
Adjustment of Proportional Control Valve Characteristics via Pressure Compensation Using Flow Forces



Abstract
1. Introduction
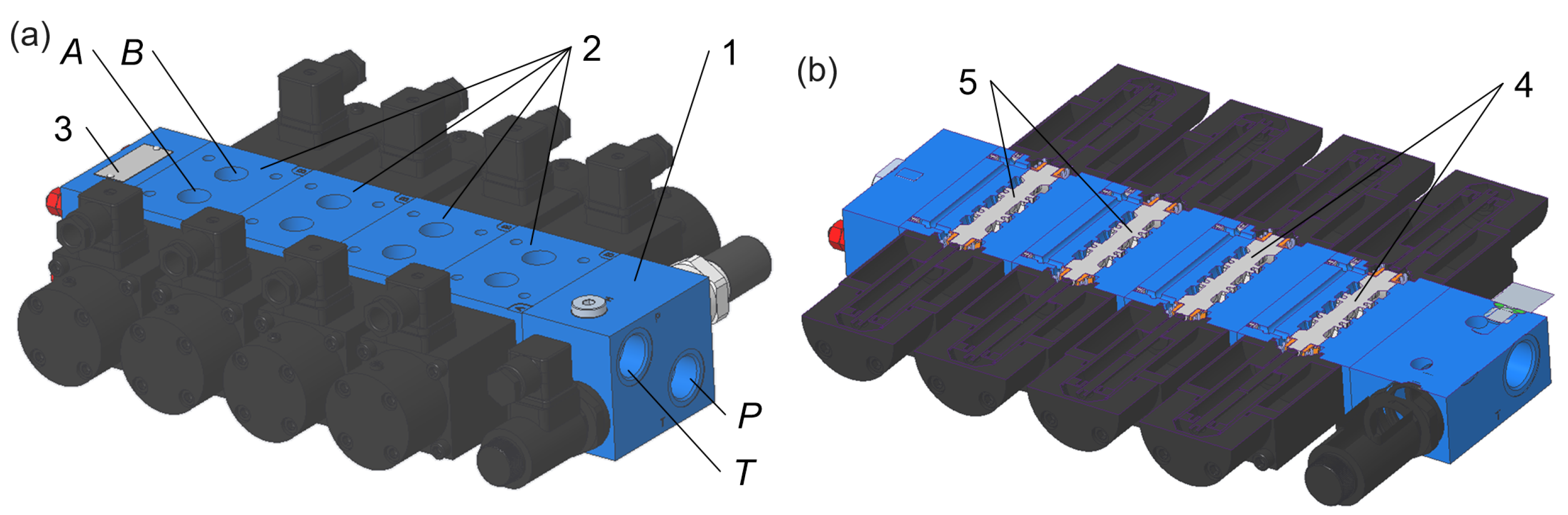
2. Case Study: Working Principle of the WREM10 Valve
2.1. Geometrical Model of the Valve
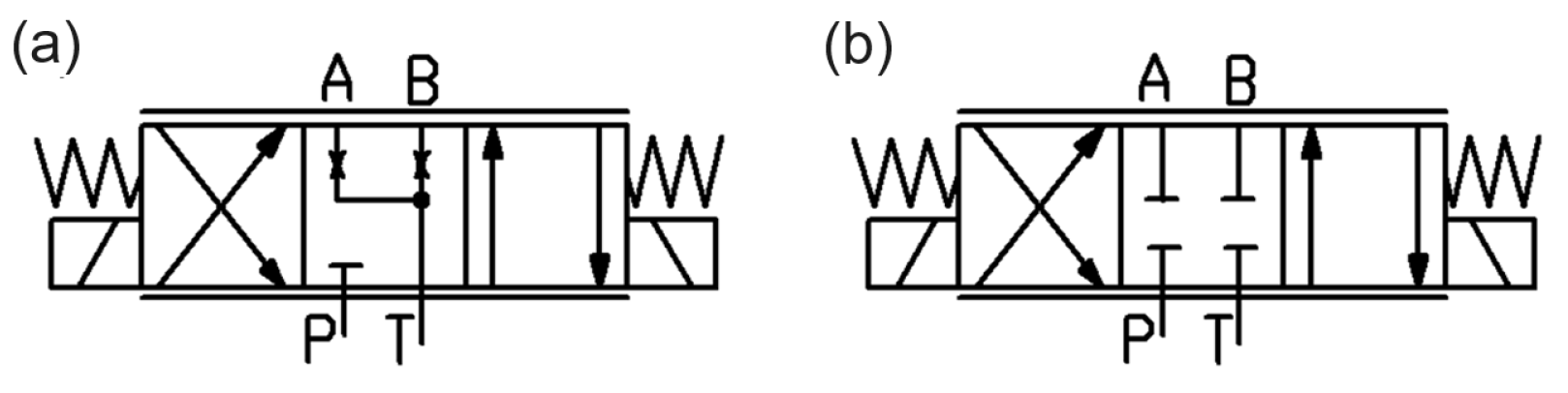
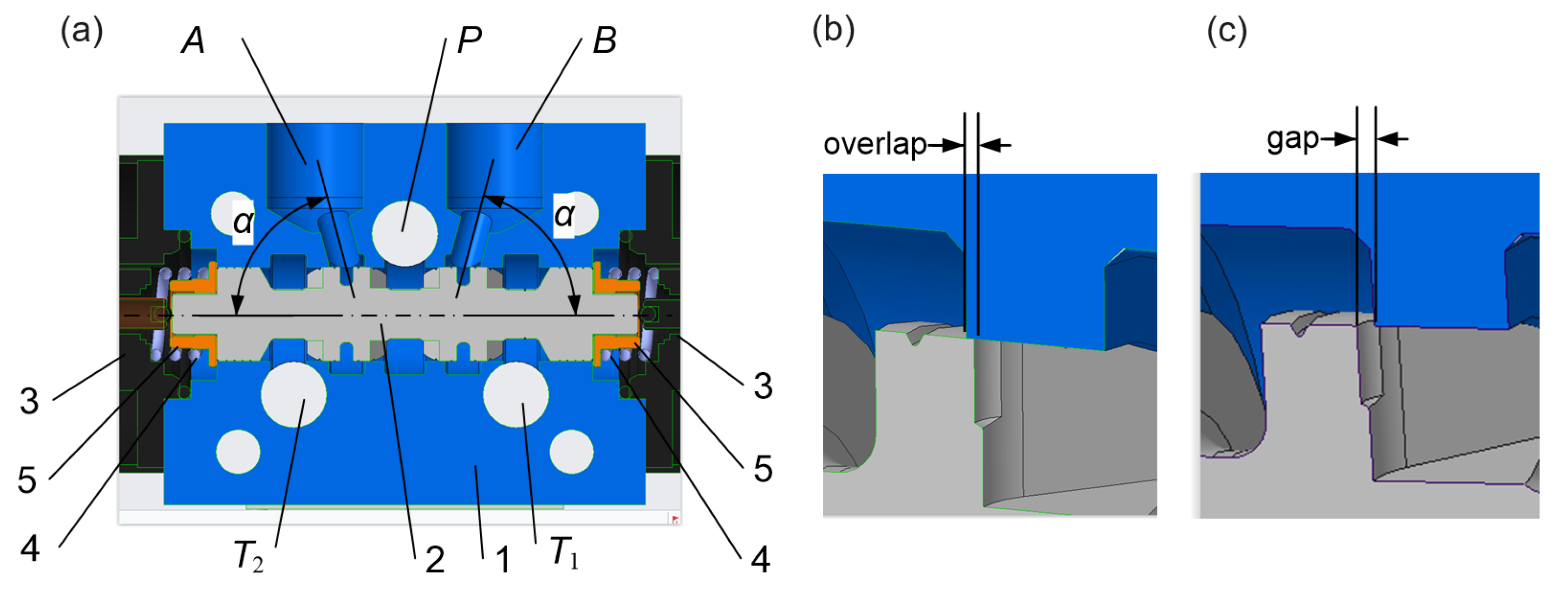
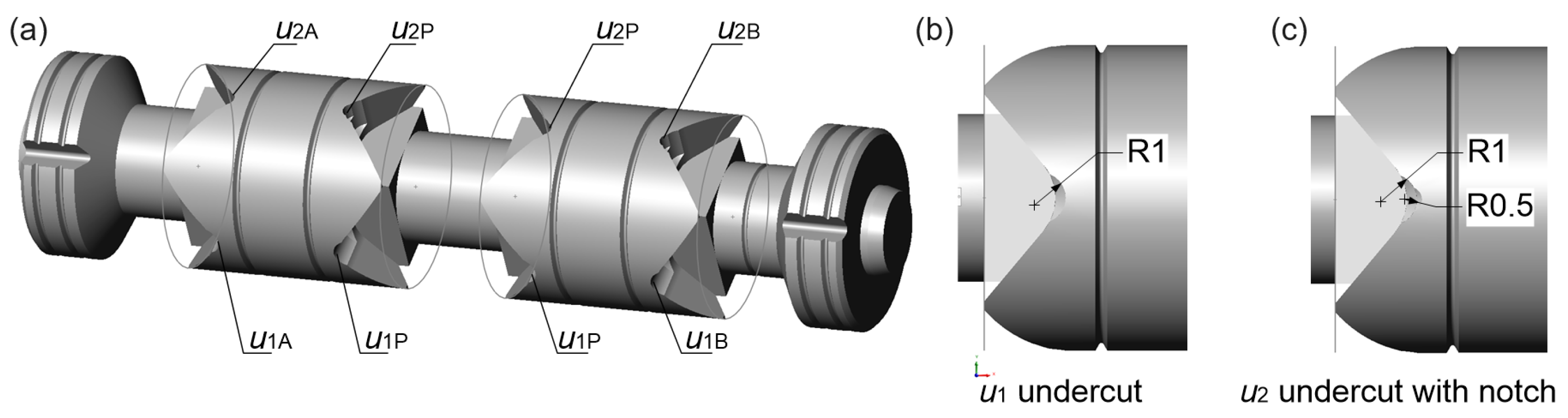
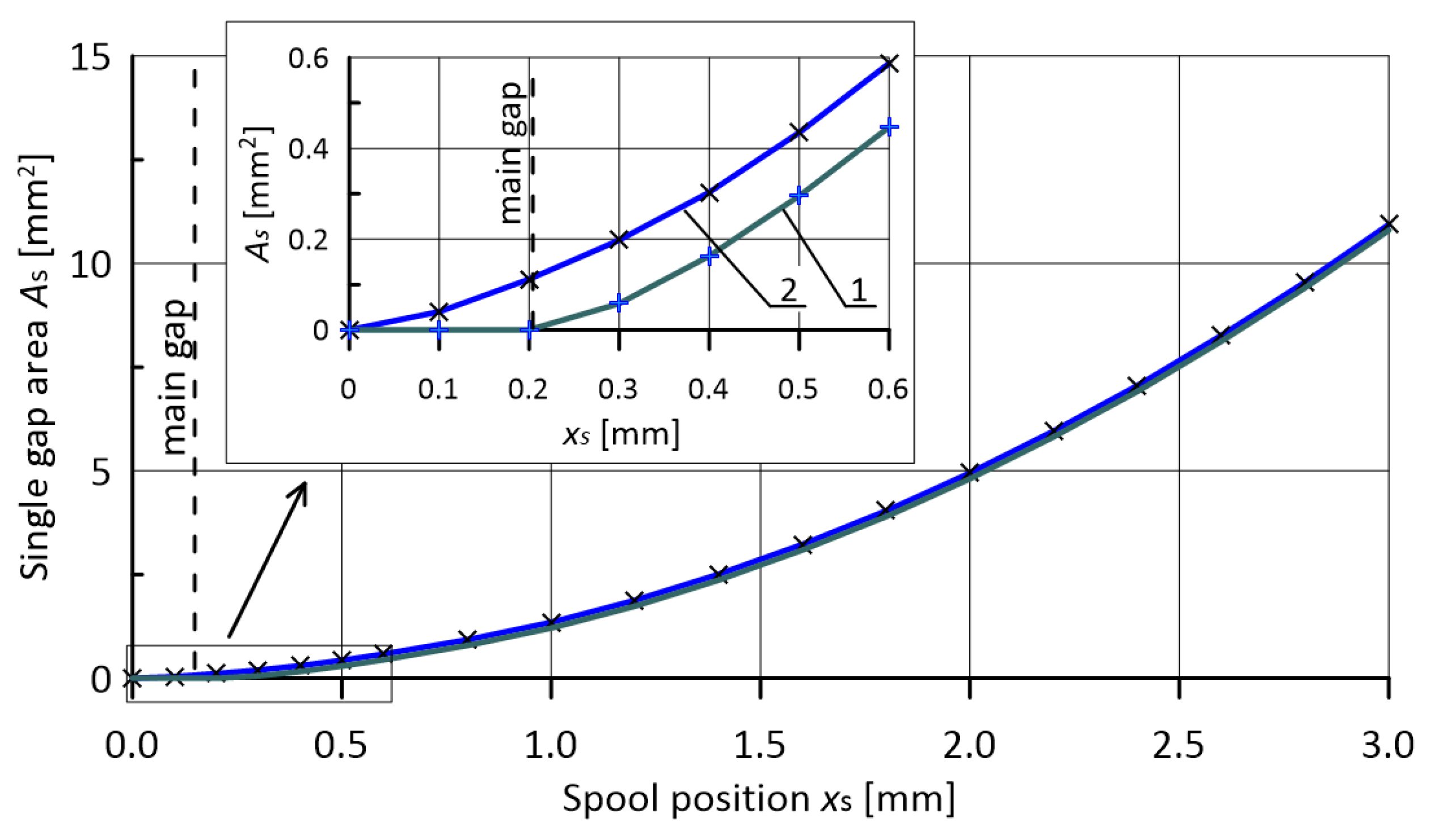
2.2. Spool Design
3. Methodology: Discrete Model and CFD Simulations
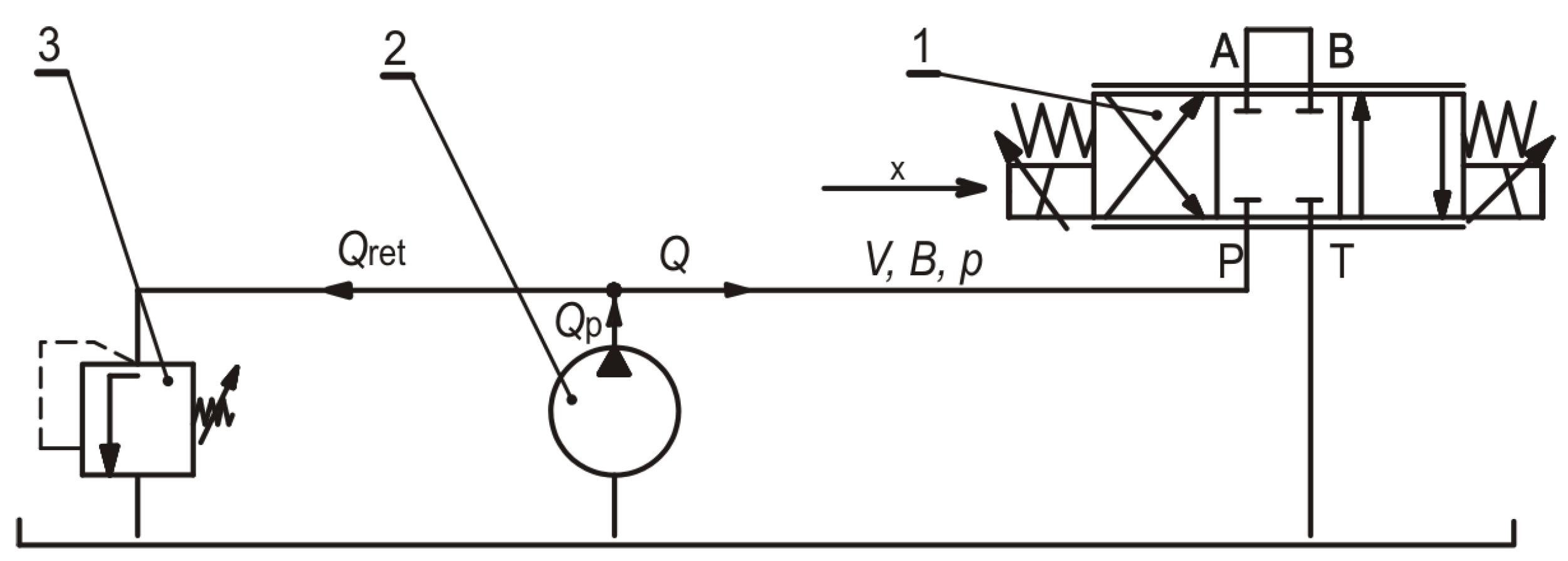
3.1. Discrete Flow Path Model and Boundary Conditions
- A series of geometric fluid models were built, corresponding to the individual positions of the spool and, thus, the areas of the flow gaps. The models were created in PTC CREO using geometric models of the valve body and spool;
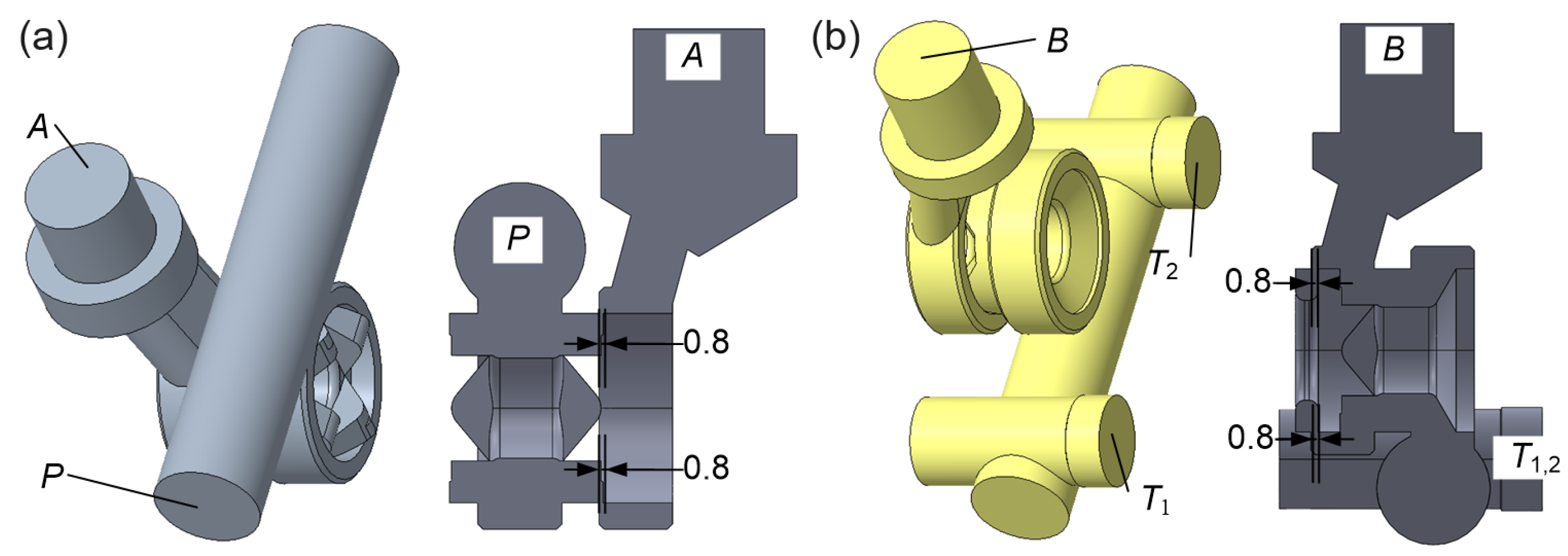
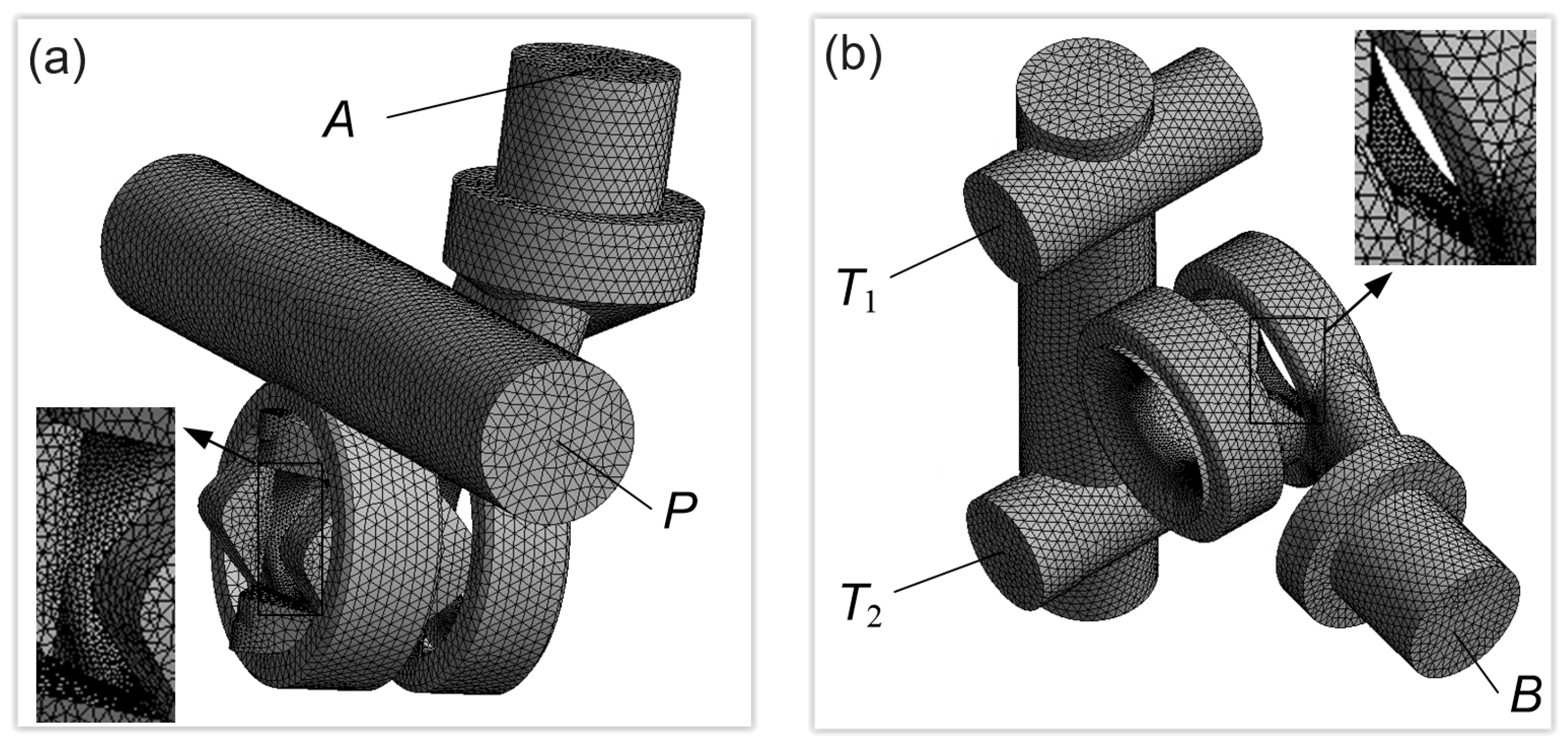
- Due to symmetry, the geometry of the flow channels on the supply side, P–A and P–B, is identical. Similarly, the return channels A–T and B–T have the same geometry. Hence, the analysis was performed for paths P–A and B–T. Examples of geometric models obtained for the E spool version at (gap width: ) are shown in Figure 6;
- The individual flow paths are geometrically separated. Hence, the analysis could be carried out independently for each of them.
- Input: Fluid velocity with the specification method as normal to the boundary. The velocity was determined by setting the input flow rate;
- Output: Static pressure. A gauge pressure equal to was assigned.
3.2. Turbulence Model Configuration
3.3. Equations of Fluid Flow through the Valve
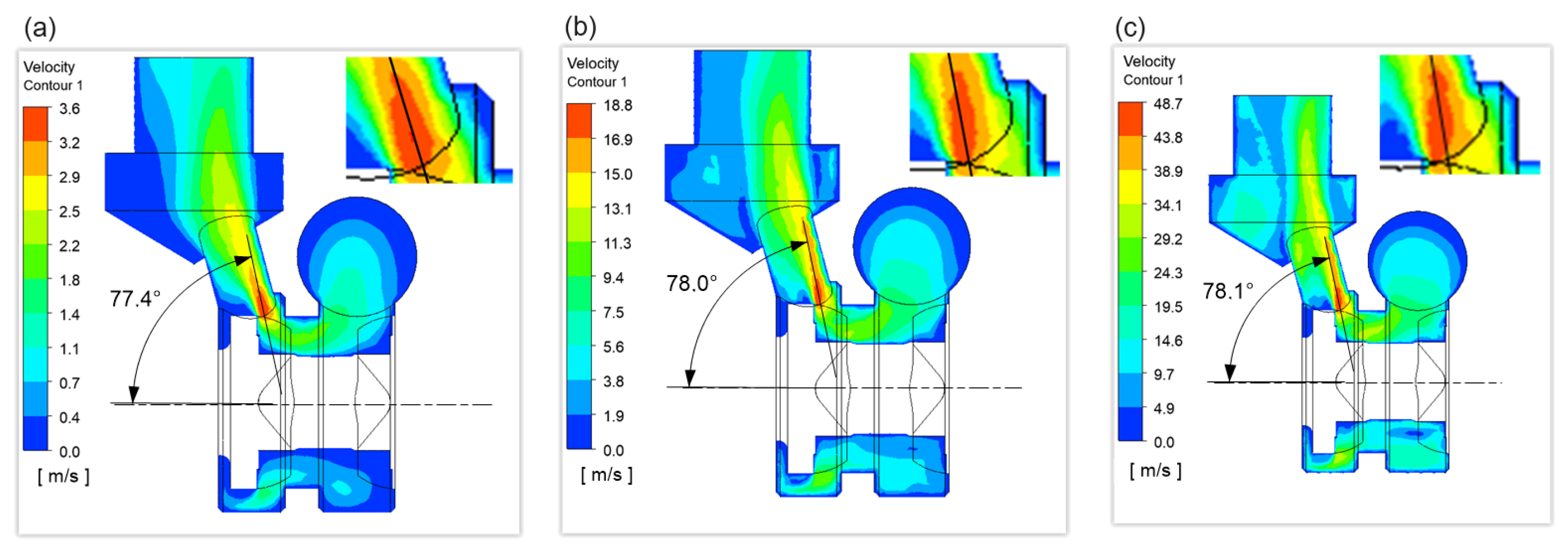
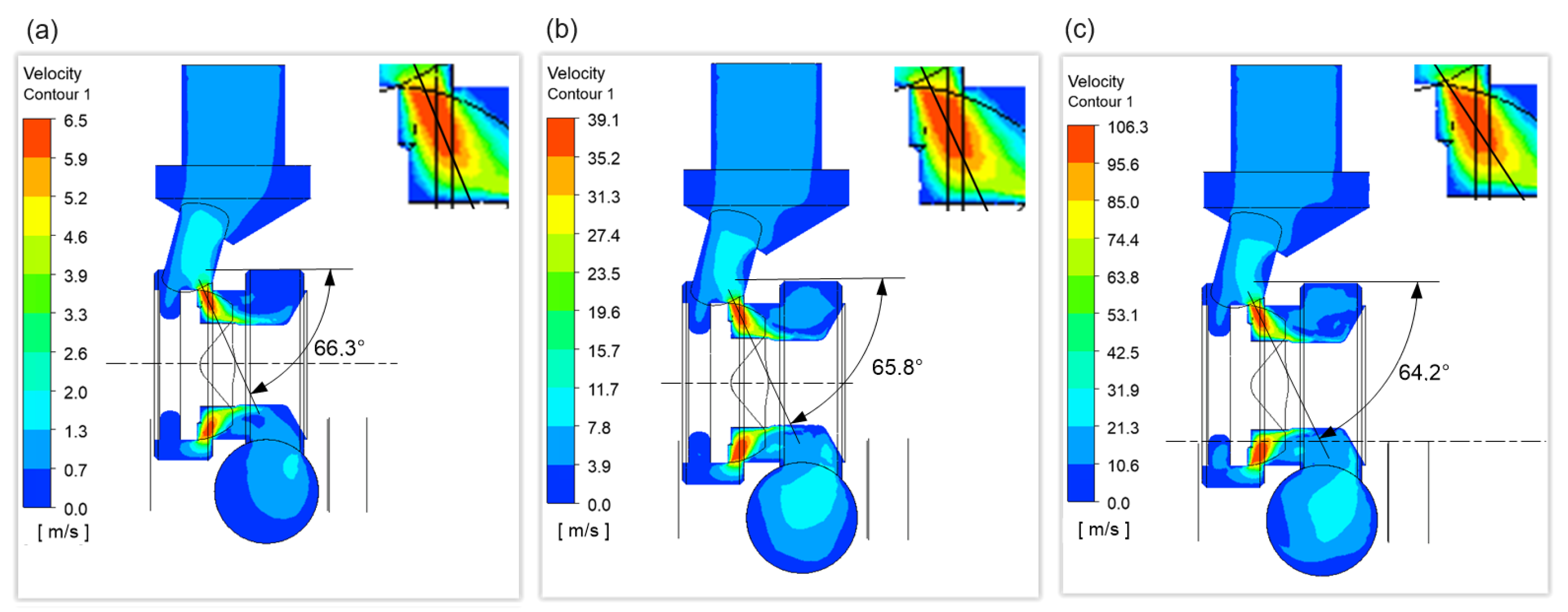
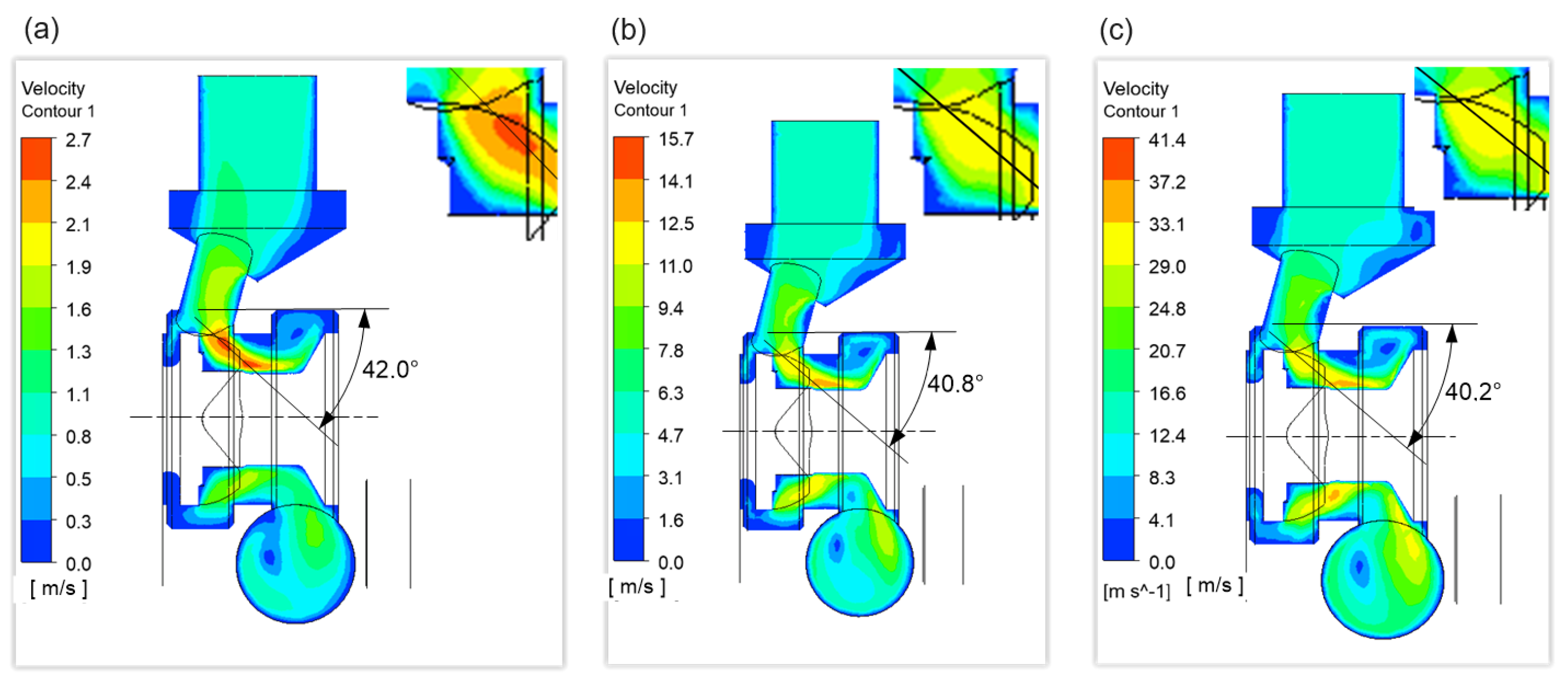
3.4. Results of CFD Analysis
4. Results: Valve Characteristics
4.1. Building a Simulation Model
4.2. Selection of Spring Stiffness
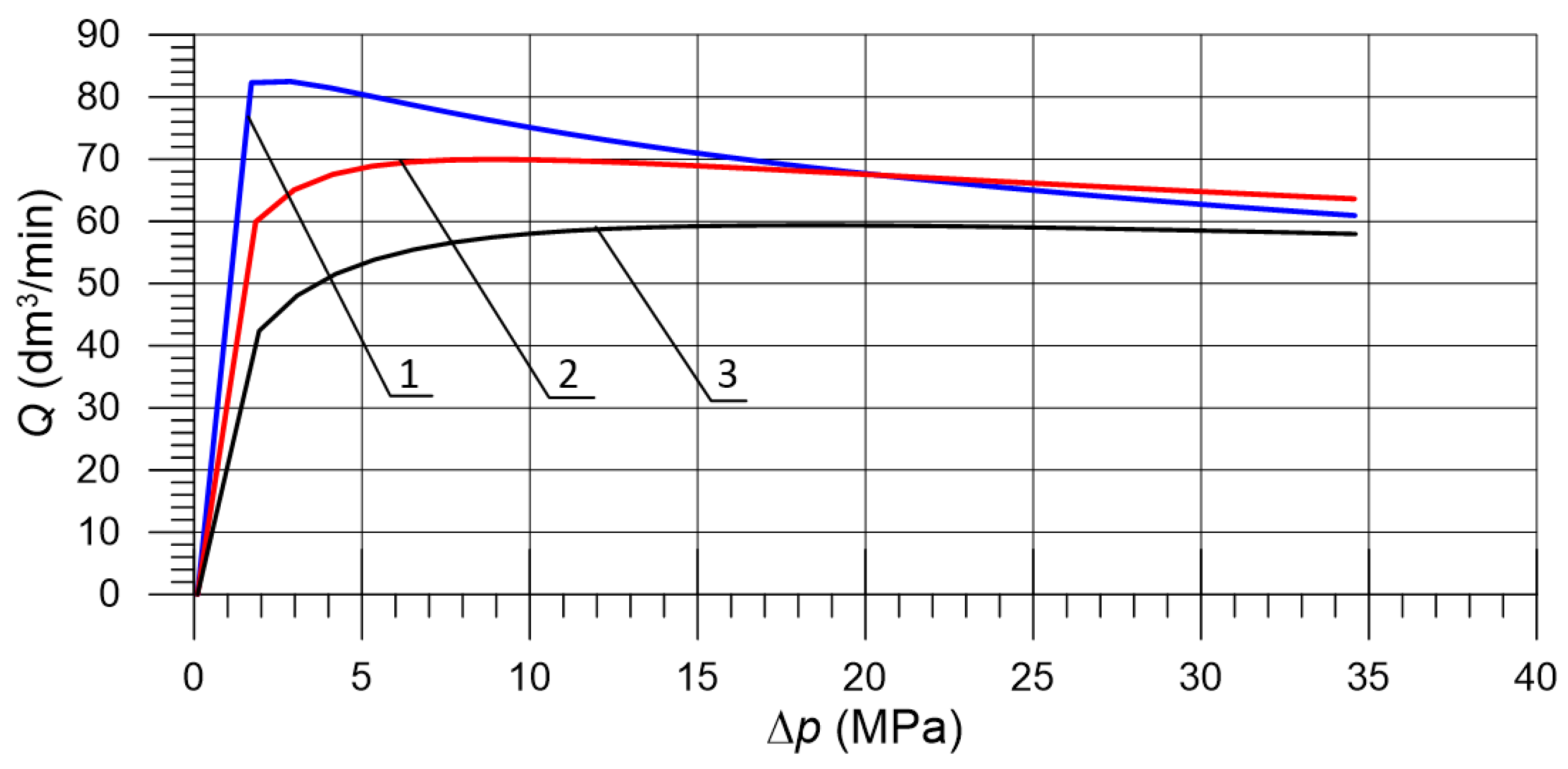
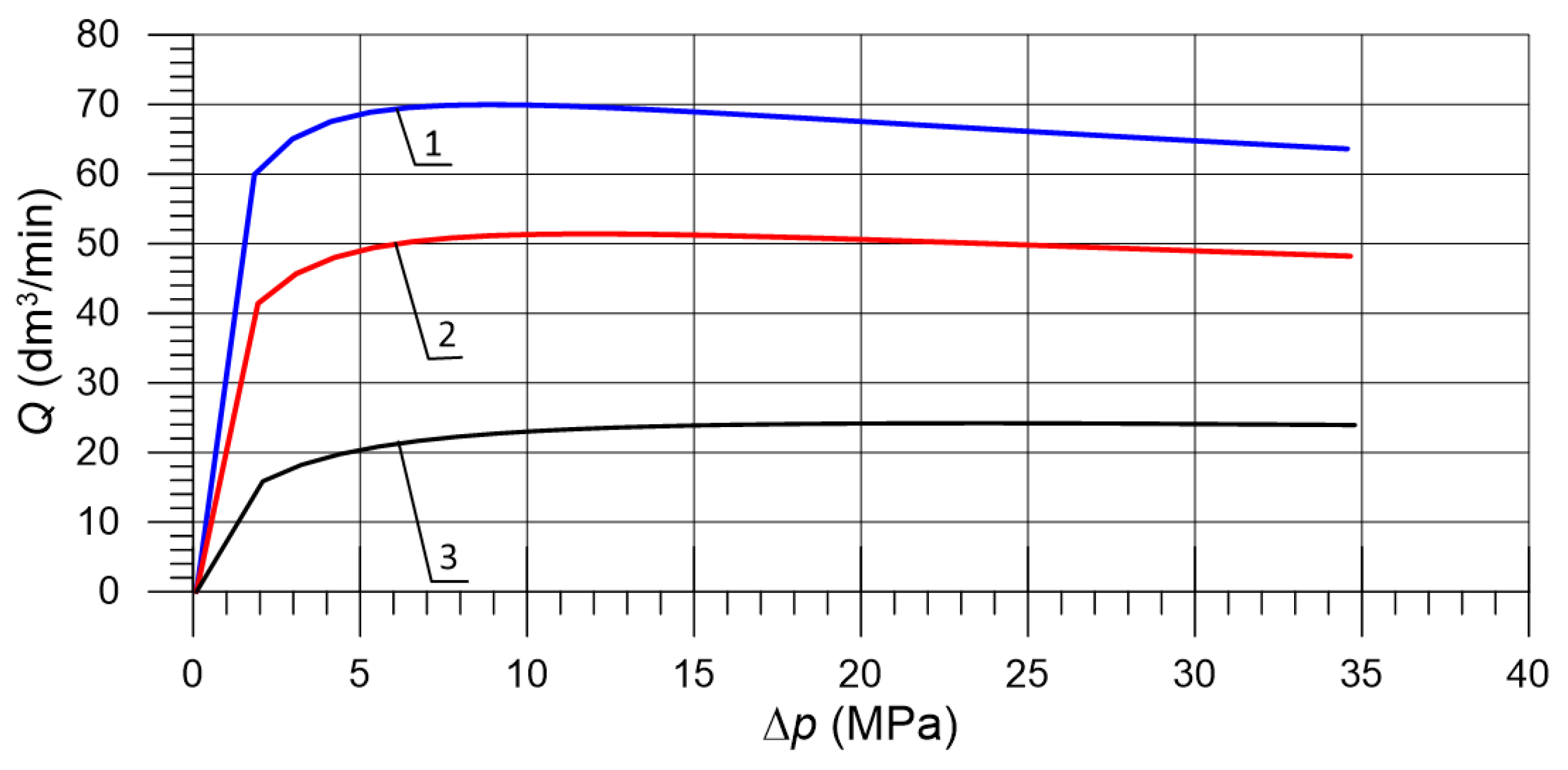
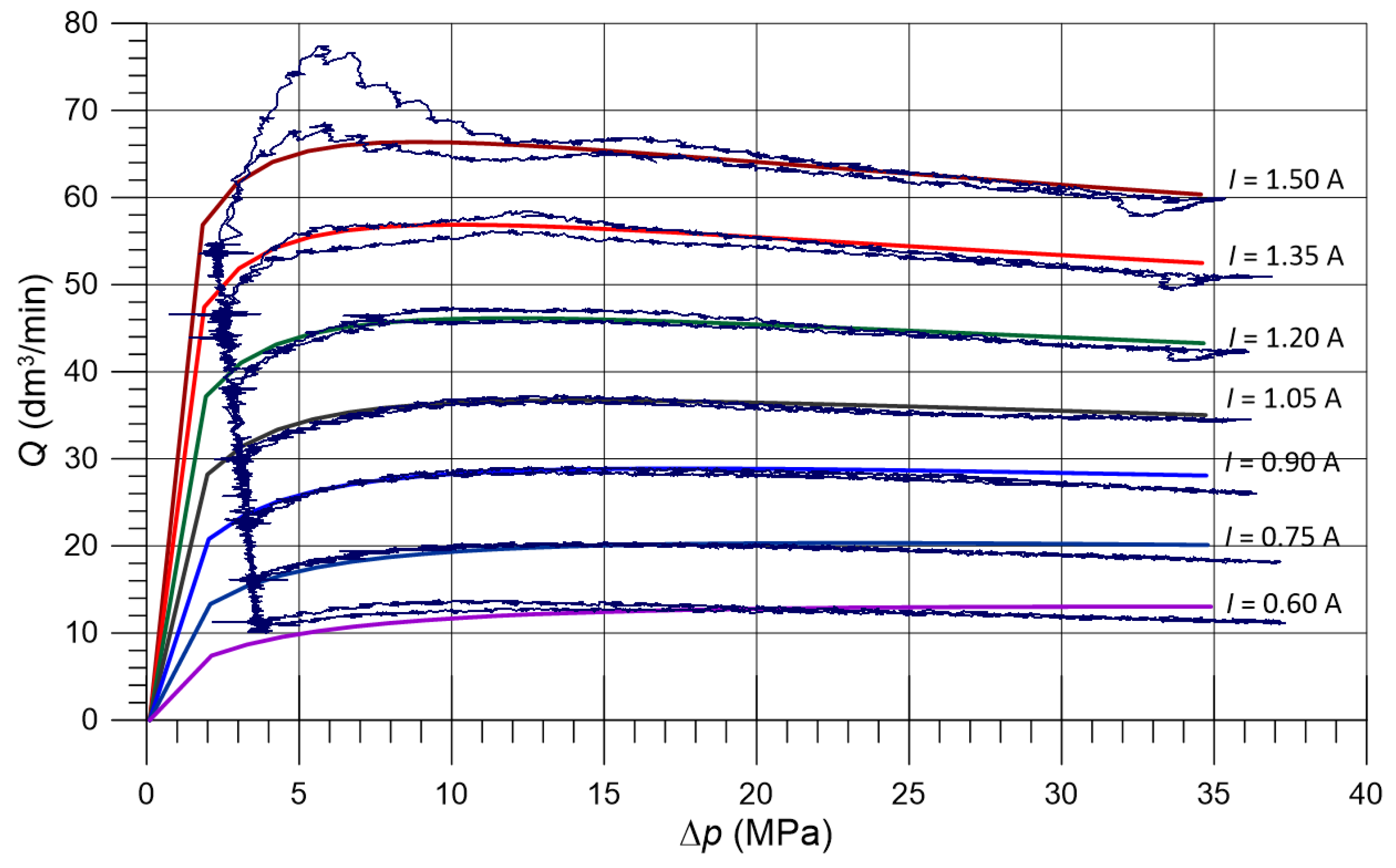
4.3. Flow Characteristics at a Fixed Current Intensity
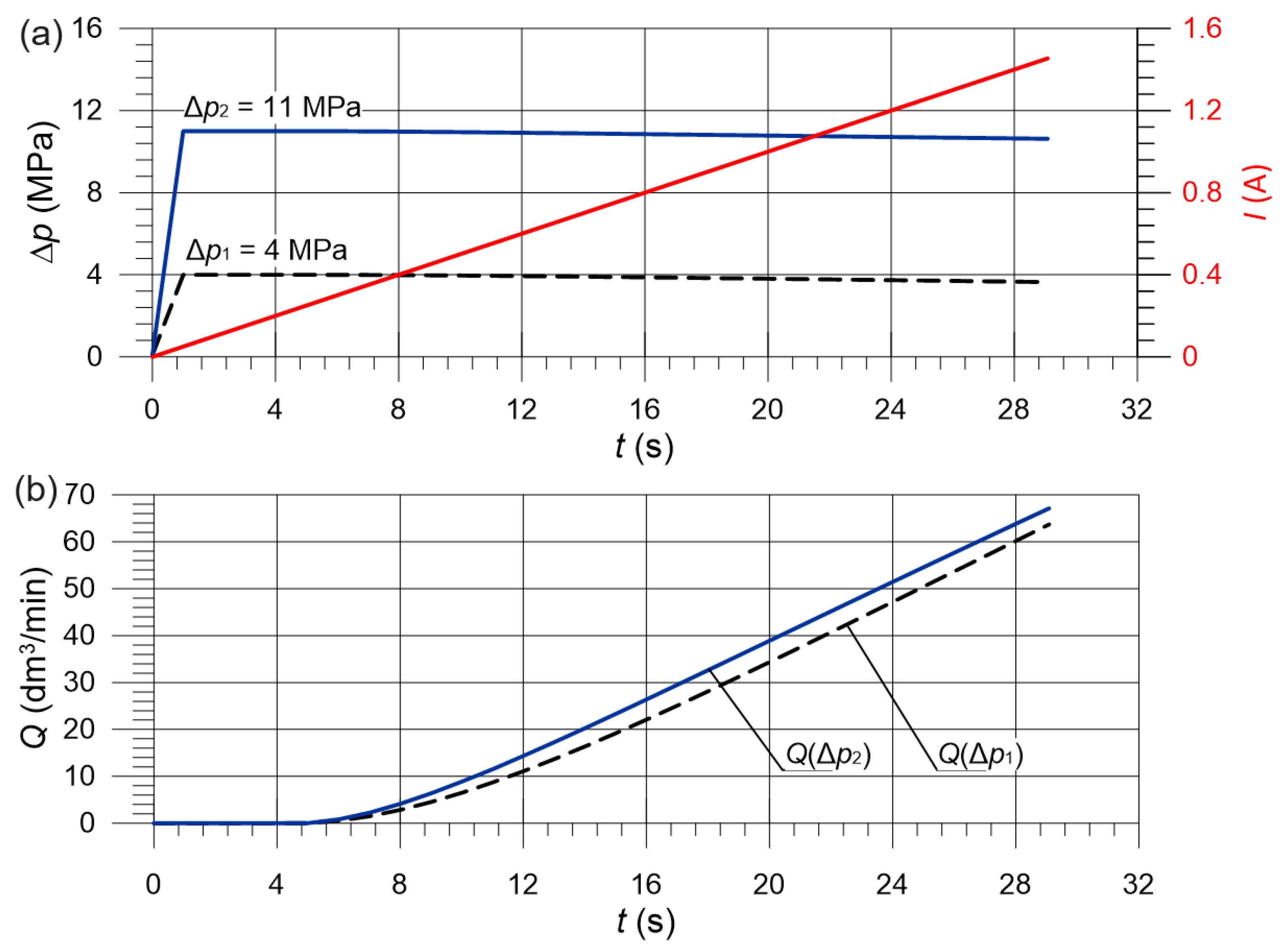
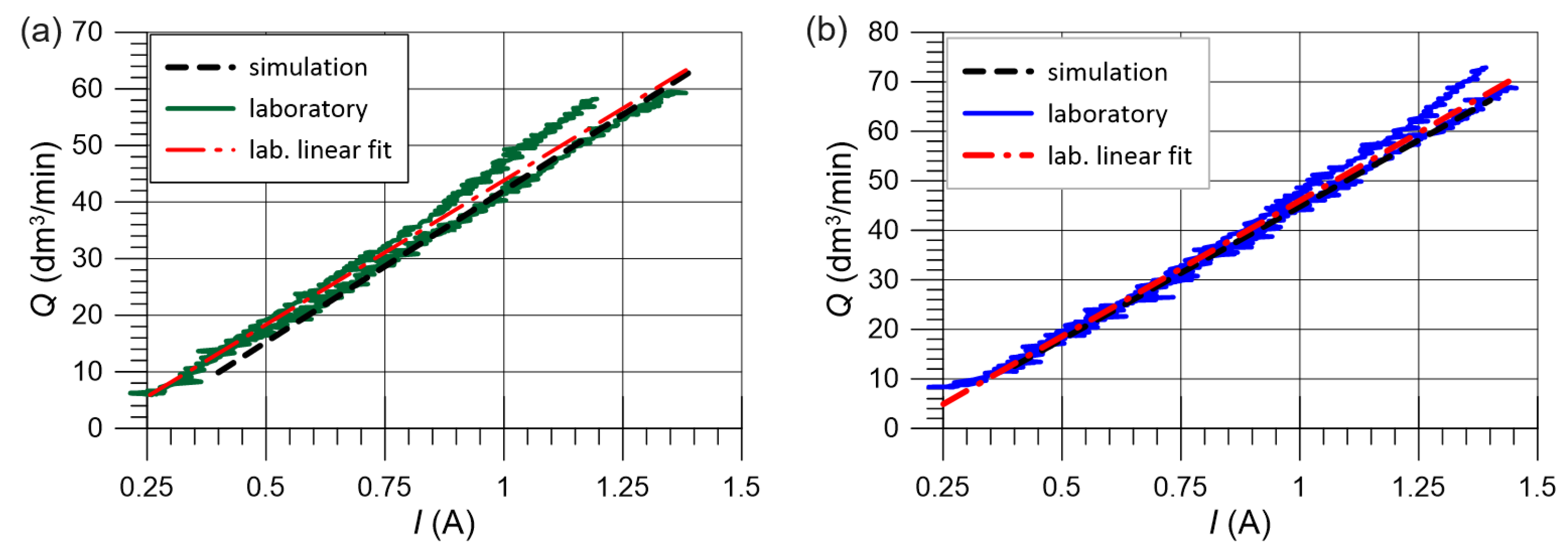
4.4. Control Characteristics
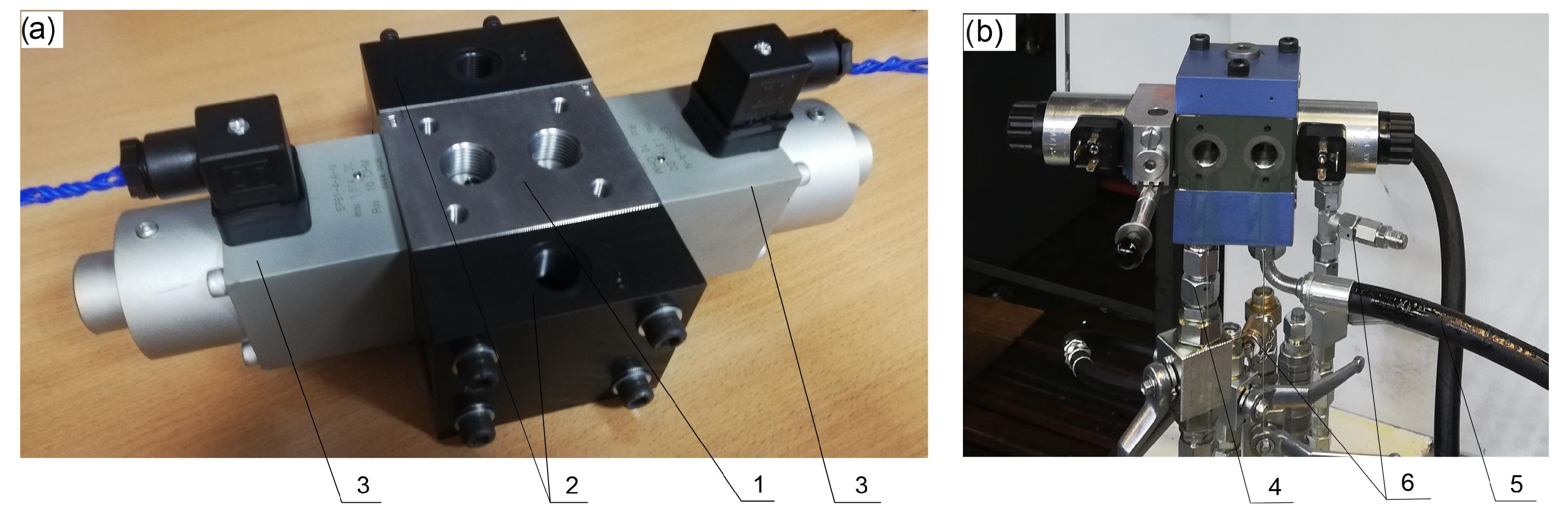
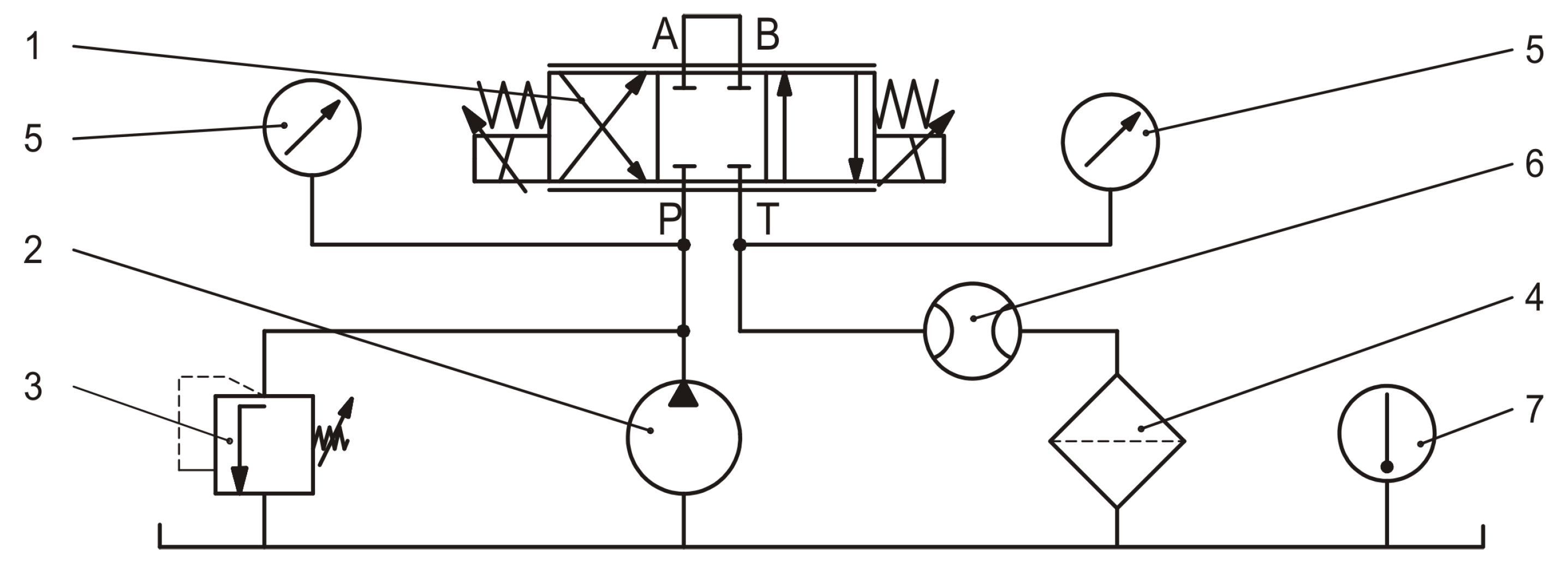
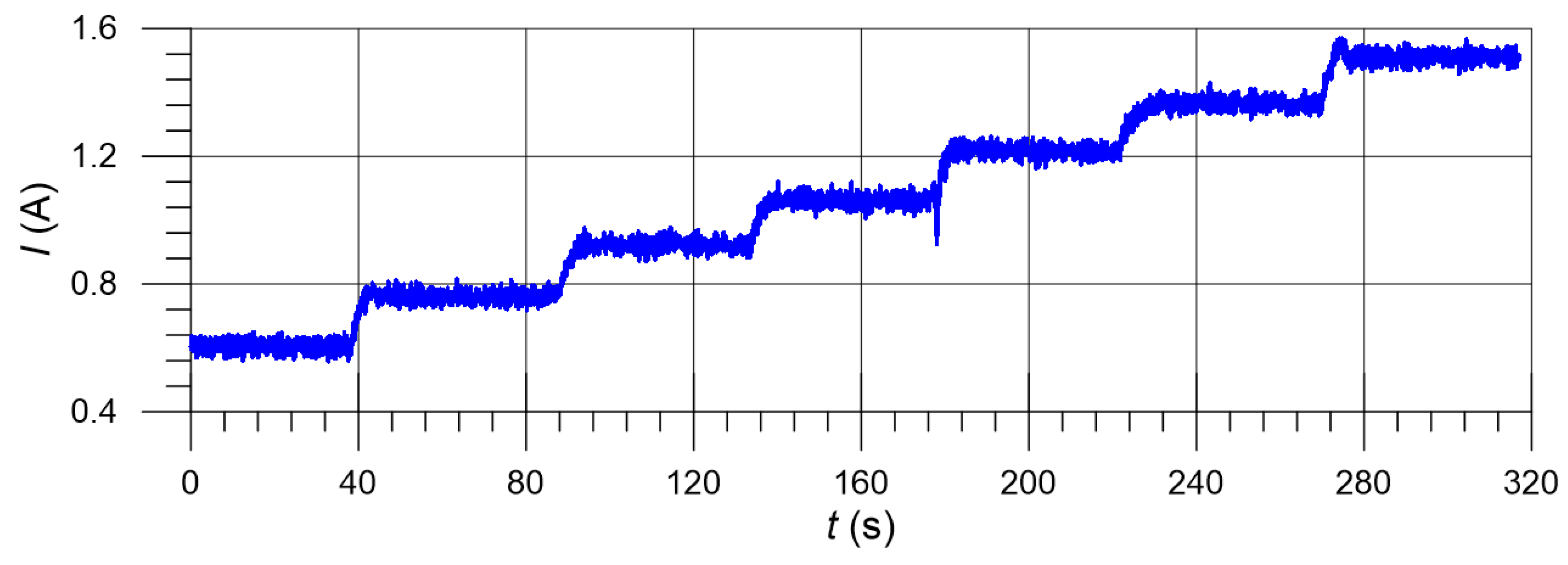
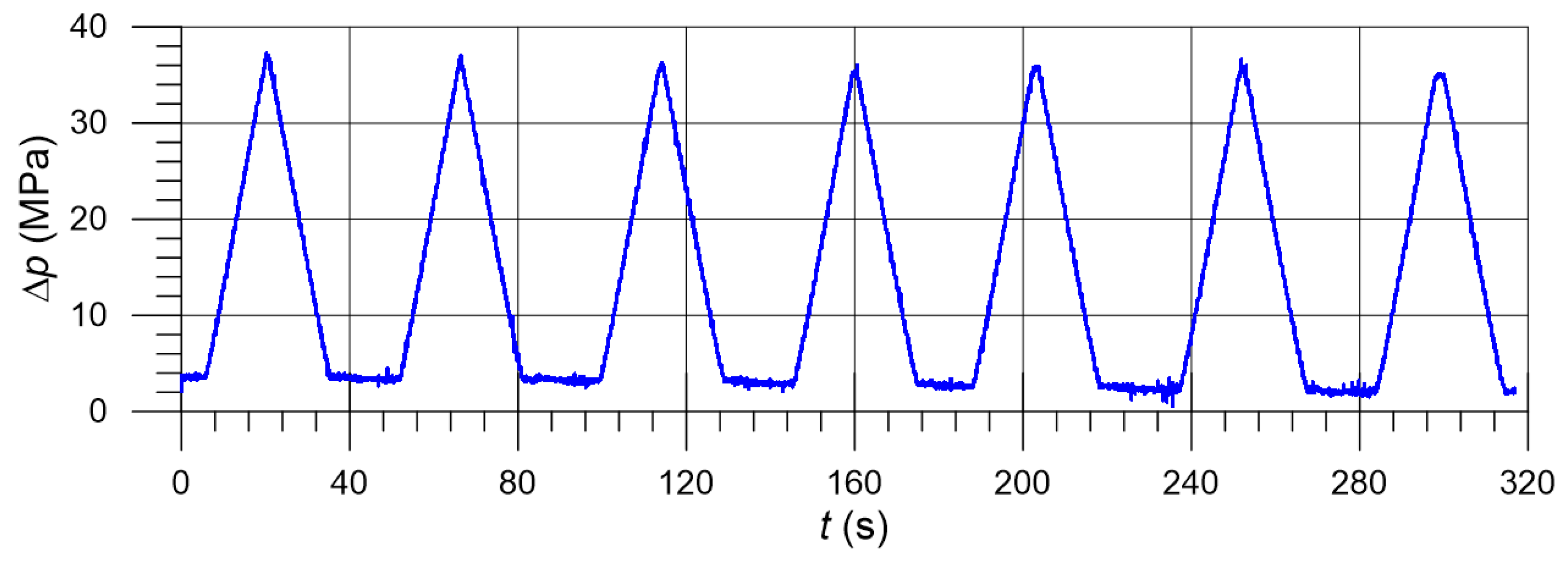
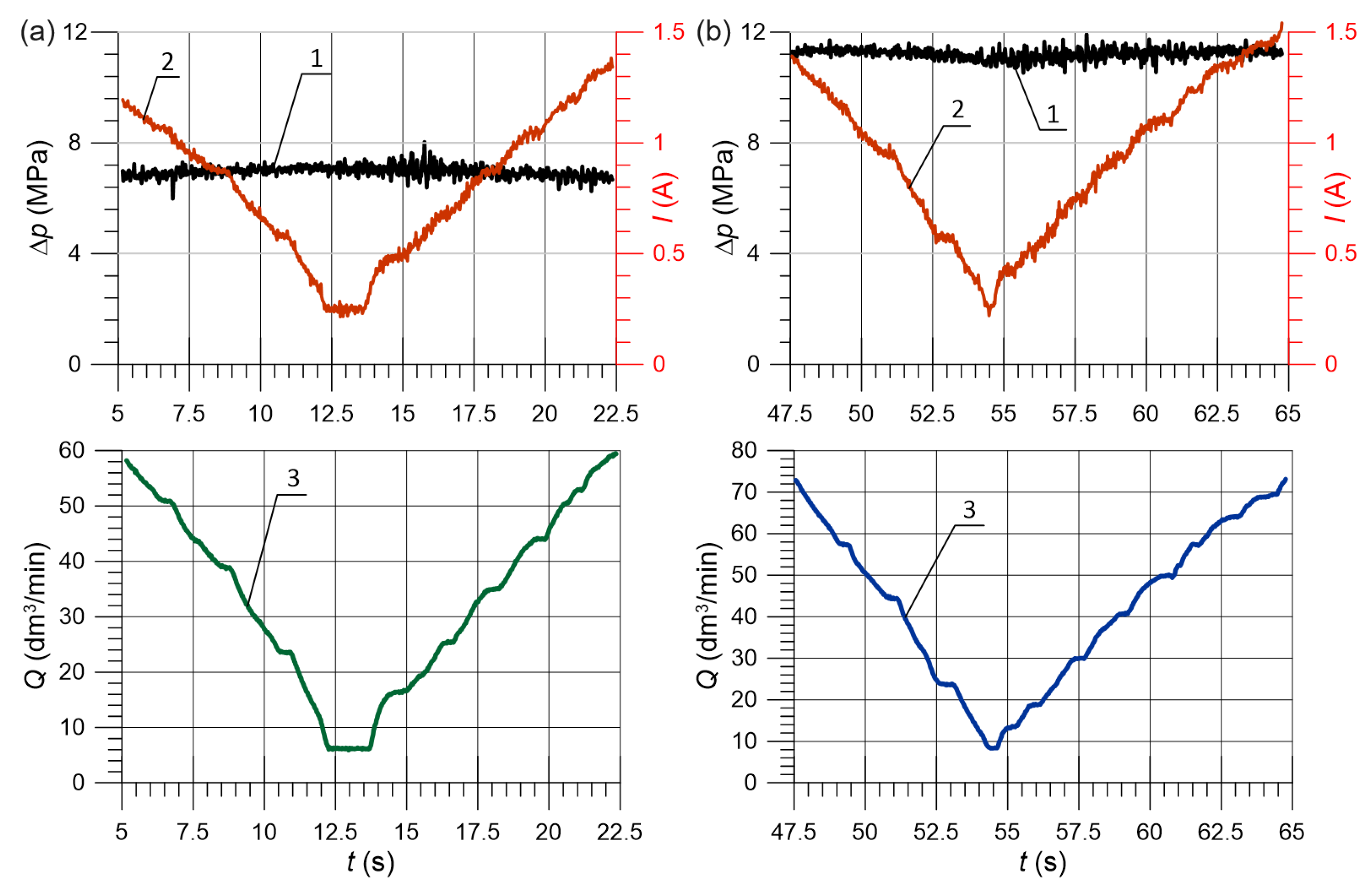
4.5. Test Bench Experiments
- Flowmeter: KRACHT, Germany, FM10-01-24-A, 8–80 , accuracy %;
- Pressure transducer: TRAFAG, Switzerland, NAT 100, 0 V, 0–10 , accuracy %;
- Pressure transducer: TRAFAG, Switzerland, NAT 400, 0 V, 0–40 , accuracy %;
- Temperature sensor: Introl, Poland, Fe-Konst 0–100 °C with a U90AN transducer;
- DAQ card: National Instruments, USA, NI USB-6009 (14 bit, 8 AI, 2 AO);
- DAQ system: National Instruments, USA, LabView.
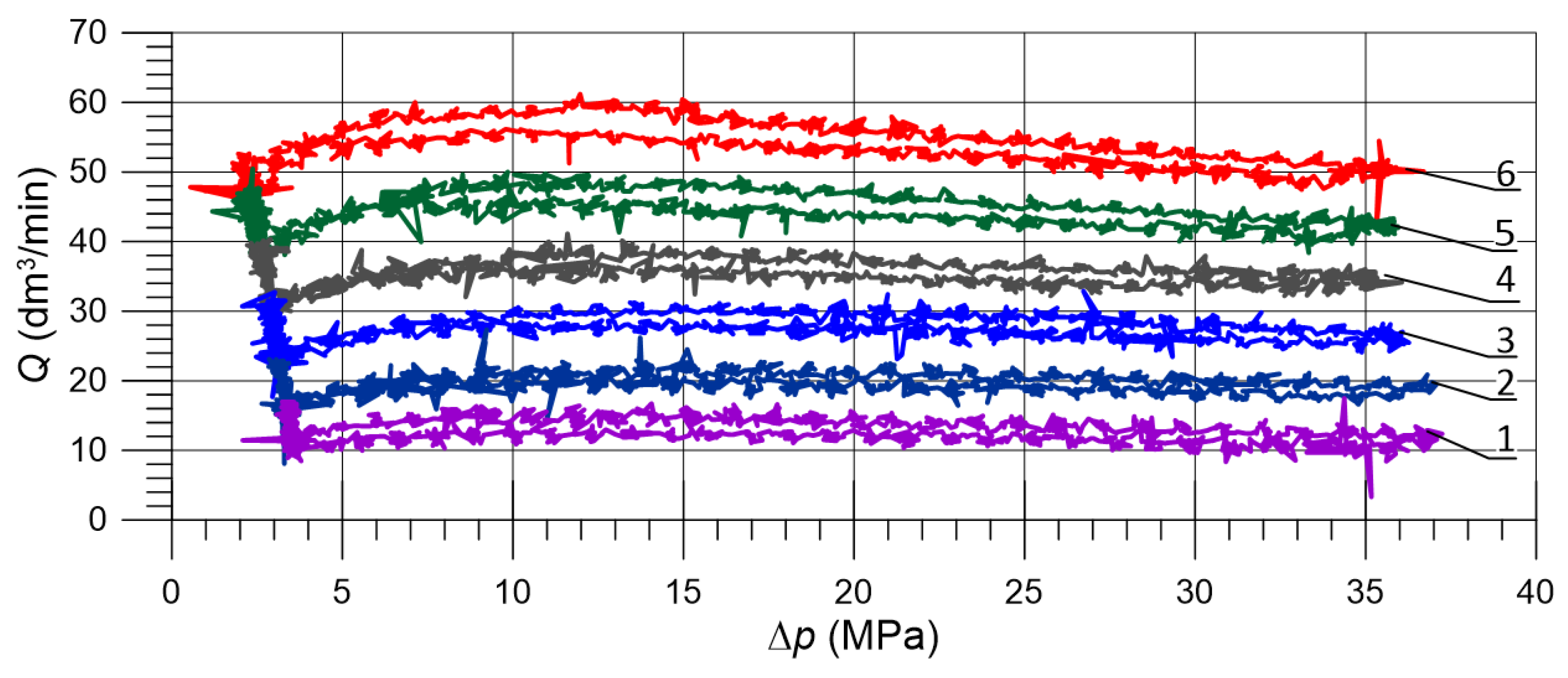
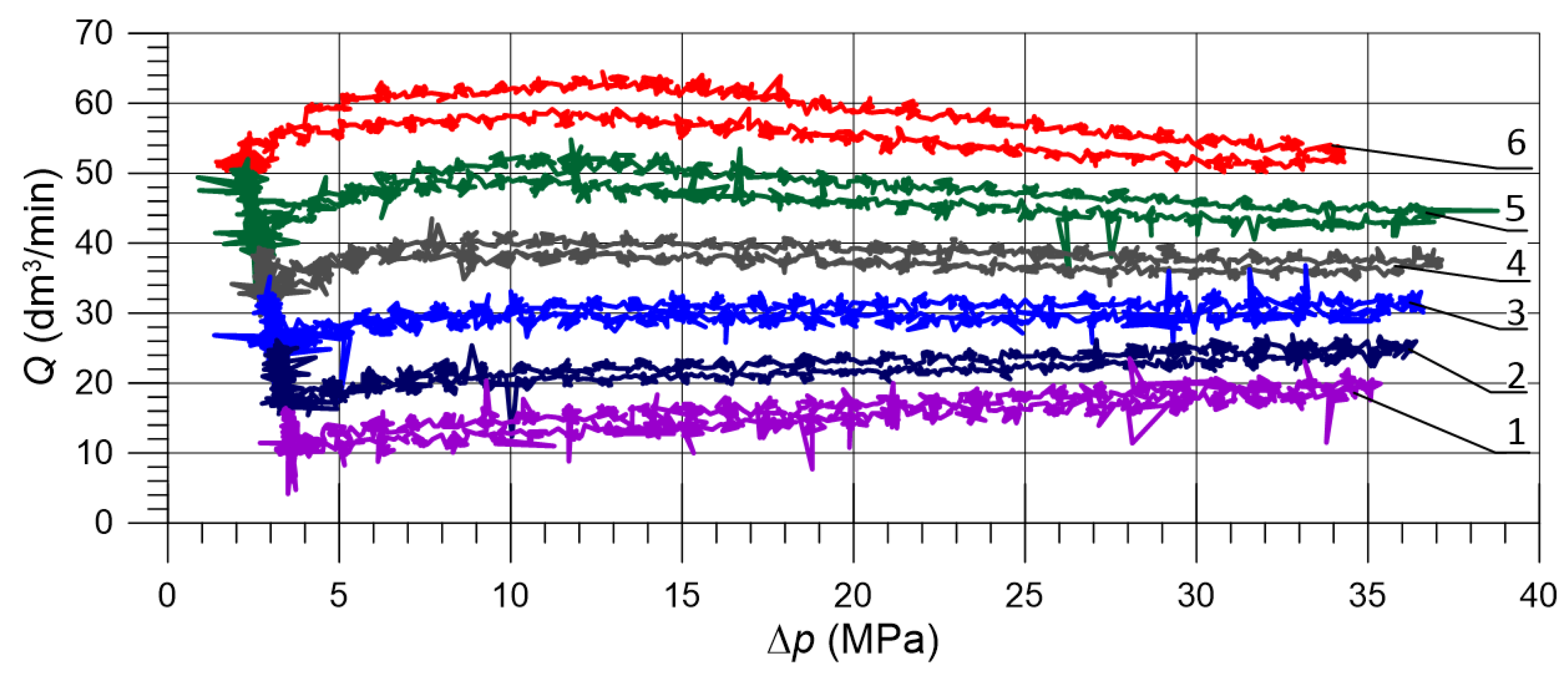
4.6. Comparison of Flow Characteristics with Simulation Results
5. Conclusions
- Flow forces may significantly influence proportional spool valve characteristics; with properly designed spool geometry, they can be used to significantly reduce the impact of pressure on the flow rate through the valve;
- The design should also take into account the stiffness of the return spring because its too-low or too-high stiffness may significantly affect the flow rate against the system pressure;
- The investigated proportional valve of the DN10 size allowed a controlled, stable flow rate in the range of 10–60 to be obtained, which corresponds to electromagnet current intensity from (40%) to (100%);
- The results show that the obtained flow rate variability for a given solenoid setting does not exceed 5–6%; this determines the possibility of the practical use of the valve in systems where higher accuracy is not required.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amirante, R.; Vescovo, G.D.; Lippolis, A. Evaluation of the flow forces on an open centre directional control valve by means of a computational fluid dynamic analysis. Energy Convers. Manag. 2006, 47, 1748–1760. [Google Scholar] [CrossRef]
- Amirante, R.; Moscatelli, P.; Catalano, L. Evaluation of the flow forces on a direct (single stage) proportional valve by means of a computational fluid dynamic analysis. Energy Convers. Manag. 2007, 48, 942–953. [Google Scholar] [CrossRef]
- Valdés, J.R.; Miana, M.J.; Núñez, J.L.; Pütz, T. Reduced order model for estimation of fluid flow and flow forces in hydraulic proportional valves. Energy Convers. Manag. 2008, 49, 1517–1529. [Google Scholar] [CrossRef]
- Chattopadhyay, H.; Kundu, A.; Saha, B.K.; Gangopadhyay, T. Analysis of flow structure inside a spool type pressure regulating valve. Energy Convers. Manag. 2012, 53, 196–204. [Google Scholar] [CrossRef]
- Aung, N.Z.; Yang, Q.; Chen, M.; Li, S. CFD analysis of flow forces and energy loss characteristics in a flapper–nozzle pilot valve with different null clearances. Energy Convers. Manag. 2014, 83, 284–295. [Google Scholar] [CrossRef]
- Gomez, I.; Gonzalez-Mancera, A.; Newell, B.; Garcia-Bravo, J. Analysis of the Design of a Poppet Valve by Transitory Simulation. Energies 2019, 12, 889. [Google Scholar] [CrossRef]
- Ye, J.; Zhao, Z.; Zheng, J.; Salem, S.; Yu, J.; Cui, J.; Jiao, X. Transient Flow Characteristic of High-Pressure Hydrogen Gas in Check Valve during the Opening Process. Energies 2020, 13, 4222. [Google Scholar] [CrossRef]
- Simic, M.; Herakovic, N. Reduction of the flow forces in a small hydraulic seat valve as alternative approach to improve the valve characteristics. Energy Convers. Manag. 2015, 89, 708–718. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, C.; Jin, B.; Yuan, T. Simulation and experimental research on steady flow force compensation for a servo proportional valve. Flow Meas. Instrum. 2023, 94, 102457. [Google Scholar] [CrossRef]
- Amirante, R.; Distaso, E.; Tamburrano, P. Sliding spool design for reducing the actuation forces in direct operated proportional directional valves: Experimental validation. Energy Convers. Manag. 2016, 119, 399–410. [Google Scholar] [CrossRef]
- Ding, X.; Li, R.; Xu, J.; Liu, Q.; Cheng, Y.; Liu, J. Study on flow force compensation characteristics and optimization design of jet guiding groove. Flow Meas. Instrum. 2022, 86, 102194. [Google Scholar] [CrossRef]
- Tan, L.; Xie, H.; Chen, H.; Yang, H. Structure optimization of conical spool and flow force compensation in a diverged flow cartridge proportional valve. Flow Meas. Instrum. 2019, 66, 170–181. [Google Scholar] [CrossRef]
- Liu, J.; Li, R.; Ding, X.; Liu, Q. Flow force research and structure improvement of cartridge valve core based on CFD method. Heliyon 2022, 8, e11700. [Google Scholar] [CrossRef]
- Gui, S.; Zhang, S.; Fu, B.; Ling, M. Fluid-dynamic analysis and multi-objective design optimization of piezoelectric servo valves. Flow Meas. Instrum. 2022, 85, 102157. [Google Scholar] [CrossRef]
- Borghi, M.; Milani, M.; Paoluzzi, R. Influence of notches shape and number of notches on the metering characteristics of hydraulic spool valves. Int. J. Fluid Power 2005, 6, 5–18. [Google Scholar] [CrossRef]
- Ye, Y.; Yin, C.; Li, X.; Zhou, W.; Yuan, F. Effects of groove shape of notch on the flow characteristics of spool valve. Energy Convers. Manag. 2014, 86, 1091–1101. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, A.; Chen, W.; Kuang, L.; Jiang, T. Methodology for expressing the flow coefficients of coupled throttling grooves in a proportional–directional valve. Zhejiang Univ. Sci. A 2020, 21, 799–816. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, A.; Li, X. Throttling characteristics prediction methodology for combined grooves in directional spool valves under variable flow rates. Heliyon 2023, 9, e21029. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, X.; Quan, L.; Li, Y.; Hao, Y.; Ge, L. A method for improving flow control valve performance based on active differential pressure regulation. Measurement 2023, 219, 113271. [Google Scholar] [CrossRef]
- Agh, S.M.; Pirkandi, J.; Mahmoodi, M.; Jahromi, M. Development of a novel rotary flow control valve with an electronic actuator and a pressure compensator valve for a gas turbine engine fuel control system. Flow Meas. Instrum. 2020, 74, 101759. [Google Scholar] [CrossRef]
- Huang, J.; Wang, X.; Wang, H.; Hao, H. Development of a flow control valve with digital flow compensator. Flow Meas. Instrum. 2019, 66, 157–169. [Google Scholar] [CrossRef]
- Lisowski, E.; Filo, G.; Rajda, J. Pressure compensation using flow forces in a multi-section proportional directional control valve. Energy Convers. Manag. 2015, 103, 1052–1064. [Google Scholar] [CrossRef]
- Filo, G.; Lisowski, E. Research on Flow Forces in the USAB10 Control Valve Using a CFD Method. In Proceedings of the Advances in Hydraulic and Pneumatic Drives and Control 2020: NSHP 2020, Trzebieszowice, Poland, 21–23 October 2020; Stryczek, J., Warzyńska, U., Eds.; Lecture Notes in Mechanical Engineering. Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Oil Kinematic Viscosity | Oil Density | Oil Temperature | Reynolds Number | Turbulence Intensity | Turbulence Length Scale |
|---|---|---|---|---|---|
| T | I | ℓ | |||
| − | % | ||||
| 870 | 313 | 3200–13,600 | 4.8–5.8 | 0.10–0.52 |
| Q | |||||||
|---|---|---|---|---|---|---|---|
| 5 | 0.95 | 0.29 | 0.15 | 0.12 | 0.11 | 0.11 | 0.11 |
| 10 | 2.46 | 0.45 | 0.23 | 0.16 | 0.14 | 0.12 | 0.12 |
| 20 | 13.78 | 2.12 | 0.82 | 0.45 | 0.30 | 0.24 | 0.20 |
| 30 | 30.88 | 4.68 | 1.74 | 0.88 | 1.54 | 0.42 | 0.31 |
| 60 | - | 18.49 | 6.65 | 3.15 | 1.84 | 1.36 | 0.95 |
| 80 | - | - | 11.79 | 5.58 | 3.17 | 2.48 | 1.62 |
| Q | |||||||
|---|---|---|---|---|---|---|---|
| 5 | 0.99 | 0.29 | 0.14 | 0.12 | 0.11 | 0.11 | 0.11 |
| 10 | 2.28 | 0.45 | 0.22 | 0.16 | 0.13 | 0.12 | 0.11 |
| 20 | 13.13 | 2.12 | 0.78 | 0.41 | 0.28 | 0.22 | 0.17 |
| 30 | 29.77 | 4.68 | 1.65 | 0.80 | 0.50 | 0.37 | 0.26 |
| 60 | - | 18.49 | 6.36 | 2.88 | 1.71 | 1.25 | 0.75 |
| 80 | - | - | 11.21 | 5.13 | 2.93 | 2.08 | 1.21 |
| Spring Stiffness | Initial Tension | Spool Diameter | Spool Overlap | Maximum Pressure | Maximum Current Intensity |
|---|---|---|---|---|---|
| 12 | 35 |
| Size | I% | ||||||
|---|---|---|---|---|---|---|---|
| 50 | 60 | 70 | 80 | 90 | 100 | ||
| 5 | 9.1 | 11.9 | 20.3 | 27.6 | 35.1 | 44.0 | |
| DN6 | 30 | 7.6 | 10.4 | 15.1 | 18.0 | 22.2 | 27.7 |
| % | 16.5 | 12.6 | 25.6 | 34.8 | 36.7 | 37.0 | |
| 5 | 16.5 | 26.2 | 34.0 | 44.0 | 56.1 | 65.4 | |
| DN10 | 30 | 19.1 | 27.5 | 35.5 | 43.5 | 54.0 | 61.3 |
| % | 13.6 | 4.7 | 4.2 | 1.1 | 3.7 | 6.3 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lisowski, E.; Filo, G.; Rajda, J. Adjustment of Proportional Control Valve Characteristics via Pressure Compensation Using Flow Forces. Energies 2024, 17, 1546. https://doi.org/10.3390/en17071546
Lisowski E, Filo G, Rajda J. Adjustment of Proportional Control Valve Characteristics via Pressure Compensation Using Flow Forces. Energies. 2024; 17(7):1546. https://doi.org/10.3390/en17071546
Chicago/Turabian StyleLisowski, Edward, Grzegorz Filo, and Janusz Rajda. 2024. "Adjustment of Proportional Control Valve Characteristics via Pressure Compensation Using Flow Forces" Energies 17, no. 7: 1546. https://doi.org/10.3390/en17071546
APA StyleLisowski, E., Filo, G., & Rajda, J. (2024). Adjustment of Proportional Control Valve Characteristics via Pressure Compensation Using Flow Forces. Energies, 17(7), 1546. https://doi.org/10.3390/en17071546