
A Mini Review of the Impacts of Machine Learning on Mobility Electrifications

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
1.1. Why Machine Learning in Transportation Mobility
1.2. Main Contributions of the Work
1.3. Paper Organization
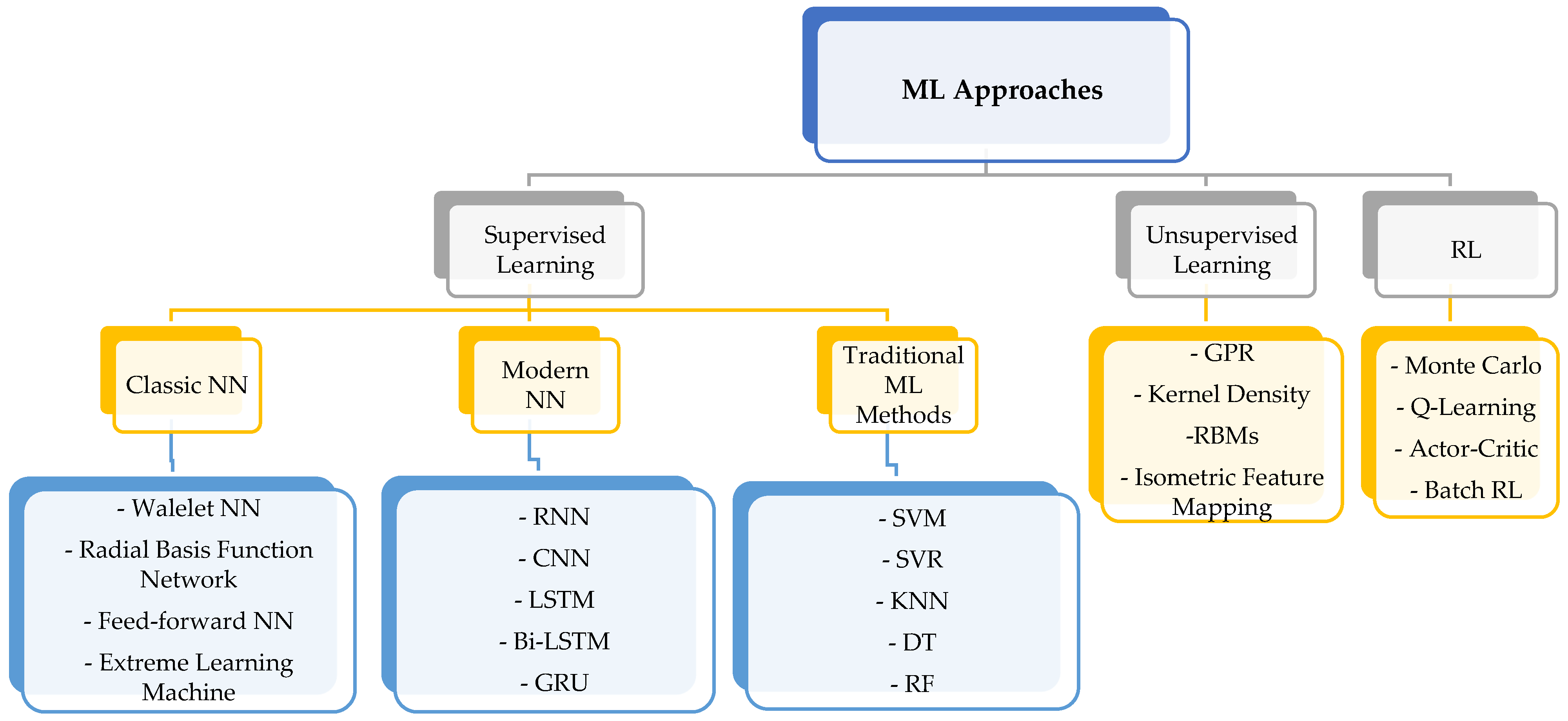
2. ML/DL Models
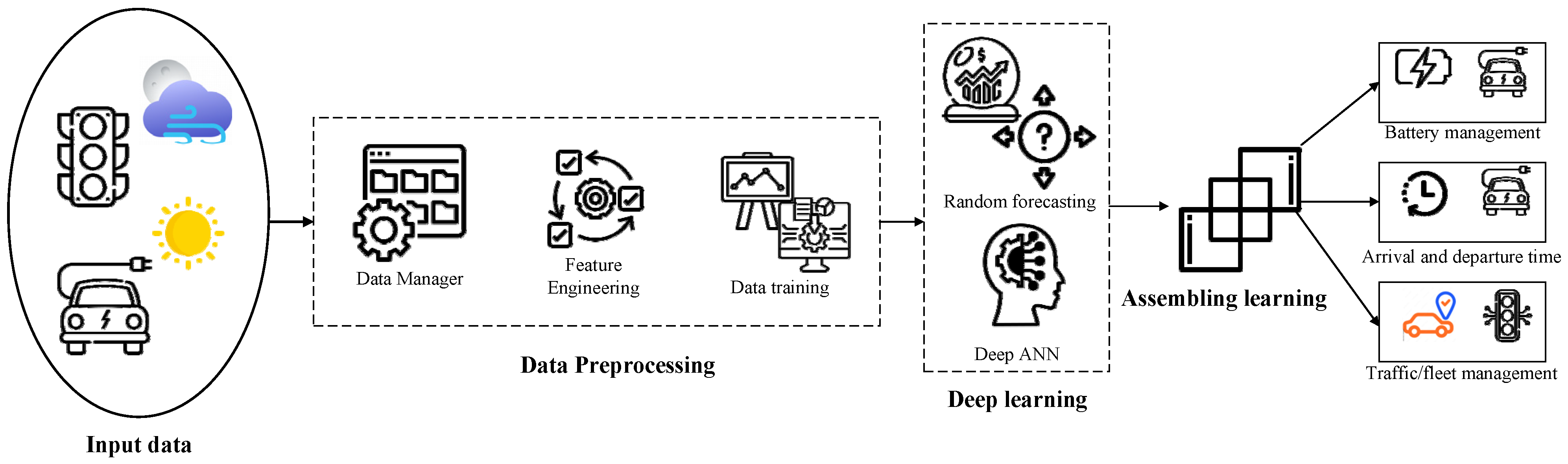
- Data collection: gather data from various resources.
- Data preprocessing: Clean the collected data and preprocess them to train the DL model. This may involve removing outliers, normalizing the data, and splitting them into training, validation, and test sets.
- Model architecture: Design a DL model architecture suitable for predicting based on the collected data. This could be an RNN, CNN, DAE, DBN, or LSTM, depending on the nature of the data and the desired prediction accuracy (refer to Table 1).
- Training: Train the model using the preprocessed data. During training, the model learns to map the input data. This involves adjusting the parameters of the model (e.g., weights and biases) using optimization algorithms.
- Evaluation: evaluate the trained model on the validation set to assess its performance and fine-tune hyperparameters if necessary.
- Testing: Finally, the trained model will be tested on the unseen test data to evaluate its generalization performance. This step ensures that the model can accurately predict.
- Deployment: Once the model has been trained and tested successfully, deploy it for real-time prediction. The model continuously analyzes data and provides accurate predictions.
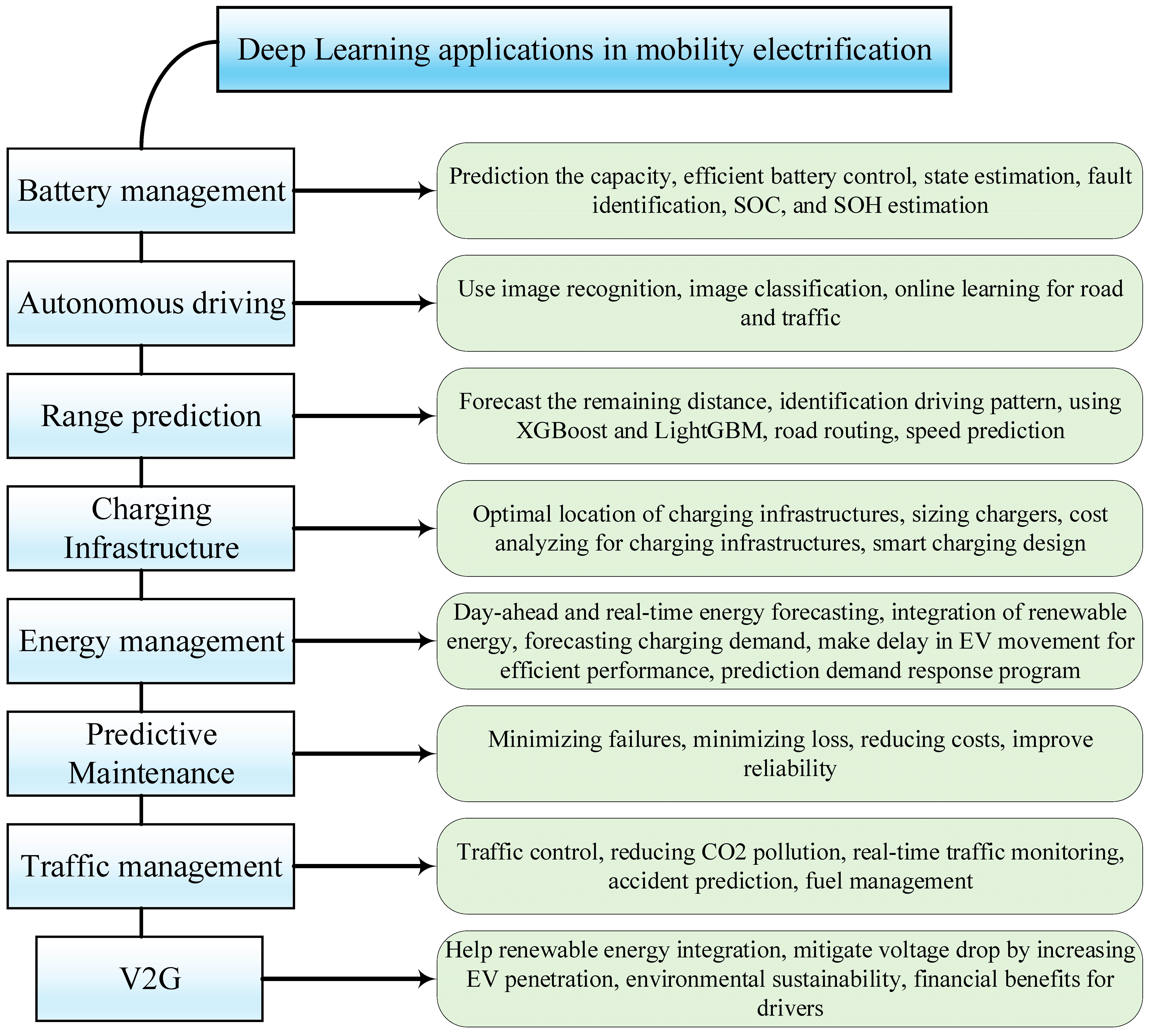
3. Mobility Electrification with ML/DL
3.1. Battery Management
3.2. Range Prediction
3.3. Charging Infrastructure Optimization
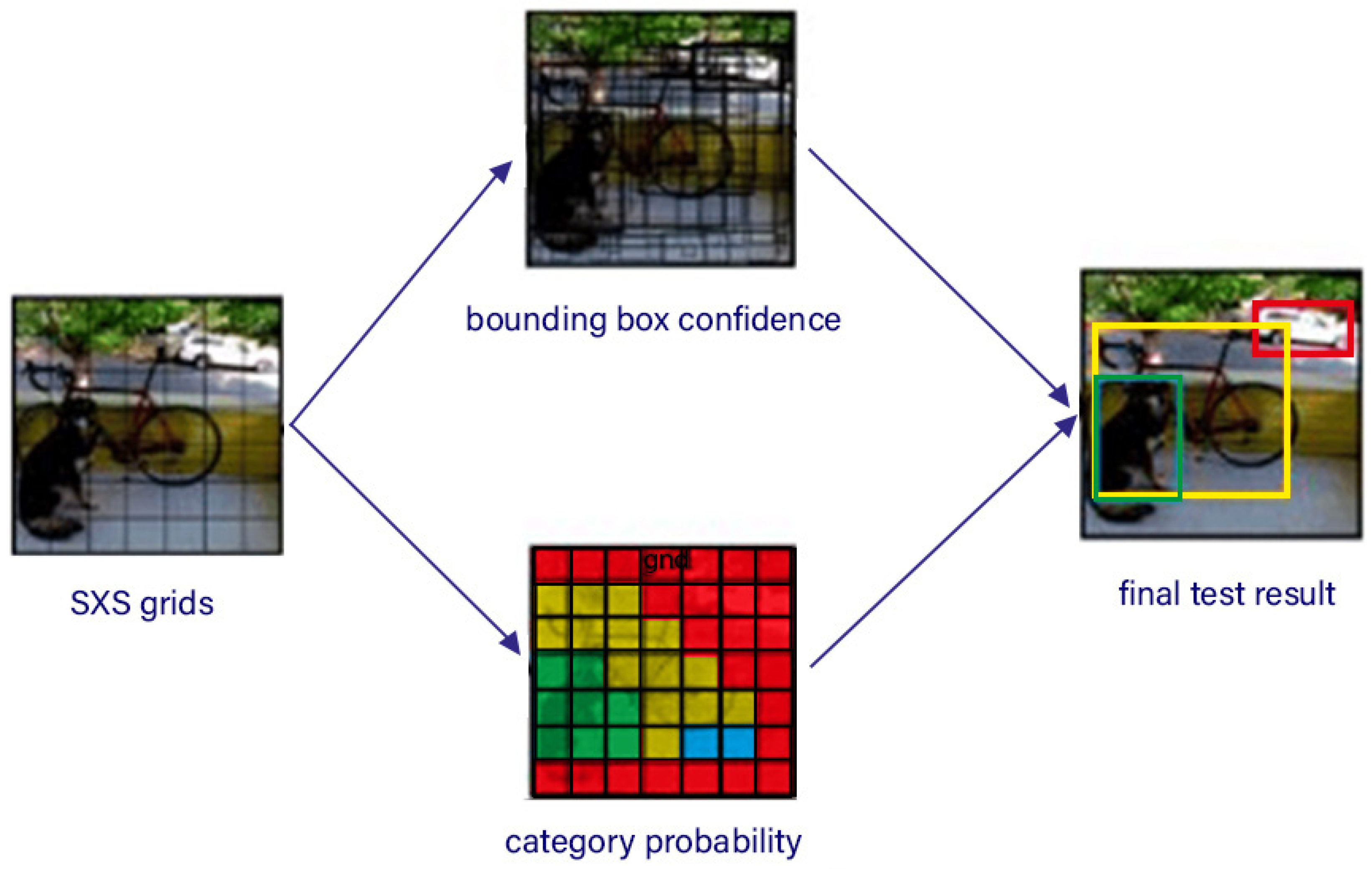
3.4. Autonomous Driving (AD)
3.5. Energy Management
3.6. Predictive Maintenance
3.7. Traffic Management
3.8. V2G
3.9. Fleet Management
3.10. Relationship Between the Various Mentioned Aspects
4. Discussion
4.1. Challenges
4.1.1. General Challenges
4.1.2. Detailed Challenges
4.2. Future Trends
- V2G as a solution for renewable energy integration: Focusing on V2G technology as the most sustainable solution for integrating high-capacity EVs and renewable resources until 2030 is the main trend in the field of e-mobility. In other words, the integration of the high capacity of clean energy to pursue carbon-free policies by 2030 requires expensive network equipment such as high-voltage transmission lines and high-voltage substations, which certainly cannot be developed by the target year. Therefore, V2G technology can help reduce the stress on distribution networks while integrating wind and solar resources. This trend is due to the increasing need for weather forecasting, modeling the uncertainty of highly fluctuating wind and solar resources, allocation and sizing of charging stations, and bi/directional power exchange in real time, increasing the need for ML/DL models.
- Marine electrification: Although the concept of electric mobility is mostly associated with electric personal cars, zero-carbon policies have also gradually included the electrification of maritime transport and light and semi-heavy trucks. Cruise ships, Ro-Ro, and electric ferries need energy management in line with grid conditions when anchoring in ports due to constant load consumption and day-ahead planning. ML/DL models can help the integration of the marine electrical and power grid by predicting the load, weather conditions, and ship load management. On the other hand, the prediction of nodal voltage and participating in voltage response programs that the power grid suffers from in the presence of electrical ships can be controlled by prediction and preventive management by ML/DL models.
- Battery swapping station: Reducing the charging time and traveling long distances is another important trend in the field of transportation electrification, which seems to be covered under the shadow of AL models in the future. Battery swapping stations that have recently been used as pilots have provided promising results in solving this problem, reducing the charging time and inconvenient stops for EVs [116]. Under these conditions, the driver can replace the battery with a full one in a short time (less than 5 min). This method requires the definition of the ID for each vehicle and each battery. On the other hand, since the replacement time is a matter of taste, it can destroy the life and health of the battery. The infrastructure of automatic battery replacement and physical/cybersecurity are among the problems of this challenge, which ML/DL models can propose a solution for with temporal and spatial prediction and integration with GAS-based models. On the other hand, due to the traffic network being affected by battery swapping stations, there is a need to collect and process a large amount of information. Therefore, robust training is needed to increase the efficiency of battery swapping stations so that the driver can decide the most optimal route, battery, and time of charging based on it.
- Wireless Charging: ML/DL has transformative potential in advancing wireless charging and smart road systems for electric vehicles, offering multifaceted benefits across various domains. Beyond optimizing infrastructure placement and dynamically managing charging parameters, ML/DL algorithms can revolutionize wireless charging systems by refining energy transfer efficiency, adapting to diverse vehicle types and battery technologies, and mitigating charging infrastructure costs through predictive maintenance and intelligent energy routing. Moreover, ML/DL can enhance user experiences by adjusting charging schedules to individual preferences, integrating seamlessly with smart home and grid systems for holistic energy management, and facilitating convenient payment and authentication processes. Additionally, the application of ML/DL in wireless charging can extend to innovative areas such as dynamic charging lanes on highways, where vehicles can charge while in motion, and wireless charging pads embedded in parking lots, offering autonomous charging services.
- Autonomous Electric Vehicles: The field of autonomous electric vehicles (AEVs) is experiencing rapid advancement, driven by breakthroughs in artificial intelligence, sensor technology, and electric propulsion systems. As ML/DL algorithms continue to evolve, they enable autonomous vehicles to perceive and interpret their surroundings with unprecedented accuracy and efficiency, paving the way for safer and more reliable AD experiences. Moreover, the electrification of vehicle fleets is gaining momentum, spurred by the growing awareness of environmental sustainability and the declining costs of battery technology. This convergence of AD and electric propulsion is reshaping the future of transportation with a shift toward shared mobility services, such as autonomous robo-taxis and on-demand electric shuttles. Looking ahead, the future trends in autonomous EVs are likely to focus on enhancing vehicle autonomy levels, expanding deployment in urban environments, integrating with smart city infrastructure, and advancing toward fully autonomous, driverless transportation networks. As these technologies mature, autonomous EVs have the potential to revolutionize mobility, offering safer, greener, and more accessible transportation solutions for people and goods alike.
- Cybersecurity: As the technologies of EVs and ML/DL models continue to evolve and improve, the risks of cyber-attacks and information security breaches pose increasingly significant threats. Consequently, there is a growing imperative to develop more robust and reliable ML/DL models to safeguard these systems. This trend toward enhancing the resilience and security of ML/DL models is poised to become a permanent fixture in the landscape of electric mobility and AI integration. By prioritizing the development of sophisticated security measures and incorporating robustness into ML/DL algorithms, stakeholders can fortify EVs and associated technologies against potential cyber threats, ensuring the continued safety and integrity of future mobility systems.
- Application of New Framework for Input Features: While input features for ML and DL methods in electromobility can include a set of scalar features [117], using time-series input is also crucial, particularly for deep learning methods. Therefore, identifying the most appropriate input features before applying DL methods, such as CNNs [118], is essential. This approach will enable the model to uncover the most relevant features effectively.
- Battery Management: In the context of battery management, future research should focus on developing targeted strategies to enhance the performance and adaptability of battery systems. One critical area for improvement is the generalization of ML models, particularly when operating with limited datasets. Researchers could explore techniques such as transfer learning or data augmentation to enable these models to make more accurate predictions in diverse operating conditions [119]. Additionally, there is a pressing need for the development of smarter, more adaptive charging infrastructure strategies. This could involve the integration of real-time data analytics and IoT technologies to optimize charging cycles based on user behavior and grid conditions, thereby improving overall energy efficiency and extending battery life. By addressing these specific areas, future research can significantly contribute to the advancement of battery management systems.
- Range Prediction: In light of the evolving landscape of range prediction, future research should focus on several key areas to enhance the effectiveness and applicability of machine learning models. Firstly, improving generalization in ML models with limited data is crucial. This can be achieved through techniques such as data augmentation, transfer learning, and the development of more robust model architectures that can leverage small datasets effectively. Additionally, there is a pressing need to innovate smarter and more adaptive charging infrastructure strategies. Research could explore the integration of real-time data analytics and predictive modeling to optimize charging station placements and improve energy distribution. By focusing on these targeted recommendations, researchers can contribute significantly to the advancement of range prediction methodologies and their practical applications.
- Charging Infrastructure Optimization: Concerning the evolving landscape of EV adoption, it is imperative to focus on specific strategies for optimizing charging infrastructure. One critical area for future research is enhancing the generalization capabilities of ML models, particularly in scenarios where data are limited. By developing robust algorithms that can effectively learn from sparse datasets, we can improve the accuracy of demand forecasting and user behavior prediction, thereby optimizing charging station placement and capacity. Additionally, there is a significant opportunity to innovate smarter, more adaptive charging infrastructure strategies. This could involve integrating real-time data analytics and IoT technologies to dynamically adjust charging rates based on grid demand and user preferences, ultimately leading to a more efficient and user-friendly charging experience. Targeted research in these areas will not only advance the field but also facilitate the seamless integration of EVs into our existing transportation networks.
- Energy Management: Regarding energy management, it is essential to refine our approach to future research trends by emphasizing specific, actionable recommendations. One promising direction involves enhancing the generalization capabilities of machine learning models, particularly in scenarios with limited data. This could be achieved through techniques such as transfer learning or data augmentation, which allow models to learn more effectively from smaller datasets [120]. Additionally, developing smarter and more adaptive charging infrastructure strategies can significantly improve energy efficiency and user experience. This may include the integration of real-time data analytics to optimize charging schedules based on demand forecasts and user behavior patterns. By focusing on these targeted areas, future research can contribute to more robust and innovative solutions within the energy management sector.
- Predictive Maintenance: In the context of predictive maintenance, future research should focus on enhancing the generalization capabilities of machine learning models, particularly in scenarios where data are limited. This can be achieved by exploring advanced techniques such as transfer learning and few-shot learning, which enable models to leverage knowledge from related tasks or datasets, thereby improving their predictive accuracy in low-data environments [119]. Additionally, the development of smarter and more adaptive charging infrastructure strategies is crucial. Future studies could investigate the integration of real-time data analytics and IoT technologies to create dynamic charging solutions that adjust to the operational needs of various assets. By implementing these targeted approaches, researchers can significantly contribute to the efficiency and reliability of predictive maintenance systems.
- Traffic Management: In light of the evolving challenges in traffic management, future research should focus on developing more targeted strategies to enhance the effectiveness of ML models, particularly in scenarios with limited data availability. One promising avenue is the exploration of transfer learning techniques that allow models to generalize better across different traffic conditions and environments, thereby improving their predictive capabilities. Additionally, there is a pressing need to innovate smarter and more adaptive charging infrastructures for EVs. This includes integrating real-time data analytics to optimize charging station locations and availability based on traffic patterns and demand forecasts. By addressing these specific areas, researchers can significantly contribute to the advancement of traffic management systems, ultimately leading to more efficient and sustainable urban mobility solutions.
- Fleet Management: Future research on fleet management should focus on enhancing the generalization capabilities of ML models, particularly in scenarios where data availability is limited. One promising avenue is the development of transfer learning techniques that leverage pre-trained models on similar datasets, thereby improving the robustness and accuracy of predictions in diverse operational environments. Additionally, research should explore the design of smarter and more adaptive charging infrastructure strategies, which can optimize energy distribution and minimize downtime for electric fleets. This could involve the integration of real-time data analytics to anticipate charging needs based on fleet utilization patterns, as well as the implementation of dynamic pricing models that encourage off-peak charging. By addressing these specific areas, researchers can contribute significantly to the advancement of fleet management systems that are both efficient and sustainable.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| AI | Artificial Intelligence | MAPE | Mean Absolute Percentage Error |
| A2C | Advantage Actor Critic | MARL | Multi-Agent RL |
| ACE | Area Control Error | MC | Markov Chain |
| AD | Autonomous Driving | MDA | Modified Dragonfly Algorithm |
| ADB | Automated Driving Behavior | MDP | Markov Decision Process |
| ADMM | Alternating Direction Method of Multipliers | MILP | Mixed-Integer Linear Program |
| AmoD | Autonomous Mobility-on-Demand | ML | Machine Learning |
| AOA | Arithmetic Optimization Algorithm | M-LSTM | Multiplicative LSTM |
| AUC | Area Under Curve | MPC | Model Predictive Control |
| AVs | Autonomous Vehicles | MSE | Mean Squared Error |
| BCE | Bundled Causality Engine | NEDC | New European Driving Cycle |
| Bi-LSTM | Bidirectional LSTM | NN | Neural Network |
| BLP | Binary Linear Programming | NRMSE | Normalized Root Mean Squared Error |
| BSS | Battery Swapping Station | OSM | Open Street Map |
| CARLA | Computer Assisted Real-time Layout | PCA | Principal Component Analysis |
| CD-CS | Charge-Depleting Charge-Sustaining | PDB | Personal Driving Behavior |
| CL | Continual Learning | PdM | Predictive Maintenance |
| CNN | Convolutional Neural Network | PF | Particle Filter |
| Cox PHM | Proportional Hazard Model | PG | Policy Gradient |
| DBN | Deep Bayesian Networks | PHEVs | Plug-in Hybrid Electric Vehicles |
| DDB | Desired Driving Behavior | POMDP | Partially Observable Markov Decision Process |
| DDPG | Deep Deterministic Policy Gradient | PR-BPM | Predictive Maximum Bipartite Matching |
| DDQL | Double Deep-Q Learning | PR-NTNR | Predictive Nearest-Taxi/Nearest-Request |
| DL | Deep Learning | QKLMS-FB | Fixed-Budget Quantized Kernel Least Mean Squares |
| DLSTM | Distributed Long Short-Term Memory | RBF | Radial Basis Function |
| DNN | Deep Neural Network | RBMs | Restricted Boltzmann Machines |
| DQN | Deep Q-Network | RDC | Real Driving Cycle |
| DRL | Deep Reinforcement Learning | RDR | Remaining Driving Range |
| DT | Digital Twin | RF | Random Forest |
| DVA | Deep Visual Analytics | RL | Reinforcement Learning |
| EF | Exponential Function | RMSE | Root Mean Squared Error |
| ELM | Extreme Learning Machines | RMSPE | Root Mean Squared Percentage Error |
| EMD | Empirical Mode Decomposition | RNN | Recurrent Neural Networks |
| EMS | Energy Management Strategy | RSUs | Remote Sensing Units |
| ERIS | Energy Research and Investment Strategies | RUL | Remaining Useful Life |
| EVs | Electric Vehicles | RVM | Relevance Vector Machine |
| FNN | Feedforward Neural Networks | SA | Simulated Annealing |
| GA | Genetic Algorithm | SAC | Soft Actor–Critic |
| GIS | Geographic Information System | SAE | Stacked Autoencoder |
| GNNs | Graph Neural Networks | SDN | Software-Defined Networking |
| GPR | Gaussian Process Regression | SHAP | Shapley Additive Explanations |
| GPS-IMU | GPS–Inertial Measurement Unit | SIFT | Scale-Invariant Feature Transform |
| GRU | Gated Recurrent Unit | SLAM | Simultaneous Localization and Mapping |
| HEV | Hybrid Electric Vehicle | SOC | State Of Charge |
| HOG | Histogram of Oriented Gradients | SOH | State Of Health |
| ICA | Incremental Capacity Analysis | SVM | Support Vector Machines |
| ICEVs | Internal Combustion Engine Vehicles | SVR | Support Vector Regression |
| IOT | Internet of Things | TF | Transfer Learning |
| ITS | Intelligent Transportation System | TIBeM | Time Interval Between Measurements |
| KAF | Kernel Adaptive Filtering | TRPO | Trust Region Policy Optimization |
| KNN | K-Nearest Neighbor | V2G | Vehicle-to-Grid |
| KRLS-T | Kernel Recursive Least-Squares Tracker | V2H | Vehicle-to-Home |
| LiDAR | Light Detection and Ranging | VT-CPEM | Virginia Tech Comprehensive Power-based EV energy consumption Model |
| LSTM | Long Short-Term Memory | WLTC | Worldwide Light-duty Test Cycle |
| LSTM-IMPC | LSTM-based Improved Model Predictive Control | WOA | Whale Optimization Algorithm |
| MAB | Multi-Arm Bandit | XGBoost | eXtreme Gradient Boosting |
| MAE | Mean Absolute Error | YOLO | You Only Look Once |
| MAP | Memory, Attentiveness, and Prediction | AEVs | Autonomous Electric Vehicles |
References
- Sharma, A.K.; Roychoudhury, S.; Saha, S. Electric Mobility. In The Internet of Energy; Apple Academic Press: Cambridge, MA, USA, 2024; pp. 251–265. [Google Scholar]
- Ritchie, H. Tracking Global Data on Electric Vehicles. Our World Data. 2024. Available online: https://ourworldindata.org/electric-car-sales (accessed on 21 March 2024).
- Mirzaei, M.A.; Hemmati, M.; Zare, K.; Mohammadi-Ivatloo, B.; Abapour, M.; Marzband, M.; Farzamnia, A. Two-stage robust-stochastic electricity market clearing considering mobile energy storage in rail transportation. IEEE Access 2020, 8, 121780–121794. [Google Scholar] [CrossRef]
- Dixon, J.; Zhou, Z.; Phommachanh, S.; Kythavone, S.; Inthavongsa, P.; Hirmer, S.A. Plugging into green growth: Towards e-mobility and renewable energy integration in Lao PDR. Energy Strat. Rev. 2023, 48, 101099. [Google Scholar] [CrossRef]
- Parkhurst, G. The Electrification of Automobility. In Transport and Sustainability; Emerald Publishing Limited: Leeds, UK, 2022; Volume 15, pp. 3–12. [Google Scholar] [CrossRef]
- Kraus, S.; Grube, T.; Stolten, D. Mobility Trends in Transport Sector Modeling. Futur. Transp. 2022, 2, 184–215. [Google Scholar] [CrossRef]
- Pani, A.; Balla, S.N.; Sahu, P.K. Decoding consumer-centric transition to electric mobility based on sentiment, semantic and statistical analysis. Res. Transp. Bus. Manag. 2023, 51, 101069. [Google Scholar] [CrossRef]
- Li, X.; Lepour, D.; Heymann, F.; Maréchal, F. Electrification and digitalization effects on sectoral energy demand and consumption: A prospective study towards 2050. Energy 2023, 279, 127992. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Somayaji, S.R.K.; Gadekallu, T.R.; Alazab, M.; Maddikunta, P.K.R. A review on deep learning for future smart cities. Internet Technol. Lett. 2022, 5, e187. [Google Scholar] [CrossRef]
- Nikitas, A.; Michalakopoulou, K.; Njoya, E.T.; Karampatzakis, D. Artificial Intelligence, Transport and the Smart City: Definitions and Dimensions of a New Mobility Era. Sustainability 2020, 12, 2789. [Google Scholar] [CrossRef]
- Kim, J.; Moon, Y.-J.; Suh, I.-S. Smart Mobility Strategy in Korea on Sustainability, Safety and Efficiency Toward 2025. IEEE Intell. Transp. Syst. Mag. 2015, 7, 58–67. [Google Scholar] [CrossRef]
- Wittmann, J. Electrification and digitalization as disruptive trends: New perspectives for the automotive industry? In Phantom Ex Machina: Digital Disruption’s Role in Business Model Transformation; Springer: Cham, Switzerland, 2016; pp. 137–159. [Google Scholar] [CrossRef]
- Chandler, S.; Gartner, J.; Jones, D. Integrating Electric Vehicles with Energy Storage and Grids: New Technology and Specific Capabilities Spur Numerous Applications. IEEE Electrif. Mag. 2018, 6, 38–43. [Google Scholar] [CrossRef]
- Iwendi, C.; Maddikunta, P.K.R.; Gadekallu, T.R.; Lakshmanna, K.; Bashir, A.K.; Piran, M.J. A metaheuristic optimization approach for energy efficiency in the IoT networks. Softw. Pract. Exp. 2021, 51, 2558–2571. [Google Scholar] [CrossRef]
- Ullah, A.; Anwar, S.M.; Li, J.; Nadeem, L.; Mahmood, T.; Rehman, A.; Saba, T. Smart cities: The role of Internet of Things and machine learning in realizing a data-centric smart environment. Complex Intell. Syst. 2023, 10, 1607–1637. [Google Scholar] [CrossRef]
- Srihith, I.V.D.; Kumar, I.V.S.; Varaprasad, R.; Mohan, Y.R.; Srinivas, T.A.S.; Sravanthi, Y. Future of Smart Cities: The Role of Machine Learning and Artificial Intelligence. South Asian Res. J. Eng. Technol. 2022, 4, 110–119. [Google Scholar] [CrossRef]
- Cheng, H.; Xie, Z.; Shi, Y.; Xiong, N. Multi-Step Data Prediction in Wireless Sensor Networks Based on One-Dimensional CNN and Bidirectional LSTM. IEEE Access 2019, 7, 117883–117896. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Longo, M.; Brenna, M. Knowledge Extraction From PV Power Generation With Deep Learning Autoencoder and Clustering-Based Algorithms. IEEE Access 2023, 11, 69227–69240. [Google Scholar] [CrossRef]
- Li, Q.; Wang, F.; Wang, J.; Li, W. LSTM-based SQL Injection Detection Method for Intelligent Transportation System. IEEE Trans. Veh. Technol. 2019, 68, 4182–4191. [Google Scholar] [CrossRef]
- Farmann, A.; Waag, W.; Marongiu, A.; Sauer, D.U. Critical review of on-board capacity estimation techniques for lithium-ion batteries in electric and hybrid electric vehicles. J. Power Sources 2015, 281, 114–130. [Google Scholar] [CrossRef]
- Shen, M.; Gao, Q. A review on battery management system from the modeling efforts to its multiapplication and integration. Int. J. Energy Res. 2019, 43, 5042–5075. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Ardeshiri, R.R.; Balagopal, B.; Alsabbagh, A.; Ma, C.; Chow, M.Y. Machine Learning Approaches in Battery Management Systems: State of the Art: Remaining useful life and fault detection. In Proceedings of the 2020 2nd IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Cagliari, Italy, 1–3 September 2020; pp. 61–66. [Google Scholar] [CrossRef]
- Eleftheriadis, P.; Giazitzis, S.; Leva, S.; Ogliari, E. Data-Driven Methods for the State of Charge Estimation of Lithium-Ion Batteries: An Overview. Forecasting 2023, 5, 576–599. [Google Scholar] [CrossRef]
- Vidal, C.; Malysz, P.; Kollmeyer, P.; Emadi, A. Machine Learning Applied to Electrified Vehicle Battery State of Charge and State of Health Estimation: State-of-the-Art. IEEE Access 2020, 8, 52796–52814. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Ansari, S.; Miah, S.; Meraj, S.T.; Hasan, K.; Shihavuddin, A.; Hannan, M.; Muttaqi, K.M.; Hussain, A. Deep learning enabled state of charge, state of health and remaining useful life estimation for smart battery management system: Methods, implementations, issues and prospects. J. Energy Storage 2022, 55, 105752. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.E.; Yang, Y. Advanced Machine Learning Approach for Lithium-Ion Battery State Estimation in Electric Vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 140–149. [Google Scholar] [CrossRef]
- Eaty, N.D.K.M.; Bagade, P. Digital twin for electric vehicle battery management with incremental learning. Expert Syst. Appl. 2023, 229, 120444. [Google Scholar] [CrossRef]
- Zhao, L.; Yao, W.; Wang, Y.; Hu, J. Machine Learning-Based Method for Remaining Range Prediction of Electric Vehicles. IEEE Access 2020, 8, 212423–212441. [Google Scholar] [CrossRef]
- Varga, B.O.; Sagoian, A.; Mariasiu, F. Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges. Energies 2019, 12, 946. [Google Scholar] [CrossRef]
- Rhode, S.; Van Vaerenbergh, S.; Pfriem, M. Power prediction for electric vehicles using online machine learning. Eng. Appl. Artif. Intell. 2020, 87, 103278. [Google Scholar] [CrossRef]
- Kim, D.; Shim, H.G.; Eo, J.S. A Machine Learning Method for EV Range Prediction with Updates on Route Information and Traffic Conditions. Proc. AAAI Conf. Artif. Intell. 2022, 36, 12545–12551. [Google Scholar] [CrossRef]
- Shanmuganathan, J.; Victoire, A.A.; Balraj, G.; Victoire, A. Deep Learning LSTM Recurrent Neural Network Model for Prediction of Electric Vehicle Charging Demand. Sustainability 2022, 14, 10207. [Google Scholar] [CrossRef]
- George, D.; Sivraj, P. Driving Range Estimation of Electric Vehicles using Deep Learning. In Proceedings of the 2nd International Conference on Electronics and Sustainable Communication Systems, ICESC 2021, Coimbatore, India, 4–6 August 2021; pp. 358–365. [Google Scholar] [CrossRef]
- Mei, P.; Karimi, H.R.; Huang, C.; Chen, F.; Yang, S. Remaining driving range prediction for electric vehicles: Key challenges and outlook. IET Control Theory Appl. 2023, 17, 1875–1893. [Google Scholar] [CrossRef]
- Xi, X.; Sioshansi, R.; Marano, V. Simulation–optimization model for location of a public electric vehicle charging infrastructure. Transp. Res. Part D Transp. Environ. 2013, 22, 60–69. [Google Scholar] [CrossRef]
- Deb, S.; Tammi, K.; Kalita, K.; Mahanta, P. Review of recent trends in charging infrastructure planning for electric vehicles. Wiley Interdiscip. Rev. Energy Environ. 2018, 7, e306. [Google Scholar] [CrossRef]
- Yi, Z.; Bauer, P.H. Optimization models for placement of an energy-aware electric vehicle charging infrastructure. Transp. Res. Part E Logist. Transp. Rev. 2016, 91, 227–244. [Google Scholar] [CrossRef]
- Xiao, D.; An, S.; Cai, H.; Wang, J.; Cai, H. An optimization model for electric vehicle charging infrastructure planning considering queuing behavior with finite queue length. J. Energy Storage 2020, 29, 101317. [Google Scholar] [CrossRef]
- Frendo, O.; Graf, J.; Gaertner, N.; Stuckenschmidt, H. Data-driven smart charging for heterogeneous electric vehicle fleets. Energy AI 2020, 1, 100007. [Google Scholar] [CrossRef]
- Al-Gabalawy, M. Reinforcement learning for the optimization of electric vehicle virtual power plants. Int. Trans. Electr. Energy Syst. 2021, 31, e12951. [Google Scholar] [CrossRef]
- Mazhar, T.; Asif, R.N.; Malik, M.A.; Nadeem, M.A.; Haq, I.; Iqbal, M.; Kamran, M.; Ashraf, S. Electric Vehicle Charging System in the Smart Grid Using Different Machine Learning Methods. Sustainability 2023, 15, 2603. [Google Scholar] [CrossRef]
- Uçar, A.; Demir, Y.; Güzeliş, C. Object recognition and detection with deep learning for autonomous driving applications. Simulation 2017, 93, 759–769. [Google Scholar] [CrossRef]
- Fujiyoshi, H.; Hirakawa, T.; Yamashita, T. Deep learning-based image recognition for autonomous driving. IATSS Res. 2019, 43, 244–252. [Google Scholar] [CrossRef]
- Nourali, K.; Dolkhani, E. Scene Text Visual Question Answering by Using YOLO and STN. Int. J. Speech Technol. 2024, 27, 69–76. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T.; Macesanu, G. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2020, 37, 362–386. [Google Scholar] [CrossRef]
- Muhammad, K.; Ullah, A.; Lloret, J.; Del Ser, J.; de Albuquerque, V.H.C. Deep Learning for Safe Autonomous Driving: Current Challenges and Future Directions. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4316–4336. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep Learning-Based Vehicle Behavior Prediction for Autonomous Driving Applications: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 33–47. [Google Scholar] [CrossRef]
- Lee, D.J.; Im, J.; Won, J.H. Virtual Lidar Sensor Intensity Data Modeling for Autonomous Driving Simulators. IEEE Access 2023, 11, 120694–120706. [Google Scholar] [CrossRef]
- Liao, Y.; Yu, G.; Chen, P.; Zhou, B.; Li, H. Integration of Decision-making and Motion Planning for Autonomous Driving based on Double-layer Reinforcement Learning Framework. IEEE Trans. Veh. Technol. 2023, 73, 3142–3158. [Google Scholar] [CrossRef]
- Xu, M.; Niyato, D.; Chen, J.; Zhang, H.; Kang, J.; Xiong, Z.; Mao, S.; Han, Z. Generative AI-Empowered Simulation for Autonomous Driving in Vehicular Mixed Reality Metaverses. IEEE J. Sel. Top. Signal Process. 2023, 17, 1064–1079. [Google Scholar] [CrossRef]
- Vasile, L.; Dinkha, N.; Seitz, B.; Däsch, C.; Schramm, D. Comfort and Safety in Conditional Automated Driving in Dependence on Personal Driving Behavior. IEEE Open J. Intell. Transp. Syst. 2023, 4, 772–784. [Google Scholar] [CrossRef]
- Available online: https://waymo.com/waymo-driver/ (accessed on 21 March 2024).
- Afrasiabi, M.; Mohammadi, M.; Rastegar, M.; Kargarian, A. Multi-agent microgrid energy management based on deep learning forecaster. Energy 2019, 186, 115873. [Google Scholar] [CrossRef]
- Lan, T.; Jermsittiparsert, K.; Alrashood, S.T.; Rezaei, M.; Al-Ghussain, L.; Mohamed, M.A. An Advanced Machine Learning Based Energy Management of Renewable Microgrids Considering Hybrid Electric Vehicles’ Charging Demand. Energies 2021, 14, 569. [Google Scholar] [CrossRef]
- Lian, R.; Tan, H.; Peng, J.; Li, Q.; Wu, Y. Cross-Type Transfer for Deep Reinforcement Learning Based Hybrid Electric Vehicle Energy Management. IEEE Trans. Veh. Technol. 2020, 69, 8367–8380. [Google Scholar] [CrossRef]
- Sun, X.; Fu, J.; Yang, H.; Xie, M.; Liu, J. An energy management strategy for plug-in hybrid electric vehicles based on deep learning and improved model predictive control. Energy 2023, 269, 126772. [Google Scholar] [CrossRef]
- Laroui, M.; Dridi, A.; Afifi, H.; Moungla, H.; Marot, M.; Cherif, M.A. Energy management for electric vehicles in smart cities: A deep learning approach. In Proceedings of the 2019 15th International Wireless Communications and Mobile Computing Conference, IWCMC 2019, Tangier, Morocco, 24–28 June 2019; pp. 2080–2085. [Google Scholar] [CrossRef]
- Song, C.; Kim, K.; Sung, D.; Kim, K.; Yang, H.; Lee, H.; Cho, G.Y.; Cha, S.W. A Review of Optimal Energy Management Strategies Using Machine Learning Techniques for Hybrid Electric Vehicles. Int. J. Automot. Technol. 2021, 22, 1437–1452. [Google Scholar] [CrossRef]
- Mohammadi, Y.; Miraftabzadeh, S.M.; Bollen, M.H.; Longo, M. Seeking patterns in rms voltage variations at the sub-10-minute scale from multiple locations via unsupervised learning and patterns’ post-processing. Int. J. Electr. Power Energy Syst. 2022, 143, 108516. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Colombo, C.G.; Longo, M.; Foiadelli, F. K-Means and Alternative Clustering Methods in Modern Power Systems. IEEE Access 2023, 11, 119596–119633. [Google Scholar] [CrossRef]
- Wang, Y.; Tan, H.; Wu, Y.; Peng, J. Hybrid Electric Vehicle Energy Management With Computer Vision and Deep Reinforcement Learning. IEEE Trans. Ind. Inform. 2021, 17, 3857–3868. [Google Scholar] [CrossRef]
- Estrada, P.M.; de Lima, D.; Bauer, P.H.; Mammetti, M.; Bruno, J.C. Deep learning in the development of energy Management strategies of hybrid electric Vehicles: A hybrid modeling approach. Appl. Energy 2023, 329, 120231. [Google Scholar] [CrossRef]
- Available online: https://xray.greyb.com/ev-battery/tesla-innovations-in-battery-management-systems (accessed on 21 March 2024).
- Theissler, A.; Pérez-Velázquez, J.; Kettelgerdes, M.; Elger, G. Predictive maintenance enabled by machine learning: Use cases and challenges in the automotive industry. Reliab. Eng. Syst. Saf. 2021, 215, 107864. [Google Scholar] [CrossRef]
- Arena, F.; Collotta, M.; Luca, L.; Ruggieri, M.; Termine, F.G. Predictive Maintenance in the Automotive Sector: A Literature Review. Math. Comput. Appl. 2022, 27, 2. [Google Scholar] [CrossRef]
- Carvalho, T.P.; Soares, F.A.; Vita, R.; Francisco, R.D.P.; Basto, J.P.; Alcalá, S.G. A systematic literature review of machine learning methods applied to predictive maintenance. Comput. Ind. Eng. 2019, 137, 106024. [Google Scholar] [CrossRef]
- Zhao, J.; Ling, H.; Liu, J.; Wang, J.; Burke, A.F.; Lian, Y. Machine learning for predicting battery capacity for electric vehicles. eTransportation 2023, 15, 100214. [Google Scholar] [CrossRef]
- Chen, C.; Liu, Y.; Sun, X.; Di Cairano-Gilfedder, C.; Titmus, S. An integrated deep learning-based approach for automobile maintenance prediction with GIS data. Reliab. Eng. Syst. Saf. 2021, 216, 107919. [Google Scholar] [CrossRef]
- Hurtado, J.; Salvati, D.; Semola, R.; Bosio, M.; Lomonaco, V. Continual learning for predictive maintenance: Overview and challenges. Intell. Syst. Appl. 2023, 19, 200251. [Google Scholar] [CrossRef]
- de León Hijes, F.C.G.; Robles, J.S.; García, F.M.M.; García, M.A. Dynamic management of periodicity between measurements in predictive maintenance. Measurement 2023, 213, 112721. [Google Scholar] [CrossRef]
- Chen, C.; Fu, H.; Zheng, Y.; Tao, F.; Liu, Y. The advance of digital twin for predictive maintenance: The role and function of machine learning. J. Manuf. Syst. 2023, 71, 581–594. [Google Scholar] [CrossRef]
- Available online: https://www.leewayhertz.com/ai-in-fleet-management/ (accessed on 21 March 2024).
- Boucher, M. Transportation Electrification and Managing Traffic Congestion: The role of intelligent transportation systems. IEEE Electrification Mag. 2019, 7, 16–22. [Google Scholar] [CrossRef]
- Cordova, J.; Sriram, L.M.K.; Kocatepe, A.; Zhou, Y.; Ozguven, E.E.; Arghandeh, R. Combined Electricity and Traffic Short-Term Load Forecasting Using Bundled Causality Engine. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3448–3458. [Google Scholar] [CrossRef]
- Singh, R.; Sharma, R.; Akram, S.V.; Gehlot, A.; Buddhi, D.; Malik, P.K.; Arya, R. Highway 4.0: Digitalization of highways for vulnerable road safety development with intelligent IoT sensors and machine learning. Saf. Sci. 2021, 143, 105407. [Google Scholar] [CrossRef]
- Zaman, M.; Saha, S.; Abdelwahed, S. Assessing the Suitability of Different Machine Learning Approaches for Smart Traffic Mobility. In Proceedings of the 2023 IEEE Transportation Electrification Conference and Expo, ITEC 2023, Detroit, MI, USA, 21–23 June 2023. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.-Y. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Polson, N.G.; Sokolov, V.O. Deep learning for short-term traffic flow prediction. Transp. Res. Part C Emerg. Technol. 2017, 79, 1–17. [Google Scholar] [CrossRef]
- Fiori, C.; Arcidiacono, V.; Fontaras, G.; Makridis, M.; Mattas, K.; Marzano, V.; Thiel, C.; Ciuffo, B. The effect of electrified mobility on the relationship between traffic conditions and energy consumption. Transp. Res. Part D Transp. Environ. 2019, 67, 275–290. [Google Scholar] [CrossRef]
- Kashyap, A.A.; Raviraj, S.; Devarakonda, A.; Nayak K, S.R.; KV, S.; Bhat, S.J. Traffic flow prediction models—A review of deep learning techniques. Cogent Eng. 2022, 9, 2010510. [Google Scholar] [CrossRef]
- Wu, Y.; Tan, H.; Chen, X.; Ran, B. Memory, attention and prediction: A deep learning architecture for car-following. Transp. B 2019, 7, 1553–1571. [Google Scholar] [CrossRef]
- Tam, P.; Song, I.; Kang, S.; Ros, S.; Kim, S. Graph Neural Networks for Intelligent Modelling in Network Management and Orchestration: A Survey on Communications. Electronics 2022, 11, 3371. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, J.; Min, G.; Zhao, Z.; Chang, Z.; Wang, Z. Spatial-Temporal Cellular Traffic Prediction for 5G and Beyond: A Graph Neural Networks-Based Approach. IEEE Trans. Ind. Inform. 2023, 19, 5722–5731. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, Y.; Khan, F.; Al-Atawi, A.A.; Al Abdulwahid, A.; Lee, Y.; Marapelli, B. Traffic Management in IoT Backbone Networks Using GNN and MAB with SDN Orchestration. Sensors 2023, 23, 7091. [Google Scholar] [CrossRef] [PubMed]
- Mouli, G.R.C.; Kefayati, M.; Baldick, R.; Bauer, P. Integrated PV Charging of EV Fleet Based on Energy Prices, V2G, and Offer of Reserves. IEEE Trans. Smart Grid 2019, 10, 1313–1325. [Google Scholar] [CrossRef]
- Turton, H.; Moura, F. Vehicle-to-grid systems for sustainable development: An integrated energy analysis. Technol. Forecast. Soc. Chang. 2008, 75, 1091–1108. [Google Scholar] [CrossRef]
- Wen, Y.; Fan, P.; Hu, J.; Ke, S.; Wu, F.; Zhu, X. An Optimal Scheduling Strategy of a Microgrid with V2G Based on Deep Q-Learning. Sustainability 2022, 14, 10351. [Google Scholar] [CrossRef]
- Oad, A.; Ahmad, H.G.; Talpur, M.S.H.; Zhao, C.; Pervez, A. Green smart grid predictive analysis to integrate sustainable energy of emerging V2G in smart city technologies. Optik 2023, 272, 170146. [Google Scholar] [CrossRef]
- Sovacool, B.K.; Kester, J.; Noel, L.; de Rubens, G.Z. Actors, business models, and innovation activity systems for vehicle-to-grid (V2G) technology: A comprehensive review. Renew. Sustain. Energy Rev. 2020, 131, 109963. [Google Scholar] [CrossRef]
- Hao, X.; Chen, Y.; Wang, H.; Wang, H.; Meng, Y.; Gu, Q. A V2G-oriented reinforcement learning framework and empirical study for heterogeneous electric vehicle charging management. Sustain. Cities Soc. 2023, 89, 104345. [Google Scholar] [CrossRef]
- Alfaverh, F.; Denaï, M.; Sun, Y. Optimal vehicle-to-grid control for supplementary frequency regulation using deep reinforcement learning. Electr. Power Syst. Res. 2023, 214, 108949. [Google Scholar] [CrossRef]
- Naik, N.; Vyjayanthi, C. Optimization of Vehicle-to-Grid (V2G) Services for Development of Smart Electric Grid: A Review. In Proceedings of the 2021 International Conference on Smart Generation Computing, Communication and Networking, SMART GENCON 2021, Pune, India, 29–30 October 2021. [Google Scholar] [CrossRef]
- Available online: https://uk.nissannews.com/en-GB/releases/nissan-to-launch-affordable-vehicle-to-grid-technology-from-2026 (accessed on 21 March 2024).
- Turan, B.; Pedarsani, R.; Alizadeh, M. Dynamic pricing and fleet management for electric autonomous mobility on demand systems. Transp. Res. Part C Emerg. Technol. 2020, 121, 102829. [Google Scholar] [CrossRef]
- Ding, Z.; Tan, W.; Lee, W.-J.; Pan, X.; Gao, S. Integrated Operation Model for Autonomous Mobility-on-Demand Fleet and Battery Swapping Station. IEEE Trans. Ind. Appl. 2021, 57, 5593–5602. [Google Scholar] [CrossRef]
- Luo, M.; Du, B.; Zhang, W.; Song, T.; Li, K.; Zhu, H.; Birkin, M.; Wen, H. Fleet Rebalancing for Expanding Shared e-Mobility Systems: A Multi-Agent Deep Reinforcement Learning Approach. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3868–3881. [Google Scholar] [CrossRef]
- Abouelela, M.; Lyu, C.; Antoniou, C. Exploring the Potentials of Open-Source Big Data and Machine Learning in Shared Mobility Fleet Utilization Prediction. Data Sci. Transp. 2023, 5, 5. [Google Scholar] [CrossRef]
- Liang, Y.; Ding, Z.; Ding, T.; Lee, W.-J. Mobility-Aware Charging Scheduling for Shared On-Demand Electric Vehicle Fleet Using Deep Reinforcement Learning. IEEE Trans. Smart Grid 2021, 12, 1380–1393. [Google Scholar] [CrossRef]
- Wittmann, M.; Neuner, L.; Lienkamp, M. A Predictive Fleet Management Strategy for On-Demand Mobility Services: A Case Study in Munich. Electronics 2020, 9, 1021. [Google Scholar] [CrossRef]
- Tuchnitz, F.; Ebell, N.; Schlund, J.; Pruckner, M. Development and Evaluation of a Smart Charging Strategy for an Electric Vehicle Fleet Based on Reinforcement Learning. Appl. Energy 2021, 285, 116382. [Google Scholar] [CrossRef]
- Tapaskar, R.P.; Revankar, P.P.; Ganachari, S.V. Advancements in Battery Management Systems for Electric Vehicles: A MATLAB-Based Simulation of 4S3P Lithium-Ion Battery Packs. World Electr. Veh. J. 2024, 15, 222. [Google Scholar] [CrossRef]
- Alanazi, F. Electric Vehicles: Benefits, Challenges, and Potential Solutions for Widespread Adaptation. Appl. Sci. 2023, 13, 6016. [Google Scholar] [CrossRef]
- Singh, A.R.; Vishnuram, P.; Alagarsamy, S.; Bajaj, M.; Blazek, V.; Damaj, I.; Rathore, R.S.; Al-Wesabi, F.N.; Othman, K.M. Electric Vehicle Charging Technologies, Infrastructure Expansion, Grid Integration Strategies, and Their Role in Promoting Sustainable e-Mobility. Alex. Eng. J. 2024, 105, 300–330. [Google Scholar] [CrossRef]
- Miller, T.; Durlik, I.; Kostecka, E.; Borkowski, P.; Łobodzińska, A. A Critical AI View on Autonomous Vehicle Navigation: The Growing Danger. Electronics 2024, 13, 3660. [Google Scholar] [CrossRef]
- Lee, S.; Seon, J.; Hwang, B.; Kim, S.; Sun, Y.; Kim, J. Recent Trends and Issues of Energy Management Systems Using Machine Learning. Energies 2024, 17, 624. [Google Scholar] [CrossRef]
- Ucar, A.; Karakose, M.; Kırımça, N. Artificial Intelligence for Predictive Maintenance Applications: Key Components, Trustworthiness, and Future Trends. Appl. Sci. 2024, 14, 898. [Google Scholar] [CrossRef]
- Nigam, N.; Singh, D.P.; Choudhary, J. A Review of Different Components of the Intelligent Traffic Management System (ITMS). Symmetry 2023, 15, 583. [Google Scholar] [CrossRef]
- Escoto, M.; Guerrero, A.; Ghorbani, E.; Juan, A.A. Optimization Challenges in Vehicle-to-Grid (V2G) Systems and Artificial Intelligence Solving Methods. Appl. Sci. 2024, 14, 5211. [Google Scholar] [CrossRef]
- Farahpoor, M.; Esparza, O.; Soriano, M. Comprehensive IoT-driven Fleet Management System for Industrial Vehicles. IEEE Access 2023. [CrossRef]
- Xu, F.; Uszkoreit, H.; Du, Y.; Fan, W.; Zhao, D.; Zhu, J. Explainable AI: A brief survey on history, research areas, approaches and challenges. In Natural Language Processing and Chinese Computing: 8th CCF International Conference, NLPCC 2019, Dunhuang, China, 9–14 October 2019; Proceedings, Part II 8; Springer: Cham, Switzerland, 2019; pp. 563–574. [Google Scholar]
- Beer, D. How should we do the history of Big Data? Big Data Soc. 2016, 3, 2053951716646135. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Saldarini, A.; Cattaneo, L.; El Ajami, S.; Longo, M.; Foiadelli, F. Comparative analysis of decarbonization of local public transportation: A real case study. Heliyon 2024, 10, e25778. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Longo, M.; Foiadelli, F. Mobility and Future Trends. In Emerging Battery Technologies to Boost the Clean Energy Transition: Cost, Sustainability, and Performance Analysis; Passerini, S., Barelli, L., Baumann, M., Peters, J., Weil, M., Eds.; Springer International Publishing: Cham, Switzerland, 2024; pp. 3–11. [Google Scholar] [CrossRef]
- Hemmati, M.; Abapour, M.; Mohammadi-Ivatloo, B. Optimal Scheduling of Smart Microgrid in Presence of Battery Swapping Station of Electrical Vehicles. In Electric Vehicles in Energy Systems: Modelling, Integration, Analysis, and Optimization; Springer: Cham, Switzerland, 2020; pp. 249–267. [Google Scholar]
- Mohammadi, Y.; Miraftabzadeh, S.M.; Bollen, M.H.J.; Longo, M. Voltage-Sag Source Detection: Developing Supervised Methods and Proposing a New Unsupervised Learning. Sustain. Energy Grids Netw. 2022, 32, 100855. [Google Scholar] [CrossRef]
- Mohammadi, Y.; Polajžer, B.; Leborgne, R.C.; Khodadad, D. Most Influential Feature Form for Supervised Learning in Voltage Sag Source Localization. Eng. Appl. Artif. Intell. 2024, 133, 108331. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Longo, M.; Di Martino, A.; Saldarini, A.; Faranda, R.S. Exploring the Synergy of Artificial Intelligence in Energy Storage Systems for Electric Vehicles. Electronics 2024, 13, 1973. [Google Scholar] [CrossRef]
- Miraftabzadeh, S.M.; Di Martino, A.; Longo, M.; Zaninelli, D. Deep Learning in Power Systems: A Bibliometric Analysis and Future Trends. IEEE Access 2024, 12, 163172–163196. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Architecture |
|---|---|
| CNN | 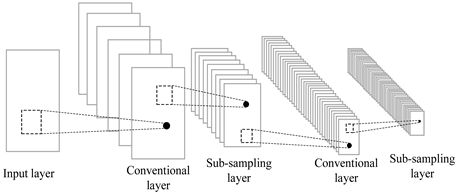 |
| RNN |  |
| DAE | 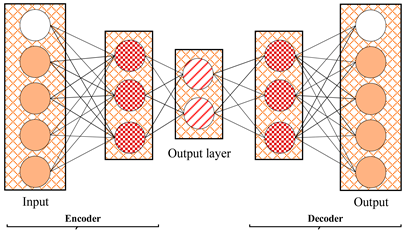 |
| DBN | 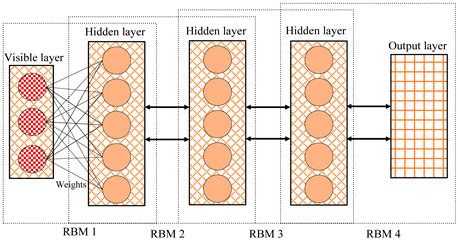 |
| LSTM | 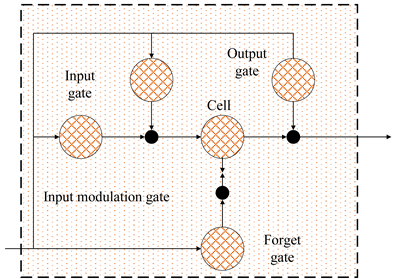 |
| Reference | AI/ML Method | Application Area | Performance Metrics | Advantages | Weaknesses |
|---|---|---|---|---|---|
| [20] | RVM, PF, SVM | Battery management | RMSE: 1.68%, accuracy: 98% | High accuracy for SOC/SOH estimation | Requires extensive preprocessing |
| [25] | FNN, RNN, RBF | Battery management | Error: RBF 2.2%; FNN: 0.7%; RNN: 0.5% | Effective across diverse conditions | RBF models show higher error rates |
| [28] | LSTM, DBN, CNN | Battery management | MSE: 0.022 for SOH | Combines data-driven and physical modeling | Complex deployment in real systems |
| [29] | XGBoost, LightGBM | Range prediction | Prediction error: [−0.8, 0.8] km | High precision with minimal error range | Requires extensive driving data |
| [33] | Federated learning, DLSTM | Charging demand prediction | Accuracy: 97.14% | Combines multiple models for robust prediction | High computational resource needs |
| [34] | Bi-LSTM, GRU | Real-time range prediction | R2: 0.99998, MSE: 0.029 km | Very high accuracy for short-term predictions | Complex feature scaling techniques |
| [36] | Linear integer programming | Optimal charging station placement | Reduced energy costs in urban areas | Optimizes EV adoption in target regions | Limited scalability for large areas |
| [40] | XGBoost, neural networks | Smart fleet charging | Mean absolute error: 126 W | Effective for dynamic charging strategies | Requires real-time data integration |
| [41] | Reinforcement learning | EV fleet optimization | Improved bidding strategy accuracy | Enhances profitability in smart energy grids | Complexity in multi-agent systems |
| [43] | LM-CNN-SVM | Object recognition and classification | Accuracy: 92.8% for classification | Handles background clutter and occlusions | Limited scalability for larger datasets |
| [46] | End-to-End CNN | Real-time AD system evaluation | Accuracy: 90.4% on Tesla Autopilot | Robust decision making in real-world tests | High training data requirements |
| [51] | DRL + MPC | Motion planning and decision making | Improved fuel efficiency metrics | Integrates predictive control for AD systems | Complexity in system integration |
| [55] | CNN-GRU | Day-ahead forecasting | MAPE: <1% | Highly precise predictions for hybrid systems | High computational demands |
| [57] | DRL with transfer learning | EV energy optimization | Convergence: improved by 70% | Efficient transfer of pre-trained models | Limited adaptability to new systems |
| [59] | RNN (LSTM, GRU) | Trajectory and delay forecasting | Effective for long prediction intervals | High effectiveness in smart city integration | Dependence on real traffic data |
| [66] | ANN | Automotive predictive maintenance | Precise component health forecasting | Reduces downtime and maintenance costs | Data-heavy approach |
| [69] | Cox PHM + M-LSTM | Battery health prediction | MAPE: 0.28%, RMSPE: 0.55% | Highly accurate RUL estimations | Complexity in multi-parameter optimization |
| [72] | Dynamic inspection scheduling | Time interval between measurements | Improves inspection efficiency | Reduces unnecessary checks | Limited to pre-defined parameters |
| [77] | XGBoost, SHAP | Real-time accident detection | Accuracy: 99%, detection rate: 79% | Highly accurate accident detection | Requires highway digitalization |
| [78] | Transformer, LSTM, Bi-LSTM | Short-term traffic flow prediction | MAE: Transformer (5.613) | Effective for capturing spatial–temporal data | High computational requirements |
| [83] | GNN, Multi-Arm Bandit (MAB) | Intelligent traffic management | Accuracy: ~97% across datasets | Dynamic refinement of traffic policies | Limited real-world testing |
| [88] | Deep Q-Learning | V2G energy optimization | Cost reduction: over 98% | Highly effective for fluctuating energy costs | Complexity in multi-scenario modeling |
| [94] | Decentralized map reduce | Charging profiles and pricing | Optimized grid stability and demand | Promotes energy sustainability | Requires advanced infrastructure |
| [93] | DDPG | Frequency regulation | Reduces frequency deviation, ACE improved | Robust optimization for grid performance | High algorithmic complexity |
| [96] | DRL (AmoD System) | Fleet rebalancing | Demand satisfaction: +14%, revenue: +12% | Effective for shared mobility optimization | Limited scalability for large fleets |
| [99] | Linear regression, LSTM | E-scooter usage prediction | Effective time-series prediction | Promotes innovation with open data | Requires extensive data preprocessing |
| [102] | MDP, RL | Fleet charging coordination | Load variance reduced: 65% | Eliminates power limit exceedances | Challenging for large-scale systems |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noor ali, K.; Hemmati, M.; Miraftabzadeh, S.M.; Mohammadi, Y.; Bayati, N. A Mini Review of the Impacts of Machine Learning on Mobility Electrifications. Energies 2024, 17, 6069. https://doi.org/10.3390/en17236069
Noor ali K, Hemmati M, Miraftabzadeh SM, Mohammadi Y, Bayati N. A Mini Review of the Impacts of Machine Learning on Mobility Electrifications. Energies. 2024; 17(23):6069. https://doi.org/10.3390/en17236069
Chicago/Turabian StyleNoor ali, Kimiya, Mohammad Hemmati, Seyed Mahdi Miraftabzadeh, Younes Mohammadi, and Navid Bayati. 2024. "A Mini Review of the Impacts of Machine Learning on Mobility Electrifications" Energies 17, no. 23: 6069. https://doi.org/10.3390/en17236069
APA StyleNoor ali, K., Hemmati, M., Miraftabzadeh, S. M., Mohammadi, Y., & Bayati, N. (2024). A Mini Review of the Impacts of Machine Learning on Mobility Electrifications. Energies, 17(23), 6069. https://doi.org/10.3390/en17236069