Abstract
This article presents a vibration signal analysis method to diagnose helicopter turboshaft engine defects such as bearing imbalance and wear. The scientific novelty of the article lies in the development of a comprehensive approach to diagnosing helicopter turboshaft engine defects based on the vibration signals amplitude and frequency characteristics integral analysis combined with a neural network for probabilistic defect detection. Unlike existing methods, the proposed approach uses the energy criterion for the vibration characteristics. It averages the assessment of unique signal processing algorithms, which ensures reliable defect classification under flight vibration conditions. The method is based on representing vibration signals as a sum of harmonic oscillations supplemented by noise components, which helps to identify deviations from typical values. The developed method includes a state function in which the amplitudes and frequency characteristics from nominal parameters estimate deviations. When the critical threshold is exceeded, the function signals possible malfunctions. A multilayer neural network is used to classify defect types, providing high classification accuracy (from 0.985 to 0.994). Computer experiments on the developed seminaturalistic modeling stand confirm that the method can detect increased vibration levels, which is the potential failure indicator. Comparative analysis shows the proposed method’s accuracy and noise resistance superiority, emphasizing the importance of introducing modern technologies to improve aircraft operation reliability and safety.
1. Introduction
The helicopter turboshaft engine (TE) vibration signals are a crucial source of diagnostic information that allows us to assess their operational status and identifying various defects, such as gas-generator and free turbine rotors imbalance, bearing wear, and other faults that reduce flight reliability and safety [1,2]. Traditional vibration diagnostics methods are limited to using local characteristics, which does not allow for the effective detection of defects against the noise background and current operating conditions’ typical random fluctuations [3,4]. The integral energy criterion use [5,6] provides a more generalized assessment of the helicopter TE operational status, smoothing out the impact of random fluctuations and accurately detecting hidden defects, which is especially important in helicopter flight operations’ highly dynamic conditions.
The neural network models used in the vibration signals diagnostics allow a modern approach implementation for the fault classification, where each neural network layer is adapted to identify key features in the amplitude–frequency spectrum [3]. Integrating neural network methods with the energy criterion makes it possible to consider the parameters’ current values and their deviations from the standard characteristics, increasing diagnostics’ accuracy and reliability. This approach allows a significant improvement in fault early detection, failure probability depreciation, and an increase in the engine’s service life. Diagnostic methods based on the vibration signals’ spectral-energy characteristics using neural network technologies are urgently required to improve helicopter aviation safety and reliability.
Most research in the helicopter TE vibration diagnostics field focuses on the spectral methods used to evaluate the vibration signal frequency content and identify the primary harmonics corresponding to the faults of various types. For example, the fast Fourier transform (FFT), used to analyze the signals’ amplitude and frequency characteristics [4,7], is a common approach to detect defects such as imbalance and resonance. However, this method has limitations when processing signals with high noise levels and random oscillations since it poorly identifies weak and nonperiodic defects often encountered in practice.
Methods based on the wavelet transform and other multiscale approaches are proposed in [8,9] to solve the sensitivity to noise problem. Wavelet analysis allows one to identify signal features on different timescales and is better adapted to studying nonstationary processes. Research [10,11] shows that combining wavelet and spectral analysis allows one to increase diagnostic accuracy, especially in the case of short signals. However, the presented methods require precise adjustment of the analysis parameters and, as a rule, are difficult to implement in real time. In addition, they do not always consider the vibrations’ energy characteristics, which can significantly reduce their effectiveness in the complex signals’ analysis when the amplitude oscillations are random.
Neural network methods have also found wide applications, in particular, multilayer neural networks that are trained to identify various patterns characteristic of helicopter TE malfunctions [12,13]. The neural networks provide flexibility and the ability to detect linear and nonlinear dependencies, which is critical for high-precision diagnostic systems. Neural networks analyze a wide range of vibration characteristics and consider numerous parameters, such as amplitude and frequency deviations, which allows them to adapt to the helicopters’ complex operating conditions [14,15]. However, their use is also associated with problems: high sensitivity to model parameters, requirements for the training dataset size, and the need for significant computing power, which can complicate their use in onboard diagnostic systems.
One of the critical gaps in existing methods is the limited consideration of the vibration signals’ integral energy characteristics [16]. The integral criteria, particularly energy criteria, will allow the helicopter TE vibration to assess the accumulated impact and identify trends preceding defects. Integral energy criteria provide signal characteristics averaging over the entire observation period, which helps to diminish the effects of random noise and local vibrations.
It is also noted that neural network approaches are rarely integrated with energy characteristics [12,14], despite their potential to improve diagnostic accuracy and robustness. In [13,14], neural networks were used to classify defects based on static signal features without considering dynamic changes in energy parameters over time. Incorporating such features improves the ability of the neural network to distinguish between fault classes, especially under low signal-to-noise conditions. It allows it to learn more general damage patterns.
Thus, further development of vibration diagnostics requires complex models combining spectral and neural network analysis advantages with energy criteria capable of integrally assessing the helicopter TE condition.
Considering the above, the research aim was formed, which consists of developing a method for diagnosing helicopter TE defects based on the integral energy criterion and neural network models, which will improve the accuracy of detecting vibration anomalies in helicopter operating conditions. The research object is the helicopter TE vibration characteristics in various operating modes, and the research subject is the methods and models for analyzing vibration signals based on integral energy criteria and neural network algorithms for diagnosing and classifying helicopter TE defects.
This article consists of the following sections: Introduction, Materials and Methods, Results, Discussions, Conclusions, and References. The Introduction substantiates the relevance of the research topics, reviews existing research in the helicopter TE vibration diagnostics field, highlights the shortcomings of the approaches, and formulates the research aim, object, and subject. The Materials and Methods section develops a method for diagnosing helicopter TE defects using the integral energy criterion and neural network models. The Results section presents the computational experimental results in determining engine failure in a helicopter flight based on the integral energy criterion. The Discussion section presents the research’s primary results, highlights the limitations, and formulates the prospects for further research. The conclusions show the research’s main findings.
2. Materials and Methods
This research presents a novel method for helicopter TE vibration diagnostics, combining vibration signal analysis, integral deviation estimates of amplitude and frequency characteristics, and neural-network-based defect detection. This approach enables high-accuracy diagnostics during flight by analyzing signal energy and leveraging machine learning to uncover hidden defects, classify their severity, and provide a comprehensive assessment of engine condition through an inclusive frequency range analysis and filtering of random fluctuations. For this, it is assumed that the engine’s specific vibration signal x(t) is measured in time and represented as harmonic oscillations set in the following form [12]:
where Ai is the amplitude of the i-th harmonic, ωi = 2·π·fi is the circular frequency of the i-th harmonic, φi is the initial phase of the i-th harmonic, and N(t) is the noise component reflecting random interference.
The following characteristics are used to analyze the signal: the vibrations’ root-mean-square value (RMS), the vibration acceleration coefficient for estimating the high-frequency components’ amplitude (Ka), and the signal power spectrum (S(f)), defined as [13]:
where (x(t)) is the Fourier transform of the signal x(t), and T is the observation period.
It is noted that the power spectrum S(f) allows the detailed analysis of the signals’ frequency composition, identifying the main harmonics and assessing the noise contribution in different frequency ranges. In this case, the Fourier transform (x(t)) of the signal x(t) is defined as follows [12]:
where X(f) is the signals’ amplitude spectrum in the frequency domain. For each harmonic component Ai·cos(ωi·t + φi), the Fourier transform will yield peaks at frequencies f = fi and f = −fi, where . The noise component N(t) adds random fluctuations in the power spectrum distributed over frequencies.
The converted signal in the power spectrum S(f) form is decomposed into frequency components according to the signal x(t) characteristics at different frequencies to determine engine defects such as imbalance or bearing wear. In this case, deviations in amplitudes and frequencies relative to standard values are determined according to the following expressions [13,14]:
where and are the current amplitude and frequency of the i-th component; and are the nominal amplitude and frequency of the i-th component.
To assess the engines’ operational status, a state function F is introduced based on the deviations’ integral assessment in amplitudes and frequency characteristics:
where and are the weighting coefficients that determine the amplitude and frequency components significance for each defect, and E is the signals’ energy assessment, defined as
The signals’ energy assessment indicates the total vibrational impact experienced by the system and reflects the vibration intensity, including harmonic and noise components. If Fcalculated exceeds the permissible threshold Fcritical, it is considered that a fault has occurred in the system.
It is known [17,18] that one of the parameters recorded on board a helicopter is the vibration velocity Vvibration, which is the body deviation amplitude function (the engine rotors’ deflection), A, from the stationary state during the helicopter TE operation Vvibration = . It is known that the helicopter TE rotor deflection magnitude (gas-generator or free turbine) with a rigidity coefficient (elasticity) K, having an imbalance (eccentricity determined by the mass center deviation magnitude from the rotor mount center) e, depends on the rotation speed ω (the helicopter TE operating mode) [19]:
In this case, the value inverse to the rigidity coefficient 1/K characterizes the rotor support flexibility, which depends, among other things, on their operational status. The expression (1) will take the following form:
In contrast to [19], using the integral criterion is more appropriate since it provides an average estimate of the time series characteristics over the entire observation interval, allowing us to obtain generalized indicators with less sensitivity to local fluctuations and noise. In contrast to the fractal dimension proposed in [19], the integral criterion does not require a complex computational process to estimate the signal structure self-similarity. It is more resistant to the influence of random fluctuations, which is especially important when analyzing complex or noisy data.
Based on the above, the signal feature vector X = () is the initial diagnostic dataset, which determines the defect probability P(Y = k | X) for each k-th class of malfunction. For helicopter TE defects diagnostics based on the vibration signal feature vector X = (), it is proposed to use a multilayer neural network (Figure 1) for classification, which will output the defects’ various types of occurrence probabilities P(Y = k | X) for each k-th class of malfunction.
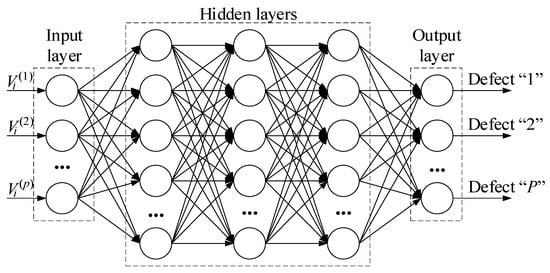
Figure 1.
Structural diagram of the proposed neural network for the helicopter TE defects diagnostics based on the developed method.
The proposed neural network input layer neurons (see Figure 1) receive a diagnostic dataset in the feature vector X form with a dimension equal to the feature number. In the first hidden layer, nonlinear dependencies between features are researched to identify defect features. In the second hidden layer, the information on vibration features representation is enhanced and specific patterns associated with fault classes are determined. The second hidden layer receives higher-level features from the first layer and improves their representation, allowing for better discrimination between fault classes. The third hidden layer provides additional feature compression and elimination of redundant information. Based on [20,21,22], 64 neurons are adopted in the first hidden layer, 32 neurons in the second hidden layer, and 16 neurons in the third hidden layer, and the neuron activation function is SmoothReLU, developed in [23]. By avoiding the sharp changes in gradient, the SmoothReLU activation function developed in [23] can speed up the neural network training, keeping the ReLU advantages for positive values and providing smoothness for negative values, contributing to more stable and faster convergence. The neural networks’ output layer provides a belonging probabilities prediction to each k-th fault class. The neuron number in the output layer corresponds to the defect class k number. For multiclass classification, the Softmax activation function is adopted. The probability vector P(Y = k | X) for each k-th class, where the probabilities sum over all classes is 1, is defined as
where k is the linear combination result from the previous layer for the k-th class. Table 1 shows the developed neural network training algorithm.

Table 1.
The developed neural network training algorithm (according to [20,21]).
Thus, the scientific novelty is developing a comprehensive approach to helicopter TE diagnostics defects based on the amplitude and frequency characteristics of the vibration signals. These are integrally analyzed with a neural network model for the defect presence probabilistic assessment. Unlike existing methods, for example, [19], the proposed approach uses an energy criterion to evaluate characteristics and specific signal processing algorithms, which are all allowed.
3. Results
Ten different flights of the Mi-8MTV helicopter [24,25] were analyzed to conduct the computational experiment, and, accordingly, the vibration state of twenty TV3-117 engines [26,27] included in the helicopter power plant, obtained from the processing results of the flight data recorded by the BUR-1-2 onboard device [23,24,28]. Figure 2 shows the changes in signalgrams on the left (black curve in Figure 2) and right (blue curve in Figure 2) TV3-117 engine vibration velocity during the flight. It is noted that the TV3-117 engines’ vibration velocity signalgrams were provided by the authors’ official request to the Ministry of Internal Affairs of Ukraine and are intended for the implementation of the project “Theoretical and Applied Aspects of the Development of the Aviation Sphere”, officially registered in Ukraine, No. 0123U104884.
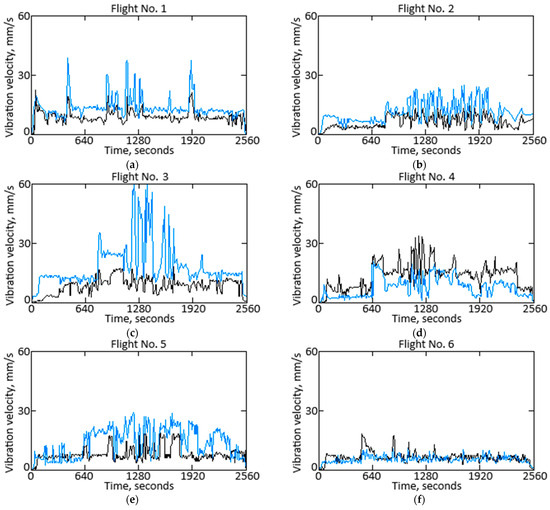
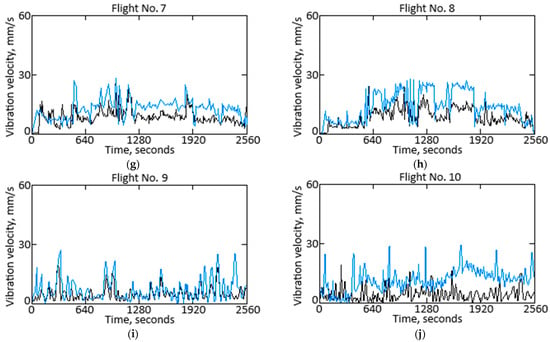
Figure 2.
Diagrams of the TV3-117 engines’ vibration velocity signalgrams obtained as a result of the Mi-8MTV helicopter flight: (a) Flight No. 1: , . (b) Flight No. 2: , . (c) Flight No. 3: , . (d) Flight No. 4: , . (e) Flight No. 5: , . (f) Flight No. 6: , . (g) Flight No. 7: , . (h) Flight No. 8: , . (i) Flight No. 9: , . (j) Flight No. 10: , .
The oscillograms provided contain information on the change in engine vibration velocities over 2560 s of helicopter flight. As per [23,24], 256 vibration velocity values were selected, sufficient to state a normal distribution and corresponding to a sampling step of 10 s. Based on the chosen vibration velocity values, the control error and control error rate values were obtained (Table 2), constituting the training sample.
Table 2.
The training dataset fragment.
In this research, selecting 256 vibration velocity samples [23,24], corresponding to a 10 s sampling interval, aims to capture significant trends in vibration changes over the helicopter flight duration rather than high-frequency fluctuations [29]. While higher-frequency data might provide more detailed insights into transient or high-speed events, the focus here is on identifying longer-term, consistent changes in vibration that reflect underlying mechanical issues such as imbalance or wear [30,31]. Therefore, the chosen sampling approach effectively captures the system’s general state without overwhelming the analysis with rapid variations that may include noise or short-term oscillations.
It is noted that the training datasets homogeneity analysis is a key stage of input data preprocessing [23,24] for neural network analysis of vibration characteristics and diagnostics of helicopter TE defects, as heterogeneous data can significantly reduce the classification and predicting accuracy quality. In the significant differences in the vibration signal characteristics (e.g., associated with different flight modes, loads, and changes in operating conditions), the neural network can incorrectly interpret patterns and erroneously diagnose defects or miss important signs of malfunctions. Homogeneous samples allow the neural network to distinguish between normal and abnormal states better, improving the models’ ability to detect hidden defects. In addition, the training data homogeneity helps to reduce overfitting and ensures more stable and reliable operation of the diagnostic system in various operating conditions.
The homogeneity of the training sample was assessed using the Fisher–Pearson [32,33,34,35] and Fisher–Snedecor [36,37,38] criteria and is presented in Table 3.
Table 3.
The training dataset homogeneity evaluates results for the Vi parameter using the Fisher–Pearson and Fisher–Snedecor criteria.
Table 3 shows that the training sample (Table 2) is homogeneous for all studied flight cases No. 1–No. 10, as the calculated values of the Fisher–Pearson and Fisher–Snedecor criteria did not exceed the critical value.
The computational experiment was conducted on the developed seminaturalistic modeling stand (Figure 3), which is a modification of a similar stand developed in [24]. The developed seminaturalistic modeling stand is designed to simulate the helicopter TE operating parameters in real time and to reproduce the helicopter TE operating modes in the altitudes and flight speed ranges. In addition, the seminaturalistic modeling stand ensures interaction with upper-level systems through data exchange channels, testing the automatic control systems’ unit operation and other tasks.
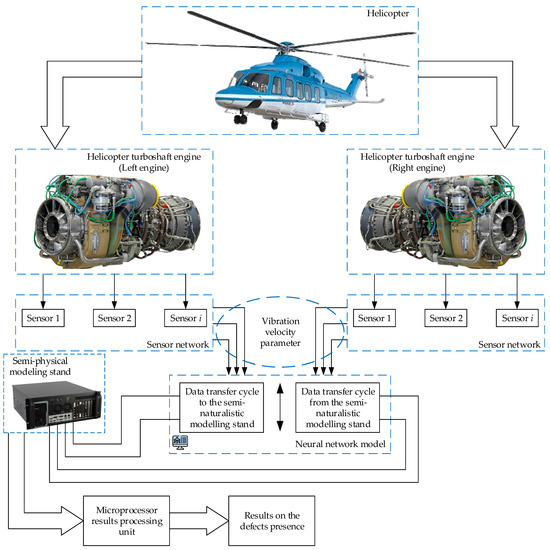
Figure 3.
Scheme showing the interaction between the helicopter turboshaft engine model and the semiphysical simulation stand.
The developed seminaturalistic modeling stand, intended for real-time helicopter TE operation parameters modeling, is also used to test and adapt vibration diagnostics neural network methods. The helicopter TE vibration diagnostics using neural networks require accurate reproduction of engine operating modes, including altitude and speed flight modes, achieved by seminaturalistic modeling. In seminaturalistic modeling conditions, it is possible to integrate a neural network algorithm of vibration diagnostics for analyzing vibration signals, which allows the diagnosis and prediction of faults in actual operating conditions. Interaction with upper-level systems and testing the automatic control systems’ unit operation can also be used to transmit diagnostic data and their subsequent processing by the neural network. It ensures increased accuracy and reliability of the helicopter TE operational status diagnostics.
The developed seminaturalistic modeling stand is implemented in the MATLAB software environment 2014b, which allows real-time modeling of the helicopter TE operating parameters, supporting testing and adaptation of neural network vibration diagnostics methods. It was found that the developed stand reproduces various engine operating modes with 99% accuracy based on [24], including altitude–speed conditions, which allows realistic vibration analysis. Due to the neural network algorithms, the stand allows fault diagnostics and predictive analysis in conditions close to operational ones.
The developed seminaturalistic modeling stand reproduced the helicopters’ flight conditions of No. 1–No. 10, in which the developed neural network method of vibration diagnostics was used for helicopter TE malfunctions operational analysis and prediction. By [19], a signal regarding increased vibration was generated when the velocity reached 50 mm/s. From the presented signalgrams, it is clear that in Flight No. 3, the maximum vibration velocity of the right engine reached 60 mm/s, which indicates that the helicopter TE malfunctioned due to increased vibration. The other engines were in good condition, although their vibration levels differed significantly. The tolerance control method does not allow the analysis of the vibration velocity trend (if any) and the prediction of changes in this parameter. The vibration velocity dependence on the gas-generator rotor speed Vvibration = f(nTC) for all helicopter TE is shown in Figure 4, where the “black curve” denotes the left engine, and the “blue curve” denotes the right engine.
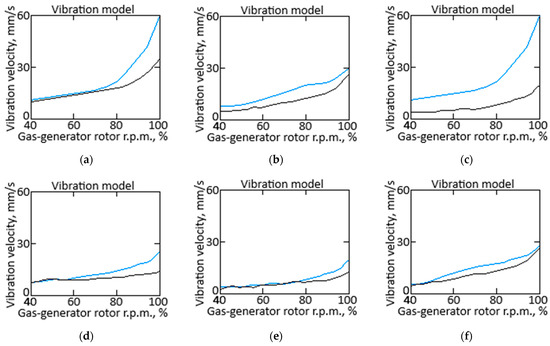
Figure 4.
Dependences of the gas-generator rotor speed vibration velocity: (a) Flight No. 1; (b) Flight No. 2; (c) Flight No. 3; (d) Flight No. 4; (e) Flight No. 5; (f) Flight No. 6; (g) Flight No. 7; (h) Flight No. 8; (i) Flight No. 9; (j) Flight No. 10.
The results of processing the vibration velocity values by the developed neural network for all helicopter TE for all the studied flight cases No. 1–No. 10 are presented in Table 4. The developed neural network (Figure 1), by determining the integral assessment (7), identified the right engine vibration level excess in Flight No. 3 (the maximum permissible vibration velocity is 50 mm/s). At the same time, the neural network performed a preliminary assessment of each engine’s operational status, which indicates a slightly increased vibration level of the right engine in Flight No. 1, the right in Flight No. 4, and the left in Flight No. 4 compared to other helicopter TE (Vmax = 35 and 33, respectively).
Table 4.
The integral energy criterion calculation results.
To determine the vibration velocity time series stability, we used the Hurst exponent [39,40,41], which uses time series analysis to assess their long-term dependence and stability. The Hurst exponent is calculated using the residual analysis method according to the following expression [39,40]:
where
- The sharp range to the standard deviation is calculated as follows:
- The maximum and minimum deviations are calculated as follows:
- The standard deviation is calculated as follows:
- The deviation from the mean is calculated as follows:
- The vibration velocity time series average value is calculated as follows:
The calculated H > 0.5 indicates the systems’ stable behavior, which may be a sign of the trend, and H < 0.5 signals randomness and instability in the system. At H < 0.5, the vibration velocity time series tends to return to the mean value (slow stability). At H = 0.5, the vibration velocity time series is random (Brownian motion). At H > 0.5, the vibration velocity time series tends to become stable or “trend” (long-term dependence).
The analysis results (Table 4) show high prediction accuracy, which reaches values from 0.985 to 0.994 for different combinations of parameters and flight numbers. The highest accuracy was recorded for the left engine in the 10th flight, amounting to 0.993 at H = 0.893 and F = 0.959. At the same time, the most significant loss was 0.572% for the right engine in the 5th flight, which is the maximum value in this dataset. The general trend in losses fluctuates from 0.509 to 0.572%, demonstrating a relatively low level of losses and confirming the calculations’ reliability for vibration control and engine operation safety. It is also evident from Table 4 that the Hurst exponent for the vibration velocity parameter lies within the range 0.5 < H < 1. Consequently, it can be concluded that it is stable. That is, if there is an upward trend in vibration velocity, this trend will continue.
In this case, the engines’ operational status final assessment based on the vibration velocity parameter is made according to the proposed integral F evaluation. The integral assessments’ F obtained values indicate an apparent failure of the right engine in Flight No. 3. According to [19], two engines (the left one in Flight No. 5 and the right one in Flight No. 7) have integral assessment F values equal to 0.960. Let us take this value as the threshold above which the vibration velocity is considered elevated. Thus, we can conclude that there are possible incipient failures of the right engine in Flight No. 1 and the left one in Flight No. 4 due to the excess of the integral assessment F values relative to its threshold value (Figure 5). The calculation results presented in Figure 5 correlate with the dependencies in Figure 4, indicating that the integral assessment F correctly reflects the engines’ vibration state and can be used to assess their operational status based on the vibration velocity parameter.
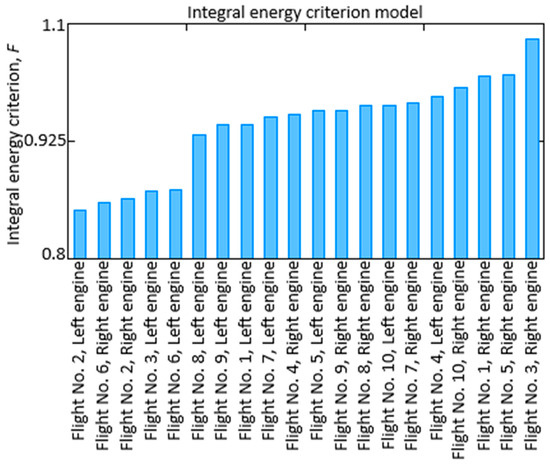
Figure 5.
Diagram of integral assessment values for all helicopter turboshaft engines in various flight modes.
According to [5,6,16,19], the state function F is linked to various failure modes by interpreting the deviation values ΔAi and Δfi in relation (7) to specific operational scenarios of the engine. Each failure mode, such as imbalance, bearing wear, or misalignment, typically produces distinctive amplitude and frequency deviation patterns, which are detectable by analyzing the F values (Table 5).
Table 5.
The relationship of the integral energy criterion with the helicopter turboshaft engines’ failures of different types.
4. Discussion
In this research, an engine analyzing vibration signals method is developed to diagnose defects such as imbalance or wear of bearings. It is assumed that the engines’ vibration signal x(t) is measured in time and presented in the form (1) as the sum of the harmonic oscillations, considering the amplitudes, frequencies and phases, and the noise component describing random interference. To analyze the signal, key characteristics are determined, including the vibration value root mean square (RMS) (1), the vibration acceleration coefficient for estimating the amplitude of high-frequency components Ka (2), and the signal power spectrum S(f) (3), calculated through the Fourier transform. The power spectrum S(f) allows us to research signal frequency content, identify the primary harmonics, and estimate the noise component in different frequency ranges. Based on the harmonic components’ amplitudes and frequency characteristics, deviations from the standard values are determined, indicating possible engine malfunctions.
The developed method introduces the state function F in the form (7), which integrally evaluates the deviations of the amplitudes and frequency characteristics relative to the nominal parameters. If the value of the function F exceeds the critical threshold Fcritical, it is considered that a fault has occurred in the system. To diagnose defects based on the vibration signals’ features X = (), which is a diagnostic dataset, a multilayer neural network is used (see Figure 1), which the defects types classify, providing probabilities P(Y = k | X) for each class of fault.
The developed neural network (see Figure 1) uses an input layer to receive a diagnostic dataset in the feature vector X form, corresponding the dimension to the feature number. The first hidden layer studies nonlinear dependencies between features, and the second enhances the information representation about vibration features and identifies specific patterns for fault classes. The third layer additionally compresses features, eliminating redundant information. In the output layer with the Softmax activation function, the network produces a probability vector P(Y = k | X) for each defect class, providing multiclass classification. A neural network training algorithm was developed (see Table 1), consisting of parameter initialization, forward pass, loss function calculation, backward pass, and performance evaluation. A loss function was applied, represented as cross-entropy, minimizing the difference between the predicted probabilities and actual fault classes.
A computational experiment was conducted, during which ten different flights of the Mi-8MTV helicopter and the corresponding vibration state of twenty TV3-117 engines were analyzed, and data were obtained from the BUR-1-2 onboard device (see Figure 2). The signalgrams of changes in engine vibration speeds, presented in the diagrams, contain information on changes over 2560 s of flight, which allows the identification of the features of their operation.
The computational experiment was conducted on the developed seminaturalistic modeling stand (see Figure 3), modified for real-time helicopter TE operation parameter modeling. The developed seminaturalistic modeling stand provides reproduction of operating modes, including altitude and speed parameters, and allows the integration of neural network methods for analyzing vibration signals. The data processing results of the neural network showed high prediction accuracy (from 0.985 to 0.994), revealing increased vibration levels in the right engine in Flight No. 3 and other engines on different flights (see Table 4). Based on the integral assessment, the helicopter TE operational status final assessment made it possible to identify possible incipient failures. It confirmed the calculations’ reliability for the engine operation safety vibration control.
The neural networks used in this method have the ability to analyze complex nonlinear dependencies and multidimensional features of vibration signals that may remain unnoticed when using simple indices. The neural network effectively identifies hidden patterns corresponding to defects of different classes (see Table 4) and, by combining the amplitudes’ assessment and vibration frequency characteristics, increases the accuracy of diagnostics due to a deep analysis of vibration features and a reduction in the influence of random noise. Due to this, the neural network approach provides more accurate and early detection of defects compared to methods based on simple statistical indicators.
A comparative analysis (Table 6) of the developed method for helicopter TE operational status assessment based on the vibration velocity parameter was performed with two closest analogues: 1 is the method for the helicopter TE operational status assessment based on the fractal vibration level [19]; 2 is the method based on the time–frequency analysis of vibration signals using the helicopter TE malfunctions’ empirical mode decomposition and extracting signs [16]. The developed method has several advantages over the closest analogues under research. Unlike the technique based on the fractal vibration level [19], the integral criterion provides the estimated average of the signal characteristics, reducing sensitivity to local noise and random fluctuations. Compared to the time–frequency analysis using empirical mode decomposition, the developed method details the harmonic components contribution, which improves defect detection and reduces computational costs for the processing of the vibration signals spectral characteristics. Table 5 shows the results of a comparative analysis for the following parameters: root mean square vibration value (RMS), vibration acceleration coefficient for the amplitude of the high-frequency component (Ka), and signals’ energy assessment (E).
Table 6.
The comparative analysis results.
The developed method demonstrates superiority over the closest analogues in key diagnostic parameters. The RMS value of 1.22, more significant than that of the fractal method (1.15) and the time–frequency method (1.18), indicates a more accurate measurement of the total vibration energy. The vibration acceleration coefficient (Ka) was 1.5, reflecting better resistance to high-frequency noise than other methods, where Ka reached 1.8 and 1.7, respectively. The developed method significantly outperforms alternative approaches regarding the signal energy evaluation (E) parameter, reaching a value of 1.5 × 103, compared to 1.3 × 103 for the fractal method and 1.4 × 103 for the time–frequency analysis. This advantage indicates the developed method’s high efficiency in using the vibration signal’s total energy for diagnostics.
In this research, certain limitations should be considered despite the successful development of a vibration signal analysis method for the helicopter TE defect diagnosis. The developed method focuses on identifying only certain defects, such as imbalance and bearing wear, which may limit its application in diagnosing other faults not manifested through the specified vibration parameters. To improve the reliability of diagnosis, it is necessary to consider the influence of external factors that can be affected by vibration signals, such as temperature conditions, environmental conditions, and plant characteristics. The data-limited sample used to train the neural network may also affect the accuracy of fault classification and prediction, especially in cases with insufficient data for rare defects. Expanding the training database and integrating additional analysis methods is advisable in future research, improving the proposed method’s adaptability and versatility in the broader range of operating conditions and defect types.
There is also a performance evaluation problem on a seminaturalistic modeling stand, which consists of the need to accurately reproduce the engines’ operating modes, which requires a high degree of accuracy in modeling various parameters, such as altitude, speed, and load. Incorrect calibration or test conditions’ limited variability can lead to results distortion and a decrease in the estimate’s reliability, complicating the technical systems’ correct interpretation. In addition, the neural network methods for vibration signal analysis integration require sufficient computing power and optimization of algorithms, which can become an additional limiting factor in the effective performance monitoring implementation of the seminaturalistic modeling stand.
To process 256 values (see Table 2) to the base of, for example, 2 s with complex input data, approximately 3000 multiplications of real operands and 5500 additions of real operands are required; for 1024 values to the base of 2 s, approximately 16,000 multiplications and 28,500 additions are required. In the developed stand of seminaturalistic modeling, the sensors’ polling time is 10 μs, which gives a polling frequency of 100 kHz. The developed method implementation performance evaluation on the seminaturalistic modeling stand is carried out using the following expression:
where NMAC is the multiply-accumulate operations number, s−1; Nmultiply is the multiplication number required to calculate the transformation; fcount is the input data frequency, Hz; Npoint is the transformation size.
The Intel Neural Compute Stick 2, utilizing the Movidius Myriad X VPU, achieves remarkable processing capabilities, boasting over 4 trillion operations per second. Its 16 programmable vector processing cores facilitate this elevated throughput, specifically engineered for deep learning applications and computer vision tasks. Such high efficiency positions it as an optimal choice for edge artificial intelligence solutions, allowing it to manage substantial computational workloads adeptly.
Thus, to efficiently process data in large amounts, as demonstrated in the performance calculations on the seminaturalistic modeling stand, using the Intel Neural Compute Stick 2 capabilities provides the required performance to perform complex operations in real time.
5. Conclusions
In this research, a vibration signal analysis method was developed to diagnose helicopter turboshaft engine defects, such as bearing imbalance and wear. In the developed method, vibration signals are presented as a sum of harmonic oscillations supplemented by a noise component, which allows effective deviation detection from typical values. The signals’ main characteristics, including the root-mean-square value and power spectrum, are used to identify anomalies and potential faults.
The developed method includes a state function that integrally estimates deviations from nominal parameters. The function signals the fault’s occurrence if the critical threshold is exceeded. A developed multilayer neural network is used to classify defect types, which studies the relations between vibration features and provides probabilities for faults in different classes. The experiments showed high classification accuracy (from 0.985 to 0.994), confirming the proposed approach’s effectiveness.
A computer experiment conducted on the developed seminaturalistic modeling stand demonstrated that the method allows the detection of elevated vibration levels, which serves as the possible failure indicator. The obtained data on engine vibration states, collected during flights, not only allow the carrying out of diagnostics but also provide warnings about potential problems in engine operation, which significantly increases helicopter operation safety.
A comparative analysis of the proposed method with similar approaches showed its superiority in measurement accuracy and noise resistance. The developed method provides a more detailed assessment of vibration energy and shows high efficiency in diagnosing the operational status of helicopter turboshaft engines. It emphasizes the importance of introducing modern data analysis and processing technologies to improve aviation equipment reliability and safety.
Thus, the developed method for analyzing vibration signals in helicopter turboshaft engines has several key advantages. The developed method application assesses the engine operating condition with an accuracy of more than 99% due to the harmonic components’ complex analysis integration and reduced sensitivity to noise, which leads to better detection of faults, primarily imbalances and bearing wear. The high accuracy of neural network prediction, demonstrated during actual tests on Mi-8MTV helicopters, increases the efficiency of early diagnostics of defects, which significantly contributes to the safety and efficiency of engine performance monitoring.
Author Contributions
Conceptualization, S.V.; methodology, S.V.; software, M.B., D.B., J.C. and V.V.; validation, M.B., D.B., E.K. and V.V.; formal analysis, S.V.; investigation, D.B., E.K. and M.R.; resources, M.B., J.C. and D.B.; data curation, D.B., E.K., V.V. and M.R.; writing—original draft preparation, S.V.; writing—review and editing, D.B., E.K. and M.R.; visualization, M.B., D.B., J.C., V.V. and M.R.; supervision, E.K. and M.R.; project administration, E.K. and M.R.; funding acquisition, M.B. and D.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Acknowledgments
This research was supported by the Ministry of Internal Affairs of Ukraine as “Theoretical and applied aspects of the aviation sphere development” under Project No. 0123U104884.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- de Voogt, A.; Nero, K. Technical Failures in Helicopters: Non-Powerplant-Related Accidents. Safety 2023, 9, 10. [Google Scholar] [CrossRef]
- de Voogt, A.; St. Amour, E. Safety of Twin-Engine Helicopters: Risks and Operational Specificity. Saf. Sci. 2021, 136, 105169. [Google Scholar] [CrossRef]
- Rabcan, J.; Levashenko, V.; Zaitseva, E.; Kvassay, M.; Subbotin, S. Non-Destructive Diagnostic of Aircraft Engine Blades by Fuzzy Decision Tree. Eng. Struct. 2019, 197, 109396. [Google Scholar] [CrossRef]
- Kim, S.; Im, J.H.; Kim, M.; Kim, J.; Kim, Y.I. Diagnostics Using a Physics-Based Engine Model in Aero Gas Turbine Engine Verification Tests. Aerosp. Sci. Technol. 2023, 133, 108102. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, J. Atomistic Potentials Based Energy Flux Integral Criterion for Dynamic Adiabatic Shear Banding. J. Mech. Phys. Solids 2015, 75, 45–57. [Google Scholar] [CrossRef]
- Das, S.; Dutta, R.; De, S.; De, S. Review of Multi-Criteria Decision-Making for Sustainable Decentralized Hybrid Energy Systems. Renew. Sustain. Energy Rev. 2024, 202, 114676. [Google Scholar] [CrossRef]
- Madhavan, S.; Jain, R.; Sujatha, C.; Sekhar, A.S. Vibration Based Damage Detection of Rotor Blades in a Gas Turbine Engine. Eng. Fail. Anal. 2014, 46, 26–39. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, M.; Ooi, K.T.; Zhang, T. Incipient Instability Real-Time Warning via Adaptive Wavelet Synchrosqueezed Transform: Onboard Applications from Compressors to Gas Turbine Engines. Energy 2024, 308, 132925. [Google Scholar] [CrossRef]
- Guo, W.; Qi, B.; Ren, X.; Chen, H.; Chen, X. Vision-Based Closed-Loop Robotic Fine Grinding of Aeroengine Turbine Seals Utilising Gabor Wavelet Transform. Mech. Syst. Signal Process. 2024, 220, 111632. [Google Scholar] [CrossRef]
- Chmielowiec, A. Algorithm for error-free determination of the variance of all contiguous subsequences and fixed-length contiguous subsequences for a sequence of industrial measurement data. Comput. Stat. 2021, 36, 2813–2840. [Google Scholar] [CrossRef]
- Kalyani, S.; Venkata Rao, K.; Mary Sowjanya, A. A TimeImageNet Sequence Learning for Remaining Useful Life Estimation of Turbofan Engine in Aircraft Systems. Struct. Durab. Health Monit. 2021, 15, 317–334. [Google Scholar] [CrossRef]
- Szrama, S.; Lodygowski, T. Aircraft Engine Remaining Useful Life Prediction Using Neural Networks and Real-Life Engine Operational Data. Adv. Eng. Softw. 2024, 192, 103645. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Zhang, H. Research on Adaptive Feedforward Control Method for Tiltrotor Aircraft/Turboshaft Engine System Based on Radial Basis Function Neural Network. Aerosp. Sci. Technol. 2024, 150, 109180. [Google Scholar] [CrossRef]
- Li, B.; Zhao, Y.-P.; Chen, Y.-B. Unilateral Alignment Transfer Neural Network for Fault Diagnosis of Aircraft Engine. Aerosp. Sci. Technol. 2021, 118, 107031. [Google Scholar] [CrossRef]
- Boujamza, A.; Elhaq, S.L. Optimising Remaining Useful Life Predictions for Aircraft Engines: A Dilated Recurrent Neural Network Approach. IFAC-PapersOnLine 2024, 58, 811–816. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, K.; Zhao, P. A Feature Extraction Method for Aircraft Engine Rotor Vibration Diagnosis. Procedia Eng. 2015, 99, 1576–1581. [Google Scholar] [CrossRef][Green Version]
- Zhu, G.; Zeng, X.; Gao, Z.; Gong, Z.; Duangmu, W.; Zeng, Y.; Lu, C. Study on Vibration Stability of Aircraft Engine Blades Polished by Robot Controlled Pneumatic Grinding Wheel. J. Manuf. Process. 2023, 99, 636–651. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, Y.; Liu, Y.; Wang, Y.; Li, C.; Sun, Z.; Xu, H.; Shao, H.; Zhang, D.; Zou, Q.; et al. Advances in Resin Matrix Composite Fan Blades for Aircraft Engines: A Review. Thin-Walled Struct. 2024, 202, 112058. [Google Scholar] [CrossRef]
- Legkonogikh, D.S.; Moskaev, V.A. Technical condition assessment of aircraft gas turbine engines based on fractal analysis of the vibration level. Bull. USATU 2021, 25, 41–49. [Google Scholar]
- Vladov, S.; Shmelov, Y.; Yakovliev, R. Modified Searchless Method for Identification of Helicopters Turboshaft Engines at Flight Modes Using Neural Networks. In Proceedings of the 2022 IEEE 3rd KhPI Week on Advanced Technology, Kharkiv, Ukraine, 3–7 October 2022; pp. 257–262. [Google Scholar] [CrossRef]
- Vladov, S.; Shmelov, Y.; Yakovliev, R.; Petchenko, M. Modified Neural Network Fault-Tolerant Closed Onboard Helicopters Turboshaft Engines Automatic Control System. CEUR Workshop Proc. 2023, 3387, 160–179. Available online: https://ceur-ws.org/Vol-3387/paper13.pdf (accessed on 19 October 2024).
- Wang, Y.; Zheng, Q.; Xu, Z.; Zhang, H. A Novel Control Method for Turboshaft Engine with Variable Rotor Speed Based on the Ngdot Estimator through LQG/LTR and Rotor Predicted Torque Feedforward. Chin. J. Aeronaut. 2020, 33, 1867–1876. [Google Scholar] [CrossRef]
- Vladov, S.; Scislo, L.; Sokurenko, V.; Muzychuk, O.; Vysotska, V.; Osadchy, S.; Sachenko, A. Neural Network Signal Integration from Thermogas-Dynamic Parameter Sensors for Helicopters Turboshaft Engines at Flight Operation Conditions. Sensors 2024, 24, 4246. [Google Scholar] [CrossRef] [PubMed]
- Vladov, S.; Sachenko, A.; Sokurenko, V.; Muzychuk, O.; Vysotska, V. Helicopters Turboshaft Engines Neural Network Modeling under Sensor Failure. J. Sens. Actuator Netw. 2024, 13, 66. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, J.; Liu, Z.; Li, H.-X.; Philip Chen, C.L. Event-Triggered Adaptive Neural Fault-Tolerant Control for a 2-DOF Helicopter System with Prescribed Performance. Automatica 2024, 162, 111511. [Google Scholar] [CrossRef]
- Catana, R.M.; Dediu, G. Analytical Calculation Model of the TV3-117 Turboshaft Working Regimes Based on Experimental Data. Appl. Sci. 2023, 13, 10720. [Google Scholar] [CrossRef]
- Gebrehiwet, L.; Nigussei, Y.; Teklehaymanot, T. A Review-Differentiating TV2 and TV3 Series Turbo Shaft Engines. Int. J. Res. Publ. Rev. 2022, 3, 1822–1838. [Google Scholar] [CrossRef]
- Vladov, S.; Yakovliev, R.; Vysotska, V.; Nazarkevych, M.; Lytvyn, V. The Method of Restoring Lost Information from Sensors Based on Auto-Associative Neural Networks. Appl. Syst. Innov. 2024, 7, 53. [Google Scholar] [CrossRef]
- Gao, T.; Yuan, S.-M.; Liu, Y.-Q.; Cao, S.-Q.; Yang, S.-P. Paroxysmal Impulse Vibration Analysis of an Aero-Engine Dual-Rotor System with a Defective Inner Ring for the Inter-Shaft Bearing. Commun. Nonlinear Sci. Numer. Simul. 2024, 131, 107864. [Google Scholar] [CrossRef]
- Wu, Z.; Hao, L.; Zhao, W.; Ma, Y.; Bai, S.; Zhao, Q. Modeling and Vibration Analysis of an Aero-Engine Dual-Rotor-Support-Casing System with Inter-Shaft Rub-Impact. Int. J. Nonlinear Mech. 2024, 165, 104757. [Google Scholar] [CrossRef]
- Mir-Haidari, S.E.; Behdinan, K. On the Vibration Transfer Path Analysis of Aero-Engines Using Bond Graph Theory. Aerosp. Sci. Technol. 2019, 95, 105516. [Google Scholar] [CrossRef]
- Pasieka, M.; Grzesik, N.; Kuźma, K. Simulation modeling of fuzzy logic controller for aircraft engines. Int. J. Comput. 2017, 16, 27–33. [Google Scholar] [CrossRef]
- Stefanovic, C.M.; Armada, A.G.; Costa-Perez, X. Second Order Statistics of -Fisher-Snedecor Distribution and Their Application to Burst Error Rate Analysis of Multi-Hop Communications. IEEE Open J. Commun. Soc. 2022, 3, 2407–2424. [Google Scholar] [CrossRef]
- Cosenza, P.; Fauchille, A.-L.; Prêt, D.; Hedan, S.; Giraud, A. Statistical Representative Elementary Area of Shale Inferred by Micromechanics. Int. J. Eng. Sci. 2019, 142, 53–73. [Google Scholar] [CrossRef]
- Panic, S.; Petrovic, V.; Draskovic, S.; Kontrec, N.; Milojevic, S. Performance analysis of hybrid fso/rf communication system with receive diversity in the presence of chi-square/gamma turbulence and Rician fading. Bull. D. Serikbayev EKTU 2023, 4, 304–312. [Google Scholar] [CrossRef]
- Benaceur, A.; Verfürth, B. Statistical Variational Data Assimilation. Comput. Methods Appl. Mech. Eng. 2024, 432, 117402. [Google Scholar] [CrossRef]
- Rusyn, B.; Lutsyk, O.; Kosarevych, R.; Kapshii, O.; Karpin, O.; Maksymyuk, T.; Gazda, J. Rethinking Deep CNN Training: A Novel Approach for Quality-Aware Dataset Optimization. IEEE Access 2024, 12, 137427–137438. [Google Scholar] [CrossRef]
- Kovtun, V.; Altameem, T.; Al-Maitah, M.; Kempa, W. Entropy-Metric Estimation of the Small Data Models with Stochastic Parameters. Heliyon 2024, 10, e24708. [Google Scholar] [CrossRef] [PubMed]
- Khosroshahi, M.; Poshtan, J.; Alipouri, Y. An Alternative Method for Estimating Hurst Exponent of Control Signals Based on System Dynamics. J. Process Control 2023, 132, 103108. [Google Scholar] [CrossRef]
- Hu, Z.; Kashyap, E.; Tyshchenko, O.K. GEOCLUS: A Fuzzy-Based Learning Algorithm for Clustering Expression Datasets. Lect. Notes Data Eng. Commun. Technol. 2022, 134, 337–349. [Google Scholar] [CrossRef]
- Marin-Lopez, A.; Martínez-Cadena, J.A.; Martinez-Martinez, F.; Alvarez-Ramirez, J. Surrogate Multivariate Hurst Exponent Analysis of Gait Dynamics. Chaos Solitons Fractals 2023, 172, 113605. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).