
A Novel Method for Removal of Dual Decaying DC Offsets to Enhance Discrete Fourier Transform-Based Phasor Estimation



Abstract
1. Introduction
- Only one DDCO is indicated.
- Sensitive to noise and harmonics.
- Use of approximation techniques leads to errors in estimation.
- Sensitive to variation in the primary DDCO.
- A specific sampling rate is required.
- A hardware upgrade is required to implement the algorithm.
- More samples (N + 2 or N + 3) are required to deal with dual DDCOs.
- The exact value of the dual DDCO components is estimated without any approximation.
- This algorithm does not require a specific sampling rate to execute the command.
- The phasor of the fundamental frequency component is estimated accurately within a convergence time of 16.92 ms.
- It yields an error of less than 1.08% after N samples from fault initiation.
- It does not increase sensitivity to the off-nominal frequency while estimating phasor.
- It is practical for real-time and backup protection due to its light burden and execution time (could be implemented within existing devices).
- It can be used only for one cycle, while some methods can be used for both half cycles and one cycle.
- The method requires N + 1 samples.
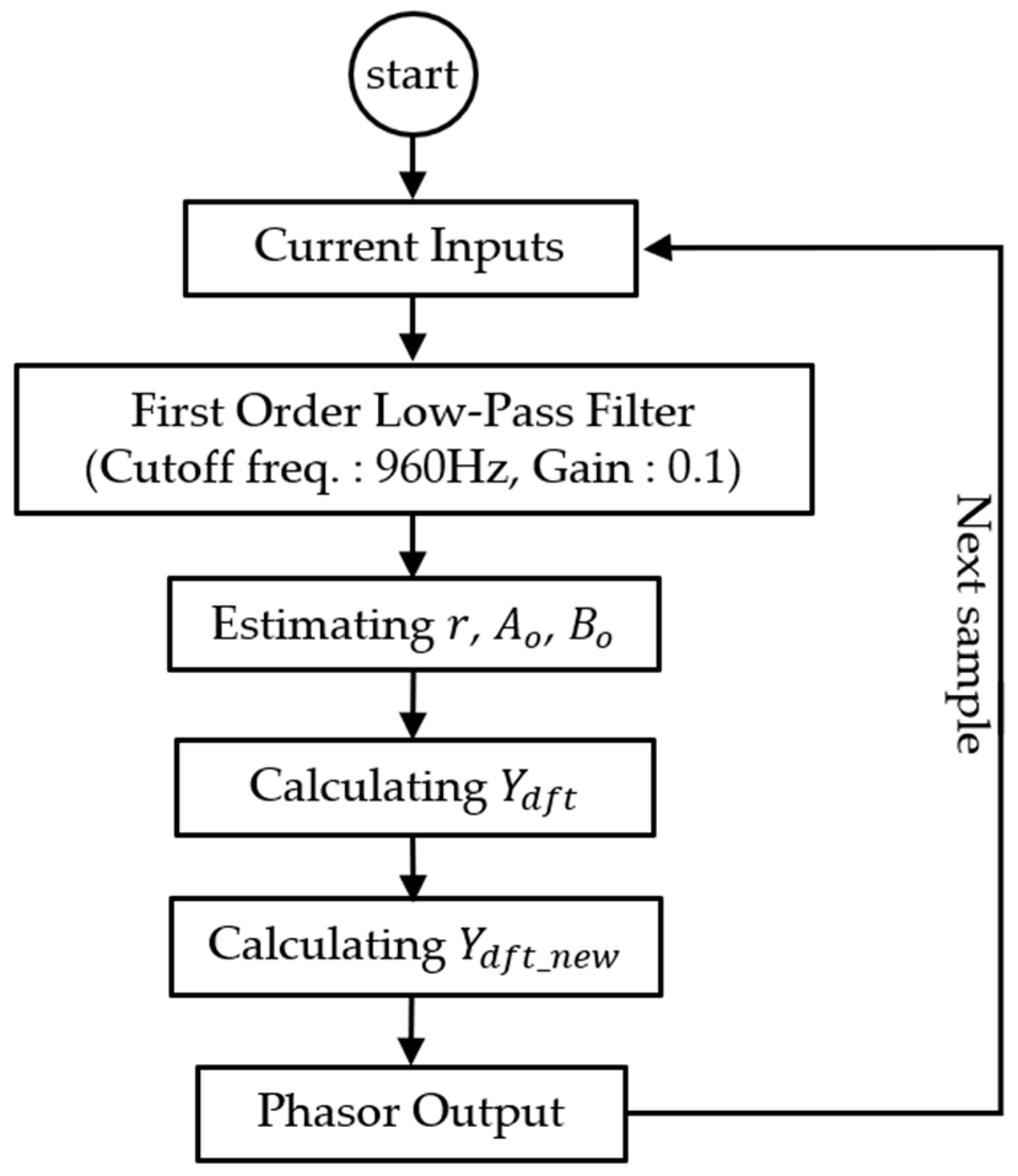
2. The Enhanced DFT-Based Phasor Estimation
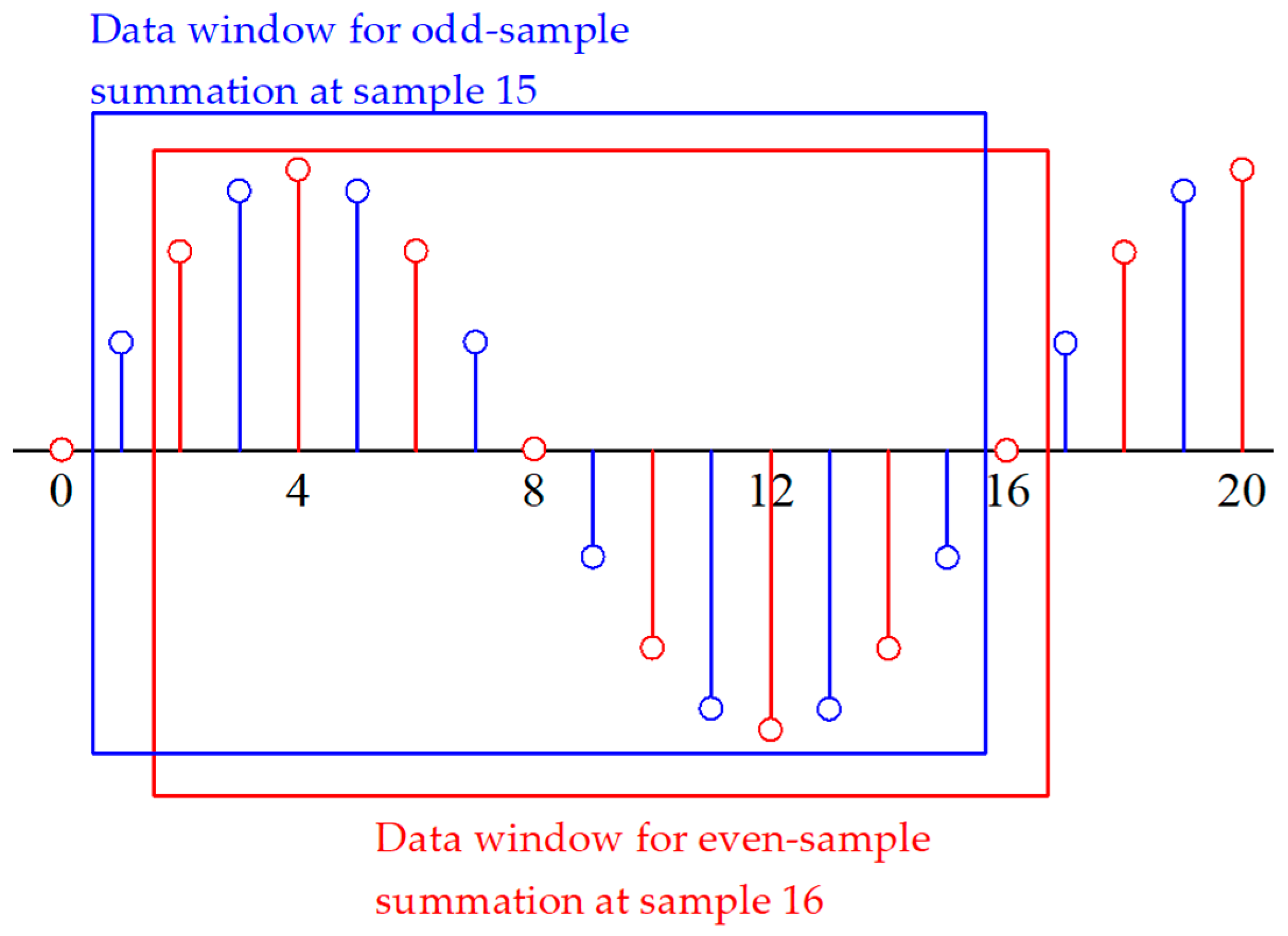
2.1. Dual Decaying DC Offset Estimation
2.2. Enhanced DFT-Based Phasor Estimation
3. Performance Evaluation
3.1. Mathematically Generated Signal
3.1.1. Normal Conditions
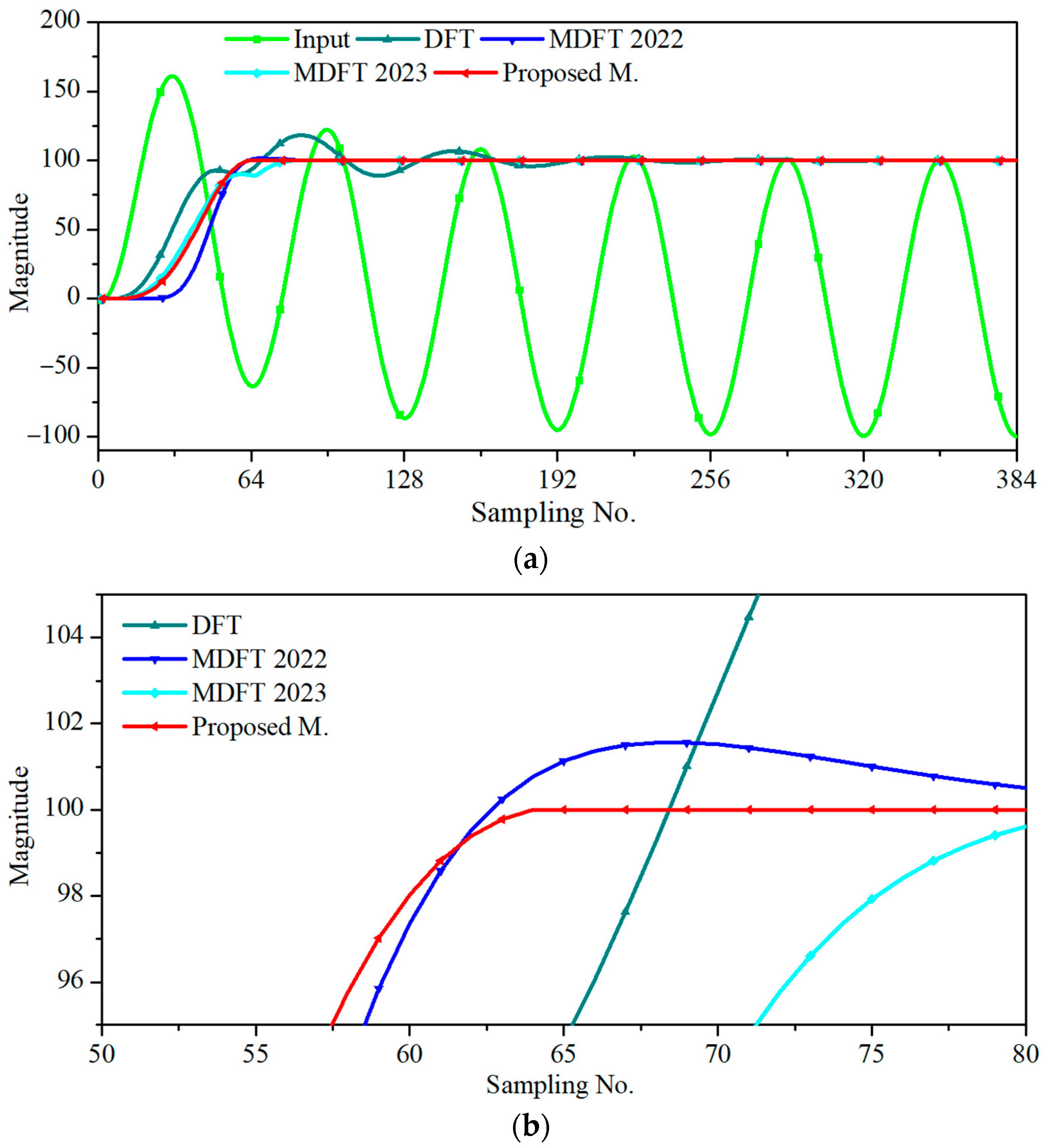
3.1.2. Input Signal Containing a Primary DDCO with a Time Constant of Half Cycle
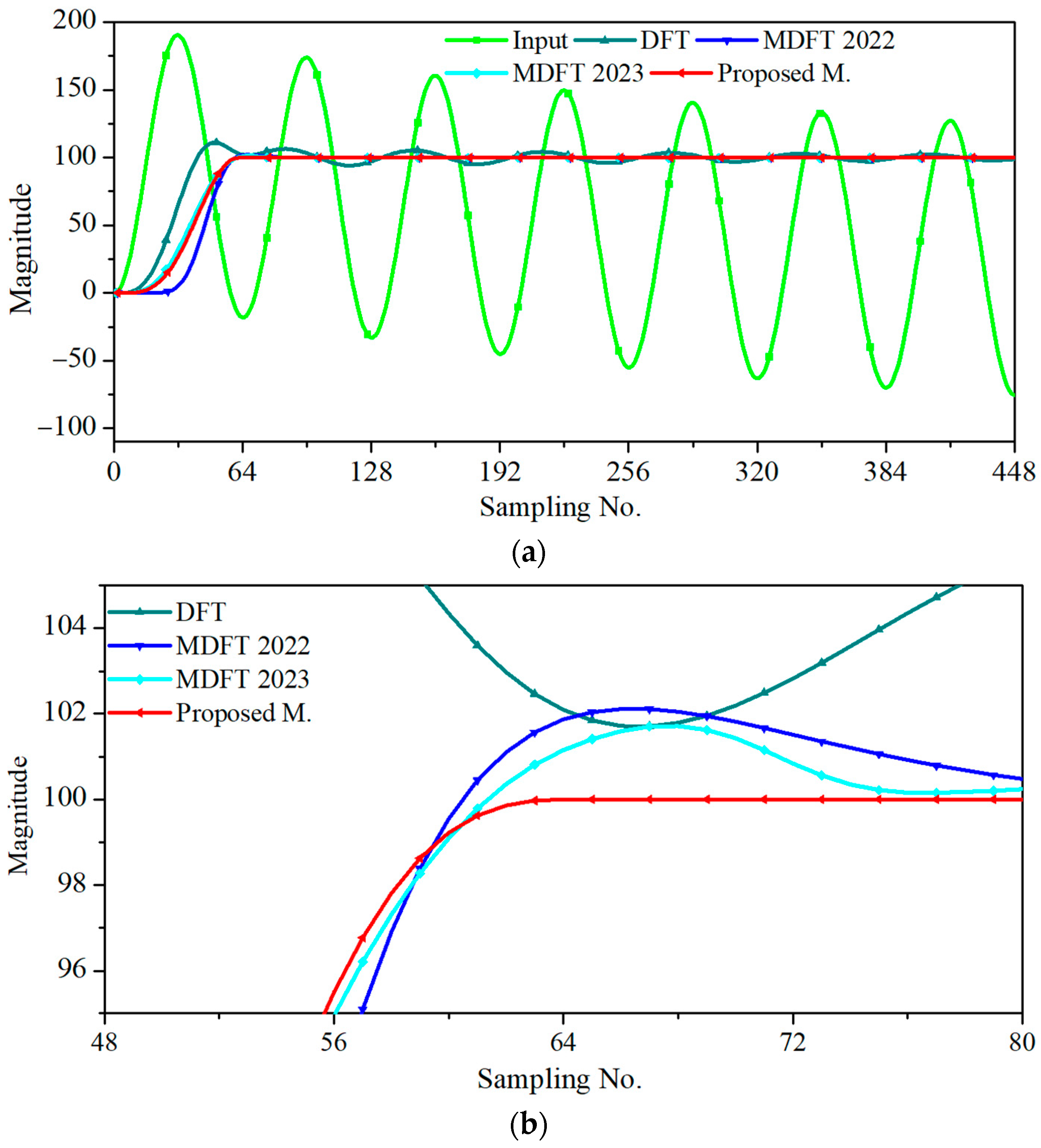
3.1.3. Input Signal Containing a Primary DDCO with a Time Constant of 5 Cycles
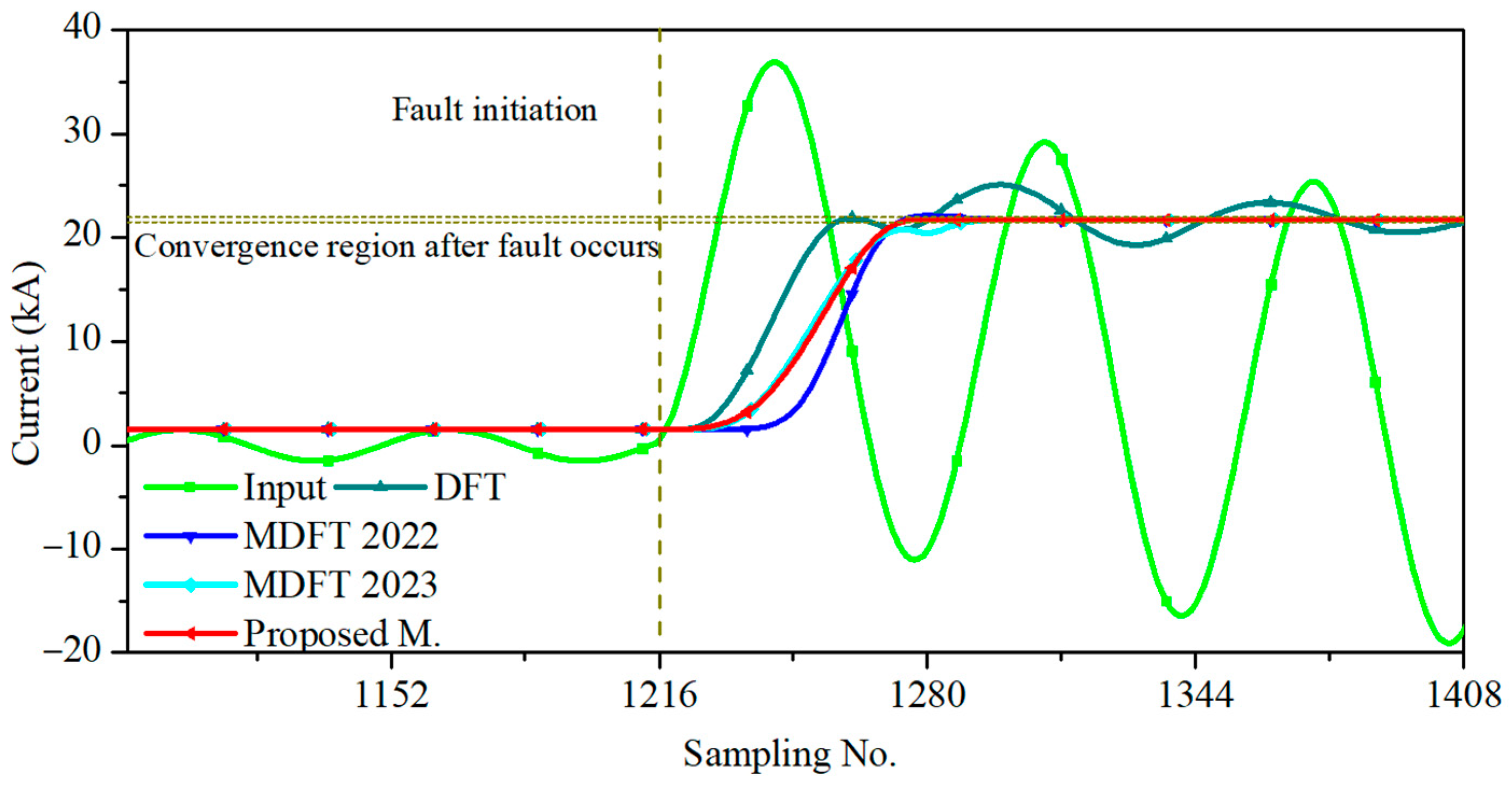
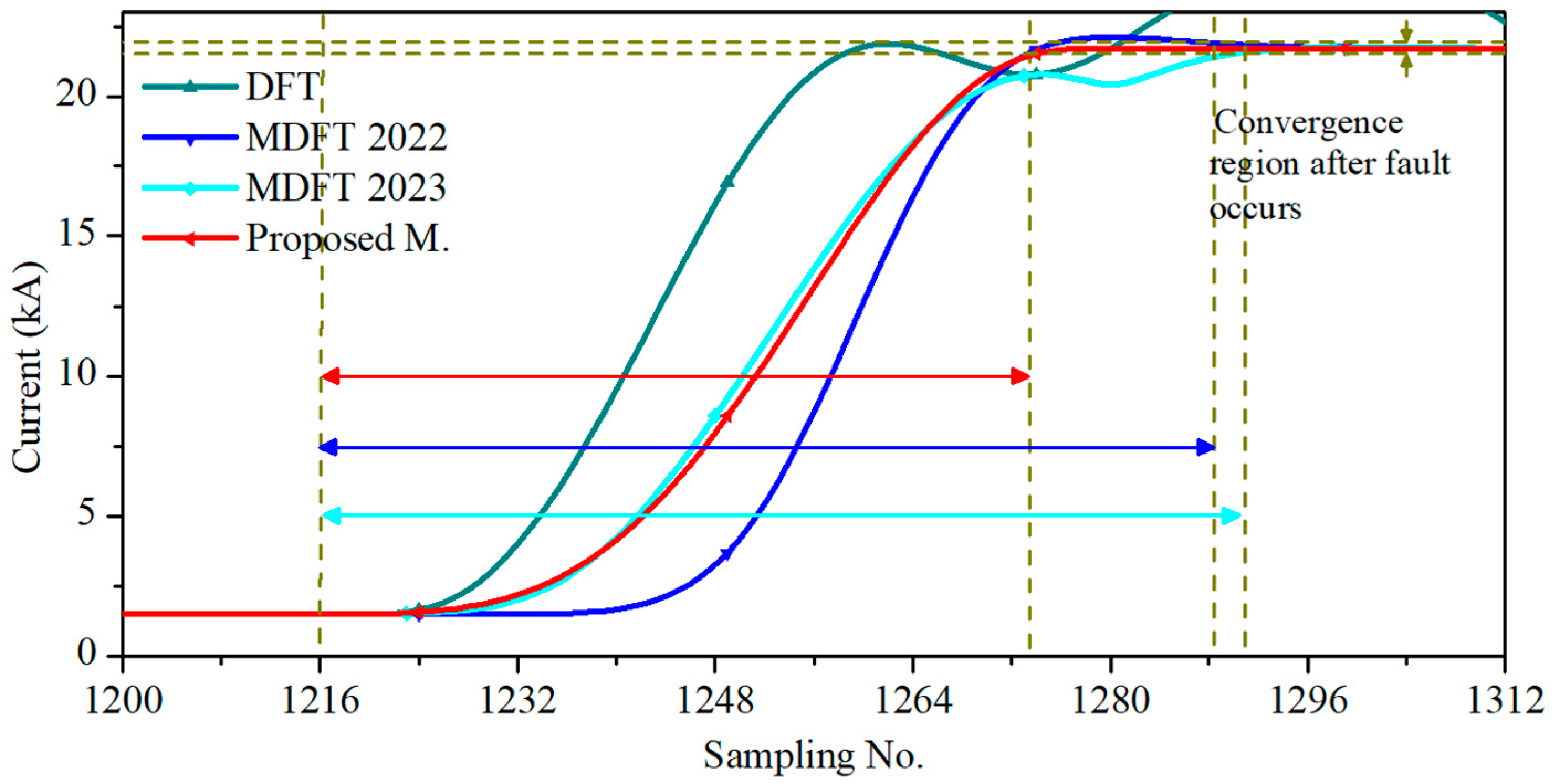
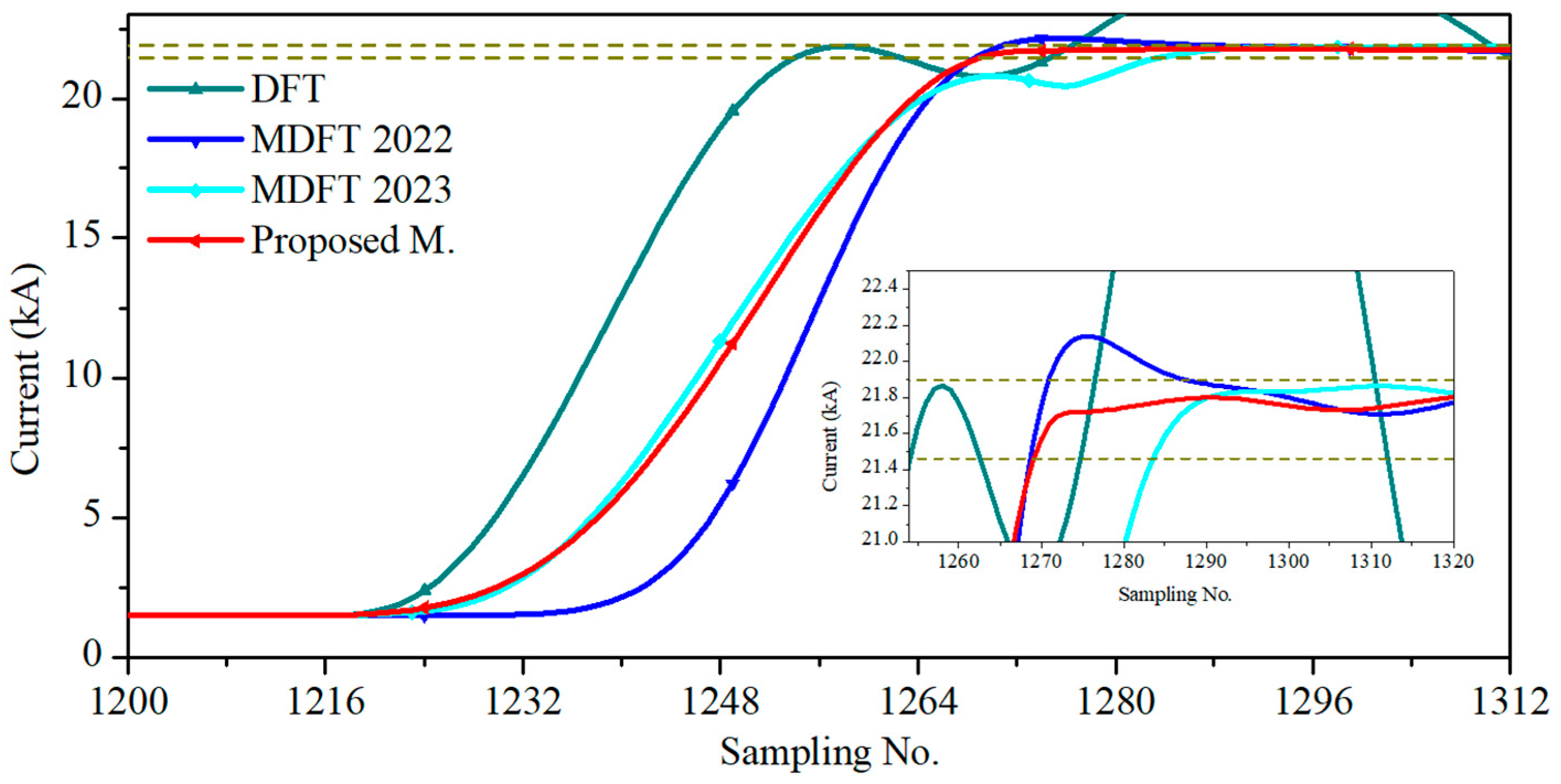
- Conventional DFT clearly presented the worst performance when dual DDCOs were present. In certain cases, the maximum error exceeded 20% and the convergence time to an error accuracy of ±5% reached 3 cycles;
- MDFT 2022 was negatively affected when the primary DDCO had a large time constant, but worked well under normal conditions or when the primary DDCO exhibited a small time constant;
- MDFT 2023 performed very poorly when the primary DDCO exhibited a small time constant;
- The new proposed DFT-based phasor estimation method converged within N samples without any error because approximation was not needed;
- If an accuracy of ± 1% is required, the proposed method is optimal in all scenarios.
3.2. PSCAD/EMTDC-Generated Signal
3.3. Off-Nominal Frequency Operation
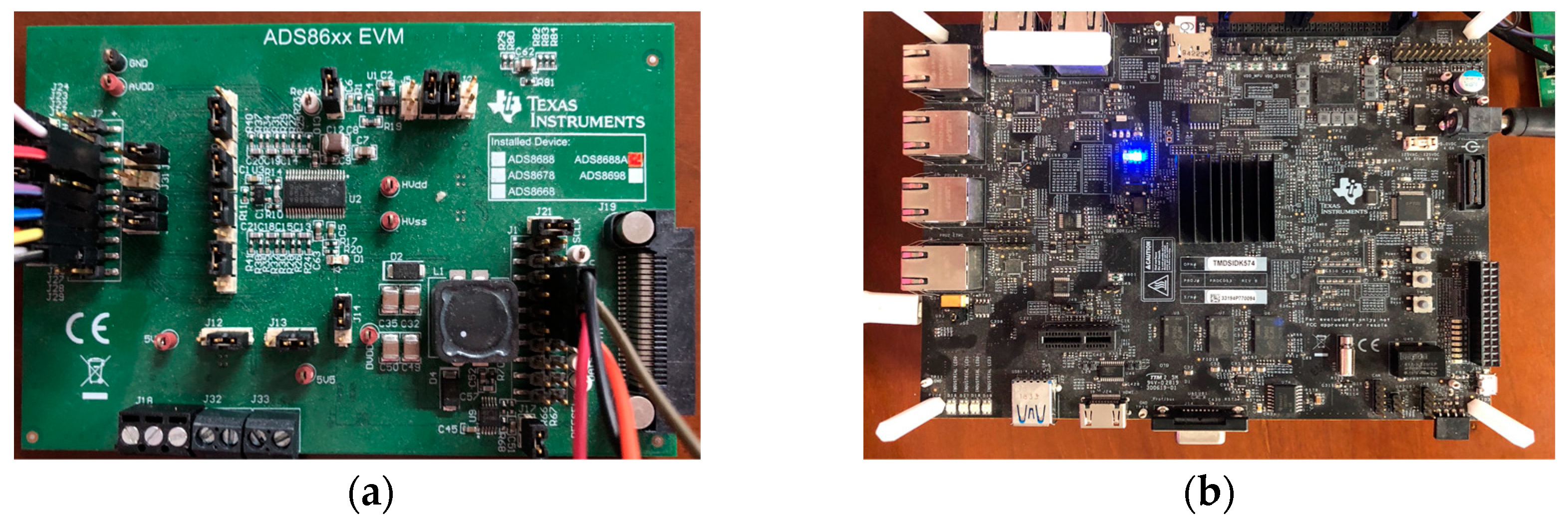
4. Hardware Prototype and Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, S.L.; Gu, J.C. Removal of decaying DC in current and voltage signals using a modified Fourier filter algorithm. IEEE Trans. Power Deliv. 2001, 16, 372–379. [Google Scholar]
- Gu, J.C.; Yu, S.L. Removal of DC offset in current and voltage signals using a novel Fourier filter algorithm. IEEE Trans. Power Deliv. 2000, 15, 73–79. [Google Scholar]
- Mohammadi, S.; Mahmoudi, A.; Kahourzade, S.; Yazdani, A.; Shafiullah, G. Decaying DC Offset Current Mitigation in Phasor Estimation Applications: A Review. Energies 2022, 15, 5260. [Google Scholar] [CrossRef]
- Girgis, A.A. A new kalman filtering based digital distance relay. IEEE Trans. Power Appar. Syst. 1982, 101, 3471–3480. [Google Scholar] [CrossRef]
- Benmouyal, G. Frequency-doman characterization of kalman filters as applied to power system protection. IEEE Trans. Power Del. 1992, 7, 1129–1138. [Google Scholar] [CrossRef]
- Benmouyal, G. Removal of DC-offset in current waveforms using digital mimic filtering. IEEE Trans. Power Deliv. 1995, 10, 621–630. [Google Scholar] [CrossRef]
- Sachdev, M.; Baribeau, M. A new algorithm for digital impedance relays. IEEE Trans. Power Appar. Syst. 1979, 98, 2232–2240. [Google Scholar] [CrossRef]
- Isaksson, A. Digital protective relaying through recursive least-squares identification. Proc. Inst. Elect. Eng. Gen. Transm. Distrib. 1988, 135, 441–449. [Google Scholar] [CrossRef]
- Sachdev, M.; Nagpal, M. A recursive least error squares algorithm for power system relaying and measurement applications. IEEE Trans. Power Deliv. 1991, 6, 1008–1015. [Google Scholar] [CrossRef]
- Jafarian, P.; Sanaye-Pasand, M. An adaptive phasor estimation technique based on LES method using forgetting factor. In Proceedings of the 2009 IEEE Power and Energy Society General Meeting (PES ′09), Calgary, AB, Canada, 26–30 July 2009; pp. 1–8. [Google Scholar]
- Jafarian, P.; Sanaye-Pasand, M. Weighted least error squares based variable window phasor estimator for distance relaying application. IET Gener. Transm. Distrib. 2011, 5, 298–306. [Google Scholar] [CrossRef]
- Hwang, J.K. Least error squared phasor estimation with identification of a decaying DC component. IET Gener. Transm. Distrib. 2018, 12, 1486–1492. [Google Scholar] [CrossRef]
- Min, K.W.; Santoso, S. DC offset removal algorithm for improving location estimates of momentary faults. IEEE Trans. Smart Grid 2018, 9, 5503–5511. [Google Scholar] [CrossRef]
- Achlerkar, P.D.; Panigrahi, B.K. Assessment of DC offset in fault current signal for accurate phasor estimation considering current transformer response. IET Sci. Meas. Technol. 2019, 13, 403–408. [Google Scholar] [CrossRef]
- da Silva, C.D.L.; Cardoso, G.; de Morais, A.P.; Marchesan, G.; Guarda, F.G.K. A continually online trained impedance estimation algorithm for transmission line distance protection tolerant to system frequency deviation. Electr. Power Syst. Res. 2017, 147, 73–80. [Google Scholar] [CrossRef]
- Kim, S.-B.; Sok, V.; Kang, S.-H.; Lee, N.-H.; Nam, S.-R. A Study on Deep Neural Network-Based DC Offset Removal for Phase Estimation in Power Systems. Energies 2019, 12, 1619. [Google Scholar] [CrossRef]
- Sok, V.; Lee, S.-W.; Kang, S.-H.; Nam, S.-R. Deep Neural Network-Based Removal of a Decaying DC Offset in Less Than One Cycle for Digital Relaying. Energies 2022, 15, 2644. [Google Scholar] [CrossRef]
- Nam, S.-R.; Kang, S.-H.; Park, J.-K. An analytic method for measuring accurate fundamental frequency components. IEEE Trans. Power Deliv. 2002, 17, 405–411. [Google Scholar] [CrossRef]
- Nam, S.-R.; Kang, S.-H.; Sohn, J.-M.; Park, J.-K. Modified notch filter-based instantaneous phasor estimation for high-speed distance protection. Electr. Eng. 2007, 89, 311–317. [Google Scholar] [CrossRef]
- Rao, J.T.; Bhalja, B.R.; Andreev, M.V.; Malik, O.P. Synchrophasor Assisted Power Swing Detection Scheme for Wind Integrated Transmission Network. IEEE Trans. Power Deliv. 2022, 37, 1952–1962. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, V.; Tyagi, B. Islanding detection for reconfigurable microgrid with RES. IET Gener. Transm. Distrib. 2021, 15, 1187–1202. [Google Scholar] [CrossRef]
- Rao, J.T.; Bhalja, B. A New Phase Angle of Superimposed Positive Sequence Current-Based Discrimination Scheme for Prevention of Maloperation of Distance Relay During Severe Stressed Conditions. IEEE Syst. J. 2020, 14, 3705–3716. [Google Scholar] [CrossRef]
- Mohammadi, S.; Rezaei, N.; Mahmoudi, A. A novel analytical method for DC offset mitigation enhancing DFT phasor estimation. Electr. Power Syst. Res. 2022, 209, 108036. [Google Scholar] [CrossRef]
- Yu, H.; Jin, Z.; Zhang, H.; Terzija, V. A Phasor Estimation Algorithm Robust to Decaying DC Component. IEEE Trans. Power Deliv. 2022, 37, 860–870. [Google Scholar] [CrossRef]
- Afrandideh, S.; Haghjoo, F. A DFT-based phasor estimation method robust to primary and secondary decaying DC components. Electr. Power Syst. Res. 2022, 208, 107907. [Google Scholar] [CrossRef]
- Afrandideh, S. A Modified DFT-Based Phasor Estimation Algorithm Using an FIR Notch Filter. IEEE Trans. Power Deliv. 2023, 38, 1308–1315. [Google Scholar] [CrossRef]
- Yong Guo, M. Kezunovic and Deshu Chen. Simplified algorithms for removal of the effect of exponentially decaying DC-offset on the Fourier algorithm. IEEE Trans. Power Deliv. 2003, 18, 711–717. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Parameter | Value | Unit |
|---|---|---|---|
| Positive and Negative | 0.0419 | Ω/km | |
| 0.8921 | mH/km | ||
| 0.0128 | µF/km | ||
| Zero | 0.0293 | Ω/km | |
| 2.6657 | mH/km | ||
| 0.0042 | µF/km |
| Fault Distance | Fault Inception Angle | MDFT 2022 | MDFT 2023 | Proposed Method |
|---|---|---|---|---|
| 5 (km) | 0° | 1.77% | 6.00% | 0.17% |
| 30° | 0.14% | 0.48% | 0.14% | |
| 60° | 3.55% | 3.70% | 0.55% | |
| 90° | 5.79% | 1.08% | 1.08% | |
| 10 (km) | 0° | 1.79% | 7.22% | 0.19% |
| 30° | 0.25% | 0.65% | 0.15% | |
| 60° | 3.43% | 3.58% | 0.24% | |
| 90° | 5.49% | 1.28% | 0.87% | |
| 13 (km) | 0° | 1.81% | 7.32% | 0.22% |
| 30° | 0.29% | 0.90% | 0.17% | |
| 60° | 3.37% | 3.48% | 0.16% | |
| 90° | 4.81% | 1.25% | 0.67% |
| Fault Distance | Fault Inception Angle | MDFT 2022 | MDFT 2023 | Proposed Method |
|---|---|---|---|---|
| 5 (km) | 0° | 18.75 ms | 19.27 ms | 15.10 ms |
| 30° | 14.06 ms | 16.66 ms | 15.88 ms | |
| 60° | 18.75 ms | 18.22 ms | 16.40 ms | |
| 90° | 18.75 ms | 16.92 ms | 16.92 ms | |
| 10 (km) | 0° | 18.75 ms | 19.53 ms | 15.36 ms |
| 30° | 14.06 ms | 16.66 ms | 15.88 ms | |
| 60° | 18.75 ms | 18.22 ms | 16.40 ms | |
| 90° | 18.75 ms | 17.44 ms | 16.40 ms | |
| 13 (km) | 0° | 18.75 ms | 19.53 ms | 15.36 ms |
| 30° | 14.06 ms | 16.66 ms | 15.88 ms | |
| 60° | 18.75 ms | 18.22 ms | 16.40 ms | |
| 90° | 18.48 ms | 16.92 ms | 16.40 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sok, V.; Kim, S.-H.; Lak, P.Y.; Nam, S.-R. A Novel Method for Removal of Dual Decaying DC Offsets to Enhance Discrete Fourier Transform-Based Phasor Estimation. Energies 2024, 17, 905. https://doi.org/10.3390/en17040905
Sok V, Kim S-H, Lak PY, Nam S-R. A Novel Method for Removal of Dual Decaying DC Offsets to Enhance Discrete Fourier Transform-Based Phasor Estimation. Energies. 2024; 17(4):905. https://doi.org/10.3390/en17040905
Chicago/Turabian StyleSok, Vattanak, Su-Hwan Kim, Peng Y. Lak, and Soon-Ryul Nam. 2024. "A Novel Method for Removal of Dual Decaying DC Offsets to Enhance Discrete Fourier Transform-Based Phasor Estimation" Energies 17, no. 4: 905. https://doi.org/10.3390/en17040905
APA StyleSok, V., Kim, S.-H., Lak, P. Y., & Nam, S.-R. (2024). A Novel Method for Removal of Dual Decaying DC Offsets to Enhance Discrete Fourier Transform-Based Phasor Estimation. Energies, 17(4), 905. https://doi.org/10.3390/en17040905