1. Introduction
The reasons why the world has turned to electric vehicles are well known. We will mention those that we consider most important. The first one is reducing greenhouse gas emissions. HEVs and EVs could reduce these emissions by up to 80%, eliminating most urban air pollution [
1]. The second reason is that HEVs and EVs are more efficient than conventional vehicles with internal combustion engines (ICEVs); the difference in fuel consumption can reach up to 60% at a low to medium average speed [
2]. If good management is applied, it is even possible to improve the efficiency of electrical networks using these vehicles. The last reason is the continuous increase in the price of fossil fuels; currently, their cost is among the highest levels in history. However, the issues raised by the increase in the number of plug-in hybrid electric vehicles (PHEVs) and EVs are complex. One of the most important issues is the lack of power supply infrastructure and the relatively long time required to recharge the battery. Another significant drawback is the high cost of energy sources in EVs and PHEVs [
3]. High upfront costs and a relatively limited battery life are other disadvantages. These shortcomings persist, regardless of how much the traveling distances of HEVs and EVs have been extended. It should be mentioned that, for HEVs, the battery capacity, energy management system, and powertrain architecture are all important; for this reason, these subjects are always relevant, and new solutions are being sought [
4,
5,
6,
7,
8,
9,
10].
People still prefer more independent vehicles that also meet the high standards for reducing pollution levels to avoid some of these shortcomings. These tend to be hybrid vehicles, especially plug-in and range-extended ones. Specialists estimate that the HEV market will increase by 20% in the next five years [
4]. In addition, it is estimated that the price of HEVs will become comparable to that of conventional vehicles and even cheaper after 2025, while well-designed HEVs can perform better than conventional ones [
11,
12]. In principle, they combine the advantages of electric and classic vehicles, but their control is complex.
The main objectives of this paper are to determine and compare the performance of hybrid vehicles for which different engine/electric motor combinations are made. Using ADVISOR software (ADVISOR 2003-00-r0116, 2013), series and parallel hybrid vehicles were configured and simulated, and their performance was estimated for two driving cycles. Then, we compared their performance with the performances of some conventional vehicles. Thus, in the same driving cycles, three conventional vehicles were also simulated, with the chosen engines being the ones considered for HEVs.
When we discuss the performance of a vehicle, we refer to the following parameters: the time required for the vehicle to reach certain speeds, the maximum acceleration and speed, the possibility of maintaining a certain speed for some time on a maximum incline ramp (gradeability), the equivalent fuel consumption rate, and the overall efficiency of the vehicle.
Without conducting an exhaustive study, six configurations of series hybrid vehicles, six parallel hybrid vehicles, and three conventional vehicles were considered. Based on the results, some important conclusions can be drawn.
The most important thing highlighted in this study is the need for a good correlation between the electric motor and the engine to obtain the desired performance with maximum efficiency. This study also underlines the importance of analyzing every situation (the type of car, the location of use—city, combined route, highway, etc.), which, at a given moment, can make a hybrid vehicle of a certain configuration more advantageous than another, but also more or even less performant than a conventional one. Finally, the fact that high-performance hybrid vehicles have a reduced negative impact on the environment and our health is also discussed.
This paper is organized as follows: In
Section 2, the powertrain architectures of HEVs are shown, and those used in this study are discussed. Additionally,
Section 2 presents the vehicle model used in the simulation and its main relationships.
Section 3 details the configurations of the considered models using the ADVISOR software as well as the basic characteristics of their components. In the last section, the simulation results are discussed, and the most important conclusions are presented.
2. Materials and Methods
2.1. Architecture of Hybrid Vehicles
Regarding the propulsion system, hybrid vehicles can have one of the following types [
13,
14]: series, parallel, series–parallel, or complex, as shown in
Figure 1.
We studied only the first two types, combining three engines with different powers (41, 50, and 63 kW) and two electrical motors with significantly different power levels (49 and 124 kW), but a comparable maximum torque.
It can be seen in the first figure that, in the case of series hybrid vehicles, only the electric motor propels the vehicle, while in the other types, both the electric motor and the engine can propel the vehicle. This is why series hybrid vehicles, similar to fully electric ones, usually only have a single-speed gearbox. Very often, there are exceptions to this rule. Researchers have studied and recommended, for reasons of reducing consumption, multi-speed gearboxes or those with a variable gear ratio [
15,
16,
17]. Parallel HEVs have a multispeed gearbox, similar to engine (MCI) vehicles.
The overall efficiency of series HEVs is high if the engine efficiency is high; this happens when the engine works at close to the rated power [
18]. It is important to mention that the series architecture is used particularly for passenger transport vehicles, such as busses, while other architectures are used for small and medium vehicles. Yet, thanks to the increase in the efficiency of energy storage systems and the use of ultracapacitors [
19] and power converters for electric motors, the series architecture seems to also have become a competitor for other types of vehicles.
Each of the configurations (series and parallel) has advantages and disadvantages, which are briefly presented below [
20].
In the case of series HEVs, some of the main advantages are the optimal operation of the engine for all vehicle operating regimes, simpler powertrain control, a lower specific fuel consumption rate, and, of course, fewer gas emissions compared to engine vehicles.
The disadvantage of series HEVs is the higher energy losses because the mechanical energy of the engine is transformed into electrical power (via the generator) and, after that, again into mechanical (via the motor) to propel the vehicle. Moreover, they have a higher mass (due to the generator) than parallel HEVs and usually a higher fuel consumption rate.
Among the main advantages of parallel HEVs is that the total power of the vehicle is the sum of the engine power and electrical motor power levels. Additionally, their mass is lower than that of series and conventional vehicles at the same power, their fuel consumption is usually lower than that of series HEVs, and the losses are lower, with part of the engine’s energy being transmitted directly to the propulsion group. There is no specific generator, as the electrical motor is also the generator. The failure of an electric motor does not stop the operation of the vehicle, such as in classic vehicles.
The various downsides of parallel HEVs are as follows: complex powertrain control, a higher complexity of the implementation of distributed propulsion than in the case of series HEVs, and more complex mechanical parts.
All HEVs allow for electrical brakes, with the mechanical energy of the vehicle transformed into electrical power and transferred to the energy storage system (batteries and ultracapacitors).
Considering the same power components for the two types of HEVs, it was found in the literature that, in the case of series HEVs, they can have a maximum efficiency of 25% (from the propulsion motor/engine to the wheels), and for parallel ones, the maximum is around 45% [
21]. However, there are specific situations in which the series architecture offers results comparable to or even better than the parallel one [
22].
2.2. The Considered Vehicle Model
The ADVISOR (ADvanced VehIcle SimulatOR) software, created by the U.S. Department of National Renewable Energy Laboratory’s (NREL), Center for Transportation Technologies and Systems, was used to estimate the performances of the vehicle models [
23].
ADVISOR considers the longitudinal vehicle model shown in
Figure 2 [
24].
Based on this model, the motion equation is
where
m is the vehicle’s inertial mass, which can be approximated as 5% higher than the real mass [
25];
a is the acceleration;
Ft is the tractive force;
Fw is the wind force;
Fr is the rolling resistance force; and
g—9.81 (m/s
2)—is the gravitational acceleration.
The wind force is proportional to the air density ρ, the frontal surface
A, and the relative wind–car velocity
v; the proportionality coefficient is the drag coefficient,
Cd. For the chosen “small car” vehicle type, this coefficient was 0.335, and the front area was 2 m
2. The air density was set to 1.2 kg/m
3.
The rolling resistance force depends on the vehicle mass, the incline road angle, and the rolling resistance coefficient,
Cr, which is a function of the tires and the road surface. In all cases, this coefficient was 0.009, and the road incline was set to zero.
The tractive force is dependent on the motor/engine torque,
Tm; the total transmission ratio
; and the effective wheel radius,
r.
This force can be, at most, equal to the maximum frictional force between the tires of the driving wheels and the running surface, which is the maximum force before slip begins.
One must consider that, because of the elasticity of the tires, there is always slip (s), but this is not the slip between the tires and the running surface of the contact area (skating). This slip is the difference between the translational speed of the center of the tire and the product Ω
R, where
R is the free-rolling radius of the tire, which is greater than the effective radius,
r. Thus, the slip is calculated as follows [
26]:
Depending on the slip, the tractive force is at its maximum when the slip is between 15 and 20%.
Another important parameter specific to HEVs and EVs that must be correctly modeled, and upon which the vehicle model’s performance depends at a given moment, is the battery’s state of charge,
SOC. This can be determined according to the initial state of charge,
SOC0; the coulombic efficiency of the battery,
ηc; the battery current expressed in A,
i (the “−” sign is used if the direction of the current in the conductor is moving toward the plus terminal, i.e., the battery is charging); and the battery capacity,
Q0, expressed in Ah.
2.3. Configuration with ADVISOR
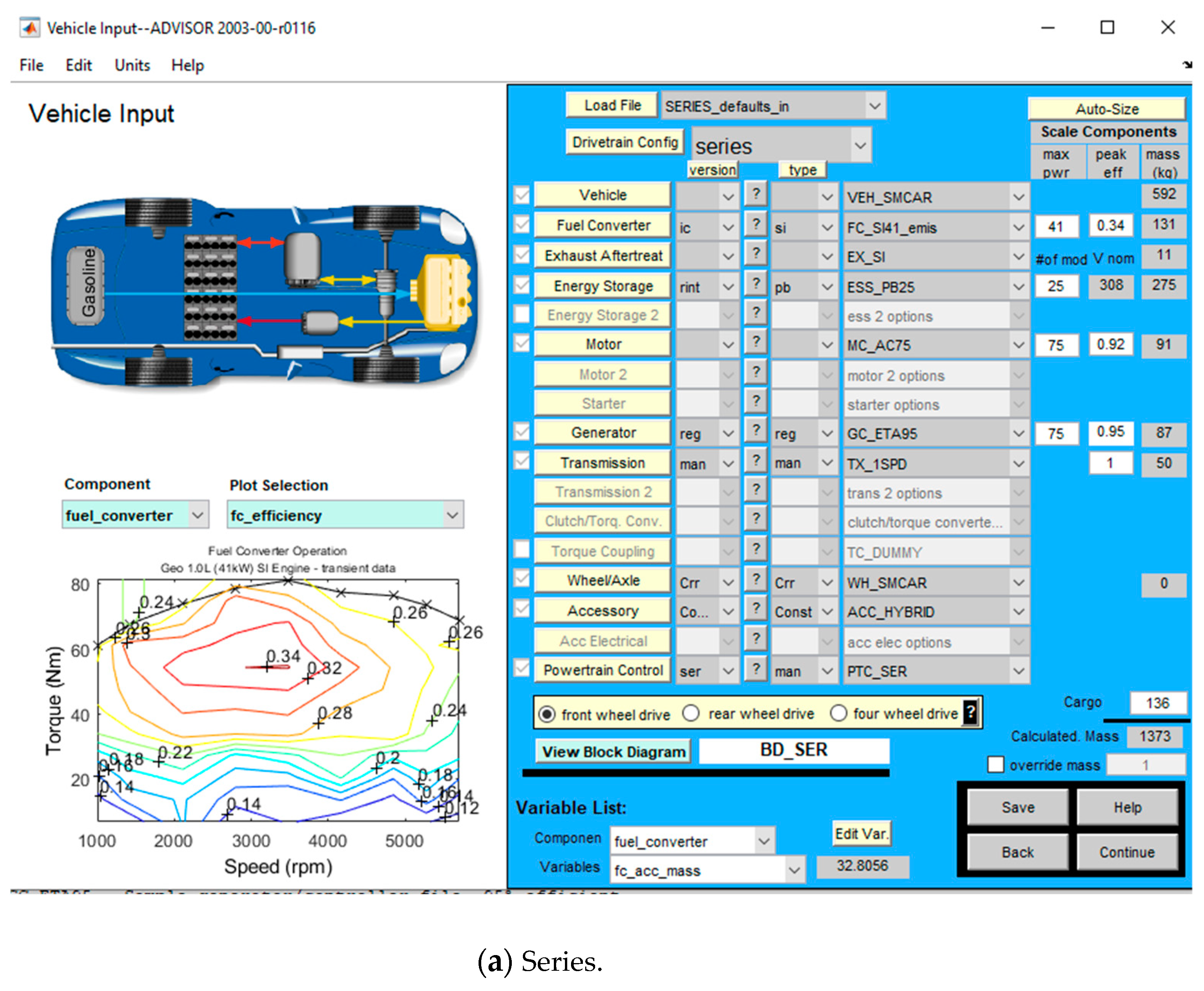
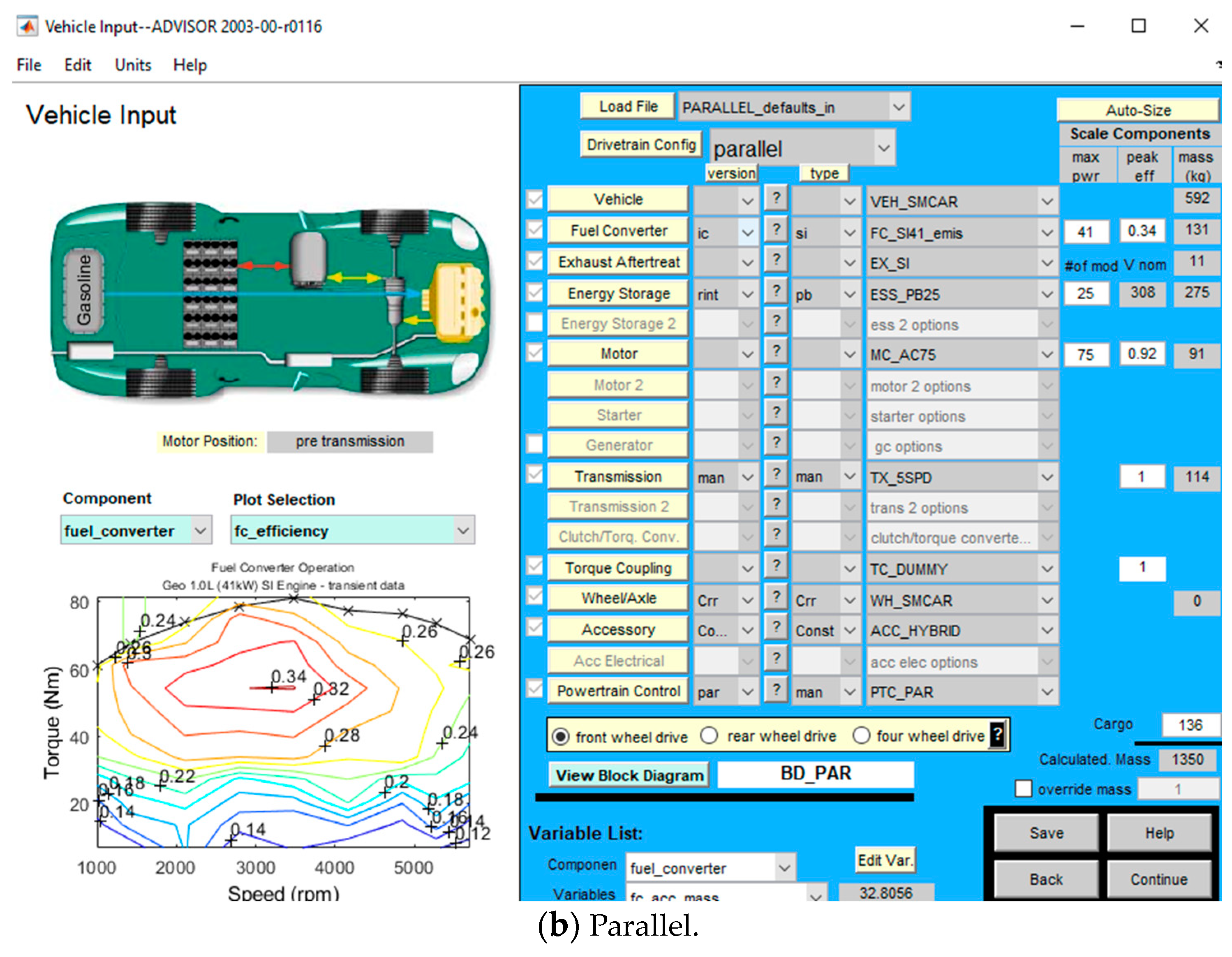
Twelve HEV models were configured using ADVISOR, which runs under MATLAB. Six of them were series hybrid types (
Figure 3a) and the other six were parallel hybrids (
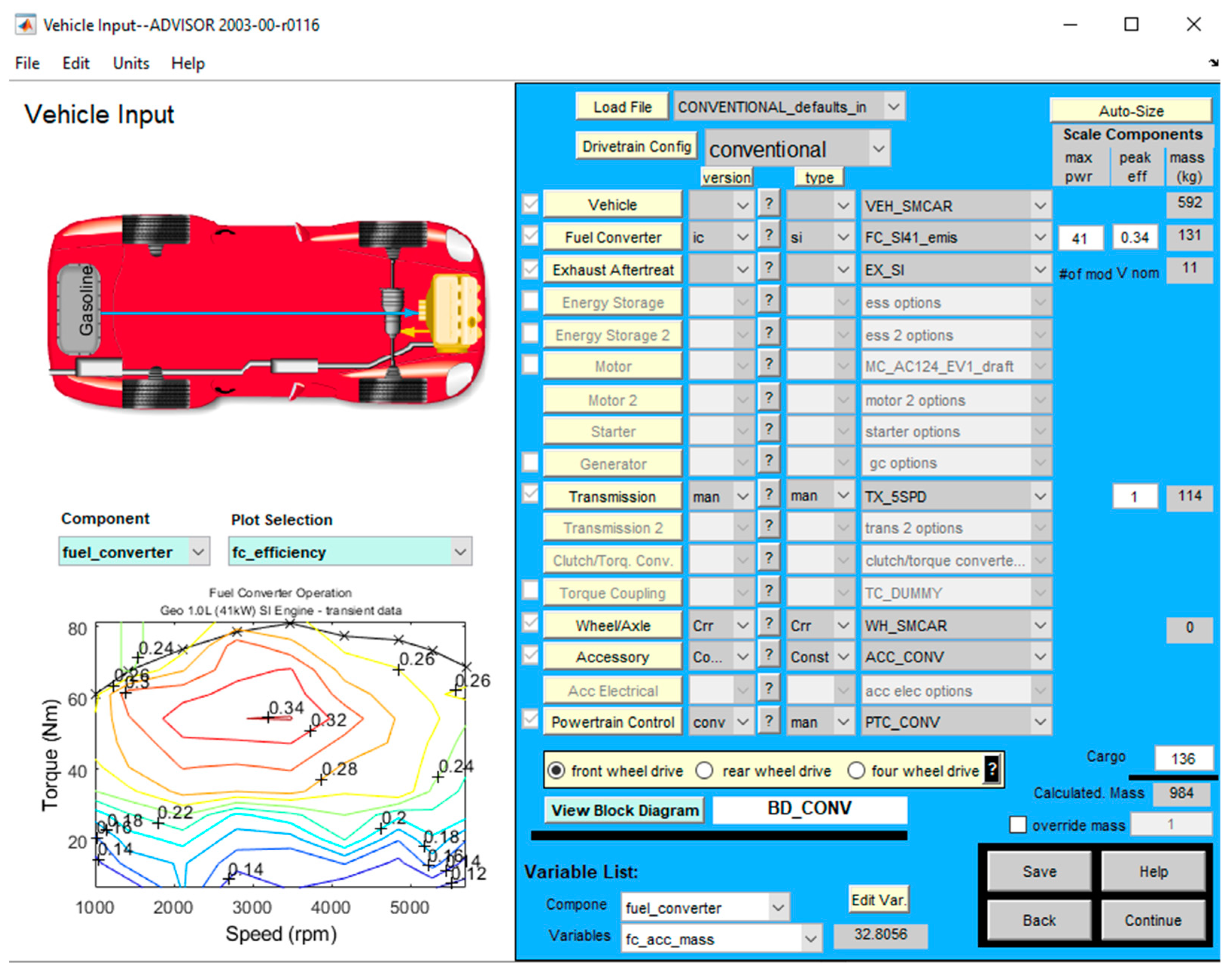
Figure 3b). Then, three such models were configured (
Figure 4) to compare their performances with those of conventional vehicles (CVs).
For the HEV models, the following architectures were used for the engine and electrical motors:
An engine of 41 kW and an induction motor of 124 kW;
An engine of 50 kW (Honda Insight) and an induction motor of 124 kW;
An engine of 63 kW and an induction motor of 124 kW;
An engine of 41 kW and a synchronous PM motor of 49 kW;
An engine of 50 kW (Honda Insight) and a synchronous PM motor of 49 kW;
An engine of 63 kW and a synchronous PM motor of 49 kW.
The following series models were used: HS1, with a mass of 1373 kg; HS2—1374 kg; HS3—1448 kg; HS4—1342 kg; HS5—1343 kg; and HS6—1417 kg. The parallel models were as follows: HP1—1350 kg; HP2—1351 kg; HP3—1425 kg; HP4—1319 kg; HP5—1320 kg; and HP6—1394 kg.
The following conventional vehicles were used: CV1—a 41 kW engine and a mass of 984 kg, CV2—a 50 kW engine and a mass of 985 kg, and CV3—a 63 kW engine and a mass of 1059 kg. For all the models (HEV and CV), the total mass included a cargo mass of 136 kg.
For the series models, a generator with 75 kW maximum power, a weight of 87 kg, and a peak efficiency of 0.95 was considered. The generator delivered a maximum current of 480 A, and the minimum voltage was 120 V.
A single-speed gearbox of 50 kg was chosen for the series models, and a five-speed gearbox of 114 kg was chosen for the parallel ones. Considering the above, the difference in mass between the series and parallel HEVs was 23 kg, with the lightest being the parallel ones.
The gear ratios for the five-speed gearbox were predefined at 13.45, 7.57, 5.01, 3.77, and 2.83.
For the series hybrid vehicles, the single-speed gearbox was set, the gear ratio was not predefined, and its value was decided in terms of the motor’s maximum speed and wheel radius, so a maximum speed of 145 km/h was reached, considering a 10% slip.
The battery system for all the models was ESS_PB25, with a 25-unit Hawker Genesis 12V26Ah10EP VRLA battery with a rated voltage of 308 V. The maximum capacity at C/5 was 25 Ah. The initial SOC was 0.6, and the range of variation was 0.4–0.8.
For all series, parallel, and conventional models, a constant power of 700 W was considered for the required accessories.
For the conventional vehicles (CVs), we used the same three engines of 41 kW, 50 kW, and 63 kW, the same five-speed gearbox, and the same vehicle body (a small car) as those of the HEVs.
The considered engines had a 1 L volumetric capacity in the case of the 41 and 50 kW engines, and a 1.9 L capacity for the 63 kW, non-enriched engine. The speed–torque and efficiency curves for these engines are shown in
Figure 5. The peak efficiencies for the three engines were 0.34 (40 kW), 0.4 (50 kW, Honda Insight), and 0.34 (63 kW).
The induction motor had 124 kW, 91 kg, and a peak efficiency of 0.92. The synchronous PM engine had a power of 49 kW, 60 kg, and a maximum efficiency of 0.96. The operation curves of these motors are shown in
Figure 6.
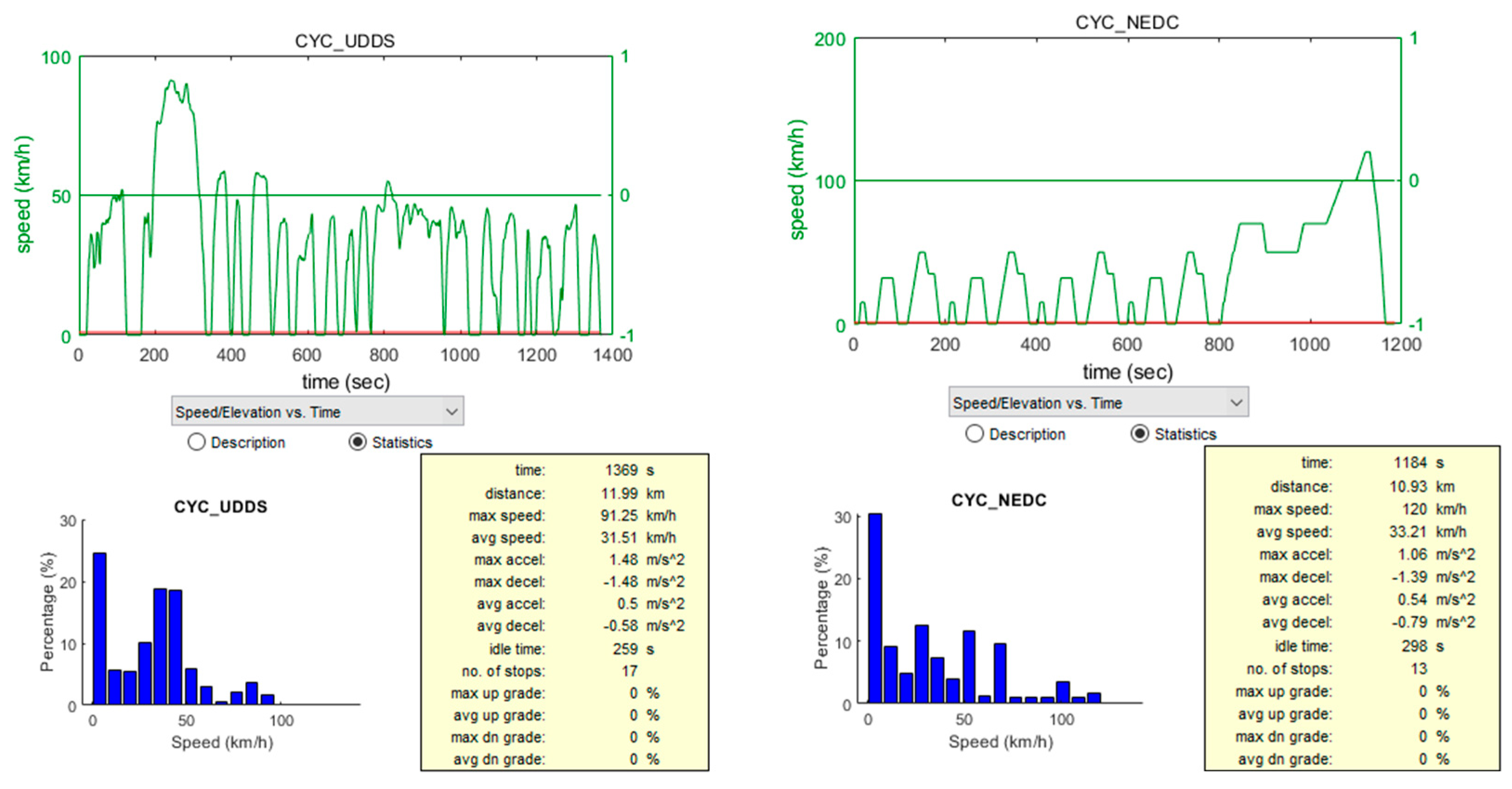
For each model, two driving cycles were imposed. The first, the UDDS (urban dynamometer driving schedule), is specific to urban driving, and its speed–time relationship is set for 1369 s and 11.99 km. The United States Environmental Protection Agency has approved it to test the fuel economy of light-duty vehicles, and it is also known as the U.S. FTP-72 (federal test procedure) cycle.
The second was the NEDC (new European driving cycle). This is a European driving cycle designed to assess the emission levels of engines and the fuel economy of passenger cars. It is also referred to as the MVEG (motor vehicle emissions group) cycle, and its speed–time relationship is set for 1184 s and 10.93 km.
This test is defined in R101 of the UNECE (United Nations Economic Commission for Europe) for measuring fuel consumption and/or electric energy consumption and the electric range of hybrid and fully electric M1 and N1 vehicles.
For the acceleration and gradability tests, the options shown in
Figure 8 were set.
3. Results and Conclusions
The initial SOC of the battery was set to 0.6, and the range of variation during rolling in the cycle was set between 0.4 and 0.8. Because the vehicle can run only with the battery energy in a single cycle (starting the generator is not needed), ten cycles were applied in all simulations; thus, the obtained results are the average values of the equivalent fuel consumption rate and the overall efficiency. The other performance factors were not influenced by the applied cycle; they depended only on the powertrain components.
As stated, six types of series HEVs and six parallel HEVs were configured through the combination of the three engines with the two electric motors.
Table 1 shows the results of the simulations for the series HEVs, and
Table 2 shows those of the parallel ones.
Some essential conclusions can be drawn based on the data in
Table 1 and
Table 2. The series hybrid vehicles had a lower performance than the parallel ones. Using the same engine and electrical motor to configure series and parallel hybrid vehicles and considering different drive cycles, the equivalent fuel consumption rate was usually higher in the case of the series hybrid. Only in the cases of HS4 and HP4 was the fuel consumption rate lower for the series HEV. Also, for HS1 and HP1, in the UDDS cycle, the fuel consumption rate was the same. We can conclude that the overall efficiency was better in HS1 versus HP1, but the fuel consumption rate was the same because of the greater mass of the series model. All dynamic performances, such as the times needed to reach different speeds, as well as the maximum speed that the vehicle can reach, were lower in the case of the series hybrid vehicles. Finally, it is emphasized that the gradability was greater in the parallel hybrid type, which is also a big advantage.
In the case of the series hybrid vehicles, the performance depended directly on the electric motor. A more powerful motor led to a better dynamic performance of the vehicle and gave it the ability to run on a steeper ramp at a certain speed. For the same electrical motor and generator, in the case of the series hybrid vehicles, the performance and gradability also depended on the engine, but more so on the combination engine–motor. Sometimes, a powerful engine will offer a better performance, but not necessarily a higher equivalent fuel consumption (see HS1 versus HS2). In fact, in this case, the better efficiency of the 50 kW engine is highlighted. It is more important how the motor and engine are chosen. In this sense, when comparing the HS2 and HS3 models, with approximately the same performances, a much lower fuel consumption rate can be observed in both considered cycles. This also happened for HS4 and HS5. For all the series HEVs, the better engine (considering the performance/consumption ratio) was the 50 kW engine.
By analyzing only the series HEVs, two of the considered models seem to be the best solutions, depending on whether the designer wants a dynamic performance or a low fuel consumption. If dynamic performance is the priority, HS2 offers this (closer to the best) at a lower fuel consumption rate. In this case, the 50 kW engine and 124 kW induction motor, which is more powerful, are combined. If low fuel consumption is the priority, HS5 is the best solution, with a 50 kW engine and a 49 kW PM synchronous motor. All series HEVs had a lower fuel consumption rate in the UDDS cycle, with the exception of HS2, which had a slightly higher consumption in this cycle.
In the case of the parallel hybrid vehicles, things were a little different. By keeping the same electric motor, but choosing a more powerful engine, all the dynamic characteristics of the car were better (in the groups comprising HP1–3 and HP4–6). What must be highlighted, however, is that keeping the same engine and using a more powerful electric motor does not imply superior vehicle performance (e.g., HP1–3 versus HP4–6). The better dynamic performances of the HP4–6 group compared to the HP1–3 group can be explained by the difference in mass (31 kg) between the two groups, given that the maximum continuous torques of the two electric motors are close (274 and 271 Nm, respectively).
The HP6 model, followed by HP5, ensures the best dynamic performance. While HP6 had a high fuel consumption, HP5 had the lowest consumption. Again, the combination of the 50 kW engine with the PM synchronous motor offers the best solution regarding fuel consumption, as well as a good solution regarding dynamic performance. This is due to the fact that the PM (permanent magnet) electrical motor has higher efficiency than induction motor, the weight of the model is almost the lowest, and the engine has the best efficiency. All parallel HEVs had a lower fuel consumption rate in the NEDC cycle (only HP3 had the same). This is the reverse of the series HEVs. The parallel models had a better dynamic performance and a lower fuel consumption rate, except for the HP4 and HS4 models.
Regarding the HEVs, a strong point of this study is that it points out the fact that, although the HP4–6 group had a lower installed power compared to the HP1–3 group, the dynamic performances were all better at a lower fuel consumption rate. The correlation between the electric motor and the engine is essential in the case of HEVs.
Next, we wanted to compare these results with the case of CVs.
Table 3 shows the results for these models.
The CV3 model ensures the best dynamic performance in the case of CVs. This performed better than the series HEVs (only HS3 had a greater gradability) and worse than the parallel ones. The fuel consumption rate was similar to that of HS1, but slightly lower. Thus, if the dynamic performance is considered, this model is better than any of the series HEVs. Series HS1—3 group had a close dynamic performance, but only HS2 had a lower fuel consumption rate. If only fuel consumption were considered, the CV2 model would be the best. It had the lowest consumption rate of all the studied models in the considered driving cycles. Also, its overall efficiency was the best and comparable with that of the HP5 model. However, if we consider the cost at which the dynamic performances were obtained (fuel consumption relative to performance), then the best model is the HP5 model. The CV2 model had dynamic performances very near to that of HS4—6 group, but the fuel consumption was much lower than that of the models in this group. Therefore, it seems that in the case of small vehicles, the series architecture is not favorable. The price of HEVs is higher than that of CVs, and the negative effect on the environment in the production process is also higher. Of course, having a higher fuel consumption means, in the end, a more pronounced negative effect on the environment.
By comparing HP5 with CV2, the following can be highlighted: increases in the consumption of 18% in the UDDS driving cycle and 13% in the NEDC cycle; a reduced time to reach 100 km/h of 56.2%; a reduced time to reach 100 km/h from 65 km/h of 54.5%; a reduced time to reach 137 km/h of 50.4%; an increase in the maximum acceleration of 61%; and an increase in the gradeability at 80.5 km/h of 65%. The overall efficiency was the same in the UDDS cycle and 98% in the NEDC cycle. Thus, it should be emphasized that, in the case of small cars, the parallel architecture offers the best dynamic performances. This architecture also ensures a very good ratio between the dynamic performances and the fuel consumption rate.
It can be seen in
Table 2 that the HP5 and HP3 models had very similar dynamic performances. The major difference was in fuel consumption, with the HP5 model being better. The HP6 model offered the best dynamic performances, but with a high fuel consumption rate. The increase in fuel consumption was much greater than the improvement in its dynamic performance. Finally, considering all models, the HP5 model offered the best performance/fuel consumption ratio.
A detailed comparative analysis of the gas emissions was not conducted in this study, but it was specified that, in the case of CV3, in the UDDS/NEDC cycles, they were as follows (in g/km): 0.086/0.087 of HC (hydrocarbon), 0.327/0.334 of CO (carbon monoxide), and 0.069/0.071 of NOx (nitrogen oxides), respectively. Thus, the emissions in the UDDS/NEDC cycles (in g/100 km) are 8.6/8.7 of HC, 32.7/33.4 of CO, and 6.9/7.1 of NOx. If an average of 2.3 kg CO2/L of consumed gasoline is considered, we can estimate the CO2 quantities (in kg/100 km), UDDS/NEDC—15.64/15.87.
These emissions calculated for HP5 (which also had a better dynamic performance than CV3) in the UDDS/NEDC cycles (in g/100 km) are 6.57/6.43 of HC, 25/24.68 of CO, and 5.28/5.25 of NOx. The emissions of CO2 are 11.96 and 11.73 g/100 km for UDDS and NEDC, respectively.
It is important to highlight these factors to derive how many other positive aspects hybrid vehicles have on the environment and our health; the effects are even more accentuated in large urban agglomerations.
Based on the obtained results, some significant conclusions can be drawn:
- ➢
In the case of hybrid small cars, the series configuration usually offers a lower performance than the parallel one, with the same electrical motor and engine combination.
- ➢
The series architecture is not favorable in the case of small cars; a conventional model should be used that offers the same performance or better, has a lower fuel consumption, and, of course, has a lower price.
- ➢
The hybrid parallel offers the best performance for small cars with the same fuel consumption rate. This means that the fuel consumption rate is the smallest for the same performance.
- ➢
A higher total installed power does not necessarily ensure better performance.
- ➢
Besides the mentioned technical–economic advantages, we must highlight the reduced negative effects of high-performance hybrid vehicles on the environment and our health.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}