
Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines—A Review





Abstract
1. Introduction
2. Multiple Three-Phase Machine Modelling Methods
2.1. Vsd Model
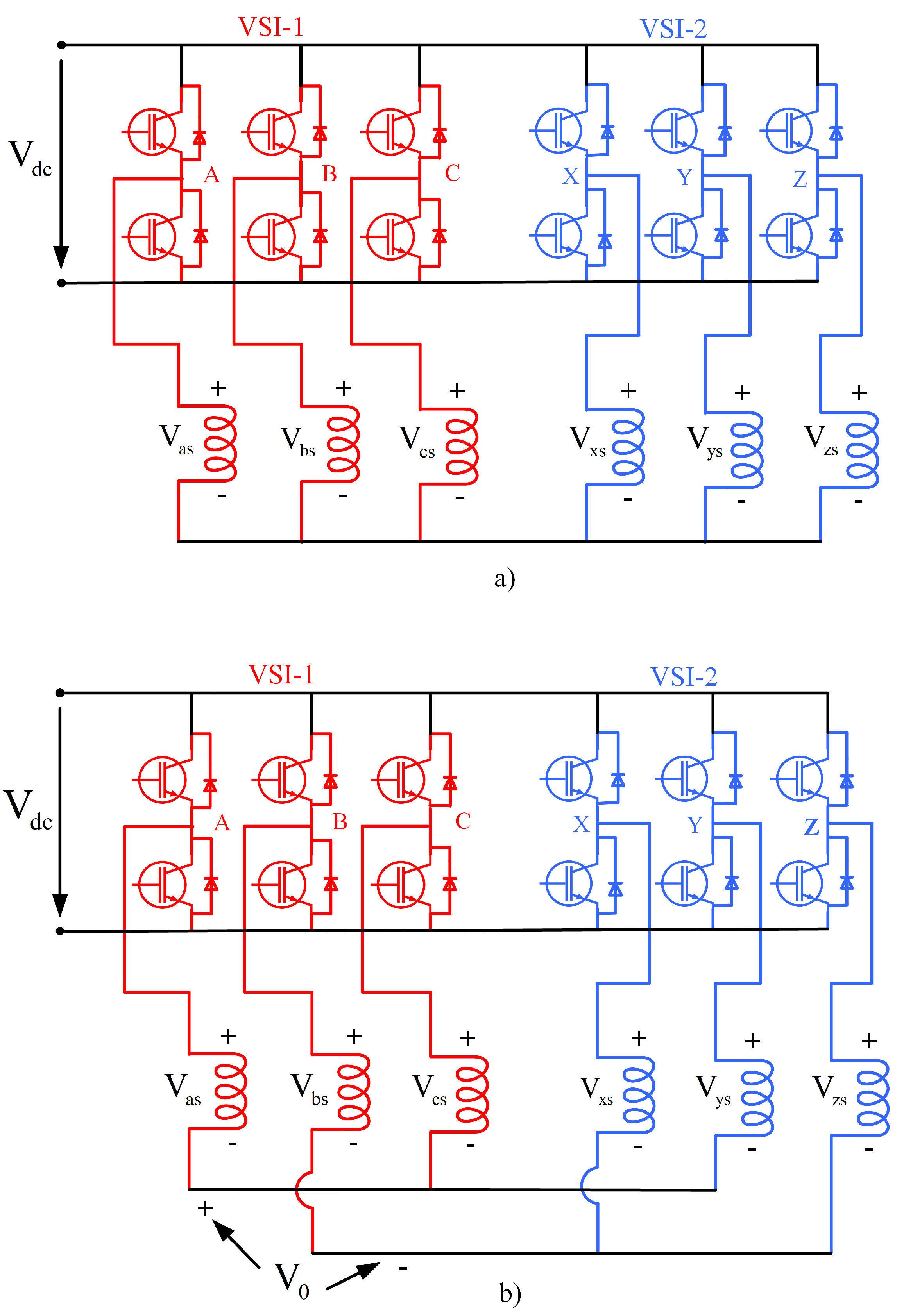
2.2. Multiple Individual Three-Phase PMSM Model
3. Model-Based Sensorless Control Methods
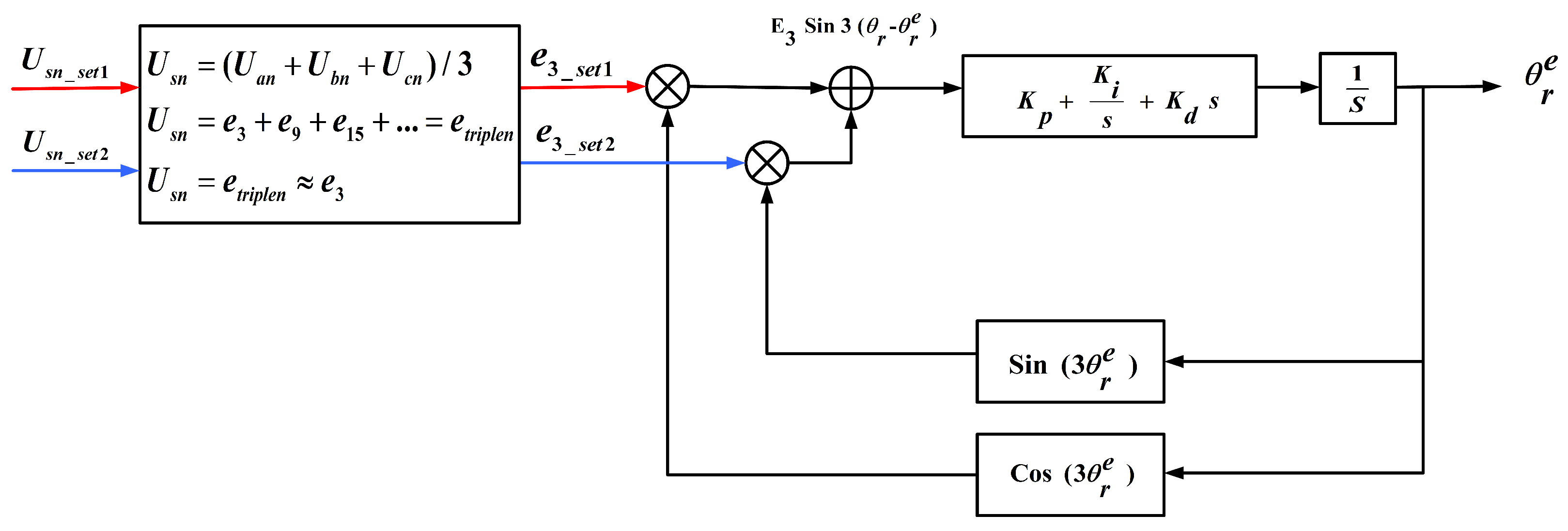
3.1. Flux or EMF Estimation
3.2. Position/Speed Observer
3.2.1. Extended Kalman Filter (EKF)
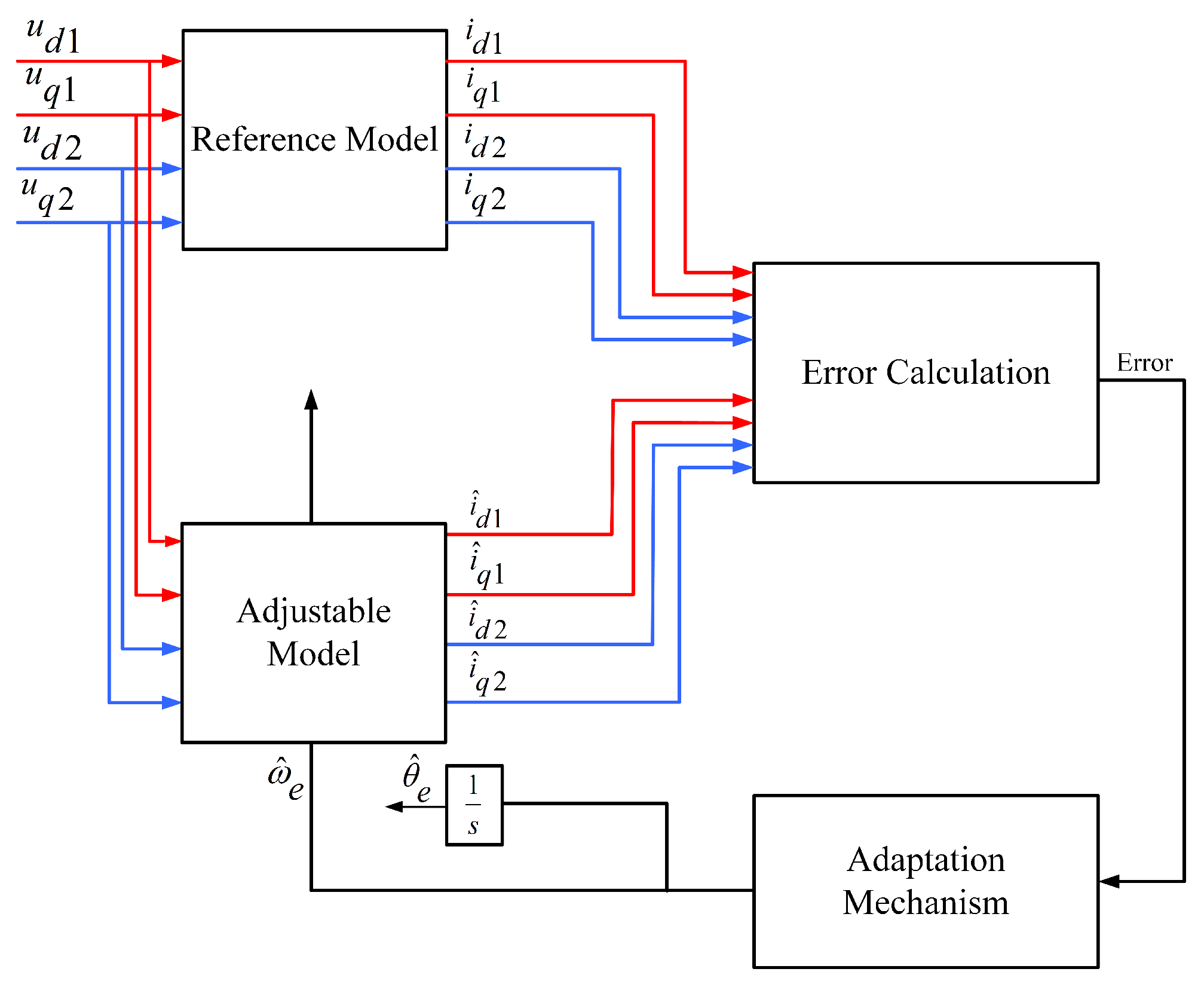
3.2.2. Model Reference Adaptive System (MRAS)
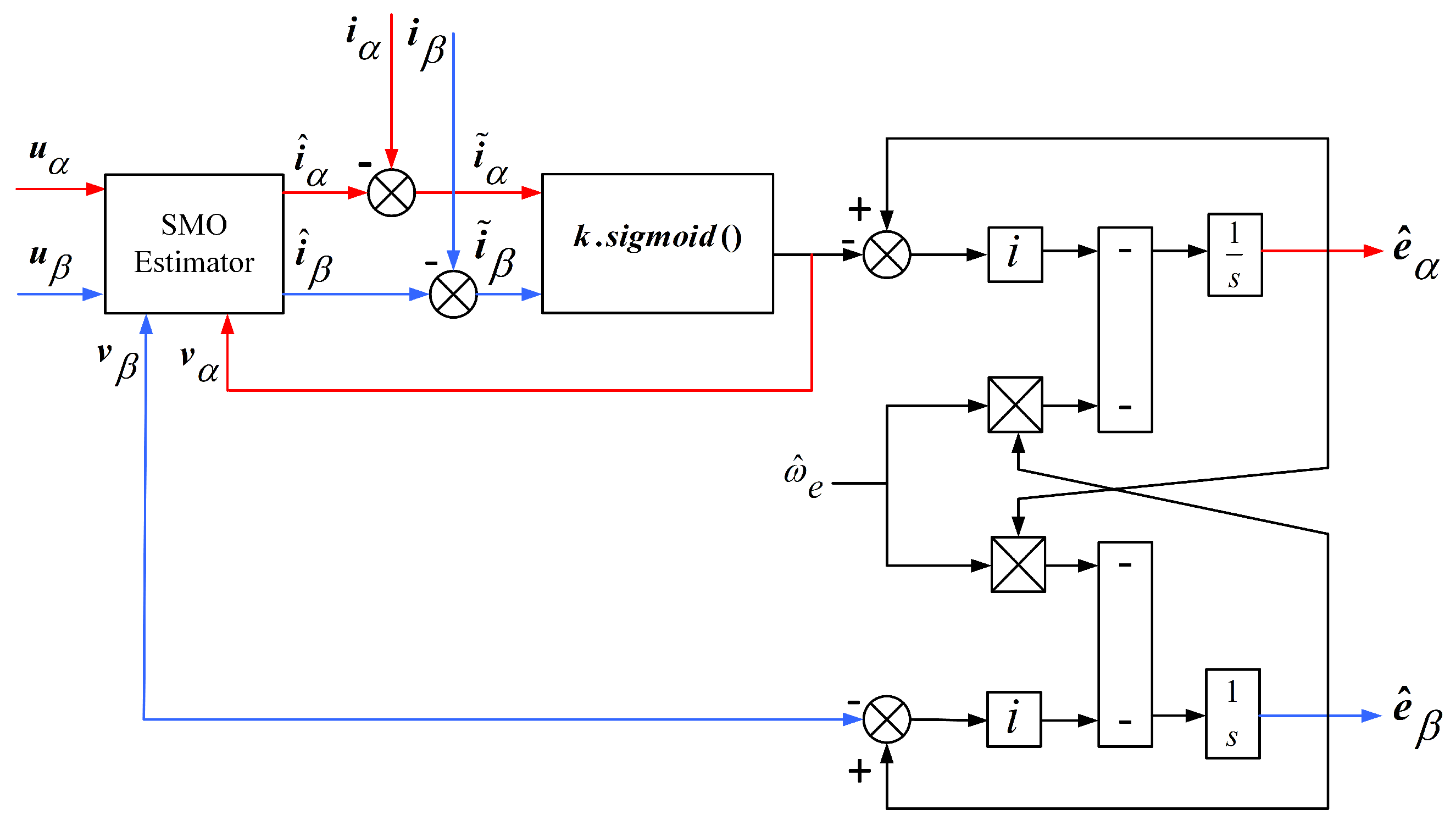
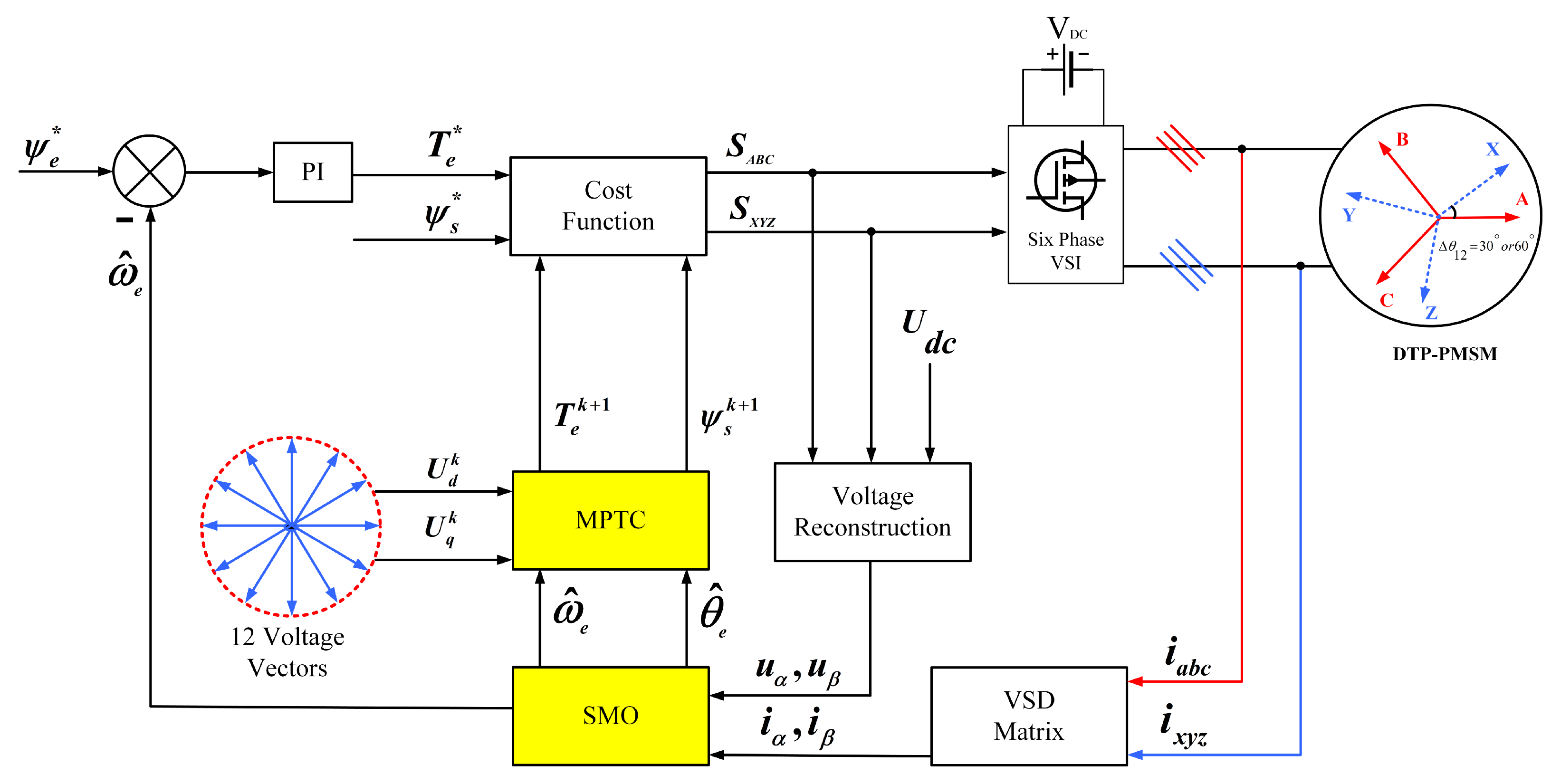
3.2.3. Sliding-Mode Observer
3.2.4. Luenberger Observer
4. Saliency-Based Sensorless Control Methods
4.1. SI-Based Systems
4.1.1. Voltage Injection


4.1.2. Current Injection
4.2. Pulsating Signal Injection
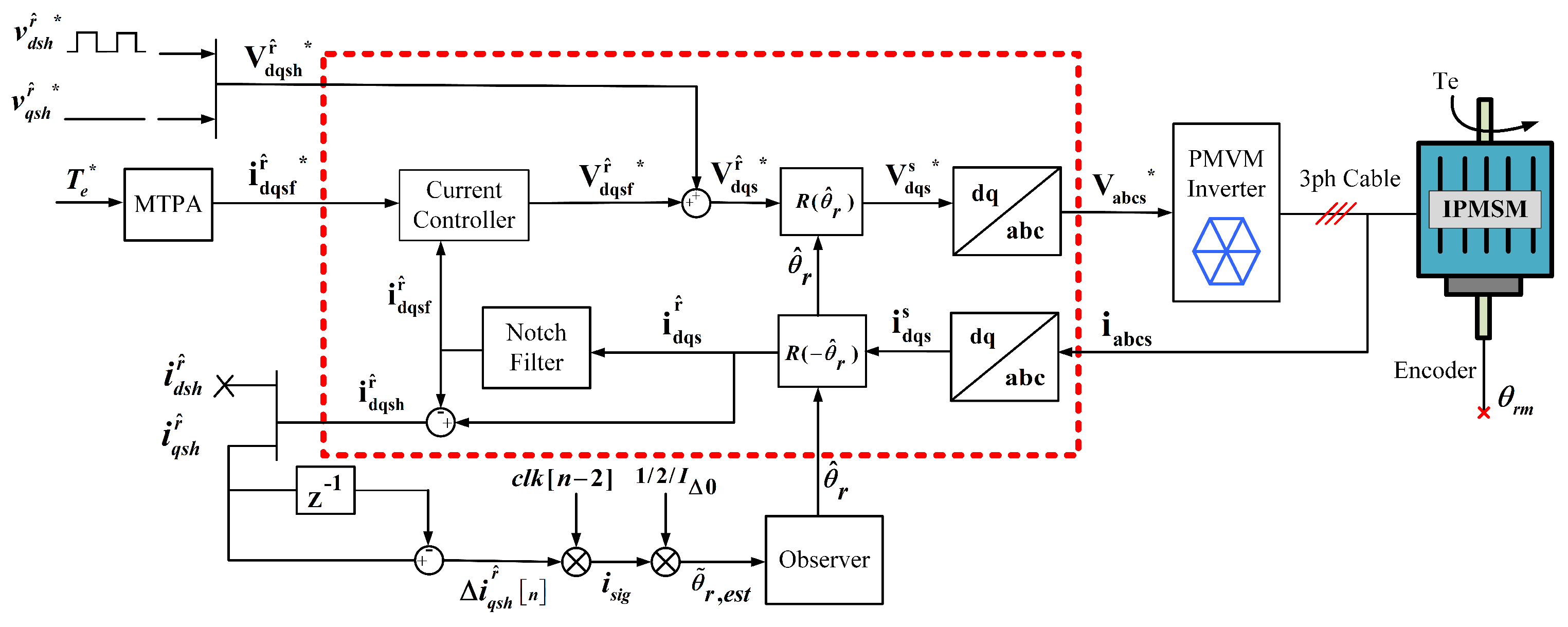
Square-Wave Sensorless Injection
4.3. Fundamental PWM Excitation
5. Combination of Low-Speed and High-Speed Methods
6. Fault-Tolerant Sensorless Control for DTP-PMSMs
7. Applications and Applied Sensorless Control Techniques of DTP-PMSMs
8. Conclusions
- Some applications, such as aircraft, need an ultra-fast, sensorless DTP-PMSM drive; however, researchers are now faced with the difficulty of figuring out how to acquire the position information under low carrier ratios.
- Improving the dynamic performance of position sensorless drives for DTP-PMSM is difficult in comparison to motor drives that include a position sensor. It is envisaged that there will be a greater focus on optimising dynamic sensorless performance for use in high-performance applications in the future.
- PMSM characteristics are known to fluctuate significantly with load changes. It therefore is necessary to improve the robustness of the sensorless PMSM drives to machine parameter fluctuation in order to acquire the rotor position accurately across a broad range of loads.
- For preferable performance, a combination of two or more techniques is beneficial for estimating the rotor position. Very few studies have been conducted on this for DTP-PMSMs, which might be a promising area for future study.
- In order to further strengthen the power density and the reliability of the electric actuating system, a sensorless control strategy for fault-tolerant operation (e.g., losing one set of three-phase windings) of DTP-PMSM is important. From the literature reviewed in this article, there are few publications that explain how to control the fault-tolerant operation of DTP-PMSM without sensors at both high and low speeds, which could be an interesting topic for research in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Symbols
| Symbols | Description | Symbols | Description |
| stator resistance | s | derivative | |
| electrical angular speed | carrier frequency | ||
| , | permanent magnet flux linkage | flux linkage | |
| , | voltages of the first winding set | u, i | voltage, current |
| , | currents of the first winding set | electrical rotor position in radians | |
| , | voltages of the second winding set | carrier voltage | |
| , | currents of the second winding set | electromagnetic torque | |
| , | -axis inductances | , , | values of the PID controller |
| , | mutual inductances | , | estimated rotor position |
References
- Alves de Souza, S.; Issamu Suemitsu, W. Five-Phase Permanent-Magnet Synchronous Motor. IEEE Lat. Am. Trans. 2017, 15, 639–645. [Google Scholar] [CrossRef]
- Jung, E.; Yoo, H.; Sul, S.K.; Choi, H.S.; Choi, Y.Y. A Nine-Phase Permanent-Magnet Motor Drive System for an Ultrahigh-Speed Elevator. IEEE Trans. Ind. Appl. 2012, 48, 987–995. [Google Scholar] [CrossRef]
- Eldeeb, H.M.; Abdel-Khalik, A.S.; Hackl, C.M. Dynamic Modeling of Dual Three-Phase IPMSM Drives With Different Neutral Configurations. IEEE Trans. Ind. Electron. 2019, 66, 141–151. [Google Scholar] [CrossRef]
- Teymoori, V.; Eskandaria, N.; Arish, N.; Khalili, A. Design of permanent magnetic motor speed controller drive with power supply inverter based on a new switching method. In Proceedings of the 2019 International Power System Conference (PSC), Tehran, Iran, 9–11 December 2019; pp. 453–458. [Google Scholar] [CrossRef]
- Parsa, L.; Toliyat, H. Multi-phase permanent magnet motor drives. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; Volume 1, pp. 401–408. [Google Scholar] [CrossRef]
- Parsa, L.; Toliyat, H.A. Sensorless Direct Torque Control of Five-Phase Interior Permanent-Magnet Motor Drives. IEEE Trans. Ind. Appl. 2007, 43, 952–959. [Google Scholar] [CrossRef]
- Pulvirenti, M.; Da Rù, D.; Bianchi, N.; Scarcella, G.; Scelba, G. Secondary saliencies decoupling technique for self-sensing integrated multi-drives. In Proceedings of the 2016 IEEE Symposium on Sensorless Control for Electrical Drives (SLED), Nadi, Fiji, 5–6 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Arish, N.; Ardestani, M.; Teymoori, V. Comparison of Dual Stator Consequent-pole Linear Permanent Magnet Vernier Machine with Toroidal and Concentrated Winding. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Yan, L.; Zhu, Z.Q.; Qi, J.; Ren, Y.; Gan, C.; Brockway, S.; Hilton, C. Suppression of Major Current Harmonics for Dual Three-Phase PMSMs by Virtual Multi Three-Phase Systems. IEEE Trans. Ind. Electron. 2022, 69, 5478–5490. [Google Scholar] [CrossRef]
- Slunjski, M.; Dordevic, O.; Jones, M.; Levi, E. Symmetrical/Asymmetrical Winding Reconfiguration in Multiphase Machines. IEEE Access 2020, 8, 12835–12844. [Google Scholar] [CrossRef]
- Zhao, Y.; Lipo, T. Space vector PWM control of dual three-phase induction machine using vector space decomposition. IEEE Trans. Ind. Appl. 1995, 31, 1100–1109. [Google Scholar] [CrossRef]
- Shao, B.; Zhu, Z.Q.; Feng, J.H.; Guo, S.Y.; Li, Y.F.; Feng, L.; Shuang, B. Improved Direct Torque Control Method for Dual-Three-Phase Permanent-Magnet Synchronous Machines With Back EMF Harmonics. IEEE Trans. Ind. Electron. 2021, 68, 9319–9333. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, W.; Shen, X. Comparative study of Field-Oriented Control in different coordinate systems for DTP-PMSM. In Proceedings of the 2013 International Conference on Electrical Machines and Systems (ICEMS), Busan, Republic of Korea, 26–29 October 2013; pp. 1015–1019. [Google Scholar] [CrossRef]
- Singh, S.; Tiwari, A.N. Various techniques of sensorless speed control of PMSM: A review. In Proceedings of the 2017 Second International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 22–24 February 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Robeischl, E.; Schroedl, M. Optimized INFORM measurement sequence for sensorless PM synchronous motor drives with respect to minimum current distortion. IEEE Trans. Ind. Appl. 2004, 40, 591–598. [Google Scholar] [CrossRef]
- Wang, S.; Imai, K.; Doki, S. Analysis of an Application of the Extended Electromotive Force Model Based Position Sensorless Control on the Wound-Field Synchronous Motor with Dual-Three Phases in Standstill/Low Speed Region. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5789–5794. [Google Scholar] [CrossRef]
- Wang, G.; Valla, M.; Solsona, J. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Shao, B.; Yan, L.; Xu, P.; Ren, Y. Advances in Dual-Three-Phase Permanent Magnet Synchronous Machines and Control Techniques. Energies 2021, 14, 7508. [Google Scholar] [CrossRef]
- Ahmad, M.; Zhang, W.; Gao, Q. Low and zero speed position estimation of dual three-phase PMSMs based on the excitation of PWM waveforms. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 1652–1658. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, Z.Q.; Odavic, M. Comparison of Two-Individual Current Control and Vector Space Decomposition Control for Dual Three-Phase PMSM. IEEE Trans. Ind. Appl. 2017, 53, 4483–4492. [Google Scholar] [CrossRef]
- Wang, B.; Wei, G.; Chu, J.; Yi, G. A novel modeling for a dual three-phase permanent magnet synchronous machine. In Proceedings of the 2008 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 1630–1634. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M.; Ren, N. Vector space decomposition based control of neutral-point-clamping (NPC) three-level inverters fed dual three-phase PMSM drives. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 2988–2993. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, Z.Q.; Liu, K. Current Control for Dual Three-Phase Permanent Magnet Synchronous Motors Accounting for Current Unbalance and Harmonics. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 272–284. [Google Scholar] [CrossRef]
- Imai, K.; Doki, S.; Fujii, K.; Jung, S. Position sensorless control for wound-field synchronous motor with double three-phase wound stator using extended electromotive force model. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 492–497. [Google Scholar] [CrossRef]
- Liu, T.; Zhu, Z.Q.; Wu, Z.Y.; Stone, D.; Foster, M. A Simple Sensorless Position Error Correction Method for Dual Three-Phase Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2021, 36, 895–906. [Google Scholar] [CrossRef]
- Scelba, G.; Scarcella, G.; Cacciato, M.; Pulvirenti, M.; Testa, A. Compensation of rotor positon estimation errors in sensorless dual-three phase PMSM drives through back-EMF sensing. In Proceedings of the 2017 IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 199–206. [Google Scholar] [CrossRef]
- Liu, J.; Zhu, Z. Rotor position estimation for dual-three-phase permanent magnet synchronous machine based on third harmonic back-EMF. In Proceedings of the 2015 IEEE Symposium on Sensorless Control for Electrical Drives (SLED), Sydney, Australia, 7–8 June 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Ren, Y.; Zhu, Z.Q. Sensorless switching-table-based direct torque control for dual three-phase PMSM drives. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 1616–1621. [Google Scholar] [CrossRef]
- Liu, J.; Zhu, Z.Q. Rotor position estimation for single- and dual-three-phase permanent magnet synchronous machines based on third harmonic back-EMF under imbalanced situation. Chin. J. Electr. Eng. 2017, 3, 63–72. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Ren, Y.; Zhu, Z.Q. Influence of back-EMF and current harmonics on sensorless control performance of single and dual three-phase permanent magnet synchronous machines. Compel-Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 744–763. [Google Scholar] [CrossRef]
- Fan, L.; Yang, T.; Rashed, M.; Bozhko, S. Sensorless control of dual-three phase PMSM based aircraft electric starter/generator system using model reference adaptive system method. In Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems (AUS 2018), Guiyang, China, 19–22 June 2018; pp. 787–794. [Google Scholar] [CrossRef]
- He, Y.; Hu, W.; Wang, Y.; Wu, J.; Wang, Z. Speed and Position Sensorless Control for Dual-Three-Phase PMSM Drives. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 945–950. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, T.; Khowja, M.; La Rocca, A.; Nasir, U.; Chowdhury, S.; Evans, D.; Kember, D.; Klonowski, T.; Arnaud, Y.; et al. Mild hybridisation of turboprop engine with high-power-density integrated electric drives. IEEE Trans. Transp. Electrif. 2022, 8, 4148–4162. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, T.; Fan, L.; Bozhko, S. Sensorless Control Design of High-Speed Electric Drives in Discrete Time Domain for Mild-Hybrid Turboprop Aircraft Applications. IEEE Trans. Transp. Electrif. 2022, 1. [Google Scholar] [CrossRef]
- Yang, Y.; Song, W.; Ren, H. Encoderless Model Predictive Torque Control of DTP-PMSM with Sliding Mode Speed Observer. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Jinan, China, 20–22 November 2021; pp. 202–206. [Google Scholar] [CrossRef]
- Fan, L.; Yang, T.; Chen, Y.; Bozhko, S. Comparative Study of Sensorless Methods Based on Sliding Mode Observer for Dual Three-Phase Permanent Magnet Synchronous Machine. In Proceedings of the 10th International Conference on Power Electronics, Machines and Drives (PEMD 2020), Online, 15–17 December 2020; pp. 850–854. [Google Scholar] [CrossRef]
- Yu, H.; Gan, C.; Wang, H.; Chen, Y.; Ni, K.; Qu, R. Speed Adaptative Sensorless Control Method of a High-speed Dual Three-phase Permanent Magnet Synchronous Motor. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 155–160. [Google Scholar] [CrossRef]
- Fan, L.; Yang, T.; Rashed, M.; Bozhko, S. Comparative Study Of Back EMF Based Sensorless Control Methods For Dual Three-Phase PMSM. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles and International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Barcaro, M.; Faggion, A.; Bianchi, N.; Bolognani, S. Sensorless Rotor Position Detection Capability of a Dual Three-Phase Fractional-Slot IPM Machine. IEEE Trans. Ind. Appl. 2012, 48, 2068–2078. [Google Scholar] [CrossRef]
- Barcaro, M.; Faggion, A.; Bianchi, N.; Bolognani, S. Predicted and experimental anisotropy of a dual three-phase interior permanent magnet motor for sensorless rotor position control. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Zhu, Z.Q.; Xu, P.L. Improved Pulsating Signal Injection Using Zero-Sequence Carrier Voltage for Sensorless Control of Dual Three-Phase PMSM. IEEE Trans. Energy Convers. 2017, 32, 436–446. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Zhu, Z.Q.; Xu, P. Improved Rotor Position Estimation Accuracy by Rotating Carrier Signal Injection Utilizing Zero-Sequence Carrier Voltage for Dual Three-Phase PMSM. IEEE Trans. Ind. Electron. 2017, 64, 4454–4462. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, J.Y.; Gu, Z.Y.; Sun, H.Y.; Zhu, Z.Q. Torque Improvement of Dual Three-Phase Permanent Magnet Machine Using Zero Sequence Components. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Roetzer, M.; Vollmer, U.; Chen, L.; Kennel, R. Anisotropy-based position estimation approach for symmetrical dual three-phase permanent magnet synchronous machines. In Proceedings of the 2017 IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 157–164. [Google Scholar] [CrossRef]
- Ribeiro, L.; Degner, M.; Briz, F.; Lorenz, R. Comparison of carrier signal voltage and current injection for the estimation of flux angle or rotor position. In Proceedings of the Conference Record of 1998 IEEE Industry Applications Conference. Thirty-Third IAS Annual Meeting (Cat. No.98CH36242), St. Louis, MO, USA, 12–15 October 1998; Volume 1, pp. 452–459. [Google Scholar] [CrossRef]
- Yu, K.; Wang, Z. An Online Compensation Method of VSI Nonlinearity for Dual Three-Phase PMSM Drives Using Current Injection. IEEE Trans. Power Electron. 2022, 37, 3769–3774. [Google Scholar] [CrossRef]
- Li, Z.; Feng, G.; Lai, C.; Banerjee, D.; Li, W.; Kar, N.C. Current Injection-Based Multi-parameter Estimation for Dual Three-Phase IPMSM Considering VSI Nonlinearity. IEEE Trans. Transp. Electrif. 2019, 5, 405–415. [Google Scholar] [CrossRef]
- Bin, X.; Luo, X.; Zhu, L.; Zhao, J. Sensorless Control of Dual Three-Phase PMSM with High Frequency Voltage Signal Injection. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Kim, S.; Ha, J.I.; Sul, S.K. PWM Switching Frequency Signal Injection Sensorless Method in IPMSM. IEEE Trans. Ind. Appl. 2012, 48, 1576–1587. [Google Scholar] [CrossRef]
- Hwang, C.E.; Lee, Y.; Sul, S.K. Analysis on Position Estimation Error in Position-Sensorless Operation of IPMSM Using Pulsating Square Wave Signal Injection. IEEE Trans. Ind. Appl. 2019, 55, 458–470. [Google Scholar] [CrossRef]
- Lee, Y.R.; Yoo, J.; Sul, S.K. Switching Frequency Signal-Injection Sensorless Control Robust to Non-Ideal Characteristics of Inverter System for Dual Three-Phase PMSM. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 4761–4768. [Google Scholar] [CrossRef]
- Chen, H.; Gao, Q.; Zhu, H. Low and zero speed sensorless control of dual three-phase permanent magnet synchronous machines using the fundamental PWM excitation. In Proceedings of the 10th International Conference on Power Electronics, Machines and Drives (PEMD 2020), Online, 15–17 December 2020; Volume 2020, pp. 152–157. [Google Scholar] [CrossRef]
- Liu, T.; Zhu, Z.Q.; Wu, X.; Wu, Z.; Stone, D.A.; Foster, M.P. A Position Error Correction Method for Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Appl. 2022, 58, 3589–3601. [Google Scholar] [CrossRef]
- Liu, T.; Zhu, Z.; Wu, X.; Wu, Z.; Stone, D.; Foster, M. A Position Error Correction Method for Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines. In Proceedings of the 2021 IEEE International Electric Machines and Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Furmanik, M.; Scelba, G.; Rafajdus, P. Fault-Tolerant Sensorless Control for Six-Phase PMSM with Dual Back-EMF Observer. In Proceedings of the 2022 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 22–24 June 2022; pp. 305–311. [Google Scholar] [CrossRef]
- Fang, H.; Xu, J.; Du, Y. A Novel High Frequency Signal Injection Based Sensorless Control Method for Six-Phase FTPMSM System. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, J.; Fang, H.; Liang, Z.; Zhang, B.; Guo, H. Sensorless Fault-Tolerant Control via High-Frequency Signal Injection for Aerospace FTPMSM Drives With Phase Open- and Short-Circuit Faults. IEEE Trans. Transp. Electrif. 2022, 8, 3401–3410. [Google Scholar] [CrossRef]
- Qiu, X.; Ji, J.; Zhou, D.; Zhao, W.; Chen, Y.; Huang, L. A Modified Flux Observer for Sensorless Direct Torque Control of Dual Three-Phase PMSM Considering Open-Circuit Fault. IEEE Trans. Power Electron. 2022, 37, 15356–15369. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantages | Disadvantages |
|---|---|---|
| VSD |
|
|
| MITP |
|
|
| Types | EKF | MRAS | SMO | Luenberger |
|---|---|---|---|---|
| Advantages | Less influence of noise; low computational time | A fail-safe machine model; high-velocity adaptation | Guaranteeing no mistakes; very reliable; independent of motor parameters | Convergence is certain all across a large chunk of the possible states; convergence times are completely arbitrary |
| Disadvantages | Weak low-speed performance | Struggle with a wide range of motor characteristics | Ineffective at rest and at slow speeds | Can make the sensor noise issue much worse |
| Types | Voltage Injection | Current Injection | Pulsating Signal Injection | Fumdamental PWM Excitiation |
|---|---|---|---|---|
| Advantages | No acoustic noise; independent of motor parameter | High performance; independent of motor parameter | Small effect on inverter nonlinierities; magnetude modulated | Insensetive to parameter variation |
| Disadvatage | Do not support high speed operation | High computational requirement, which needs powerful hardware devices | Requiring initial position information | High current ripple; flux distortion causes estimation error |
| Power level | Techniques | Application | Reference |
|---|---|---|---|
| 50 W | Saliency-based (Signal Injection) | Aerospaces | [57] |
| 170 W | Model-based (EKF) | High power and high current | [28] |
| 170 W | Model-based (EKF) | Industrial applications | [28] |
| 170 W | Saliency-based (Signal Injection) | High power and high current | [41] |
| 170 W | Saliency-based (Voltage injection) | High power and high current | [42] |
| 230 W | Model-based (EKF) | Power applications, high speed | [27,29] |
| 230 W | Saliency-based (Signal Injection) | Power applications | [45] |
| 500 W | Saliency-based (Signal Injection) | Low speed applications | [48] |
| 1 kW | Model-based (Luenberger) | Electric vehicles | [55] |
| 2.3 kW | Back EMF | Industrial applications | [9] |
| 3 kW | Model-based (MRAS) | Industrial applications | [32] |
| 3.7 kW | Combination method | Power applications | [25] |
| 4.2 kW | Model-based (Luenberger) | Small and medium machines | [26] |
| 4.5 kW | Saliency-based (Current Injection) | Special applications in aircraft drives, Automotive tractions, and electric ship propulsions | [47] |
| 5 kW | Saliency-based (FPE) | Low- and zero-speeds applications | [19] |
| 5.5 kW | Model-based (SMO) | Military applications | [35] |
| 6.7 kW | Model-based (Back EMF) | High-speed applications | [58] |
| 20 kW | Model-based (MRAS) | Aircraft and high-speed applications | [33] |
| 240 W | Current control | High-power industrial applications | [23] |
| 200 W | Model-based | Electric vehicles | [24] |
| Undefined | Signal injection | Industrial applications | [39] |
| Undefined | Saliency-based (FPE) | Low speed applications | [52] |
| Undefined | Combination method | High-power applications | [53,54] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teymoori, V.; Kamper, M.; Wang, R.-J.; Kennel, R. Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines—A Review. Energies 2023, 16, 1326. https://doi.org/10.3390/en16031326
Teymoori V, Kamper M, Wang R-J, Kennel R. Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines—A Review. Energies. 2023; 16(3):1326. https://doi.org/10.3390/en16031326
Chicago/Turabian StyleTeymoori, Vahid, Maarten Kamper, Rong-Jie Wang, and Ralph Kennel. 2023. "Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines—A Review" Energies 16, no. 3: 1326. https://doi.org/10.3390/en16031326
APA StyleTeymoori, V., Kamper, M., Wang, R.-J., & Kennel, R. (2023). Sensorless Control of Dual Three-Phase Permanent Magnet Synchronous Machines—A Review. Energies, 16(3), 1326. https://doi.org/10.3390/en16031326