1. Introduction
Brushless doubly fed electric generators without brushes and slip rings have superior characteristics, including low maintenance costs and high reliability [
1,
2,
3,
4,
5,
6]. Many scholars and scientific research institutions have studied this topic in the past few years [
7,
8,
9,
10,
11]. Studies show that these generators outperform conventional brush-geared doubly fed induction generators (DFIGs) in the field of wind power generation [
12,
13,
14].
For a BDFG in grid-connected operations, an instantaneous drop in the grid voltage will cause severe over-currents and oscillations in the BDFG windings.
Shao performed a dynamic analysis to investigate low-voltage ride-through (LVRT) events with symmetric drops set to 50% and zero [
15]. A new reduced dynamic T-model was proposed in [
16], and a detailed mathematical analysis was derived for the physical quantities of the PW and CW (flux, current, and voltage) subjected to voltage-dip conditions. However, the authors did not propose a feasible strategy for this condition.
Crowbars or series dynamic resistors were installed between the CW and converter to absorb the excess power in [
17]. The disadvantage is that the system cost increases.
Regarding some control strategies without crowbars, the literature indicates that the active and reactive currents of the PW are a rated value and zero under a normal grid voltage. When an LVRT event occurs, the commanded values for the active and reactive currents are set to zero and a rated value, respectively, to output the reactive power to the grid [
18,
19]. However, large overshoots and oscillations occur in the system using these strategies.
In [
20], the author pointed out that the control side of a brushless doubly fed generator has a large leakage inductance, which enhances its natural ability for low-voltage ride-through. Based on the impedance model and using the generalized Nyquist criterion, the influence of different short-circuit ratios, phase-locked loops, and current loop ratio parameters on operational stability was studied, and the Bode diagrams are provided in [
21]. The author of [
22] studied the role of virtual impedance and proposed a dynamic feedforward compensation to limit the forced component of the fault current in a DFIG and accelerate its natural component attenuation.
In [
23], based on the expression of the transient voltage of the control winding, the flux change rates of the rotor winding, power winding, and control winding were added as feedforward compensation variables for the voltage command value. The advantage is that a transient fully decoupled control can be achieved, which can suppress the interference of these physical quantities with the control winding current when the grid voltage drops. The disadvantage is that the rotor flux of a BFDG cannot be directly obtained and it must be converted to make the control more complex. Therefore, the paper only provides a simulation, and it is difficult to conduct experimental verification. A virtual synchronous machine approach was proposed in [
24], brushless doubly fed generators were analyzed and compared with the synchronous generators, and a current signal compensation method based on a virtual synchronous machine was proposed. The advantage is that this increases the system’s moment of inertia, making the system respond slowly and reducing the impact of faults on the system. Simulation waveforms proved that the grid voltage drops to 30%. The disadvantages are poor stability, complex control, and simulation without experimental verification. A crowbarless LVRT control strategy based on flux linkage tracking for a BDFG under symmetrical voltage dips was proposed in [
25]. A simple controller in a static reference frame rather than a rotating coordinate system was presented to implement flux linkage tracking. Based on the conventional control method, the amplitude and phase compensation of the CW flux were added to the control strategy. Meanwhile, a tracking coefficient, defined as the ratio of the CW flux to the PW flux, was proposed, and experiments were carried out using different coefficients. In the most severe case, with the maximum rotor speed and under zero-voltage dips, the experimental results showed that the CW current peak could be limited to twice the CW current rating, and the torque ripple was small during the fault. The advantage is that this belongs to the feedforward control of reverse compensation, and the fluctuation in the power winding magnetic flux is directly added to the control side, which can rapidly suppress the fluctuation in the control winding current. Moreover, the torque ripple during the fault is relatively small, but the article lacks an analysis of its effectiveness compared with other control strategies.
Given the deficiencies of the current research on the low-voltage ride-through of BDFGs, this paper further analyzes the dynamic operational characteristics of BDFGs when the grid voltage drops to 0 V. An optimal control strategy is proposed to improve the transient operational characteristics of BDFGs, which are based on the characteristics of the generator model during the fault period to solve the optimal CW voltage command value and minimize fluctuations in the electromagnetic torque to obtain a good transient response.
The main innovations of this paper are the transient characteristics of a BDFG under LVRT events and its optimal control. First, a full-order fault dynamics model for a BDFG with symmetrical voltage drops is established. It is found that the peak and oscillation duration of PW, CW, and RW currents are related to the CW voltage, the drop degree and phase of the grid voltage, and the generator speed. Then, an optimal control strategy is proposed to reduce system overshoot and accelerate convergence. This strategy can improve the system’s anti-disturbance ability. Finally, the feasibility and effectiveness of the optimum control strategy are validated by comparing the experimental waveform data with the results of the conventional PI control strategy.
3. Transient Analysis of an LVRT Event
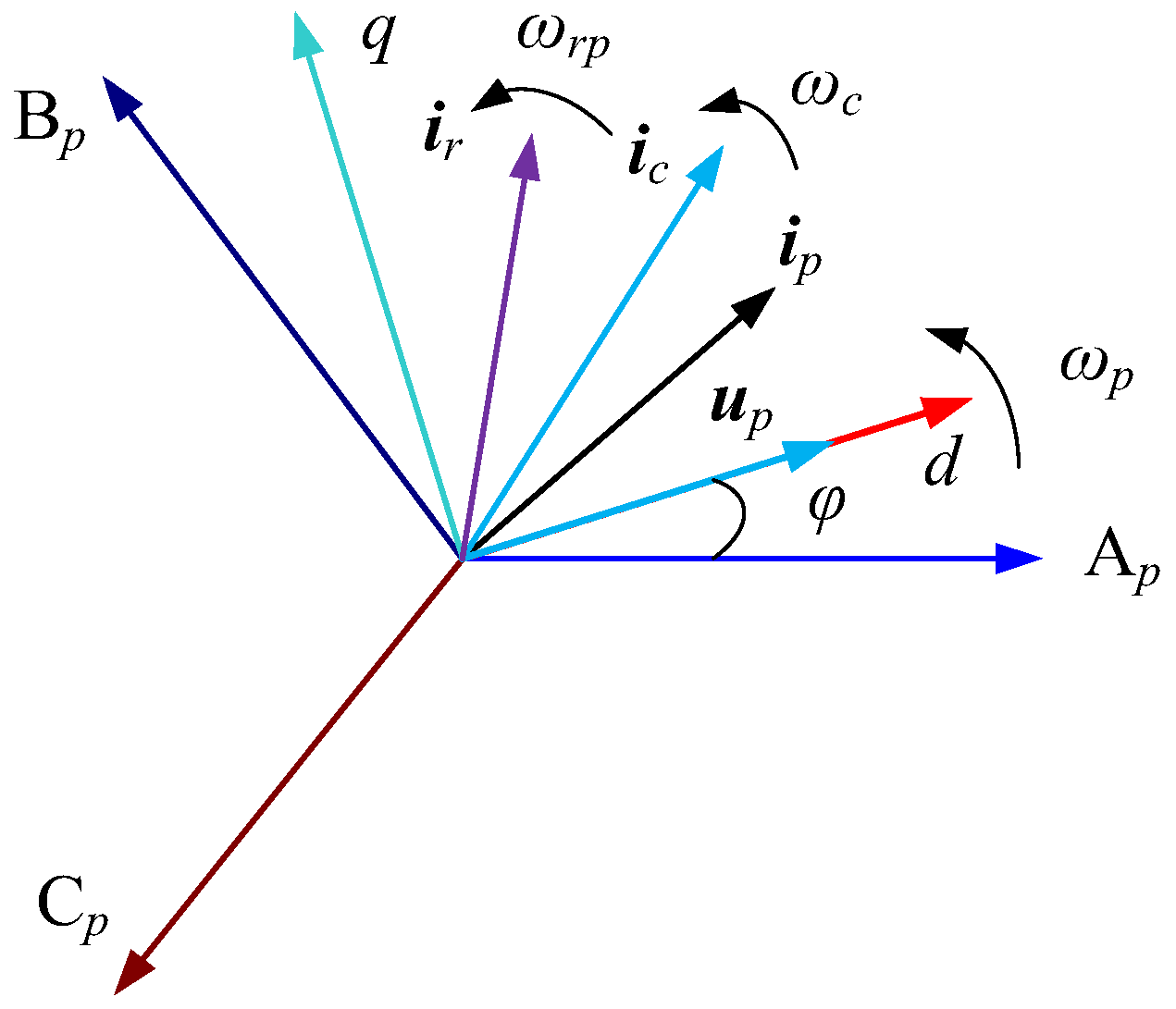
Using a grid voltage orientation strategy, the PW voltage vector is oriented with the
d-axis. Then, according to (3)–(8), the vector diagram of a BDFG in a PW synchronous speed rotating coordinate system can be depicted as follows [
29].
In
Figure 2, the expression of the vector in the
dq-axis coordinate system is
F =
fd +
jfq, where
F can represent any vector, and
φ is the grid voltage phase.
For a BDFG in grid-connected operation, an instantaneous symmetrical drop in the grid voltage at the grid connection point of the wind farm is equivalent to the sudden addition of a reverse voltage source at the connection point, which inevitably leads to severe oscillations and overshoot in the PW, CW, and RW currents and electromagnetic torque. The worst case is that the grid voltage suddenly drops to 0 V, which is equivalent to a PW short circuit fault occurrence.
If the winding currents after the grid voltage fault must be solved, the steady state current before the fault and the transient current after the fault need to be calculated according to the superposition principle.
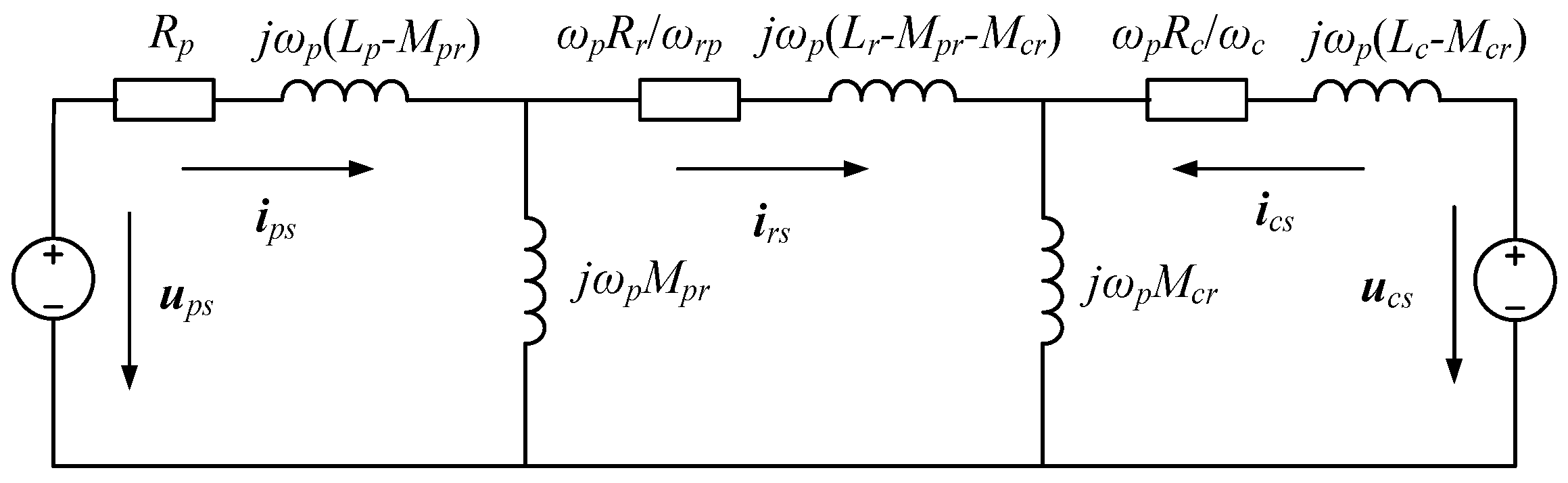
When the BDFG is in grid connection and stable operation, the differential terms in (3)–(8) are 0 and the steady-state equations are obtained. The steady-state equivalent circuit is shown in
Figure 3.
The analytical expressions of the PW, CW, and RW currents of the BDFG in steady-state operation are obtained as follows:
In (11),
ups,
ucs,
ips,
ics, and
irs represent the steady-state voltages and currents of the PW, CW, and RW. The expressions of the steady-state impedances
Zps1,
Zps2,
Zcs1,
Zcs2,
Zrs1, and
Zrs2 are shown in
Appendix A. To study the natural characteristics of generators under grid voltage drops, the following assumptions must be made: (1) there is no sudden change in the rotor speed before and after grid voltage drops; (2) the CW side voltage does not change before and after voltage drops.
The dynamic equivalent circuit of the BDFG in the case of an instantaneous drop in the grid voltage is shown in
Figure 4.
In the case of an instantaneous symmetrical drop in the grid voltage, in (3)–(8),
up =
upf is a sudden reverse grid voltage, and
upf = −
kups, where
k is the voltage drop degree coefficient of the PW. When
k = 1, a reverse voltage with the same amplitude as the original grid voltage is suddenly added at the parallel node, that is, the grid voltage instantaneously drops to 0 V. Since the CW voltage is assumed to be constant, according to Thevenin’s theorem, when analyzing the impact of grid voltage fault, the CW voltage is 0 V, such that
uc =
ucf = 0. Then,
ipf,
icf, and
irf represent the PW, CW, and RW currents generated by the grid fault. Via Laplace transformation and its inverse transformation, the solutions of the grid fault currents
ipf,
icf, and
irf are as follows:
In (12),
Zpf0 is the impedance of the direct current (DC) steady-state component of the PW fault current.
Zpf1,
Zpf2, and
Zpf3 are the impedances of the attenuated fundamental frequency, CW frequency, and RW frequency components of the PW fault current. The attenuated component of the fault current indicates that the flux linkage of the PW, CW, and RW does not suddenly change due to the principle of flux linkage conservation, so an oscillating current with an attenuation trend is generated in the PW circuit via these flux linkages. As
Zcf0,
Zcf1,
Zcf2, and
Zcf3 are the relevant impedances of the CW fault current, and
Zrf0,
Zrf1,
Zrf2, and
Zrf3 are the relevant impedances of the RW fault current, the meanings of these parameters can be analogized. The detailed expressions of these impedances are shown in
Appendix A. The transient impedances are related to the BDFG’s parameters.
Furthermore,
Tp,
Tc, and
Tr are the attenuation time constants of the PW, CW, and RW The expressions are described in (13).
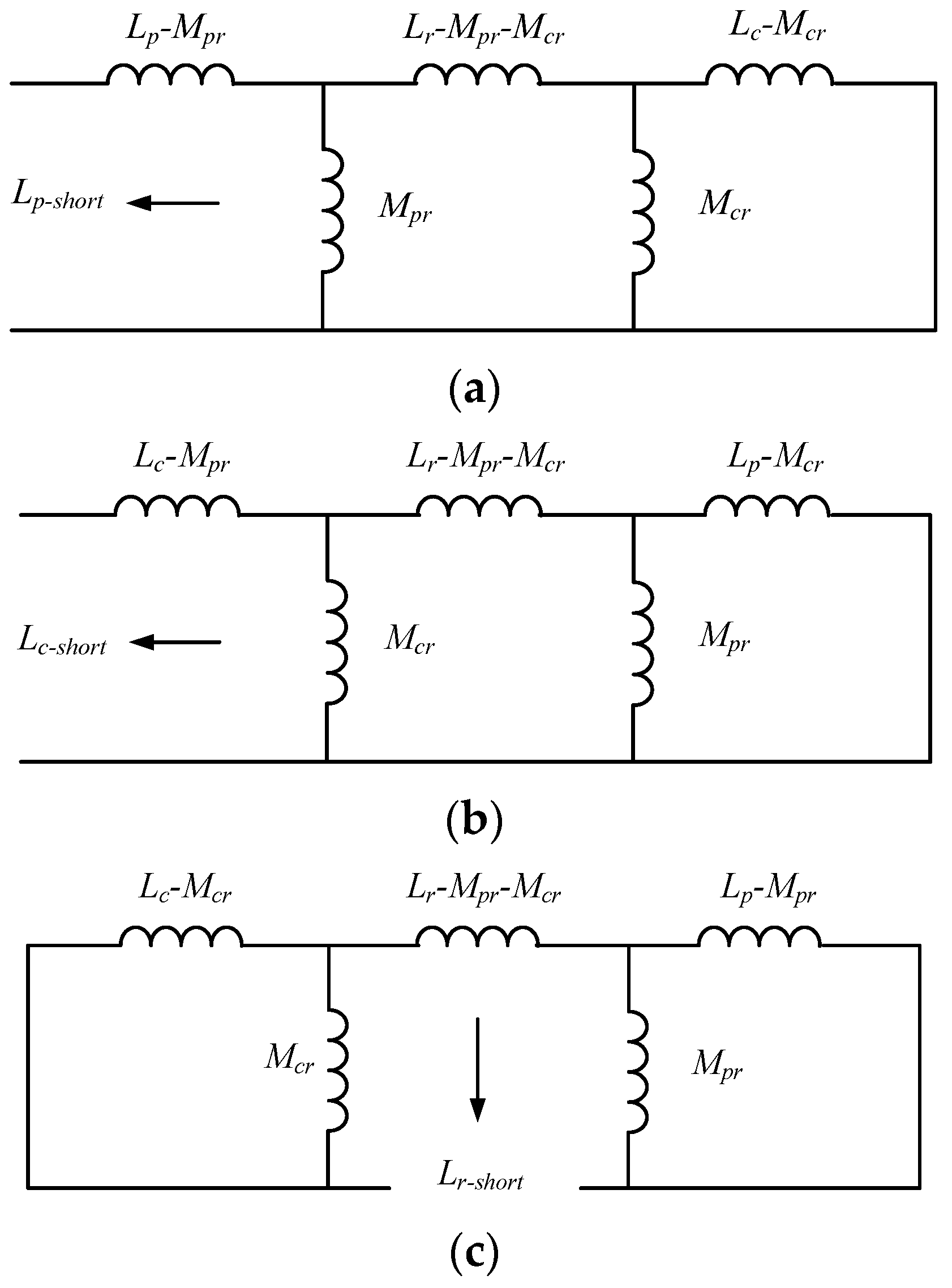
In (13),
Lp-short,
Lc-short, and
Lr-short are the short inductances of the PW, CW, and RW. These short-circuit inductors consist of leakage inductance circuits and mutual inductance. The circuit diagrams are shown in
Figure 5.
The transient impedances are related to the BDFG’s parameters. The attenuation coefficients of the PW, CW, and RW are determined for a manufactured BDFG.
According to the superposition principle, the expressions of the PW, CW, and RW currents after the grid voltage fault occurs are the linear superpositions of the steady-state component and the dynamic component.
Thus far, the analytical expressions of the PW, CW, and RW currents of the BDFG have been solved in the PW synchronous vector space under an instantaneous symmetrical drop in the grid voltage. The analytical expressions in the three-phase static coordinate system can be obtained via a rotation transformation of the complex form. The simulations will be conducted in the following sections.
Based on (11), (12), and (14), the overshoot of the PW, CW, and RW currents is related to the CW voltage
uc, the degree of grid voltage drops
k, the phase of the grid voltage vector
up (that is,
φ in
Figure 2), and the rotor speed
ωr. The convergence speed is related to the parameters of the BDFG. The grid voltage drops inevitably, causing a sudden increase and oscillations in the PW, CW, and RW currents. In the actual brushless doubly fed wind power generation system, the drop degree and phase of the grid voltage cannot be controlled, and the rotor speed will not suddenly change due to the inertia of the generator. Only the CW voltage of the BDFG can be changed via certain control methods to reduce overshoot and accelerate convergence, and this function can be realized via optimal control.
4. The Optimal Control Strategy
According to modern control theory, combined with the characteristics of the BDFG model during grid voltage drop faults, its input is the voltage and phase of the CW, the initial conditions are determined, the fault duration is determined, and the terminal is free. If the objective function is set as the finite-time integral value of the square of the electromagnetic torque Te at this time, making it achieve the minimum value, it could suppress the oscillation of the electromagnetic torque. The model can be established via the Pontryagin minimum principle in optimal control, and the optimal CW voltage command value can be directly solved.
The special structure of the BDFG’s rotor is a self-closing short circuit with no wiring leads. The RW only serves to transfer a magnetic field and energy and hardly provides active power. Moreover, the RW current is generally not considered in the control loop. Therefore, ignoring the RW’s resistance and utilizing the 0 V rotor voltage condition, (3)–(10) are simplified into a reduced-order model of the BDFG described in (15)–(17). Motor conventions are used on both the power side and the control side.
The relationship between the parameters in (15)–(17) and the parameters in (3)–(10) is
According to mathematical models (15)–(17), under the condition of the PW voltage orientation, taking the
dq-axis components of the CW current as the state variable and the
dq-axis components of the CW and PW voltages as the input, the state equation is obtained, as shown in (19):
where
ωre is the equivalent electrical angular velocity of the BDFG:
and the expression of
λm is
Under steady-state conditions, the relationship between the
d-axis component of the PW voltage
upd and the
q-axis component of the PW flux linkage
ψpq is
Since the parameters of the generator system are determined after the instantaneous symmetrical drop in the grid voltage, the generator system described in (19) is considered scleronomous. Because
upd is a constant,
ucd and
ucq are free variables. Therefore, when discussing optimal control, the input term of
upd can be ignored. The state space Equation (19) is reconstructed as follows:
The mathematical model shown in (23) is the research object of optimal control. After the model is established, the initial condition, constraints condition, and performance function are determined. Then, the optimal control input must be solved.
According to the optimal control theory, the objective function is the finite-time integral value of the square of the electromagnetic torque Te. Then, the minimum value principle is used.
The starting condition is
The control constraints condition is
where
ucmax is the maximum allowable CW voltage amplitude. Both
ucd and
ucq cannot exceed the maximum value of the CW voltage amplitude. This is because the CW voltage is limited by the capacity of power electronic devices, so there is a maximum value for
ucd and
ucq.
The terminal time
tf is determined, and the state
x(
tf) is free:
The performance function is
According to the approximate expression of
Te described in (17), the square of the electromagnetic torque is
The Hamiltonian function is taken as
The necessary conditions for achieving optimal control are the optimal control
u*, the optimal trajectory
x*, and the optimal covariance vector
λ* meeting the state Equation (33) and the costate Equation (34):
The system of equations could be theoretically solved with the simultaneous Equations (26), (28), (33), and (34). According to the characteristics of the matrices
L and
Q, only the
d-axis component
icd of the CW current is included, and it is independent of the
q-axis component
icq. Then, the initial value of
ucq can be used, and only the optimal solution of
ucd needs to be solved:
In (35),
ucd-opt and
ucq-opt are the optimal CW voltage reference values, and
λ1 and
λ2 are the characteristic roots of the system matrix
A, expressed as
Considering that the exponential function is difficult to express in the algorithm, the instruction values of ucd-opt and ucq-opt in the program are given equivalent sectional fixed values, which can restrain the oscillations of the electromagnetic torque oscillation.
The switching logic between conventional PI control and optimal control is shown in
Figure 6, where the superscript * represents the instruction value.
The optimal control strategy is only enabled during the instantaneous voltage drop period in the power grid, and the optimal command values ucd-opt and ucq-opt of the optimal CW are directly given at this time. The working states before the drop and after the power grid fault are both closed-loop dual PI control strategies.
5. Experimental Results
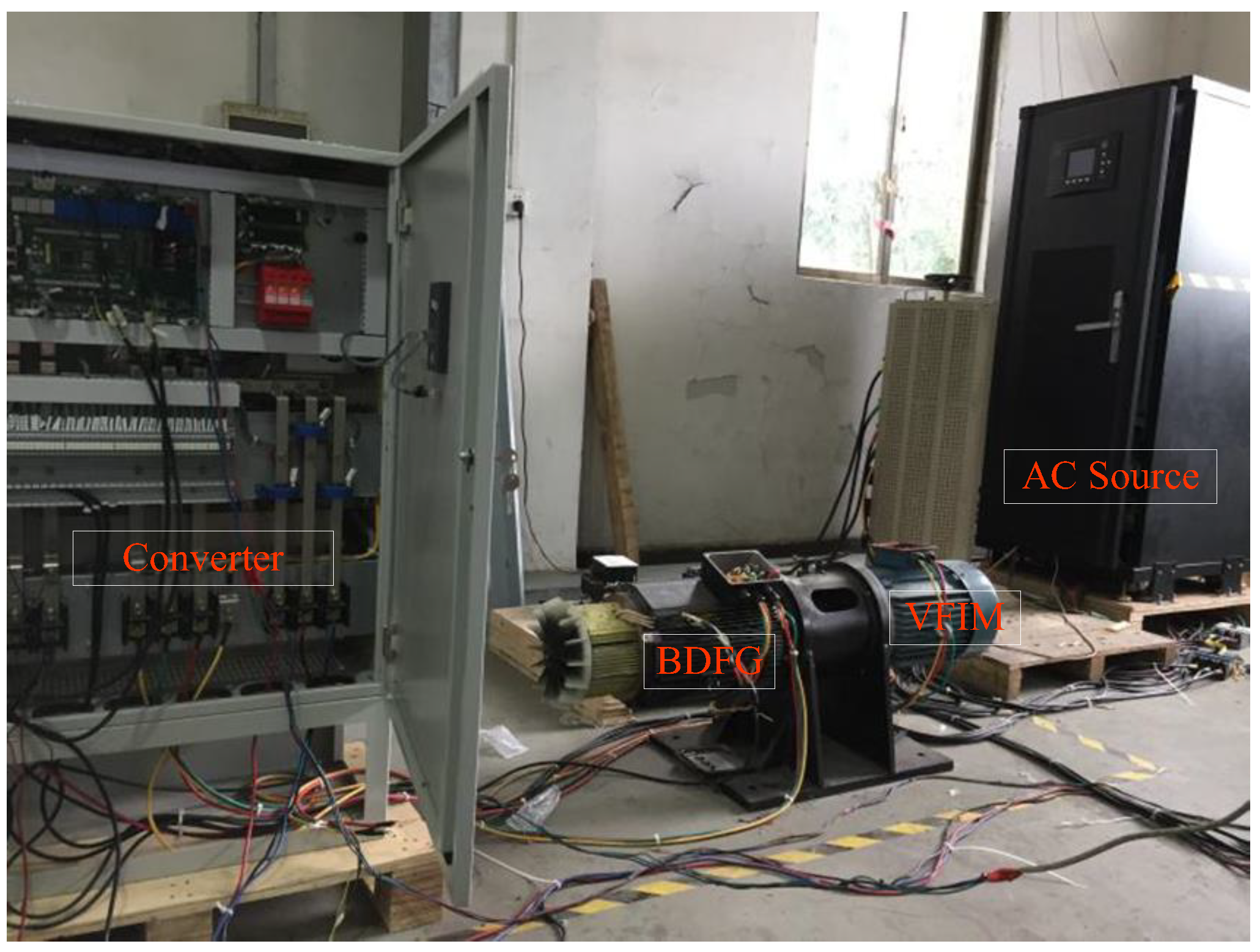
Figure 7 shows a brushless doubly fed wind power generation system platform. The prime mover is a variable-frequency induction motor (VFIM), which simulates the wind turbine. The speed of the motor
ωr, that is, the speed of the brushless doubly fed generator, is controlled with a general-purpose inverter. The system is equipped with an AC source, which is a grid simulator that can generate grid voltage drops.
The algorithm period of the system is 160 us, the sampling period is 160 us, and the IGBT switching period is 6.25 kHz. The root mean square of the grid voltage phase–phase is 380 V, and the frequency is 50 Hz. The rotor speed is regulated at 900 rpm. The active power is 4 kW, and the reactive power is 0 kvar.
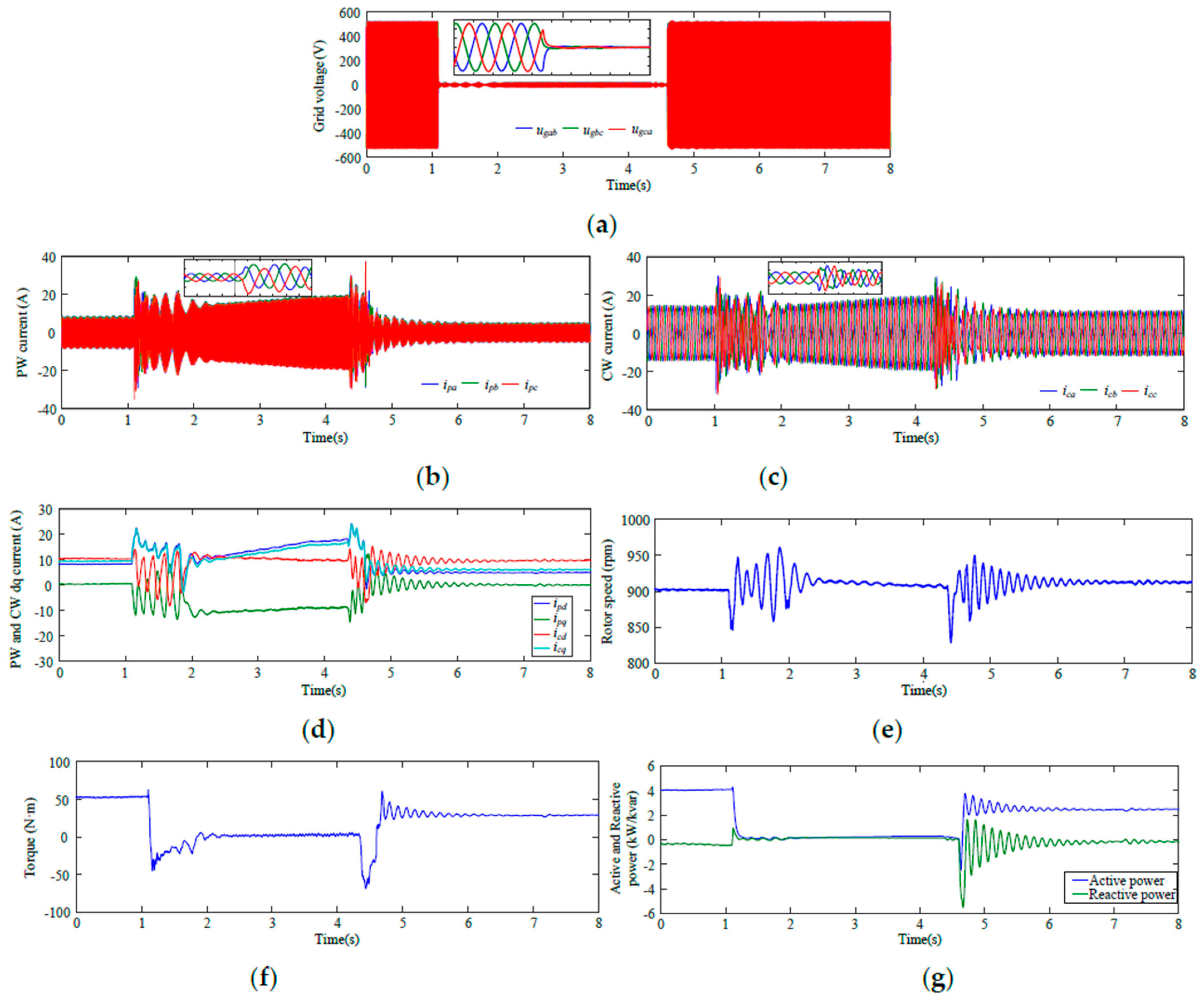
First, the system waveform under traditional PI control is observed and analyzed. The overshoot and oscillations in the physical quantities of the generator are obvious, and the duration reaches 1.3 s. As seen in
Figure 8b, the change in the PW current is very obvious, where its peak value increases from 8.5 A to 32 A, an increase of approximately 3.7 times.
Figure 8c shows that the CW current amplitude is 15 A before the grid voltage drops and suddenly rises to 32 A, increasing to 2.1 times the rated value, which is quite bad for a converter. At the same time,
Figure 8d shows that
icq is synchronous with
ipd, but
icd changes inversely with
ipq, such that
ipd =
icd and
ipq = −
icq. There are severe oscillations in the four
dq components.
Figure 8e shows that the maximum rotor speed
ωr reaches 1000 rpm, and the minimum speed is 820 rpm.
Figure 8f shows a large fluctuation in the torque
Te, which changes from −50 N·m to 50 N·m.
Figure 8g shows a fluctuation in the PW’s active and reactive power.
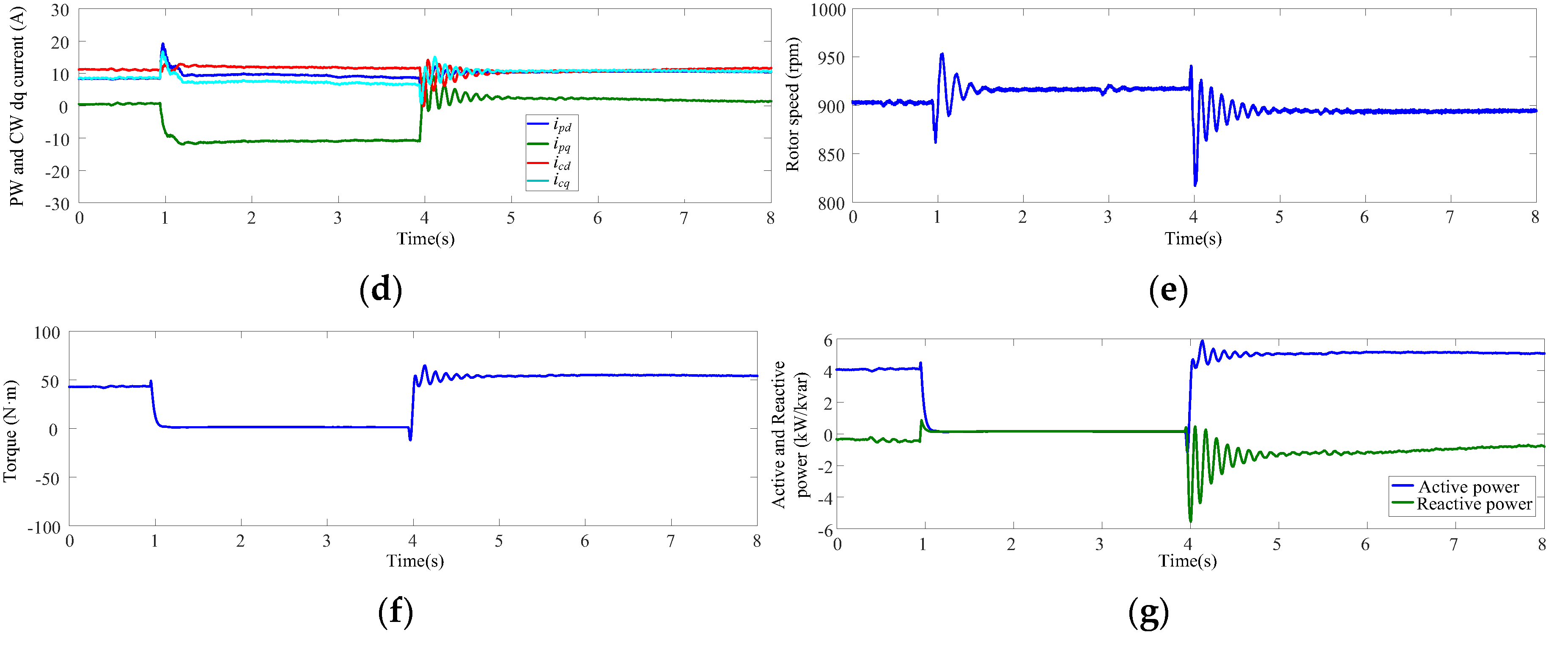
The system waveform under the optimal control strategy is shown in
Figure 9. As seen in
Figure 9b, the peak value of the PW current increases to 25.5 A from 8.5 A and stabilizes after three cycles at 15 A.
Figure 9c shows that the oscillations in the CW current cease after a period, and the stable value is the same as the rated value. Its maximum amplitude is only 1.7 times its rated value of 25 A. That is, the current of the converter does not exceed two times the rated value, which is within the bearing range of the IGBT.
Figure 9d shows that
ipd increases to 16 A from 8.5 A, and
icq increases to 12 A from 7.5 A. However, they quickly stabilize. Then,
ipq drops to −9 A from 0 A but can be quickly stabilized. Furthermore,
icd changes very little and stays near 12.5 A. Finally,
Figure 9e demonstrates that the maximum rotor speed
ωr reaches 960 rpm, and the minimum speed is 870 rpm.
Figure 9f shows a minor fluctuation in the torque
Te.
Figure 9g shows that the fluctuation in the PW’s active and reactive power is small.
Comparing
Figure 9 and
Figure 10, it can be observed that the optimal control and flux linkage tracking control are comparable. The dynamic performance indicators of the PI control, flux linkage tracking, and optimal control are shown in
Table 2. The numerical values of the PI and optimal control methods are on the left and right, respectively.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}