
Design and Optimization of a Magnetic Field Exciter for Controlling Magnetorheological Fluid in a Hybrid Soft-Rigid Jaw Gripper


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Research Object
2.2. FEM Model of the Magnetic Circuit
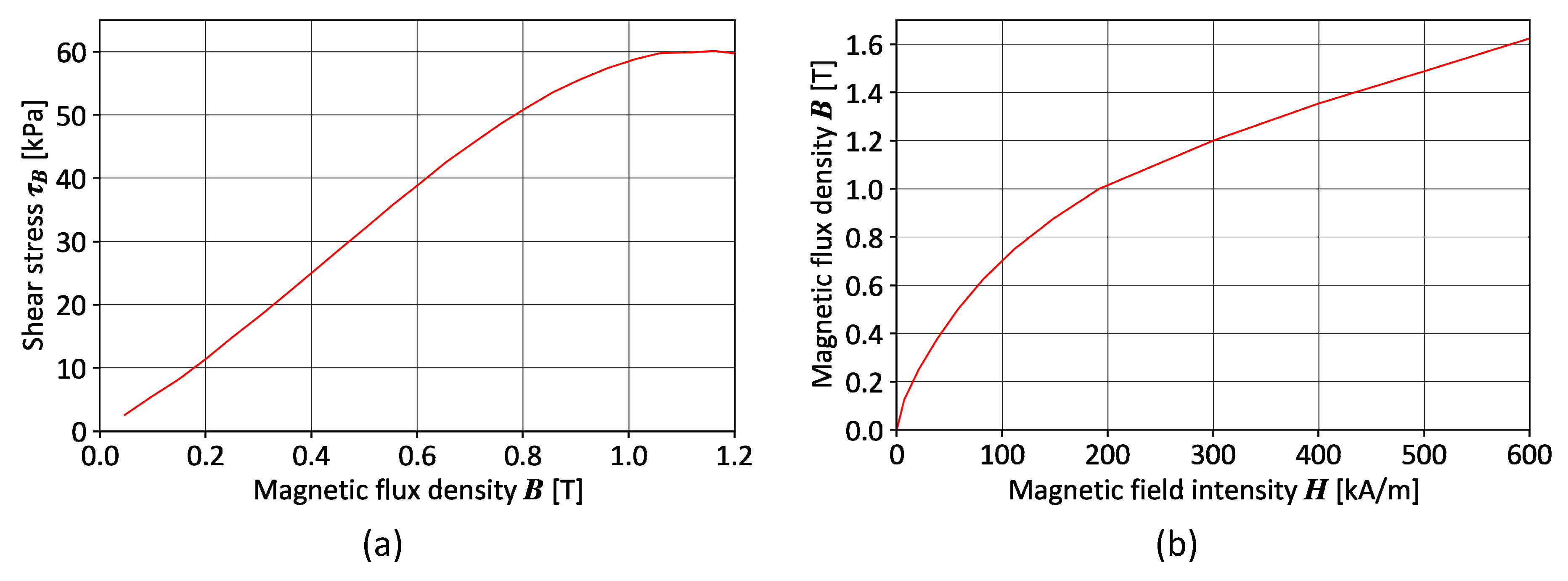
2.3. MRF Used in Simulations
2.4. Conditions under Consideration
3. Results
3.1. Influence of Magnet Thickness gm
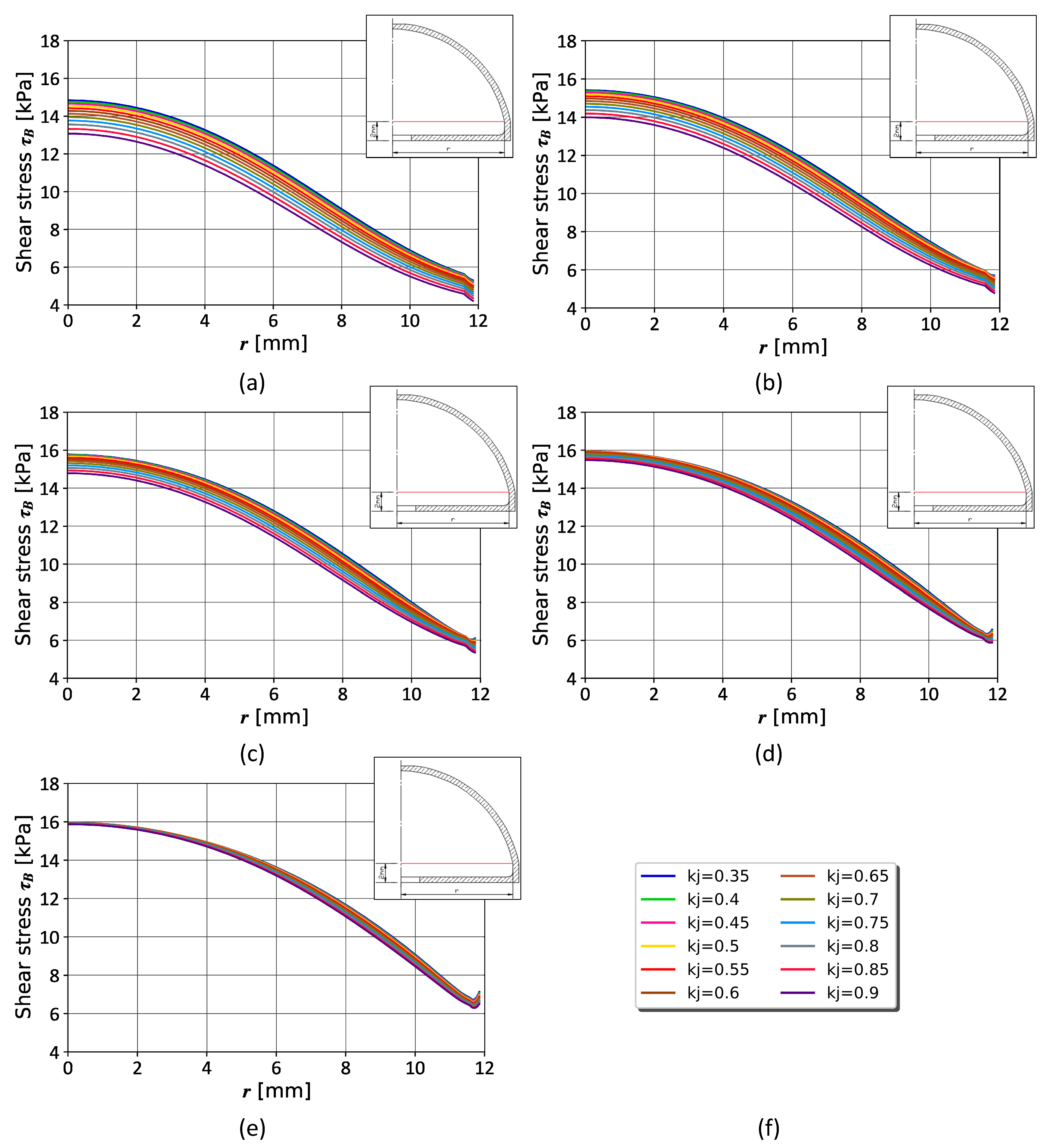
3.2. Analysis of Parameters kpm and kj
3.3. Assessment of the Average Stress Distribution
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, K.; Tian, Y. Numerical investigation of a bioinspired multi-segment soft pneumatic actuator for grasping applications. Mater. Today Commun. 2022, 31, 103449. [Google Scholar] [CrossRef]
- Zhu, Y.; Chu, K.; Chen, X.; Wang, X.; Su, H. Research and application of a multi-degree-of-freedom soft actuator. Sens. Actuators A Phys. 2022, 338, 113492. [Google Scholar] [CrossRef]
- Lee, D.; Jahanbin, R.; Rahman, S. Robust design optimization by spline dimensional decomposition. Probab. Eng. Mech. 2022, 68, 103218. [Google Scholar] [CrossRef]
- Yu, Q.; Jiang, M.; Gravish, N. Flexoskeleton Fingers: 3D Printed Reconfigurable Ridges Enabling Multi-Functional and Low-Cost Underactuated Grasping. IEEE Robot. Autom. Lett. 2021, 6, 3971–3978. [Google Scholar] [CrossRef]
- Terrile, S.; Argüelles, M.; Barrientos, A. Comparison of Different Technologies for Soft Robotics Grippers. Sensors 2021, 21, 3253. [Google Scholar] [CrossRef] [PubMed]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft Manipulators and Grippers: A Review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Z.; Liu, W.; Huang, G.; Jiang, Y.; Chen, D. Configuration Design and Verification of Soft-Rigid Hybrid Hand with Ab/Adduction Movement. In Advances in Mechanical Design; Springer: Singapore, 2021. [Google Scholar]
- Choi, H.; Koç, M. Design and feasibility tests of a flexible gripper based on inflatable rubber pockets. Int. J. Mach. Tools Manuf. 2006, 46, 1350–1361. [Google Scholar] [CrossRef]
- Maruyama, R.; Watanabe, T.; Uchida, M. Delicate Grasping by Robotic Gripper with Incompressible Fluid-Based Deformable Fingertips. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5469–5474. [Google Scholar]
- Nishimura, T.; Suzuki, Y.; Tsuji, T.; Watanabe, T. Fluid Pressure Monitoring-Based Strategy for Delicate Grasping of Fragile Objects by A Robotic Hand with Fluid Fingertips. Sensors 2019, 19, 782. [Google Scholar] [CrossRef] [PubMed]
- Nishida, T.; Shigehisa, D.; Kawashima, N.; Tadakuma, K. Development of Universal Jamming Gripper with a Force Feedback Mechanism. In Proceedings of the 2014 Joint 7th International Conference on Soft Computing and Intelligent Systems (SCIS) and 15th International Symposium on Advanced Intelligent Systems (ISIS), Kitakyushu, Japan, 3–6 December 2014; pp. 242–246. [Google Scholar]
- Amend, J.R.; Brown, E.; Rodenberg, N.; Jaeger, H.M.; Lipson, H. A Positive Pressure Universal Gripper Based on the Jamming of Granular Material. IEEE Trans. Robot. 2012, 28, 341–350. [Google Scholar] [CrossRef]
- Cramer, J.; Cramer, M.; Demeester, E.; Kellens, K. Exploring the potential of magnetorheology in robotic grippers. Procedia CIRP 2018, 76, 127–132. [Google Scholar] [CrossRef]
- Pettersson, A.; Davis, S.; Gray, J.; Dodd, T.; Ohlsson, T. Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes. J. Food Eng. 2010, 98, 332–338. [Google Scholar] [CrossRef]
- Choi, Y.T.; Hartzell, C.; Leps, T.; Wereley, N.M. Gripping characteristics of an electromagnetically activated magnetorheological fluid-based gripper. AIP Adv. 2018, 8, 056701. [Google Scholar] [CrossRef]
- Nishida, T.; Okatani, Y.; Tadakuma, K. Development of Universal Robot Gripper Using MRα Fluid. Int. J. Hum. Robot. 2016, 13, 1650017. [Google Scholar] [CrossRef]
- Tsugami, Y.; Barbie, T.; Tadakuma, K.; Nishida, T. Development of universal parallel gripper using reformed magnetorheological fluid. In Proceedings of the 11th Asian control conference (ASCC) IEEE, Gold Coast, QLD, Australia, 17–20 December 2017; pp. 778–783. [Google Scholar] [CrossRef]
- Cramer, J.; Cramer, M.; Demeester, E.; Kellens, K. Simulation-driven parameter study of concentric Halbach cylinders for magnetorheological robotic grasping. J. Magn. Magn. Mater. 2022, 546, 168637. [Google Scholar] [CrossRef]
- Naimzad, A.; Ghodsi, M.; Hojjat, Y.; Maddah, A. MREs Development and Its Application on Miniature Gripper. In Proceedings of the 2011 International Conference on Advanced Materials Engineering, Cairo, Egypt, 1–3 October 2011. [Google Scholar]
- Skfivan, V.; Sodomka, O.; Mach, F. Magnetically Guided Soft Robotic Grippers. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, South Korea, 14–18 April 2019; pp. 126–130. [Google Scholar]
- Balak, R.; Mazumdar, Y.C. Bistable Valves for MR Fluid-Based Soft Robotic Actuation Systems. IEEE Robot. Autom. Lett. 2021, 6, 8285–8292. [Google Scholar] [CrossRef]
- Hartzell, C.M.; Choi, Y.-T.; Wereley, N.M.; Leps, T.J. Performance of a magnetorheological fluid-based robotic end effector. Smart Mater. Struct. 2019, 28, 035030. [Google Scholar] [CrossRef]
- Widodo, P.J.; Budiana, E.P.; Ubaidillah, U.; Imaduddin, F. Magnetically-Induced Pressure Generation in Magnetorheological Fluids under the Influence of Magnetic Fields. Appl. Sci. 2021, 11, 9807. [Google Scholar] [CrossRef]
- Özsoy, K.; Usal, M.R. A mathematical model for the magnetorheological materials and magneto reheological devices. Eng. Sci. Technol. Int. J. 2018, 21, 1143–1151. [Google Scholar] [CrossRef]
- Salloom, M.Y.; Samad, Z. Finite element modeling and simulation of proposed design magneto-rheological valve. Int. J. Adv. Manuf. Technol. 2011, 54, 421–429. [Google Scholar] [CrossRef]
- Ma, L.; Yu, L.; Song, J.; Xuan, W.; Liu, X. Design, Testing and Analysis of a Novel Multiple-Disc Magnetorheological Braking Applied in Vehicles. In Proceedings of the SAE 2015 World Congress & Exhibition, Detroit, MI, USA, 21–23 April 2015. [Google Scholar] [CrossRef]
- Ismail, I.; Mazlan, S.A.; Olabi, A.G. Magnetic Circuit Simulation for Magnetorheological (MR) Fluids Testing Rig in Squeeze Mode. Adv. Mater. Res. 2010, 123–125, 991–994. [Google Scholar] [CrossRef]
- Coon, A.; Yang, T.-H.; Kim, Y.-M.; Kang, H.; Koo, J.-H. Application of Magneto-Rheological Fluids for Investigating the Effect of Skin Properties on Arterial Tonometry Measurements. Front. Mater. 2019, 6, 45. [Google Scholar] [CrossRef]
- Guo, C.-W.; Chen, F.; Meng, Q.-R.; Dong, Z.-X. Yield shear stress model of magnetorheological fluids based on exponential distribution. J. Magn. Magn. Mater. 2014, 360, 174–177. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed]
- Lanzetta, M.; Iagnemma, K. Gripping by controllable wet adhesion using a magnetorheological fluid. CIRP Ann. 2013, 62, 21–25. [Google Scholar] [CrossRef]
- Koivikko, A.; Drotlef, D.-M.; Sitti, M.; Sariola, V. Magnetically switchable soft suction grippers. Extreme Mech. Lett. 2021, 44, 101263. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Chen, X.; Sun, Y.; Gan, M.; Liu, M.; Tang, S.-Y.; Zhang, S.; Li, X.; Li, W.; Sun, L. A Magnetically and Thermally Controlled Liquid Metal Variable Stiffness Material. Adv. Eng. Mater. 2022, 2201296. [Google Scholar] [CrossRef]
- Zhou, X.; Shu, J.; Jin, H.; Ren, H.; Ma, G.; Gong, N.; Ge, D.-A.; Shi, J.; Tang, S.-Y.; Yun, G.; et al. Variable stiffness wires based on magnetorheological liquid metals. Int. J. Smart Nano Mater. 2022, 13, 232–243. [Google Scholar] [CrossRef]
- Cassar, D.J.; Saliba, M.A. A Force Feedback Glove Based on Magnetorheological Fluid: Preliminary Design Issues. In Proceedings of the Melecon 2010–2010 15th IEEE Mediterranean Electrotechnical Conference, Valletta, Malta, 26–28 April 2010; pp. 618–623. [Google Scholar]
- Nguyen, Q.H.; Choi, S.; Lee, Y.S.; Han, M.S. Optimal design of a new 3D haptic gripper for telemanipulation, featuring magnetorheological fluid brakes. Smart Mater. Struct. 2013, 22, 015009. [Google Scholar] [CrossRef]
- Liu, Q.; Jing, T.; Mo, A.; Xu, X.; Zhang, W. A Novel Robot Hand with the Magneto-Rheological Fluid Solidification. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 2495–2500. [Google Scholar]
- Shembekar, S.; Kamezaki, M.; Zhang, P.; He, Z.; Tsunoda, R.; Sakamoto, H.; Sugano, S. Preliminary Development of a Powerful and Backdrivable Robot Gripper Using Magnetorheological Fluid. In Proceedings of the 2020 Proceedings of the 37th ISARC, Kitakyushu, Japan, 27–28 October 2020; pp. 1458–1463. [Google Scholar] [CrossRef]
- Pisetskiy, S.; Kermani, M.R. A Concept of a Miniaturized MR Clutch Utilizing MR Fluid in Squeeze Mode. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 6347–6352. [Google Scholar]
- Fernandez, M.A.; Chang, J.-Y. Design of an Adjustable Fail-Safe MRF Clutch with a Novel Field Blocking Mechanism for Robotic Applications. IEEE Access 2021, 9, 164912–164927. [Google Scholar] [CrossRef]
- Weiss, K.D.; Duclos, G.T.; Chrzan, M.J.; Yanyo, L.C. Magnetorheological Fluid Composite Structures. U.S. Patent US005547049A, 20 August 1996. [Google Scholar]
- Ghaffari, A.; Hashemabadi, S.H.; Ashtiani, M. A review on the simulation and modeling of magnetorheological fluids. J. Intell. Mater. Syst. Struct. 2015, 26, 881–904. [Google Scholar] [CrossRef]
- Białek, M.; Jędryczka, C.; Milecki, A. Investigation of Thermoplastic Polyurethane Finger Cushion with Magnetorheological Fluid for Soft-Rigid Gripper. Energies 2021, 14, 6541. [Google Scholar] [CrossRef]
- Białek, M.; Rybarczyk, D. A Comparative Study of Different Fingertips on the Object Pulling Forces in Robotic Gripper Jaws. Appl. Sci. 2023, 13, 1247. [Google Scholar] [CrossRef]
- LORD Company MRF-140CG documentation. Available online: https://lordfulfillment.com/pdf/44/DS7012_MRF-140CGMRFluid.pdf (accessed on 28 November 2022).
- Jędryczka, C. FE analysis of electromagnetic field coupled with fluid dynamics in an MR clutch. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2007, 26, 1028–1036. [Google Scholar] [CrossRef]
- Pilch, Z.; Domin, J. Conception of the throttle-return valve for the magnetorheological fluid. Arch. Electr. Eng. 2018, 67, 37–49. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Białek, M.; Jędryczka, C. Design and Optimization of a Magnetic Field Exciter for Controlling Magnetorheological Fluid in a Hybrid Soft-Rigid Jaw Gripper. Energies 2023, 16, 2299. https://doi.org/10.3390/en16052299
Białek M, Jędryczka C. Design and Optimization of a Magnetic Field Exciter for Controlling Magnetorheological Fluid in a Hybrid Soft-Rigid Jaw Gripper. Energies. 2023; 16(5):2299. https://doi.org/10.3390/en16052299
Chicago/Turabian StyleBiałek, Marcin, and Cezary Jędryczka. 2023. "Design and Optimization of a Magnetic Field Exciter for Controlling Magnetorheological Fluid in a Hybrid Soft-Rigid Jaw Gripper" Energies 16, no. 5: 2299. https://doi.org/10.3390/en16052299
APA StyleBiałek, M., & Jędryczka, C. (2023). Design and Optimization of a Magnetic Field Exciter for Controlling Magnetorheological Fluid in a Hybrid Soft-Rigid Jaw Gripper. Energies, 16(5), 2299. https://doi.org/10.3390/en16052299