
Numerical Study on Thermodynamic Coupling Characteristics of Fluid Sloshing in a Liquid Hydrogen Tank for Heavy-Duty Trucks




Abstract
:1. Introduction
2. Establishment of Fluid–Solid Coupling Numerical Model
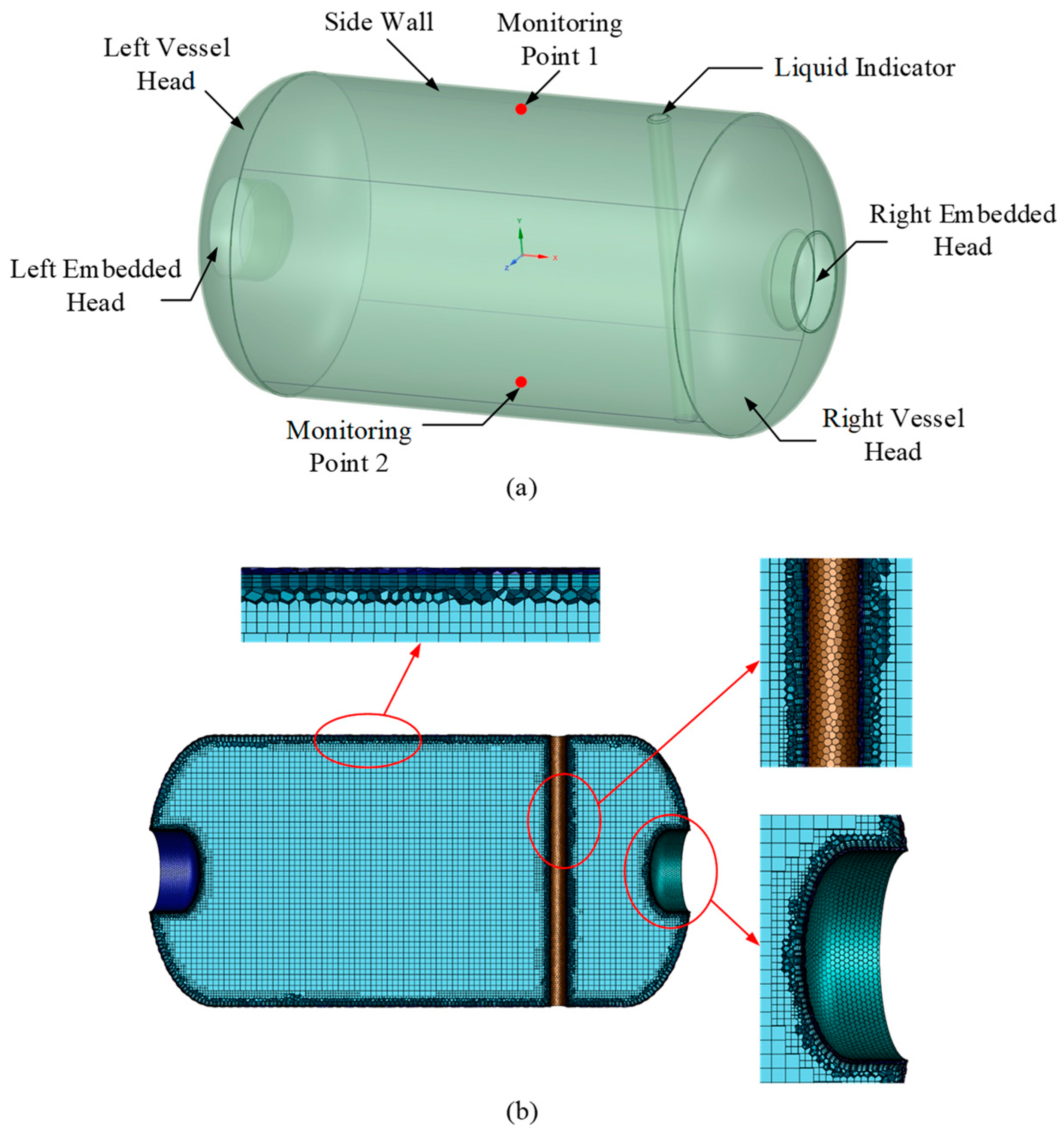
2.1. Geometric Object Description
2.2. Governing Equations
2.3. Turbulence Model
2.4. Multiphase Model
2.5. Phase Change Model
2.6. Boundary Conditions and Initial Conditions
2.7. Solution Strategy
3. Mesh Independence Analysis and Model Validation
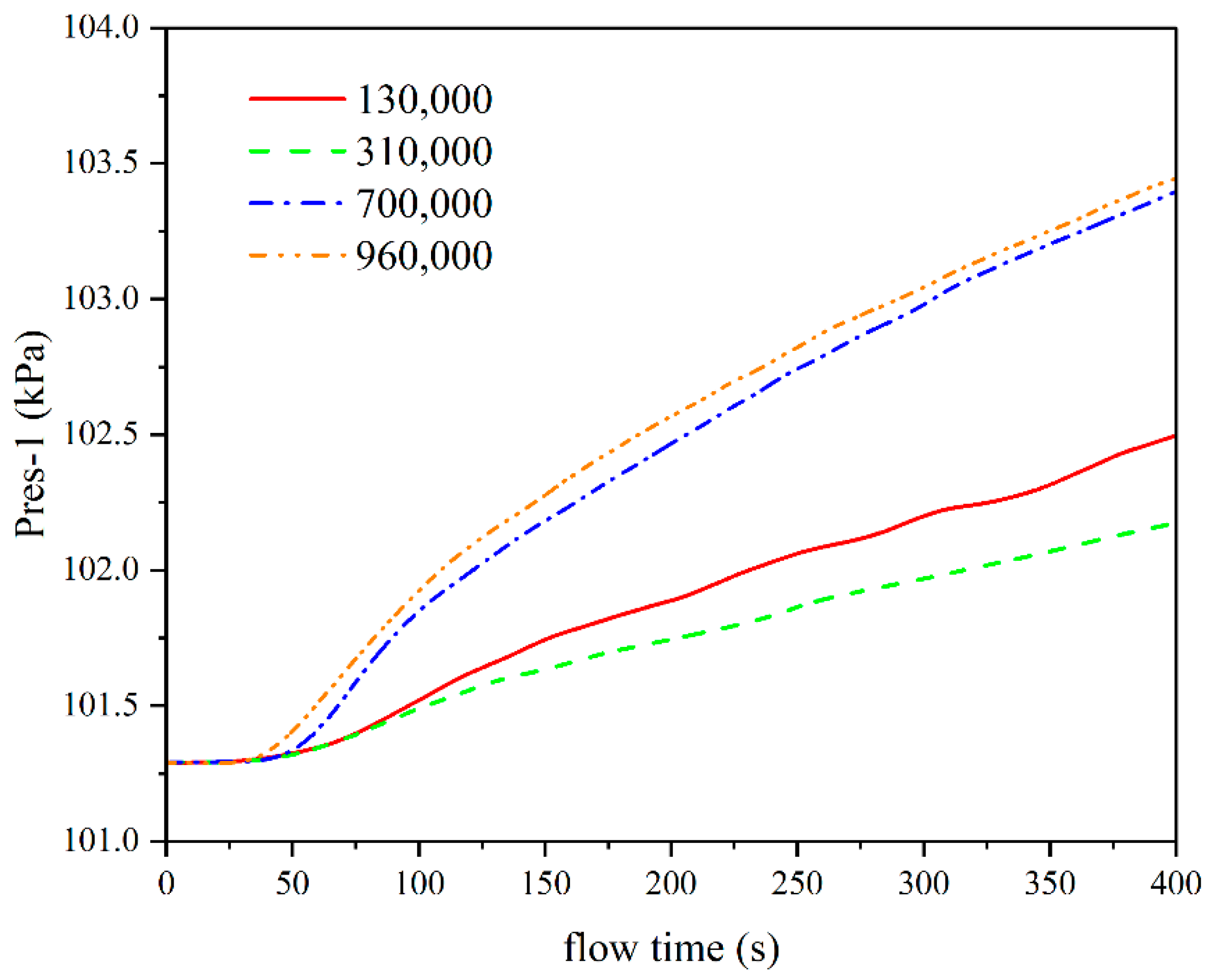
3.1. Mesh Independence Analysis
3.2. Independence Analysis of Phase Change Coefficient
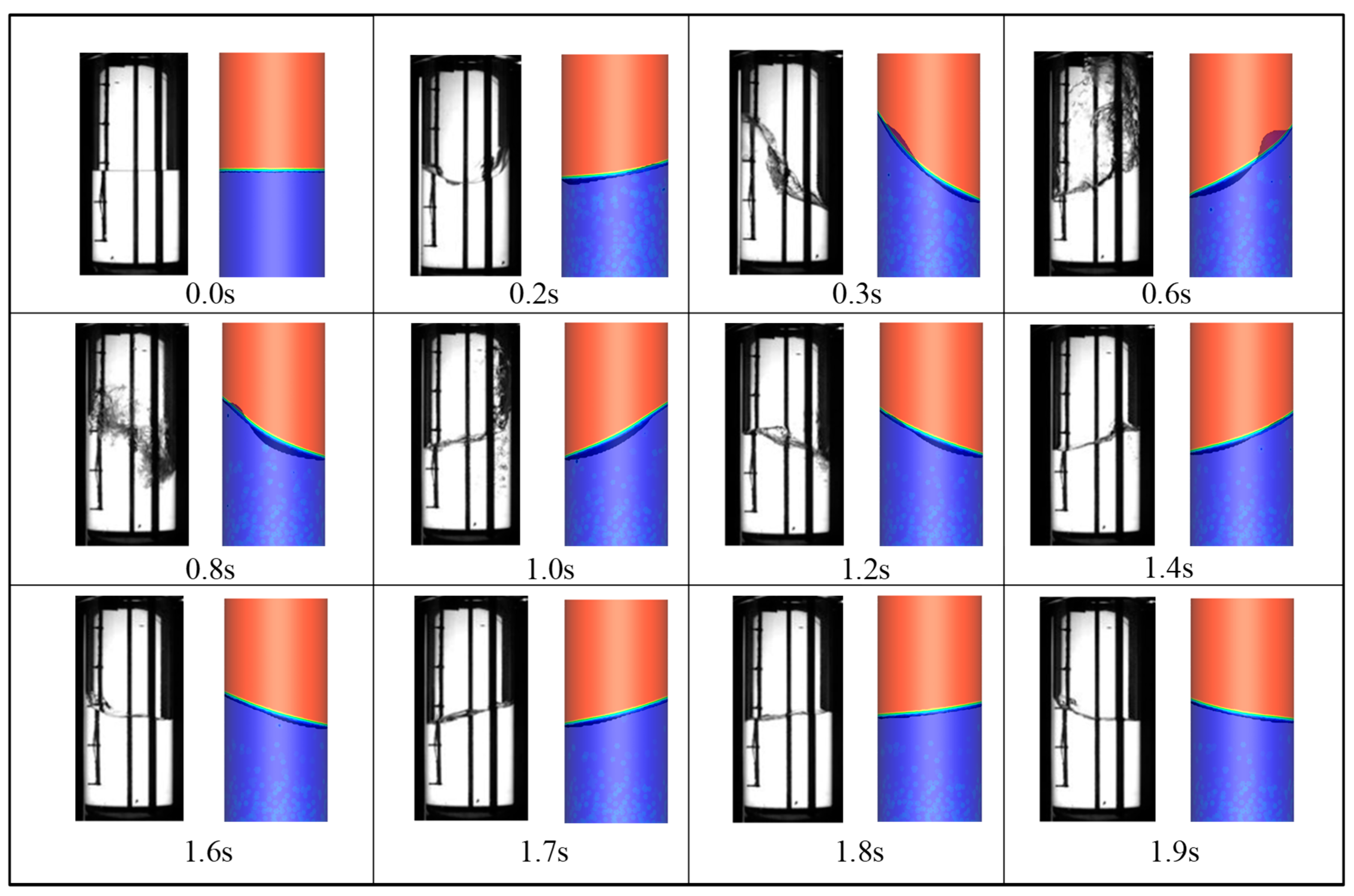
3.3. Model Validation
4. Results and Discussion
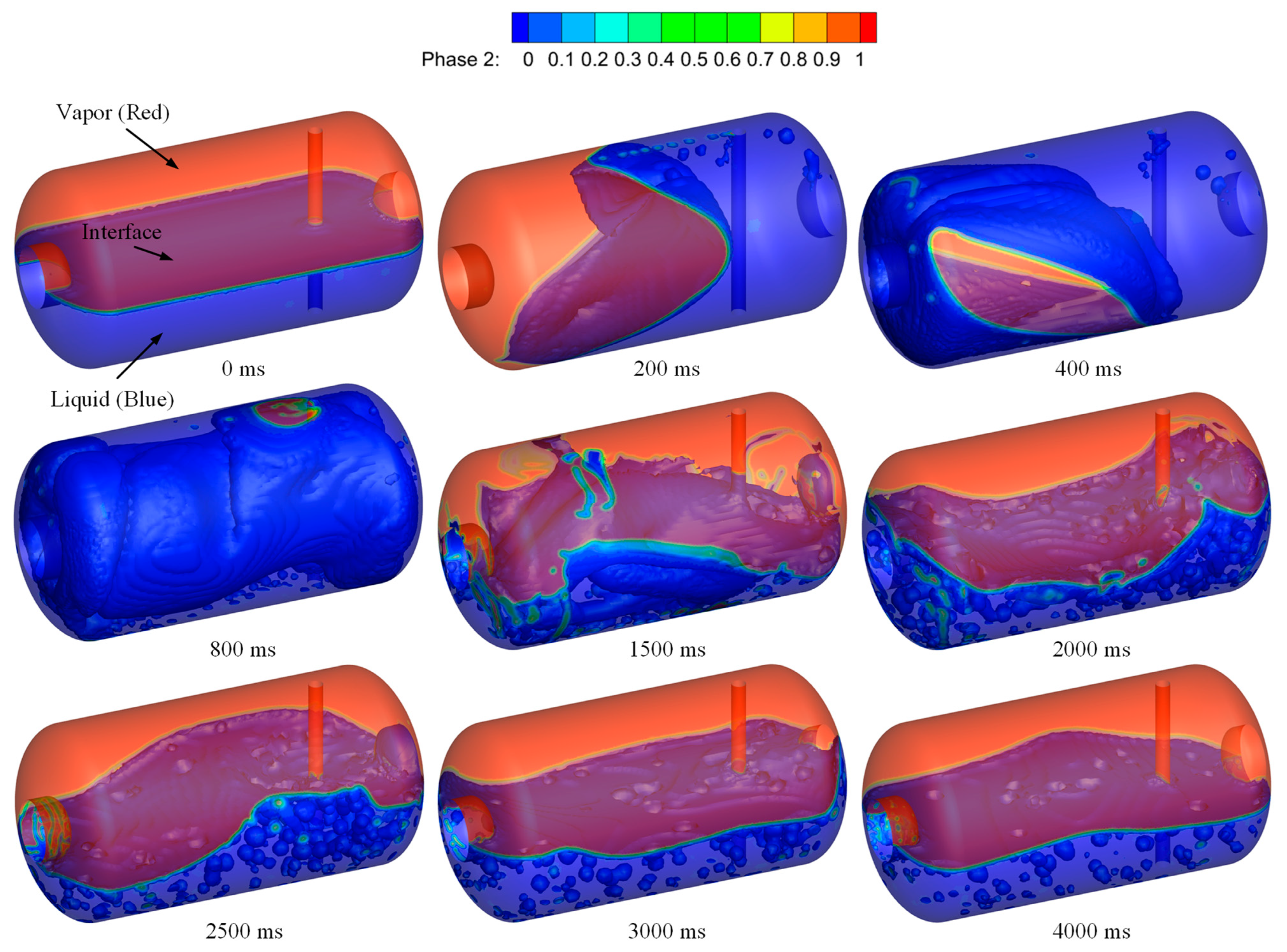
4.1. Thermodynamic Coupling Characteristics of Large-Amplitude Sloshing
4.2. Influence of Acceleration Magnitude on the Fluid Sloshing
4.3. Influence of Duration of Acceleration on Fluid Sloshing
5. Conclusions
- (1)
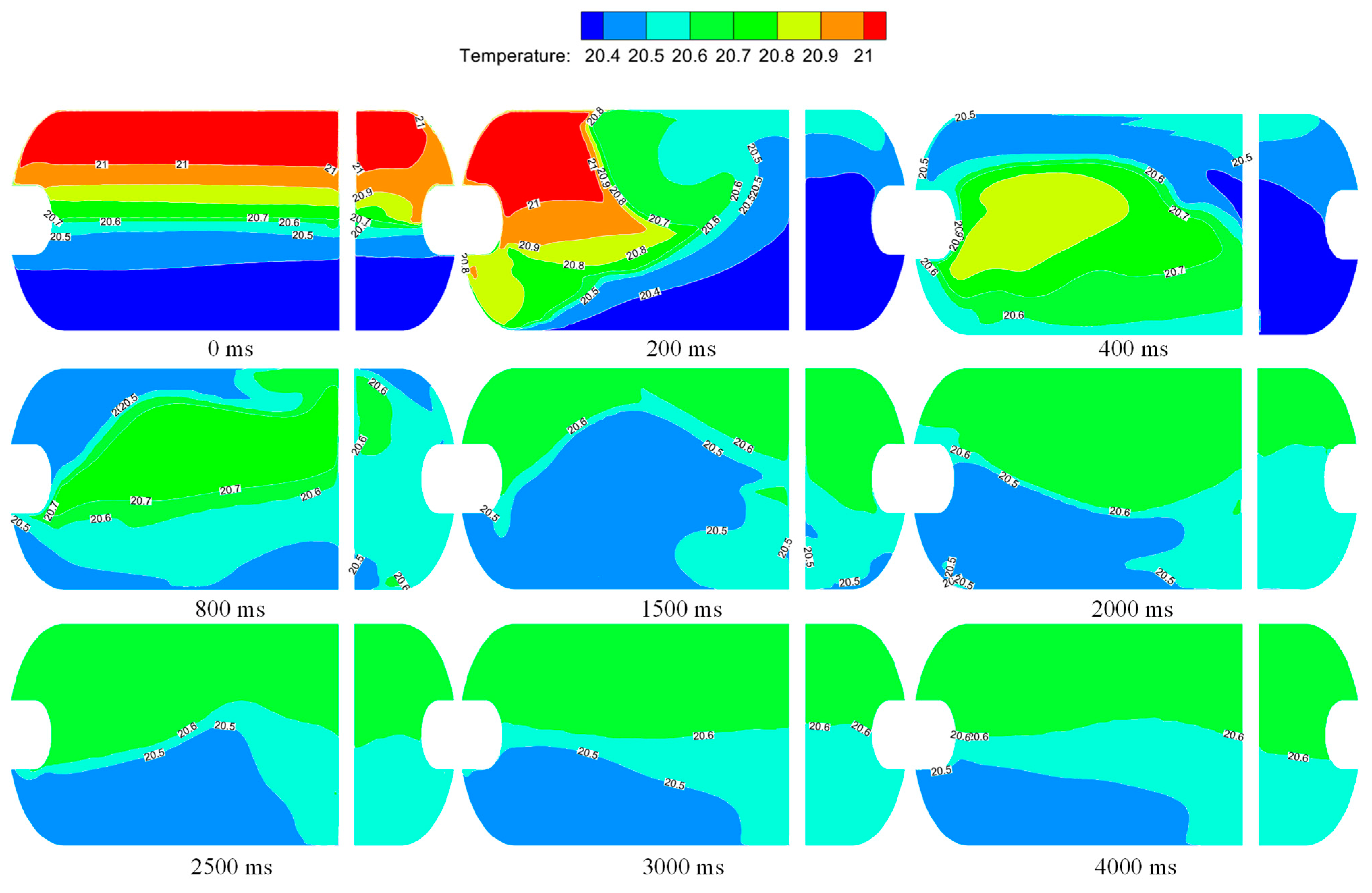
- The large-amplitude sloshing of liquid hydrogen within the tank destroys the temperature stratification, resulting in a significant decrease in vapor temperature and an obvious increase in liquid temperature. Moreover, a large amount of hydrogen vapor is condensed, causing a rapid decline in ullage pressure within the tank. Even so, the liquid temperature prominently increases under the effect of heat exchange, tremendously accelerating the process of liquid hydrogen reaching a saturation state.
- (2)
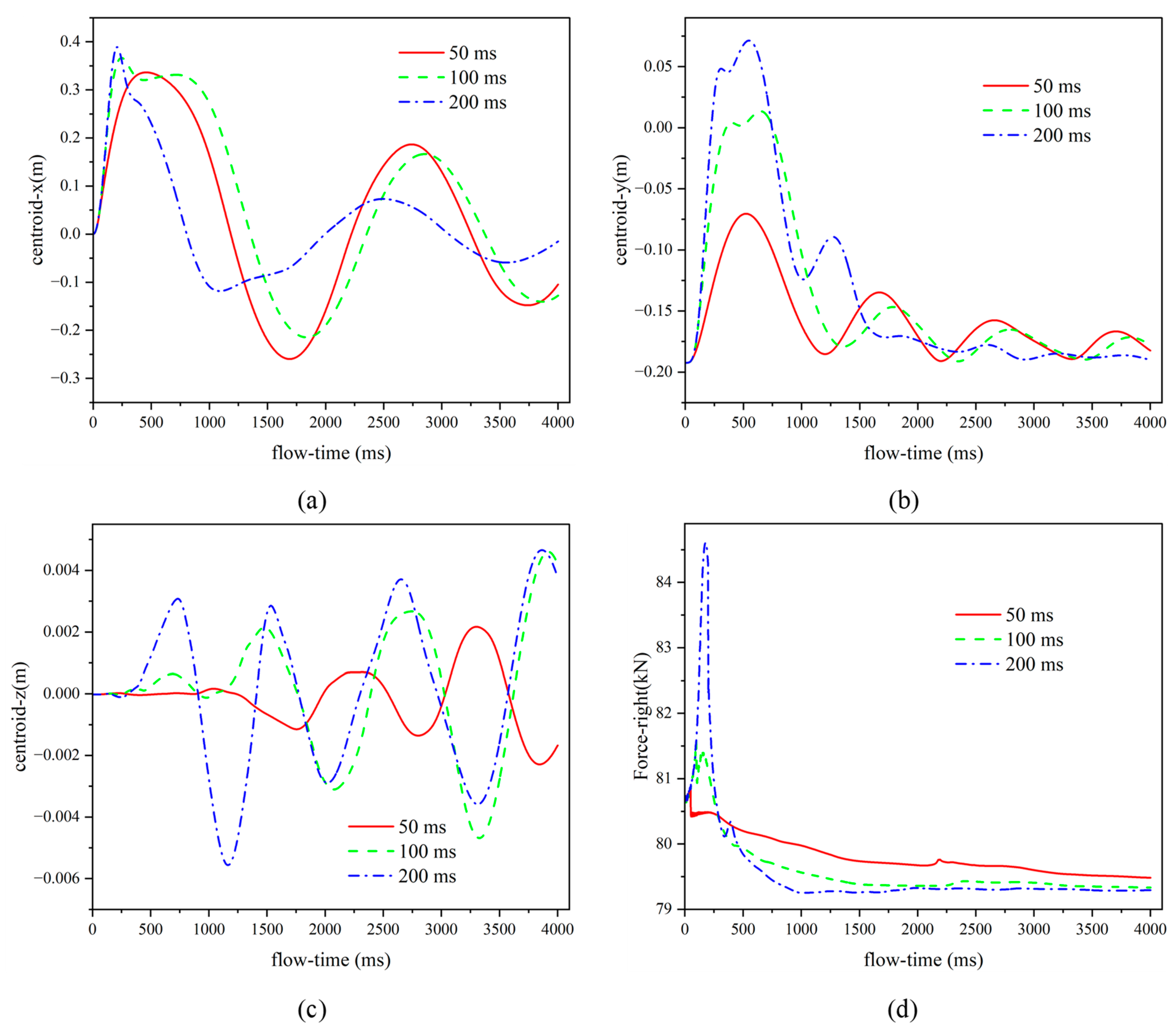
- Under extreme acceleration (5 g and 200 ms), the maximum growth of the force on the right wall is 3.89 kN. In addition, the acceleration magnitude and the duration of acceleration greatly affect the force variation on the right wall. With a duration of acceleration of 200 ms, the maximum increase in forces on the right wall is reduced by 80.57% at 2 g and 99.53% at 0.5 g, compared with the circumstances at 5 g. Meanwhile, at an acceleration magnitude of 5 g, the maximum growth of forces on the right wall is decreased by 71.80% at 100 ms and 88.63% at 50 ms in contrast to the circumstances at a duration of 200 ms. This can serve as a reference for the strength design of liquid hydrogen tanks for heavy-duty trucks.
- (3)
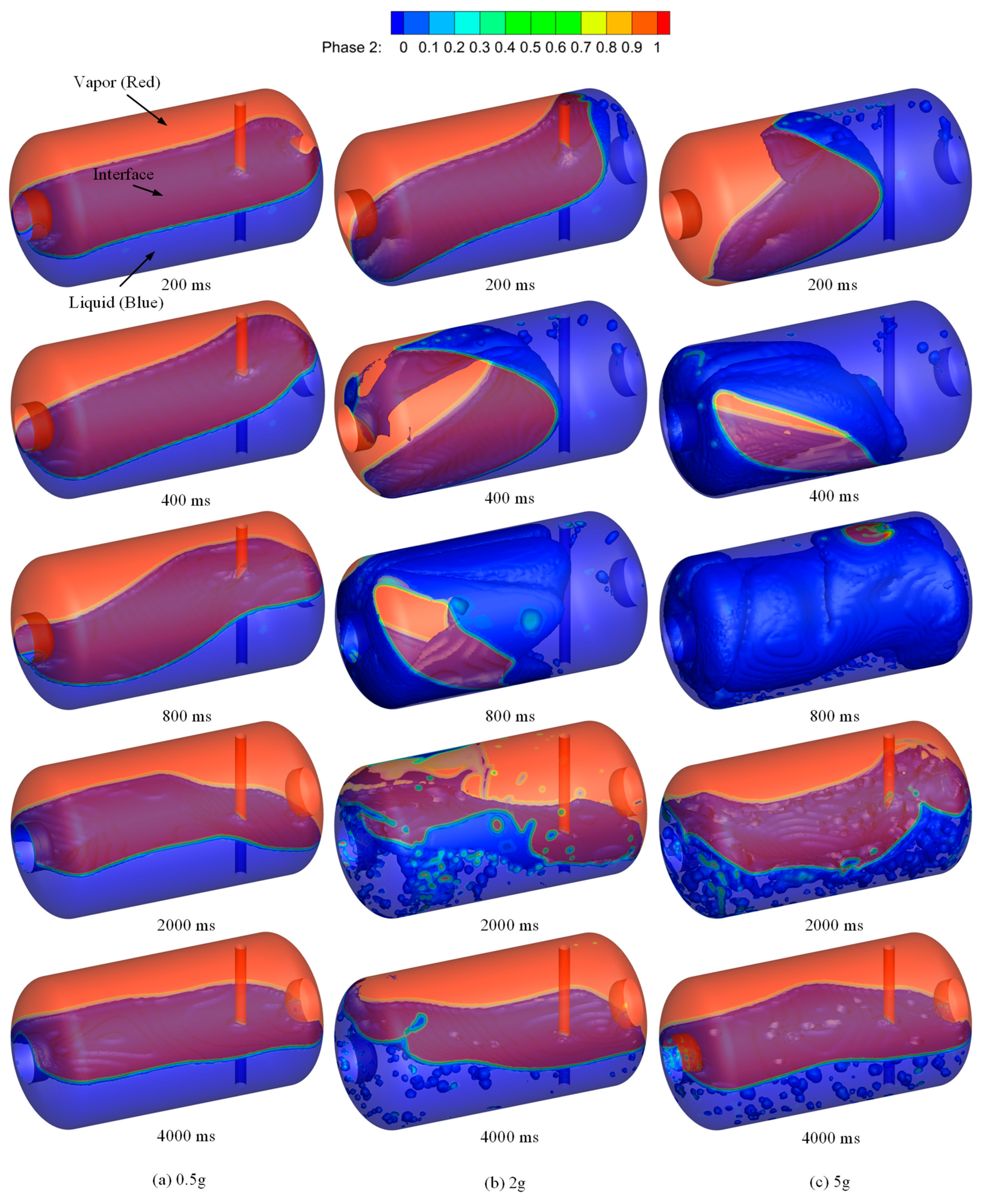
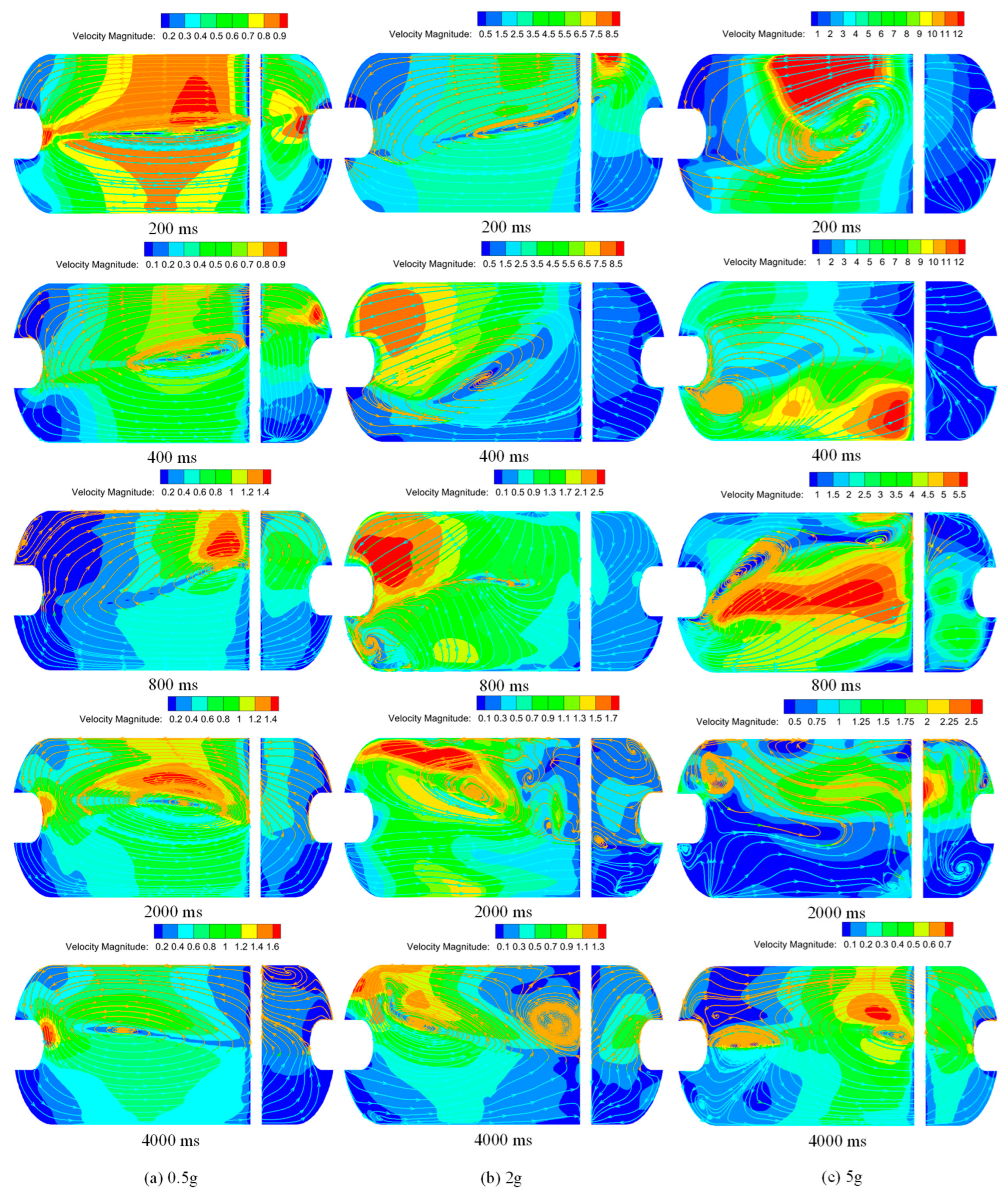
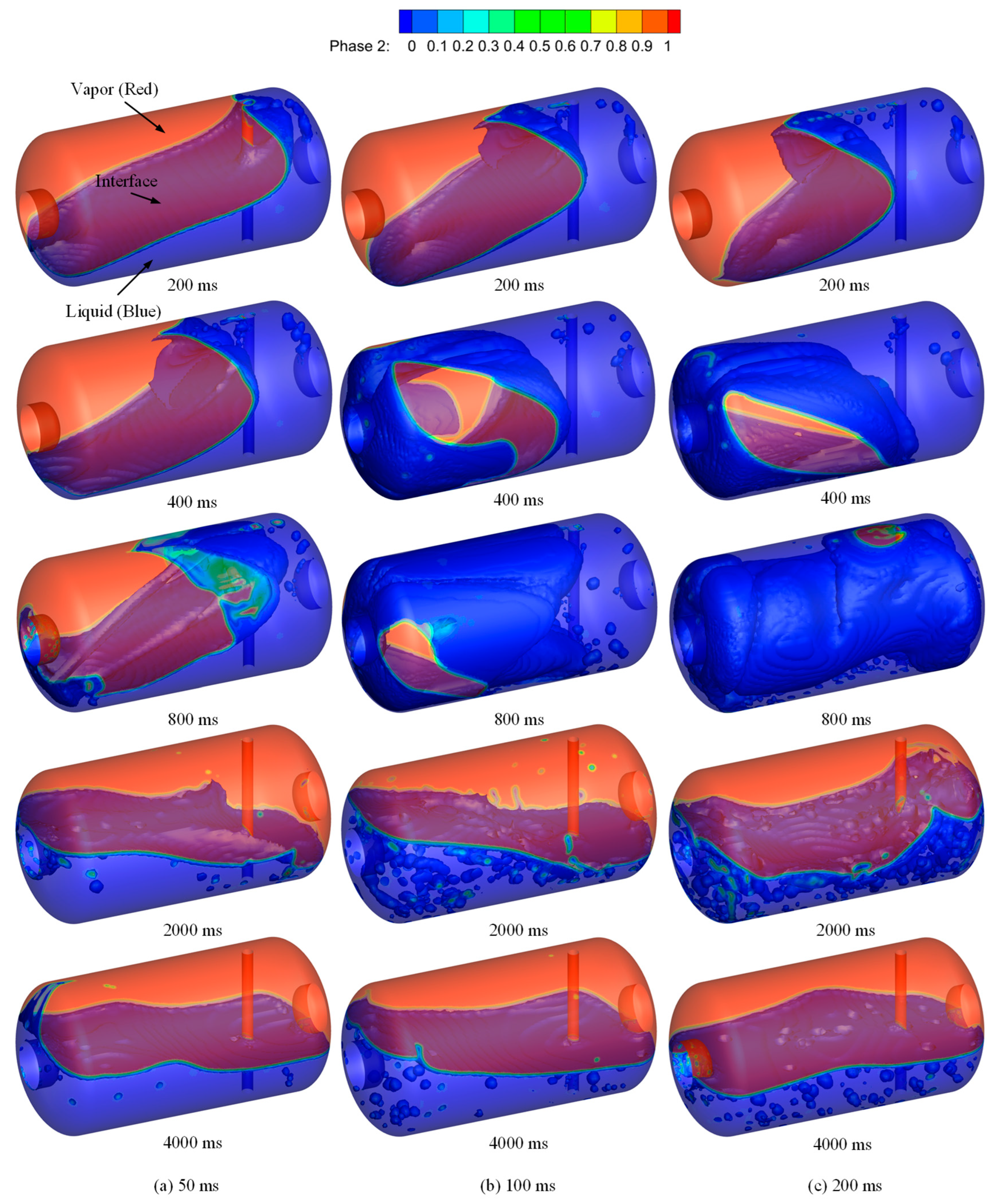
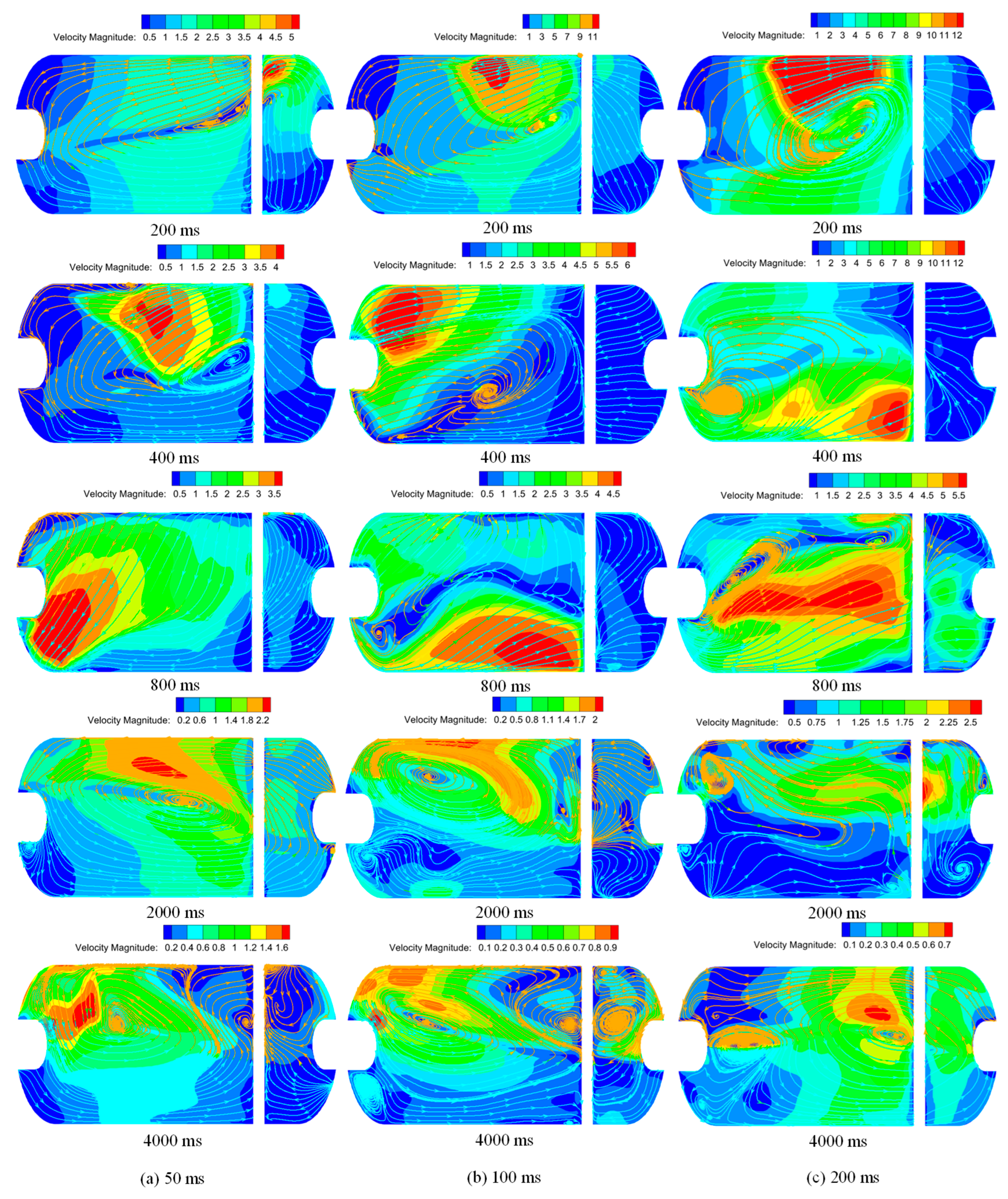
- When subjected to excitation with a large acceleration magnitude or a long acceleration duration, the liquid hydrogen within the tank is prone to a large-amplitude sloshing behavior, which can even cause the liquid hydrogen to turn over towards the top of the tank under the effects of inertia. In particular, in severe cases, under the effect of large-amplitude sloshing of liquid hydrogen, vapor may fill the bottom of the tank over a period of time. Moreover, after the liquid hydrogen falls back to the bottom under the gravity, it carries a large amount of vapor, and the liquid contains many bubbles.
- (4)
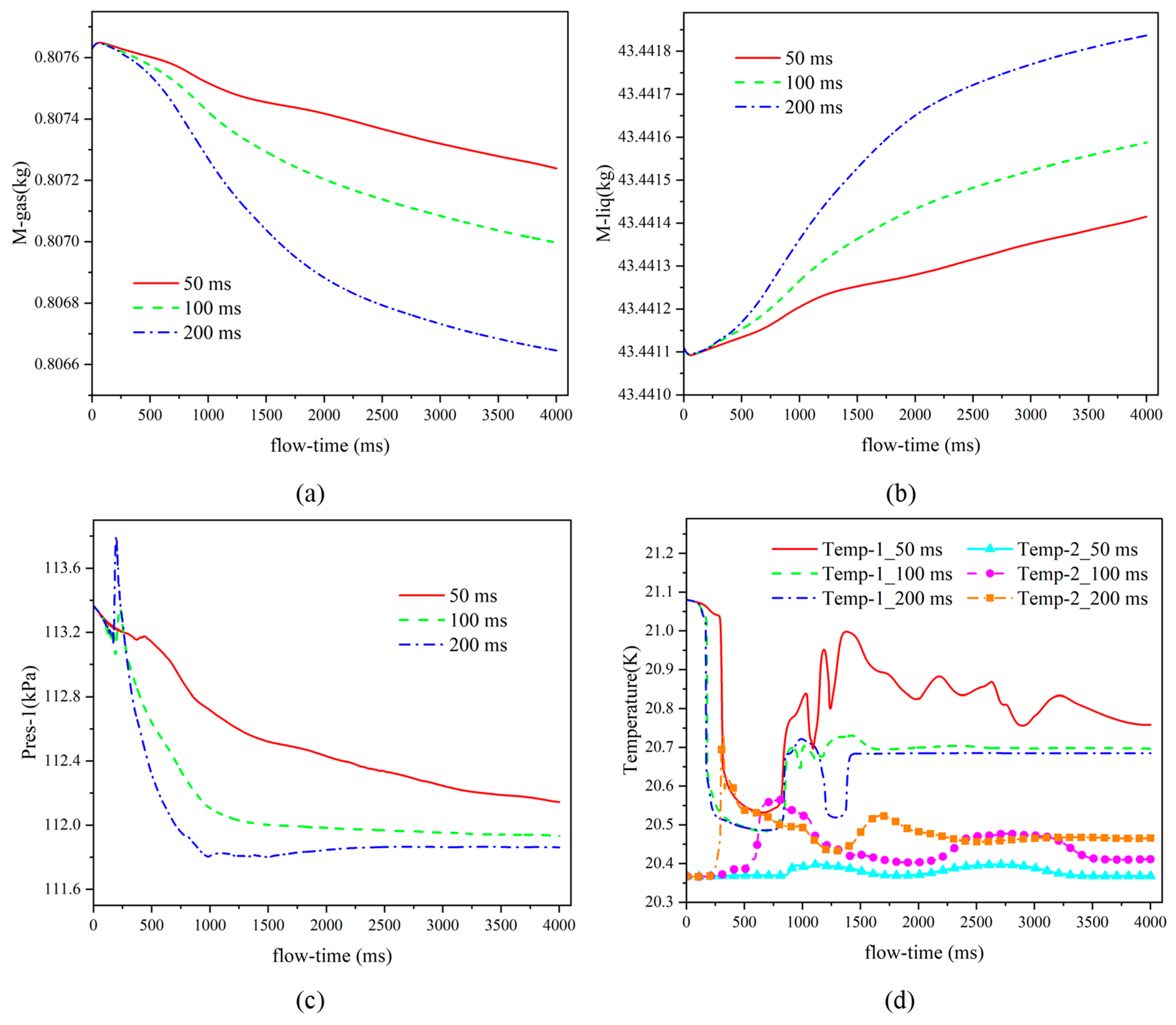
- The acceleration magnitude and duration have a significant effect on the ullage pressure and ultimate temperature differences between vapor and liquid. In contrast to the case at 5 g, the maximum reductions in ullage pressure are decreased by 9.46% and 55.02%, and the ultimate temperature differences between vapor and liquid increase by 8.60% and 189.59% at 2 g and 0.5 g, respectively. Furthermore, compared with the case at a duration of acceleration of 200 ms, the maximum ullage pressure drops are reduced by 8.17% and 21.62%, and the ultimate temperature differences between vapor and liquid increase by 29.41% and 76.92% at 100 ms and 50 ms, respectively.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shi, X.; Cai, L.; Li, Z.; Cui, Y. Exploring Technological Solutions for Onboard Hydrogen Storage Systems through a Heterogeneous Knowledge Network: From Current State to Future Research Opportunities. Front. Energy Res. 2022, 10, 2–16. [Google Scholar] [CrossRef]
- Inal, Ö.; Dere, Ç.; Deniz, C. Onboard hydrogen storage for ships: An overview. In Proceedings of the 5th International Hydrogen Technologies Congress (IHTEC-2021), Niğde, Turkey, 26–28 May 2021. [Google Scholar]
- Galassi, M.C.; Acosta-Iborra, B.; Baraldi, D.; Bonato, C.; Harskamp, F.; Frischauf, N.; Moretto, P. Onboard compressed hydrogen storage: Fast filling experiments and simulations. Energy Procedia 2012, 29, 192–200. [Google Scholar] [CrossRef]
- Aceves, S.M.; Berry, G.D.; Rambach, G.D. Insulated pressure vessels for hydrogen storage on vehicles. Int. J. Hydrogen Energy 1998, 23, 583–591. [Google Scholar] [CrossRef]
- Aceves, S.M.; Espinosa-Loza, F.; Ledesma-Orozco, E.; Ross, T.O.; Weisberg, A.H.; Brunner, T.C.; Kircher, O. High-density automotive hydrogen storage with cryogenic capable pressure vessels. Int. J. Hydrogen Energy 2010, 35, 1219–1226. [Google Scholar] [CrossRef]
- Ahluwalia, R.K.; Hua, T.Q.; Peng, J.K. On-board and Off-board performance of hydrogen storage options for light-duty vehicles. Int. J. Hydrogen Energy 2012, 37, 2891–2910. [Google Scholar] [CrossRef]
- Hwang, H.T.; Varma, A. Hydrogen storage for fuel cell vehicles. Curr. Opin. Chem. Eng. 2014, 5, 42–48. [Google Scholar] [CrossRef]
- Durbin, D.J.; Malardier-Jugroot, C. Review of hydrogen storage techniques for on board vehicle applications. Int. J. Hydrogen Energy 2013, 38, 14595–14617. [Google Scholar] [CrossRef]
- Felderhoff, M.; Weidenthaler, C.; von Helmolt, R.; Eberle, U. Hydrogen storage: The remaining scientific and technological challenges. Phys. Chem. Chem. Phys. 2007, 9, 2643–2653. [Google Scholar] [CrossRef] [PubMed]
- Raucci, C.; Calleya, J.; Suarez De La Fuente, S.; Pawling, R. Hydrogen on board ship: A first analysis of key parameters and implications. In Proceedings of the SCC Conference 2015, New York City, NY, USA, 27 June–2 July 2015; University of Strathclyde: Glasgow, UK, 2015. [Google Scholar]
- Mori, D.; Hirose, K. Recent challenges of hydrogen storage technologies for fuel cell vehicles. Int. J. Hydrogen Energy 2009, 34, 4569–4574. [Google Scholar] [CrossRef]
- Peschka, W. Hydrogen: The future cryo-fuel in internal combustion engines. Int. J. Hydrogen Energy 1998, 23, 27–43. [Google Scholar] [CrossRef]
- Escher, W.J.D. Hydrogen-fueled internal combustion engine, a technical survey of contemporary US projects. NASA STI/Recon Tech. Rep. N 1975, 76, 31692. [Google Scholar]
- Billings, R.E. Hydrogen Storage in Automobiles Using Cryogenics and Metal Hydrides. In Proceedings of the Hydrogen Economy Miami Energy (THEME) Conference, Miami Beach, FL, USA, 1–3 March 1975; pp. S8–S51. [Google Scholar]
- Zhang, Z.Y.; Wang, F.; Zhao, Y.Z.; Lu, M.; Lu, H. Review of research on hydrogen storage system of automobile based on Cryogenic technology. Cryog. Spec. Gas 2020, 38, 1–8. [Google Scholar]
- Ustolin, F.; Campari, A.; Taccani, R. An Extensive Review of Liquid Hydrogen in Transportation with Focus on the Maritime Sector. J. Mar. Sci. Eng. 2022, 10, 1222. [Google Scholar] [CrossRef]
- Michel, F.; Fieseler, H.; Meyer, G.; Theiβen, F. On-board equipment for liquid hydrogen vehicles. Int. J. Hydrogen Energy 1998, 23, 191–199. [Google Scholar] [CrossRef]
- Böhm, M.; Del Rey, A.F.; Pagenkopf, J.; Varela, M.; Herwartz-Polster, S.; Calderón, B.N. Review and comparison of worldwide hydrogen activities in the rail sector with special focus on on-board storage and refueling technologies. Int. J. Hydrogen Energy 2022, 47, 38003–38017. [Google Scholar] [CrossRef]
- Nie, Z.S.; Li, Q.; Hong, G.T.; Yu, X.E. Theoretical and experimental study on evaporation Rate of liquid hydrogen Dewar on vehicle. Cryog. Eng. 2004, 4, 55–58. [Google Scholar]
- Escher, W.J.D. Survey of Liquid Hydrogen Container Techniques for Highway Vehicle Fuel System Applications; Escher Technology Associates: St. Johns, MI, USA, 1978. [Google Scholar]
- Michel, F.; Fieseler, H.; Allidieres, L. Liquid hydrogen technologies for mobile use. In Proceedings of the WHEC, Lyon, France, 13–16 June 2006; p. 16. [Google Scholar]
- Ahluwalia, R.K.; Hua, T.Q.; Peng, J.K.; Lasher, S.; McKenney, K.; Sinha, J.; Gardiner, M. Technical assessment of cryo-compressed hydrogen storage tank systems for automotive applications. Int. J. Hydrogen Energy 2010, 35, 4171–4184. [Google Scholar] [CrossRef]
- Maekawa, K.; Takeda, M.; Matsuno, Y.; Fujikawa, S.; Kuroda, T.; Kumakura, H. Fundamental study of tank with MgB2 level sensor for transportation of liquid hydrogen. Phys. Procedia 2015, 67, 1164–1168. [Google Scholar] [CrossRef]
- Wallner, T.; Lohse-Busch, H.; Gurski, S.; Duoba, M.; Thiel, W.; Martin, D.; Korn, T. Fuel economy and emissions evaluation of BMW Hydrogen 7 Mono-Fuel demonstration vehicles. Int. J. Hydrogen Energy 2008, 33, 7607–7618. [Google Scholar] [CrossRef]
- Schultheiß, D. Permeation Barrier for Lightweight Liquid Hydrogen Tanks; U.S. Department of Energy Office of Scientific and Technical Information: Oak Ridge, TN, USA, 2007.
- Miao, C.; Zhang, Y.; Huang, L. Key Technologies of Vehicle Liquid Hydrogen Container. Cryog. Supercond. 2022, 50, 71–74. [Google Scholar] [CrossRef]
- Wei, J.Y.; Song, J.J.; Liu, B. Experimental study on Sealing Performance of Liquid Hydrogen Valve of Hydrogen Energy Vehicle and Real Medium. Vac. Cryog. 2021, 27, 378–384. [Google Scholar]
- Wang, X.; Duan, W.H.; Wu, H.M.; Wang, Y.H. Design of Control Module for Vehicle Liquid Hydrogen Storage and Supply System. Manuf. Upgrad. Today 2022, 5, 67–69. [Google Scholar]
- Zhao, K. Research on Heat Transfer of Vehicle-Mounted Liquid Hydrogen Vaporizer; The First Research Institute of China Aerospace Science and Technology Corporation: Beijing, China, 2018. [Google Scholar]
- Zhang, X.B. Research on Ultimate Bearing Capacity of Cryogenic Liquid Hydrogen Tank; Taiyuan University of Technology: Taiyuan, China, 2020. [Google Scholar] [CrossRef]
- Yang, M.; Hu, S.; Yang, F.; Xu, L.; Bu, Y.; Yuan, D. On-Board Liquid Hydrogen Cold Energy Utilization System for a Heavy-Duty Fuel Cell Hybrid Truck. World Electr. Veh. J. 2021, 12, 136. [Google Scholar] [CrossRef]
- Rao, G.L. Performance Research and Improvement of Hydrogen Vehicle Powertrain; Shanghai Jiao Tong University: Shanghai, China, 2013. [Google Scholar]
- Li, H.; Hu, Z.Y.; Hu, J.Y.; Dong, J.C.; Li, J.Q.; Xu, L.F.; Ouyang, M.G.; Bu, Y.; Wang, L.J.; Qin, Z.D. Design, Analysis and Validation of a New Distributed Drive Liquid Hydrogen Fuel Cell Heavy Duty Commercial Vehicle. Automot. Eng. 2022, 44, 1183–1198+1250. [Google Scholar] [CrossRef]
- Kartuzova, O.; Kassemi, M. Validation of a CFD Model Predicting the Effect of High Level Lateral Acceleration Sloshing on the Heat Transfer and Pressure Drop in a Small-Scale Tank in Normal Gravity. In Proceedings of the ASME 2018 5th Joint US-European Fluids Engineering Division Summer Meeting, Montreal, QC, Canada, 15–18 July 2018. [Google Scholar]
- Konopka, M.; Noeding, P.; Klatte, J.; Behruzi, P.; Gerstmann, J.; Stark, A.; Darkow, N. Analysis of LN2 filling, draining, stratification and sloshing experiments. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016; p. 4272. [Google Scholar]
- Ludwig, C.; Dreyer, M.E.; Hopfinger, E.J. Pressure variations in a cryogenic liquid storage tank subjected to periodic excitations. Int. J. Heat Mass Transf. 2013, 66, 223–234. [Google Scholar] [CrossRef]
- Arndt, T.; Dreyer, M.; Behruzi, P.; Winter, M. Laterally excited sloshing tests with liquid nitrogen LN2. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Hartford, CT, USA, 21–23 July 2008; p. 4551. [Google Scholar]
- Zhou, Q.Q.; Tan, Y.H.; Xu, Z.L.; Wang, J.; Wang, Z. Numerical Simulation of Propellant Slosh in Cylindrical Tank of Launch Vehicle. Propuls. Technol. 2022, 43, 358–364. [Google Scholar] [CrossRef]
- Yang, H.; Peugeot, J. Propellant sloshing parameter extraction from CFD analysis. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010; p. 6889. [Google Scholar]
- Kim, S.; West, J. Sloshing in the Liquid Hydrogen and Liquid Oxygen Propellant Tanks After Main Engine Cut Off. In Proceedings of the JANNAF 5th Spacecraft Propulsion Subcommittee Meeting, Huntsville, AL, USA, 5–9 December 2011. (M11-1244). [Google Scholar]
- Arndt, T.; Dreyer, M.; Behruzi, P.; Winter, M.; vanForeest, A. Cryogenic sloshing tests in a pressurized cylindrical reservoir. In Proceedings of the 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Denver, Colorado, 2–5 August 2009; p. 4860. [Google Scholar]
- Lacapere, J.; Vielle, B.; Legrand, B. Experimental and numerical results of sloshing with cryogenic fluids. Prog. Propuls. Phys. 2009, 1, 267–278. [Google Scholar]
- Moran, M.E.; McNelis, N.B.; Kudlac, M.T.; Haberbusch, M.S.; Satornino, G.A. Experimental results of hydrogen slosh in a 62 cubic foot (1750 liter) tank. In Proceedings of the Joint Propulsion Conference, Indianapolis, IN, USA, 27–29 June 1994. (E-8916). [Google Scholar]
- Berglund, M.D.; Bassett, C.E.; Kelso, J.M.; Mishic, J.; Schrage, D. The Boeing Delta IV launch vehicle—Pulse-settling approach for second-stage hydrogen propellant management. Acta Astronaut. 2007, 61, 416–424. [Google Scholar] [CrossRef]
- Sherif, S.A.; Zeytinoglu, N.; Veziroǧlu, T.N. Liquid hydrogen: Potential, problems, and a proposed research program. Int. J. Hydrogen Energy 1997, 22, 683–688. [Google Scholar] [CrossRef]
- Chung, S.M.; Jeon, G.M.; Park, J.C. Numerical approach to analyze fluid flow in a type C tank for liquefied hydrogen carrier (part 1: Sloshing flow). Int. J. Hydrogen Energy 2022, 47, 5609–5626. [Google Scholar] [CrossRef]
- Liu, R. Influence of Liquid Sloshiness on Vibration Characteristics of Truck-Mounted LNG Gas Tanks and Its Measures; Dalian University of Technology: Dalian, China, 2020. [Google Scholar] [CrossRef]
- Zhang, H.T. Numerical Study on Nonlinear Slosh of Liquid and Its Application in Tank Vehicle; Southeast University: Nanjing, China, 2016. [Google Scholar]
- Himeno, T.; Ohashi, A.; Anii, K.; Daichi, H.; Sakuma, Y.; Watanabe, T.; Inoue, C.; Umemura, Y.; Negishi, H.; Nonaka, S. Investigation on phase change and pressure drop enhanced by violent sloshing of cryogenic fluid. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018; p. 4755. [Google Scholar]
- Xu, H.Y.; Yang, N.X.; Liang, L.; Liu, R.; Fan, H.G.; Liu, P.Q. Comparison of Numerical Analysis Methods for Liquid Slosh in Vehicle LNG Tanks. Press. Vessel 2021, 38, 44–52. [Google Scholar]
- Liu, Z.; Feng, Y.Y.; Li, Y.Z. Dynamic response of slosh at free interface of Cryogenic liquid oxygen tank. J. Eng. Phys. 2020, 41, 1087–1094. [Google Scholar]
- Liu, D.Y. Dynamic Characteristics Analysis of Truck-Mounted LNG Tanks; Lanzhou University of Technology: Lanzhou, China, 2016. [Google Scholar]
- Zhang, E.; Zhu, W.; Wang, L. Influencing analysis of different baffle factors on oil liquid sloshing in automobile fuel tank. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3180–3193. [Google Scholar] [CrossRef]
- Zhao, G.Y.; Chen, S.P.; Xie, G.F. Effect of slosh on Heat Transfer and Pressure Drop of Liquid Hydrogen Tank. Cryog. Supercond. 2020, 48, 30–36. [Google Scholar] [CrossRef]
- Himeno, T.; Sugimori, D.; Ishikawa, K.; Umemura, Y.; Uzawa, S.; Inoue, C.; Watanabe, T.; Nonaka, S.; Naruo, Y.; Inatani, Y.; et al. Heat exchange and pressure drop enhanced by sloshing. In Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, CA, USA, 31 July–3 August 2011; p. 5682. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid | Initial Liquid Level | Initial Pressure | Initial Temperature | A | τ | τe |
|---|---|---|---|---|---|---|
| (Gas/Liquid) | ||||||
| Liquid hydrogen–Hydrogen | 143 mm | 0.31 MPa | 38 K/22 K | 0.5 g | 0.56 s | 0.448 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Bu, Y.; Gao, W.; Xie, F.; Guo, W.; Li, Y. Numerical Study on Thermodynamic Coupling Characteristics of Fluid Sloshing in a Liquid Hydrogen Tank for Heavy-Duty Trucks. Energies 2023, 16, 1851. https://doi.org/10.3390/en16041851
Zhu Y, Bu Y, Gao W, Xie F, Guo W, Li Y. Numerical Study on Thermodynamic Coupling Characteristics of Fluid Sloshing in a Liquid Hydrogen Tank for Heavy-Duty Trucks. Energies. 2023; 16(4):1851. https://doi.org/10.3390/en16041851
Chicago/Turabian StyleZhu, Yuhao, Yu Bu, Wanli Gao, Fushou Xie, Wan Guo, and Yanzhong Li. 2023. "Numerical Study on Thermodynamic Coupling Characteristics of Fluid Sloshing in a Liquid Hydrogen Tank for Heavy-Duty Trucks" Energies 16, no. 4: 1851. https://doi.org/10.3390/en16041851
APA StyleZhu, Y., Bu, Y., Gao, W., Xie, F., Guo, W., & Li, Y. (2023). Numerical Study on Thermodynamic Coupling Characteristics of Fluid Sloshing in a Liquid Hydrogen Tank for Heavy-Duty Trucks. Energies, 16(4), 1851. https://doi.org/10.3390/en16041851