Disturbance Observer-Based Robust Cooperative Adaptive Cruise Control Approach under Heterogeneous Vehicle


Abstract
1. Introduction
- The proposed method gives the design solution for the CACC without considering the varying and unknown parameters of a heterogeneous vehicle.
- The string stability of the CACC is maintained by applying the proposed disturbance observer.
- Vehicle vendors can implement the standard CACC on every heterogeneous vehicle.
2. System Modeling
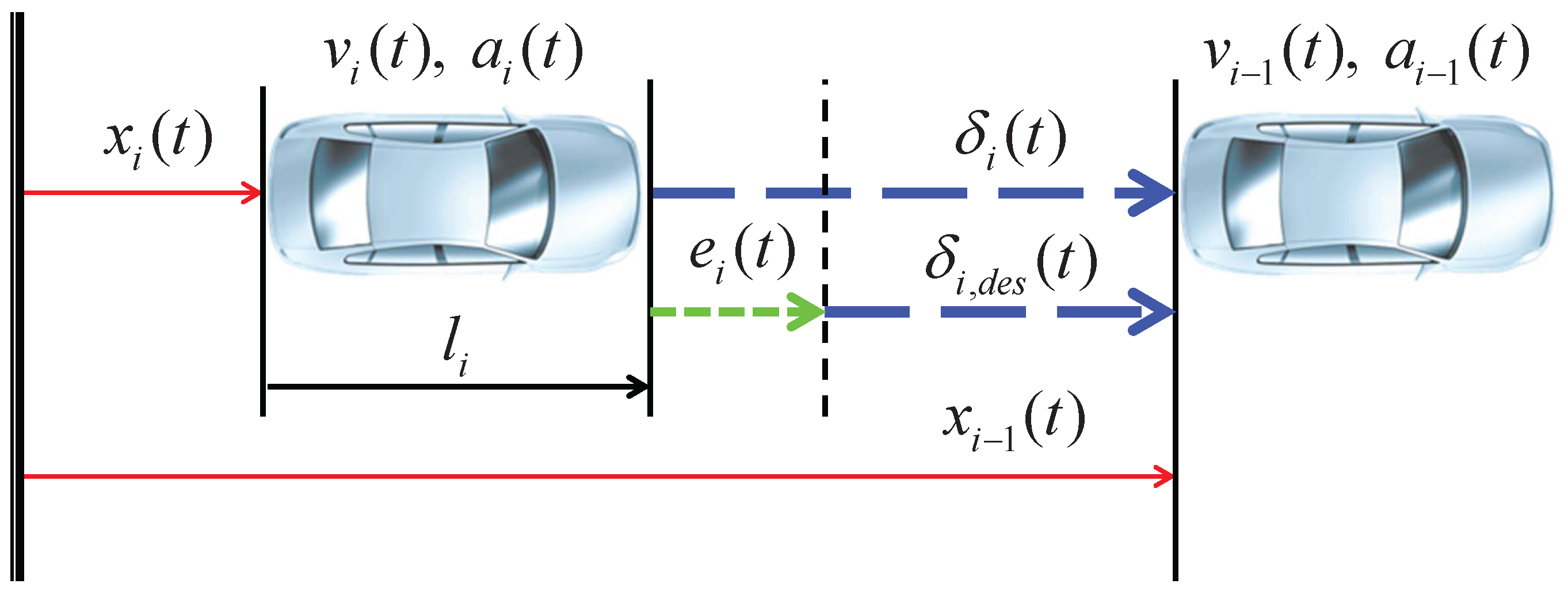
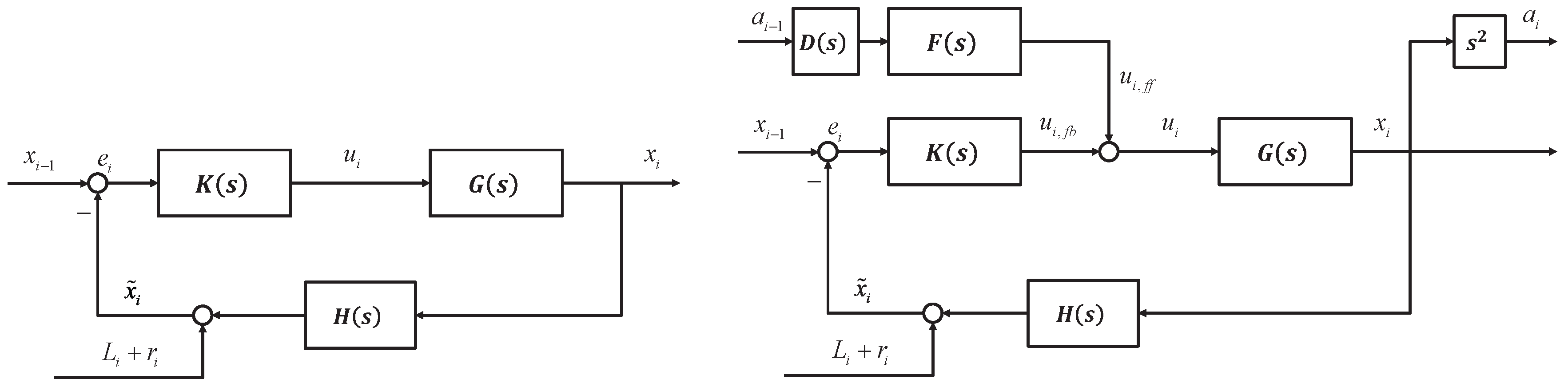
2.1. Adaptive Cruise Control
2.2. Cooperative Adaptive Cruise Control
3. String Stability Analysis
3.1. String Stability in the Ideal Case
3.2. String Stability with Uncertainty
4. Robust Cooperative Adaptive Cruise Control
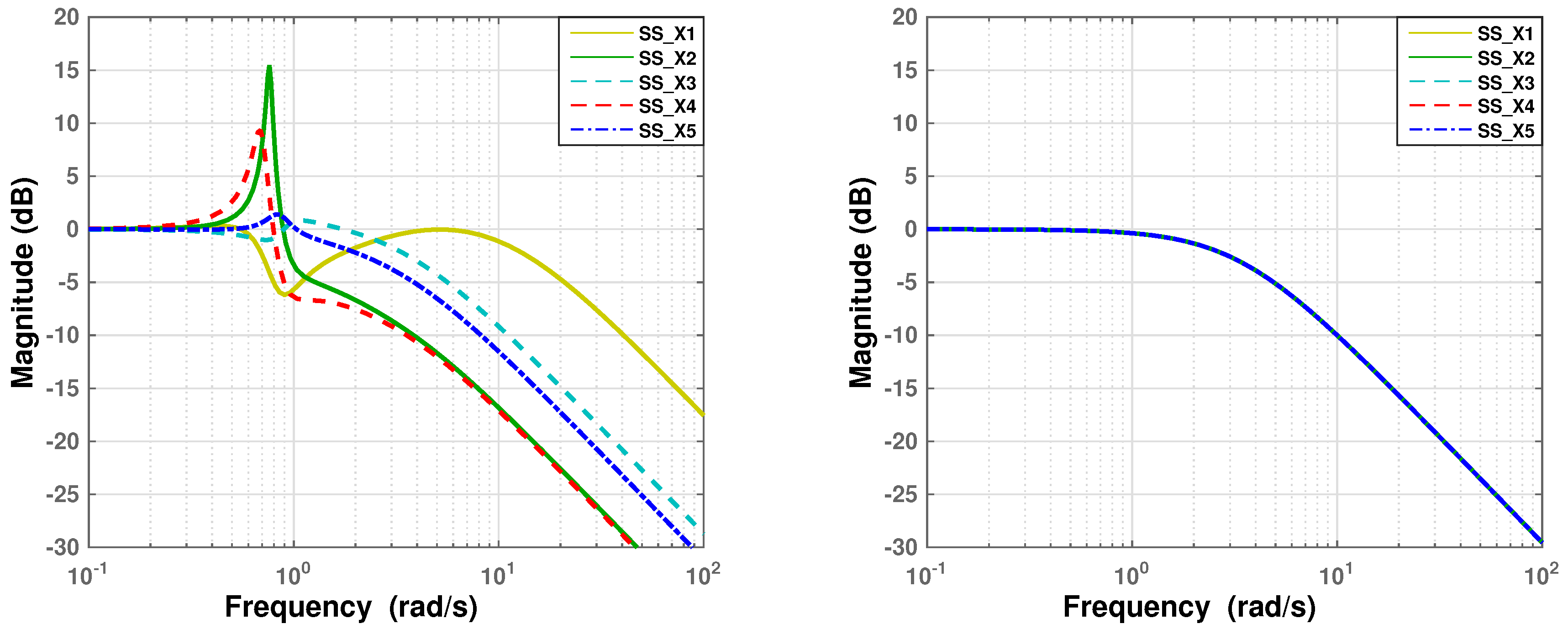
4.1. String Stability with DOB
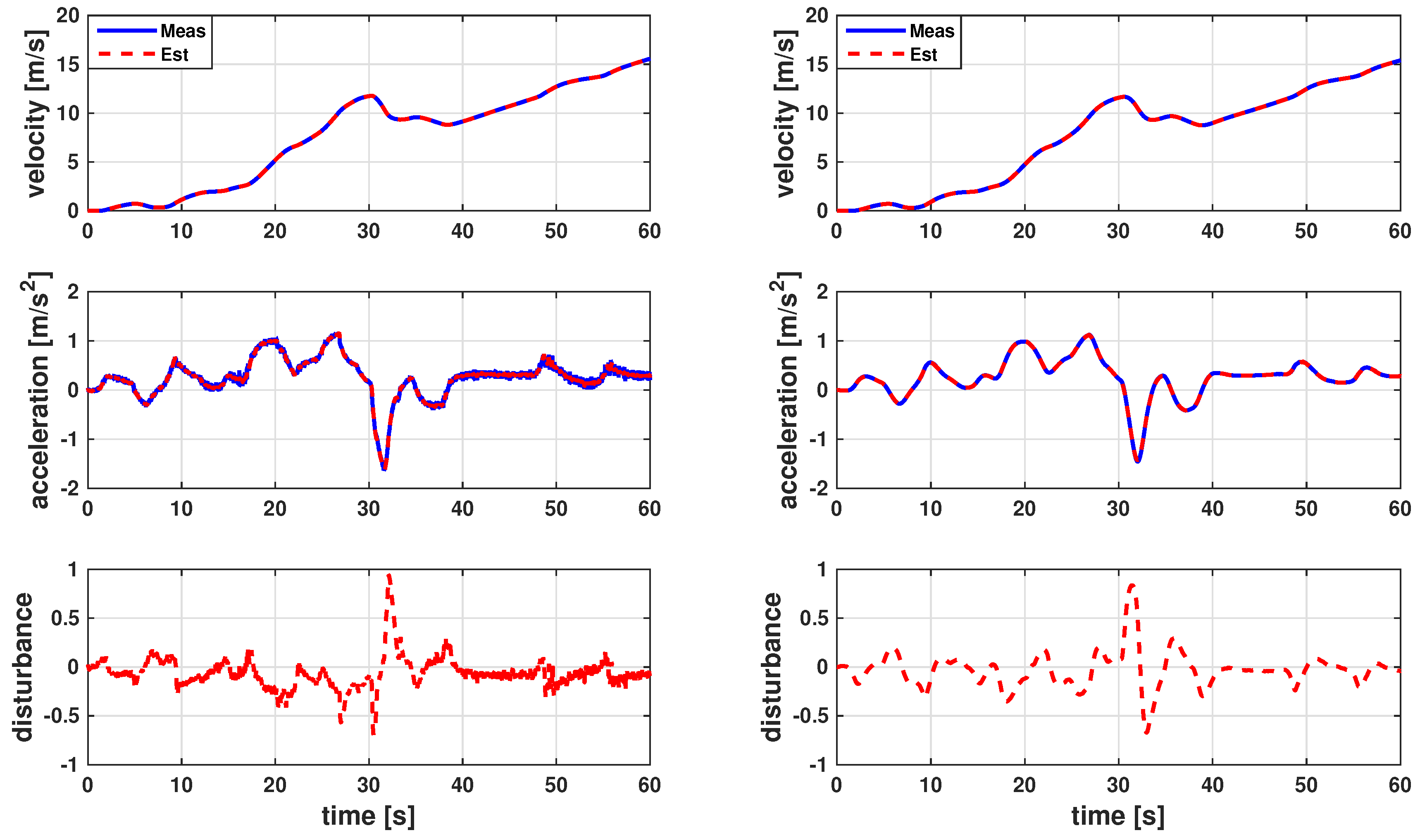
4.2. Convergence of DOB
5. Application Results
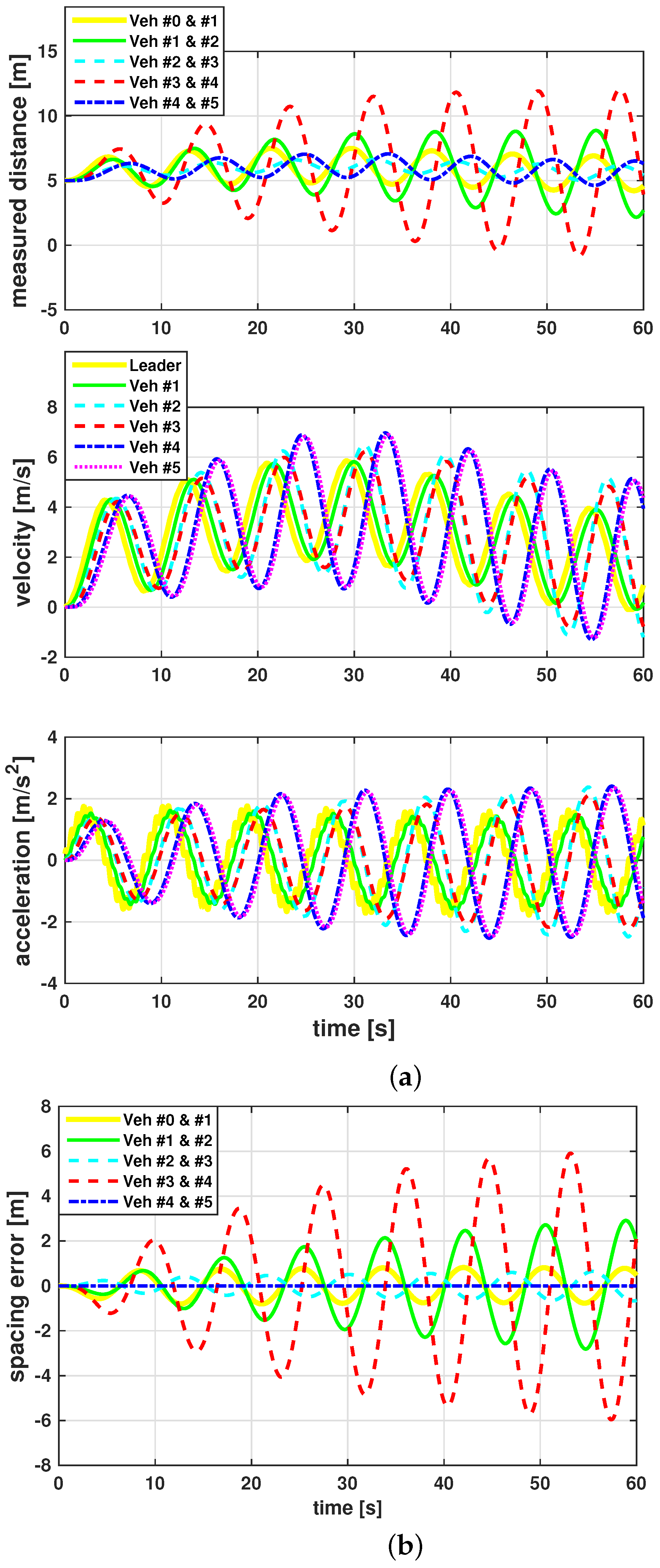
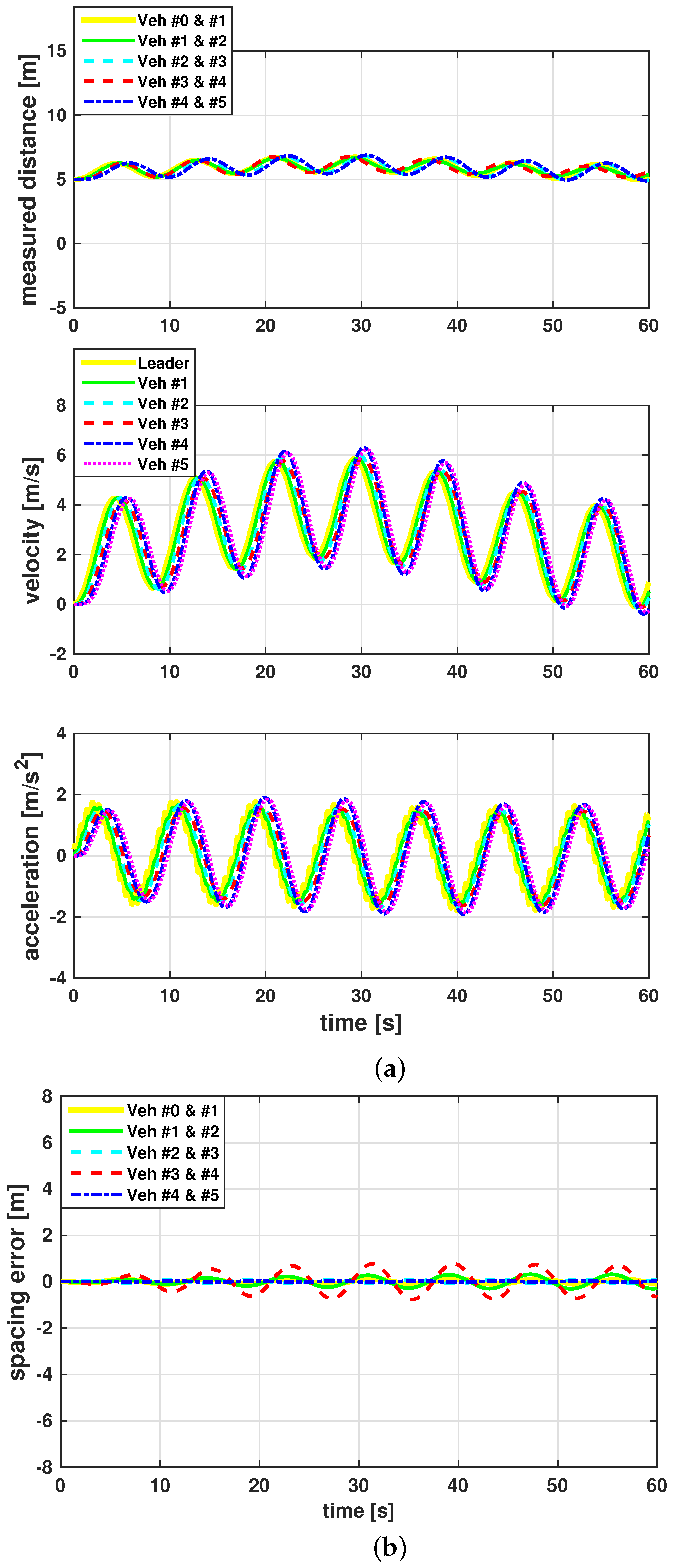
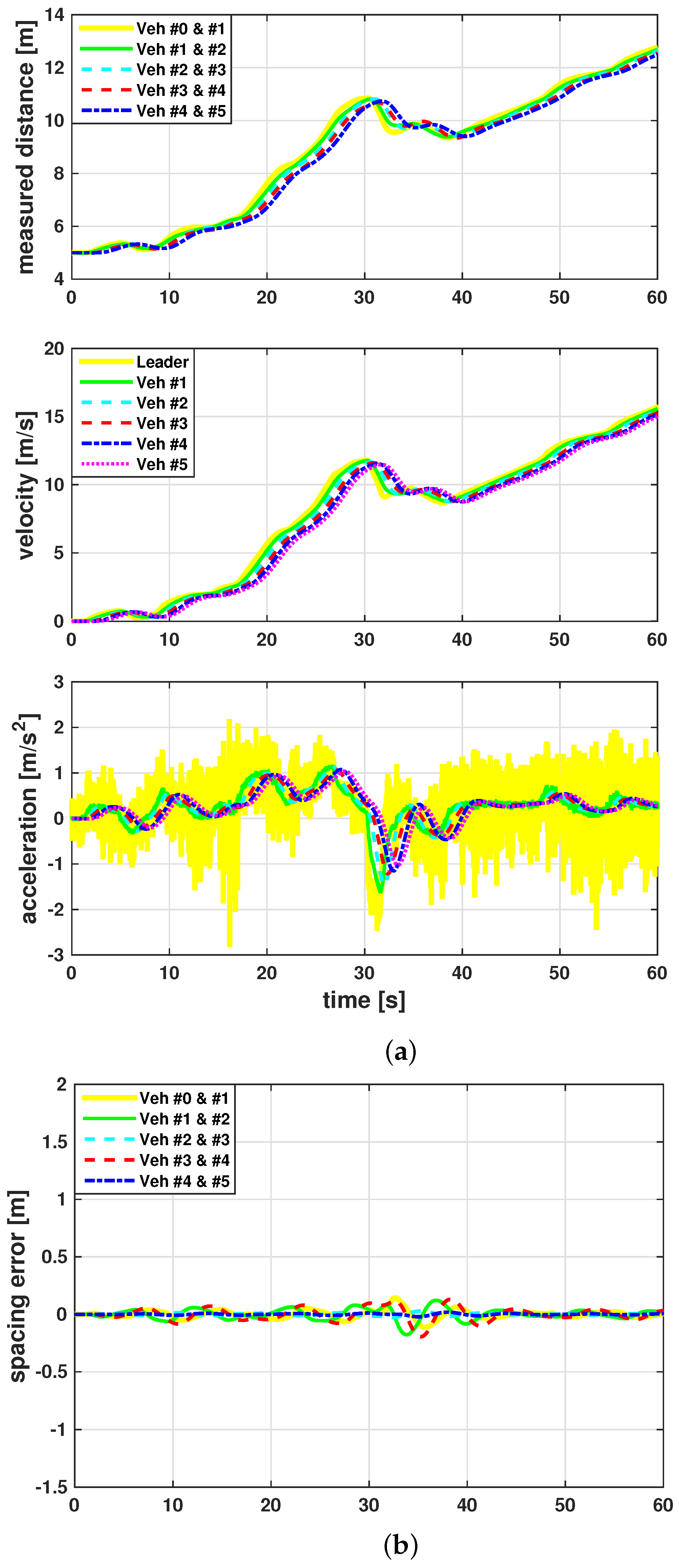
5.1. Computational Simulation
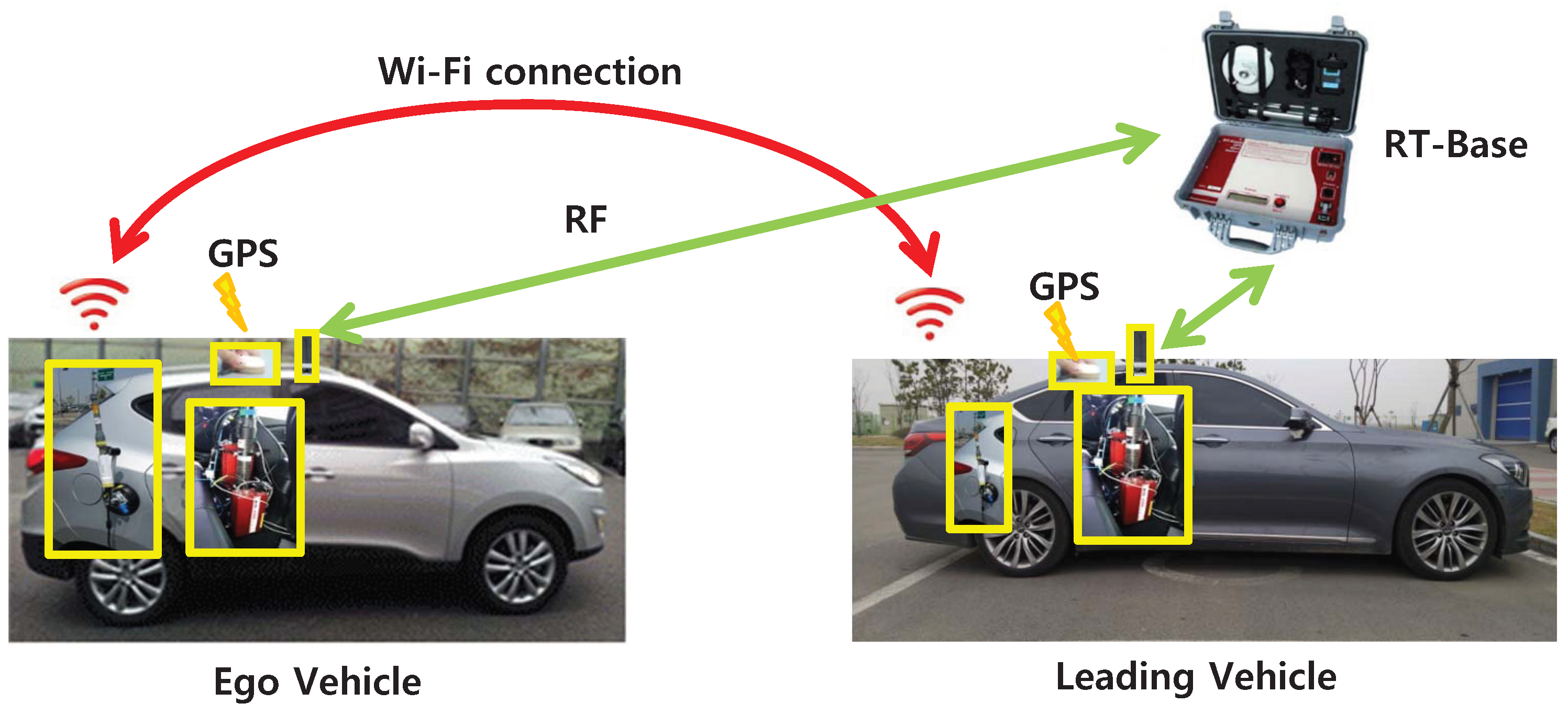
5.2. Experimental Evaluation
6. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shladover, S.E.; Desoer, C.A.; Hedrick, J.K.; Tomizuka, M.; Walrand, J.; Zhang, W.B.; McMahon, D.H.; Peng, H.; Sheikholeslam, S.; McKeown, N. Automated vehicle control developments in the PATH program. IEEE Trans. Veh. Technol. 1991, 40, 114–130. [Google Scholar] [CrossRef]
- Wang, J.; Rajamani, R. Adaptive cruise control system design and its impact on highway traffic flow. In Proceedings of the American Control Conference, Anchorage, AK, USA, 8–10 May 2002; Volume 5, pp. 3690–3695. [Google Scholar]
- Moon, S.; Yi, K. Human driving data-based design of a vehicle adaptive cruise control algorithm. Veh. Syst. Dyn. 2008, 46, 661–690. [Google Scholar] [CrossRef]
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Batkovic, I.; Zanon, M.; Ali, M.; Falcone, P. Real-time constrained trajectory planning and vehicle control for proactive autonomous driving with road users. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 256–262. [Google Scholar]
- Choi, S.B.; Hedrick, J. Vehicle longitudinal control using an adaptive observer for automated highway systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995; Volume 5, pp. 3106–3110. [Google Scholar]
- Swaroop, D.; Hedrick, J.K.; Choi, S.B. Direct adaptive longitudinal control of vehicle platoons. IEEE Trans. Veh. Technol. 2001, 50, 150–161. [Google Scholar] [CrossRef]
- Vahidi, A.; Eskandarian, A. Research advances in intelligent collision avoidance and adaptive cruise control. IEEE Trans. Intell. Transp. Syst. 2003, 4, 143–153. [Google Scholar] [CrossRef]
- Bozzi, A.; Zero, E.; Sacile, R.; Bersani, C. Real-time Robust Trajectory Control for Vehicle Platoons: A Linear Matrix Inequality-based Approach. In Proceedings of the ICINCO, Paris, France, 6–8 July 2021; pp. 410–415. [Google Scholar]
- Hedrick, J.; McMahon, D.; Narendran, V.; Swaroop, D. Longitudinal vehicle controller design for IVHS systems. In Proceedings of the American Control Conference, Boston, MA, USA, 26–28 June 1991; pp. 3107–3112. [Google Scholar]
- Sheikholeslam, S.; Desoer, C.A. Longitudinal control of a platoon of vehicles with no communication of lead vehicle information: A system level study. IEEE Trans. Veh. Technol. 1993, 42, 546–554. [Google Scholar] [CrossRef]
- Rajamani, R.; Choi, S.; Law, B.; Hedrick, J.; Prohaska, R.; Kretz, P. Design and experimental implementation of longitudinal control for a platoon of automated vehicles. J. Dyn. Syst. Meas. Control 2000, 122, 470–476. [Google Scholar] [CrossRef]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC). IEEE Trans. Intell. Transp. Syst. 2016, 17, 491–509. [Google Scholar] [CrossRef]
- Öncü, S.; Ploeg, J.; van de Wouw, N.; Nijmeijer, H. Cooperative adaptive cruise control: Network-aware analysis of string stability. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1527–1537. [Google Scholar] [CrossRef]
- Ploeg, J.; Scheepers, B.T.; Van Nunen, E.; Van de Wouw, N.; Nijmeijer, H. Design and experimental evaluation of cooperative adaptive cruise control. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 260–265. [Google Scholar]
- Xu, Q.; Sengupta, R. Simulation, analysis, and comparison of ACC and CACC in highway merging control. In Proceedings of the IEEE Intelligent Vehicles Symposium, Columbus, OH, USA, 9–11 June 2003; pp. 237–242. [Google Scholar]
- Van Arem, B.; Van Driel, C.J.; Visser, R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef]
- Naus, G.J.; Vugts, R.P.; Ploeg, J.; van de Molengraft, M.J.; Steinbuch, M. String-stable CACC design and experimental validation: A frequency-domain approach. IEEE Trans. Veh. Technol. 2010, 59, 4268–4279. [Google Scholar] [CrossRef]
- Liang, C.Y.; Peng, H. Optimal adaptive cruise control with guaranteed string stability. Veh. Syst. Dyn. 1999, 32, 313–330. [Google Scholar] [CrossRef]
- Nieuwenhuijze, M.R.; van Keulen, T.; Oncü, S.; Bonsen, B.; Nijmeijer, H. Cooperative driving with a heavy-duty truck in mixed traffic: Experimental results. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1026–1032. [Google Scholar] [CrossRef]
- Ploeg, J.; Van De Wouw, N.; Nijmeijer, H. Lp string stability of cascaded systems: Application to vehicle platooning. IEEE Trans. Control Syst. Technol. 2014, 22, 786–793. [Google Scholar] [CrossRef]
- Massera Filho, C.; Terra, M.H.; Wolf, D.F. Safe Optimization of Highway Traffic with Robust Model Predictive Control-Based Cooperative Adaptive Cruise Control. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3193–3203. [Google Scholar] [CrossRef]
- Graffione, S.; Bersani, C.; Sacile, R.; Zero, E. Non-linear mpc for longitudinal and lateral control of vehicle’s platoon with insert and exit manoeuvres. In Proceedings of the International Conference on Informatics in Control, Automation and Robotics, Paris, France, 7–9 July 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 497–518. [Google Scholar]
- Hult, R.; Zanon, M.; Gros, S.; Falcone, P. Optimal coordination of automated vehicles at intersections: Theory and experiments. IEEE Trans. Control Syst. Technol. 2018, 27, 2510–2525. [Google Scholar] [CrossRef]
- Naus, G.; Vugts, R.; Ploeg, J.; Van de Molengraft, M.; Steinbuch, M. Towards on-the-road implementation of cooperative adaptive cruise control. In Proceedings of the 16th World Congress and Exhibition on Intelligent Transport Systems and Services, Stockholm, Sweden, 21–25 September 2009. [Google Scholar]
- Di Bernardo, M.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Trans. Intell. Transp. Syst. 2015, 16, 102–112. [Google Scholar] [CrossRef]
- Zhang, L.; Orosz, G. Motif-based design for connected vehicle systems in presence of heterogeneous connectivity structures and time delays. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1638–1651. [Google Scholar] [CrossRef]
- Jin, I.G.; Orosz, G. Dynamics of connected vehicle systems with delayed acceleration feedback. Transp. Res. Part C Emerg. Technol. 2014, 46, 46–64. [Google Scholar]
- Harfouch, Y.A.; Yuan, S.; Baldi, S. An Adaptive Switched Control Approach to Heterogeneous Platooning with Inter-Vehicle Communication Losses. IEEE Trans. Control Netw. Syst. 2017, 5, 1434–1444. [Google Scholar] [CrossRef]
- Harfouch, Y.A.; Yuan, S.; Baldi, S. An Adaptive Approach to Cooperative Longitudinal Platooning of Heterogeneous Vehicles with Communication Losses. In Proceedings of the 20th IFAC World Congress, Toulouse, France, 17 July 2017; pp. 1382–1387. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Feng, S.; Zhang, Y.; Li, S.E.; Cao, Z.; Liu, H.X.; Li, L. String stability for vehicular platoon control: Definitions and analysis methods. Annu. Rev. Control 2019, 47, 81–97. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems; Addison-Wesley: Menlo Park, CA, USA, 1998; Volume 3. [Google Scholar]
- White, M.T.; Tomizuka, M.; Smith, C. Improved track following in magnetic disk drives using a disturbance observer. IEEE/ASME Trans. Mechatron. 2000, 5, 3–11. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.; Chen, W.H.; Chen, X. Generalized extended state observer based control for systems with mismatched uncertainties. IEEE Trans. Ind. Electron. 2012, 59, 4792–4802. [Google Scholar] [CrossRef]
- Ginoya, D.; Shendge, P.; Phadke, S. Sliding mode control for mismatched uncertain systems using an extended disturbance observer. IEEE Trans. Ind. Electron. 2014, 61, 1983–1992. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Z.; Tsao, T.C. Trajectory tracking and disturbance rejection for linear time-varying systems: Input/output representation. Syst. Control Lett. 2009, 58, 452–460. [Google Scholar] [CrossRef]
- Kim, W.; Shin, D.; Won, D.; Chung, C.C. Disturbance-observer-based position tracking controller in the presence of biased sinusoidal disturbance for electrohydraulic actuators. IEEE Trans. Control Syst. Technol. 2013, 21, 2290–2298. [Google Scholar] [CrossRef]
- Kim, W.; Shin, D.; Chung, C.C. Microstepping using a disturbance observer and a variable structure controller for permanent-magnet stepper motors. IEEE Trans. Ind. Electron. 2013, 60, 2689–2699. [Google Scholar] [CrossRef]
- RTv2 GNSS-Aided Inertial Measurement Systems User Manual. 2015. Available online: https://www.oxts.com/app/uploads/2018/02/rtman.pdf (accessed on 25 February 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Initial Position | h | |||
|---|---|---|---|---|---|
| Leader | 35 | 0.5 | 0.5 | 0.35 | 1 |
| 30 | 0.1 | 0.5 | 0.35 | 0.8 | |
| 25 | 1 | 0.5 | 0.35 | 0.9 | |
| 20 | 0.5 | 0.5 | 0.35 | 1.1 | |
| 15 | 0.8 | 0.5 | 0.35 | 0.7 | |
| 10 | 0.6 | 0.5 | 0.35 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, C.M. Disturbance Observer-Based Robust Cooperative Adaptive Cruise Control Approach under Heterogeneous Vehicle. Energies 2024, 17, 1429. https://doi.org/10.3390/en17061429
Kang CM. Disturbance Observer-Based Robust Cooperative Adaptive Cruise Control Approach under Heterogeneous Vehicle. Energies. 2024; 17(6):1429. https://doi.org/10.3390/en17061429
Chicago/Turabian StyleKang, Chang Mook. 2024. "Disturbance Observer-Based Robust Cooperative Adaptive Cruise Control Approach under Heterogeneous Vehicle" Energies 17, no. 6: 1429. https://doi.org/10.3390/en17061429
APA StyleKang, C. M. (2024). Disturbance Observer-Based Robust Cooperative Adaptive Cruise Control Approach under Heterogeneous Vehicle. Energies, 17(6), 1429. https://doi.org/10.3390/en17061429