
Generation and Transmission Expansion Planning Using a Nested Decomposition Algorithm


Abstract
1. Introduction
1.1. Technical Literature Review
1.2. Contributions
2. Background—Mathematical Formulation of the GTCEP Problem
2.1. Extensive Formulation (EF) of the GTCEP Problem
2.1.1. Objective Function
2.1.2. Technical Constraints
2.1.3. Generation and Transmission Operational Constraints
2.1.4. Investment Constraints
2.1.5. Operation and Planning Coupling Constraints
2.2. Concise Dynamic Formulation
3. Nested Decomposition Algorithm—SDDiP Methodology
3.1. Mathematical Stochastic Framework
- Storing locally the state variables (in this case, variables linked temporarily),
- Limiting iteratively the lower bound of the objective function.
3.1.1. Forward Pass Iteration
3.1.2. Backward Pass Iteration
3.1.3. Convergence Criteria
3.2. Types of Cuts
3.2.1. Benders Cuts—B
3.2.2. Integer Optimality Cuts—I
3.2.3. Lagrangian Cuts—L
3.2.4. Strengthened Benders Cuts—SB
- Solve a linear relaxation of .
- Store the coefficient of the dual variable associated with the constraint .
- Solve the Lagrangian relaxation of Equation (30) setting equals .
- Store the coefficient , given by .
3.3. Algorithm
| Algorithm 1 Nested Decomposition Algorithm |
|
4. Power Systems Cases
5. Simulation Results
- Case I: Comparisons between the EF and SDDiP methodologies. To analyze differences in simulation time and convergence, a GTCEP problem is solved using both EF and SDDiP methodologies. For this test, the cuts are used independently to conclude about its performance. Additionally, based on the individual performance of each cut in the NDA, we aim to confirm the conditions of each type of cut.
- Case II: Nested Decomposition cuts. To test the performance of each type of cut in the SDDiP methodology, a comparison is conducted to conclude the convergence of each type of cut. We want to evaluate its evolution throughout each iteration. Thus, it is possible to identify each cut’s benefits and drawbacks.
- Case III: Performance of cut patterns. Based on the results and analyses of all previous simulations, different cut combinations are tested using the SDDiP methodology. The convergence gap, solver time and number of iterations are compared to test the performance of each cut pattern to assess and propose a pattern of cuts that can reduce the simulation time and ensure convergence at a reasonable level.
5.1. Results of Case I
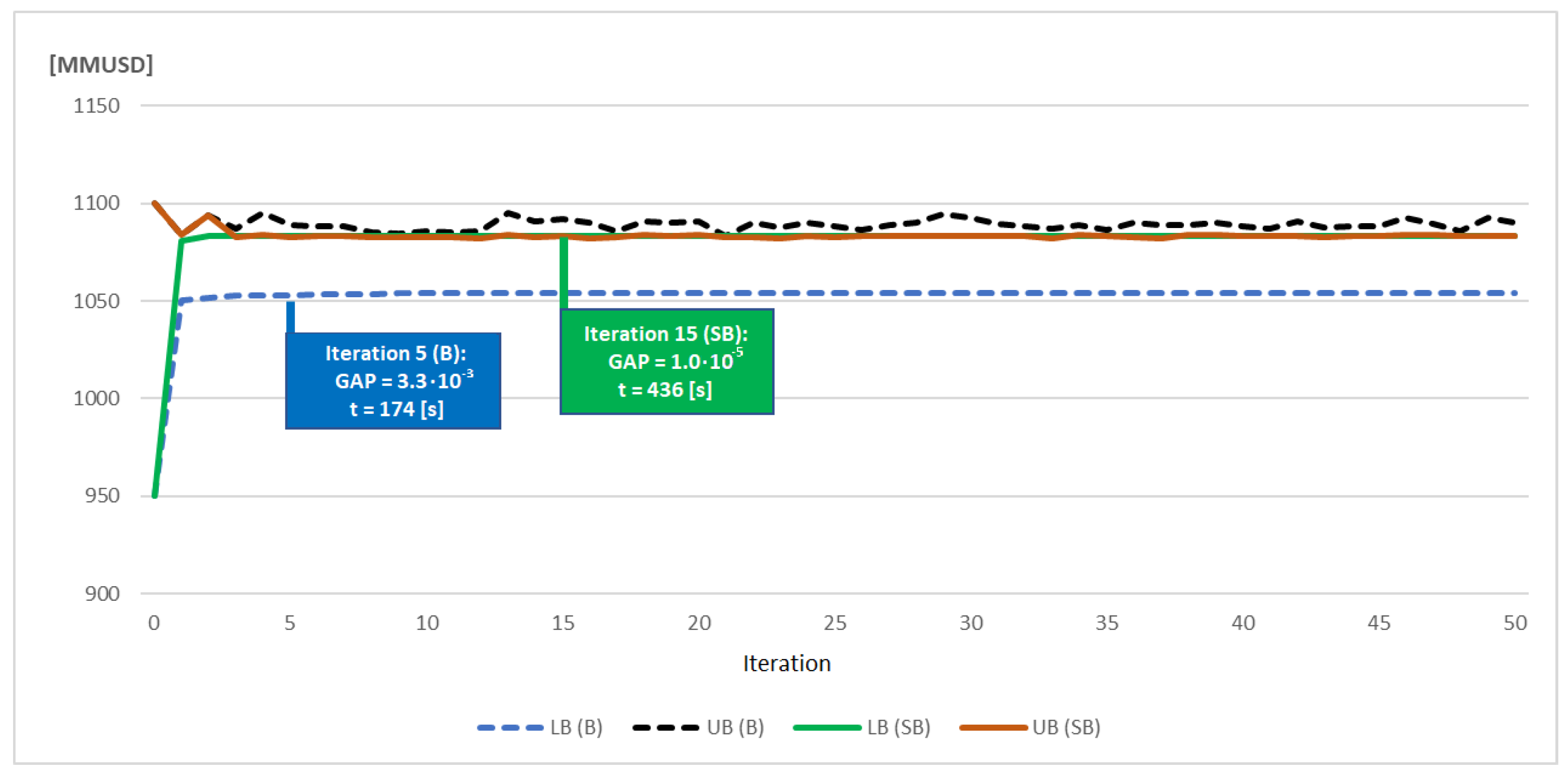
- Benders cuts: This type of cut does not meet the convergence criteria in the two test systems. However, the relative gap stagnates at its final value with a low count of iterations: 11% at iteration 8 after 100 s and 3% at iteration 5 after 174 s. This makes sense because this cut uses linear relaxations of the original problem, which involves more differences in case there are a lot of integer variables. Based on the above, it is proven that this type of cut does not accomplish the tight conditions.
- Integer Optimality cuts: This cut is the fastest to iterate, completing 50 iterations in just 281 s for solving the IEEE-6 bus system. Nevertheless, the relative gap could not get better than 85% and 89% for the first and second power systems, respectively. Despite this type of cut ensuring a feasible solution, using only Integer Optimality cuts would not be enough to obtain an optimal value.
- Strengthened Benders cuts: This is the only type of cut that could meet the convergence criteria. Using the SDDiP methodology, this type of cut reduces the simulation times to 75% and ∼81% than using the EF methodology.
5.2. Results of Case II
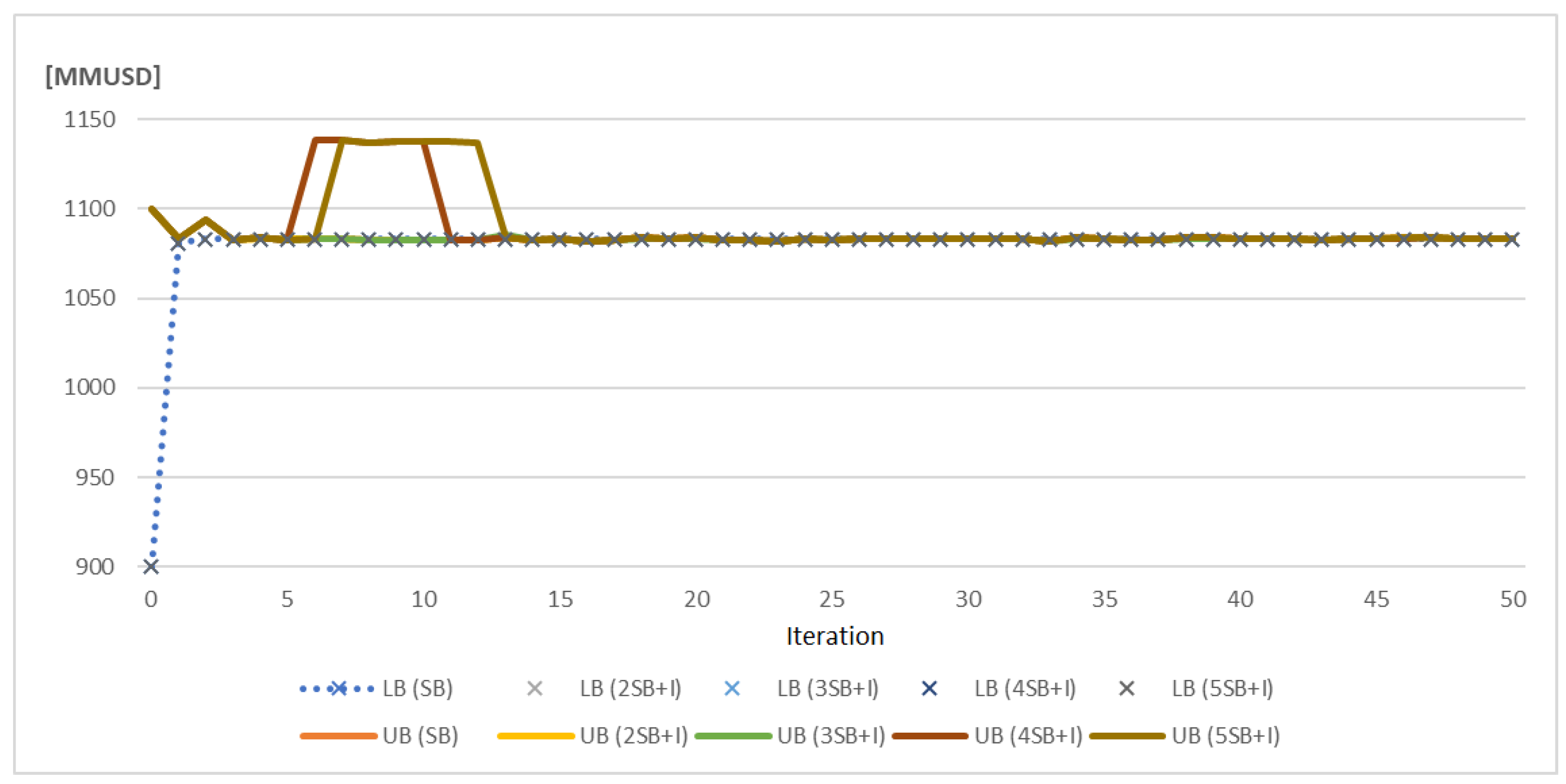
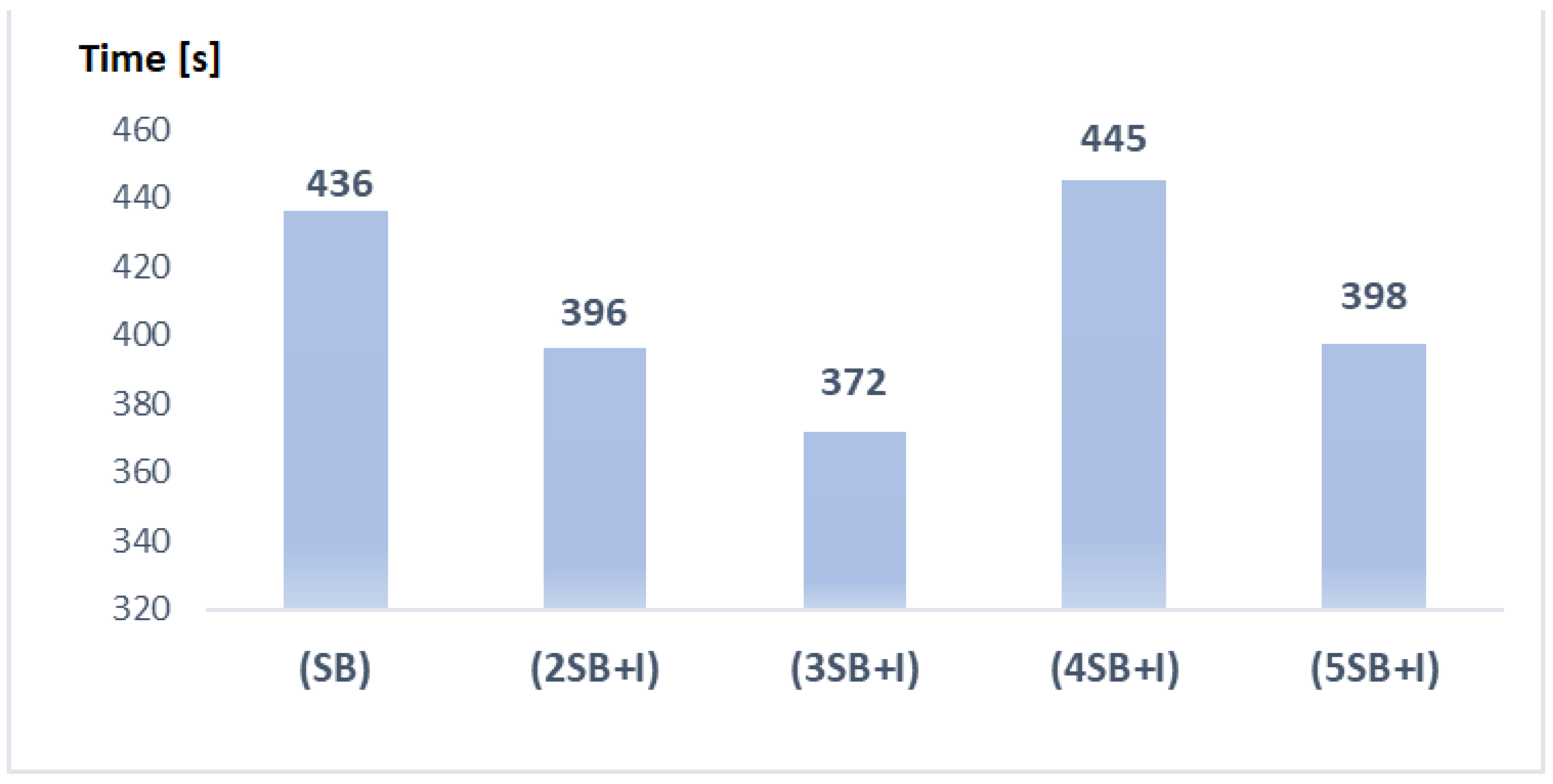
5.3. Results of Case III
- 2SB+I: pattern of 3 cuts, where 2 are (SB) and 1 is (I)
- 3SB+I: pattern of 4 cuts, where 3 are (SB) and 1 is (I)
- 4SB+I: pattern of 5 cuts, where 4 are (SB) and 1 is (I)
- 5SB+I: pattern of 6 cuts, where 5 are (SB) and 1 is (I).
6. Conclusions and Further Research
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations and Nomenclature
| EF | Extended Formulation |
| GTCEP | Generation and Transmission Capacity Expansion Planning |
| IEEE | Institute of Electrical and Electronic Engineers |
| LB, UP | Lower and Upper bound, respectively |
| MILP | Mixed Integer Linear Program |
| NDA | Nested Decomposition Algorithm |
| SDDP | Stochastic Dual Dynamic Programming |
| SDDiP | Stochastic Dual Dynamic Integer Programming |
| B | Benders cuts |
| SB | Strengthened Benders cuts |
| I | Integer Optimality cuts |
| L | Lagrangian cuts |
| Parameters | |
| Annualized cost for generator g [USD/MW] | |
| Variable cost of generator g [USD/MWh] | |
| Value of Unserved Energy [USD/MWh] | |
| Scalar for representative day d of planning year y | |
| Spin-up reserve requirement [MW] | |
| Annualized cost of line [USD/MW] | |
| Period discount factor | |
| Max capacity of thermal generator g [MW] | |
| Min stable level of generation of thermal generator g [MW] | |
| Max capacity of thermal generator g after sincronization [MW] | |
| Rating for renewable farm g, for scenario s, for year y, for representative day d, for hour t | |
| Max Ramp Up rate for thermal generator g | |
| Max Ramp Down rate for thermal generator g | |
| Load demand in the node k, for scenario s, for year y, for representative day d, for hour t | |
| Number of existing circuits in line | |
| Max flow of line | |
| Susceptance of line | |
| Disjunctive parameter | |
| Max angle for nodes | |
| Max circuits of line to build in the planning horizon | |
| Max units of generator g to build in the planning horizon | |
| i | Discount rate |
| Probability of scenario s | |
| Sets | |
| Existing thermal generators | |
| Existing renewable generators | |
| Candidate thermal generators | |
| Candidate renewable generators | |
| Nodes | |
| Transmission lines | |
| S | Scenarios of renewable profiles |
| Y | Candidate transmission lines |
| Representative days of the year | |
| T | Hours of the representative day |
| Years of the planning horizon | |
| Variables | |
| Generation of thermal generator g, scenario s, year y, representative day d, hour t | |
| Generation of renewable farm g, scenario s, year y, representative day d, hour t | |
| Base flow in line , scenario s, year y, representative day d, hour t | |
| Flow in line , scenario s, year y, representative day d, hour t | |
| Units built of thermal generator g scenario s, year y | |
| Units built of renewable farm g scenario s, year y | |
| Decision to invest on a new circuit of line , scenario s, year y | |
| Unserved Energy in node k, scenario s, year y, representative day d, hour t | |
| Angle in node k, scenario s, year y, representative day d, hour t | |
| Spin-up reserve provision by generator g, scenario s, year y, representative day d, hour t | |
| Operational state (on-off) of generator g, scenario s, year y, representative day d, hour t | |
| Starts of generator g, scenario s, year y, representative day d, hour t | |
| Shutdowns of generator g, scenario s, year y, representative day d, hour t |
References
- Peng, Q.; Liu, W.; Shi, Y.; Dai, Y.; Yu, K.; Graham, B. Multi-Objective Electricity Generation Expansion Planning towards Renewable Energy Policy Objectives under Uncertainties. 2023. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4584199 (accessed on 1 March 2024).
- Wei, Z.; Yang, L.; Chen, S.; Ma, Z.; Zang, H.; Fei, Y. A multi-stage planning model for transitioning to low-carbon integrated electric power and natural gas systems. Energy 2022, 254, 124361. [Google Scholar] [CrossRef]
- Abdin, A.F.; Caunhye, A.; Zio, E.; Cardin, M.A. Optimizing generation expansion planning with operational uncertainty: A multistage adaptive robust approach. Appl. Energy 2022, 306, 118032. [Google Scholar] [CrossRef]
- Wyrwa, A.; Suwała, W.; Pluta, M.; Raczyński, M.; Zyśk, J.; Tokarski, S. A new approach for coupling the short-and long-term planning models to design a pathway to carbon neutrality in a coal-based power system. Energy 2022, 239, 122438. [Google Scholar] [CrossRef]
- Li, C.; Conejo, A.J.; Siirola, J.D.; Grossmann, I.E. On representative day selection for capacity expansion planning of power systems under extreme operating conditions. Int. J. Electr. Power Energy Syst. 2022, 137, 107697. [Google Scholar] [CrossRef]
- Li, C.; Grossmann, I.E. A review of stochastic programming methods for optimization of process systems under uncertainty. Front. Chem. Eng. 2021, 2, 34. [Google Scholar] [CrossRef]
- Wang, B.; Wang, X.; Wei, F.; Shao, C.; Zhou, J.; Lin, J. Multi-stage stochastic planning for a long-term low-carbon transition of island power system considering carbon price uncertainty and offshore wind power. Energy 2023, 282, 128349. [Google Scholar] [CrossRef]
- Zhang, H.; Domènech, È.M.; Grossmann, I.E.; Tomasgard, A. Decomposition Methods for Multi-Horizon Stochastic Programming. 2023. Available online: https://www.researchsquare.com/article/rs-3258743/v2 (accessed on 1 March 2024).
- Hou, S.; Fan, Y.; Yi, B.W. Long-term renewable electricity planning using a multistage stochastic optimization with nested decomposition. Comput. Ind. Eng. 2021, 161, 107636. [Google Scholar] [CrossRef]
- Li, C.; Conejo, A.J.; Liu, P.; Omell, B.P.; Siirola, J.D.; Grossmann, I.E. Mixed-integer linear programming models and algorithms for generation and transmission expansion planning of power systems. Eur. J. Oper. Res. 2022, 297, 1071–1082. [Google Scholar] [CrossRef]
- Mazzi, N.; Grothey, A.; McKinnon, K.; Sugishita, N. Benders decomposition with adaptive oracles for large scale optimization. Math. Program. Comput. 2021, 13, 683–703. [Google Scholar] [CrossRef]
- Zhang, H.; Mazzi, N.; McKinnon, K.; Nava, R.G.; Tomasgard, A. A stabilised Benders decomposition with adaptive oracles applied to investment planning of multi-region power systems with short-term and long-term uncertainty. arXiv 2022, arXiv:2209.03471. [Google Scholar]
- Zhang, H.; Grossmann, I.E.; Knudsen, B.R.; McKinnon, K.; Nava, R.G.; Tomasgard, A. Integrated investment, retrofit and abandonment planning of energy systems with short-term and long-term uncertainty using enhanced Benders decomposition. arXiv 2023, arXiv:2303.09927. [Google Scholar]
- Laporte, G.; Louveaux, F.V. The integer L-shaped method for stochastic integer programs with complete recourse. Oper. Res. Lett. 1993, 13, 133–142. [Google Scholar] [CrossRef]
- Zou, J.; Ahmed, S.; Sun, X.A.; Stewart, H.M. Nested decomposition of multistage stochastic integer programs with binary state variables. Optim. Online 2016, 5436, 34. [Google Scholar]
- Gil, E.; Aravena, I.; Cárdenas, R. Generation Capacity Expansion Planning Under Hydro Uncertainty Using Stochastic Mixed Integer Programming and Scenario Reduction. IEEE Trans. Power Syst. 2015, 30, 1838–1847. [Google Scholar] [CrossRef]
- Hinojosa, V.H.; Sepúlveda, J. Solving the Stochastic Generation and Transmission Capacity Planning Problem Applied to Large-Scale Power Systems Using Generalized Shift-Factors. Energies 2020, 13, 3327. [Google Scholar] [CrossRef]
- Morales-España, G.; Latorre, J.M.; Ramos, A. Tight and compact MILP formulation for the thermal unit commitment problem. IEEE Trans. Power Syst. 2013, 28, 4897–4908. [Google Scholar] [CrossRef]
- Bertsekas, D. Abstract Dynamic Programming; Athena Scientific: Nashua, NH, USA, 2022. [Google Scholar]
- Ma, Q.; Stachurski, J. Dynamic programming deconstructed: Transformations of the Bellman equation and computational efficiency. Oper. Res. 2021, 69, 1591–1607. [Google Scholar] [CrossRef]
- Zou, J.; Ahmed, S.; Sun, X.A. Stochastic dual dynamic integer programming. Math. Program. 2019, 175, 461–502. [Google Scholar] [CrossRef]
- Benders, J. Partitioning procedures for solving mixed-variables programming problems. Numer. Math. 1962, 4, 238–252. [Google Scholar] [CrossRef]
- Thomé, F.S. Application of Decomposition Technique with Evaluation of Implicit Multipliers in Electrical Systems Generation and Network Expansion Planning. Ph.D. Thesis, Dissertação de Mestrado, COPPE/UFRJ, Rio de Janeiro, Brazil, 2008. (In Portuguese). [Google Scholar]
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. MATPOWER: Steady-state operations, planning, and analysis tools for power systems research and education. IEEE Trans. Power Syst. 2010, 26, 12–19. [Google Scholar] [CrossRef]
- Data Tables. Available online: https://docs.google.com/spreadsheets/d/1L4fbv8qo41Kgz8n9ycY5un7G5JYrbcbeeNKng7zz6yg/ (accessed on 5 October 2023).
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V.B. Julia: A fresh approach to numerical computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef]
- Lubin, M.; Dowson, O.; Garcia, J.D.; Huchette, J.; Legat, B.; Vielma, J.P. JuMP 1.0: Recent improvements to a modeling language for mathematical optimization. Math. Program. Comp. 2023, 15, 581–589. [Google Scholar] [CrossRef]
- Dowson, O.; Kapelevich, L. SSDDP.jl: A Julia Package for Stochastic Dual Dynamic Programming. INFORMS J. Comp. 2020, 33, 27–33. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | (B) | (I) | (L) | (SB) |
|---|---|---|---|---|
| Valid | Yes | Yes | Yes | Yes |
| Tight | No | Yes | Yes | No |
| Finite | Yes | Yes | Yes | Yes |
| Plant | State | Bus | Minimum Generation | Maximum Generation | Variable Cost | Ramp Up/Down | Investment Cost | Max Number of Units |
|---|---|---|---|---|---|---|---|---|
| Gas-1 | Existing | 1 | 22.5 | 30 | 35 | 15 | - | - |
| Gas-2 | Existing | 1 | 22.5 | 30 | 35 | 15 | - | - |
| Gas-3 | Existing | 1 | 22.5 | 30 | 35 | 15 | - | - |
| Gas-4 | Existing | 1 | 60 | 80 | 30 | 30 | - | - |
| Gas-5 | Existing | 3 | 39 | 60 | 50 | 30 | - | - |
| Gas-6 | Existing | 3 | 39 | 60 | 50 | 30 | - | - |
| Gas-cand-1 | Candidate | 6 | 90 | 120 | 30 | 40 | 2500 | 1 |
| Gas-cand-2 | Candidate | 6 | 180 | 240 | 30 | 30 | 3500 | 2 |
| Coal-cand-1 | Candidate | 3 | 24 | 120 | 80 | 20 | 3000 | 3 |
| Diesel-cand | Candidate | 5 | 48 | 240 | 180 | 35 | 500 | 2 |
| Coal-cand-2 | Candidate | 2 | 130 | 200 | 40 | 30 | 3000 | 3 |
| Farm | State | Bus | Maximum Generation | Investment Cost | Max Number of Units |
|---|---|---|---|---|---|
| Sol | Existing | 1 | 30 | - | - |
| Eolico-1 | Existing | 3 | 30 | - | - |
| Eolico-2 | Existing | 5 | 30 | - | - |
| Sol-cand-1 | Candidate | 4 | 30 | 2000 | 1 |
| Sol-cand-2 | Candidate | 6 | 30 | 2000 | 1 |
| Eolico-cand | Candidate | 2 | 30 | 2000 | 1 |
| Line | Bus from | Bus to | State | 1/Susceptance 1/ | Max Flow | Investment Cost |
|---|---|---|---|---|---|---|
| 1 | 1 | 2 | Existing | 0.40 | 100 | 40 |
| 2 | 1 | 4 | Existing | 0.60 | 80 | 60 |
| 3 | 1 | 5 | Existing | 0.20 | 100 | 20 |
| 4 | 2 | 3 | Existing | 0.20 | 100 | 20 |
| 5 | 2 | 4 | Existing | 0.40 | 100 | 40 |
| 6 | 3 | 5 | Existing | 0.20 | 100 | 20 |
| 7 | 1 | 3 | Candidate | 0.38 | 100 | 38 |
| 8 | 1 | 6 | Candidate | 0.68 | 70 | 68 |
| 9 | 2 | 5 | Candidate | 0.31 | 100 | 31 |
| 10 | 2 | 6 | Candidate | 0.30 | 100 | 30 |
| 11 | 3 | 4 | Candidate | 0.59 | 82 | 59 |
| 12 | 3 | 6 | Candidate | 0.48 | 100 | 48 |
| 13 | 4 | 5 | Candidate | 0.63 | 75 | 63 |
| 14 | 4 | 6 | Candidate | 0.30 | 100 | 30 |
| 15 | 5 | 6 | Candidate | 0.61 | 78 | 61 |
| Year | Load Demand (Year) [GWh] |
|---|---|
| 1 | 5920 |
| 2 | 7893 |
| 3 | 10,524 |
| 4 | 14,033 |
| 5 | 18,710 |
| Bus | Participation Factor [%] |
|---|---|
| 1 | 11 |
| 2 | 31 |
| 3 | 6 |
| 4 | 21 |
| 5 | 31 |
| 6 | 0 |
| (a) IEEE-6 Bus Test System. | |||
|---|---|---|---|
| Converged | No | No | Yes |
| Time [s] | (100 *) | - | 998 |
| No iterations | 50 (8 *) | 50 | 32 |
| Solution value [MMUSD] | 48,865.8 | 6245.0 | 53,913.8 |
| Relative Gap | 11% | 85% | 0% |
| (b) IEEE-24 Bus Test System. | |||
| Converged | No | No | Yes |
| Time [s] | (174 *) | - | 436 |
| No iterations | 50 (5 *) | 50 | 15 |
| Solution value [1000 MMUSD] | 1054.3 | 92.1 | 1083.2 |
| Relative Gap | 3% | 89% | 0% |
| Item | SB | 2SB+I | 3SB+I | 4SB+I | 5SB+I |
|---|---|---|---|---|---|
| Converged | Yes | Yes | Yes | Yes | Yes |
| Relative Gap | |||||
| Time [s] | 998 | 924 | 922 | 1302 | 1594 |
| No iterations | 32 | 37 | 33 | 50 | 49 |
| Item | SB | 2SB+I | 3SB+I | 4SB+I | 5SB+I |
|---|---|---|---|---|---|
| Converged | Yes | Yes | Yes | Yes | Yes |
| Relative Gap | |||||
| Time [s] | 436 | 396 | 372 | 445 | 398 |
| No iterations | 15 | 15 | 15 | 15 | 15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vergara, C.; Gil, E.; Hinojosa, V. Generation and Transmission Expansion Planning Using a Nested Decomposition Algorithm. Energies 2024, 17, 1509. https://doi.org/10.3390/en17071509
Vergara C, Gil E, Hinojosa V. Generation and Transmission Expansion Planning Using a Nested Decomposition Algorithm. Energies. 2024; 17(7):1509. https://doi.org/10.3390/en17071509
Chicago/Turabian StyleVergara, Carlos, Esteban Gil, and Victor Hinojosa. 2024. "Generation and Transmission Expansion Planning Using a Nested Decomposition Algorithm" Energies 17, no. 7: 1509. https://doi.org/10.3390/en17071509
APA StyleVergara, C., Gil, E., & Hinojosa, V. (2024). Generation and Transmission Expansion Planning Using a Nested Decomposition Algorithm. Energies, 17(7), 1509. https://doi.org/10.3390/en17071509