
Prediction Method of PHEV Driving Energy Consumption Based on the Optimized CNN BiLSTM Attention Network


Abstract
1. Introduction
- The proposed vehicle energy consumption prediction model, OCBA, does not necessitate the provision of accurate powertrain parameters and efficiency or power loss maps by vehicle manufacturers, thereby enhancing the efficacy of current energy consumption prediction models.
- Our proposed vehicle energy consumption prediction model, OCBA, is independent of vehicle manufacturers in providing models for PHEV energy management strategies.
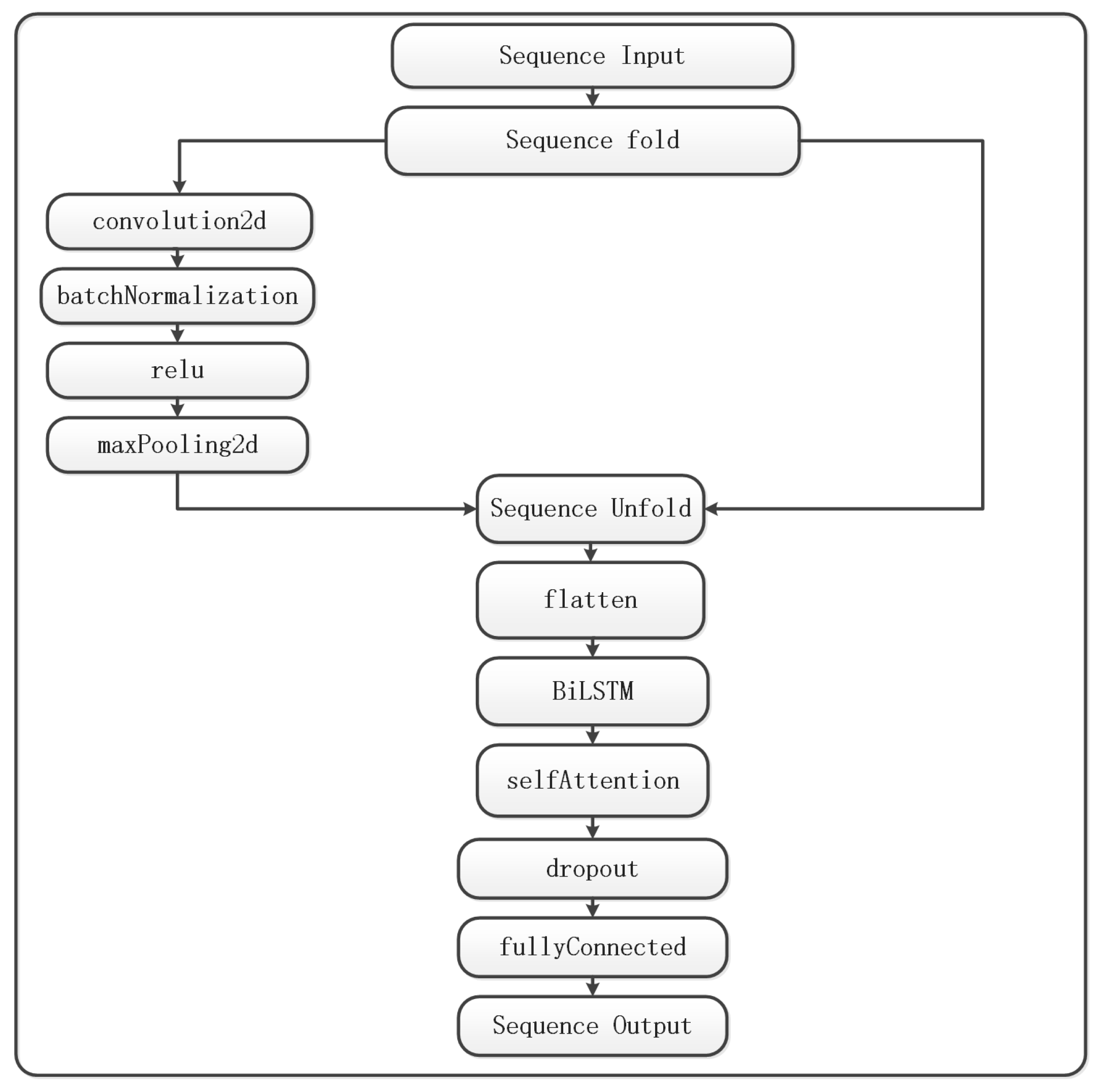
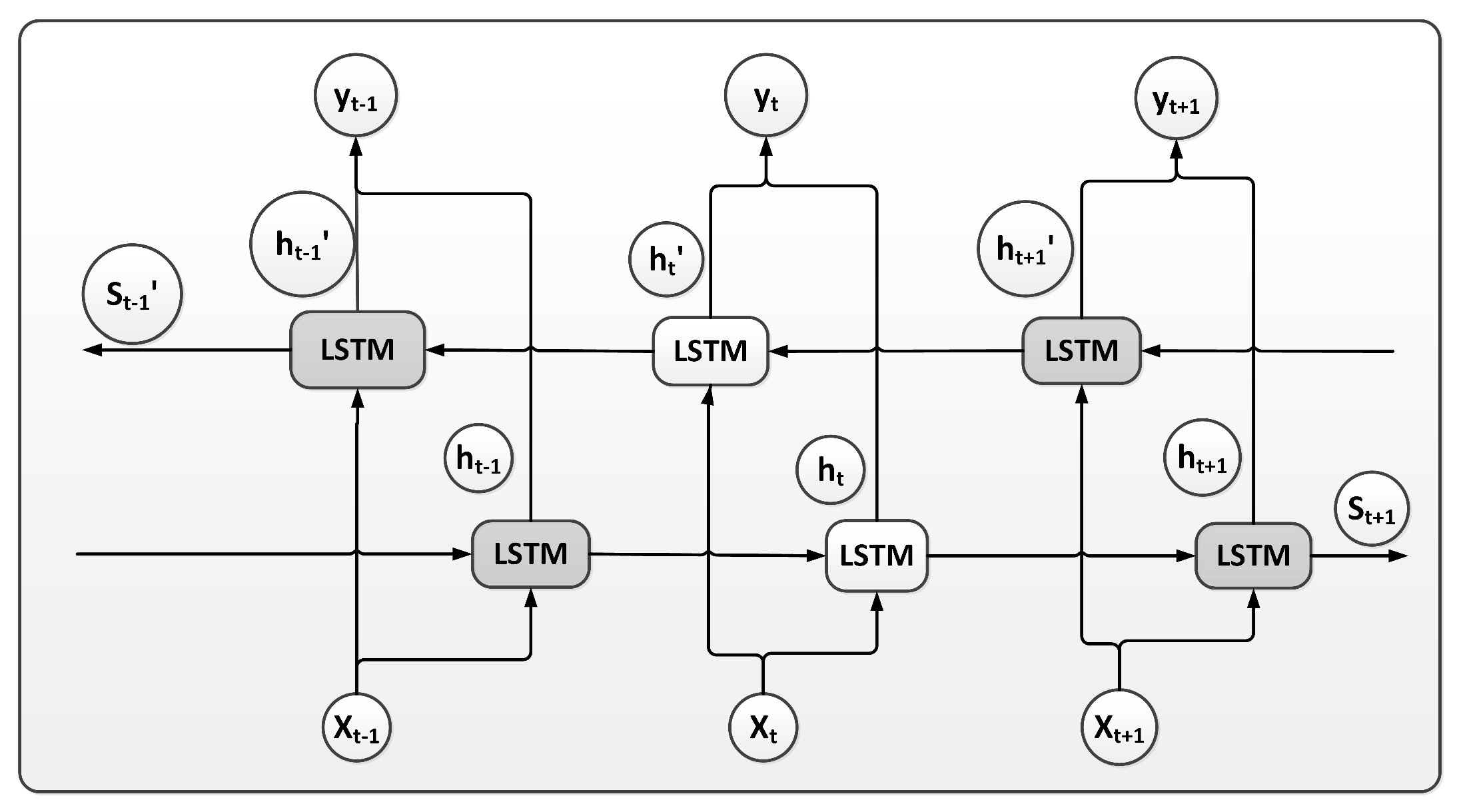
- The proposed vehicle energy consumption prediction model, OBCA, is based on the learning of empirical data collected from vehicles and is trained using optimized convolutional neural networks (CNNs), bidirectional long and short-term memory (BiLSTMs), and attention mechanisms. The results of experiments demonstrate that OBCA has a higher prediction accuracy compared to other commonly used methods.
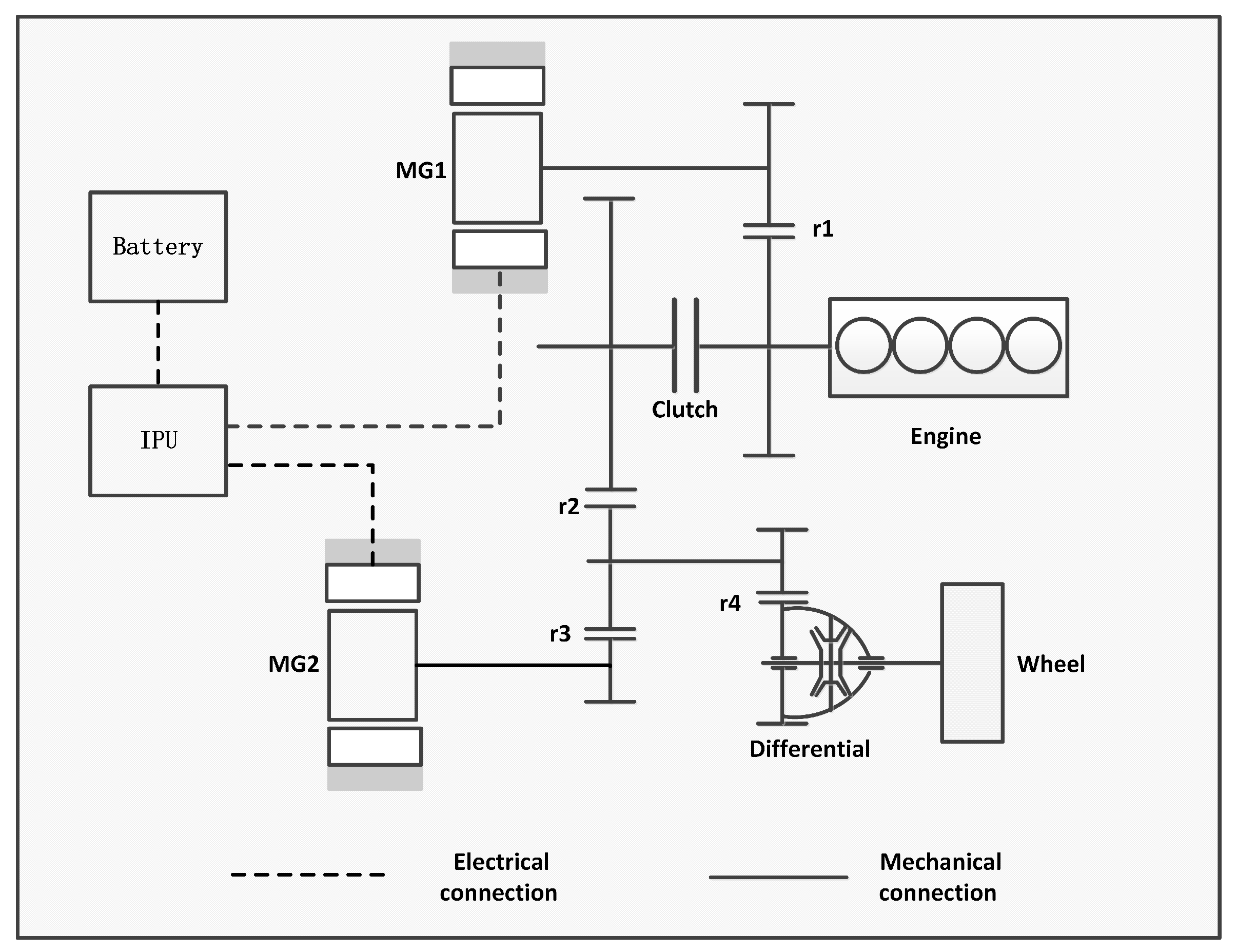
2. Vehicle Configuration and Physical Model
- (1)
- When the clutch is disengaged, the engine and generator disconnect from the transmission system, and the vehicle is driven directly by the drive motor. If the drive motor’s electrical energy is derived exclusively from the power battery, the vehicle operates in pure electric mode. Conversely, if the engine drives the generator to provide electricity in conjunction with the battery, the vehicle operates in series drive mode.
- (2)
- When the clutch is engaged, the engine/generator and transmission system connect mechanically to jointly drive the vehicle, providing power through the motor.
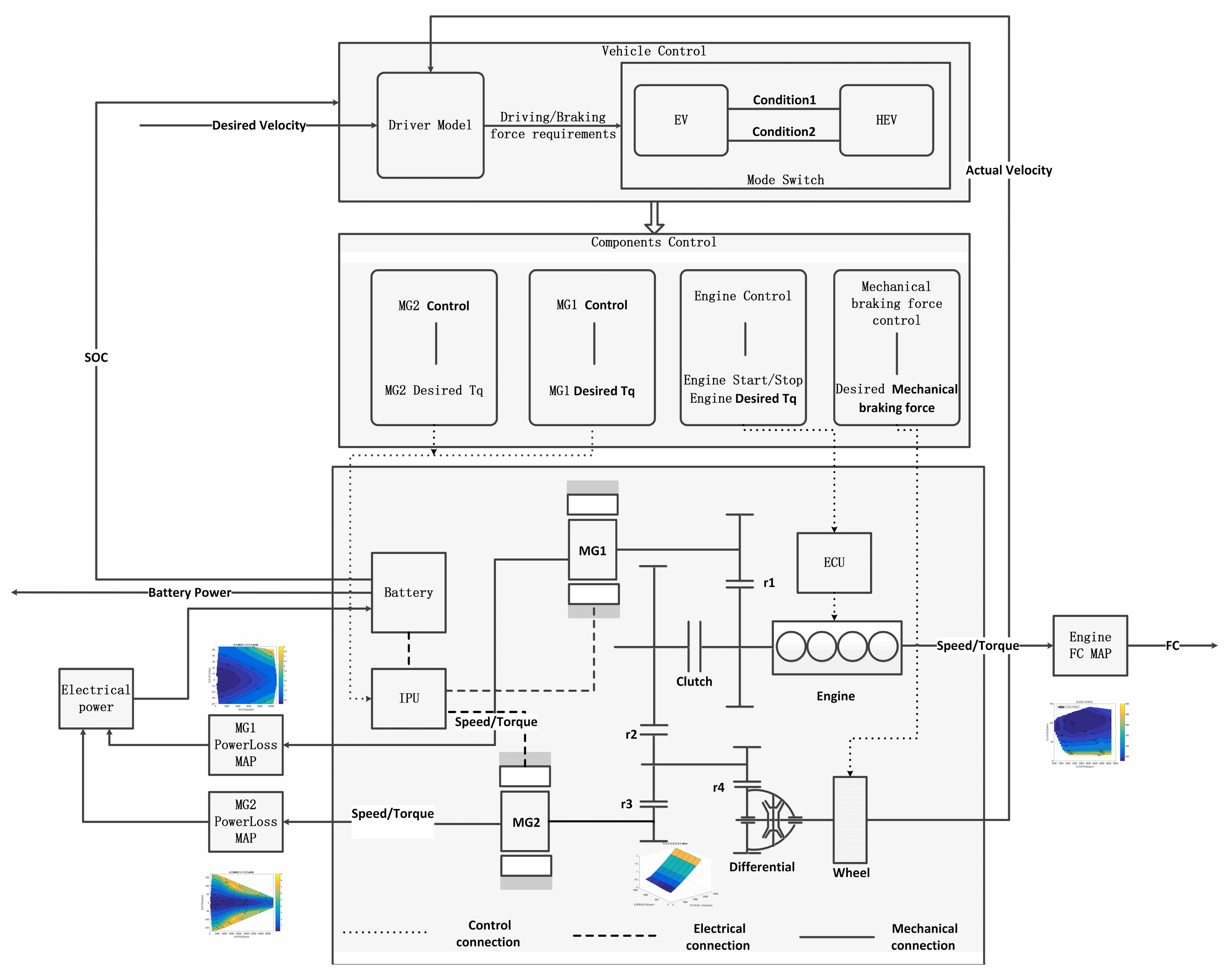
- (1)
- Driver model: This model is used to follow the expected vehicle speed.
- (2)
- Vehicle energy management strategy model: This model is used to calculate the expected driving mode and allocate the expected torque of components.
- (3)
- Component control model: This model is used to limit the expected torque of components within a reasonable range.
- (4)
- Power system model: The model is employed to simulate the motion relationship of the vehicle transmission system, including gear transmission efficiency, transmission ratio relationships, and so forth. It is then used to transmit the component torque to the wheels in order to form driving force.
- (5)
- Vehicle resistance model: This model is employed to simulate vehicle driving resistance, including wind resistance, rolling resistance, mechanical resistance, and so forth. It is then used to calculate vehicle acceleration with driving force.
- (1)
- A large number of parameters for the entire vehicle and powertrain components are required, necessitating coordination between the vehicle manufacturer and component suppliers, making them difficult to obtain. Additionally, these parameters only represent the initial state of the vehicle design and cannot be updated in real-time as the vehicle is used.
- (2)
- A detailed energy management strategy model is required. As a core strategy of new energy vehicles, the energy management strategy is generally proprietary to vehicle manufacturers and is not disclosed to the public. In order to address these challenges, a deep learning-based method was developed in this paper with the objective of establishing a PHEV energy consumption prediction model.
3. Energy Consumption Prediction Model Based on Deep Learning
4. Test Results and Analysis
4.1. Experimental Data Preprocessing
4.2. Performance Indicators
4.3. Neural Network Hyperparameters
4.4. Test Results
5. Application of the Model
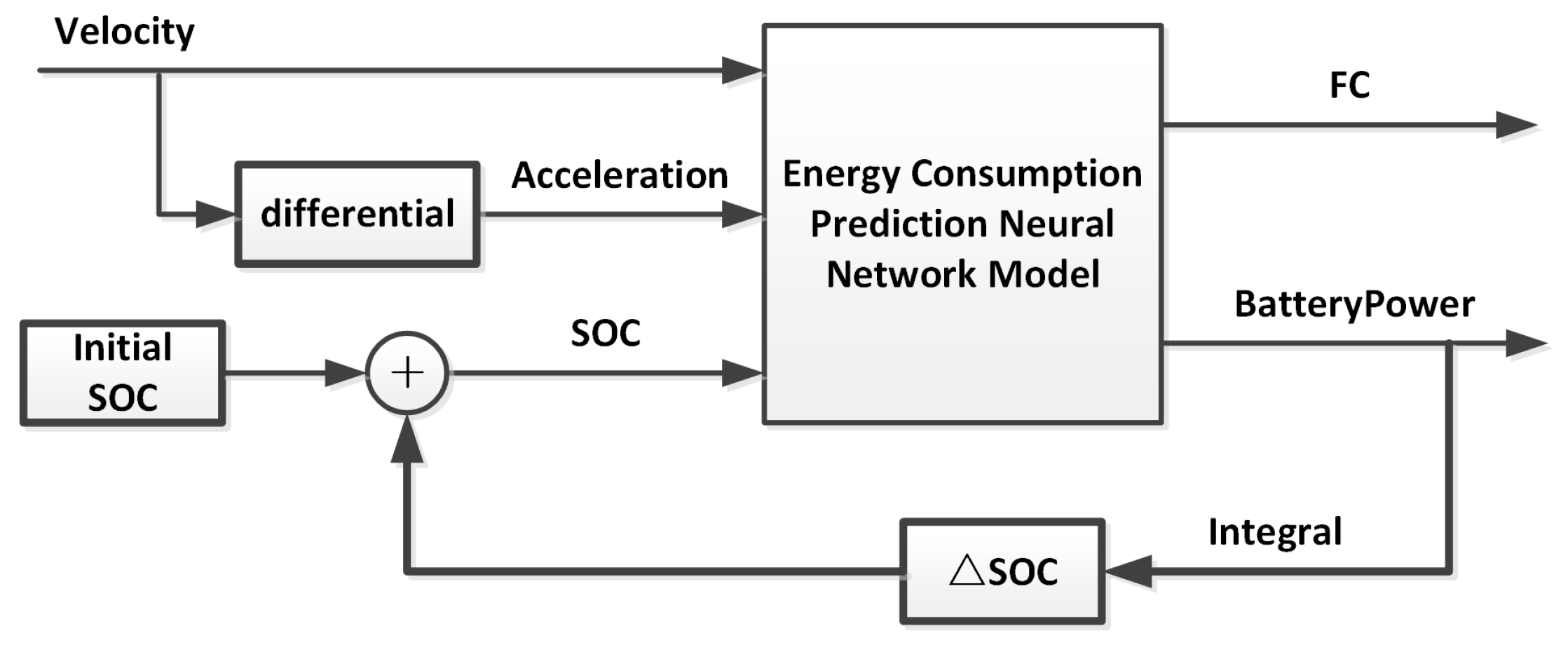
5.1. Energy Consumption Prediction Model Simulation Process
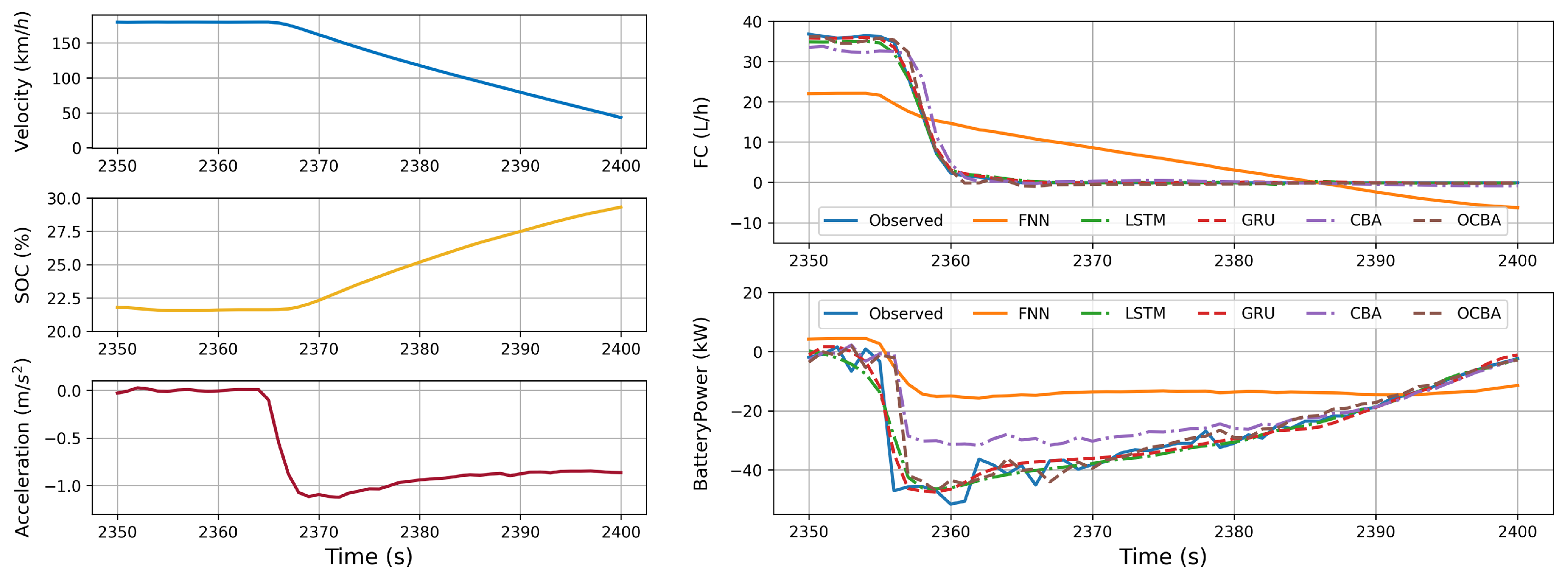
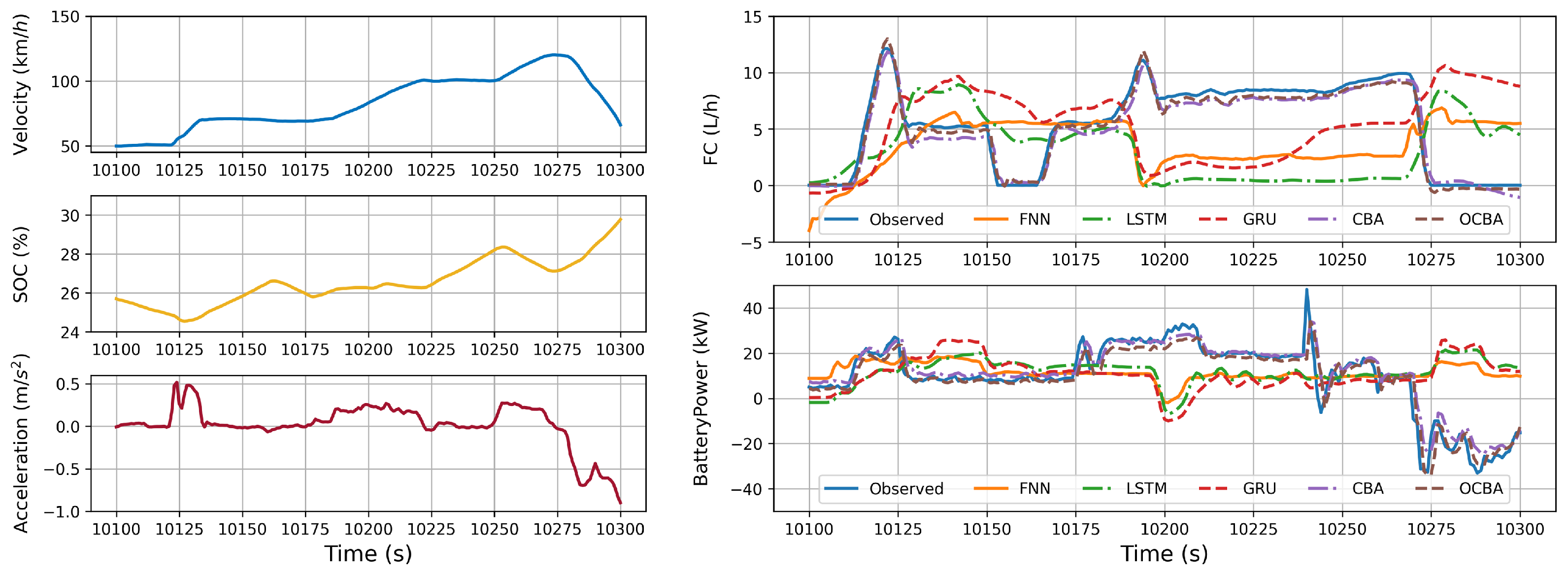
5.2. Prediction of Energy Consumption under Unknown Conditions
6. Conclusions
- (1)
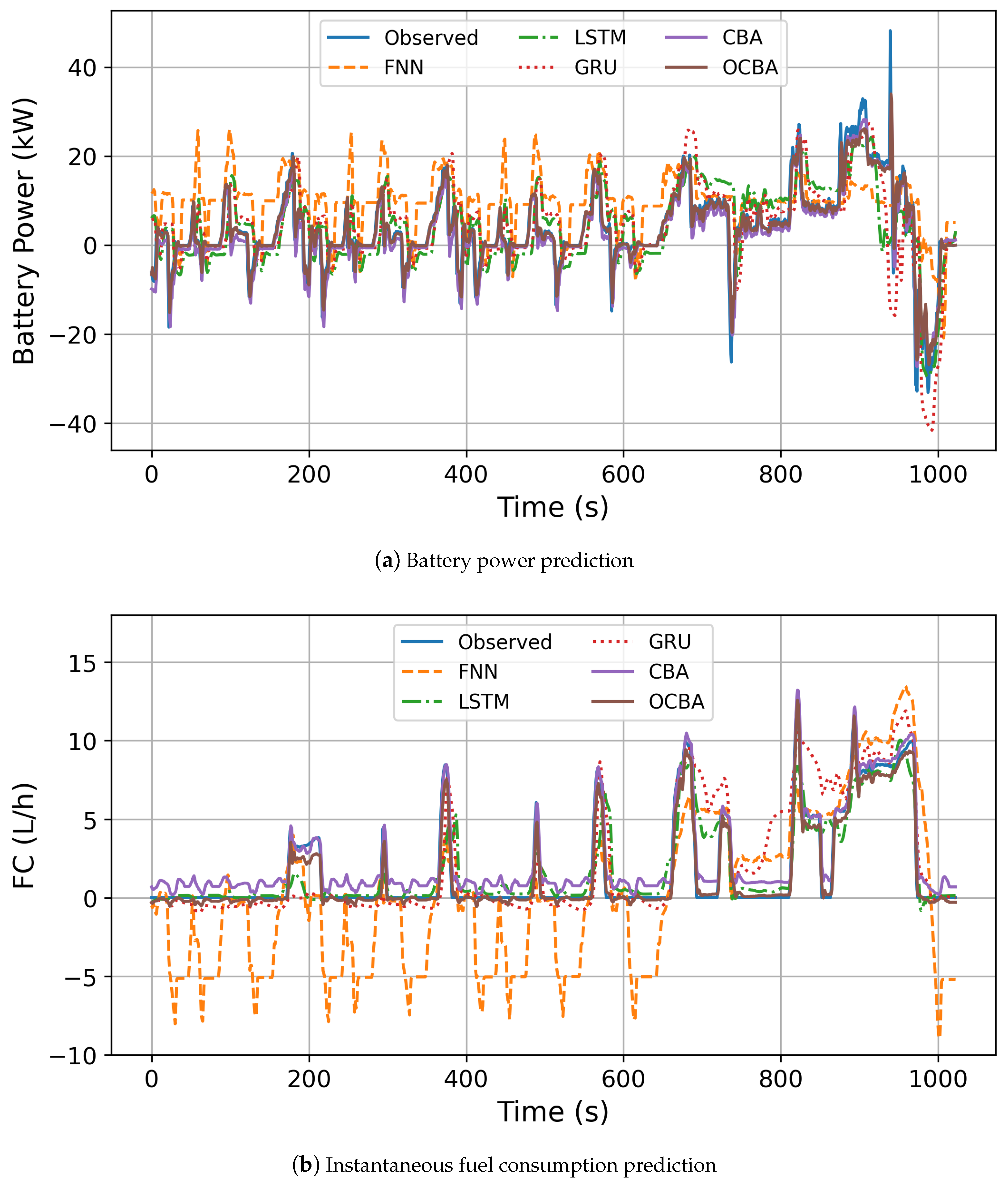
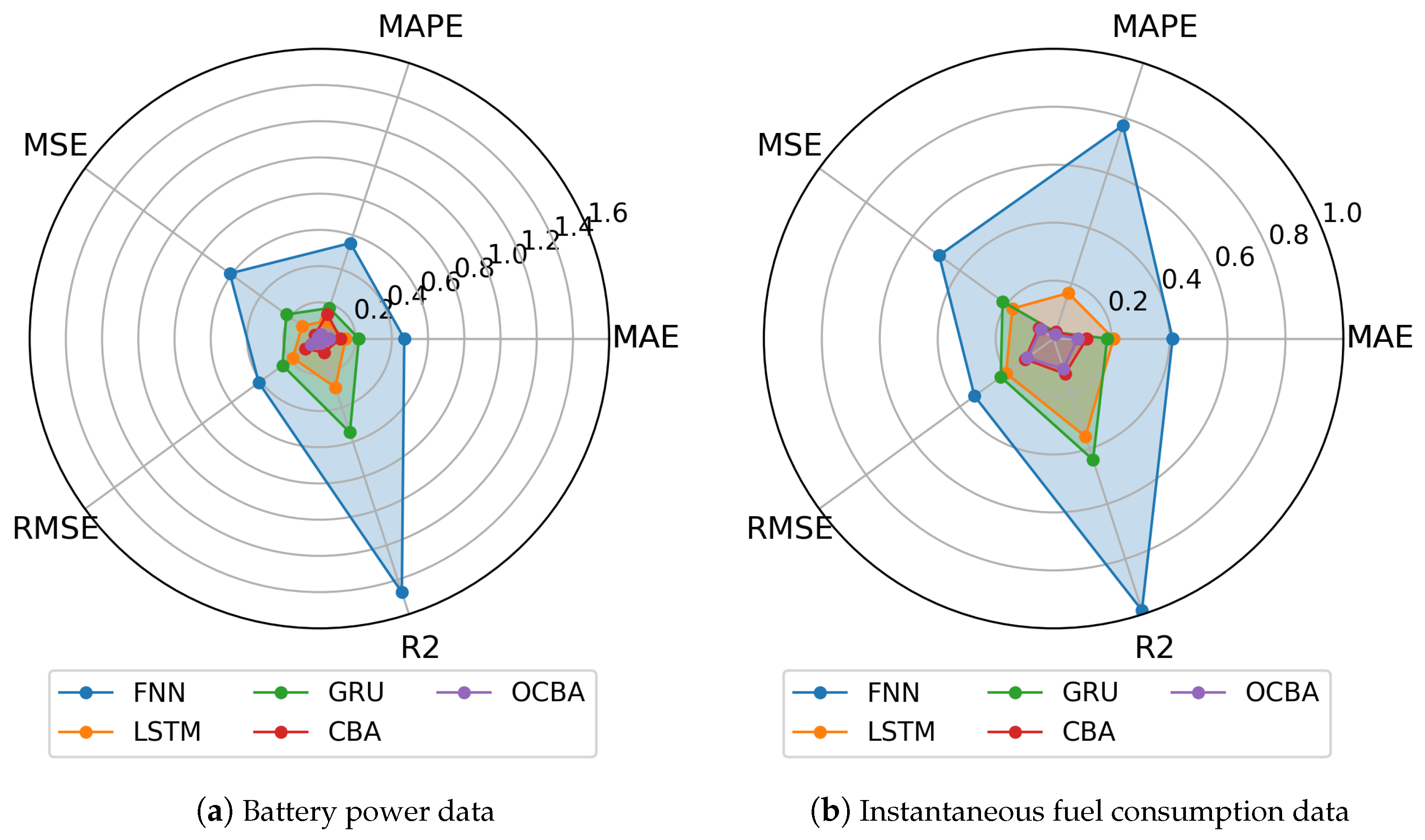
- Comparison of model prediction performance: OCBA > CBA LSTM > GRU FNN. The models with both self-attention and LSTM network architectures performed the best, followed by models with only LSTM network architecture, and FNN performed the worst.
- (2)
- Training effectiveness: the effectiveness of the training was evaluated by comparing the performance of OCBA, CNN-BiLSTM-Attention, LSTM, and GRU against that of FNN. The results demonstrated that the aforementioned models exhibited significantly superior performance. This can be attributed to the fact that PHEV energy consumption is contingent upon battery SOC, which exhibits a time-dependent behavior. Consequently, a network model with an LSTM-like architecture is deemed optimal for predicting PHEV energy consumption.
- (3)
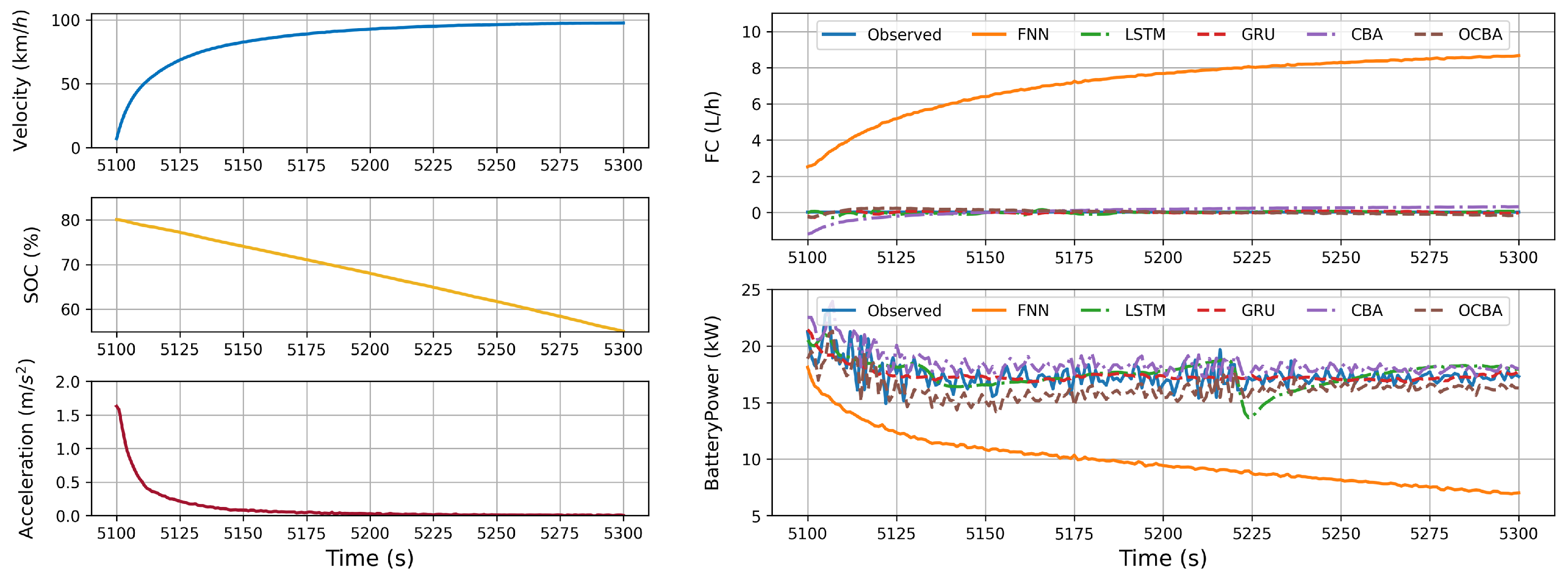
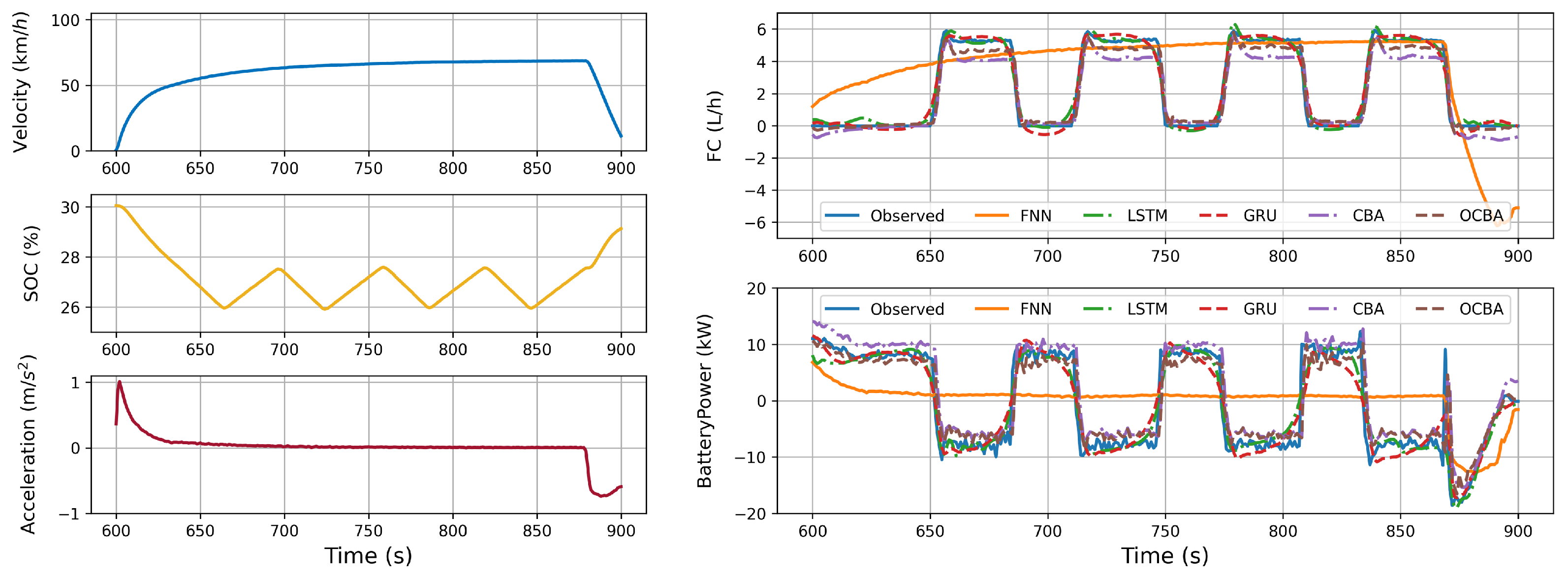
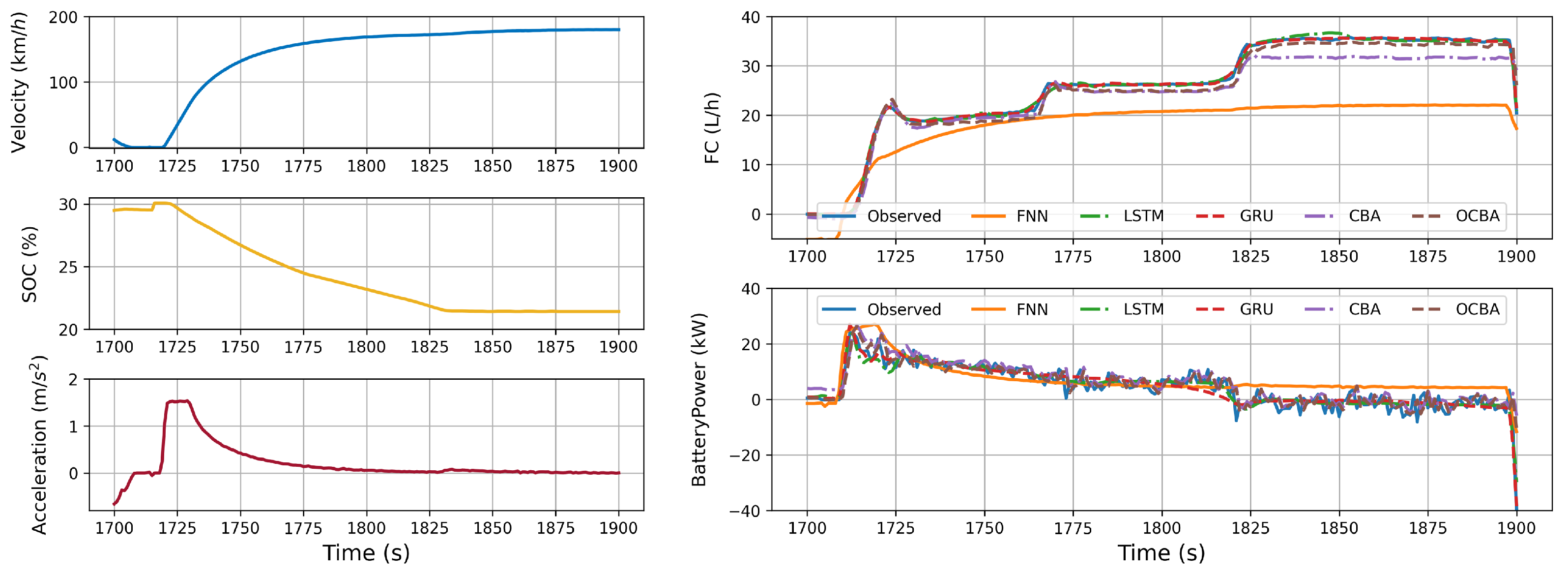
- Practical application: The model trained on deep neural networks is capable of accurately predicting the fuel and electricity consumption of vehicles with low-demand signals, rendering it applicable in the field of intelligent transportation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Lei, N.; Liu, S.; Fan, Q.; Wang, Z. Data-driven predictive energy consumption minimization strategy for connected plug-in hybrid electric vehicles. Energy 2023, 283, 128514. [Google Scholar] [CrossRef]
- Yang, C.; Du, X.; Wang, W.; Yuan, L.; Yang, L. Variable optimization domain-based cooperative energy management strategy for connected plug-in hybrid electric vehicles. Energy 2024, 290, 130206. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Mi, S.; Zhao, W.; He, Z.; Qian, Y.; Lu, X. Comparative study of hybrid architectures integrated with dual-fuel intelligent charge compression ignition engine: A commercial powertrain solution towards carbon neutrality. Energy Convers. Manag. 2023, 292, 117423. [Google Scholar] [CrossRef]
- Vignesh, R.; Ashok, B. Intelligent energy management through neuro-fuzzy based adaptive ECMS approach for an optimal battery utilization in plugin parallel hybrid electric vehicle. Energy Convers. Manag. 2023, 280, 116792. [Google Scholar] [CrossRef]
- Pu, S.; Chu, L.; Hu, J.; Li, S.; Hou, Z. An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental Perceiver. Sensors 2022, 22, 9621. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Zhuang, W.; Zhang, H.; Zhao, R.; Liu, H.; Qu, L.; Zhang, J.; Chen, B. A comparative study of energy-oriented driving strategy for connected electric vehicles on freeways with varying slopes. Energy 2024, 289, 129916. [Google Scholar] [CrossRef]
- Liang, Y.; Dong, H.; Li, D.; Song, Z. Adaptive eco-cruising control for connected electric vehicles considering a dynamic preceding vehicle. eTransportation 2024, 19, 100299. [Google Scholar] [CrossRef]
- Wu, F.; Adulyasak, Y.; Cordeau, J.F. Modeling and Solving the Traveling Salesman Problem with Speed Optimization for a Plug-In Hybrid Electric Vehicle. Transp. Sci. 2024, 58, 562–567. [Google Scholar] [CrossRef]
- Zacharof, N.; Doulgeris, S.; Zafeiriadis, A.; Dimaratos, A.; van Gijlswijk, R.; Díaz, S.; Samaras, Z. A simulation model of the real-world fuel and energy consumption of light-duty vehicles. Front. Future Transp. 2024, 5, 1334651. [Google Scholar] [CrossRef]
- Huang, J.; Song, G.; Wu, Y.; Zhai, Z.; Zhang, Z.; Zhang, L. A fuel consumption model for mixed traffic flow in multiple connected and autonomous scenarios. IET Intell. Transp. Syst. 2024, 18, 480–494. [Google Scholar] [CrossRef]
- Pang, Q.; Chen, S.; Ma, Y.; Qiao, F.; Zhang, Z.; Liu, H. Estimating of energy consumption of electric vehicles under different road characteristics: A case study for Nanjing, China. Int. J. Green Energy 2024, 1–16. [Google Scholar] [CrossRef]
- Chen, B.; Wang, M.; Hu, L.; He, G.; Yan, H.; Wen, X.; Du, R. Data-driven Koopman model predictive control for hybrid energy storage system of electric vehicles under vehicle-following scenarios. Appl. Energy 2024, 365, 123218. [Google Scholar] [CrossRef]
- Zhang, J.; Gao, Q.; Tian, J.; Cui, F.; Wang, T. Car-following model based on spatial expectation effect in connected vehicle environment: Modeling, stability analysis and identification. Phys. A Stat. Mech. Its Appl. 2024, 641, 129747. [Google Scholar] [CrossRef]
- Basso, F.; Feijoo, F.; Pezoa, R.; Varas, M.; Vidal, B. The impact of electromobility in public transport: An estimation of energy consumption using disaggregated data in Santiago, Chile. Energy 2024, 286, 129550. [Google Scholar] [CrossRef]
- Ramoliya, F.; Trivedi, C.; Darji, K.; Kakkar, R.; Gupta, R.; Tanwar, S.; Polkowski, Z.; Alqahtani, F.; Tolba, A. ML-based Energy Consumption and Distribution Framework Analysis for EVs and Charging Stations in Smart Grid Environment. IEEE Access 2024, 12, 23319–23337. [Google Scholar] [CrossRef]
- Doulgeris, S.; Zafeiriadis, A.; Athanasopoulos, N.; Tzivelou, N.; Michali, M.; Papagianni, S.; Samaras, Z. Evaluation of energy consumption and electric range of battery electric busses for application to public transportation. Transp. Eng. 2024, 15, 100223. [Google Scholar] [CrossRef]
- Dabčević, Z.; Škugor, B.; Cvok, I.; Deur, J. A Trip-Based Data-Driven Model for Predicting Battery Energy Consumption of Electric City Buses. Energies 2024, 17, 911. [Google Scholar] [CrossRef]
- James, S.S.; Anderson, S.R.; Da Lio, M. Longitudinal vehicle dynamics: A comparison of physical and data-driven models under large-scale real-world driving conditions. IEEE Access 2020, 8, 73714–73729. [Google Scholar] [CrossRef]
- Guo, Z.; Wu, W.; Yuan, S. Longitudinal-vertical dynamics of wheeled vehicle under off-road conditions. Veh. Syst. Dyn. 2022, 60, 470–490. [Google Scholar] [CrossRef]
- Da Lio, M.; Bortoluzzi, D.; Rosati Papini, G.P. Modelling longitudinal vehicle dynamics with neural networks. Veh. Syst. Dyn. 2020, 58, 1675–1693. [Google Scholar] [CrossRef]
- Vidal, C.; Kollmeyer, P.; Naguib, M.; Malysz, P.; Gross, O.; Emadi, A. Robust xev battery state-of-charge estimator design using a feedforward deep neural network. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 2872–2880. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, L.; Sun, R.; Yi, J.; Liu, L.; Luan, T.H. Save or waste: Real data based energy-efficient driving. IEEE Access 2020, 8, 133936–133950. [Google Scholar] [CrossRef]
- Kim, N.; Song, J.; Lee, S.; Choe, J.; Han, K.; Park, S.; Kim, S.W. APOTS: A model for adversarial prediction of traffic speed. In Proceedings of the 2022 IEEE 38th International Conference on Data Engineering (ICDE), Virtual, 9–12 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 3353–3359. [Google Scholar]
- Riaz, A.; Rahman, H.; Arshad, M.A.; Nabeel, M.; Yasin, A.; Al-Adhaileh, M.H.; Eldin, E.T.; Ghamry, N.A. Augmentation of Deep Learning Models for Multistep Traffic Speed Prediction. Appl. Sci. 2022, 12, 9723. [Google Scholar] [CrossRef]
- Li, F.; Sun, C.; Han, W.; Yan, T.; Li, G.; Zhao, Z.; Sun, Y. Medium-term load forecasting of power system based on BiLSTM and parallel feature extraction network. IET Gener. Transm. Distrib. 2024, 18, 190–201. [Google Scholar] [CrossRef]
- Fu, H.; Zhang, J.; Xie, S. A Novel Improved Variational Mode Decomposition-Temporal Convolutional Network-Gated Recurrent Unit with Multi-Head Attention Mechanism for Enhanced Photovoltaic Power Forecasting. Electronics 2024, 13, 1837. [Google Scholar] [CrossRef]
- Xu, H.; Hu, F.; Liang, X.; Zhao, G.; Abugunmi, M. A framework for electricity load forecasting based on attention mechanism time series depthwise separable convolutional neural network. Energy 2024, 299, 131258. [Google Scholar] [CrossRef]
- Ma, Z.; Sun, Y.; Ji, H.; Li, S.; Nie, S.; Yin, F. A CNN-BiLSTM-Attention approach for EHA degradation prediction based on time-series generative adversarial network. Mech. Syst. Signal Process. 2024, 215, 111443. [Google Scholar] [CrossRef]
- Mogno, C.; Arcidiacono, V.; Ciuffo, B.; Maineri, L.; Makridis, M.; Pavlovic, J.; Tsiakmakis, S.; Fontaras, G. Tools for Customized Consumer Information on Vehicle Energy Consumption and Costs-A European Case Study. Transp. Res. Procedia 2020, 48, 1493–1504. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Test Type | Control Pedal | Pedal Quantity (%) | SOC (%) | Test Time (s) |
|---|---|---|---|---|---|
| 1 | Single acceleration | Acceleration pedal | 0; 5; 10; 15; 20; 25; 30; 35; 40; 50; 60; 70; 80; 90; 100 | Initial: 30% | 2743 |
| 5; 10; 15; 20; 25; 30; 40; 50; 60; 70; 80; 90; 100 | Initial: 80% | 2333 | |||
| 2 | Single braking | Brake pedal | 0; 3; 5; 7; 10; 12; 15; 20; 25; 30; 35; 40; 45; 50 | Initial: 30% | 1693 |
| 3 | Cyclic operation condition | Following vehicle speed | 4 JC08 | Continuously decrease from 100% to 30% | 5087 |
| 3 HWY | 2361 | ||||
| 5 NEDC | 5890 |
| Parameter | Initial Value | Optimization Value of Instantaneous Fuel Consumption Prediction | Optimization Value of Battery Power Prediction | Value Range |
|---|---|---|---|---|
| Number of FNN/LSTM/GRU layer neurons | 100 | 125 | 125 | [10, 200] |
| Initial learning rate | 0.01 | 0.001 | 0.0061 | [0.001, 0.01] |
| Number of BiLSTM layer neurons | 25 | 17 | 41 | [10, 50] |
| Number of self-attention layer key channels | 2 | 30 | 25 | [2, 50] |
| Regularization parameters | 0.001 | 0.0001 | 0.0008 | [0.0001, 0.001] |
| Output | Performance Indicator | FNN | LSTM | GRU | CBA | OCBA |
|---|---|---|---|---|---|---|
| Electric power | MAE | 7.93 | 3.99 | 3.57 | 2.21 | 1.60 |
| MAE | 7.93 | 3.99 | 3.57 | 2.21 | 1.60 | |
| MAPE | 1446.70 | 308.86 | 42.66 | 44.24 | 28.18 | |
| MSE | 84.30 | 30.41 | 37.59 | 10.92 | 9.40 | |
| RMSE | 9.18 | 5.51 | 6.13 | 3.30 | 3.07 | |
| 0.01 | 0.64 | 0.56 | 0.87 | 0.89 | ||
| Instantaneous fuel consumption | MAE | 3.09 | 0.95 | 1.43 | 0.77 | 0.35 |
| MAE | 3.09 | 0.95 | 1.43 | 0.77 | 0.35 | |
| MAPE | 92.39 | 16.89 | 29.52 | 23.48 | 4.35 | |
| MSE | 14.18 | 2.73 | 5.24 | 0.77 | 0.26 | |
| RMSE | 3.77 | 1.65 | 2.29 | 0.88 | 0.51 | |
| −0.47 | 0.72 | 0.46 | 0.92 | 0.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Chen, Z.; Wang, W.; Fang, X. Prediction Method of PHEV Driving Energy Consumption Based on the Optimized CNN BiLSTM Attention Network. Energies 2024, 17, 2959. https://doi.org/10.3390/en17122959
Zhang X, Chen Z, Wang W, Fang X. Prediction Method of PHEV Driving Energy Consumption Based on the Optimized CNN BiLSTM Attention Network. Energies. 2024; 17(12):2959. https://doi.org/10.3390/en17122959
Chicago/Turabian StyleZhang, Xuezhao, Zijie Chen, Wenxiao Wang, and Xiaofen Fang. 2024. "Prediction Method of PHEV Driving Energy Consumption Based on the Optimized CNN BiLSTM Attention Network" Energies 17, no. 12: 2959. https://doi.org/10.3390/en17122959
APA StyleZhang, X., Chen, Z., Wang, W., & Fang, X. (2024). Prediction Method of PHEV Driving Energy Consumption Based on the Optimized CNN BiLSTM Attention Network. Energies, 17(12), 2959. https://doi.org/10.3390/en17122959