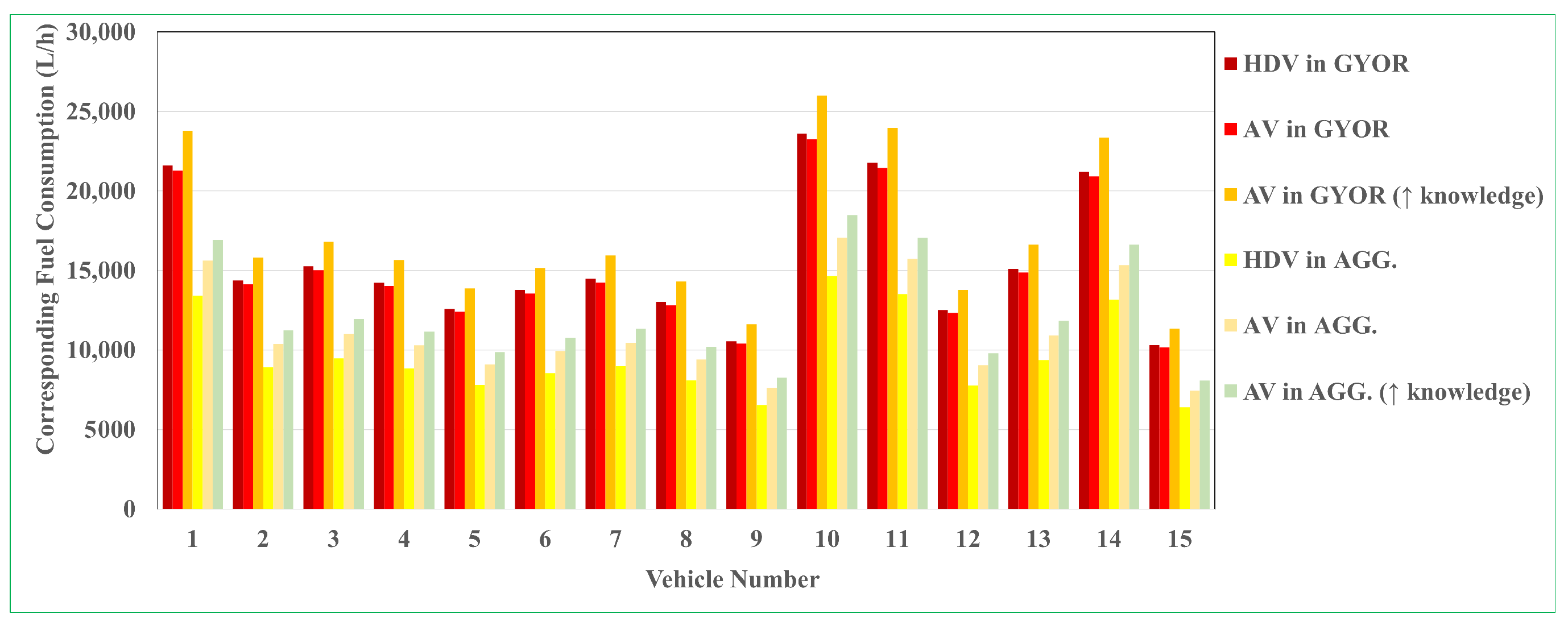
3.2. Total Fuel Consumption with Respect to Travel Demand
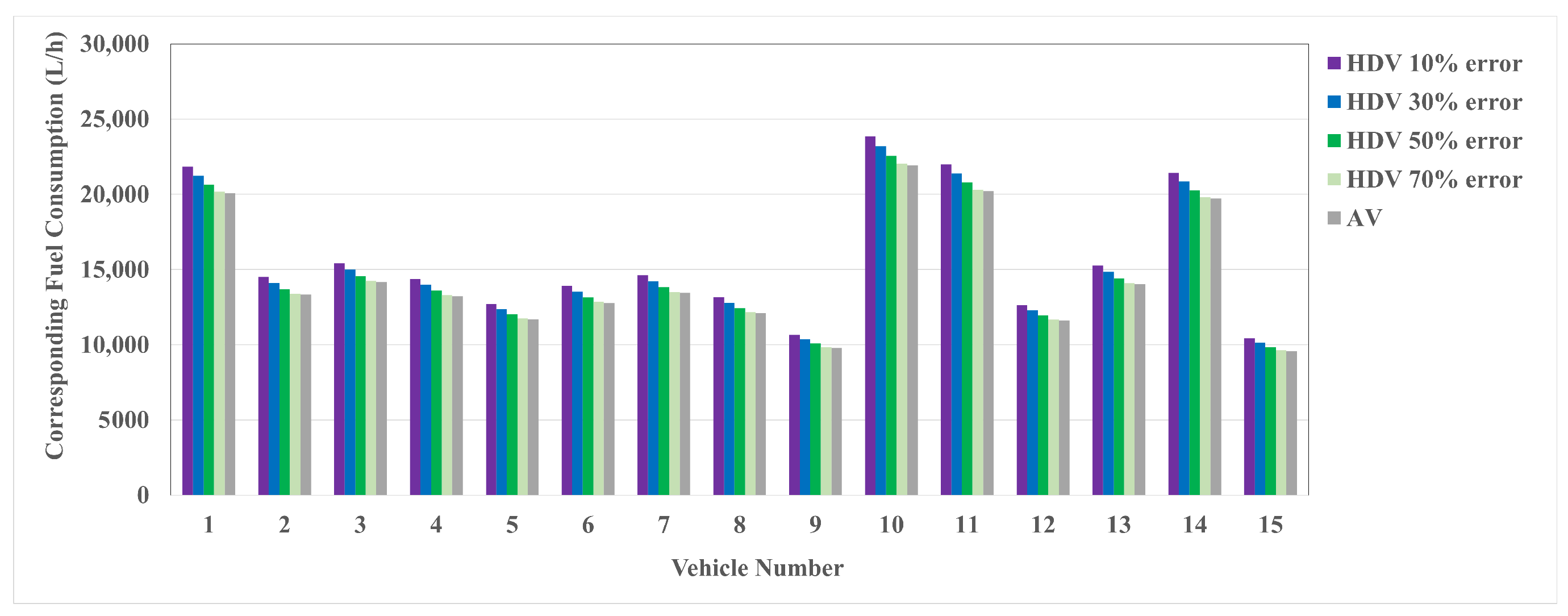
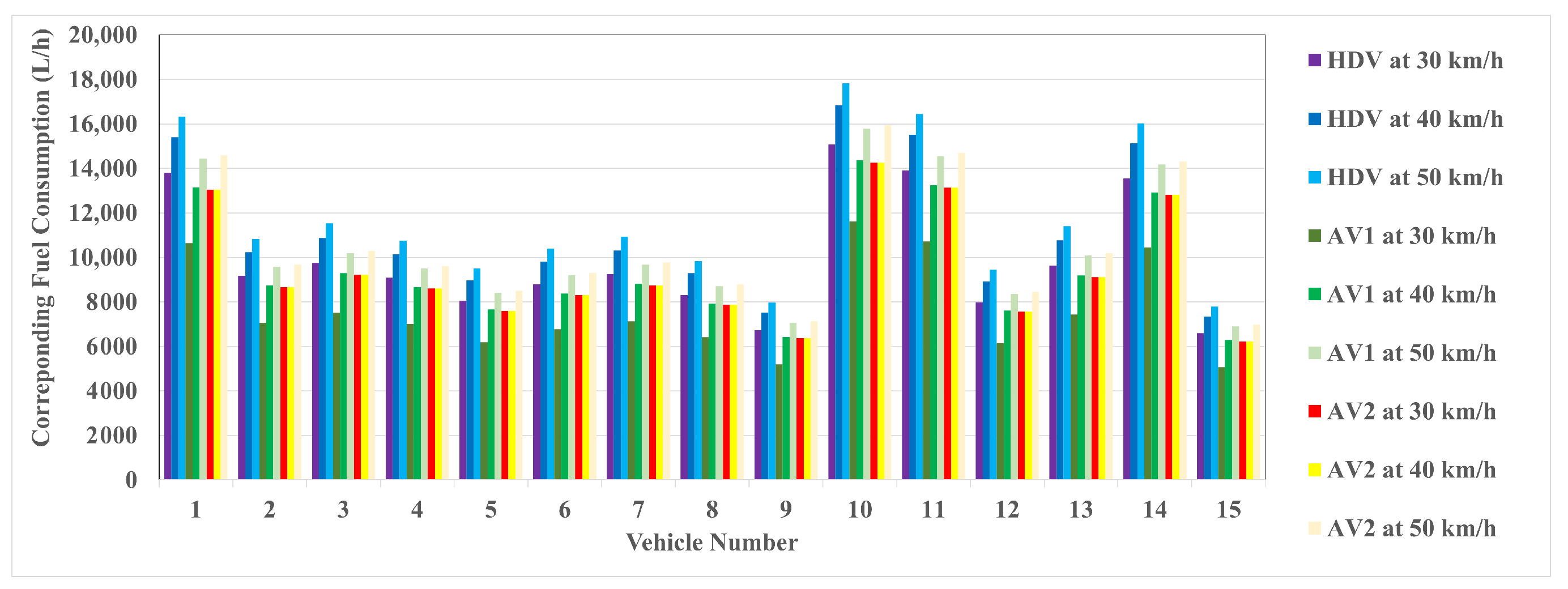
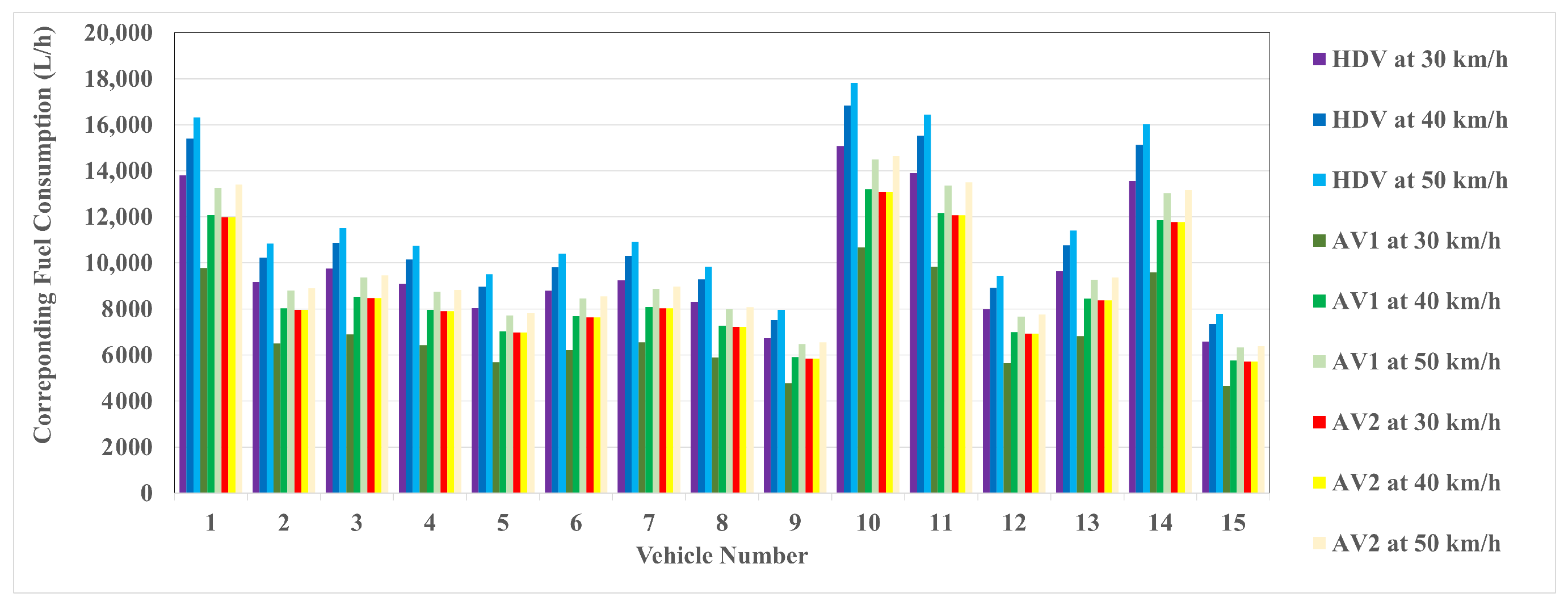
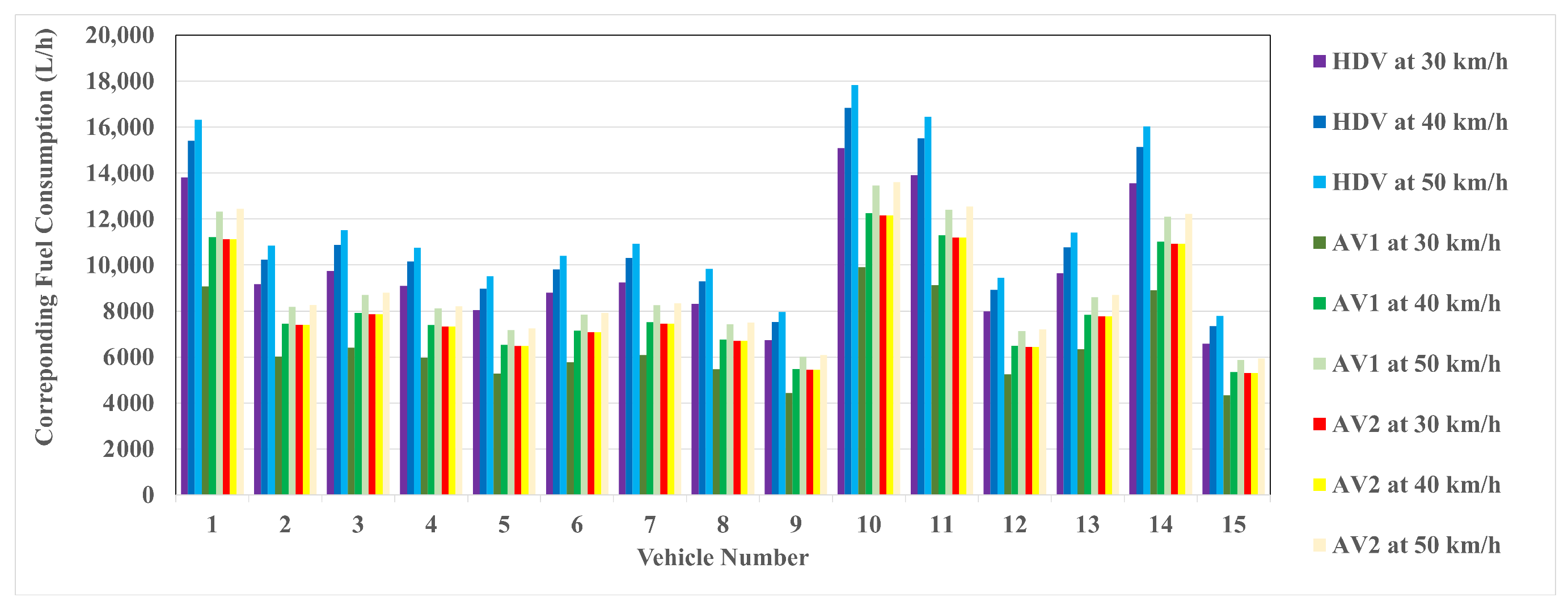
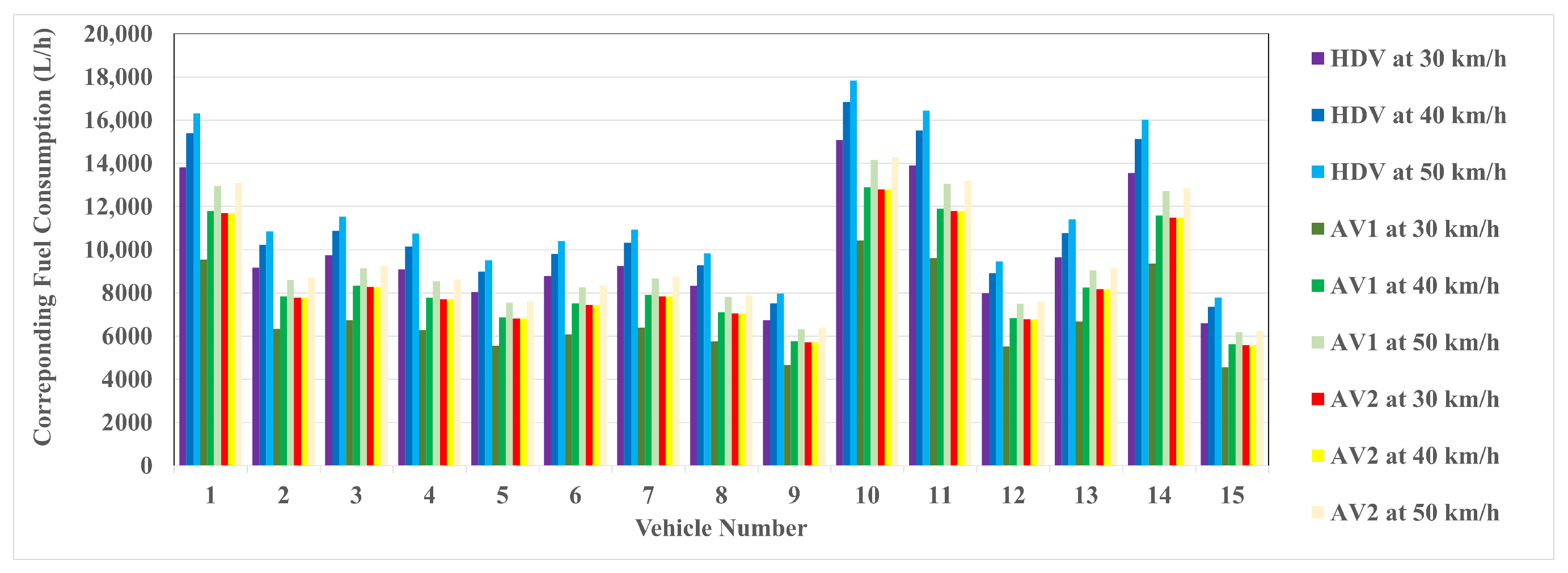
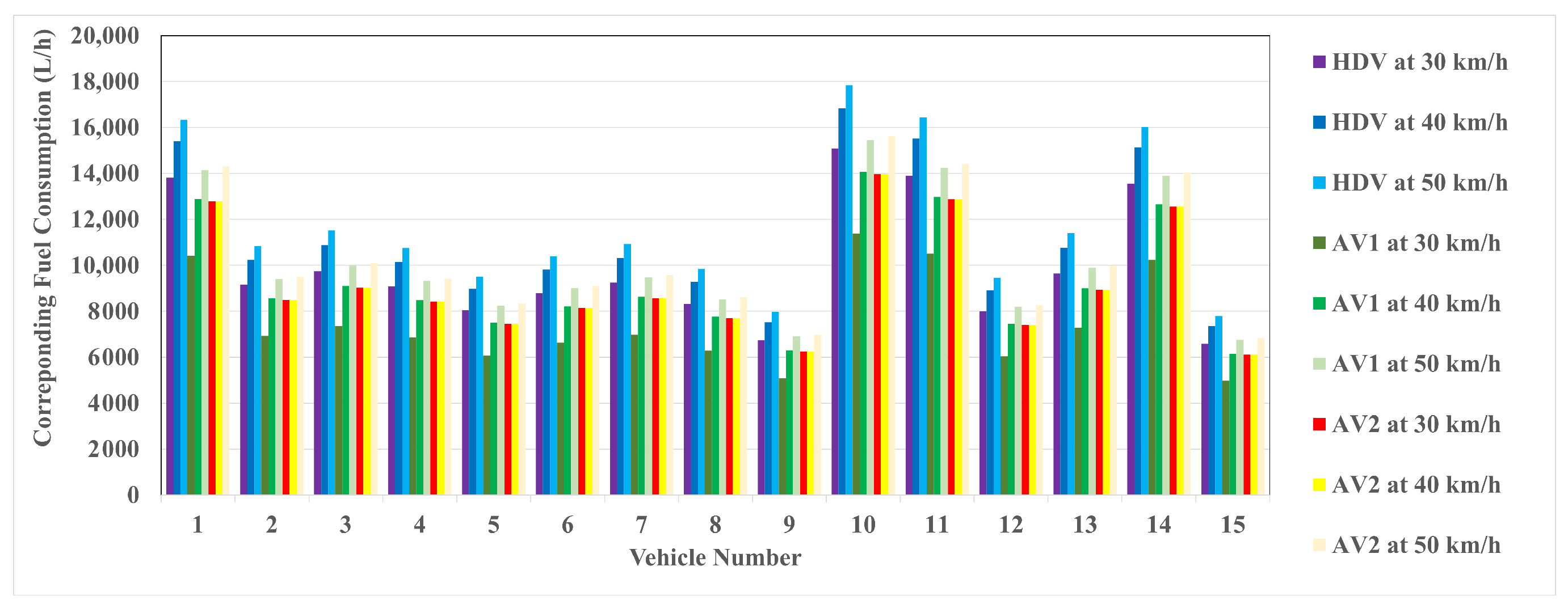
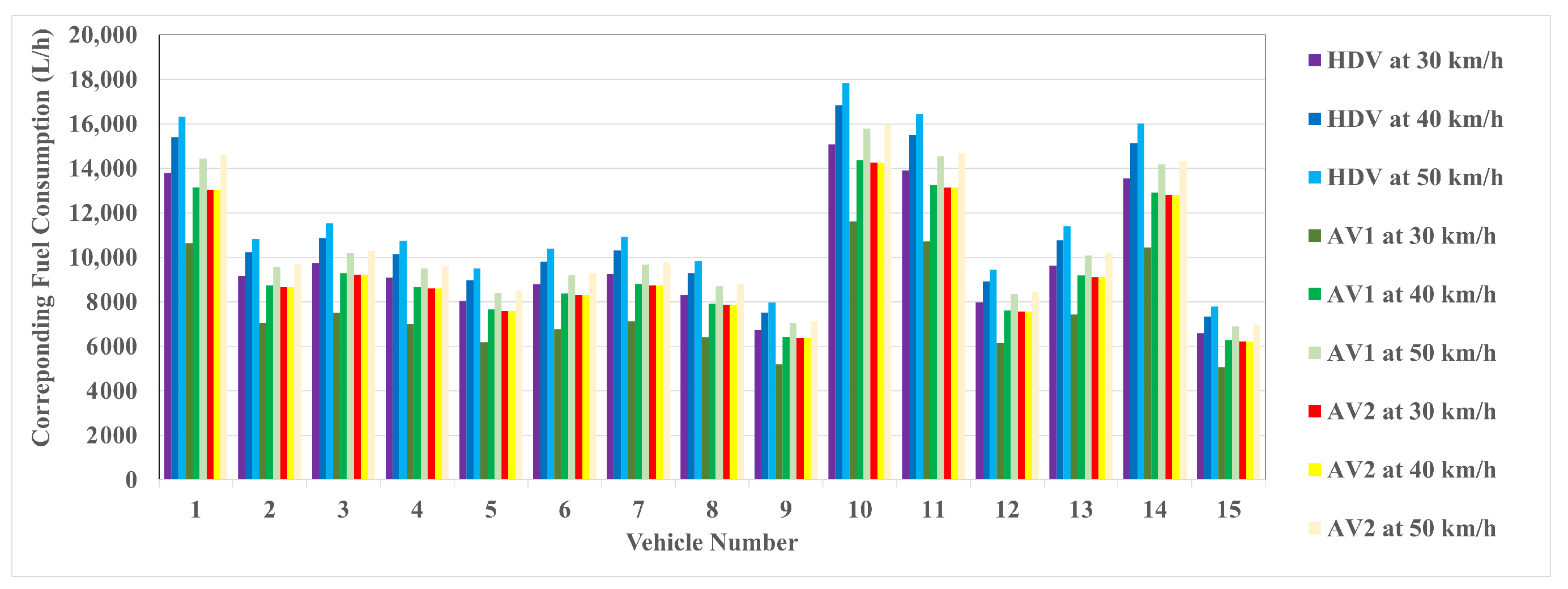
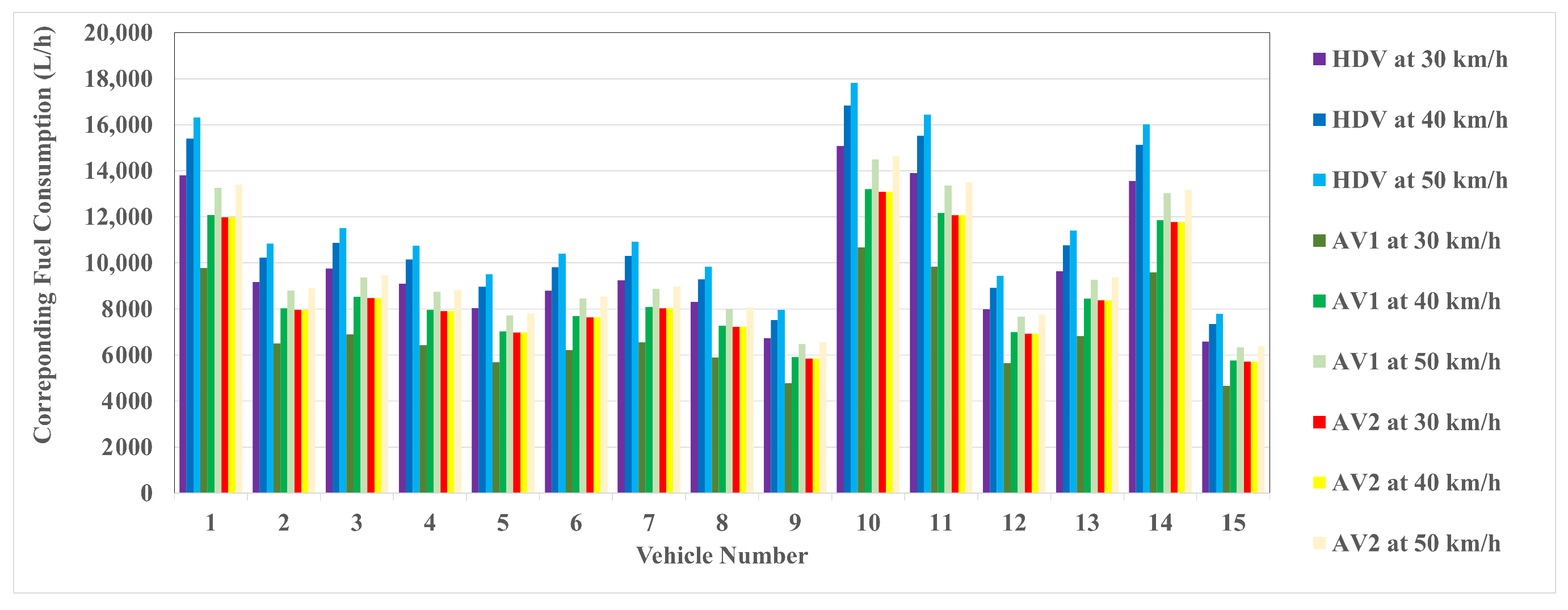
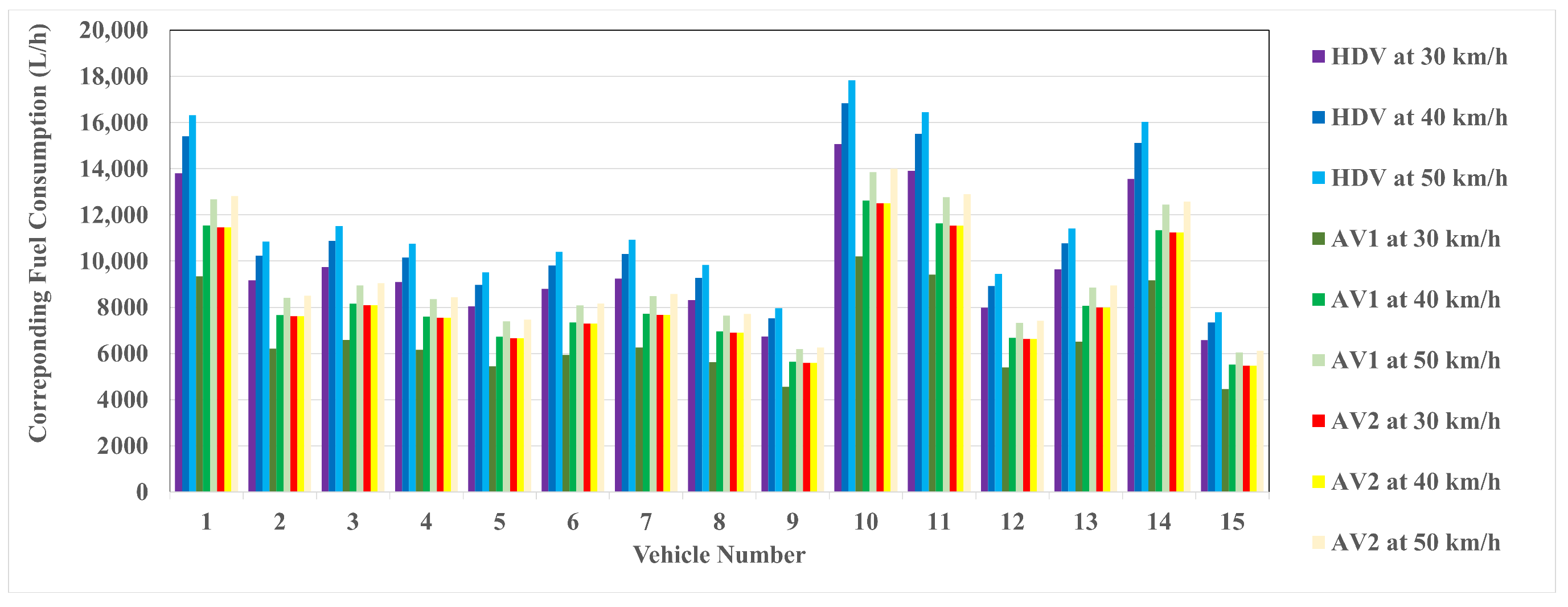
3.3. Total Fuel Consumption with Respect to ACC Performance at Steady Speeds
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AV | Autonomous Vehicle |
| CAV | Connected Autonomous Vehicle |
| OBD | On-Board Diagnostics |
| HDV | Human-Driven Vehicle |
| ACC | Adaptive Cruise Control |
| CACC | Cooperative Adaptive Cruise Control |
| IDM | Intelligent Driver Model |
| EPA | Environmental Protection Agency |
| VSP | Vehicle-Specific Power |
| ECMS | Equivalent Consumption Minimization Strategy |
| HEV | Hybrid Electric Vehicle |
| EIL | Engine In the Loop |
| V2V | Vehicle to Vehicle |
| V2I | Vehicle to Infrastructure |
| EAD | Eco-Approach and Departure |
References
- Wang, Z.; Shi, X.; Li, X. Review of Lane-Changing Maneuvers of Connected and Automated Vehicles: Models, Algorithms and Traffic Impact Analyses. J. Indian Inst. Sci. 2019, 99, 589–599. [Google Scholar] [CrossRef]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Hoogendoorn, R.; van Arerm, B.; Hoogendoom, S. Automated Driving, Traffic Flow Efficiency, and Human Factors: Literature Review. Transp. Res. Rec. 2014, 2422, 113–120. [Google Scholar] [CrossRef]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. Part A Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef]
- Chen, B.; Chen, Y.; Wu, Y.; Xiu, Y.; Fu, X.; Zhang, K. The Effects of Autonomous Vehicles on Traffic Efficiency and Energy Consumption. Systems 2023, 11, 347. [Google Scholar] [CrossRef]
- Sigle, S.; Hahn, R. Energy Assessment of Different Powertrain Options for Heavy-Duty Vehicles and Energy Implications of Autonomous Driving. Energies 2023, 16, 6512. [Google Scholar] [CrossRef]
- Wang, C.; Dai, Y.; Xia, J. A CAV Platoon Control Method for Isolated Intersections: Guaranteed Feasible Multi-Objective Approach with Priority. Energies 2020, 13, 625. [Google Scholar] [CrossRef]
- Heiberg, S.; Emond, E.; Allen, C.; Raya, D.; Gadhamshetty, V.; Dhiman, S.S.; Ravilla, A.; Celik, I. Environmental Impact Assessment of Autonomous Transportation Systems. Energies 2023, 16, 5009. [Google Scholar] [CrossRef]
- Noroozi, M.; Moghaddam, H.R.; Shah, A.; Charkhgard, H.; Sarkar, S.; Das, T.K.; Pohland, T. An AI-Assisted Systematic Literature Review of the Impact of Vehicle Automation on Energy Consumption. IEEE Trans. Intell. Veh. 2023, 8, 3572–3592. [Google Scholar] [CrossRef]
- Carrone, A.P.; Rich, J.; Vandet, C.A.; An, K. Autonomous vehicles in mixed motorway traffic: Capacity utilisation, impact and policy implications. Transportation 2021, 48, 2907–2938. [Google Scholar] [CrossRef]
- Lu, Q.; Tettamanti, T.; Hörcher, D.; Varga, I. The impact of autonomous vehicles on urban traffic network capacity: An experimental analysis by microscopic traffic simulation. Transp. Lett. 2020, 12, 540–549. [Google Scholar] [CrossRef]
- Park, J.E.; Byun, W.; Kim, Y.; Ahn, H.; Shin, D.K. The Impact of Automated Vehicles on Traffic Flow and Road Capacity on Urban Road Networks. J. Adv. Transp. 2021, 2021, 8404951. [Google Scholar] [CrossRef]
- Ramezani, M.; Machado, J.A.; Skabardonis, A.; Geroliminis, N. Capacity and delay analysis of arterials with mixed autonomous and human-driven vehicles. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 280–284. [Google Scholar] [CrossRef]
- Huang, Y.; Ye, Y.; Sun, J.; Tian, Y. Characterizing the Impact of Autonomous Vehicles on Macroscopic Fundamental Diagrams. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6530–6541. [Google Scholar] [CrossRef]
- Almlöf, E.; Nybacka, M.; Pernestål, A.; Jenelius, E. Will leisure trips be more affected than work trips by autonomous technology? Modelling self-driving public transport and cars in Stockholm, Sweden. Transp. Res. Part A Policy Pract. 2022, 165, 1–19. [Google Scholar] [CrossRef]
- Luo, Y.; Xiang, D.; Zhang, S.; Liang, W.; Sun, J.; Zhu, L. Evaluation on the Fuel Economy of Automated Vehicles with Data-Driven Simulation Method. Energy AI 2021, 3, 100051. [Google Scholar] [CrossRef]
- Qian, G.; Chung, E. Evaluating effects of eco-driving at traffic intersections based on traffic micro-simulation. In Proceedings of the 34th Australasian Transport Research Forum, Adelaide, Australia, 28–30 September 2011; pp. 1–11. [Google Scholar]
- Mersky, A.C.; Samaras, C. Fuel economy testing of autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 65, 31–48. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.W.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, G.; Ou, B. A fuel economy optimization system with applications in vehicles with human drivers and autonomous vehicles. Transp. Res. Part D Transp. Environ. 2011, 16, 515–524. [Google Scholar] [CrossRef]
- Chen, Y.; Gonder, J.; Young, S.; Wood, E. Quantifying autonomous vehicles national fuel consumption impacts: A data-rich approach. Transp. Res. Part A Policy Pract. 2019, 122, 134–145. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Haulcy, R.; Pohlmann, H.; Wu, F.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef]
- Sivakumar, R.; Mangalam, H. Ensemble hill climbing optimization in adaptive cruise control for safe automated vehicle transportation. J. Supercomput. 2020, 76, 5780–5800. [Google Scholar] [CrossRef]
- Charness, N.; Yoon, J.S.; Souders, D.; Stothart, C.; Yehnert, C. Predictors of Attitudes Toward Autonomous Vehicles: The Roles of Age, Gender, Prior Knowledge, and Personality. Front. Psychol. 2018, 9, 2589. [Google Scholar] [CrossRef] [PubMed]
- Pourabdollah, M.; Bjärkvik, E.; Fürer, F.; Lindenberg, B.; Burgdorf, K. Fuel economy assessment of semi-autonomous vehicles using measured data. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 761–766. [Google Scholar] [CrossRef]
- Ozkan, M.F.; Ma, Y. Eco-Driving of Connected and Automated Vehicle With Preceding Driver Behavior Prediction. J. Dyn. Syst. Meas. Control 2020, 143, 011002. [Google Scholar] [CrossRef]
- Ahmed, H.U.; Huang, Y.; Lu, P. A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation. Smart Cities 2021, 4, 19. [Google Scholar] [CrossRef]
- Huang, J.; Song, G.; He, F.; Tan, Z. Energetic Impacts of Autonomous Vehicles in Real-World Traffic Conditions From Nine Open-Source Datasets. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9901–9914. [Google Scholar] [CrossRef]
- Zhu, L.; Gonder, J.; Bjarkvik, E.; Pourabdollah, M.; Lindenberg, B. An Automated Vehicle Fuel Economy Benefits Evaluation Framework Using Real-World Travel and Traffic Data. IEEE Intell. Transp. Syst. Mag. 2019, 11, 29–41. [Google Scholar] [CrossRef]
- Khosravinia, K.; Wang, S.; Lin, X. Eco-Driving Control of Connected and Automated Hybrid Electric Vehicles on Multi-lane Roads Using Model Predictive Control. SAE Int. J. Adv. Curr. Pract. Mobil. 2021, 3, 1748–1756. [Google Scholar] [CrossRef]
- Duarte, G.; Gonçalves, G.; Baptista, P.; Farias, T. Establishing bonds between vehicle certification data and real-world vehicle fuel consumption—A Vehicle Specific Power approach. Energy Convers. Manag. 2015, 92, 251–265. [Google Scholar] [CrossRef]
- Shi, X.; Yao, H.; Liang, Z.; Li, X. An empirical study on fuel consumption of commercial automated vehicles. Transp. Res. Part D Transp. Environ. 2022, 106, 103253. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, T.; Peng, K.; Zhao, X.; Xu, Z. Can Autonomous Vehicles Save Fuel? Findings from Field Experiments. J. Adv. Transp. 2022, 2022, 2631692. [Google Scholar] [CrossRef]
- He, Y.; Makridis, M.; Fontaras, G.; Mattas, K.; Xu, H.; Ciuffo, B. The energy impact of adaptive cruise control in real-world highway multiple-car-following scenarios. Eur. Transp. Res. Rev. 2020, 12, 17. [Google Scholar] [CrossRef]
- Song, M.; Chen, F.; Ma, X. Organization of autonomous truck platoon considering energy saving and pavement fatigue. Transp. Res. Part D Transp. Environ. 2021, 90, 102667. [Google Scholar] [CrossRef]
- van de Hoef, S.; Johansson, K.H.; Dimarogonas, D.V. Fuel-Efficient En Route Formation of Truck Platoons. IEEE Trans. Intell. Transp. Syst. 2018, 19, 102–112. [Google Scholar] [CrossRef]
- Yang, X.T.; Huang, K.; Zhang, Z.; Zhang, Z.A.; Lin, F. Eco-Driving System for Connected Automated Vehicles: Multi-Objective Trajectory Optimization. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7837–7849. [Google Scholar] [CrossRef]
- Tsugawa, S. An Overview on an Automated Truck Platoon within the Energy ITS Project. IFAC Proc. Vol. 2013, 46, 41–46. [Google Scholar] [CrossRef]
- Lu, X.Y.; Shladover, S.E. Automated Truck Platoon Control and Field Test. In Road Vehicle Automation; Springer International Publishing: Cham, Switzerland, 2014; pp. 247–261. [Google Scholar] [CrossRef]
- Ko, Y.D.; Song, B.D.; Oh, Y. Mathematical Analysis of Environmental Effects of Forming a Platoon of Smart Vehicles. Sustainability 2019, 11, 571. [Google Scholar] [CrossRef]
- Ciuffo, B.; Makridis, M.; Toledo, T.; Fontaras, G. Capability of Current Car-Following Models to Reproduce Vehicle Free-Flow Acceleration Dynamics. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3594–3603. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, R.; Wu, X. Estimating Bounds of Aerodynamic, Mass, and Auxiliary Load Impacts on Autonomous Vehicles: A Powertrain Simulation Approach. Sustainability 2021, 13, 12405. [Google Scholar] [CrossRef]
- Huang, C.; Salehi, R.; Ersal, T.; Stefanopoulou, A.G. An energy and emission conscious adaptive cruise controller for a connected automated diesel truck. Veh. Syst. Dyn. 2020, 58, 805–825. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Langari, R.; Wang, L.; Cui, Y.; Pang, H. Adaptive energy management in automated hybrid electric vehicles with flexible torque request. Energy 2021, 214, 118873. [Google Scholar] [CrossRef]
- Xu, C.; Groelke, B.; Alvarez Tiburcio, M.; Earnhardt, C.; Borek, J.; Pelletier, E.; Boyle, S.; Huynh, B.; Wahba, M.; Geyer, S.; et al. Engine-in-the-Loop Study of a Hierarchical Predictive Online Controller for Connected and Automated Heavy-Duty Vehicles. In Proceedings of the WCX SAE World Congress Experience, Virtually, 16–18 June 2020. [Google Scholar] [CrossRef]
- Nie, Z.; Jia, Y.; Wang, W.; Outbib, R. Eco-Co-Optimization strategy for connected and automated fuel cell hybrid vehicles in dynamic urban traffic settings. Energy Convers. Manag. 2022, 263, 115690. [Google Scholar] [CrossRef]
- Shao, Y.; Sun, Z. Eco-Approach With Traffic Prediction and Experimental Validation for Connected and Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1562–1572. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, T.; Zou, Y.; Du, G.; Guo, N. Predictive Eco-Driving Application Considering Real-World Traffic Flow. IEEE Access 2020, 8, 82187–82200. [Google Scholar] [CrossRef]
- Du, Z.; HomChaudhuri, B.; Pisu, P. Hierarchical distributed coordination strategy of connected and automated vehicles at multiple intersections. J. Intell. Transp. Syst. 2018, 22, 144–158. [Google Scholar] [CrossRef]
- Jiang, H.; Hu, J.; An, S.; Wang, M.; Park, B.B. Eco approaching at an isolated signalized intersection under partially connected and automated vehicles environment. Transp. Res. Part C Emerg. Technol. 2017, 79, 290–307. [Google Scholar] [CrossRef]
- Mohammed, D.; Horváth, B. Effect of Different Driver Behaviour Parameters in Microsimulation Model. In Proceedings of the XX. European Transport Congress, Győr, Hungary, 9–10 June 2022; pp. 64–71. [Google Scholar]
- Mohammed, D.; Horváth, B. Travel Demand Increment Due to the Use of Autonomous Vehicles. Sustainability 2023, 15, 8937. [Google Scholar] [CrossRef]
- Mohammed, D.; Horváth, B. Steady-Speed Traffic Capacity Analysis for Autonomous and Human-Driven Vehicles. Appl. Sci. 2024, 14, 337. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Number | Year | Make | Model |
|---|---|---|---|
| 1 | 2013 | Chevrolet | Silverado |
| 2 | 2013 | Dodge | Grand Caravan |
| 3 | 2015 | Chevrolet | Malibu |
| 4 | 2012 | Chevrolet | Malibu |
| 5 | 2012 | Dodge | Grand Caravan |
| 6 | 2014 | Chevrolet | Malibu |
| 7 | 2016 | Chevrolet | Malibu |
| 8 | 2013 | Chevrolet | Impala |
| 9 | 2016 | Chevrolet | Malibu Limited |
| 10 | 2015 | Chevrolet | Suburban |
| 11 | 2014 | Chevrolet | Silverado |
| 12 | 2014 | Dodge | Grand Caravan |
| 13 | 2016 | Dodge | Grand Caravan |
| 14 | 2016 | Chevrolet | Suburban |
| 15 | 2009 | Ford | Escape Hybrid |
| Nr. | HDV | (AV) Car-Following | (AV) Platooning | (AV) Powertrain | (AV) Int. Control | ||||
|---|---|---|---|---|---|---|---|---|---|
| 3% | 10% | 3.8% | 14% | 4% | 16.42% | 2.02% | 12.1% | ||
| 1 | 5.51 | 5.34 | 4.96 | 5.30 | 4.74 | 5.29 | 4.61 | 5.40 | 4.84 |
| 2 | 3.66 | 3.55 | 3.29 | 3.52 | 3.15 | 3.51 | 3.06 | 3.59 | 3.22 |
| 3 | 3.89 | 3.77 | 3.50 | 3.74 | 3.35 | 3.73 | 3.25 | 3.81 | 3.42 |
| 4 | 3.63 | 3.52 | 3.27 | 3.49 | 3.12 | 3.48 | 3.03 | 3.56 | 3.19 |
| 5 | 3.21 | 3.11 | 2.89 | 3.09 | 2.76 | 3.08 | 2.68 | 3.15 | 2.82 |
| 6 | 3.51 | 3.40 | 3.16 | 3.38 | 3.02 | 3.37 | 2.93 | 3.44 | 3.09 |
| 7 | 3.69 | 3.58 | 3.32 | 3.55 | 3.17 | 3.54 | 3.08 | 3.62 | 3.24 |
| 8 | 3.32 | 3.22 | 2.99 | 3.19 | 2.86 | 3.19 | 2.77 | 3.25 | 2.92 |
| 9 | 2.69 | 2.61 | 2.42 | 2.59 | 2.31 | 2.58 | 2.25 | 2.64 | 2.36 |
| 10 | 6.02 | 5.84 | 5.42 | 5.79 | 5.18 | 5.78 | 5.03 | 5.90 | 5.29 |
| 11 | 5.55 | 5.38 | 5.00 | 5.34 | 4.77 | 5.33 | 4.64 | 5.44 | 4.88 |
| 12 | 3.19 | 3.09 | 2.87 | 3.07 | 2.74 | 3.06 | 2.67 | 3.13 | 2.80 |
| 13 | 3.85 | 3.73 | 3.47 | 3.70 | 3.31 | 3.70 | 3.22 | 3.77 | 3.38 |
| 14 | 5.41 | 5.25 | 4.87 | 5.20 | 4.65 | 5.19 | 4.52 | 5.30 | 4.76 |
| 15 | 2.63 | 2.55 | 2.37 | 2.53 | 2.26 | 2.52 | 2.20 | 2.58 | 2.31 |
| Human Driver Error | 10% | 30% | 50% | 70% |
|---|---|---|---|---|
| HDV | 3962 | 3853 | 3745 | 3660 |
| AV | 4047 | 4047 | 4047 | 4047 |
| Travel Mode | Győr City | Agglomeration |
|---|---|---|
| Current trips by HDVs | 3923 | 2436 |
| Future trips by AVs | 4493 | 2397 |
| Future trips by AVs with increased knowledge about AVs | 5021 | 3573 |
| Driving Speed | 30 km/h | 40 km/h | 50 km/h |
|---|---|---|---|
| HDV | 2505 | 2796 | 2962 |
| AV1 | 1970 | 2436 | 2675 |
| AV2 | 2417 | 2417 | 2703 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, D.; Horváth, B. Assessing the Paradox of Autonomous Vehicles: Promised Fuel Efficiency vs. Aggregate Fuel Consumption. Energies 2024, 17, 1589. https://doi.org/10.3390/en17071589
Mohammed D, Horváth B. Assessing the Paradox of Autonomous Vehicles: Promised Fuel Efficiency vs. Aggregate Fuel Consumption. Energies. 2024; 17(7):1589. https://doi.org/10.3390/en17071589
Chicago/Turabian StyleMohammed, Dilshad, and Balázs Horváth. 2024. "Assessing the Paradox of Autonomous Vehicles: Promised Fuel Efficiency vs. Aggregate Fuel Consumption" Energies 17, no. 7: 1589. https://doi.org/10.3390/en17071589
APA StyleMohammed, D., & Horváth, B. (2024). Assessing the Paradox of Autonomous Vehicles: Promised Fuel Efficiency vs. Aggregate Fuel Consumption. Energies, 17(7), 1589. https://doi.org/10.3390/en17071589