1. Introduction
Renewable energy sources are becoming more appealing due to environmental issues like climate change, global warming, and the depletion of fossil fuels [
1]. The use of fossil fuels, civilization, and human density are all contributing to the planet’s rapid temperature rise [
2]. To counteract global warming, researchers are looking at renewable energy sources. A viable, noise- and pollution-free alternative is solar energy. To maximize energy conversion efficiency and cut costs, effective strategies are required [
3].
The abundance and environmental friendliness of renewable energy technologies, particularly photovoltaic (PV) energy, have drawn increased attention recently. Temperature and irradiance are two climatic factors that affect photovoltaic system generation [
4]. A control circuit must be inserted to operate the PV panels during the voltage that results in the peak point since the relationship between the PV output voltage and generated power is nonlinear and has only one peak power. This can be achieved by using a DC-to-DC converter controlled by a maximum point tracker (MPPT). The most popular and straightforward MPPT technologies are hill climbing, incremental conductance, and perturb and observe. Nonetheless, there are several drawbacks to employing these conventional technologies, particularly when the PV system is operating in partial shadow, as the power–voltage curve in this scenario has a single global peak and numerous local peaks [
5]. In these conditions, conventional technologies might detect a local peak and interpret it as the global peak. This would result in an increase in the output power loss and a decrease in the use of the PV generator. Thus, to avoid catching the local peak from the system, methods with a strong search ability are crucial. These methods, referred to as global MPPTs.
Optimization algorithms have been used in different applications in addition to the global MPPT. A hybrid optimization method comprising an ant lion optimizer and a neural network was developed by Alblawi et al. [
6] for forecasting the PV cell temperature and output power. To maximize the microgrid resilience, a two-stage AI-enhanced system with an integrated backup system based on a hybrid optimization algorithm has been proposed by Elkholy et al. [
7]. To track the global MPP obtained from the PV system at PSC, a bio-inspired whale optimization approach was introduced [
8]. The approach’s performance was enhanced by reinitializing it. To improve the PV-system-generated power under quickly changing shading conditions, a control scheme representing an MPPT integrated between a fractional P&O tracker and fractional proportional–integral controller has been established in [
9].
Additionally, the hunter–prey optimizer was used to determine the settings of the controller that was supplied. The authors of [
10] presented a modified version of the tunicate swarm method to improve the PV system performance by tracking the global MPP. Two random integers were added to the method throughout its update process to improve the search functionality. By comparing the expected peak with the global peak, a tracker based on the fly search agent approach has been given to detect the global peak of the PV system during shading circumstances [
11]. To evaluate the created tracker, benchmark shading patterns have also been examined. An enhanced algorithm that is accessible during abrupt weather changes has been introduced to address the long-term tracking issue related to the usage of the conventional power feedback approach in determining the maximum power from PV modules/arrays [
12]. Eltamaly [
13] proposed a new global MPPT method using a musical chairs algorithm for MPPT PV applications. The results demonstrated that the convergence time was decreased to 20–50% of those attained by another benchmark algorithms.
Typically, parallel connections between the PV module and switched bypass diodes are possible. Normal circumstances have no effect on these diodes [
14]. When shadowing occurs, the bypass diodes become backward biased and transmit the current rather than the PV module. Because of this, a PV system’s power–voltage curve under partially shadowed conditions has a single global point and multiple local MPPs. Therefore, it is imperative to track such a global maximum point. Consequently, under shading, the efficacy of conventional MPPT techniques is diminished [
15]. The distinction between the global and local peaks cannot be made using conventional MPPT techniques, such as hill climbing and incremental conductance. Therefore, the effectiveness of tracking MPP under shading is lowered as a result. To extract the global MPP in this scenario, several global MPPT approaches based on modern optimization have been devised. Among these algorithms are the following: the grey wolf optimizer [
16], hybrid cuckoo search and artificial bee colony [
17], mine blast optimization [
18], and teaching–learning-based optimization [
19].
Therefore, in this paper, a single-sensor global MPPT based on the recent red-tailed hawk (RTH) algorithm for a PV system interconnected with a DC link operating under PSC is presented. To prove the superiority of the RTH, the results are compared with another ten algorithms including bald eagle search (BES), modified bald eagle search (mBES), the blue monkey algorithm (BMA), the black widow optimization algorithm (BWOA), greylag goose optimization (GGO), the grey wolf optimizer (GWO), Harris hawks optimization (HHO), the pelican optimization algorithm (POA), particle swarm optimization (PSO), and the whale optimization algorithm (WOA). Three shading scenarios are considered, with the idea of changing the shading scenario to change the location of the global MPP to measure the consistency of the algorithms.
2. PV Array under Shading
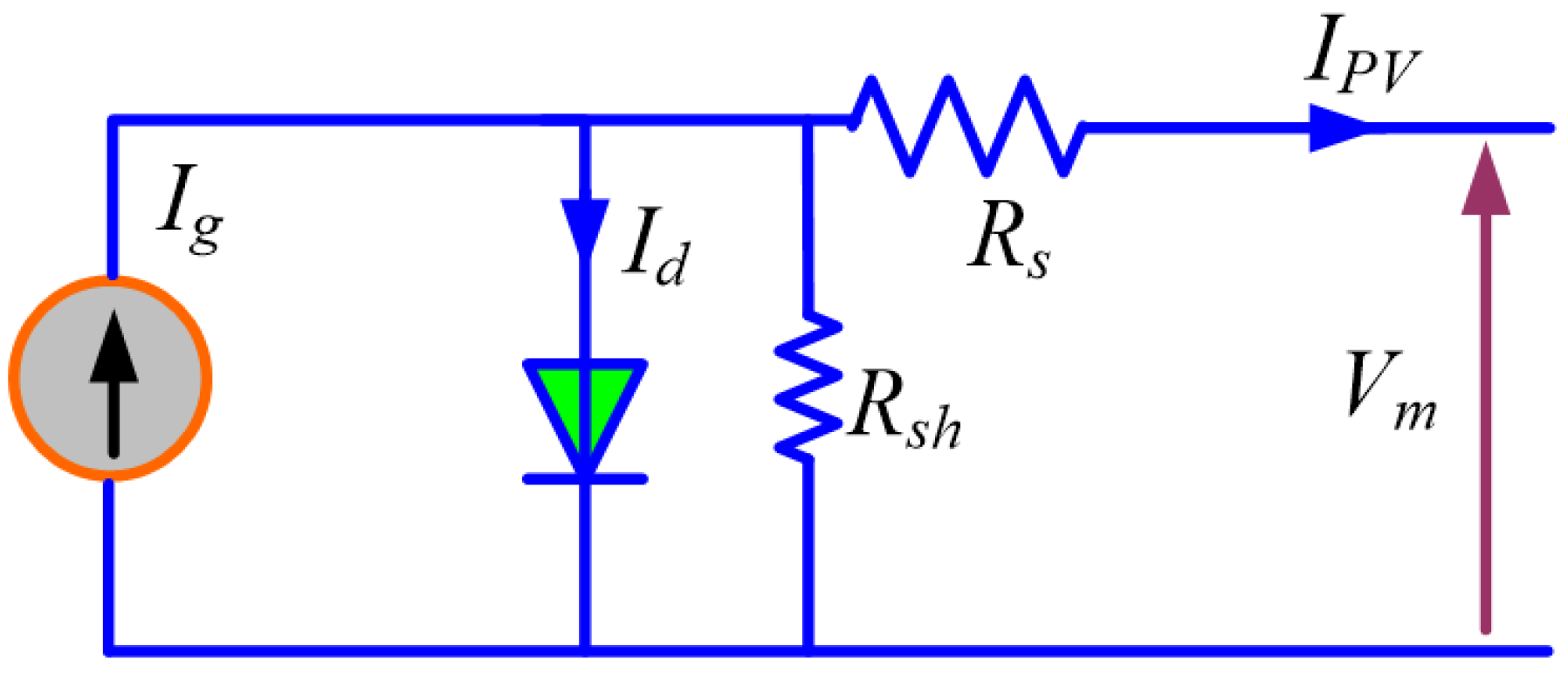
A single-diode model circuit is explained in
Figure 1. The output current of the PV module is defined using the following relation [
20]:
where
presents the generated photo-current;
presents the reverse saturation current;
q presents the electron charge;
and
present the output current and the voltage of the solar cell, respectively;
presents the ideality factor of the parallel diode and depends on the semiconductor device;
K is the Boltzmann constant; and
and
are the series and shunt resistances, respectively.
Figure 1.
Solar cell single-diode model.
Figure 1.
Solar cell single-diode model.
The photon current relies on the intensity of the solar radiation and temperature. The following formula is used to calculate it [
20]:
where
is the short-circuit current;
and
are the temperature and irradiance at STC, respectively;
is the ambient temperature;
G is the ambient irradiance; and
presents the current temperature coefficient.
Partial shadowing is a frequently anticipated event for large-scale photovoltaic systems. The shade from surrounding trees, structures, birds, or bird droppings is a major problem that affects the operation of PV systems [
20]. One of the main factors reducing the PV system’s output power is shadowing, whether it is full or partial. PSC happens when shadows cast by other PV modules, buildings, clouds, or even other PV modules themselves cover the modules. Bypass diodes can be used to mitigate the shade temporarily and shield the PV system from malfunctioning. A diode can be used to provide an additional path for the PV current to follow when a cell is broken or shaded [
21]. It will barely affect the panel’s power and totally bypass any broken or darkened cells. To reduce the risk created by the hot-spot phenomenon, one or three bypass diodes are often attached per module [
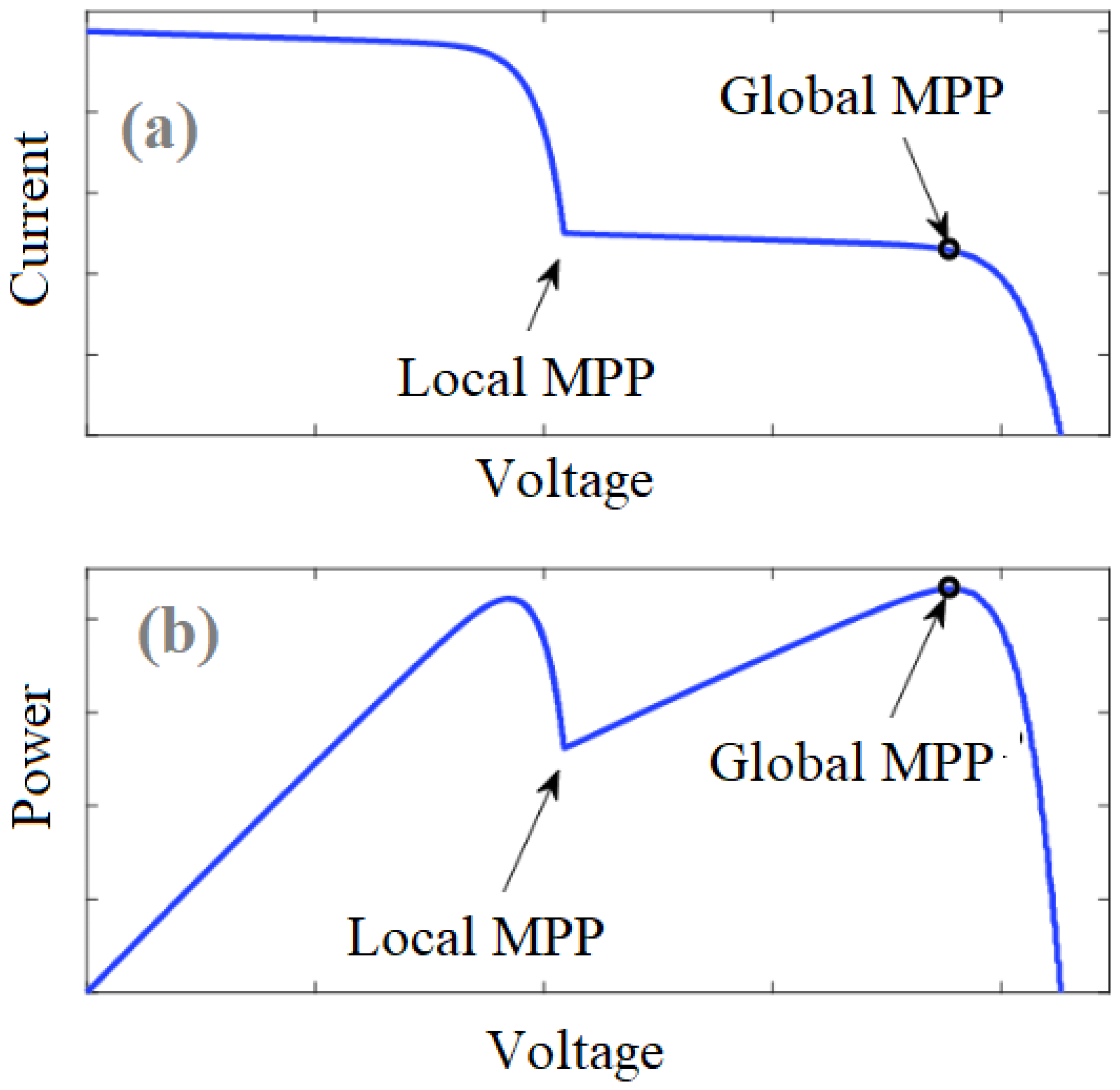
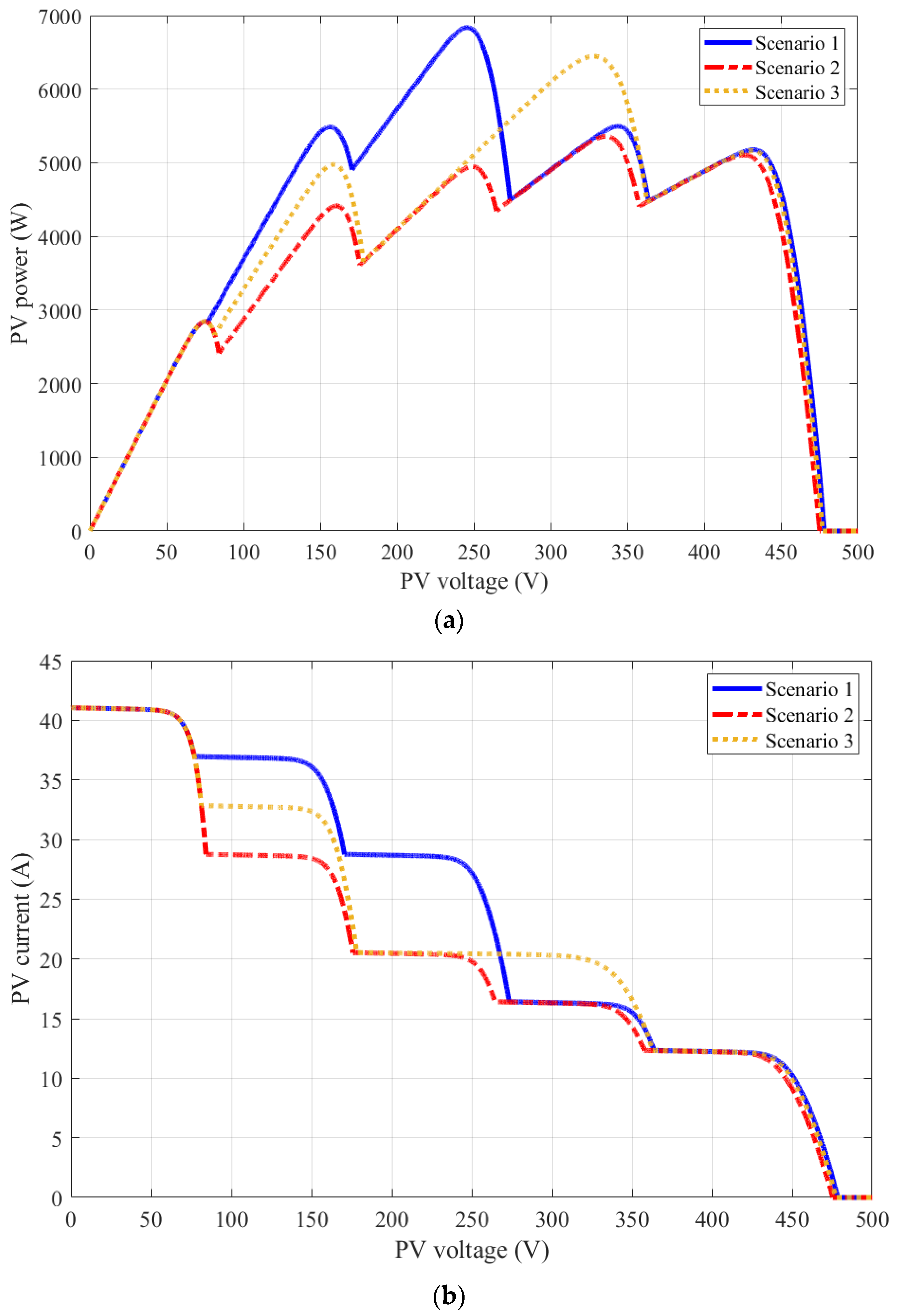
22]. The power against voltage curves of the PV array at the normal distribution of solar radiation and under shading are demonstrated in
Figure 2. When the PV array operates at the normal distribution of solar radiation, its P–V curve has one MPP. This point can be easily obtained by any convention MPPT method. On the other side, at a partial shade operation, the P–V curve has several peaks. Global MPP can be tracked through installing MPPT based on modern optimization algorithms [
23].
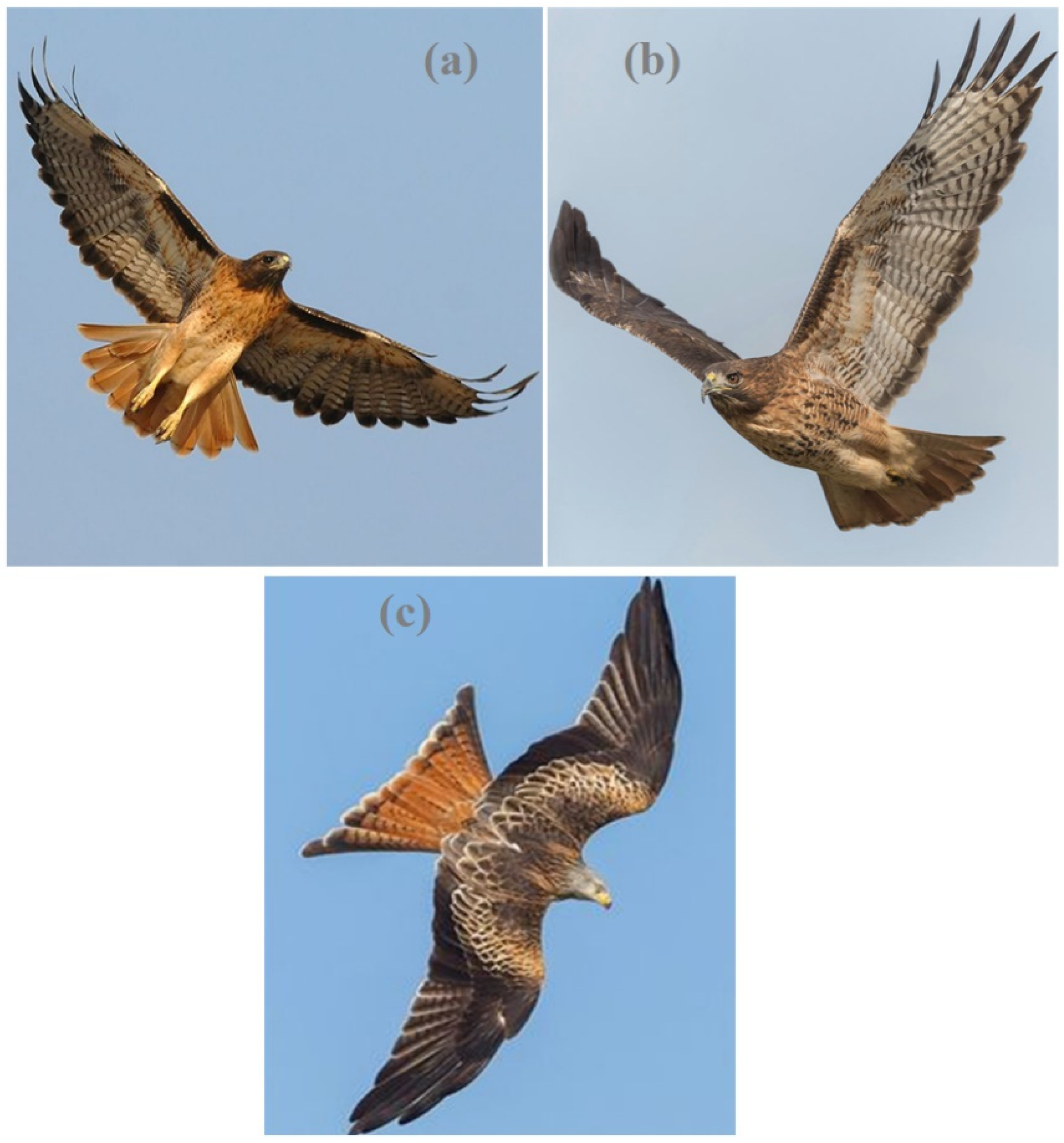
3. Red-Tailed Hawk Algorithm
RTH is a recent optimization method that simulates the hunting behavior of red-tailed hawks. There are three essential phases of hunting as explained in
Figure 3: the high-soaring, low-soaring, and swooping phases [
24].
- 1.
The first phase (high-soaring): In this phase, the RTH is soaring high into the sky but far away from its target. This phase can be modeled as follows [
24]:
where
x(
k) is the new location,
xG is the best location, and
xav is the average of all locations.
TF(
k) is the transition factor function. The levy flight distribution and
TF may be estimated using (5) and (6):
where
and
are constants; and
and
denote randoms.
where
Tm denotes the maximum number of iterations.
- 2.
The second phase (low-soaring): The hawk comes much nearer to the prey. Considering a spiral movement for surrounding the prey, the new location can be defined as follows [
24]:
A0 denotes the initial value of the radius that varies;
denotes the angle gain that varies;
denotes a random number;
g is a controlling factor.
- 3.
The third phase (stooping and swooping): The hawk rapidly drops its body to attack the prey. The modification of the location in this phase can be defined as follows [
23]:
The steps’ sizes can be obtained according to the following:
where
α and
G denote the accelerating and gravitational parameters, respectively.
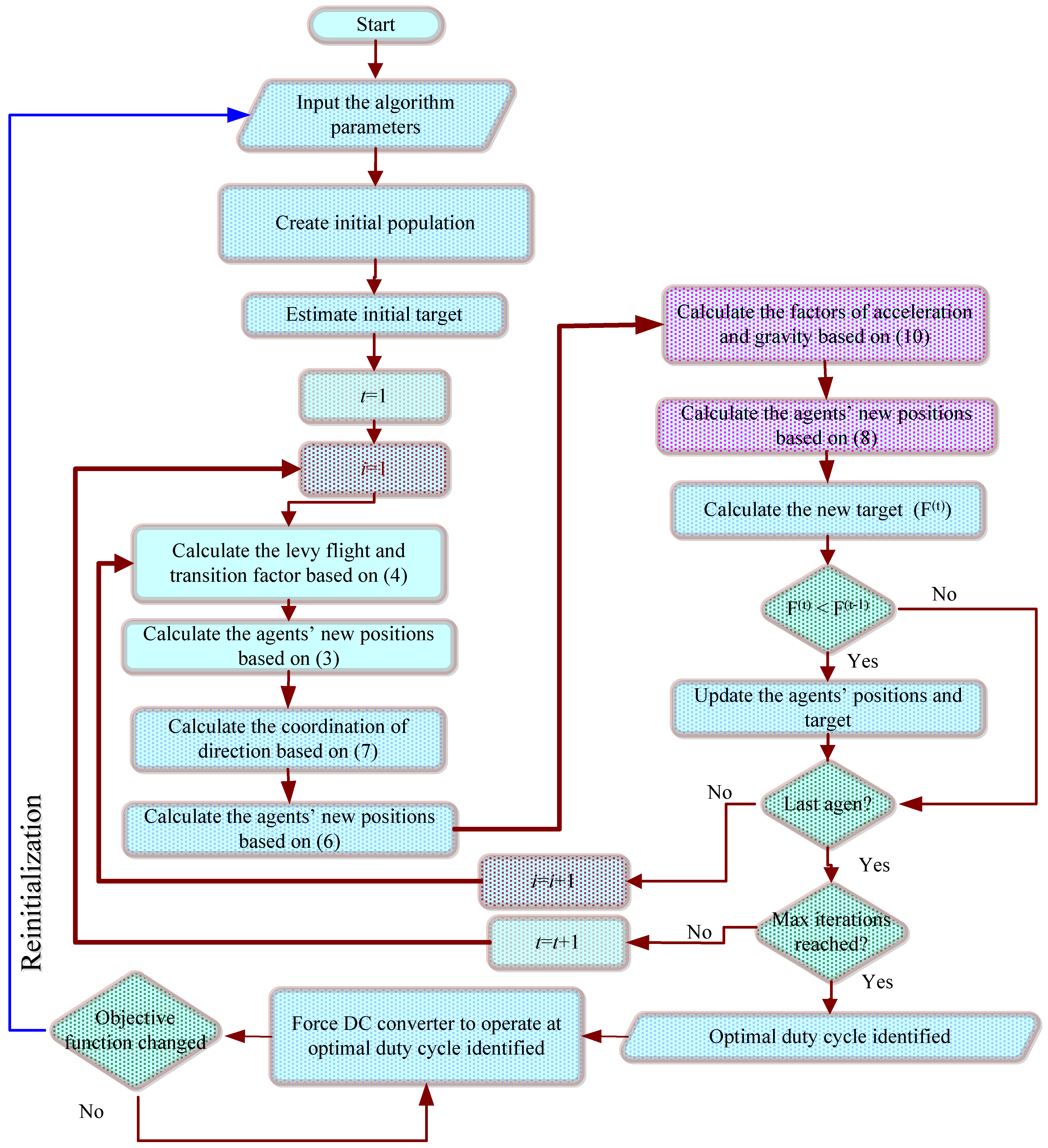
The steps of RTH-based MPPT is explained in
Figure 4.
4. Results and Discussion
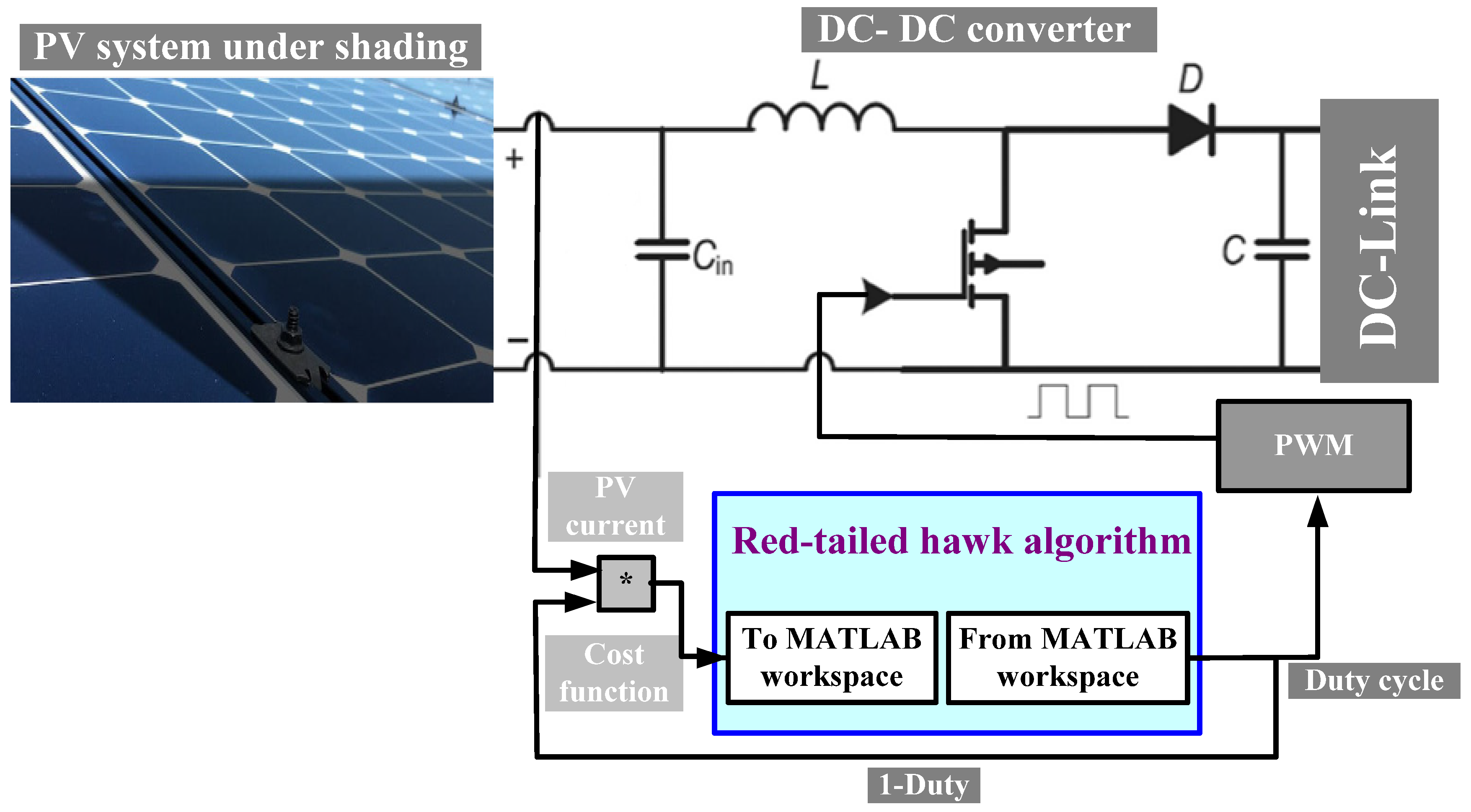
The PV system interconnected with the DC link is explained in
Figure 5. The PV-BES includes 75 PV modules with a 15-kW total capacity, forming five arrays (three strings with five series-PV modules), a DC boost converter, MPPT, and a 480 V DC link. The nominal power of one PV module is 200 W at the maximum power point (MPP) with 7.61 A and 26.3 V.
Table 1 summarizes the PV-BES characteristics.
The duty cycle (
d) of the DC boost converter regulates the PV voltage and, consequently, the PV power. It can be represented by the following relation:
where
and
denote the voltage of the system
PV and voltage of the
DC link, respectively.
Therefore, the
PV voltage can be expressed in terms of the voltage of the
DC link as follows:
Based on the previous equation, with a constant BES voltage, the
PV voltage directly depends on the value (1 −
d). Consequently, instead of using a sensor to measure the
PV voltage, the value of (1 −
d) may be used. Accordingly, the objective needed to be maximized is formulated as follows:
where
Ipv presents the output current of the
PV. The duty cycle is designated to be the outcomes parameter throughout the optimization procedure.
To evaluate the performance of global MPPT based on the RTH, three shading patterns are taken into consideration.
Figure 6 and
Table 2 show the voltage, power, and current graphs under the considered shading patterns. Changing the shading pattern is considered to vary the position of the global MPP to evaluate the reliability of the proposed global MPPT based on the RTH.
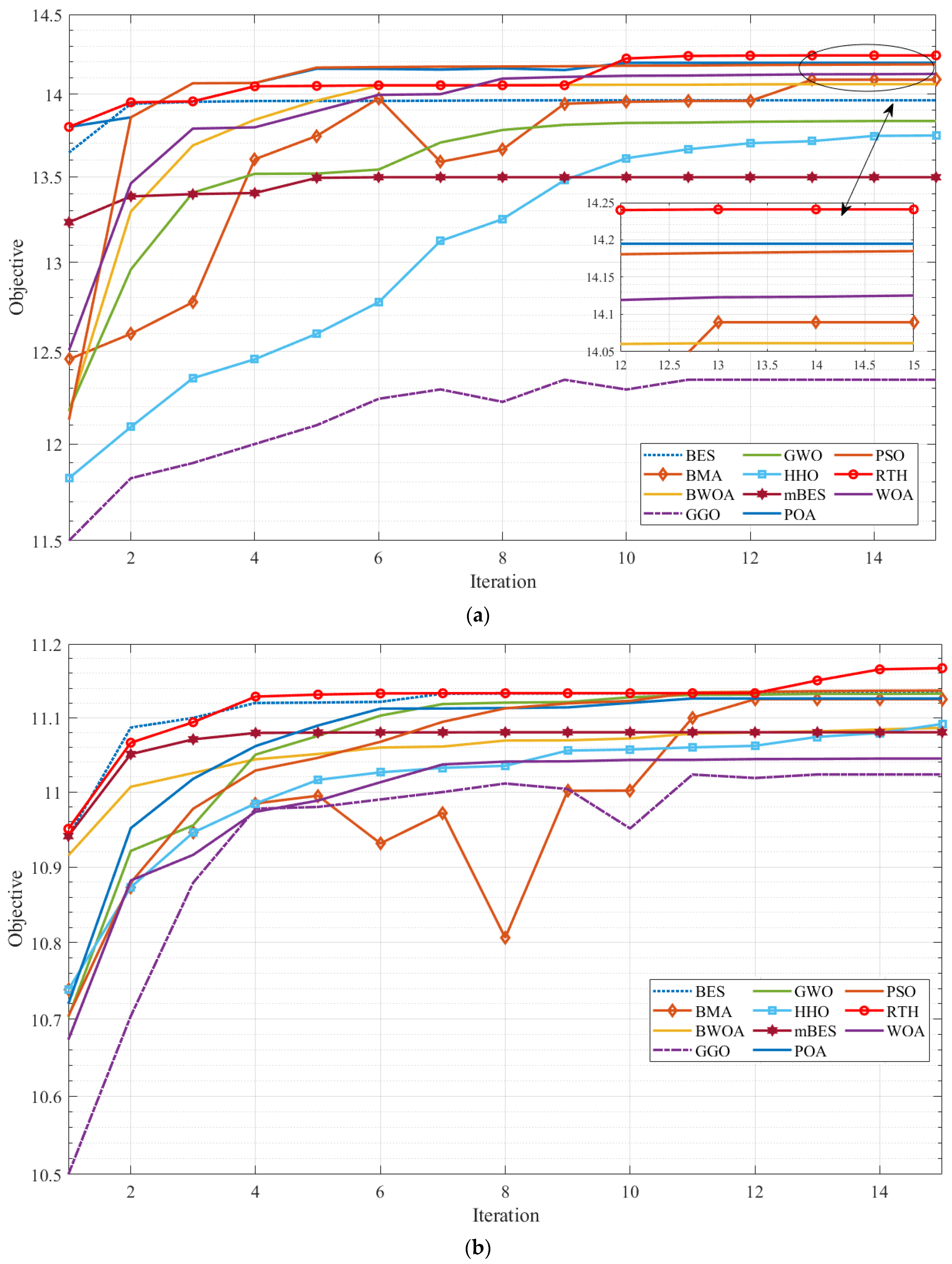
To ensure fairness in the comparison, the total number of communities (5) and repetitions (15) were fixed across all algorithms. Throughout the optimization procedure, the result of the solar power current and (1 − d) was utilized as an indicator of the costs, which was increased. To demonstrate the reliability of the proposed global MPPT based on the RTH, all optimizers were implemented for 30 runs.
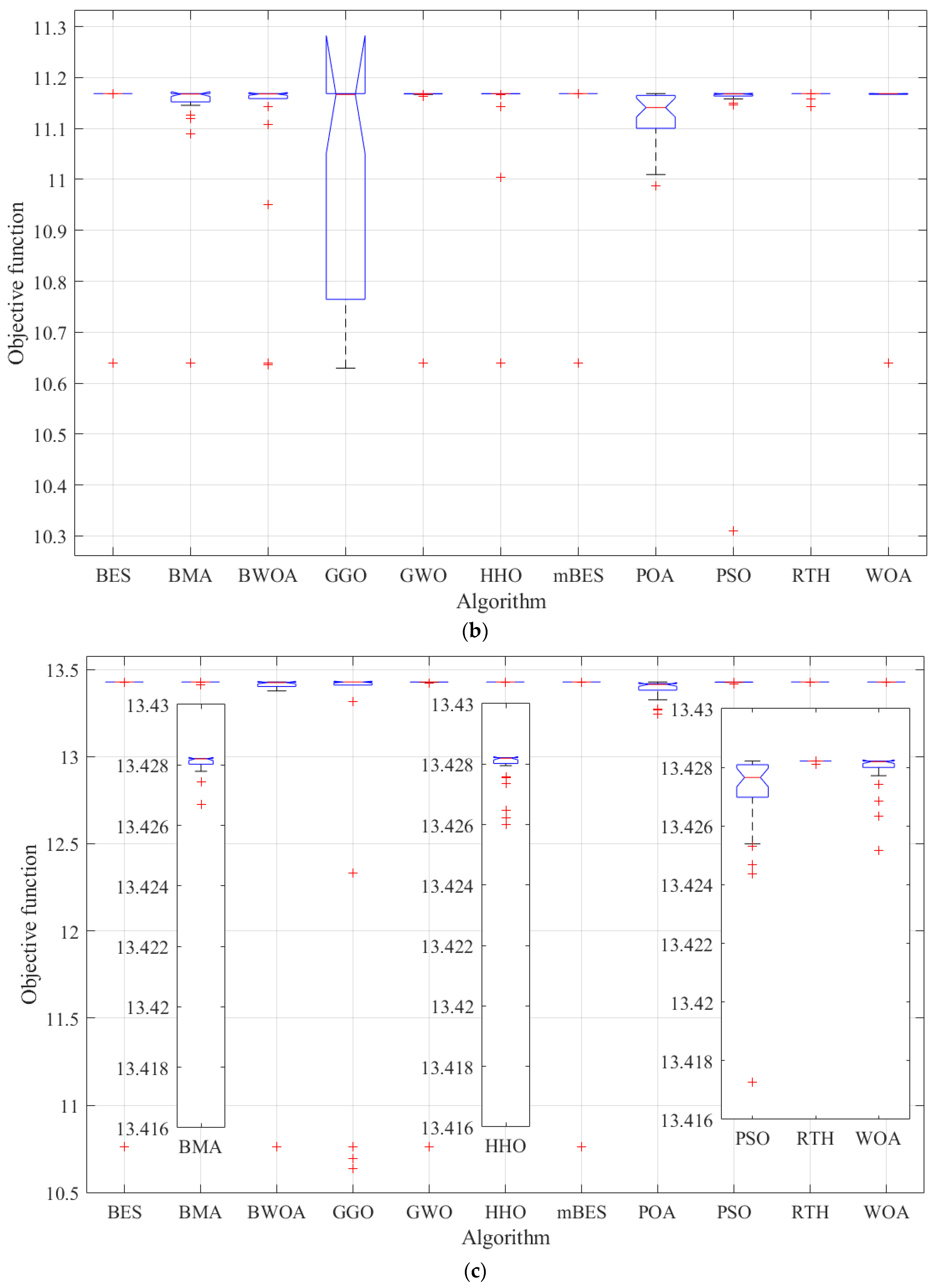
Table 3 shows the empirical evaluation of the investigated algorithms. The details of the 30 runs for the first, second, and third shading scenarios are presented, respectively, in
Table 4,
Table 5 and
Table 6.
Considering
Table 3, the proposed global MPPT based on the RTH has the highest performance compared with other optimizers. For the first shading situation, the mean PV power values varied between 6835.63 W and 5925.58 W. The RTH reaches the highest PV power of 6835.63 W flowing through PSO (6808.64 W). GGO achieved the smallest PV power production of 5925.58 W. The STD numbers range from 1.89 × 10
−7 to 1.234. The RTH has the smallest STD at 1.89 × 10
−7, followed by the POA with the lowest (0.042). The worst value of the STD of 1.234 is obtained by mBES. In the second shading situation, the mean PV power levels varied between 5360.24 W to 5291.28 W. The RTH achieves the maximum PV power of 5360.24 W, followed by PSO (5345.62 W), whereas the minimum PV power of 5291.28 W is obtained by GGO. The STD values varied between 0.005 and 0.225. The RTH has the lowest STD of 0.005, after the POA (0.051). GGO obtains an unacceptable STD of 0.225. For the third shading circumstance, the average PV power output varied from 6445.54 W to 6208.9 W. The RTH generates the highest solar energy output of 6445.54 W, which is followed by the WOA (6445.39 W), while GGO has the lowest PV power of 6208.9 W. The STD values varied between 2.12 × 10
−5 and 1.009, while the minimum STD of 2.12 × 10
−5 is reached by the RTH, followed by the WOA (0.001), with GGO achieving the lowest STD score of 1.009.
Figure 7 depicts the fluctuation in the average cost function during the optimization phase for the three shading schemes.
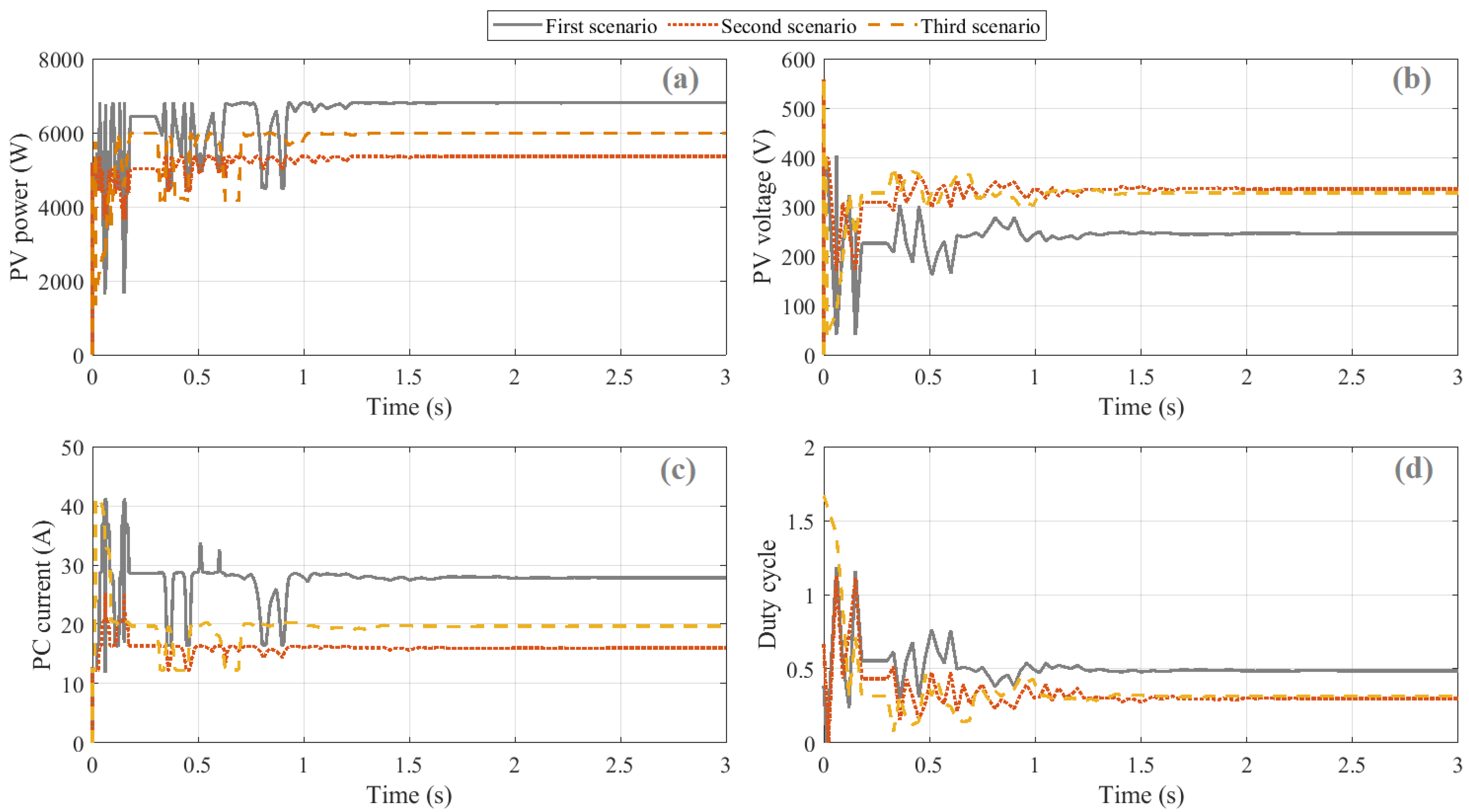
Figure 8 shows the dynamic response of the PV system using the RTH under different scenarios.
Table 7 presents a comprehensive analytical study using the ANOVA test to assess the performance of each optimizer. In this test,
DF represents the degree of freedom,
SS represents the sum of squares,
MS represents the mean squared error (=
DF/
SS),
F represents the ratio of the mean squared errors, and
P represents the likelihood that the calculated test statistic can assume a value greater than the test statistic itself. The
P value is considerably less than the
F value for each case, indicating that the column values, which comprise the mean values, are substantially distinct. Simultaneously,
Figure 9 provides a visual depiction of the rankings, thereby validating the RTH algorithm with remarkable stability and precision.
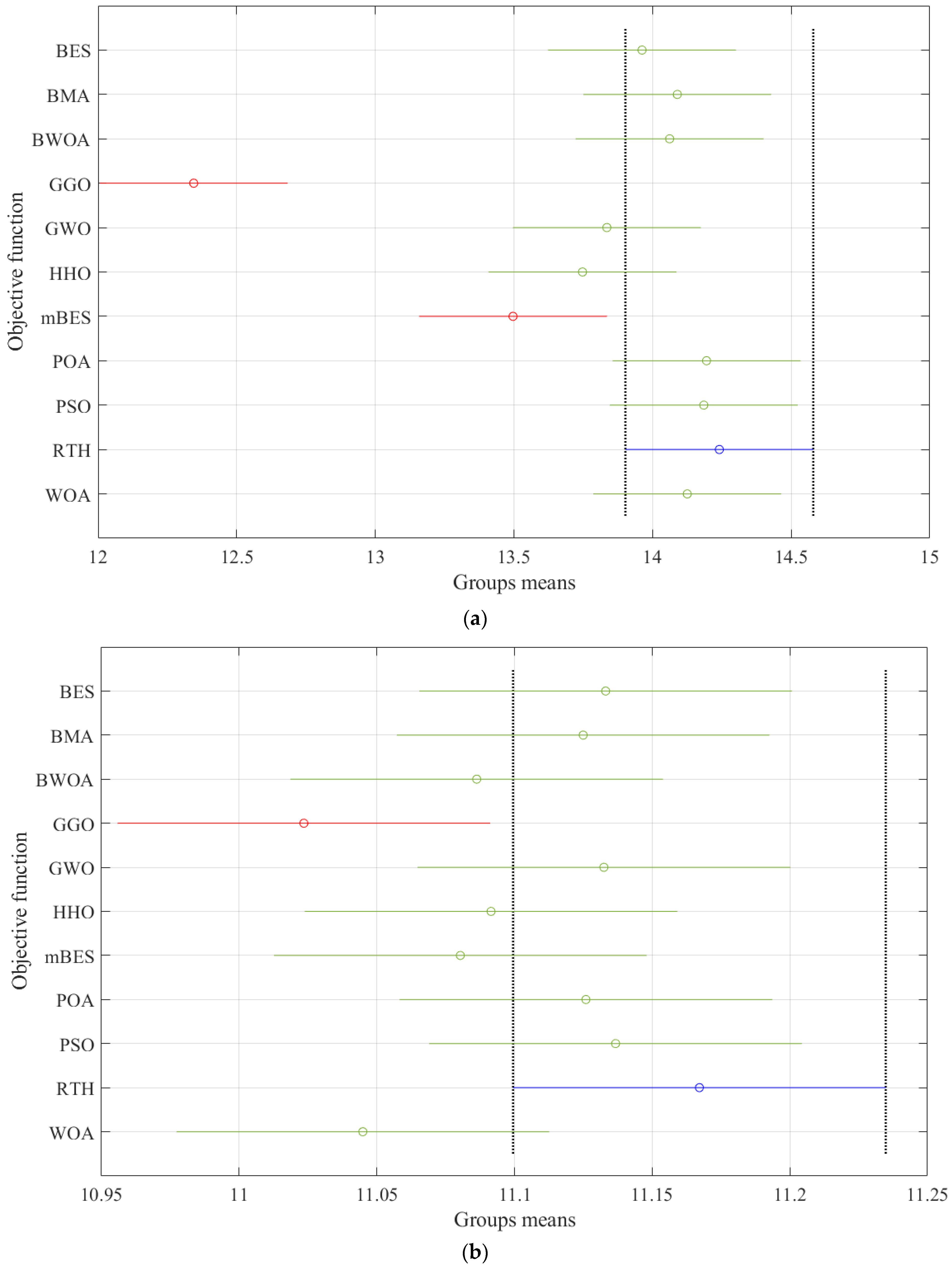
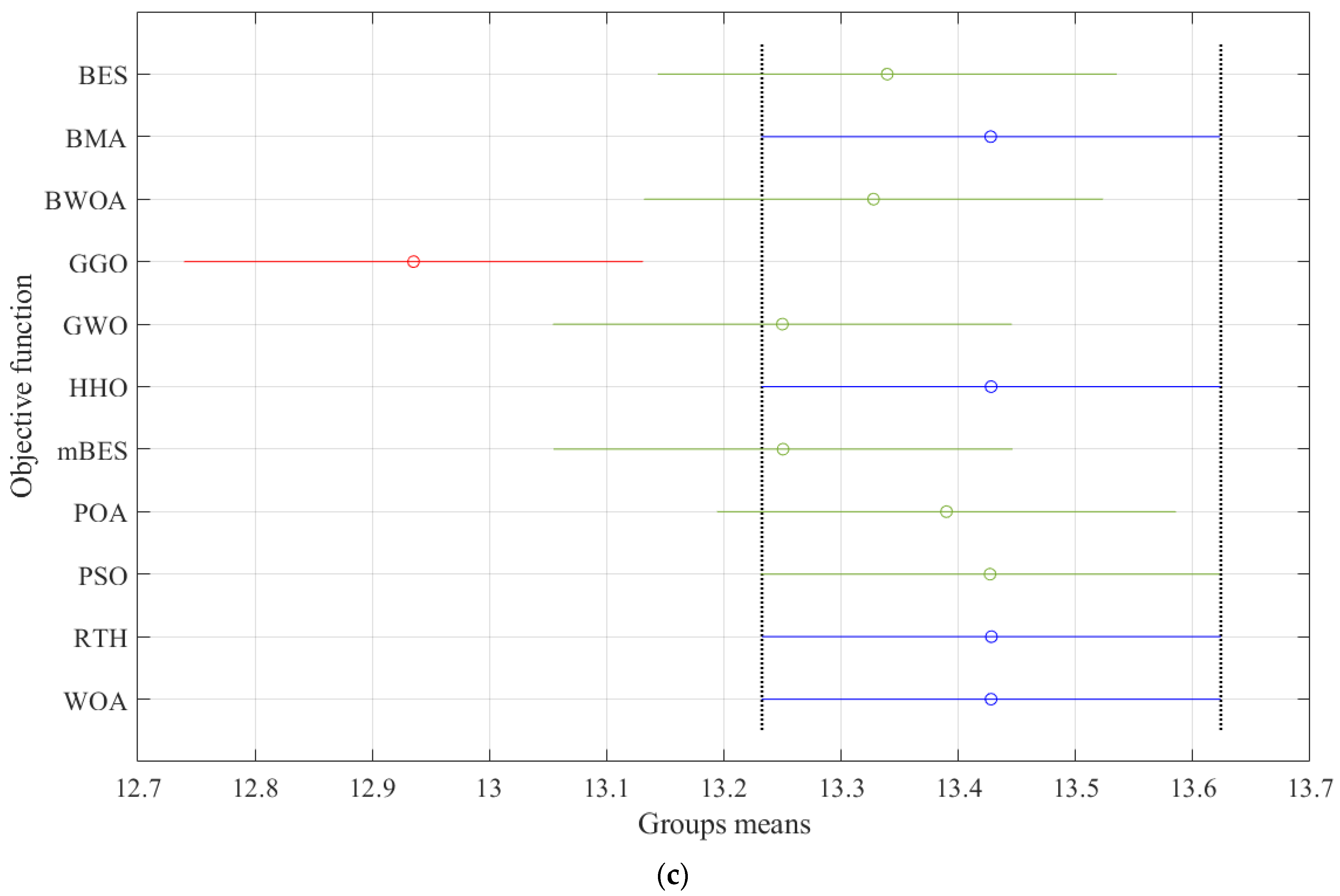
To back up the ANOVA findings, a Tukey Honest Significant Difference (Tukey HSD) post hoc evaluation was carried out.
Figure 10 illustrates the results for the first, second, and third shading situations. The RTH has the greatest meaning compared with other algorithms. As demonstrated in
Figure 10a, for the first shading scenarios, the lowest performance is obtained by GGO and mBES. For the second shading scenarios as shown in
Figure 10b, the lowest performance is also obtained by GGO.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}