

Development of an Optimal Port Crane Trajectory for Reduced Energy Consumption †

Abstract
:1. Introduction
2. Port Crane System Modeling
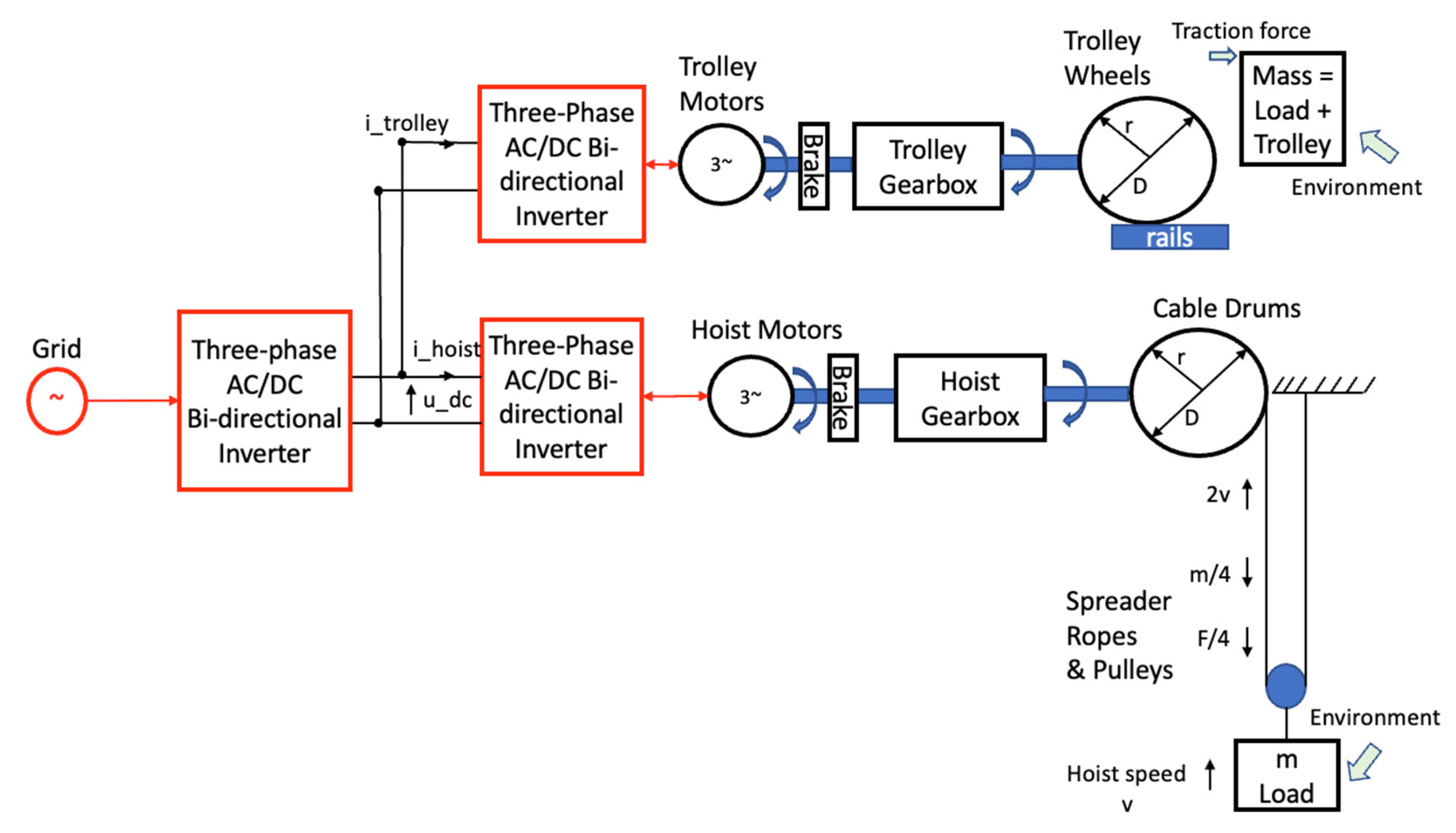
2.1. Port Crane Electromechanical System Description
2.2. Port Crane Energetic Macroscopic Representation
2.3. Port Crane Mathematical Modelling
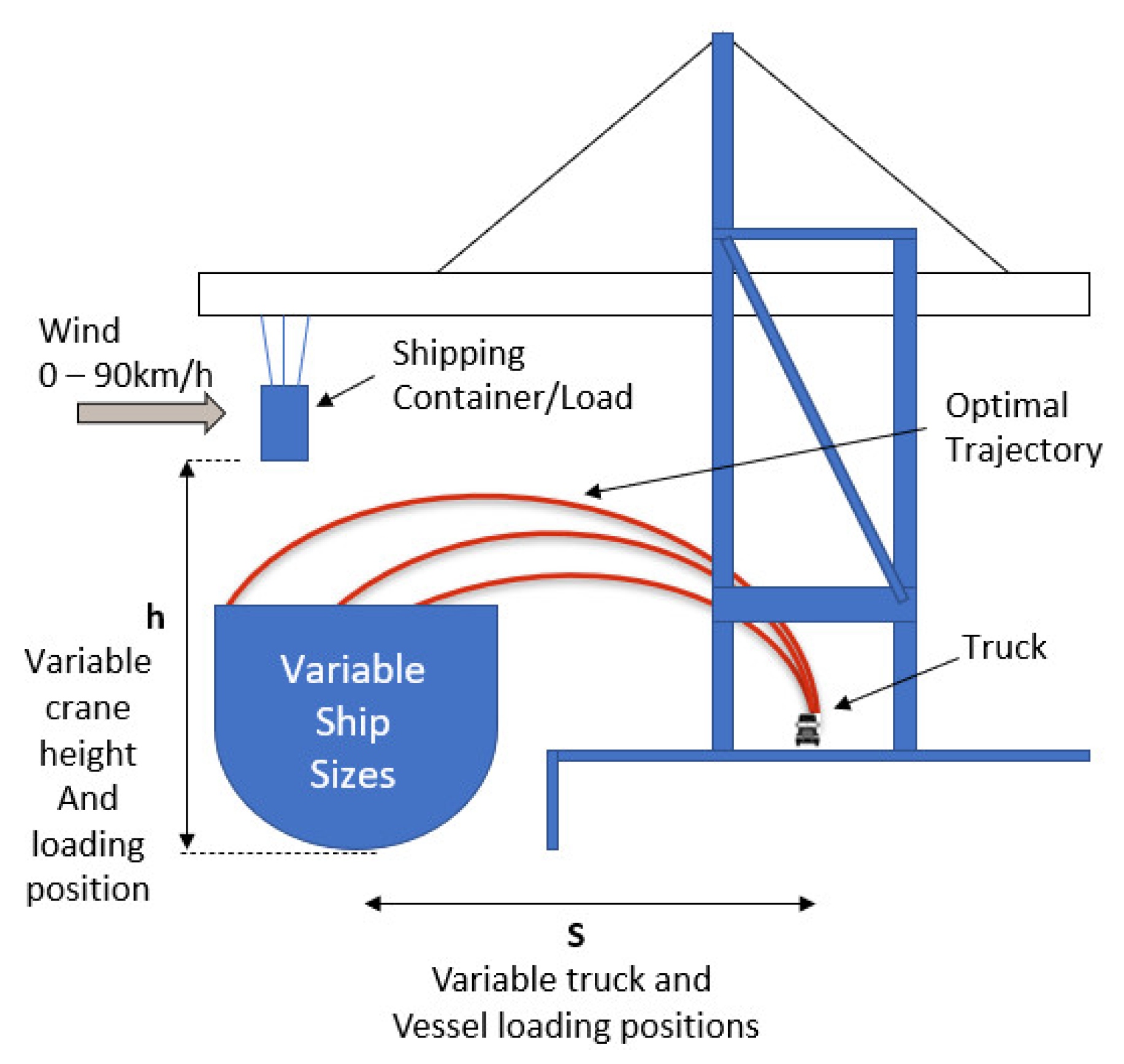
2.4. System Disturbances
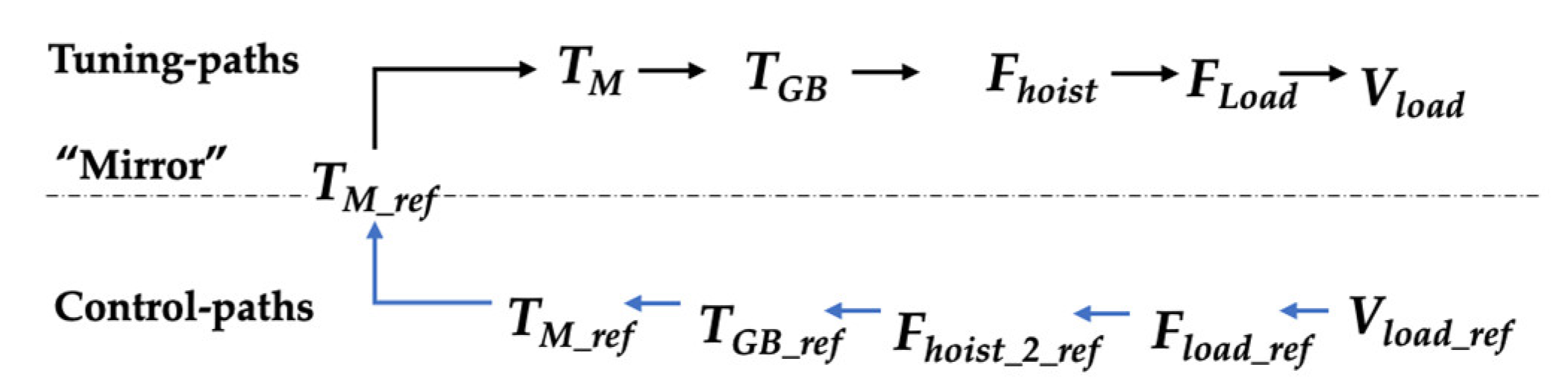
2.5. Port Crane Local Control System
3. Development of the Optimal Port Crane Trajectory
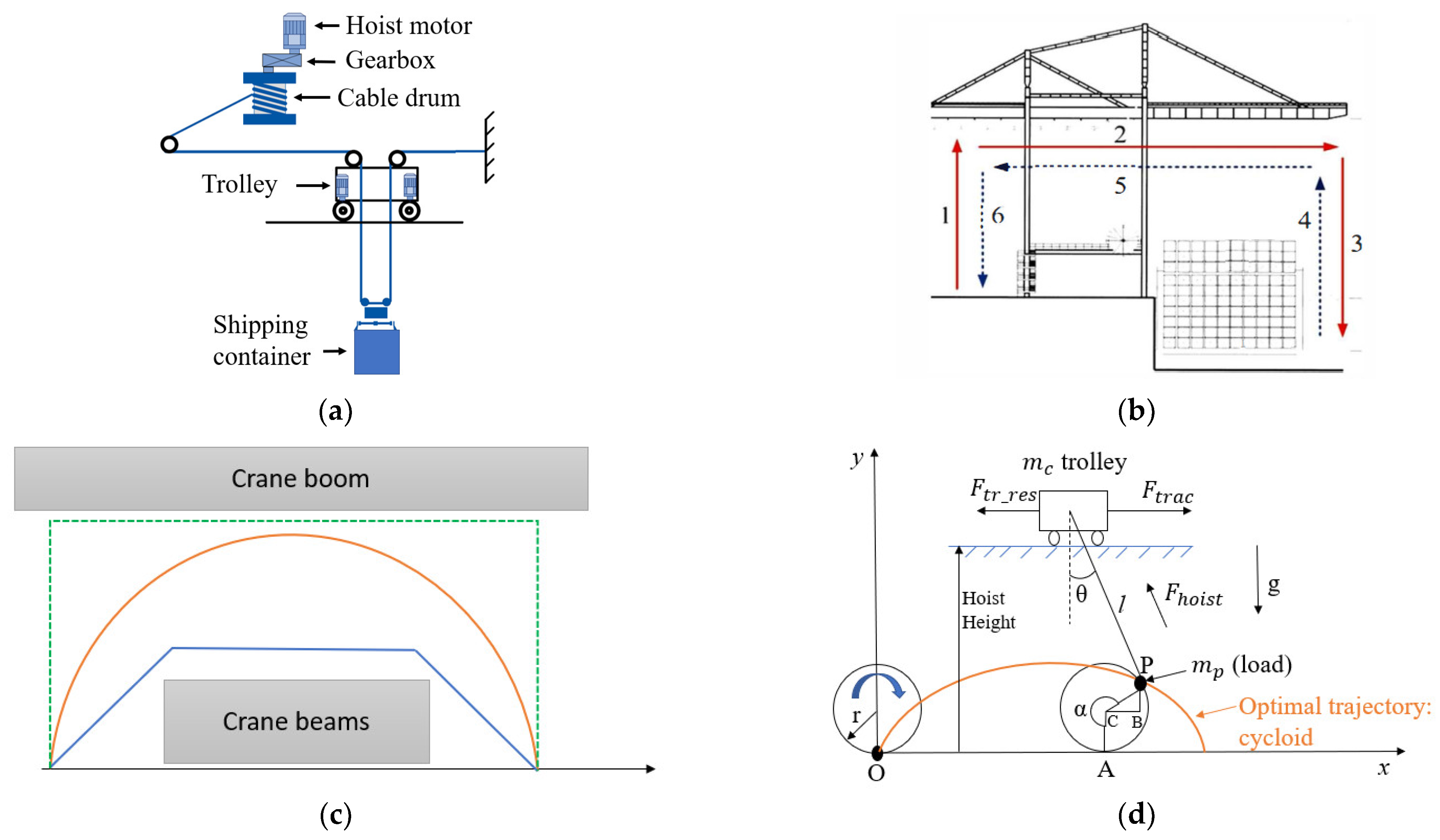
3.1. Description of the Port Crane Load-Handling Mechanism
3.2. Optimal Port Crane Trajectory
3.3. Port Crane Optimal Power Consumption
| Algorithm 1. PSO pseudo-code. |
| Initialize , , Initialize the PSO hyper-parameters (N, c1, c2, Wmin, Wmax, Vmax, and MaxIter) Initialize the population of N particles do for each particle calculate the objective or fitness of the particle using Equation (52) Update PBEST if required Update GBEST if required end for Update the inertia weight for each particle Update the velocity (V) Update the position (X) end for while the end condition is not satisfied Return GBEST as the best estimation of the global optimum |
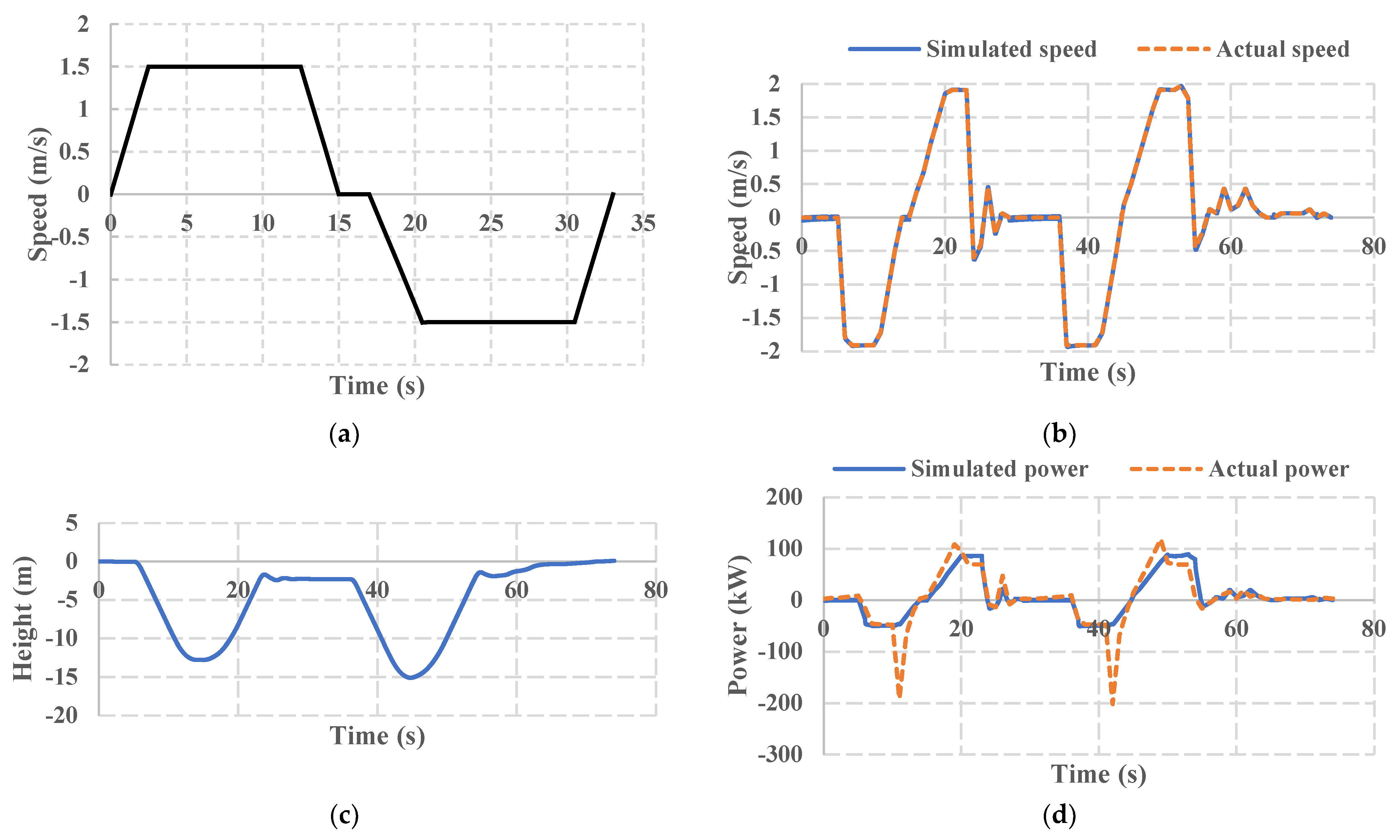
4. Experimental Validation
4.1. Experimental Setup
4.2. Experimental Results
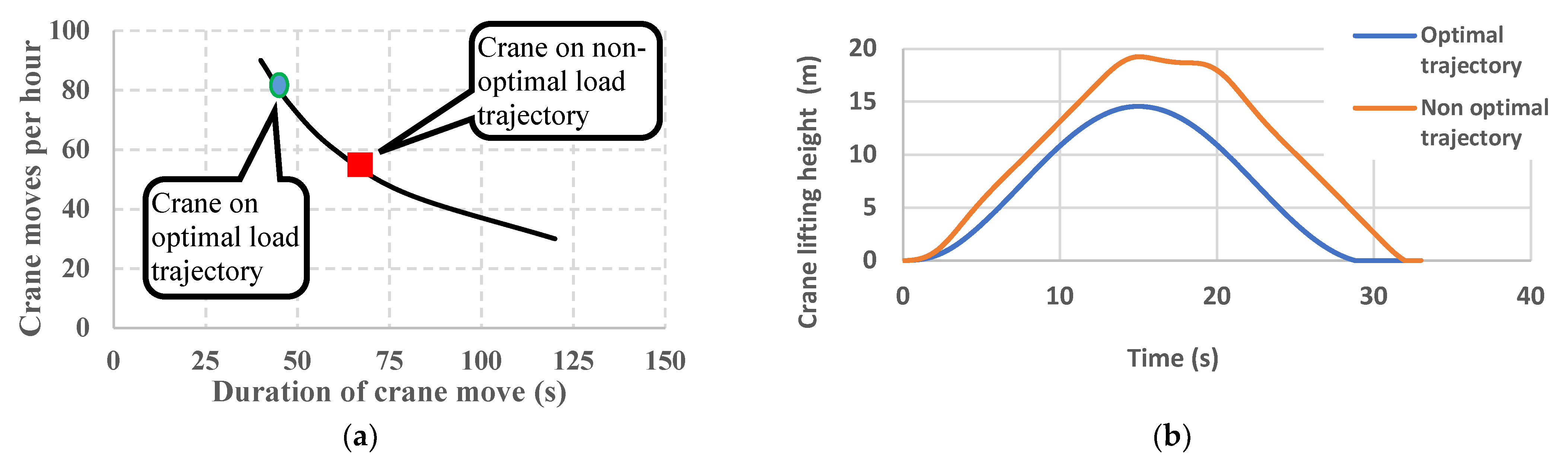
5. Optimal vs. Nonoptimal Trajectory
6. Simulation Results
7. Conclusions
- The developed optimal crane load trajectory is 38.59% faster and more productive than the nonoptimal crane load trajectory;
- The optimal trajectory reduces the cranes’ peak power consumption by 36.38% when compared with the nonoptimal trajectory;
- The optimal trajectory reduces the cranes’ energy consumption by 36.40% and 12% when compared with the nonoptimal and experienced crane driver trajectories, respectively;
- The sinusoidal speed reference curves produced by the cycloid trajectory can be used as a guide for the automated port crane system;
- The outcome of this work will also serve as a guideline for port crane designers in the selection of port cranes based on the required energy consumption, maximum wind speed capability, crane lifting height, and trolley distance between ship and shore.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Variables | |
| Shipping container frontal area (m2). | |
| Air density coefficient. | |
| Trolley wheels rolling resistance coefficient. | |
| Total environmental resistance force (N). | |
| Crane hoisting force (N). | |
| Trolley traction force (N). | |
| Gravitational acceleration (m/s2). | |
| Hoist drive current (A). | |
| Grid current (A). | |
| Traction system current (A). | |
| Trolley drive current (A). | |
| Hoist gearbox ratio. | |
| Trolley gearbox ratio. | |
| Mass of crane load (kg). | |
| Mass of crane load and trolley (kg). | |
| Cable drum radius (m). | |
| Trolley wheels radius (m). | |
| Hoist drive torque (N.m). | |
| Trolley drive torque (N.m). | |
| Gearbox torque (N.m). | |
| Crane load hoisting velocity (m/s). | |
| Crane trolley velocity (m/s). | |
| Wind speed (m/s). | |
| Hoist drive efficiency. | |
| Trolley drive efficiency. | |
| Hoist gearbox efficiency. | |
| Trolley gearbox efficiency. | |
| Hoist drive shaft rotational speed (rad/s). | |
| Trolley drive shaft rotational speed (rad/s). | |
| Cable drum rotational speed (rad/s). | |
| Trolley wheels’ rotational speed (rad/s). | |
| Air density at sea level (kg/m3). | |
| Subscripts | |
| _ref | Reference. |
References
- Song, D. A Literature Review, Container Shipping Supply Chain: Planning Problems and Research Opportunities. Logistics 2021, 5, 41. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. A Review of Energy Efficiency in Ports: Operational Strategies, Technologies and Energy Management Systems. Renew. Sustain. Energy Rev. 2019, 112, 170–182. [Google Scholar] [CrossRef]
- Zhao, N.; Schofield, N.; Niu, W. Energy Storage System for a Port Crane Hybrid Power-Train. IEEE Trans. Transp. Electrif. 2016, 2, 480–492. [Google Scholar] [CrossRef]
- Corral-Vega, P.J.; García-Trivi, P.; Fern Andez-Ramírez, L.M. Design, Modelling, Control and Techno-Economic Evaluation of a Fuel Cell/Supercapacitors Powered Container Crane. Energy 2019, 186, 115863. [Google Scholar] [CrossRef]
- Nguyễn, B.H.; Vo-Duy, T.; Henggeler Antunes, C.; Trovão, J.P.F. Multi-Objective Benchmark for Energy Management of Dual-Source Electric Vehicles: An Optimal Control Approach. Energy 2021, 223, 119857. [Google Scholar] [CrossRef]
- Nguyen, B. Energy Management Strategies of Electric and Hybrid Vehicles Supplied by Hybrid Energy Storage Systems. Ph.D. Thesis, Faculté de Génie, Université de Sherbrooke, Sherbrooke, QC, Canada, 2019. [Google Scholar]
- Nguyen, B.H.; German, R.; Trovao, J.P.F.; Bouscayrol, A. Real-Time Energy Management of Battery/Supercapacitor Electric Vehicles Based on an Adaptation of Pontryagin’s Minimum Principle. IEEE Trans. Veh. Technol. 2019, 68, 203–212. [Google Scholar] [CrossRef]
- Zhao, N. Modelling and Design of Electric Machines and Associated Components for More Electric Vehicles. Ph.D. Thesis, School of Graduate Studies, McMaster University, Hamilton, ON, Canada, 2017. [Google Scholar]
- Zhou, W.; Cleaver, C.J.; Dunant, C.F.; Allwood, J.M.; Lin, J. Cost, Range Anxiety and Future Electricity Supply: A Review of How Today’s Technology Trends May Influence the Future Uptake of BEVs. Renew. Sustain. Energy Rev. 2023, 173, 113074. [Google Scholar] [CrossRef]
- Kim, S.M.; Sul, S.K. Control of Rubber Tyred Gantry Crane with Energy Storage Based on Supercapacitor Bank. IEEE Trans. Power Electron. 2006, 21, 1420–1427. [Google Scholar] [CrossRef]
- Yin, J.; Peng, X.; He, J.; Huo, Q.; Wei, T. Energy Management Method of a Hybrid Energy Storage System Combined with the Transportation-Electricity Coupling Characteristics of Ports. IEEE Trans. Intell. Transp. Syst. 2023, 1–16. [Google Scholar] [CrossRef]
- Kermani, M.; Parise, G.; Martirano, L.; Parise, L.; Chavdarian, B. Utilization of Regenerative Energy by Ultracapacitor Sizing for Peak Shaving in STS Crane. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe, EEEIC/I and CPS Europe 2019, Genova, Italy, 11–14 June 2019. [Google Scholar]
- Parise, G.; Honorati, A.; Parise, L.; Martirano, L. Near Zero Energy Load Systems: The Special Case of Port Cranes. In Proceedings of the 2015 IEEE/IAS 51st Industrial and Commercial Power Systems Technical Conference, I and CPS 2015, Calgary, AB, Canada, 5–8 May 2015. [Google Scholar]
- Vichos, E.; Sifakis, N.; Tsoutsos, T. Challenges of Integrating Hydrogen Energy Storage Systems into Nearly Zero-Energy Ports. Energy 2022, 241, 122878. [Google Scholar] [CrossRef]
- Kermani, M.; Parise, G.; Martirano, L.; Parise, L.; Chavdarian, B. Power Balancing in STS Group Cranes with Flywheel Energy Storage Based on DSM Strategy. In Proceedings of the 2018 IEEE 59th Annual International Scientific Conference on Power and Electrical Engineering of Riga Technical University, RTUCON 2018, Riga, Latvia, 12–13 November 2018. [Google Scholar]
- Takalani, R.; Masisi, L. Development of An Energy Management Strategy for Port Cranes. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Toronto, ON, Canada, 13–16 October 2021. [Google Scholar]
- Wu, Z.; Xia, X. Optimal Motion Planning for Overhead Cranes. IET Control Theory Appl. 2014, 8, 1833–1842. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Dong, X.; Peng, H.; Li, C. An Energy-Time Optimal Autonomous Motion Control Framework for Overhead Cranes in the Presence of Obstacles. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 235, 2373–2385. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, H.; Chen, H.; Liu, W. A Time Optimal Trajectory Planning Method for Double-Pendulum Crane Systems with Obstacle Avoidance. IEEE Access 2021, 9, 13022–13030. [Google Scholar] [CrossRef]
- Zrnić, N.; Petković, Z.; Bošnjak, S. Automation of Ship-to-Shore Container Cranes: A Review of State-of-the-Art. FME Trans. 2005, 33, 111–121. [Google Scholar]
- Böck, M.; Stöger, A.; Kugi, A. Efficient Generation of Fast Trajectories for Gantry Cranes with Constraints. IFAC PapersOnLine 2017, 50, 1937–1943. [Google Scholar] [CrossRef]
- Masih-Tehrani, M.; Ha’iri-Yazdi, M.; Esfahanian, V.; Safae, A. Optimum Sizing and Optimum Energy Management of a Hybrid Energy Storage System for Lithium Battery Life Improvement. J. Power Sources 2013, 244, 2–10. [Google Scholar] [CrossRef]
- Nguyen, B.H.; Vo-Duy, T.; Ta, M.C.; Trovao, J.P.F. Optimal Energy Management of Hybrid Storage Systems Using an Alternative Approach of Pontryagin’s Minimum Principle. IEEE Trans. Transp. Electrif. 2021, 7, 2224–2237. [Google Scholar] [CrossRef]
- Sun, X.; Fu, J.; Yang, H.; Xie, M.; Liu, J. An Energy Management Strategy for Plug-in Hybrid Electric Vehicles Based on Deep Learning and Improved Model Predictive Control. Energy 2023, 269, 126772. [Google Scholar] [CrossRef]
- Bouscayrol, A.; Davat, B.; De Fornel, B.; Francois, B.; Hautier, J.P.; Meibody-Tabar, F.; Pietrzak-David, M. Multi-Converter Multi-Machine Systems: Application for Electromechanical Drives. Eur. Phys. J. Appl. Phys. 2020, 10, 131–147. [Google Scholar] [CrossRef]
- Bouscayrol, A.; Hautier, J.P.; Lemaire-Semail, B. Graphic Formalisms for the Control of Multi-Physical Energetic Systems: COG and EMR. In Systemic Design Methodologies for Electrical Energy Systems: Analysis, Synthesis and Management; John Wiley and Sons: Hoboken, NJ, USA, 2013; pp. 89–124. ISBN 9781848213883. [Google Scholar]
- Castaings, A.; Lhomme, W.; Trigui, R.; Bouscayrol, A. Comparison of Energy Management Strategies of a Battery/Supercapacitors System for Electric Vehicle under Real-Time Constraints. Appl. Energy 2016, 163, 190–200. [Google Scholar] [CrossRef]
- Nguyên, B.H.; Trovão, J.P.; German, R.; Bouscayrol, A. An Optimal Control-Based Strategy for Energy Management of Electric Vehicles Using Battery/Supercapacitor. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference, VPPC, Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar]
- Lhomme, W.; Bouscayrol, A.; Syed, S.A.; Roy, S.; Gailly, F.; Pape, O. Energy Savings of a Hybrid Truck Using a Ravigneaux Gear Train. IEEE Trans. Veh. Technol. 2017, 66, 8682–8692. [Google Scholar] [CrossRef]
- Boyer, C.; Merzbach, U. A History of Mathematics; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Perlick, V. The Brachistochrone Problem in a Stationary Space-time. J. Math. Phys. 1991, 32, 3148–3157. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Zhang, Y.; Ma, B. A Novel Kinematic Coupling-Based Trajectory Planning Method for Overhead Cranes. IEEE/ASME Trans. Mechatron. 2012, 17, 166–173. [Google Scholar] [CrossRef]
- Ashby, N.; Brittin, W.E.; Love, W.F.; Wyss, W. Brachistochrone with Coulomb Friction. Am. J. Phys. 1975, 43, 902–906. [Google Scholar] [CrossRef]
- Pedrycz, W.; Sillitti, A.; Succi, G. Computational Intelligence: An Introduction. Stud. Comput. Intell. 2016, 617, 13–31. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle Swarm Optimization: An Overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- The World Bank. Transport Global Practice: The Container Port Performance Index 2021: A Comparable Assessment of Container Port Performance; The World Bank: Washington, DC, USA, 2021. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hoist System Parameters | |
| Load mass | 65 t with shipping container |
| 18 t empty spreader | |
| Hoisting Speed | 1.5 m/s full-load speed |
| 3 m/s no-load speed | |
| Electric drive | 2 × 500 kW induction machines |
| Efficiency 90% | |
| Gearbox | Ratio 21.389 |
| Efficiency 85% | |
| Cable drum diameter | 1.365 m |
| Trolley System Parameters | |
| Trolley Speed | 3.83 m/s-maximum |
| Electric drive | 4 × 55 kW induction machines |
| Efficiency 90% | |
| Gearbox | Ratio 21.389 |
| Efficiency 85% | |
| Trolley wheels diameter | 710 mm |
| Coefficient of friction rail-to-wheel | 0.02 |
| Hoist System Modeling | ||
|---|---|---|
| Electrical Drive | (1) | |
| (2) | ||
| (3) | ||
| Gearbox | (4) | |
| (5) | ||
| Cable drum | (6) | |
| (7) | ||
| Spreader System | (8) | |
| (9) | ||
| Load | (10) | |
| (11) | ||
| Environment | (12) | |
| Trolley System Modeling | ||
| Electrical Drive | (13) | |
| Gearbox | (14) | |
| (15) | ||
| Trolley Wheels | (16) | |
| (17) | ||
| Load | (18) | |
| Environment | (19) |
| Hoist Local Control System | ||
| Gearbox | (20) | |
| Cable drum | (21) | |
| Spreader | (22) | |
| Load | (23) | |
| Trolley Local Control System | ||
| Gearbox | (24) | |
| Wheel | (25) | |
| Load | (26) |
| Ship-to-Shore Distance (m) | Min. | Avg. | Max. |
|---|---|---|---|
| 20 | 50 | 100 | |
| Cycloid radius, i.e., half crane lifting height (m) | 3.2 | 8.0 | 15.9 |
| Actual crane moving time (s) | 9.8 | 15.5 | 21.9 |
| Dwell time (s) | 30 | 30 | 30 |
| Total duration of crane move (s) | 39.8 | 45.5 | 51.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takalani, R.L.E.; Masisi, L. Development of an Optimal Port Crane Trajectory for Reduced Energy Consumption. Energies 2023, 16, 7172. https://doi.org/10.3390/en16207172
Takalani RLE, Masisi L. Development of an Optimal Port Crane Trajectory for Reduced Energy Consumption. Energies. 2023; 16(20):7172. https://doi.org/10.3390/en16207172
Chicago/Turabian StyleTakalani, Rofhiwa Lutendo Edward, and Lesedi Masisi. 2023. "Development of an Optimal Port Crane Trajectory for Reduced Energy Consumption" Energies 16, no. 20: 7172. https://doi.org/10.3390/en16207172
APA StyleTakalani, R. L. E., & Masisi, L. (2023). Development of an Optimal Port Crane Trajectory for Reduced Energy Consumption. Energies, 16(20), 7172. https://doi.org/10.3390/en16207172