
State of Health Estimation Procedure for Lithium-Ion Batteries Using Partial Discharge Data and Support Vector Regression




Abstract
:1. Introduction
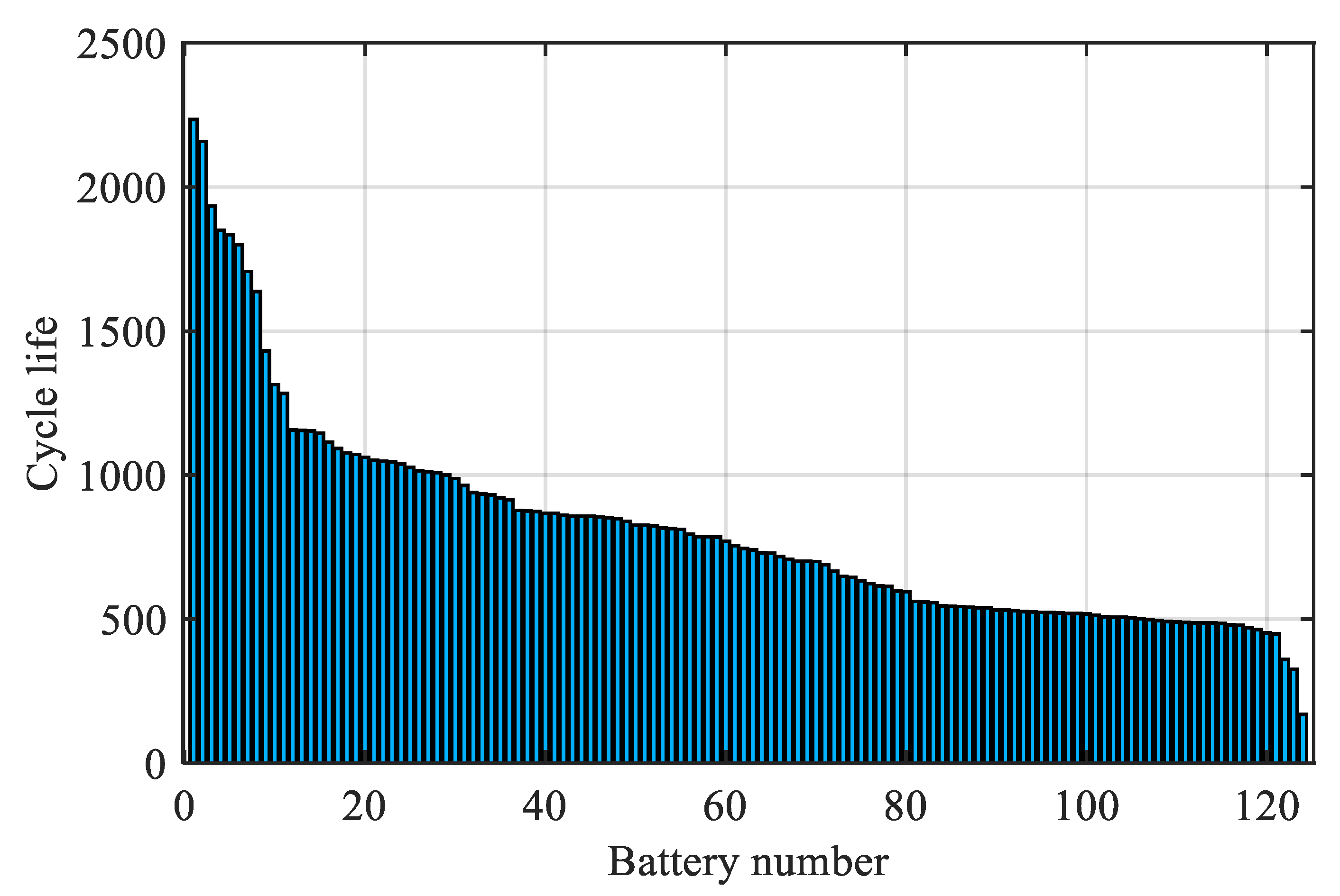
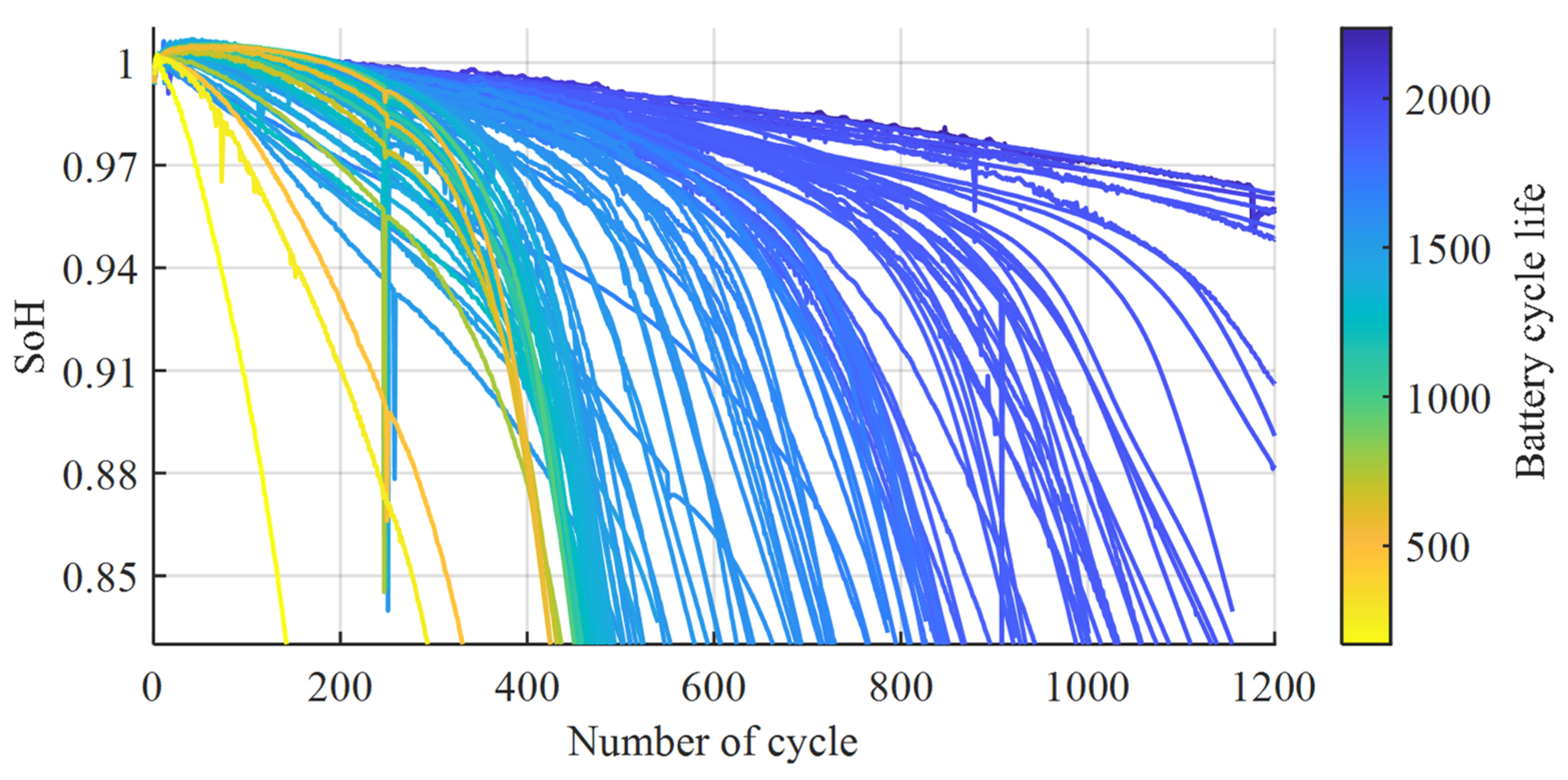
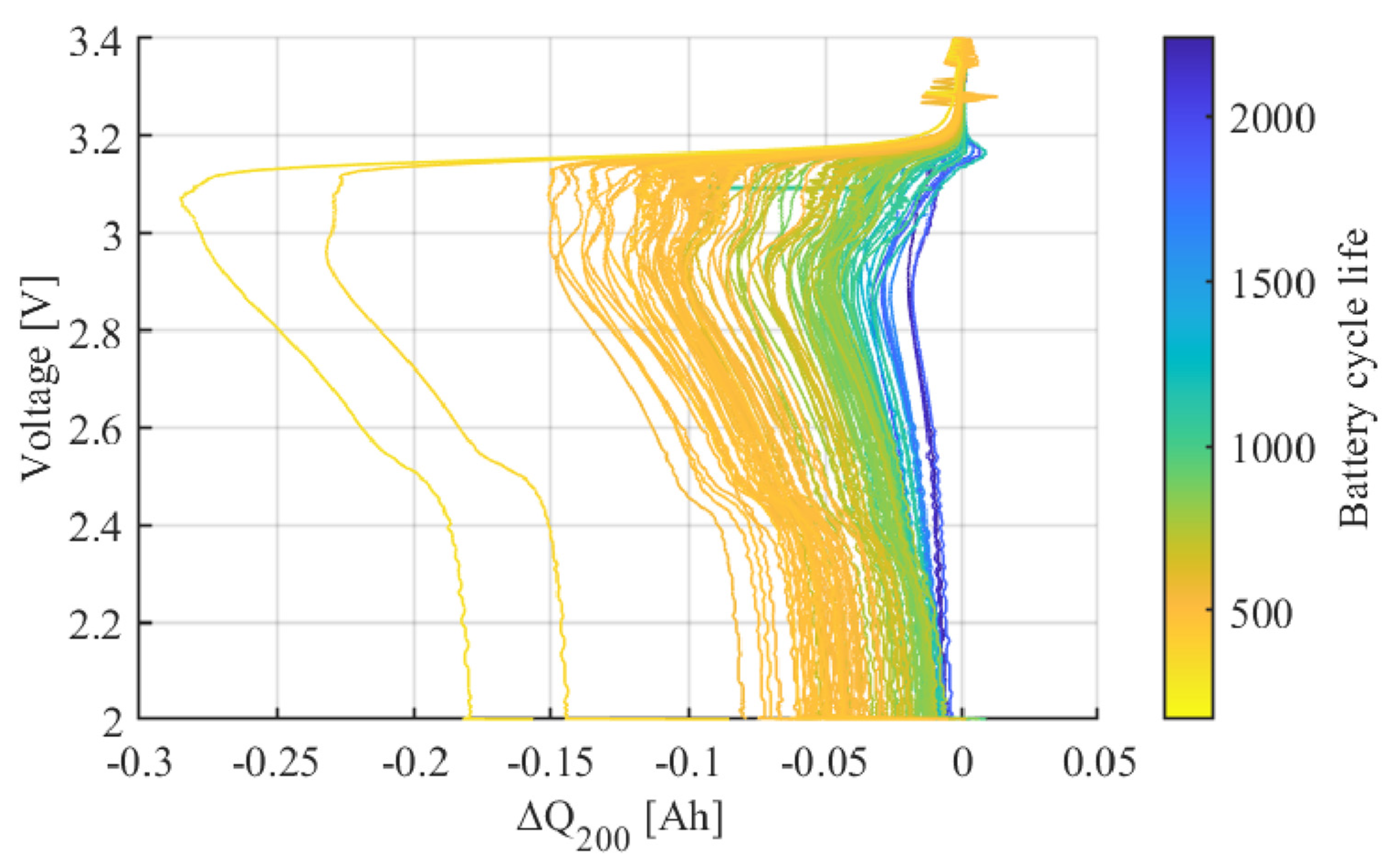
2. Dataset
3. Proposed Approach
3.1. Support Vector Regression
3.2. Feature Selection Procedure
4. Results and Discussion
4.1. Experimental Procedure and Full Discharge Window Approach
- n—number of observations;
- yi—target value of SoH;
- f(xi)—predicted value of SoH;
- —mean of the target values.
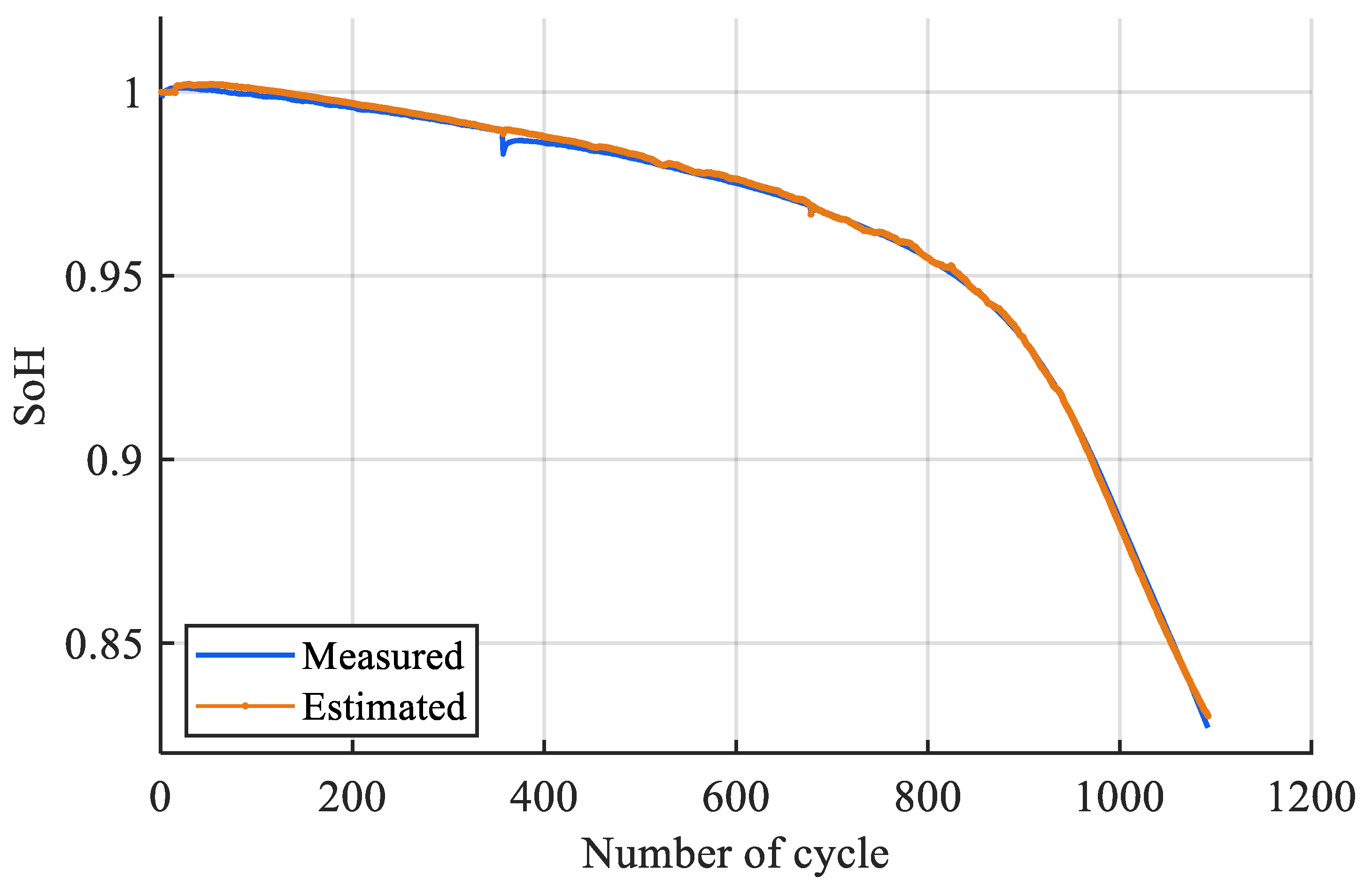
4.2. Partial Discharge Window Approach
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pelletier, S.; Jabali, O.; Laporte, G.; Veneroni, M. Battery Degradation and Behaviour for Electric Vehicles: Review and Numerical Analyses of Several Models. Transp. Res. Part B Methodol. 2017, 103, 158–187. [Google Scholar] [CrossRef]
- Cristaldi, L.; Faifer, M.; Laurano, C.; Ottoboni, R.; Petkovski, E.; Toscani, S. Power Generation Control Algorithm for the Participation of Photovoltaic Panels in Network Stability. IEEE Trans. Instrum. Meas. 2023, 72, 9000809. [Google Scholar] [CrossRef]
- Li, X.; Fan, G.; Rizzoni, G.; Canova, M.; Zhu, C.; Wei, G. A Simplified Multi-Particle Model for Lithium Ion Batteries Via a Predictor-Corrector Strategy and Quasi-Linearization. Energy 2016, 116, 154–169. [Google Scholar] [CrossRef]
- Petit, M.; Prada, E.; Sauvant-Moynot, V. Development of an Empirical Aging Model for Li-Ion Batteries and Application to Assess the Impact of Vehicle-to-Grid Strategies on Battery Lifetime. Appl. Energy 2016, 172, 398–407. [Google Scholar] [CrossRef]
- Barcellona, S.; Colnago, S.; Dotelli, G.; Latorrata, S.; Piegari, L. Aging Effect on the Variation of Li-Ion Battery Resistance as Function of Temperature and State of Charge. J. Energy Storage 2022, 50, 104658. [Google Scholar] [CrossRef]
- Xu, B.; Oudalov, A.; Ulbig, A.; Andersson, G.; Kirschen, D.S. Modeling of Lithium-Ion Battery Degradation for Cell Life Assessment. IEEE Trans. Smart Grid 2018, 9, 1131–1140. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Li, X.; Wang, Z. State of Health Estimation for Li-Ion Battery Using Incremental Capacity Analysis and Gaussian Process Regression. Energy 2020, 190, 116467. [Google Scholar] [CrossRef]
- Cui, Z.; Wang, C.; Gao, X.; Tian, S. State of Health Estimation for Lithium-Ion Battery Based on the Coupling-Loop Nonlinear Autoregressive with Exogenous Inputs Neural Network. Electrochim. Acta 2021, 393, 139047. [Google Scholar] [CrossRef]
- Cao, M.; Zhang, T.; Wang, J.; Liu, Y. A Deep Belief Network Approach to Remaining Capacity Estimation for Lithium-Ion Batteries Based on Charging Process Features. J. Energy Storage 2022, 48, 103825. [Google Scholar] [CrossRef]
- Severson, K.A.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Fraggedakis, D.; et al. Data-Driven Prediction of Battery Cycle Life before Capacity Degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar] [CrossRef]
- Ansean, D.; Garcia, V.M.; Gonzalez, M.; Blanco-Viejo, C.; Viera, J.C.; Pulido, Y.F.; Sanchez, L. Lithium-Ion Battery Degradation Indicators Via Incremental Capacity Analysis. IEEE Trans. Ind. Appl. 2019, 55, 2992–3002. [Google Scholar] [CrossRef]
- He, J.; Wei, Z.; Bian, X.; Yan, F. State-of-Health Estimation of Lithium-Ion Batteries Using Incremental Capacity Analysis Based on Voltage–Capacity Model. IEEE Trans. Transp. Electrif. 2020, 6, 417–426. [Google Scholar] [CrossRef]
- Zhou, R.; Zhu, R.; Huang, C.-G.; Peng, W. State of Health Estimation for Fast-Charging Lithium-Ion Battery Based on Incremental Capacity Analysis. J. Energy Storage 2022, 51, 104560. [Google Scholar] [CrossRef]
- Richardson, R.R.; Birkl, C.R.; Osborne, M.A.; Howey, D.A. Gaussian Process Regression for In Situ Capacity Estimation of Lithium-Ion Batteries. IEEE Trans. Ind. Inform. 2019, 15, 127–138. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Gaussian Process Regression for Forecasting Battery State of Health. J. Power Sources 2017, 357, 209–219. [Google Scholar] [CrossRef]
- Jia, J.; Liang, J.; Shi, Y.; Wen, J.; Pang, X.; Zeng, J. SOH and RUL Prediction of Lithium-Ion Batteries Based on Gaussian Process Regression with Indirect Health Indicators. Energies 2020, 13, 375. [Google Scholar] [CrossRef]
- Barcellona, S.; Cristaldi, L.; Faifer, M.; Petkovski, E.; Piegari, L.; Toscani, S. State of Health Prediction of Lithium-Ion Batteries. In Proceedings of the 2021 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4.0 & IoT), Rome, Italy, 7–9 June 2021; pp. 12–17. [Google Scholar]
- Lashgari, F.; Petkovski, E.; Cristaldi, L. State of Health Analysis for Lithium-Ion Batteries Considering Temperature Effect. In Proceedings of the 2022 IEEE International Workshop on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE 2022-Proceedings), Rome, Italy, 26–28 October; pp. 40–45. [CrossRef]
- Weng, C.; Sun, J.; Peng, H. Model Parametrization and Adaptation Based on the Invariance of Support Vectors With Applications to Battery State-of-Health Monitoring. IEEE Trans. Veh. Technol. 2015, 64, 3908–3917. [Google Scholar] [CrossRef]
- Feng, X.; Weng, C.; He, X.; Han, X.; Lu, L.; Ren, D.; Ouyang, M. Online State-of-Health Estimation for Li-Ion Battery Using Partial Charging Segment Based on Support Vector Machine. IEEE Trans. Veh. Technol. 2019, 68, 8583–8592. [Google Scholar] [CrossRef]
- Marri, I.; Petkovski, E.; Cristaldi, L.; Faifer, M. Lithium-Ion Batteries Soh Estimation, Based on Support-Vector Regression and a Feature-Based Approach. In Proceedings of the 18th IMEKO TC10 Conference on Measurement for Diagnostic, Optimisation and Control to Support Sustainability and Resilience 2022, Warsaw, Poland, 26–27 September 2022; pp. 109–113. [Google Scholar]
- Marri, I.; Petkovski, E.; Cristaldi, L.; Faifer, M. Comparing Machine Learning Strategies for SoH Estimation of Lithium-Ion Batteries Using a Feature-Based Approach. Energies 2023, 16, 4423. [Google Scholar] [CrossRef]
- Wen, J.; Chen, X.; Li, X.; Li, Y. SOH Prediction of Lithium Battery Based on IC Curve Feature and BP Neural Network. Energy 2022, 261, 125234. [Google Scholar] [CrossRef]
- Tian, Y.; Dong, Q.; Tian, J.; Li, X.; Kukkapalli, V.K.; Kim, S.; Thomas, S.A. Capacity Estimation of Lithium-Ion Batteries Based on Multiple Small Voltage Sections and BP Neural Networks. Energies 2023, 16, 674. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Liu, X.; Wang, Y.; Zhang, L. Lithium-Ion Battery Capacity Estimation—A Pruned Convolutional Neural Network Approach Assisted with Transfer Learning. Appl. Energy 2021, 285, 116410. [Google Scholar] [CrossRef]
- Catelani, M.; Ciani, L.; Fantacci, R.; Patrizi, G.; Picano, B. Remaining Useful Life Estimation for Prognostics of Lithium-Ion Batteries Based on Recurrent Neural Network. IEEE Trans. Instrum. Meas. 2021, 70, 3524611. [Google Scholar] [CrossRef]
- Marri, I.; Petkovski, E.; Cristaldi, L.; Faifer, M. Battery Remaining Useful Life Prediction Supported by Long Short-Term Memory Neural Network. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Kuala Lumpur, Malaysia, 22–25 May 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Qu, J.; Liu, F.; Ma, Y.; Fan, J. A Neural-Network-Based Method for RUL Prediction and SOH Monitoring of Lithium-Ion Battery. IEEE Access 2019, 7, 87178–87191. [Google Scholar] [CrossRef]
- Tan, Y.; Zhao, G. Transfer Learning with Long Short-Term Memory Network for State-of-Health Prediction of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2020, 67, 8723–8731. [Google Scholar] [CrossRef]
- Wang, S.; Takyi-Aninakwa, P.; Jin, S.; Yu, C.; Fernandez, C.; Stroe, D.-I. An Improved Feedforward-Long Short-Term Memory Modeling Method for the Whole-Life-Cycle State of Charge Prediction of Lithium-Ion Batteries Considering Current-Voltage-Temperature Variation. Energy 2022, 254, 124224. [Google Scholar] [CrossRef]
- Wang, S.; Wu, F.; Takyi-Aninakwa, P.; Fernandez, C.; Stroe, D.-I.; Huang, Q. Improved Singular Filtering-Gaussian Process Regression-Long Short-Term Memory Model for Whole-Life-Cycle Remaining Capacity Estimation of Lithium-Ion Batteries Adaptive to Fast Aging and Multi-Current Variations. Energy 2023, 284, 128677. [Google Scholar] [CrossRef]
- Toyota Research Institute. Experimental Data Platform. 2021. Available online: https://data.matr.io/1/ (accessed on 1 September 2023).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Set | Features | Mean CV R2 |
|---|---|---|
| A | Ftr1, Ftr2, Ftr3 | 0.968 |
| B | Ftr1, Ftr3 | 0.970 |
| C | Ftr2, Ftr3 | 0.961 |
| Voltage Range (V) | Feature Set A | Feature Set B | Feature Set C |
|---|---|---|---|
| Full window (2–3.4) | 0.9686 | 0.9705 | 0.9620 |
| 3–3.4 | 0.8852 | 0.9572 | 0.9538 |
| 3.15–3.4 | 0.8992 | 0.8306 | 0.8777 |
| 3.25–3.4 | 0.8517 | 0.7894 | 0.8195 |
| 3–3.2 | 0.9624 | 0.9645 | 0.9536 |
| 3–3.1 | 0.9429 | 0.3904 | 0.9531 |
| 3–3.05 | 0.9608 | 0.3883 | 0.9646 |
| 2.8–3 | 0.9691 | 0.4715 | 0.9705 |
| 2.9–3 | 0.9657 | 0.3932 | 0.9705 |
| 2.4–2.6 | 0.9774 | 0.3944 | 0.9699 |
| 2.2–2.4 | 0.9772 | 0.3269 | 0.9741 |
| Voltage Range (V) | BC | KS | Epsilon | Kernel | Feature Set |
|---|---|---|---|---|---|
| Full window (2–3.4) | 0.0055 | 1.0 | 0.0021 | Gaussian | B |
| 3–3.4 | 0.0055 | 1.0 | 0.0005 | Gaussian | B |
| 3.15–3.4 | 1.100 | 2.0 | 0.0001 | Gaussian | A |
| 3.25–3.4 | 0.022 | 1.0 | 0.0021 | Gaussian | A |
| 3–3.2 | 0.0055 | 1.0 | 0.0001 | Gaussian | B |
| 3–3.1 | 0.0055 | 1.0 | 0.0010 | Gaussian | C |
| 3–3.05 | 0.0055 | 1.0 | 0.0021 | Gaussian | C |
| 2.8–3 | 0.0055 | 1.0 | 0.00005 | Gaussian | C |
| 2.9–3 | 0.0055 | 1.0 | 0.0010 | Gaussian | C |
| 2.4–2.6 | 0.1100 | 2.0 | 0.0010 | Gaussian | A |
| 2.2–2.4 | 0.1100 | 2.0 | 0.0005 | Gaussian | A |
| Voltage Range (V) | Fold 1 | Fold 2 | Fold 3 | Fold 4 | Fold 5 | Mean |
|---|---|---|---|---|---|---|
| Full window (2–3.4) | 0.9578 | 0.9682 | 0.9891 | 0.9836 | 0.9816 | 0.9761 |
| 3–3.4 | 0.9337 | 0.9554 | 0.9799 | 0.9651 | 0.9701 | 0.9609 |
| 3.15–3.4 | 0.8672 | 0.9109 | 0.8994 | 0.9135 | 0.9301 | 0.9042 |
| 3.25–3.4 | 0.8063 | 0.8206 | 0.9146 | 0.8717 | 0.8495 | 0.8525 |
| 3–3.2 | 0.9479 | 0.9589 | 0.9846 | 0.9745 | 0.9707 | 0.9673 |
| 3–3.1 | 0.9453 | 0.9113 | 0.9784 | 0.9749 | 0.9735 | 0.9567 |
| 3–3.05 | 0.9509 | 0.9614 | 0.9816 | 0.9753 | 0.9742 | 0.9687 |
| 2.8–3 | 0.9585 | 0.9652 | 0.9857 | 0.9804 | 0.9802 | 0.9740 |
| 2.9–3 | 0.9581 | 0.9653 | 0.9855 | 0.9800 | 0.9797 | 0.9737 |
| 2.4–2.6 | 0.9784 | 0.9722 | 0.9842 | 0.9893 | 0.9866 | 0.9821 |
| 2.2–2.4 | 0.9760 | 0.9718 | 0.9893 | 0.9850 | 0.9865 | 0.9818 |
| Full Window | 3–3.4 | 3.25–3.4 | 3.15–3.4 | 3–3.2 | 3–3.1 | 3–3.05 | 2.8–3 | 2.9–3 | 2.4–2.6 | 2.2–2.4 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| T1 | 0.9834 | 0.9434 | 0.618 | 0.5622 | 0.9514 | 0.9548 | 0.9644 | 0.9744 | 0.9752 | 0.9874 | 0.9839 |
| T2 | 0.9832 | 0.9371 | 0.9826 | 0.8765 | 0.9527 | 0.9512 | 0.9530 | 0.9665 | 0.9660 | 0.9913 | 0.9970 |
| T3 | 0.9945 | 0.9901 | 0.9915 | 0.9734 | 0.9908 | 0.9914 | 0.9906 | 0.9914 | 0.9915 | 0.9954 | 0.9919 |
| T4 | 0.7938 | 0.7817 | 0.7788 | 0.7452 | 0.7598 | 0.7689 | 0.7855 | 0.8038 | 0.8043 | 0.8103 | 0.8133 |
| T5 | 0.9813 | 0.9869 | 0.9851 | 0.8784 | 0.9835 | 0.9887 | 0.9869 | 0.9853 | 0.9856 | 0.9782 | 0.9704 |
| T6 | 0.9771 | 0.9773 | 0.9678 | 0.7470 | 0.8824 | 0.9737 | 0.9717 | 0.9709 | 0.9718 | 0.9905 | 0.9948 |
| T7 | 0.9480 | 0.8937 | 0.7668 | 0.8838 | 0.9007 | 0.9216 | 0.9305 | 0.9465 | 0.9471 | 0.9924 | 0.9910 |
| T8 | 0.9976 | 0.9771 | 0.6677 | 0.9613 | 0.9978 | 0.9783 | 0.9771 | 0.9966 | 0.9952 | 0.9987 | 0.9996 |
| T9 | 0.9945 | 0.9825 | 0.9500 | 0.9521 | 0.9900 | 0.9896 | 0.9896 | 0.9924 | 0.9924 | 0.9970 | 0.9977 |
| T10 | 0.9963 | 0.9796 | 0.8633 | 0.8468 | 0.9775 | 0.9925 | 0.9937 | 0.9967 | 0.9967 | 0.9881 | 0.9995 |
| T11 | 0.9992 | 0.9985 | 0.8278 | 0.9964 | 0.9992 | 0.9990 | 0.9988 | 0.9993 | 0.9992 | 0.9981 | 0.9993 |
| T12 | 0.9709 | 0.9533 | 0.8923 | 0.961 | 0.9361 | 0.9427 | 0.9455 | 0.9554 | 0.9537 | 0.9962 | 0.9891 |
| T13 | 0.8234 | 0.8126 | 0.5329 | 0.6732 | 0.7952 | 0.8133 | 0.8196 | 0.8133 | 0.8089 | 0.8735 | 0.8706 |
| T14 | 0.9925 | 0.9763 | 0.9929 | 0.9503 | 0.9782 | 0.9796 | 0.9805 | 0.9886 | 0.9885 | 0.9984 | 0.9987 |
| T15 | 0.9944 | 0.9809 | 0.8917 | 0.9505 | 0.9856 | 0.9835 | 0.9856 | 0.9872 | 0.9880 | 0.9958 | 0.9954 |
| Mean | 0.9620 | 0.9447 | 0.8473 | 0.8639 | 0.9387 | 0.9486 | 0.9515 | 0.9579 | 0.9576 | 0.9727 | 0.9728 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petkovski, E.; Marri, I.; Cristaldi, L.; Faifer, M. State of Health Estimation Procedure for Lithium-Ion Batteries Using Partial Discharge Data and Support Vector Regression. Energies 2024, 17, 206. https://doi.org/10.3390/en17010206
Petkovski E, Marri I, Cristaldi L, Faifer M. State of Health Estimation Procedure for Lithium-Ion Batteries Using Partial Discharge Data and Support Vector Regression. Energies. 2024; 17(1):206. https://doi.org/10.3390/en17010206
Chicago/Turabian StylePetkovski, Emil, Iacopo Marri, Loredana Cristaldi, and Marco Faifer. 2024. "State of Health Estimation Procedure for Lithium-Ion Batteries Using Partial Discharge Data and Support Vector Regression" Energies 17, no. 1: 206. https://doi.org/10.3390/en17010206
APA StylePetkovski, E., Marri, I., Cristaldi, L., & Faifer, M. (2024). State of Health Estimation Procedure for Lithium-Ion Batteries Using Partial Discharge Data and Support Vector Regression. Energies, 17(1), 206. https://doi.org/10.3390/en17010206