

Traveling Wave-Based Fault Localization in FACTS-Compensated Transmission Line via Signal Decomposition Techniques



Abstract
:1. Introduction
- The performance of ITD and EMD-based FLMs was improved by applying Teager energy operator to calculate the energy of principle rotation component 1 (PRC1) and intrinsic mode function 1 (IMF1), respectively.
- Originally, ITD, ST, and EMD-based FLMs were proposed for locating faults in UPFC-compensated systems, whereas ESPRIT-based FLM was proposed for fault locations in series and TCSC-compensated systems with wind farms. However, in this work, the performance of all FLMs was compared for fault localization in all types of FACTS-compensated systems, i.e., series, shunt, and series-shunt-compensated systems.
- The performance of all FLMs was investigated for UPFC-compensated practical two-area four-machine 11-bus Kundur test systems.
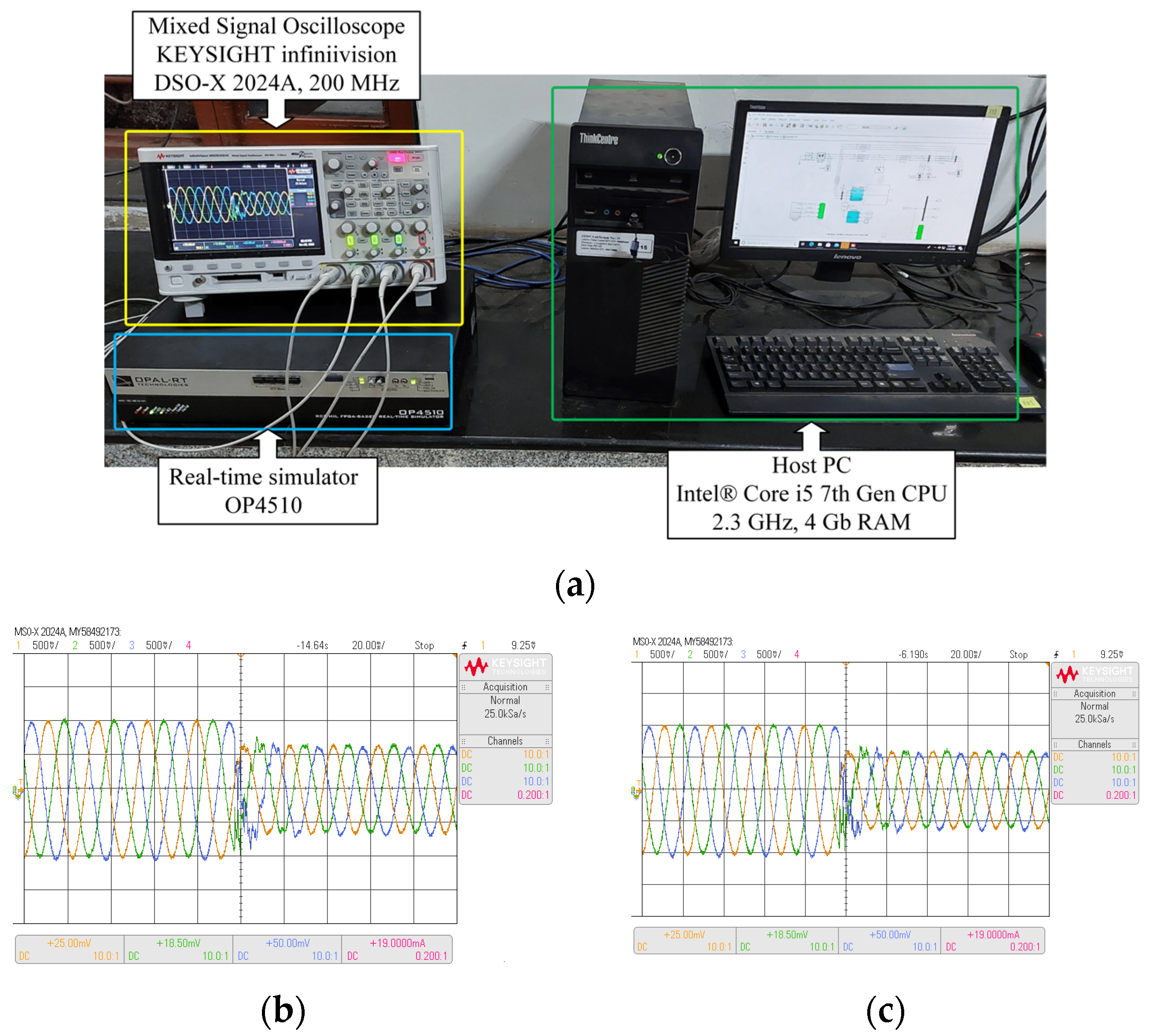
- The real-time validation of EMD-based FLM with Opal-RT is presented.
2. Overview of Signal Decomposition Techniques
2.1. Intrinsic Time Decomposition (ITD)
2.2. Empirical Mode Decomposition (EMD)
2.3. S-Transform (ST)
2.4. Estimation of Signal Parameters via Rotational Invariance Technique (ESPRIT)
2.5. Teager Energy of a Signal
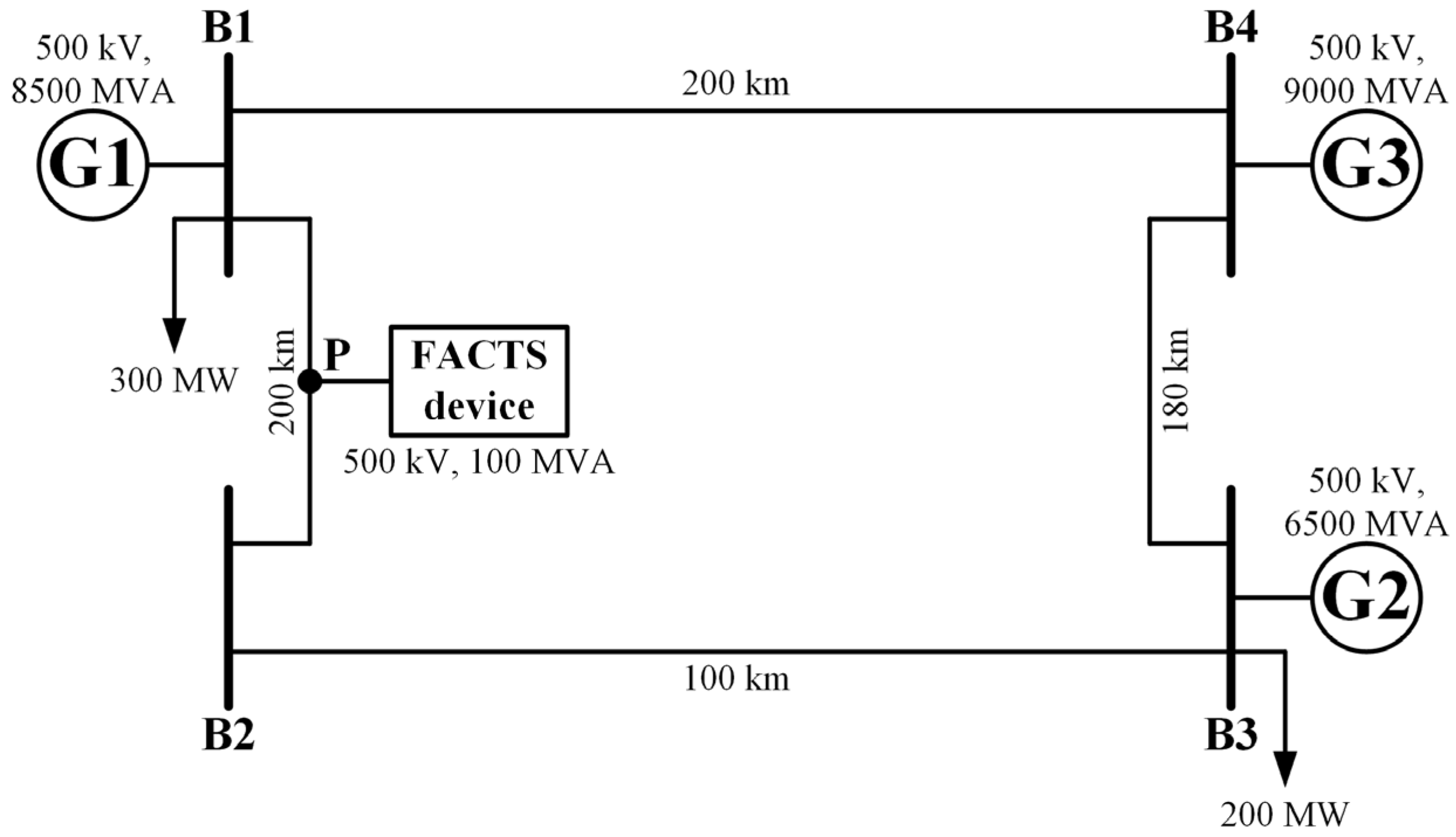
3. System under Study
4. Development of Fault Location Methods
- Consider a transmission line B1–B2, as shown in Figure 1, on which a double line to ground fault occurs at 111.30 km from bus B1. Fault inception time is 0.3 s. From the traveling wave theory, the waves originate from the point of fault and travel towards terminal B1 and B2 and will get terminated. The instantaneous voltage signals measured at terminal B1 and B2 are recorded.
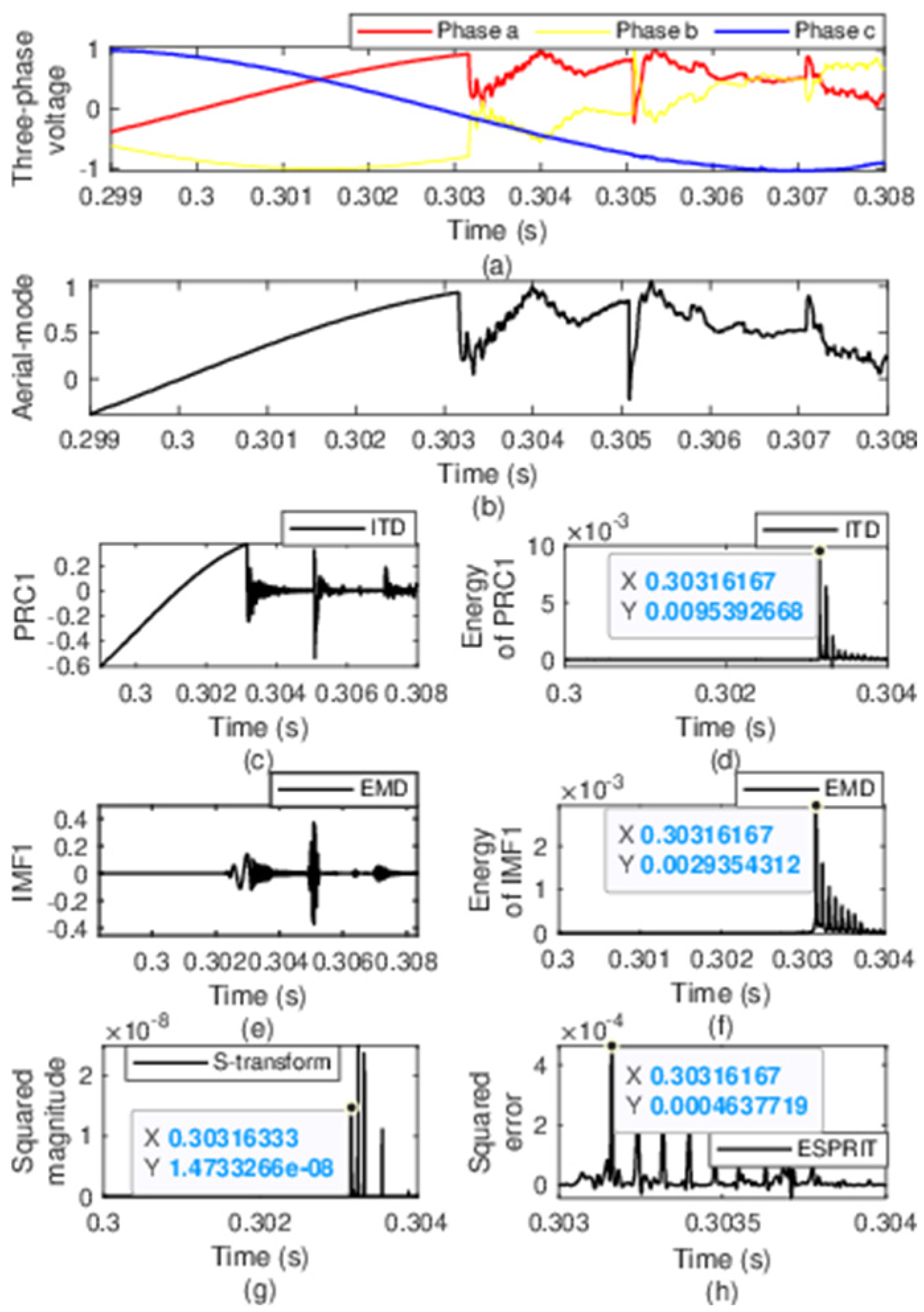
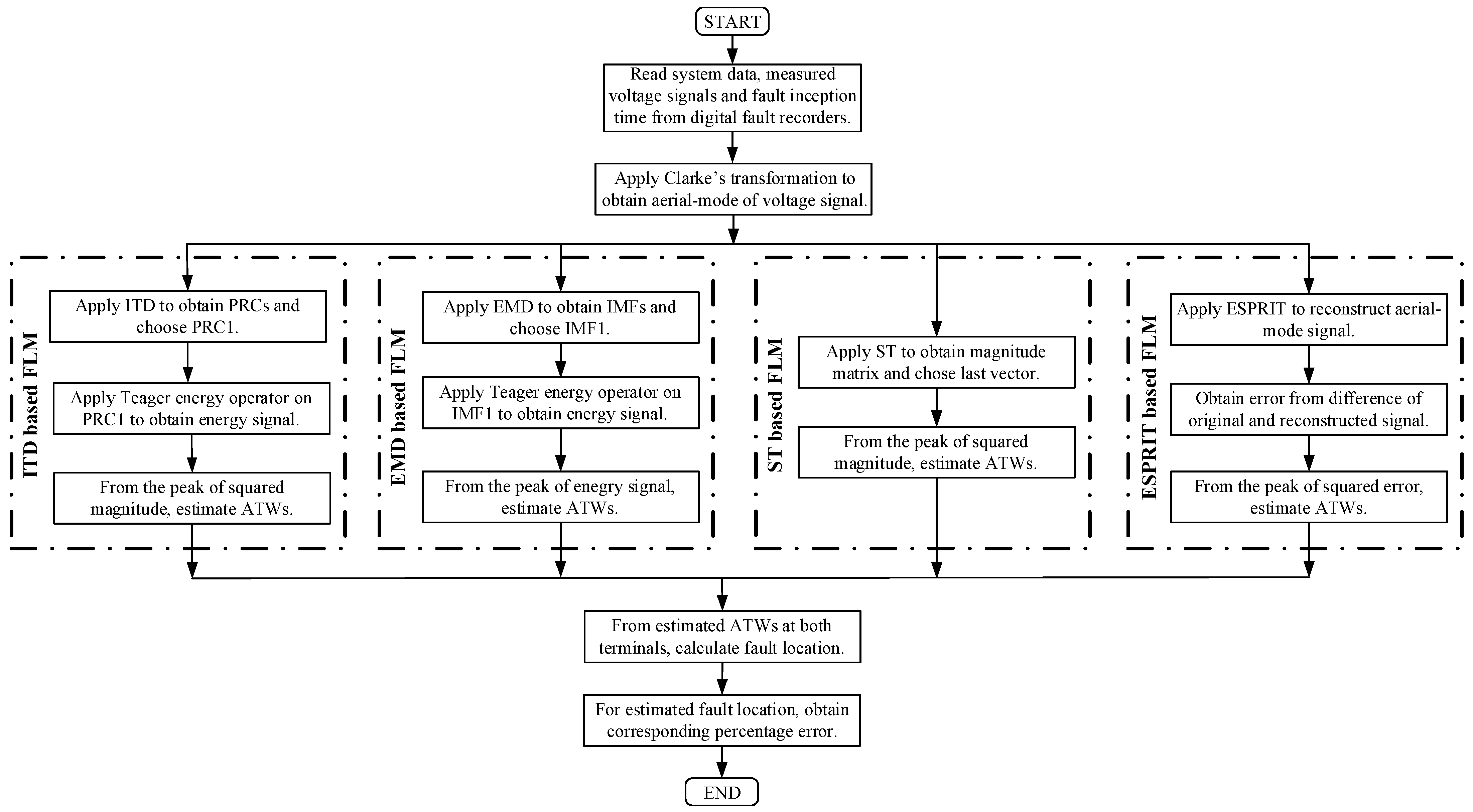
- The voltage signals are decoupled using Clarke’s transformation and modal signals are obtained.
- Aerial-mode of the signals are selected and decomposed using any signal processing techniques.
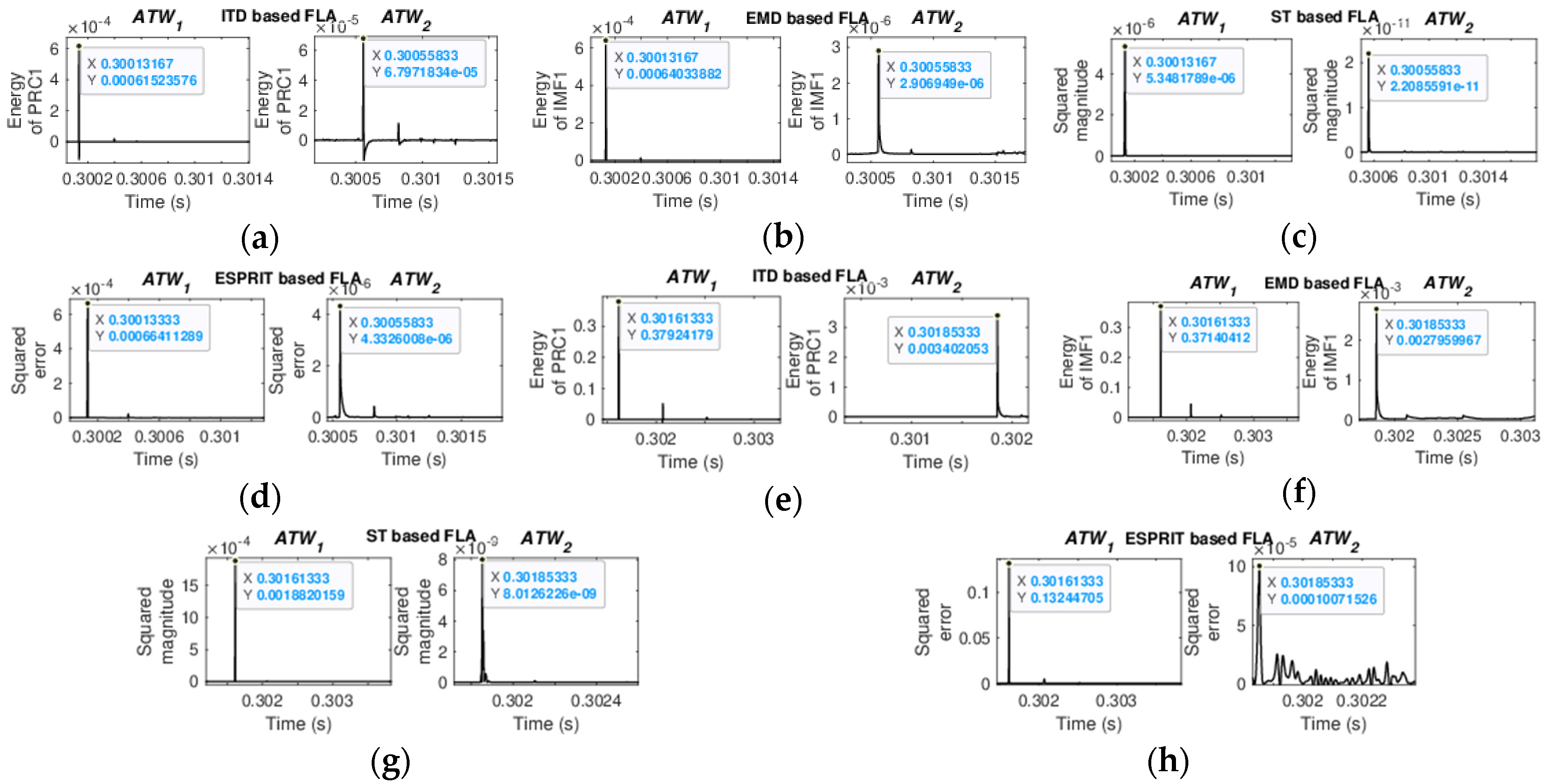
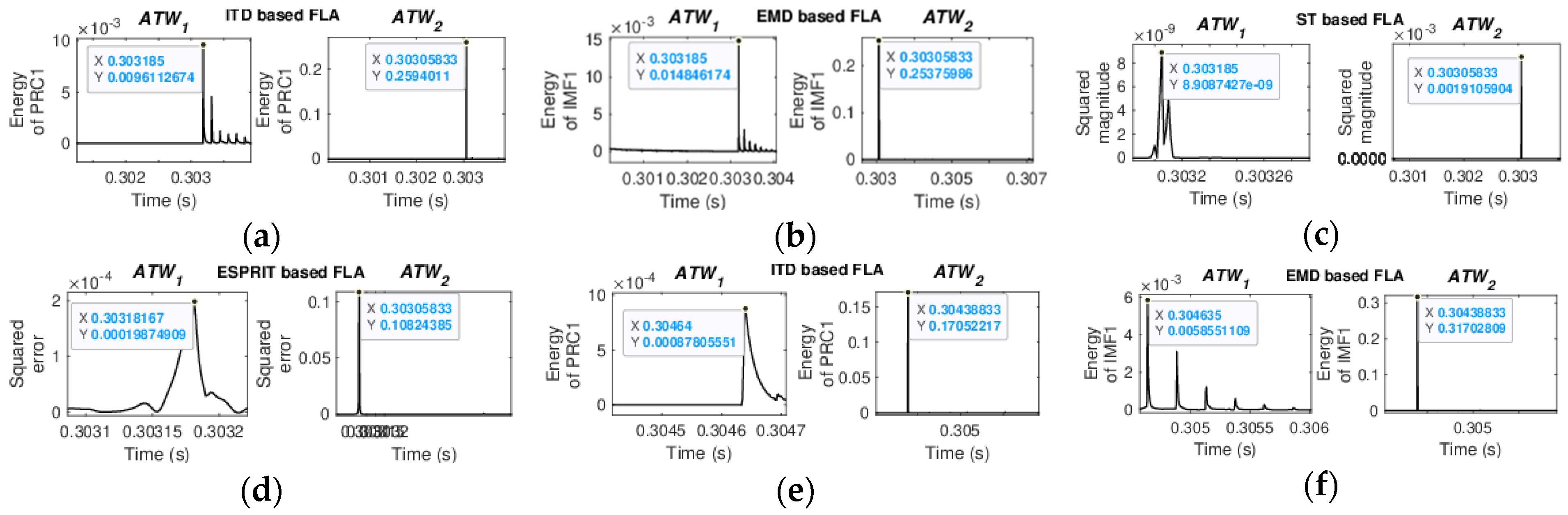
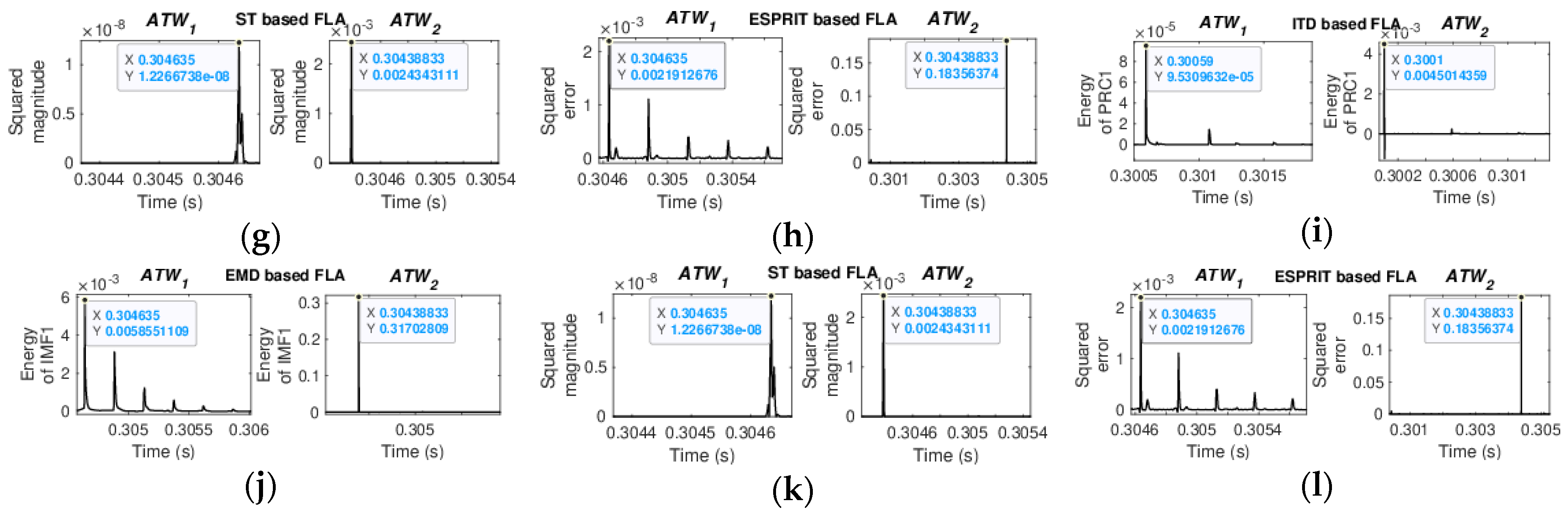
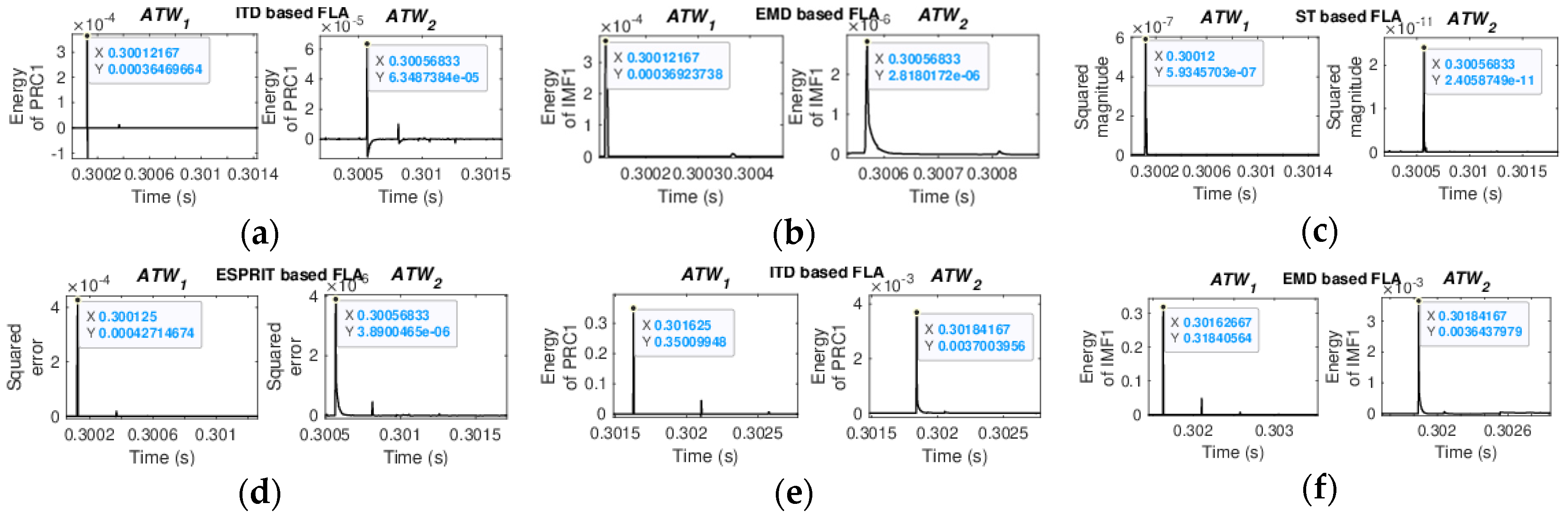
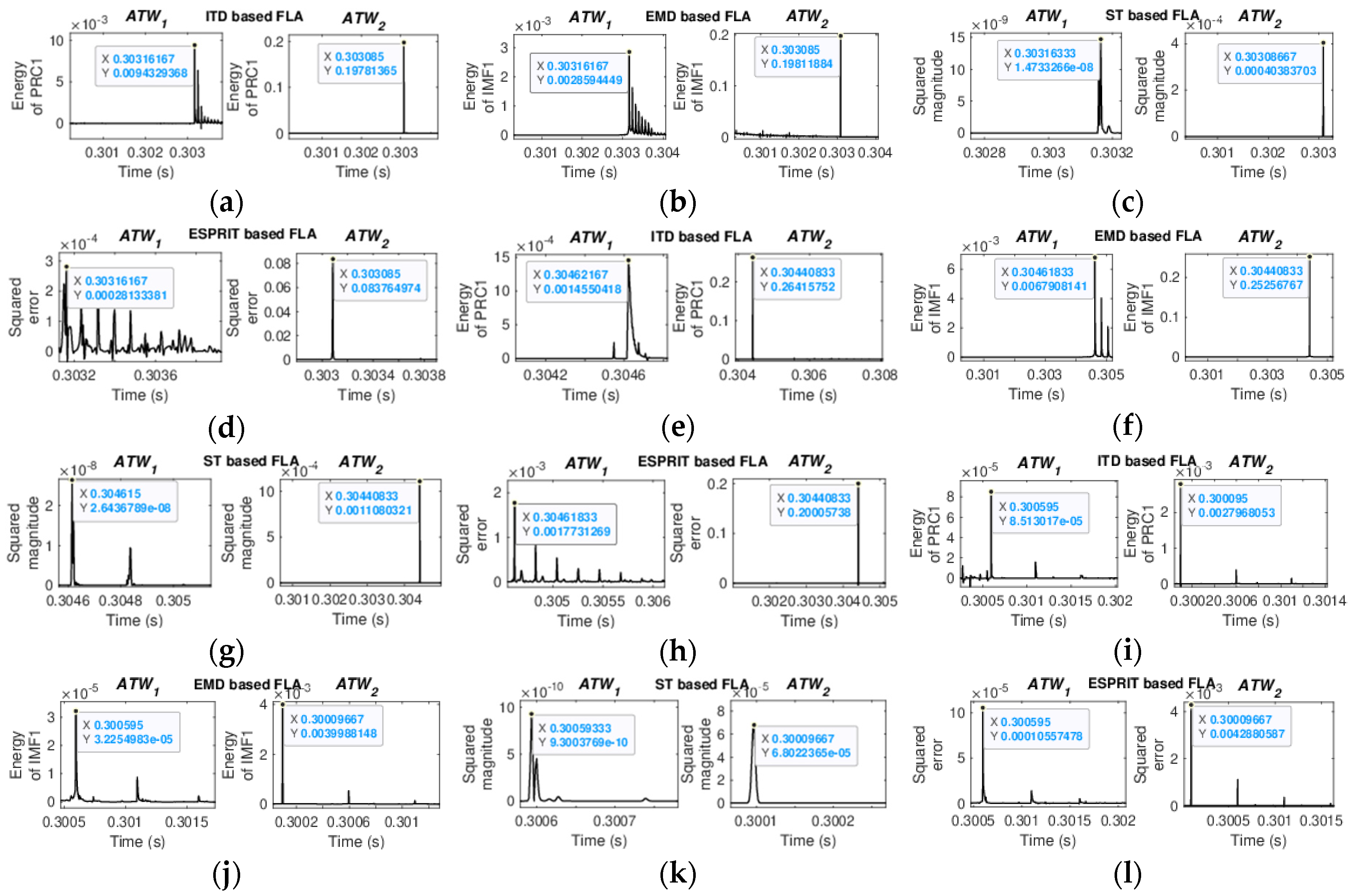
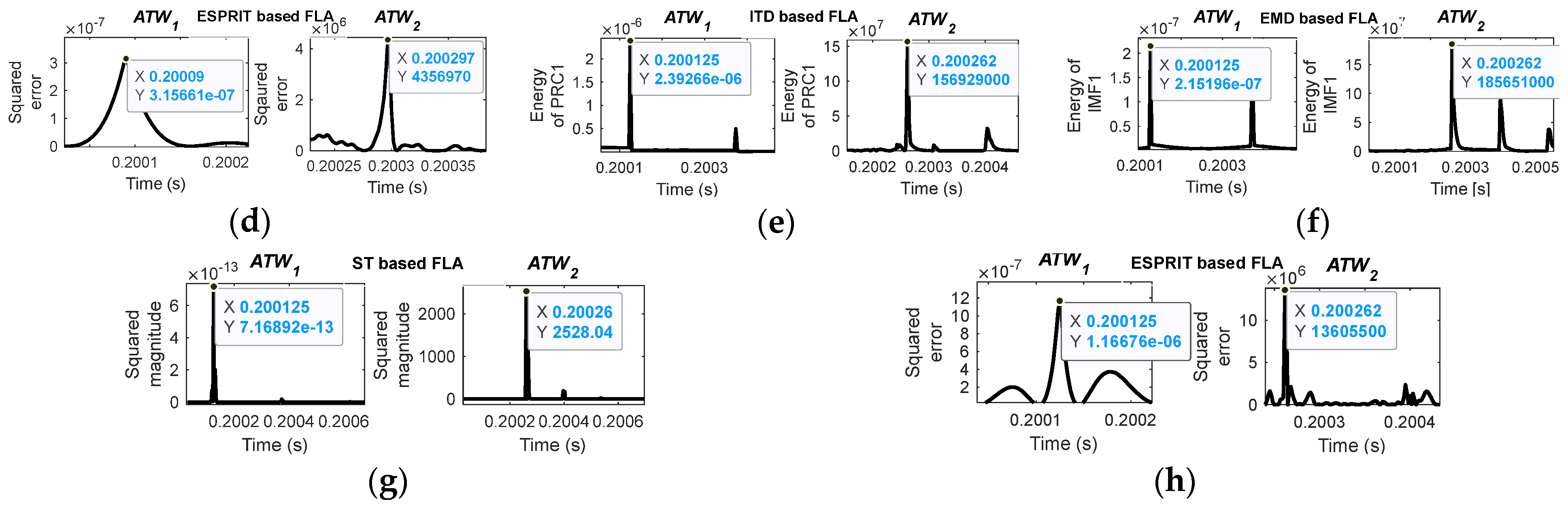
- From the decomposed signals, ATWs are detected and estimated. For ITD and EMD-based FLMs, Teager energy is calculated from decomposed signals, and the instant peak of energy signals is considered as ATW. For ST-based FLM, the instant of peak of squared magnitude was utilized to estimate ATW, whereas for ESPRIT-based FLM, the instant peak of squared error was used to estimate ATW. The estimated ATWs at the bus B1 and B2 are and , respectively.
- The distance of fault point from bus B1 is calculated by the expression given as follows.where is the total length of the transmission line in km and is the wave speed in km/s.
- The percentage error for obtained is calculated in the following manner.where is the actual location of fault in km.
4.1. ITD-Based FLM
4.2. EMD-Based FLM
4.3. ST-Based FLM
4.4. ESPRIT-Based FLM
5. Numerical and Simulation Results
5.1. Performance under Series Compensation
5.2. Performance under Shunt Compensation
5.3. Performance under Series-Shunt Compensation
5.4. Performance under UPFC Compensation in Two-Area Four-Machine Kundur 11-Bus Test System
5.5. Critical Discussion
- The modifications proposed in this work for ITD and EMD-based FLMs improve their respective performance regarding fault locations in FACTS-compensated systems.
- EMD performs better on most occasions.
- ST-based FLM is found to estimate the location with some error of around 1%.
- ESPRIT-based FLM involves complex methodology in estimating ATWs compared to other three, since reconstruction of signals is required with the help of matrix computations.
- For large practical power systems, EMD and ITD-based FLMs perform better, whereas ST and ESPRIT-based FLMs failed to perform accurately for one test scenario.
- EMD-based FLM performs efficiently with real-time signals.
5.6. Real-Time Validation of Proposed FLM
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mishra, S.; Gupta, S.; Yadav, A. Intrinsic time decomposition based fault location scheme for unified power flow controller compensated transmission line. Int. Trans. Electr. Energy Syst. 2020, 30, e12585. [Google Scholar] [CrossRef]
- Mishra, S.; Gupta, S.; Yadav, A. A novel two-terminal fault location approach utilizing traveling-waves for series compensated line connected to wind farms. Electr. Power Syst. Res. 2021, 198, 107362. [Google Scholar] [CrossRef]
- Fan, X.-Q.; Zhu, Y.-L.; Lu, W.-F. Traveling wave based fault location for transmission lines based on EMD-TEO. Power Syst. Prot. Control 2012, 40, 8–12+17. [Google Scholar]
- Mishra, S.; Gupta, S.; Yadav, A. Empirical mode decomposition assisted fault localization for UPFC compensated system. In Proceedings of the 2020 21st National Power Systems Conference (NPSC), Gandhinagar, India, 17–19 December 2020; pp. 1–6. [Google Scholar]
- Abdelaziz, A.; Ibrahim, A.; Mansour, M.; Talaat, H. Modern approaches for protection of series compensated transmission lines. Electr. Power Syst. Res. 2005, 75, 85–98. [Google Scholar] [CrossRef]
- Abdelaziz, A.; Mekhamer, S.; Ezzat, M. Fault location of uncompensated/series-compensated lines using two-end synchronized measurements. Electr. Power Compon. Syst. 2013, 41, 693–715. [Google Scholar] [CrossRef]
- Sahoo, B.; Samantaray, S.R. An enhanced fault detection and location estimation method for TCSC compensated line connecting wind farm. Int. J. Electr. Power Energy Syst. 2018, 96, 432–441. [Google Scholar] [CrossRef]
- Swetapadma, A.; Yadav, A.; Abdelaziz, A.Y. Intelligent schemes for fault classification in mutually coupled series-compensated parallel transmission lines. Neural Comput. Appl. 2020, 32, 6939–6956. [Google Scholar] [CrossRef]
- Swetapadma, A.; Mishra, P.; Yadav, A.; Abdelaziz, A.Y. A non-unit protection scheme for double circuit series capacitor compensated transmission lines. Electr. Power Syst. Res. 2017, 148, 311–325. [Google Scholar] [CrossRef]
- Reyes-Archundia, E.; Moreno-Goytia, E.; Guardado, J. An algorithm based on traveling waves for transmission line protection in a TCSC environment. Int. J. Electr. Power Energy Syst. 2014, 60, 367–377. [Google Scholar] [CrossRef]
- Reyes-Archundia, E.; Gutiérrez-Gnecchi, J.A.; Guerrero-Rodríguez, N.F.; del Carmen Téllez-Anguiano, A.; Méndez-Patiño, A.; Salazar-Torres, J.A. Impact of TCSC on Directionality of Traveling Waves to Locate Faults in Transmission Lines. IEEE Lat. Am. Trans. 2021, 19, 147–154. [Google Scholar] [CrossRef]
- Sahani, M.; Dash, P. Fault location estimation for series-compensated double-circuit transmission line using EWT and weighted RVFLN. Eng. Appl. Artif. Intell. 2020, 88, 103336. [Google Scholar] [CrossRef]
- Sahani, M.; Dash, P. Fault location estimation for series-compensated double-circuit transmission line using parameter optimized variational mode decomposition and weighted P-norm random vector functional link network. Appl. Soft Comput. 2019, 85, 105860. [Google Scholar] [CrossRef]
- Biswas, S.; Nayak, P.K.; Pradhan, G. A dual-time transform assisted intelligent relaying scheme for the STATCOM-compensated transmission line connecting wind farm. IEEE Syst. J. 2021, 16, 2160–2171. [Google Scholar] [CrossRef]
- Ghazizadeh-Ahsaee, M.; Sadeh, J. Accurate fault location algorithm for transmission lines in the presence of shunt-connected flexible AC transmission system devices. IET Gener. Transm. Distrib. 2012, 6, 247–255. [Google Scholar] [CrossRef]
- Khoramabadi, H.R.; Keshavarz, A.; Dashti, R. A novel fault location method for compensated transmission line including UPFC using one-ended voltage and FDOST transform. Int. Trans. Electr. Energy Syst. 2020, 30, e12357. [Google Scholar] [CrossRef]
- Khalili, M.; Namdari, F.; Rokrok, E. A fault location and detection technique for STATCOM compensated transmission lines using game theory. IET Gener. Transm. Distrib. 2021, 15, 1688–1701. [Google Scholar] [CrossRef]
- Khalili, M.; Namdari, F.; Rokrok, E. Traveling wave-based protection for TCSC connected transmission lines using game theory. Int. Trans. Electr. Energy Syst. 2020, 30, e12545. [Google Scholar] [CrossRef]
- Mousaviyan, I.; Seifossadat, S.G.; Saniei, M. Traveling Wave-based Algorithm for Fault Detection, Classification, and Location in STATCOM-Compensated Parallel Transmission Lines. Electr. Power Syst. Res. 2022, 210, 108118. [Google Scholar] [CrossRef]
- Mirzaei, M.; Vahidi, B.; Hosseinian, S.H. Fault location on a series-compensated three-terminal transmission line using deep neural networks. IET Sci. Meas. Technol. 2018, 12, 746–754. [Google Scholar] [CrossRef]
- Tabari, M.; Sadeh, J. Fault location in series-compensated transmission lines using adaptive network-based fuzzy inference system. Electr. Power Syst. Res. 2022, 208, 107800. [Google Scholar] [CrossRef]
- Wu, J.; Shi, H.; Jiang, X.; Su, C.; Li, P. Stochastic fuzzy predictive fault-tolerant control for time-delay nonlinear system with actuator fault under a certain probability. Optim. Control Appl. Methods 2022, 1–30. [Google Scholar] [CrossRef]
- Deng, F.; Zeng, X.; Tang, X.; Li, Z.; Zu, Y.; Mei, L. Travelling-wave-based fault location algorithm for hybrid transmission lines using three-dimensional absolute grey incidence degree. Int. J. Electr. Power Energy Syst. 2020, 114, 105306. [Google Scholar] [CrossRef]
- Deng, Y.; Wang, C.; Zhang, S.; Han, W. A fault location algorithm for shunt-compensated lines under dynamic conditions. Int. J. Electr. Power Energy Syst. 2022, 143, 108387. [Google Scholar] [CrossRef]
- Panahi, H.; Zamani, R.; Sanaye-Pasand, M.; Mehrjerdi, H. Advances in Transmission Network Fault Location in Modern Power Systems: Review, Outlook and Future Works. IEEE Access 2021, 9, 158599–158615. [Google Scholar] [CrossRef]
- Frei, M.G.; Osorio, I. Intrinsic time-scale decomposition: Time–frequency–energy analysis and real-time filtering of non-stationary signals. Proc. R. Soc. A: Math. Phys. Eng. Sci. 2007, 463, 321–342. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Ottersten, B.; Kailath, T. Direction-of-arrival estimation for wide-band signals using the ESPRIT algorithm. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 317–327. [Google Scholar] [CrossRef]
- Kaiser, J.F. On a simple algorithm to calculate the ‘energy’ of a signal. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Albuquerque, NM, USA, 3–6 April 1990; pp. 381–384. [Google Scholar]
- Chaitanya, B.; Yadav, A. Decision tree aided travelling wave based fault section identification and location scheme for multi-terminal transmission lines. Measurement 2019, 135, 312–322. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Different Fault Conditions | ITD-Based FLM | EMD-Based FLM | ST-Based FLM | ESPRIT-Based FLM | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault Type | AFL (km) | FR | FIA (deg.) | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | ||
| Before SSSC | 1. | AG | 38.30 | 0.01 | 0 | 38.1471 | 0.0765 | 38.1471 | 0.0765 | 38.1471 | 0.0765 | 38.3877 | 0.0439 |
| 2. | AB | 65.40 | 0.1 | 30 | 65.2072 | 0.0964 | 65.2072 | 0.0964 | 65.2072 | 0.0964 | 65.2072 | 0.0964 | |
| After SSSC | 3. | ABG | 118.20 | 1 | 60 | 118.3633 | 0.0817 | 118.3633 | 0.0817 | 118.3633 | 0.0817 | 117.8806 | 0.1597 |
| 4. | ABC | 135.60 | 10 | 90 | 136.4846 | 0.4423 | 135.7597 | 0.0799 | 135.7597 | 0.0799 | 135.7597 | 0.0799 | |
| 5. | ABCG | 170.80 | 100 | 0 | 171.0353 | 0.1177 | 171.0353 | 0.1177 | 171.0353 | 0.1177 | 171.0353 | 0.1177 | |
| Scenario | Different Fault Conditions | ITD-Based FLM | EMD-Based FLM | ST-Based FLM | ESPRIT-Based FLM | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault Type | AFL (km) | FR | FIA (deg.) | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | ||
| Before STATCOM | 1. | AG | 35.50 | 0.01 | 0 | 35.2477 | 0.1262 | 35.2477 | 0.1262 | 35.0056 | 0.2472 | 35.7304 | 0.1152 |
| 2. | AB | 68.80 | 0.1 | 30 | 68.5894 | 0.1053 | 68.8314 | 0.0157 | 68.5894 | 0.1053 | 68.5894 | 0.1053 | |
| After STATCOM | 3. | ABG | 115.90 | 1 | 60 | 115.9467 | 0.0233 | 115.9467 | 0.0233 | 116.1874 | 0.1437 | 115.9467 | 0.0233 |
| 4. | ABC | 132.10 | 10 | 90 | 133.3431 | 0.6216 | 131.8934 | 0.1033 | 131.8934 | 0.1033 | 132.3762 | 0.1381 | |
| 5. | ABCG | 168.50 | 100 | 0 | 168.6201 | 0.0600 | 168.6201 | 0.0600 | 168.6201 | 0.0600 | 168.6201 | 0.0600 | |
| Scenario | Different Fault Conditions | ITD-Based FLM | EMD-Based FLM | ST-Based FLM | ESPRIT-Based FLM | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault Type | AFL (km) | FR | FIA (deg.) | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | ||
| Before UPFC | 1. | AG | 40.20 | 0.01 | 0 | 40.0781 | 0.6090 | 40.0781 | 0.609 | 40.0781 | 0.6090 | 40.3202 | 0.0601 |
| 2. | AB | 70.40 | 0.1 | 30 | 70.5218 | 0.0609 | 70.5218 | 0.0609 | 71.0060 | 0.3030 | 70.7639 | 0.1820 | |
| After UPFC | 3. | ABG | 111.30 | 1 | 60 | 111.1148 | 0.0926 | 111.1148 | 0.0926 | 110.8235 | 0.2383 | 111.1148 | 0.0926 |
| 4. | ABC | 130.60 | 10 | 90 | 130.9279 | 0.1639 | 130.9515 | 0.1758 | 129.9609 | 0.3195 | 130.4437 | 0.0782 | |
| 5. | ABCG | 172.50 | 100 | 0 | 172.4850 | 0.0075 | 172.2429 | 0.1285 | 172.0008 | 0.2496 | 172.2429 | 0.1285 | |
| Scenario | Different Fault Conditions | ITD-Based FLM | EMD-Based FLM | ST-Based FLM | ESPRIT-Based FLM | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault Type | AFL (km) | FR | FIA (deg.) | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | EFL (km) | %Error | ||
| Before UPFC | 1. | AG | 25.30 | 0.01 | 0 | 25.3140 | 0.0127 | 25.3140 | 0.0127 | 25.5515 | 0.2286 | 25.5040 | 0.1855 |
| 2. | AB | 35.40 | 0.1 | 30 | 35.5260 | 0.1145 | 35.5260 | 0.1145 | 35.7635 | 0.3304 | 35.5260 | 0.1145 | |
| After UPFC | 3. | ABG | 75.60 | 1 | 60 | 76.1364 | 0.4876 | 76.1364 | 0.4876 | 75.8989 | 0.2717 | 76.6588 | 0.9626 |
| 4. | ABC | 65.70 | 10 | 90 | 66.6843 | 0.8949 | 66.1619 | 0.4199 | 65.9719 | 0.2472 | 65.9719 | 0.2472 | |
| 5. | ABCG | 85.90 | 100 | 0 | 86.3484 | 0.4985 | 86.3484 | 0.4985 | 77.7988 | 7.2738 | 69.6767 | 14.6575 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mishra, S.; Gupta, S.; Yadav, A.; Abdelaziz, A.Y. Traveling Wave-Based Fault Localization in FACTS-Compensated Transmission Line via Signal Decomposition Techniques. Energies 2023, 16, 1871. https://doi.org/10.3390/en16041871
Mishra S, Gupta S, Yadav A, Abdelaziz AY. Traveling Wave-Based Fault Localization in FACTS-Compensated Transmission Line via Signal Decomposition Techniques. Energies. 2023; 16(4):1871. https://doi.org/10.3390/en16041871
Chicago/Turabian StyleMishra, Saswati, Shubhrata Gupta, Anamika Yadav, and Almoataz Y. Abdelaziz. 2023. "Traveling Wave-Based Fault Localization in FACTS-Compensated Transmission Line via Signal Decomposition Techniques" Energies 16, no. 4: 1871. https://doi.org/10.3390/en16041871
APA StyleMishra, S., Gupta, S., Yadav, A., & Abdelaziz, A. Y. (2023). Traveling Wave-Based Fault Localization in FACTS-Compensated Transmission Line via Signal Decomposition Techniques. Energies, 16(4), 1871. https://doi.org/10.3390/en16041871