
Comparative Study of the Transmission Capacity of Grid-Forming Converters and Grid-Following Converters

 , and
, and
Abstract
1. Introduction
2. Static Stability Limit of the Converter’s Power Transmission
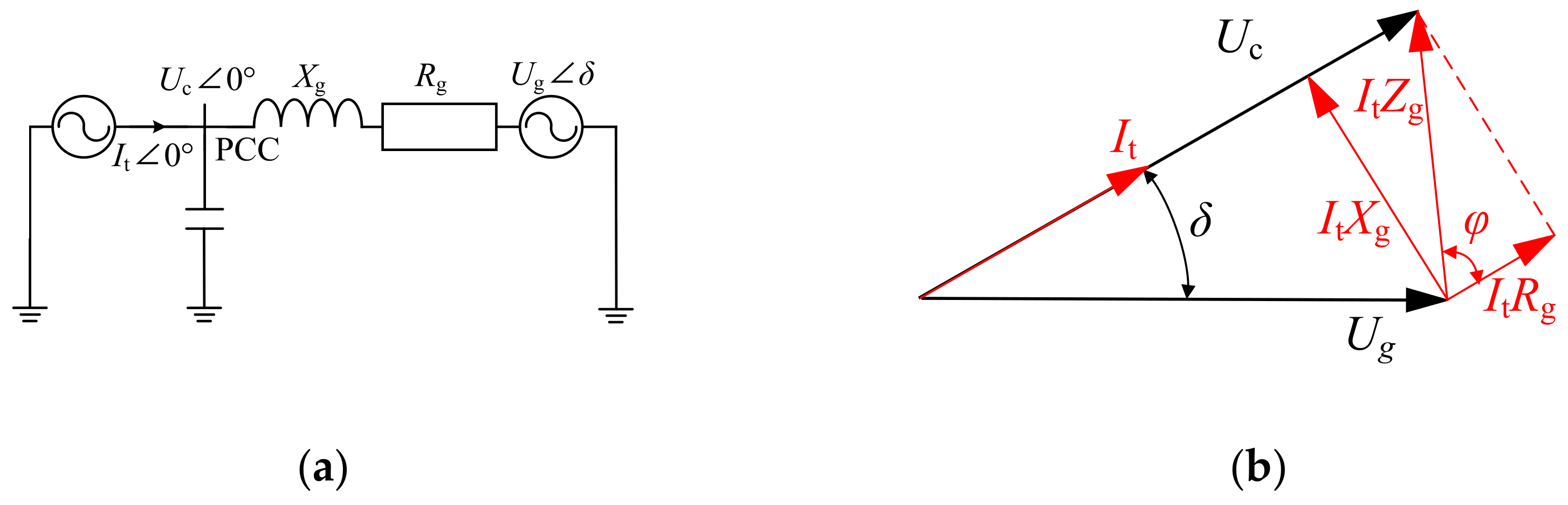
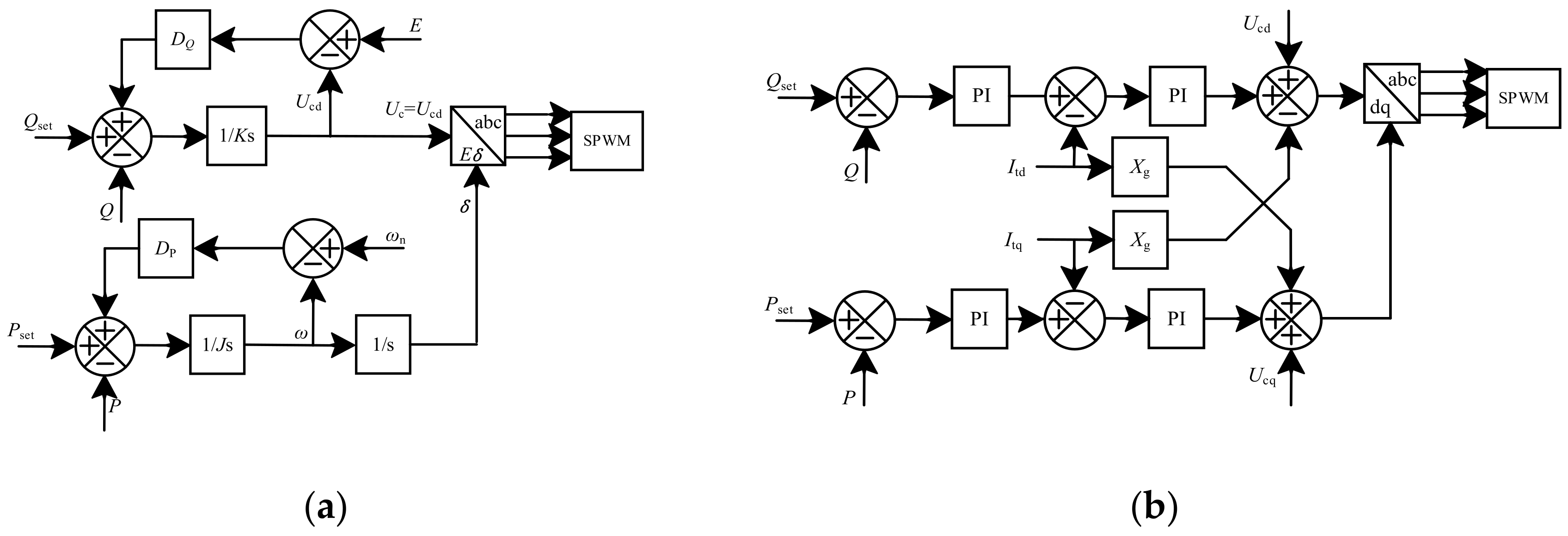
2.1. Equivalent Circuit of the GFM Converter
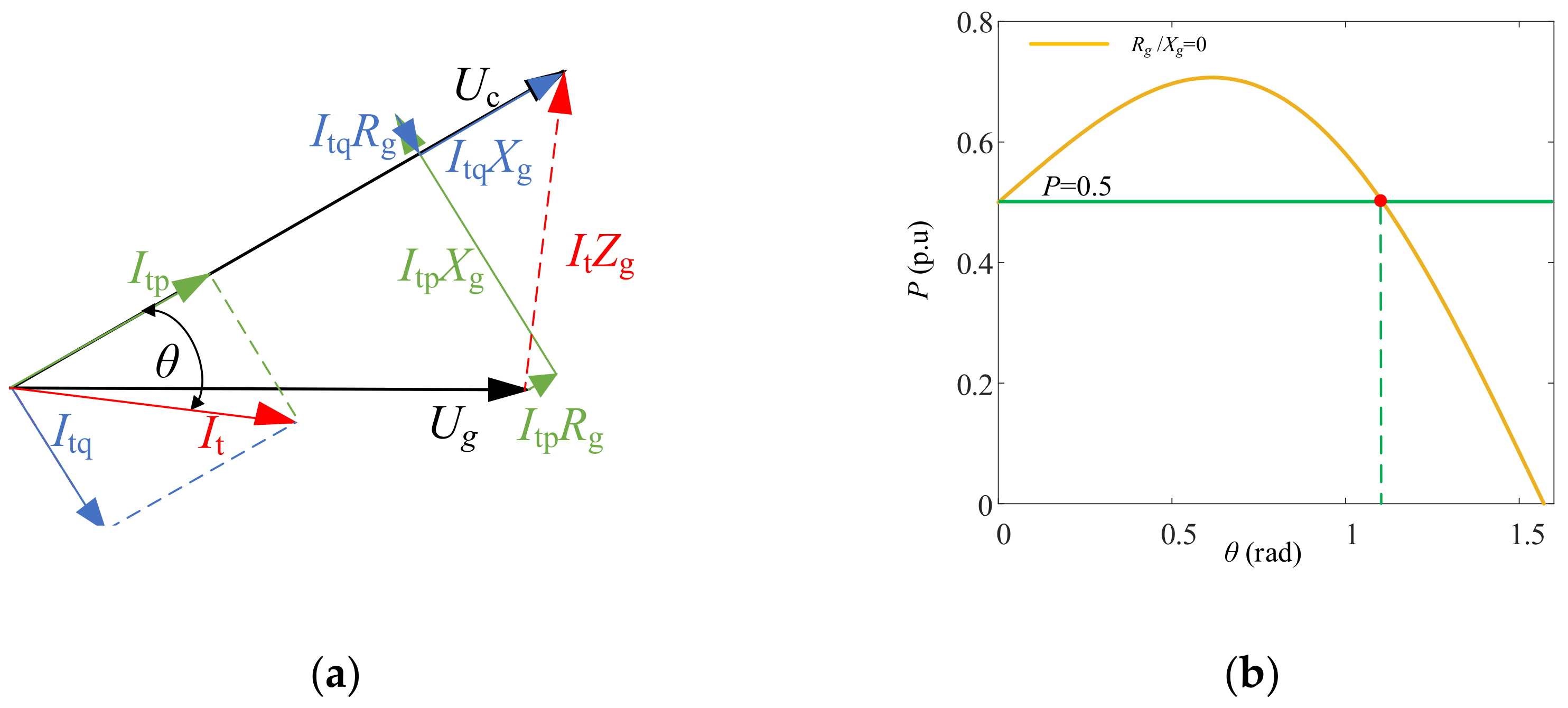
2.2. Equivalent Circuit of the GFL Converter
3. Relationship between Static Power Transmission of the Converter and Grid Strength
3.1. Influence of Power Grid Strength Variation on the Steady Working Area of the System
3.2. Influence of Power Grid Strength on the Power Transmission of Converters
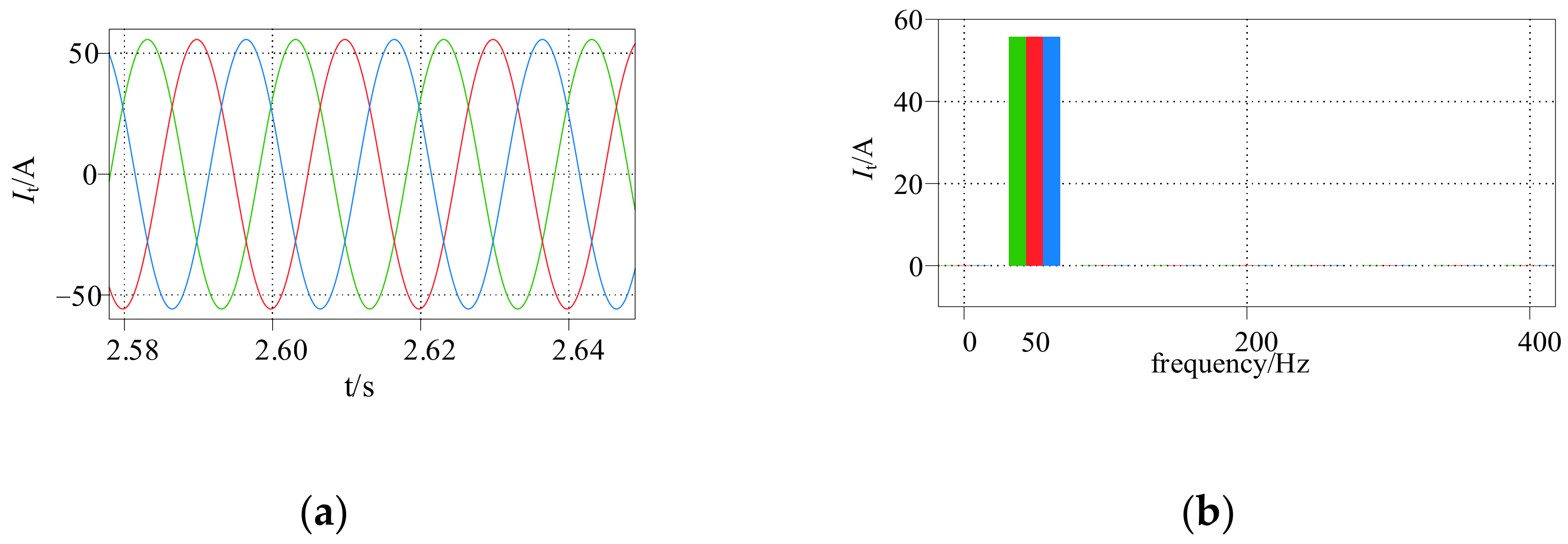
4. Simulation Waveform Analysis
4.1. Simulation of GFM Converter Power Transfer When SCR = 4.84
4.2. Simulation of GFL Converter Power Transfer When SCR = 4.84
4.3. Comparison of the Power Transfer Capability of Converters at Strong and Weak Grid Strengths
4.4. Hardware in-Loop Simulation Using RTBOX1
5. Conclusions
- There is a quantitative relationship between the statically stable power transmission limit and the line impedance of GFM and GFL converters at a unity power factor. At variable power factors, the converters can even transmit active rated power sufficiently. For high-voltage grids, the reactance, Xg, increases; its impedance modulus, Zg, increases. SCR decreases, Pmax decreases, and the operating range is reduced. However, when Xg increases, its impedance angle, φ, increases, and Pmax increases, but the impact of φ on the transmission capacity is much smaller than that of Zg. Therefore, the larger the impedance, the smaller the Pmax; thus, the two are approximately inversely related.
- The grid strength of a system is determined by SCR, which is jointly influenced by Zg and the rated transmission power of the converter. When the reactance of PCC to ground is much greater than Xg, the Pmax values of GFM and GFL converters are equal, and it can be considered that the grid strength is only related to Xg, i.e., the greater the grid strength, the greater the Pmax.
- Within Pmax (in a steady working area), GFM converters are more suitable for weak grids because of the power coupling problem, which is more obvious in strong grids, whereas GFL converters are more suitable for strong grids because of the monotonic nature of the current in the P–It curve. Moreover, in smoothing power transfer, the parameters of GFM converters, which require virtual impedance settings, make them more suitable for weak grid regulation because they are prone to high-frequency oscillations under strong grids. GFL converters, however, with their parameters of time constants and PI controllers, are more suitable for the regulation of strong grids because they are prone to overshooting oscillations in weak grids.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, C.; Zheng, Z.; Ma, X.; Yan, H.; Wang, M.; Fan, Z. Research on the influence of resilient grid learning ability on power system. Energy Rep. 2022, 8, 43–50. [Google Scholar] [CrossRef]
- Granata, S.; Di Benedetto, M.; Terlizzi, C.; Leuzzi, R.; Bifaretti, S.; Zanchetta, P. Power Electronics Converters for the Internet of Energy: A Review. Energies 2022, 15, 2604. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M. Small-signal stability assessment of power electronics based power systems: A discussion of impedance-and eigenvalue-based methods. IEEE Trans. Ind. Appl. 2017, 53, 5014–5030. [Google Scholar] [CrossRef]
- Iioka, D.; Kusano, K.; Matsuura, T.; Hamada, H.; Miyazaki, T. Appropriate Volt–Var Curve Settings for PV Inverters Based on Distribution Network Characteristics Using Match Rate of Operating Point. Energies 2022, 15, 1375. [Google Scholar] [CrossRef]
- Khan, S.A.; Wang, M.; Su, W.; Liu, G.; Chaturvedi, S. Grid-Forming Converters for Stability Issues in Future Power Grids. Energies 2022, 15, 4937. [Google Scholar] [CrossRef]
- Yap, K.Y.; Sarimuthu, C.R.; Lim, J.M.-Y. Virtual Inertia-Based Inverters for Mitigating Frequency Instability in Grid-Connected Renewable Energy System: A Review. Appl. Sci. 2019, 9, 5300. [Google Scholar] [CrossRef]
- Vadi, S.; Padmanaban, S.; Bayindir, R.; Blaabjerg, F.; Mihet-Popa, L. A Review on Optimization and Control Methods Used to Provide Transient Stability in Microgrids. Energies 2019, 12, 3582. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, Z.; Li, Y. A Critical Review of Data-Driven Transient Stability Assessment of Power Systems: Principles, Prospects and Challenges. Energies 2021, 14, 7238. [Google Scholar] [CrossRef]
- Hosseinzadeh, N.; Aziz, A.; Mahmud, A.; Gargoom, A.; Rabbani, M. Voltage Stability of Power Systems with Renewable-Energy Inverter-Based Generators: A Review. Electronics 2021, 10, 115. [Google Scholar] [CrossRef]
- Pattabiraman, D.; Lasseter, R.H.; Jahns, T.M. Comparison of grid following and grid forming control for a high inverter penetration power system. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Poolla, B.K.; Groß, D.; Dörfler, F. Placement and implementation of grid-forming and grid-following virtual inertia and fast frequency response. IEEE Trans. Power Syst. 2019, 34, 3035–3046. [Google Scholar] [CrossRef]
- Awal, M.A.; Husain, I. Unified virtual oscillator control for grid-forming and grid-following converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4573–4586. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Y.; Wang, S.; Chen, J.; Gong, C. Impedance-phased dynamic control method for grid-connected inverters in a weak grid. IEEE Trans. Power Electron. 2016, 32, 274–283. [Google Scholar] [CrossRef]
- Yang, D.; Wang, X.; Liu, F.; Xin, K.; Liu, Y.; Blaabjerg, F. Adaptive reactive power control of PV power plants for improved power transfer capability under ultra-weak grid conditions. IEEE Trans. Smart Grid 2017, 10, 1269–1279. [Google Scholar] [CrossRef]
- Kang, Y.; Lin, X.; Zheng, Y.; Quan, X.L.; Hu, J.B.; Yuan, S. The static stable-limit and static stable-working zone for single-machine infinite-bus system of renewable-energy grid-connected converter. Proc. CSEE 2020, 40, 4506–4515. [Google Scholar]
- Chen, M.; Zhou, D.; Tayyebi, A.; Prieto-Araujo, E.; Dörfler, F.; Blaabjerg, F. Generalized multivariable grid-forming control design for power converters. IEEE Trans. Smart Grid 2022, 13, 2873–2885. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase Voltage Ug (V) | Rg (Ω) | Xg (Ω) | SCR | Pmax (W) |
|---|---|---|---|---|
| 220 | 0.1 | 0.50 | 29.04 | 145,200 |
| 3.00 10.00 | 4.84 | 25,000 | ||
| 1.45 | 7300 |
| J/(kg·m2) | Dp | Dq | K |
|---|---|---|---|
| 0.057 | 5 | 321 | 7.1 |
| Kp_PLL | Ki_PLL | Kp_i | Ki_i |
|---|---|---|---|
| 0.7978 | 99.0138 | 0.0043 | 0.7143 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, B.; Zhu, J.; Wang, S.; Xu, X.; Jin, X.; Yin, J.; Wang, J. Comparative Study of the Transmission Capacity of Grid-Forming Converters and Grid-Following Converters. Energies 2023, 16, 2594. https://doi.org/10.3390/en16062594
Kong B, Zhu J, Wang S, Xu X, Jin X, Yin J, Wang J. Comparative Study of the Transmission Capacity of Grid-Forming Converters and Grid-Following Converters. Energies. 2023; 16(6):2594. https://doi.org/10.3390/en16062594
Chicago/Turabian StyleKong, Bojun, Jian Zhu, Shengbo Wang, Xingmin Xu, Xiaokuan Jin, Junjie Yin, and Jianhua Wang. 2023. "Comparative Study of the Transmission Capacity of Grid-Forming Converters and Grid-Following Converters" Energies 16, no. 6: 2594. https://doi.org/10.3390/en16062594
APA StyleKong, B., Zhu, J., Wang, S., Xu, X., Jin, X., Yin, J., & Wang, J. (2023). Comparative Study of the Transmission Capacity of Grid-Forming Converters and Grid-Following Converters. Energies, 16(6), 2594. https://doi.org/10.3390/en16062594