
Precision Control for Room Temperature of Variable Air Volume Air-Conditioning Systems with Large Input Delay

Abstract
1. Introduction
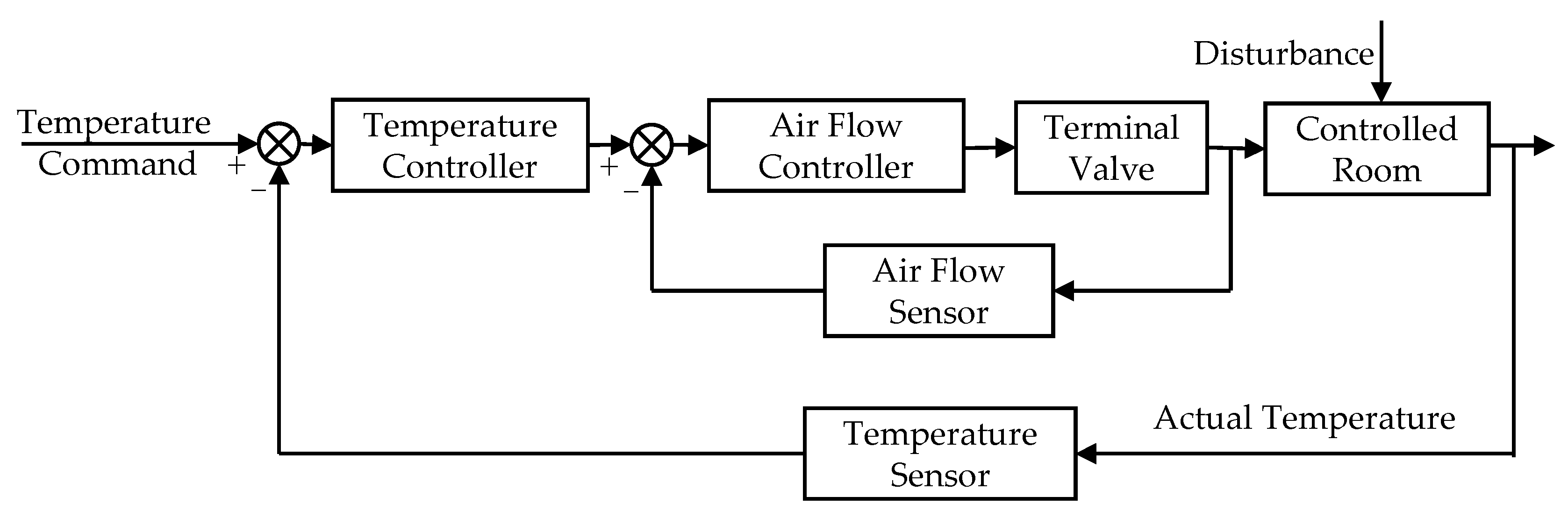
2. System Modeling
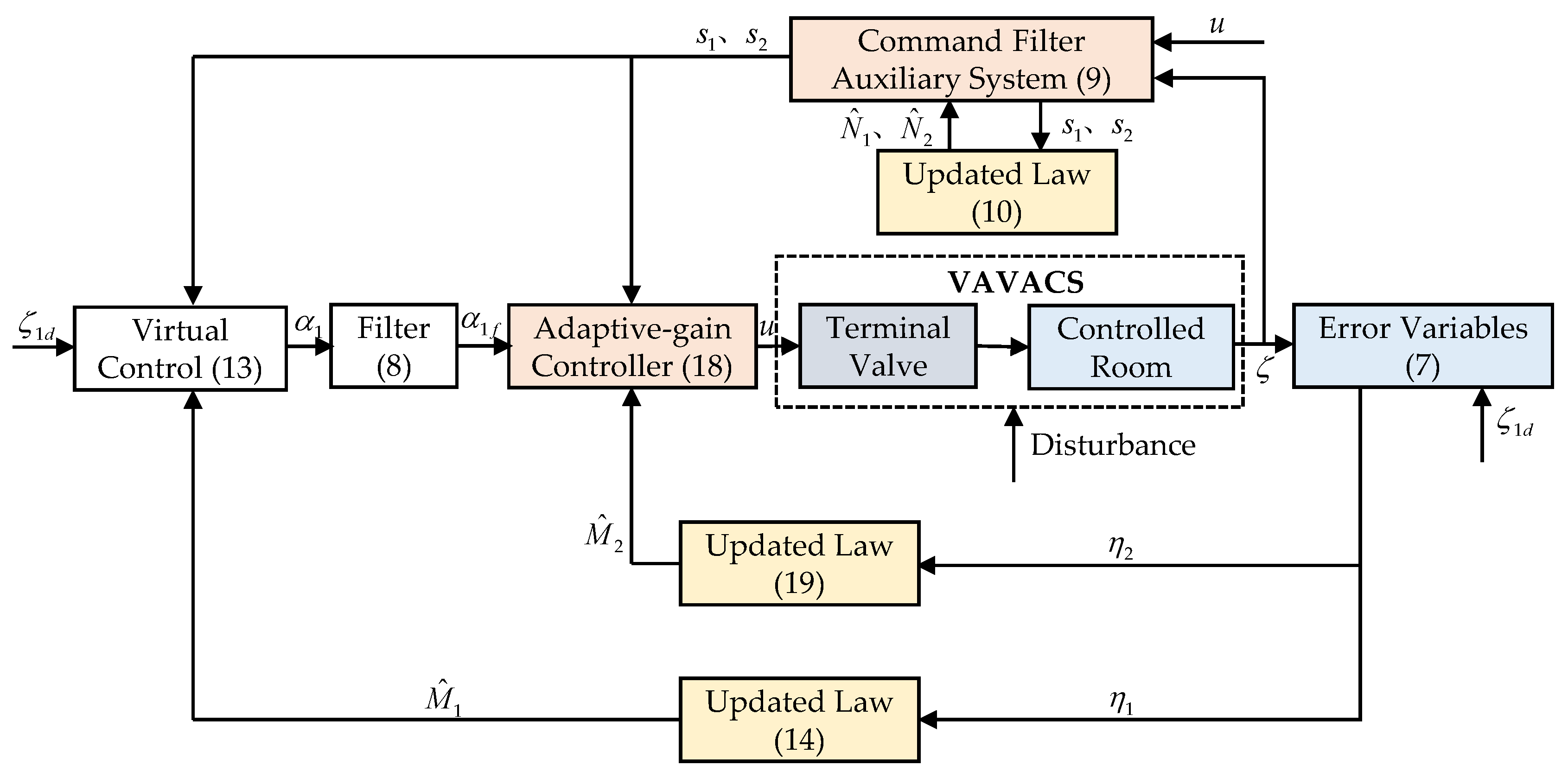
3. Command Filter-Based Adaptive-Gain Controller Design
3.1. Controller Design
3.2. Stability Analysis
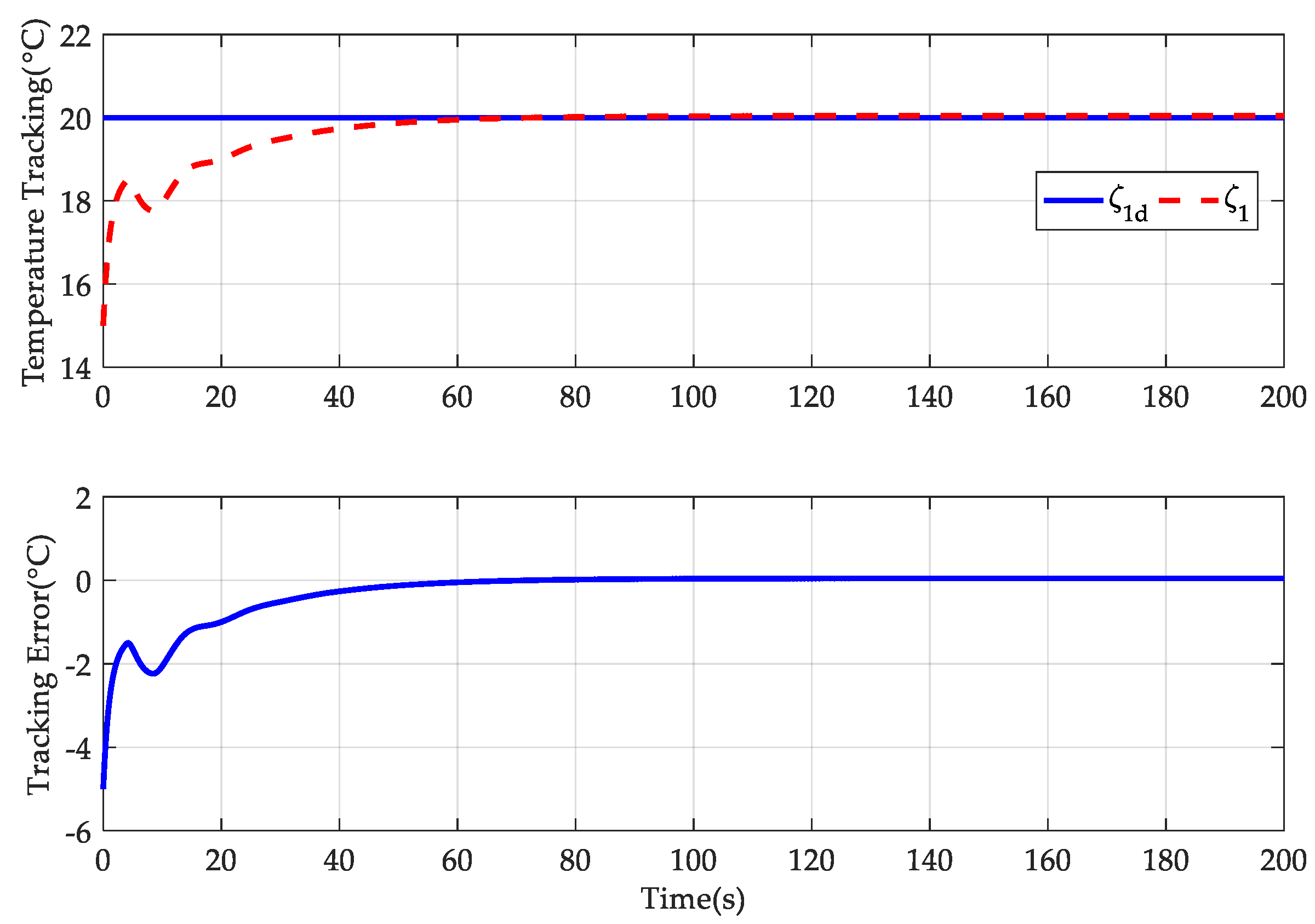
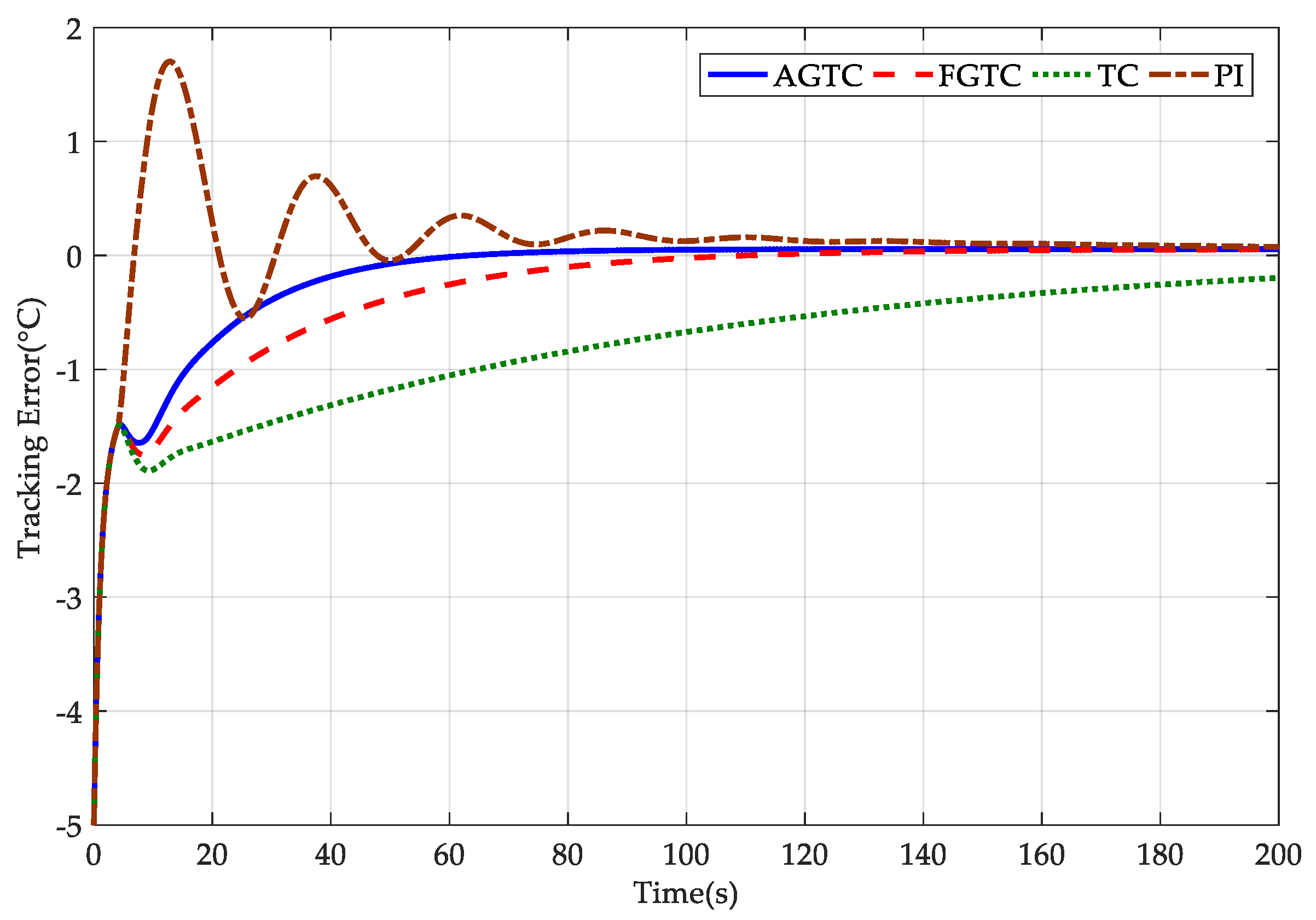
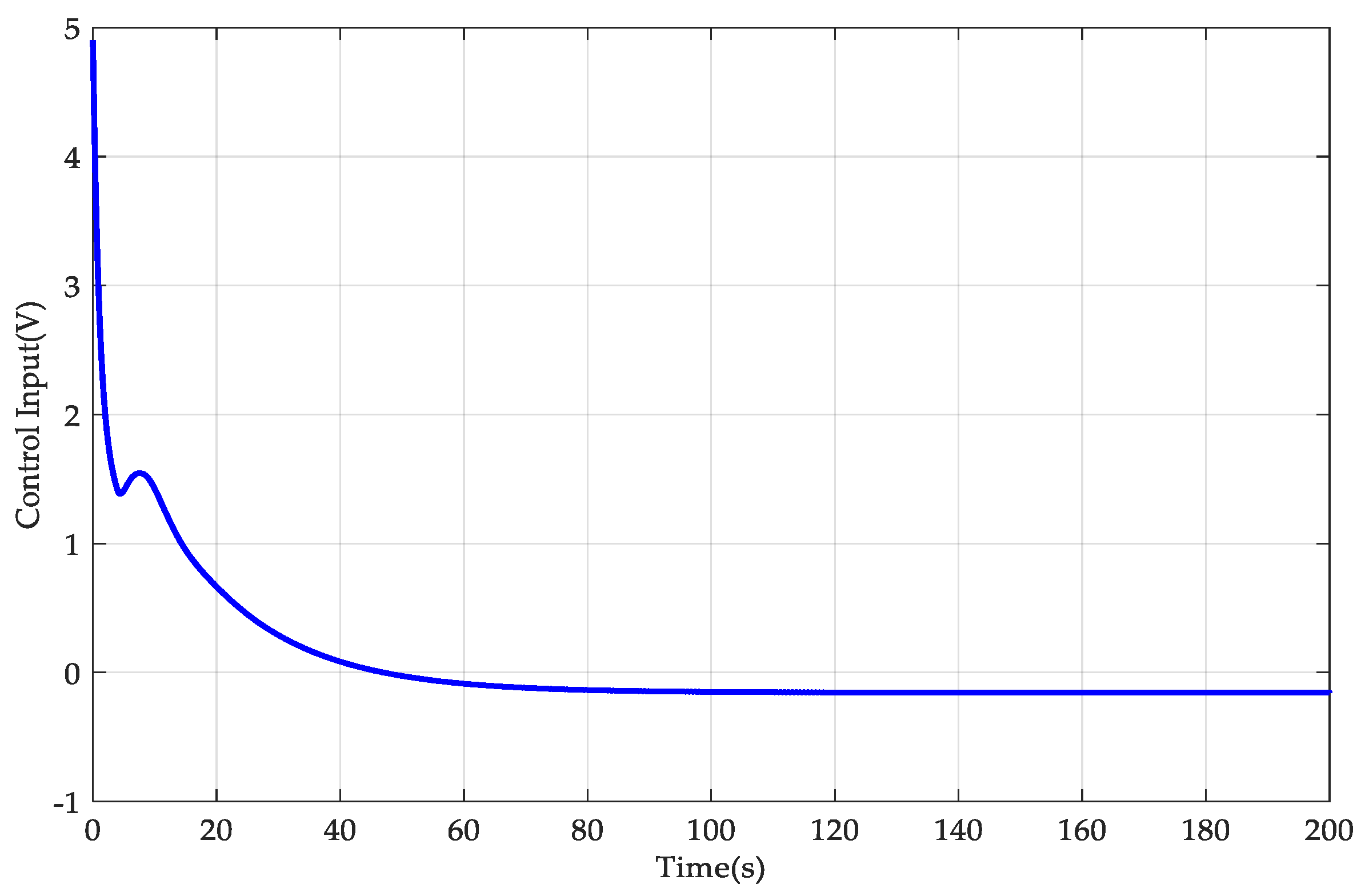
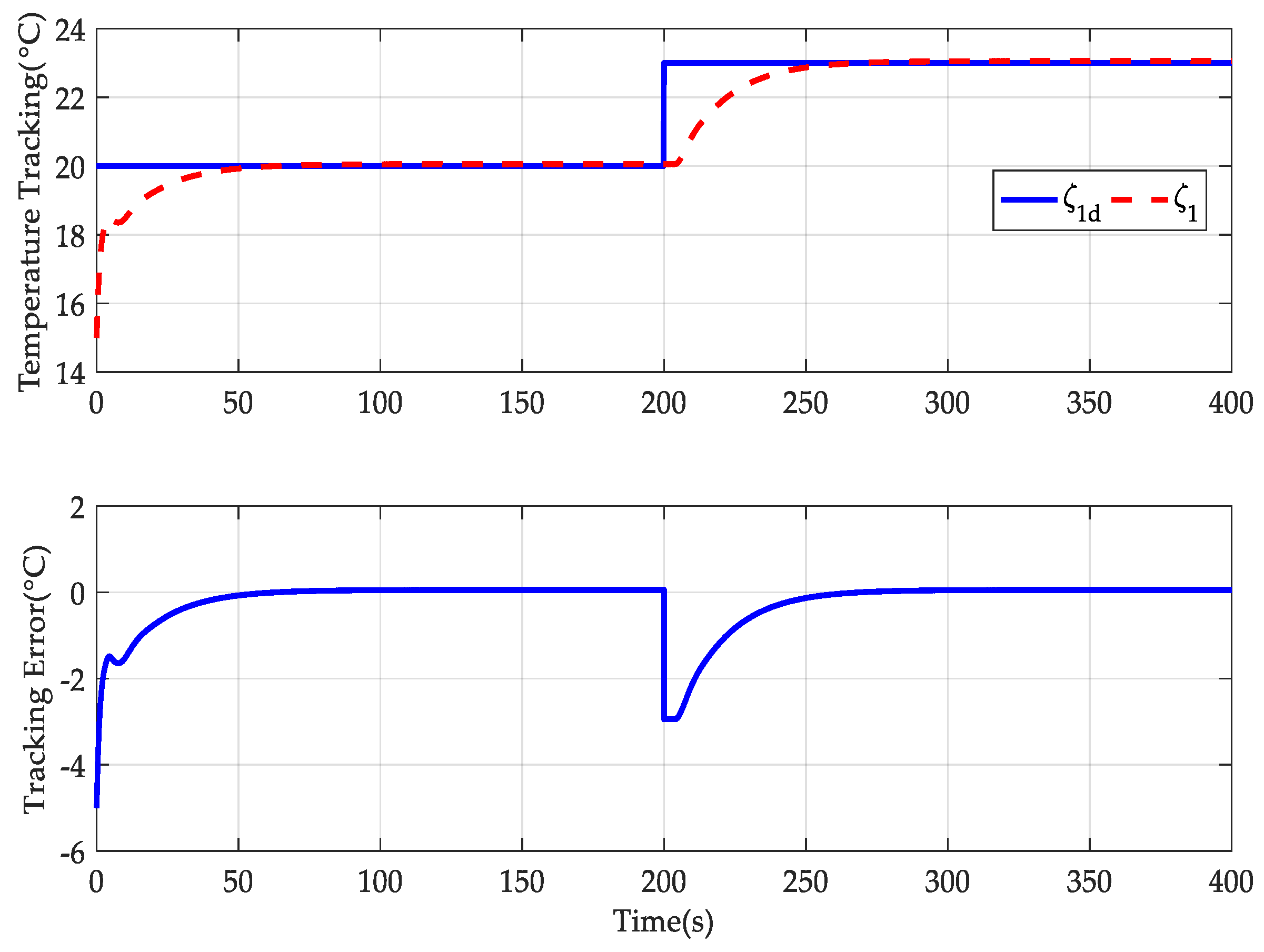
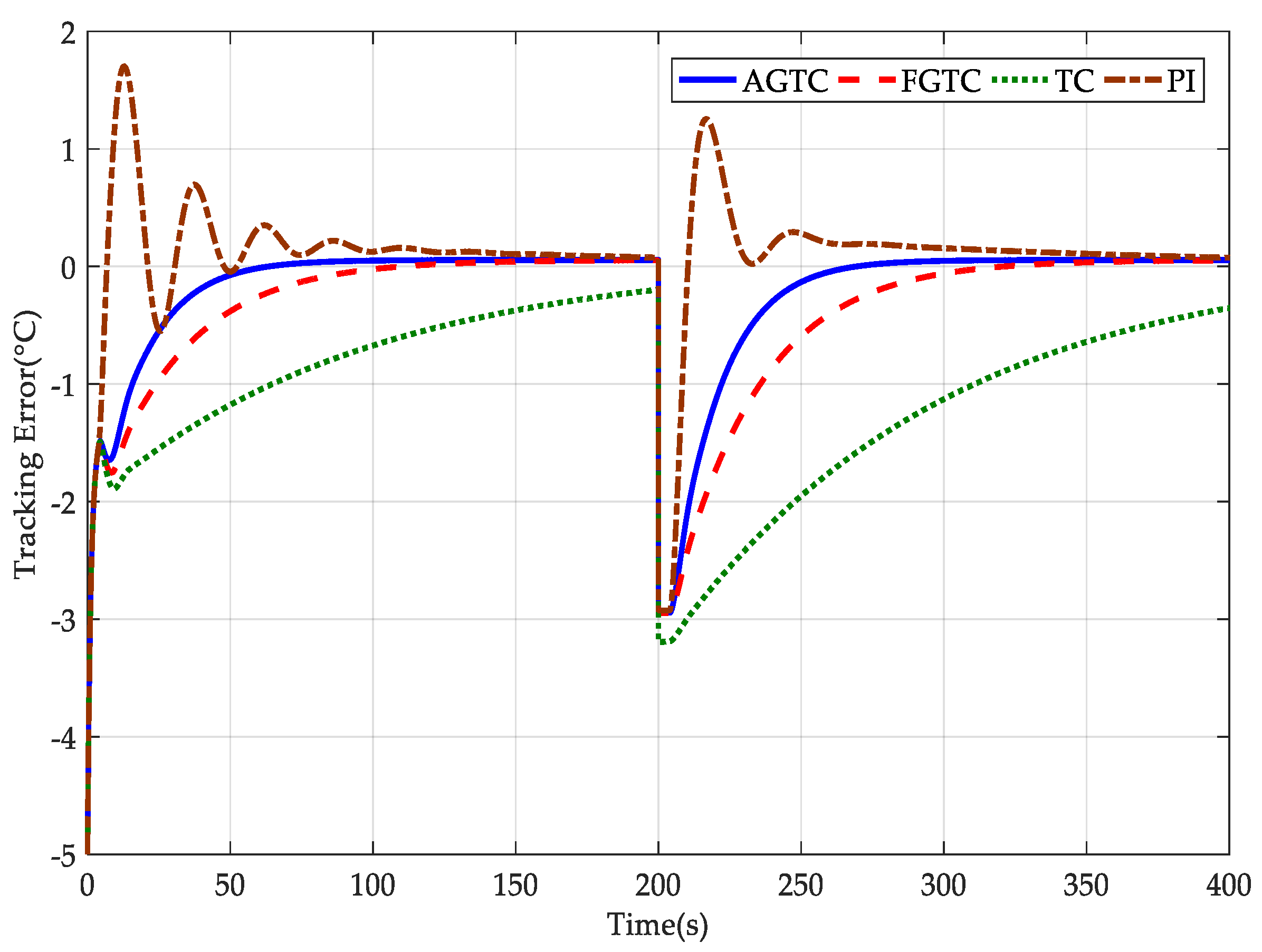
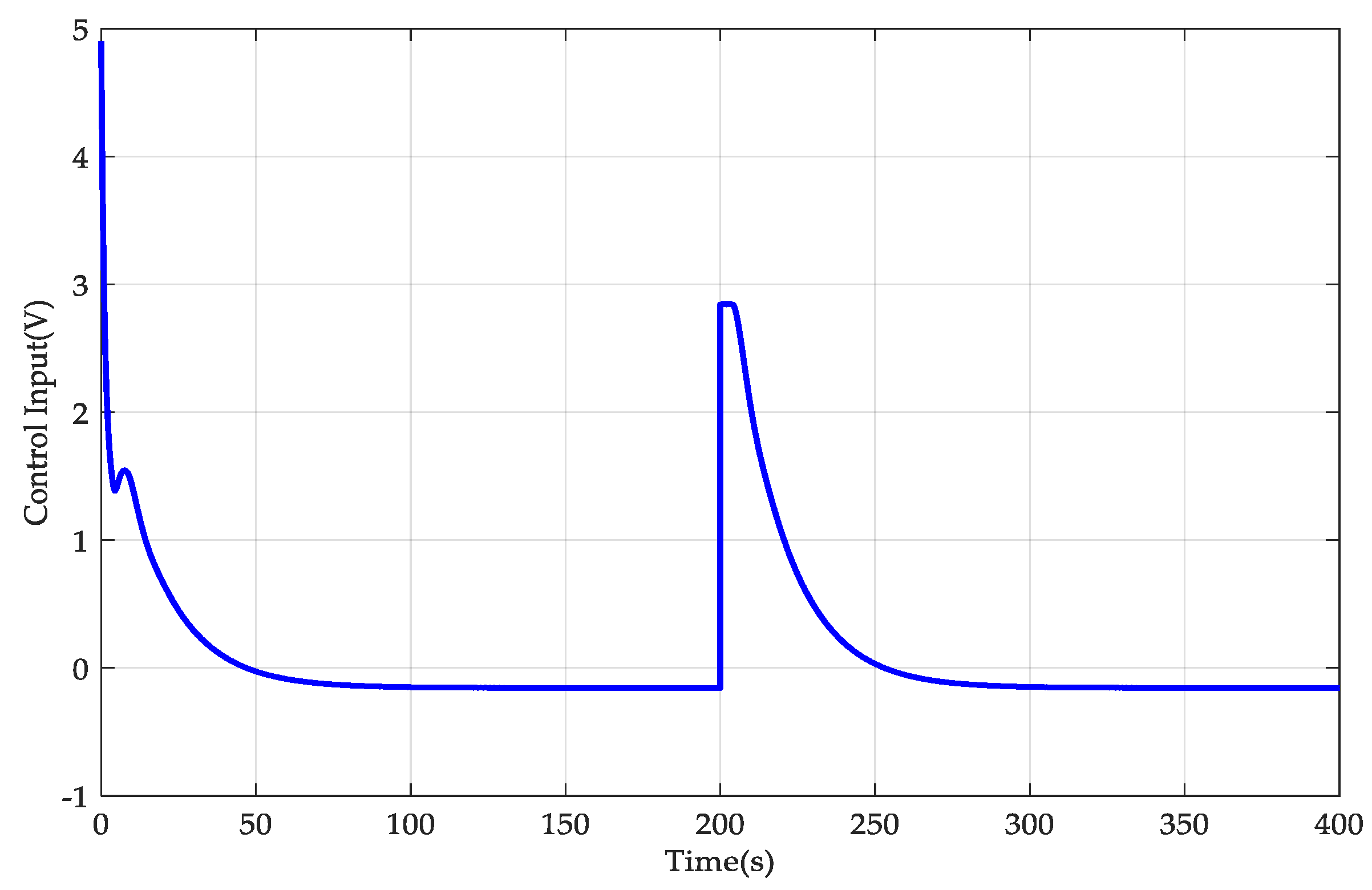
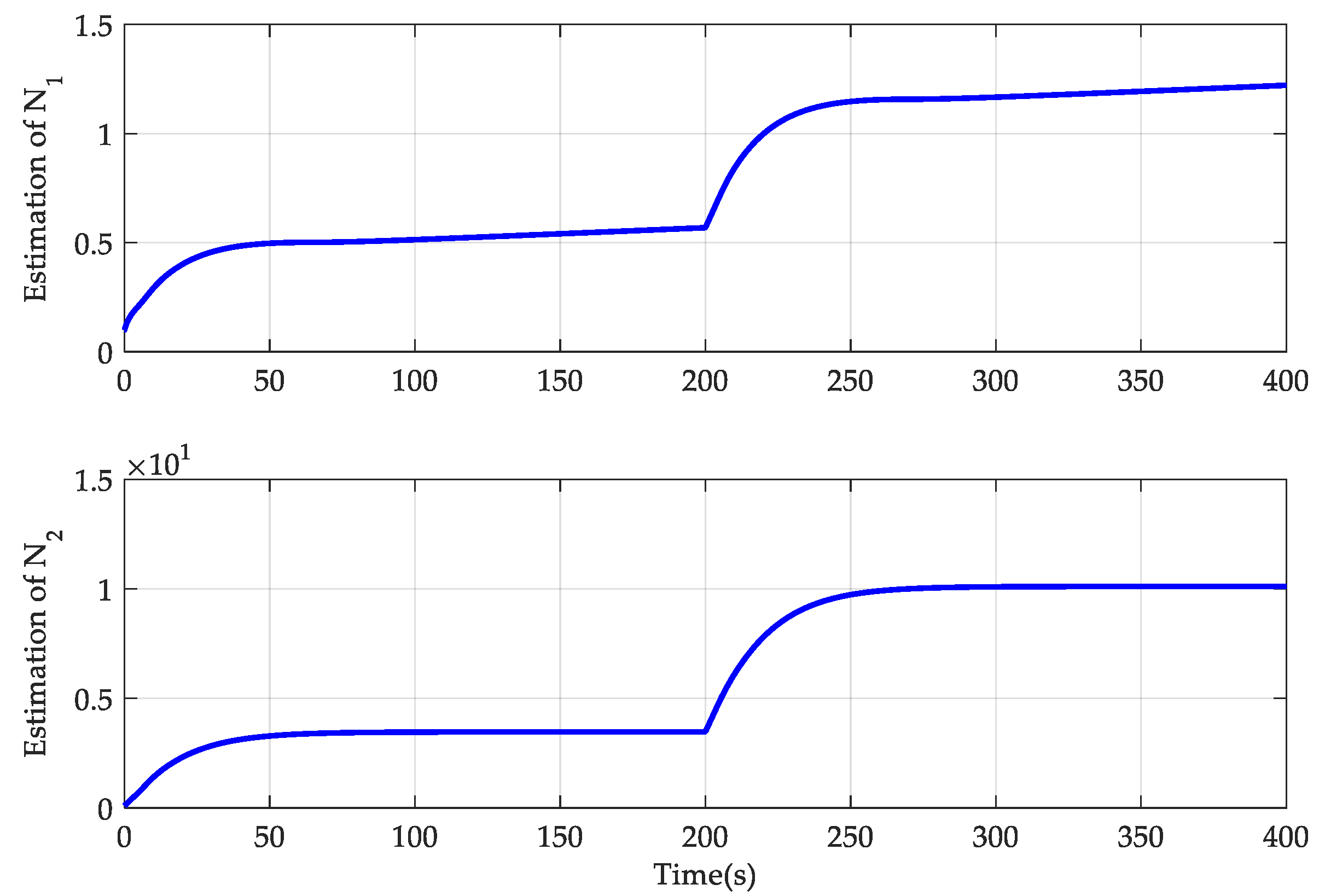
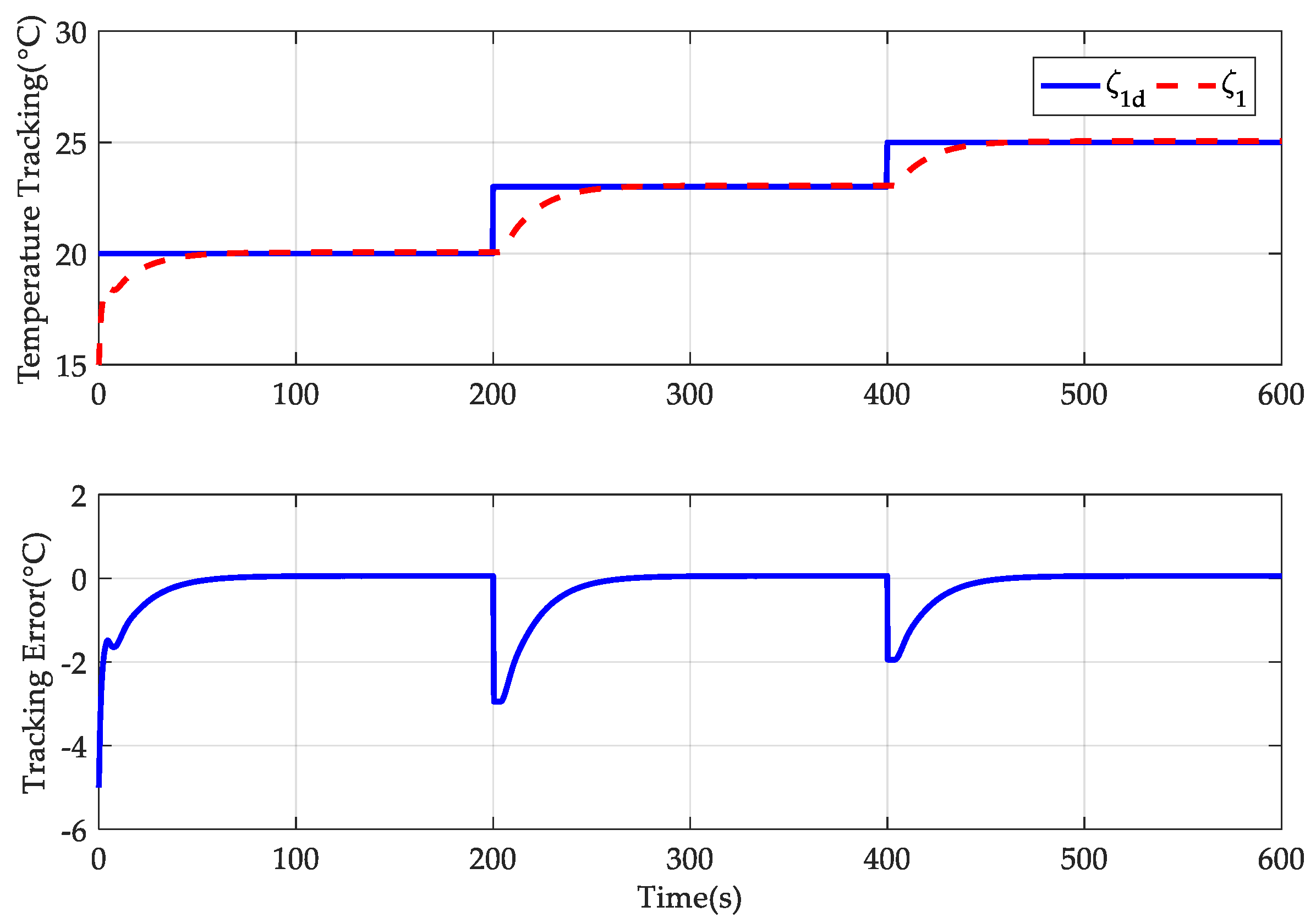
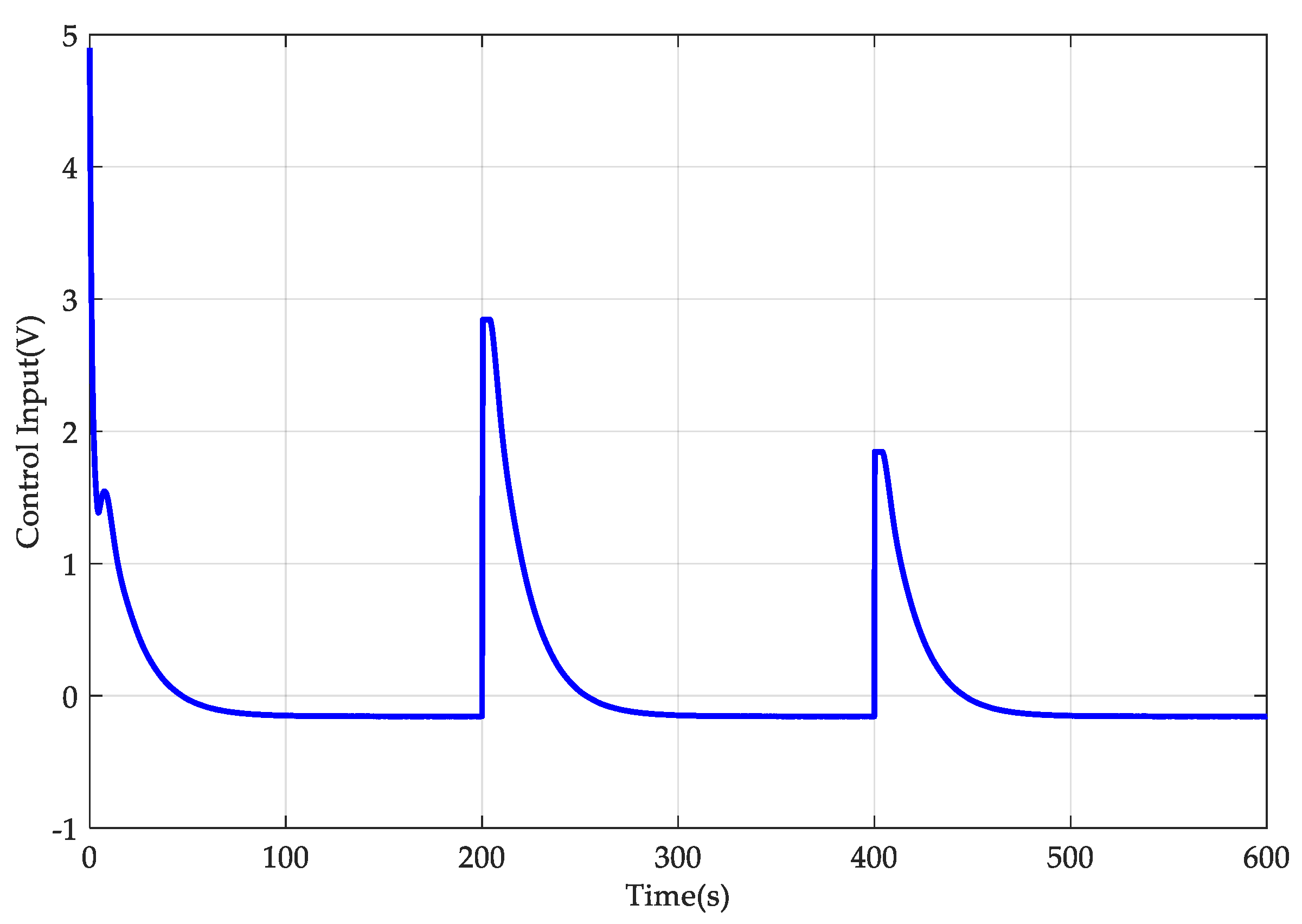
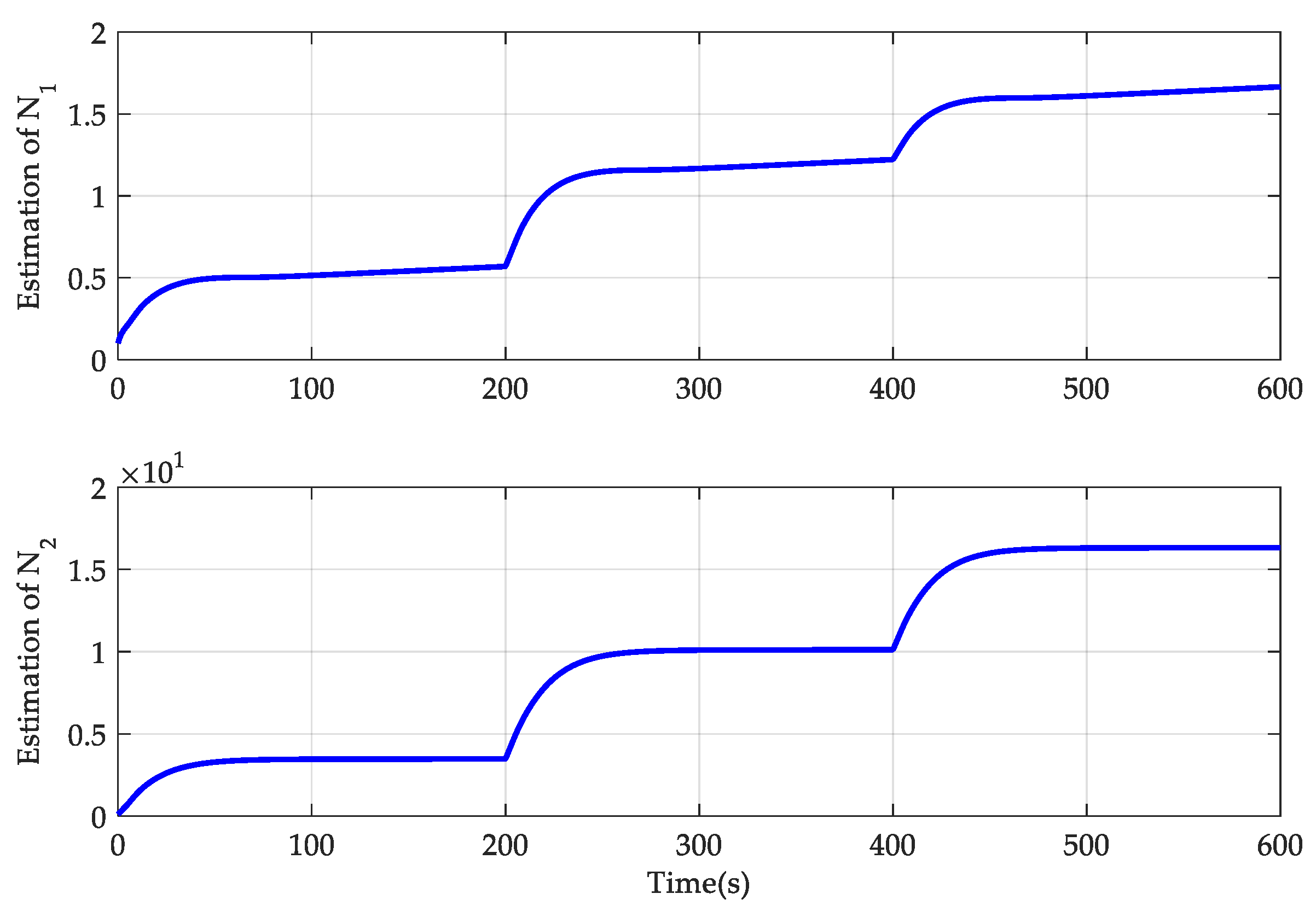
4. Simulation Results
- (1)
- AGTC: The adaptive-gain temperature controller was developed here, and its controller parameters are provided by , , , , , and . The other parameters were set as , , and . Also, .
- (2)
- FGTC: This is a fixed-gain temperature controller. The difference between the AGTC and FGTC is that a fixed controller gain technique is introduced into the FGTC. That is, and in the FGTC.
- (3)
- TC: This is a temperature controller without input delay compensation. The difference between the TC and FGTC is that the input delay is not compensated in the TC.
- (4)
- PI: This is a proportional–integral controller. The controller parameters were set as and .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature and Abbreviations
| VAVACS | variable air volume air-conditioning system |
| AGTC | adaptive-gain temperature controller |
| FGTC | fixed-gain temperature controller |
| TC | temperature controller without input delay compensation |
| PI | proportional–integral controller |
Appendix A
References
- Okochi, G.S.; Yao, Y. A Review of Recent Developments and Technological Advancements of Variable-Air-Volume (VAV) Air-Conditioning Systems. Renew. Sustain. Energy Rev. 2016, 59, 784–817. [Google Scholar] [CrossRef]
- Vashisht, S.; Rakshit, D. Recent Advances and Sustainable Solutions in Automobile Air Conditioning Systems. J. Clean. Prod. 2021, 329, 129754. [Google Scholar] [CrossRef]
- Li, W.; Gong, G.; Ren, Z.; Ouyang, Q.; Peng, P.; Chun, L.; Fang, X. A Method for Energy Consumption Optimization of Air Conditioning Systems Based on Load Prediction and Energy Flexibility. Energy 2022, 243, 123111. [Google Scholar] [CrossRef]
- Al-Yasiri, Q.; Szabó, M.; Arıcı, M. A Review on Solar-Powered Cooling and Air-Conditioning Systems for Building Applications. Energy Rep. 2022, 8, 2888–2907. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, L.; Li, Y.; Shi, Y.; Gao, X.; Hu, Y. A Review of Computing-Based Automated Fault Detection and Diagnosis of Heating, Ventilation and Air Conditioning Systems. Renew. Sustain. Energy Rev. 2022, 161, 112395. [Google Scholar] [CrossRef]
- Zhang, Y.; Yan, T.; Xu, X.; Gao, J.; Huang, G. Room Temperature and Humidity Decoupling Control of Common Variable Air Volume Air-Conditioning System Based on Bilinear Characteristics. Energy Built Environ. 2023, 4, 354–367. [Google Scholar] [CrossRef]
- Li, D.; Ahmat, M.; Cao, H.; Di, F. Optimization of Double-Closed-Loop Control of Variable-Air-Volume Air-Conditioning System Based on Dynamic Response Model. Buildings 2024, 14, 677. [Google Scholar] [CrossRef]
- Mohammed, J.A.K.; Mohammed, F.M.; Jabbar, M.A.S. Investigation of High Performance Split Air Conditioning System by Using Hybrid PID Controller. Appl. Therm. Eng. 2018, 129, 1240–1251. [Google Scholar] [CrossRef]
- Xie, Y.; Yang, P.; Qian, Y.; Zhang, Y.; Li, K.; Zhou, Y. A Two-Layered Eco-Cooling Control Strategy for Electric Car Air Conditioning Systems with Integration of Dynamic Programming and Fuzzy PID. Appl. Therm. Eng. 2022, 211, 118488. [Google Scholar] [CrossRef]
- Nasirpour, N.; Balochian, S. Optimal Design of Fractional-Order PID Controllers for Multi-Input Multi-Output (Variable Air Volume) Air-Conditioning System Using Particle Swarm Optimization. Intell. Build. Int. 2017, 9, 107–119. [Google Scholar] [CrossRef]
- Li, S.; Wei, M.; Wei, Y.; Wu, Z.; Han, X.; Yang, R. A Fractional Order PID Controller Using MACOA for Indoor Temperature in Air-Conditioning Room. J. Build. Eng. 2021, 44, 103295. [Google Scholar] [CrossRef]
- Zhao, B.Y.; Zhao, Z.G.; Li, Y.; Wang, R.Z.; Taylor, R.A. An Adaptive PID Control Method to Improve the Power Tracking Performance of Solar Photovoltaic Air-Conditioning Systems. Renew. Sustain. Energy Rev. 2019, 113, 109250. [Google Scholar] [CrossRef]
- Shi, S.; Miyata, S.; Akashi, Y.; Momota, M.; Sawachi, T.; Gao, Y. Model-Based Optimal Control Strategy for Multizone VAV Air-Conditioning Systems for Neutralizing Room Pressure and Minimizing Fan Energy Consumption. Build. Environ. 2024, 256, 111464. [Google Scholar] [CrossRef]
- Yang, X.; Ge, Y.; Deng, W.; Yao, J. Observer-Based Motion Axis Control for Hydraulic Actuation Systems. Chin. J. Aeronaut. 2023, 36, 408–415. [Google Scholar] [CrossRef]
- Rsetam, K.; Al-Rawi, M.; Al-Jumaily, A.M.; Cao, Z. Finite Time Disturbance Observer Based on Air Conditioning System Control Scheme. Energies 2023, 16, 5337. [Google Scholar] [CrossRef]
- Kamalapurkar, R.; Fischer, N.; Obuz, S.; Dixon, W.E. Time-Varying Input and State Delay Compensation for Uncertain Nonlinear Systems. IEEE Trans. Automat. Contr. 2016, 61, 834–839. [Google Scholar] [CrossRef]
- Yang, X.; Ge, Y.; Deng, W.; Yao, J. Command Filtered Adaptive Tracking Control of Nonlinear Systems with Prescribed Performance under Time-Variant Parameters and Input Delay. Int. J. Robust Nonlinear Control 2023, 33, 2840–2860. [Google Scholar] [CrossRef]
- Na, J.; Huang, Y.; Wu, X.; Su, S.F.; Li, G. Adaptive Finite-Time Fuzzy Control of Nonlinear Active Suspension Systems with Input Delay. IEEE Trans. Cybern. 2020, 50, 2639–2650. [Google Scholar] [CrossRef] [PubMed]
- Li, D.-P.; Liu, Y.-J.; Tong, S.; Chen, C.L.P.; Li, D.-J. Neural networks-based adaptive control for nonlinear state constrained systems with input delay. IEEE Trans. Cybern. 2019, 49, 1249–1258. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Zhang, X.; Zong, X.; Wang, G. Adaptive fuzzy control for non-strict feedback nonlinear systems with input delay and full state constraints. J. Frankl. Inst. 2020, 357, 6858–6881. [Google Scholar] [CrossRef]
- Ma, J.; Xu, S.; Zhuang, G.; Wei, Y.; Zhang, Z. Adaptive Neural Network Tracking Control for Uncertain Nonlinear Systems with Input Delay and Saturation. Int. J. Robust Nonlinear Control 2020, 30, 2593–2610. [Google Scholar] [CrossRef]
- Ma, J.; Xu, S.; Ma, Q.; Zhang, Z. Event-Triggered Adaptive Neural Network Control for Nonstrict-Feedback Nonlinear Time-Delay Systems with Unknown Control Directions. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4196–4205. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, X.; Xu, R. Command-Filter-Based Adaptive Neural Tracking Control for a Class of Nonlinear MIMO State-Constrained Systems with Input Delay and Saturation. Neural Netw. 2022, 147, 152–162. [Google Scholar] [CrossRef]
- Zhu, Z.; Liang, H.; Liu, Y.; Xue, H. Command Filtered Event-Triggered Adaptive Control for MIMO Stochastic Multiple Time-Delay Systems. Int. J. Robust Nonlinear Control 2022, 32, 715–736. [Google Scholar] [CrossRef]
- Yang, X.; Ge, Y.; Deng, W.; Yao, J. Precision Motion Control for Electro-Hydraulic Axis Systems under Unknown Time-Variant Parameters and Disturbances. Chin. J. Aeronaut. 2024, 37, 463–471. [Google Scholar] [CrossRef]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P. Nonlinear and Adaptive Control Design; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Yang, X.; Deng, W.; Yao, J. Neural Adaptive Dynamic Surface Asymptotic Tracking Control of Hydraulic Manipulators with Guaranteed Transient Performance. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 7339–7349. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (J/°C) | 1 × 104 | c (J/kg/°C) | 1.2 × 103 |
| (kg/m3) | 1.1 | Qr (W) | 3.5 × 103 |
| Vr (m3) | 4 × 101 | Ts (°C) | 3 × 101 |
| (m/s/V) | 0.58 | K (s−1) | 0.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Liu, H.; Yang, X. Precision Control for Room Temperature of Variable Air Volume Air-Conditioning Systems with Large Input Delay. Energies 2024, 17, 4227. https://doi.org/10.3390/en17174227
Shi J, Liu H, Yang X. Precision Control for Room Temperature of Variable Air Volume Air-Conditioning Systems with Large Input Delay. Energies. 2024; 17(17):4227. https://doi.org/10.3390/en17174227
Chicago/Turabian StyleShi, Jinfeng, Haoyang Liu, and Xiaowei Yang. 2024. "Precision Control for Room Temperature of Variable Air Volume Air-Conditioning Systems with Large Input Delay" Energies 17, no. 17: 4227. https://doi.org/10.3390/en17174227
APA StyleShi, J., Liu, H., & Yang, X. (2024). Precision Control for Room Temperature of Variable Air Volume Air-Conditioning Systems with Large Input Delay. Energies, 17(17), 4227. https://doi.org/10.3390/en17174227