
Aliasing Suppression Method for a Three-Phase Grid-Connected Photovoltaic Inverter Based on Multi-Sampling and Mean Filtering

Abstract
1. Introduction
2. Aliasing and Selective Harmonic Suppression Method
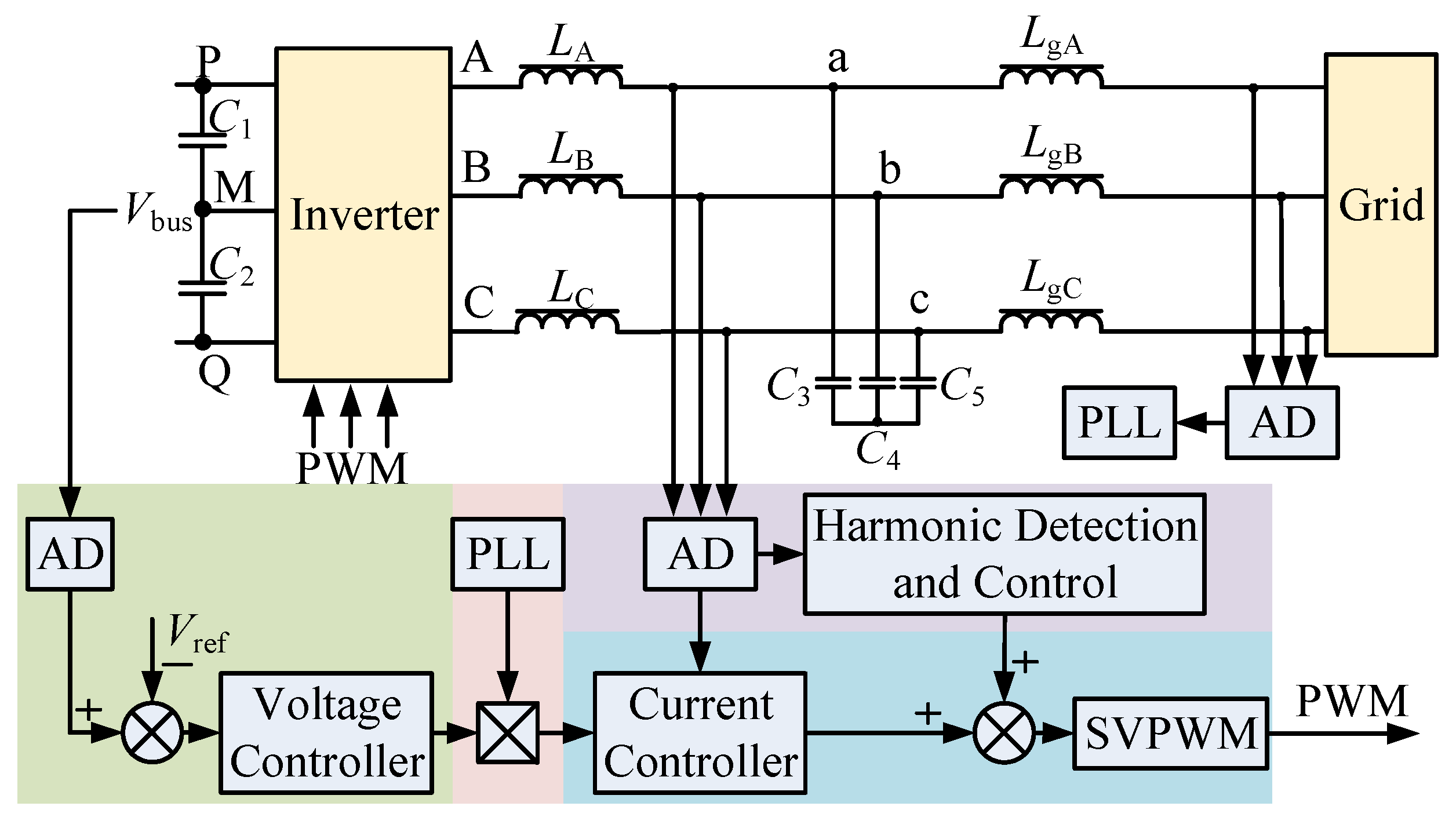
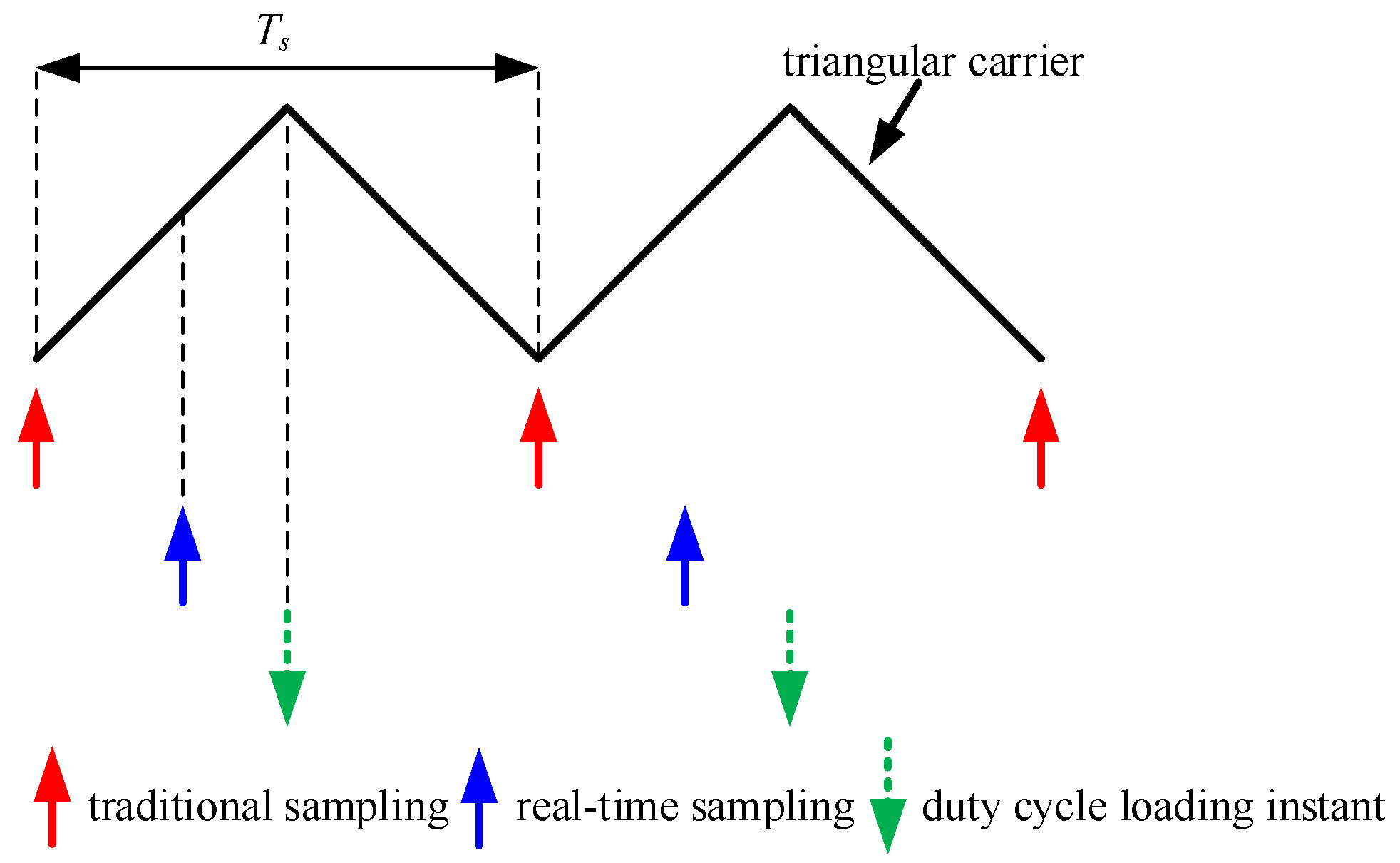
2.1. Aliasing in Digitally Controlled Inverters
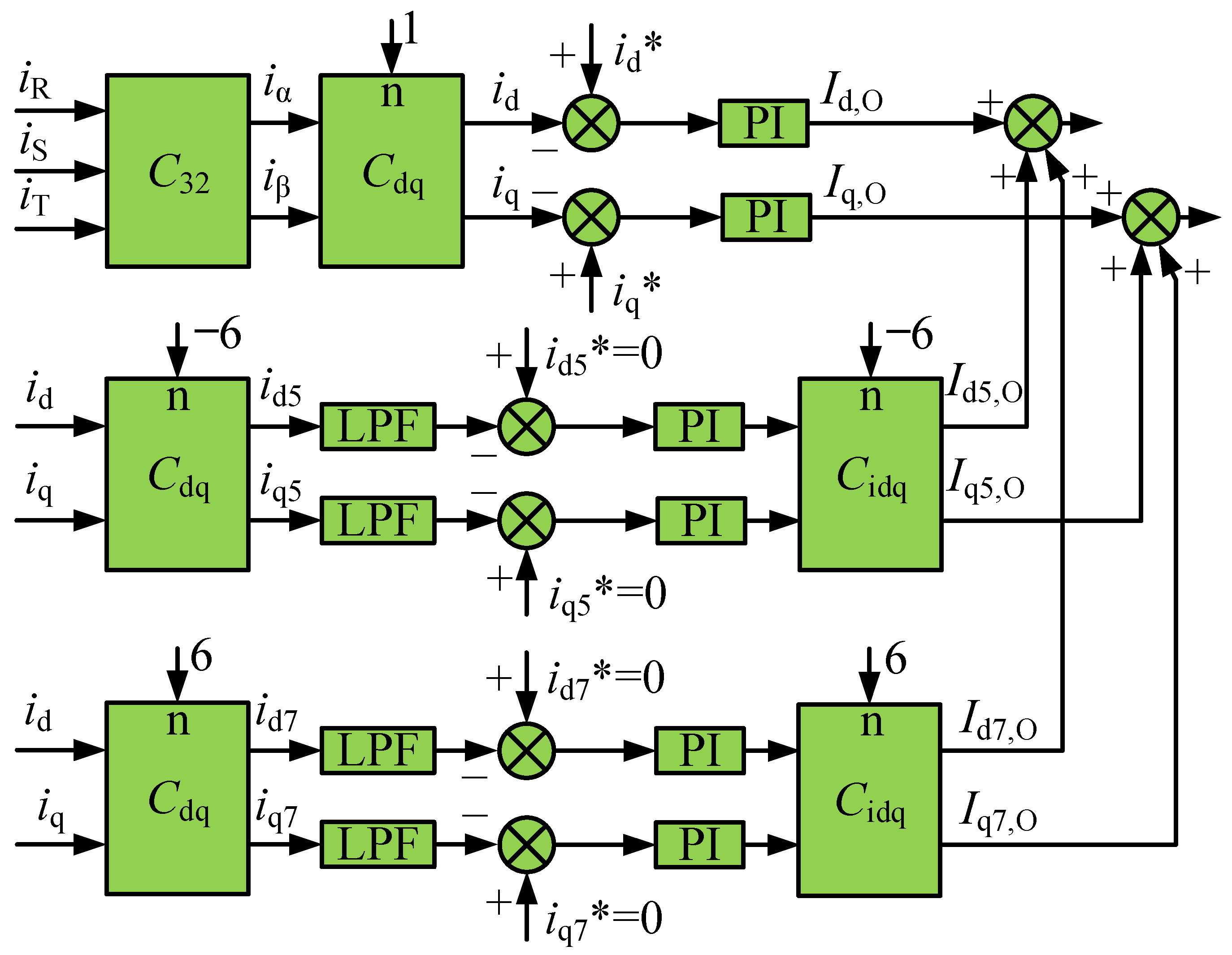
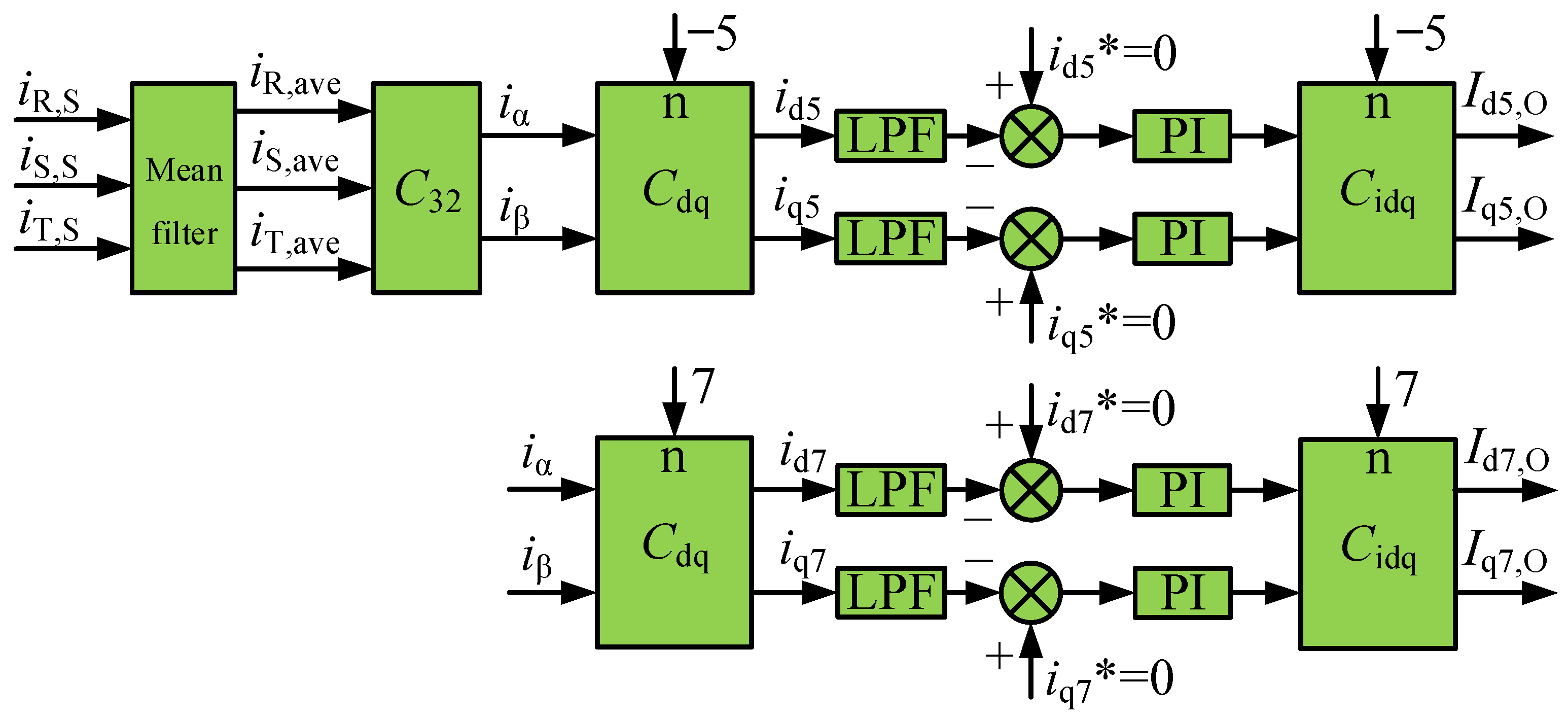
2.2. Selective Harmonic Detection and Control
3. Proposed Harmonic and Aliasing Suppression Method
3.1. Reconstruction of the Control Algorithm Based on Multi-Sampling and Mean Filtering
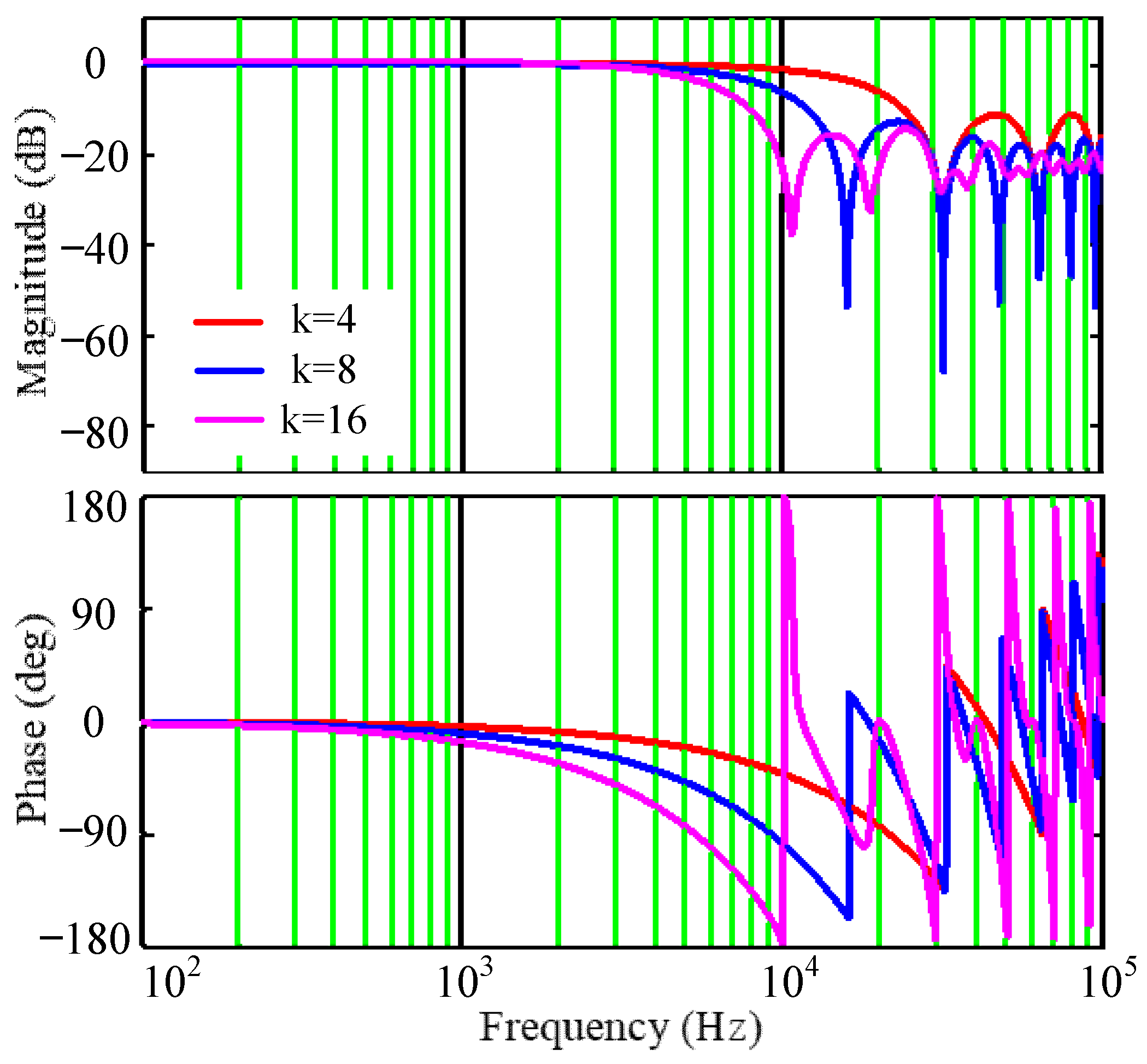
- Multi-sampling has a large attenuation ability for high-order harmonics, especially the switching frequency harmonics and their multiplier harmonics. Therefore, the influence of high-frequency components, switching frequency harmonics, and multiplied signals on sampling can be better avoided.
- The more times of multi-sampling, the lower the cutoff frequency of the filter.
- The greater the number of multi-sampling, the greater the delay of the system at half the switching frequency.
3.2. Comparison of Different Harmonic and Aliasing Suppression Methods
4. Simulation Results
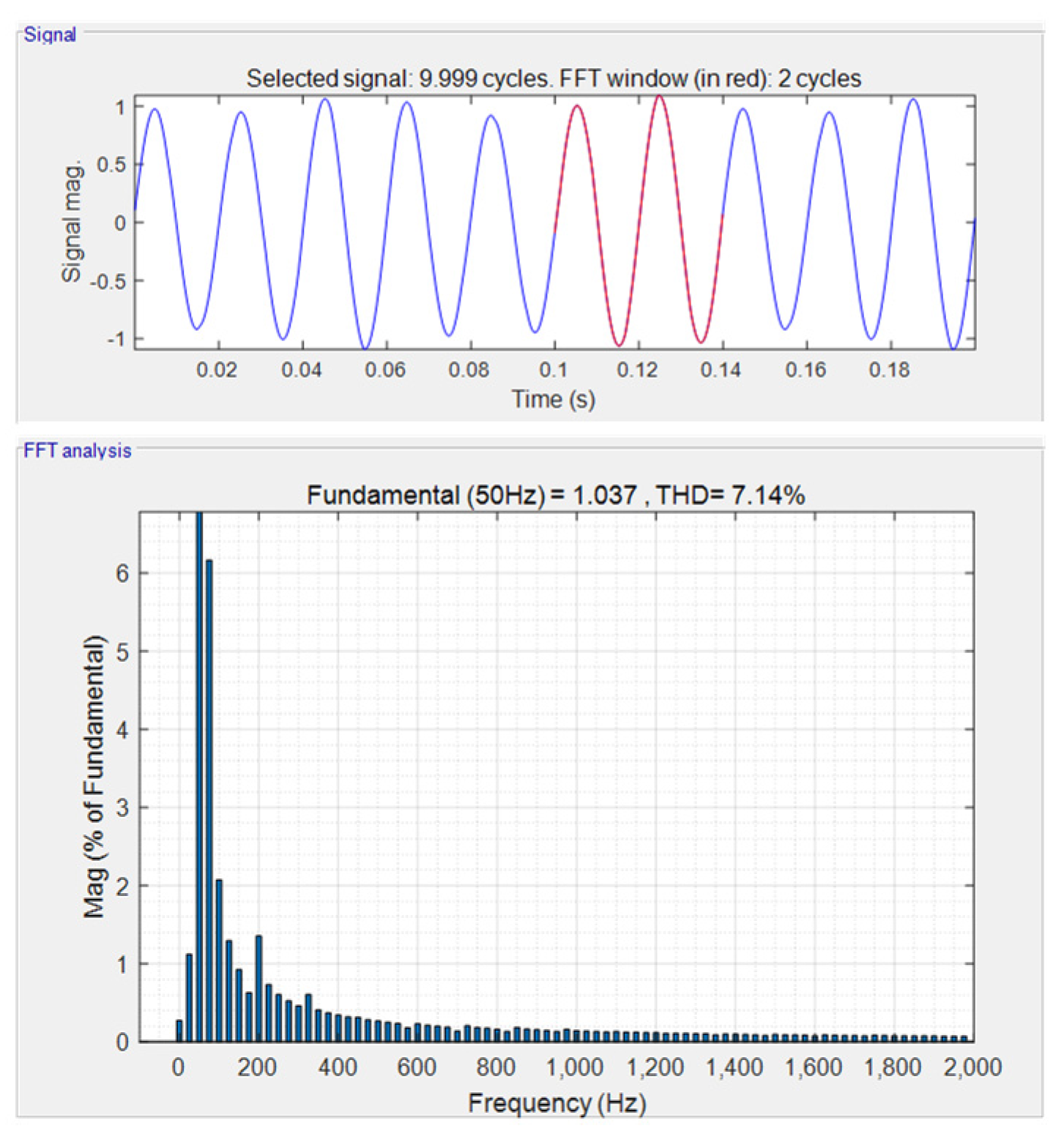
4.1. Simulation Based on Real-Time Sampling
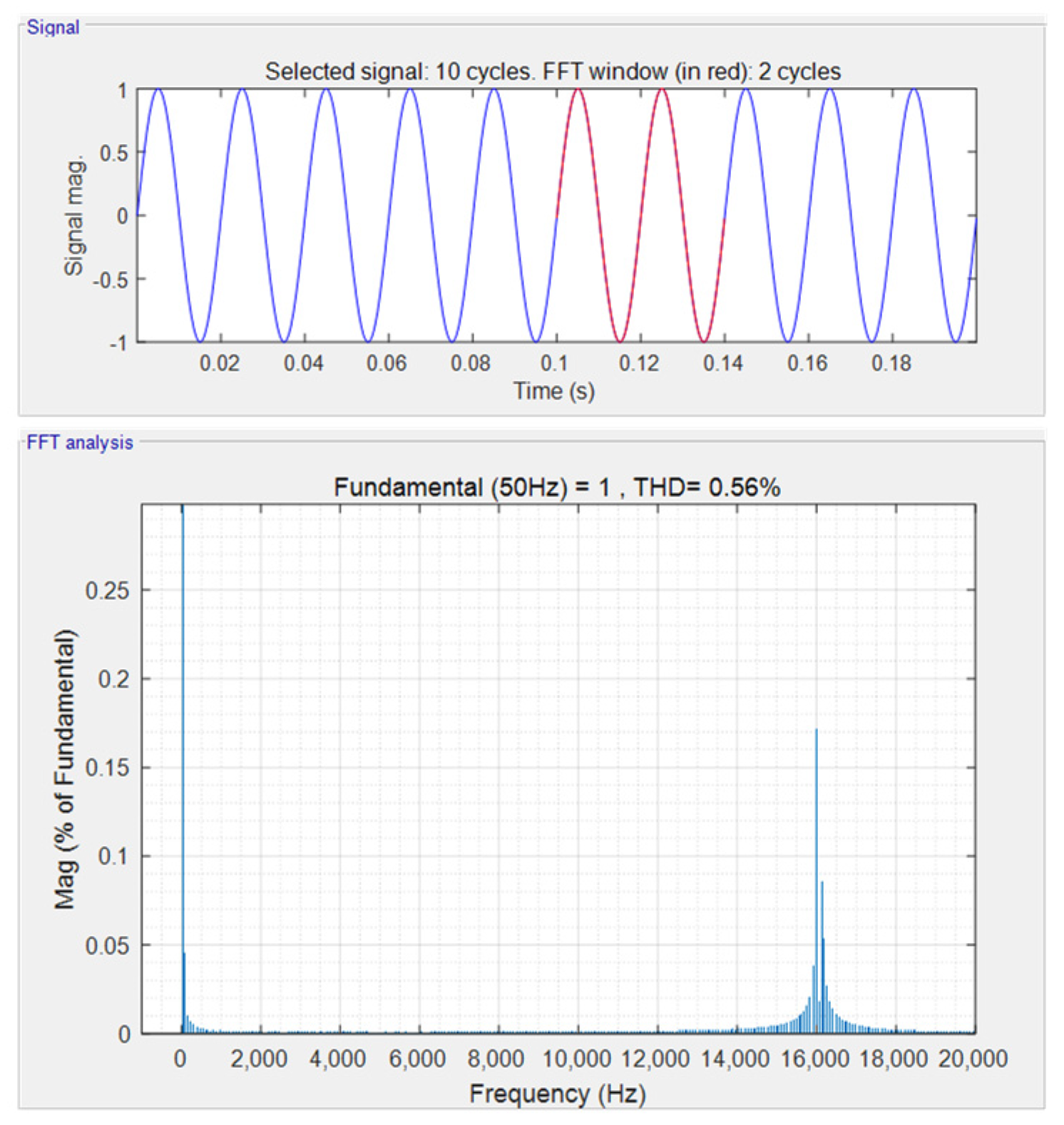
4.2. Simulation Based on Multi-Sampling and Mean Filtering
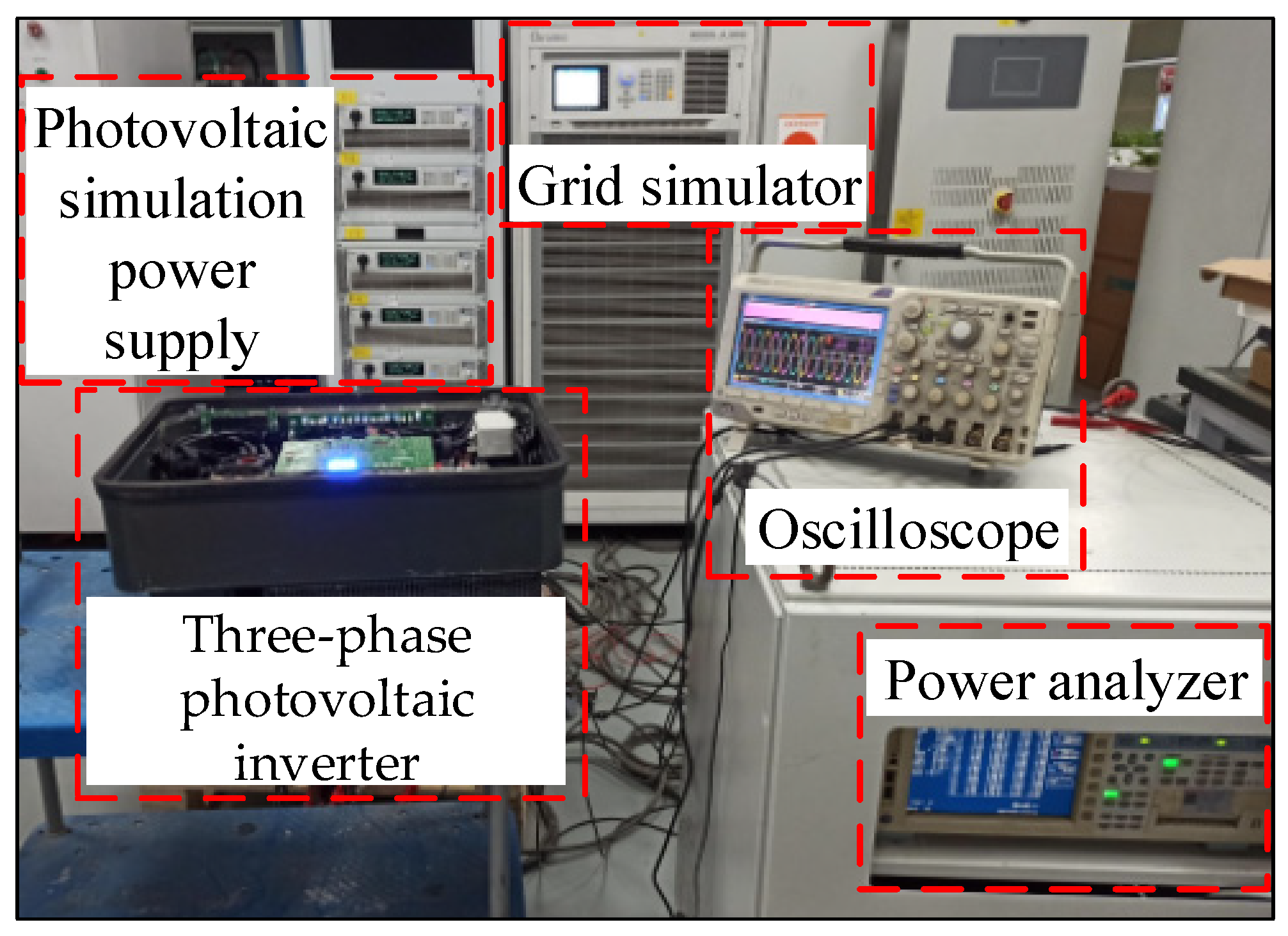
5. Experimental Verification
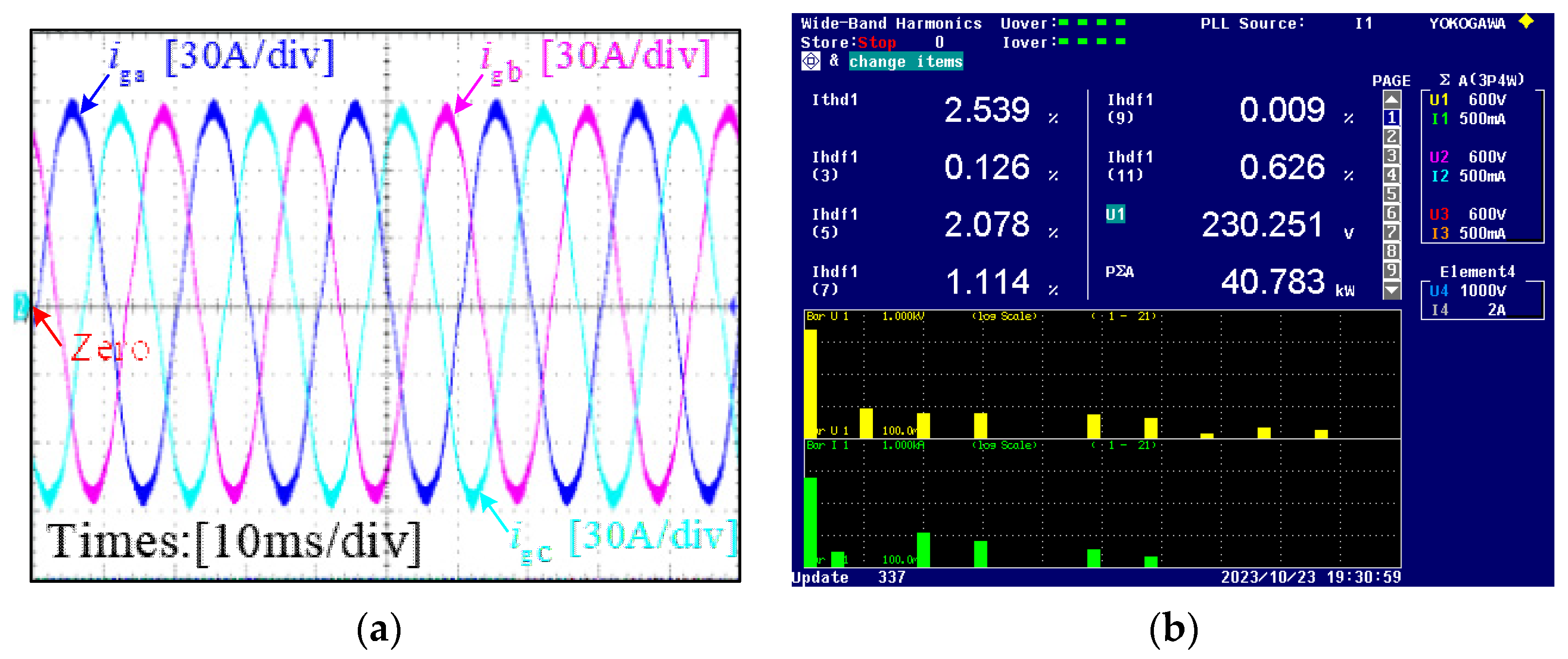
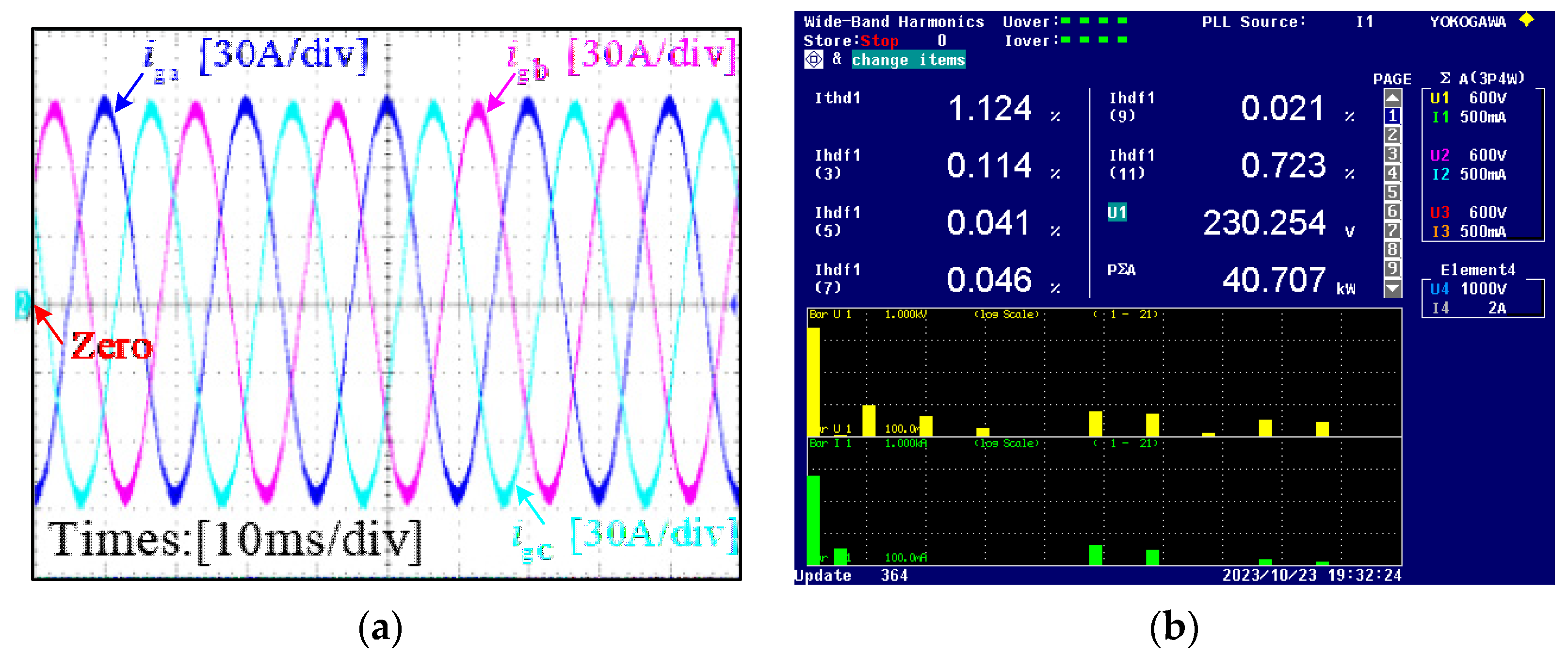
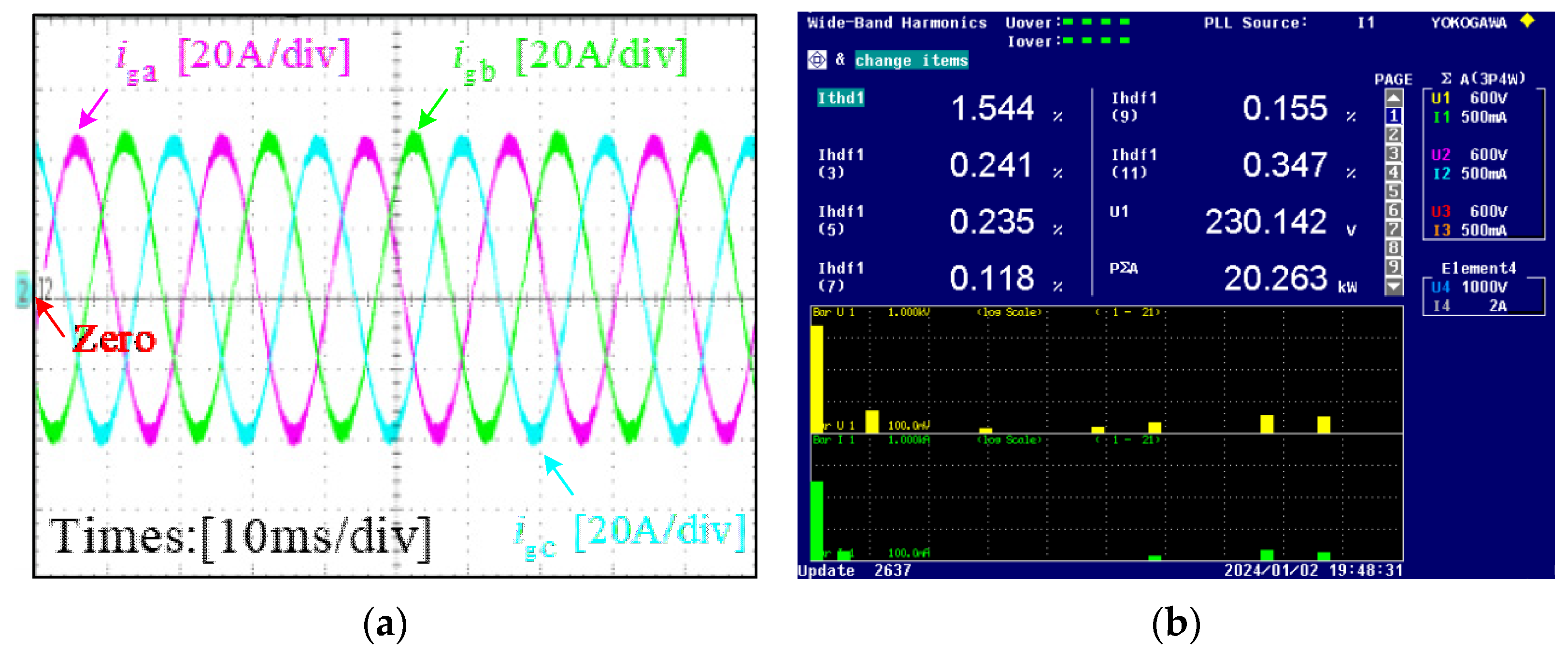
5.1. Experimental Results under Different Operating Conditions
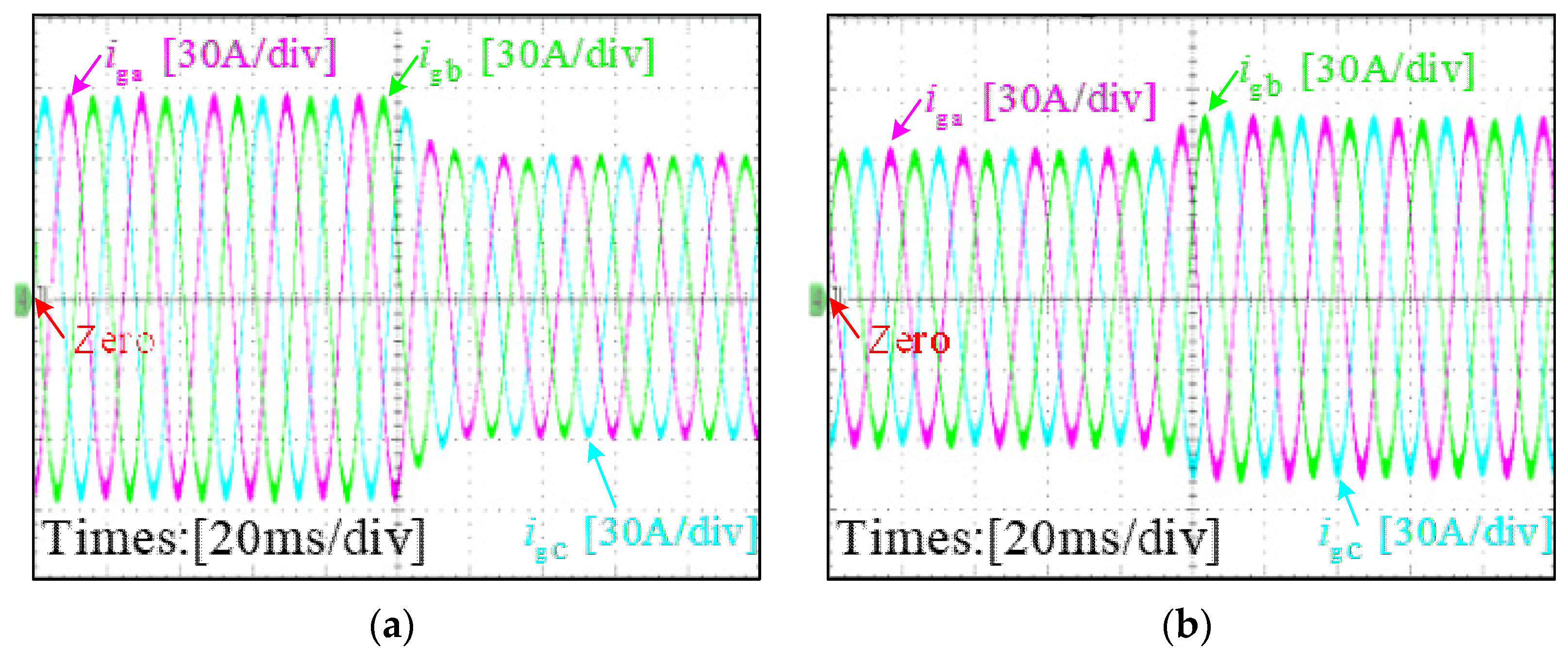
5.2. Experimental Results of Dynamic Characteristics
5.3. Comparison of THD for Different Harmonic Suppression Methods
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- de Jesus, V.M.R.; Cupertino, A.F.; Xavier, L.S.; Pereira, H.A.; Mendes, V.F. Operation Limits of Grid-Tied Photovoltaic Inverters with Harmonic Current Compensation Based on Capability Curves. IEEE Trans. Energy Convers. 2021, 36, 2088–2098. [Google Scholar] [CrossRef]
- Elhassan, G.; Zulkifli, S.A.; Iliya, S.Z.; Bevrani, H.; Kabir, M.; Jackson, R.; Khan, M.H.; Ahmed, M. Deadbeat Current Control in Grid-Connected Inverters: A Comprehensive Discussion. IEEE Access 2022, 10, 3990–4014. [Google Scholar] [CrossRef]
- Zhang, B.; Zhou, K.; Wang, D. Multirate Repetitive Control for PWM DC/AC Converters. IEEE Trans. Ind. Electron. 2014, 61, 2883–2890. [Google Scholar] [CrossRef]
- Choi, W.; Lee, W.; Han, D.; Sarlioglu, B. New Configuration of Multifunctional Grid-Connected Inverter to Improve Both Current-Based and Voltage-Based Power Quality. IEEE Trans. Ind. Appl. 2018, 54, 6374–6382. [Google Scholar] [CrossRef]
- Awal, M.A.; Flora, L.D.; Husain, I. Observer Based Generalized Active Damping for Voltage Source Converters with LCL Filters. IEEE Trans. Power Electron. 2022, 37, 125–136. [Google Scholar] [CrossRef]
- Liu, G.; Mattavelli, P. Hysteresis Droop Controller with One Sample Delay for DC-DC Converters in DC Microgrids. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019. [Google Scholar]
- Liu, Y.; Li, L.; Shan, P.; Yu, H.; Zhang, S.; Huang, M.; Liu, W.; You, X.; Zhang, P.; Sun, Y.; et al. Coordinated Mitigation Control for Wideband Harmonic of the Photovoltaic Grid-Connected Inverter. Appl. Sci. 2023, 13, 7441. [Google Scholar] [CrossRef]
- Li, S.; Zhou, S.; Li, H. Harmonic Suppression Strategy of LCL Grid-Connected PV Inverter Based on Adaptive QPR_PC Control. Electronics 2023, 12, 2282. [Google Scholar] [CrossRef]
- He, G.; Lin, J.; Li, G.; Dong, Y.; Zhang, W. DC Component Suppression of Grid-Connected Z-Source Inverter Based on Disturbance Observer. Energies 2022, 15, 5700. [Google Scholar] [CrossRef]
- Yan, H.; Cai, H. Research on Fuzzy Active Disturbance Rejection Control of LCL Grid-Connected Inverter Based on Passivity-Based Control in Weak Grid. Electronics 2023, 12, 1847. [Google Scholar] [CrossRef]
- He, G.; Chen, G.; Dong, Y.; Li, G.; Zhang, W. Research on LADRC of Grid-Connected Inverter Based on LCCL. Energies 2022, 15, 4686. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, W.; Yang, Y.; Gao, N.; Chen, J.; Koutroulis, E.G.; Chung, H.S.-H.; Liserre, M.; Blaabjerg, F. A Novel Simplified Finite Control Set Repeat Model Predictive Control for Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2023, 70, 11324–11333. [Google Scholar] [CrossRef]
- Chen, X.; Wu, W.; Gao, N.; Chung, H.S.-H.; Liserre, M.; Blaabjerg, F. Finite Control Set Model Predictive Control for LCL-Filtered Grid-Tied Inverter with Minimum Sensors. IEEE Trans. Ind. Electron. 2020, 67, 9980–9990. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, L.; Xie, W.; Xiao, L.; Zhang, Z.; Zhang, Z.; Chen, D. Analysis and Suppression of the Frequency-Aliasing Phenomenon Related to the Sorting-Algorithm-Based Voltage-Balance Strategy in an MMC System. IEEE Trans. Power Electron. 2022, 37, 170–182. [Google Scholar] [CrossRef]
- Zhang, B.; Xu, J.; Xie, S. Analysis and suppression of the aliasing in real-time sampling for grid-connected LCL-filtered inverters. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 304–309. [Google Scholar]
- Zou, C.; Liu, B.; Duan, S.; Li, R. Influence of Delay on System Stability and Delay Optimization of Grid-Connected Inverters with LCL Filter. IEEE Trans. Ind. Inform. 2014, 10, 1775–1784. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Capacitor-Current-Feedback Active Damping with Reduced Computation Delay for Improving Robustness of LCL-Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2014, 29, 3414–3427. [Google Scholar] [CrossRef]
- He, S.; Zhou, D.; Wang, X.; Blaabjerg, F. Switching Harmonics Suppression of Single-loop Multi-sampling Control of Grid-connected Inverter. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 3259–3264. [Google Scholar]
- Li, R.; Liu, B.; Duan, S.; Zou, C.; Jiang, L. Analysis and Suppression of Alias in Digitally Controlled Inverters. IEEE Trans. Ind. Inform. 2014, 10, 655–665. [Google Scholar] [CrossRef]
- Amin, A.M.A.; El-Korfolly, M.I.; Mohammed, S.A. Exploring aliasing distortion effects on regularly-sampled PWM signals. In Proceedings of the 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; pp. 2036–2041. [Google Scholar]
- He, S.; Zhou, D.; Wang, X.; Blaabjerg, F. Overview of Multisampling Techniques in Power Electronics Converters. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 1922–1927. [Google Scholar]
- Ma, J.; Wang, X.; Blaabjerg, F.; Song, W.; Wang, S.; Liu, T. Multisampling Method for Single-Phase Grid-Connected Cascaded H-Bridge Inverters. IEEE Trans. Ind. Electron. 2020, 67, 8322–8334. [Google Scholar] [CrossRef]
- Shi, Y.; Xu, J.; Xie, S. Aliasing Effect in Real-Time Sampling for Grid-Connected LCL-LC-Filtered Inverter with Capacitor Current Feedback. In Proceedings of the 2021 IEEE 12th Energy Conversion Congress & Exposition—Asia (ECCE-Asia), Singapore, 24–27 May 2021; pp. 1366–1371. [Google Scholar]
- Vukosavić, S.N.; Perić, L.S.; Levi, E. AC Current Controller with Error-Free Feedback Acquisition System. IEEE Trans. Energy Convers. 2016, 31, 381–391. [Google Scholar] [CrossRef]
- He, S.; Zhou, D.; Wang, X.; Blaabjerg, F. Aliasing Suppression of Multisampled Current-Controlled LCL-Filtered Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2411–2423. [Google Scholar] [CrossRef]
- Ma, C.; Duan, Q.; Sheng, W.; Li, Y.; Wang, H. High-Frequency Current Ripple Sample Anti-Aliasing Strategy of Digitally Controlled Converter Based on Notch Filter. IEEE Access 2023, 11, 16757–16767. [Google Scholar] [CrossRef]
- Wang, T.; Yao, W.; Li, C.; Yang, H.; Li, W. Aliasing Suppression with Negligible Phase Lag for Multi-Sampled LCL-Type Grid-Tied Inverter. IEEE Trans. Power Electron. 2023, 38, 12520–12535. [Google Scholar] [CrossRef]
- Castelló, J.; Espí, J.M.; García-Gil, R. A New Generalized Robust Predictive Current Control for Grid-Connected Inverters Compensates Anti-Aliasing Filters Delay. IEEE Trans. Ind. Electron. 2016, 63, 4485–4494. [Google Scholar] [CrossRef]
- Wang, T.; Yao, W.; Yang, H.; Li, W.; Ou, Z. Dissipativity Enhancement for Multisampled LCL-Type Inverter Using a Low-Delay Ripple-Removal Method. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 4784–4798. [Google Scholar] [CrossRef]
- Yan, L.C.; Zhu, Z.Q.; Qi, J.; Ren, Y.; Gan, C.; Brockway, S.; Hilton, C. Multiple Synchronous Reference Frame Current Harmonic Regulation of Dual Three Phase PMSM with Enhanced Dynamic Performance and System Stability. IEEE Trans. Ind. Electron. 2022, 69, 8825–8838. [Google Scholar] [CrossRef]
- Petric, I.Z.; Mattavelli, P.; Buso, S. Feedback Noise Propagation in Multisampled DC–DC Power Electronic Converters. IEEE Trans. Power Electron. 2022, 37, 150–161. [Google Scholar] [CrossRef]
- Zmood, D.N.; Holmes, D.G.; Bode, G.H. Frequency-domain analysis of three-phase linear current regulators. IEEE Trans. Ind. Appl. 2001, 37, 601–610. [Google Scholar] [CrossRef]
- Technical Requirements for Photoltaic Grid-Connected Inverter; China Electric Power Press: Beijing, China, 2019.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Harmonic Suppression | Delay Time | Complexity of the Method |
|---|---|---|---|
| Method in [18] | Cannot filter out all SHs | Tsw/4 or Tsw/2 | Low |
| Method in [24] | Can filter out all SHs | Tsw/2 | Low |
| Method in [25] | Can cause high-frequency noise amplification | Tsw/4 | Low |
| Method in [27] | Can filter out all main SHs | ≈0 | High |
| Methods in this paper | Can filter out all SHs | ≈0 | Medium |
| Symbol | Quantity | Value |
|---|---|---|
| LA/LB/LC | Inverter-side filter inductor | 185 uH |
| LgA/LgB/LgC | Grid-side inductor | 12 uH |
| C4/C5/C6 | Filter capacitor | 8 uF |
| Vbus | DC-link voltage | 680 V |
| fc | Carrier frequency | 16 kHz |
| Po | Rated output power | 40 kW |
| Vg | Output voltage | 230 V |
| Methods | 5th Harmonic | 7th Harmonic | THD |
|---|---|---|---|
| Method in [7] | 0.481% | 0.844% | 1.690% |
| Method in [8] | <0.100% | <0.100% | 0.940% |
| Method in [9] | ≈0.250% | ≈0.190% | 2.840% |
| Method in [10] | <0.100% | <0.100% | 0.510% |
| Method in [11] | ≈0.200% | ≈0.160% | 0.730% |
| Method in [18] | <0.100% | <0.100% | 0.090% |
| Method in [25] | ≈0.200% | ≈0.400% | 1.100% |
| Method in [26] | <0.100% | <0.100% | 2.230% |
| Method in [27] | ≈1.700% | ≈0.400% | 2.460% |
| Method in this paper | 0.041% | 0.046% | 1.124% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, H.; Xu, Y.; Wu, W. Aliasing Suppression Method for a Three-Phase Grid-Connected Photovoltaic Inverter Based on Multi-Sampling and Mean Filtering. Energies 2024, 17, 907. https://doi.org/10.3390/en17040907
Geng H, Xu Y, Wu W. Aliasing Suppression Method for a Three-Phase Grid-Connected Photovoltaic Inverter Based on Multi-Sampling and Mean Filtering. Energies. 2024; 17(4):907. https://doi.org/10.3390/en17040907
Chicago/Turabian StyleGeng, Houlai, Yunfeng Xu, and Weimin Wu. 2024. "Aliasing Suppression Method for a Three-Phase Grid-Connected Photovoltaic Inverter Based on Multi-Sampling and Mean Filtering" Energies 17, no. 4: 907. https://doi.org/10.3390/en17040907
APA StyleGeng, H., Xu, Y., & Wu, W. (2024). Aliasing Suppression Method for a Three-Phase Grid-Connected Photovoltaic Inverter Based on Multi-Sampling and Mean Filtering. Energies, 17(4), 907. https://doi.org/10.3390/en17040907