
A Novel Allocation Strategy Based on the Model Predictive Control of Primary Frequency Regulation Power for Multiple Distributed Energy Storage Aggregators

 ,
,
Abstract
:1. Introduction
- (1)
- An MPC-based PFR power allocation model with multiple DES aggregators was established that incorporates the predictive model and receding horizon optimization model. The predictive model of DES aggregators was developed by considering both the dynamic equation of the active power output increment for DESs and the transfer equation of the battery SOC. Based on the predictive model, the receding horizon optimization model was subsequently developed to minimize the FR cost of DESs while satisfying all of the constraints of DESs.
- (2)
- The DIPM was applied to solve the PFR power allocation model in a distributed manner, which can ensure the speed and accuracy of the solution while simultaneously protecting the private information of each aggregator. Unlike the distributed algorithms adopted in [21,22,23,24,25], the DIPM has a second-order convergence speed.
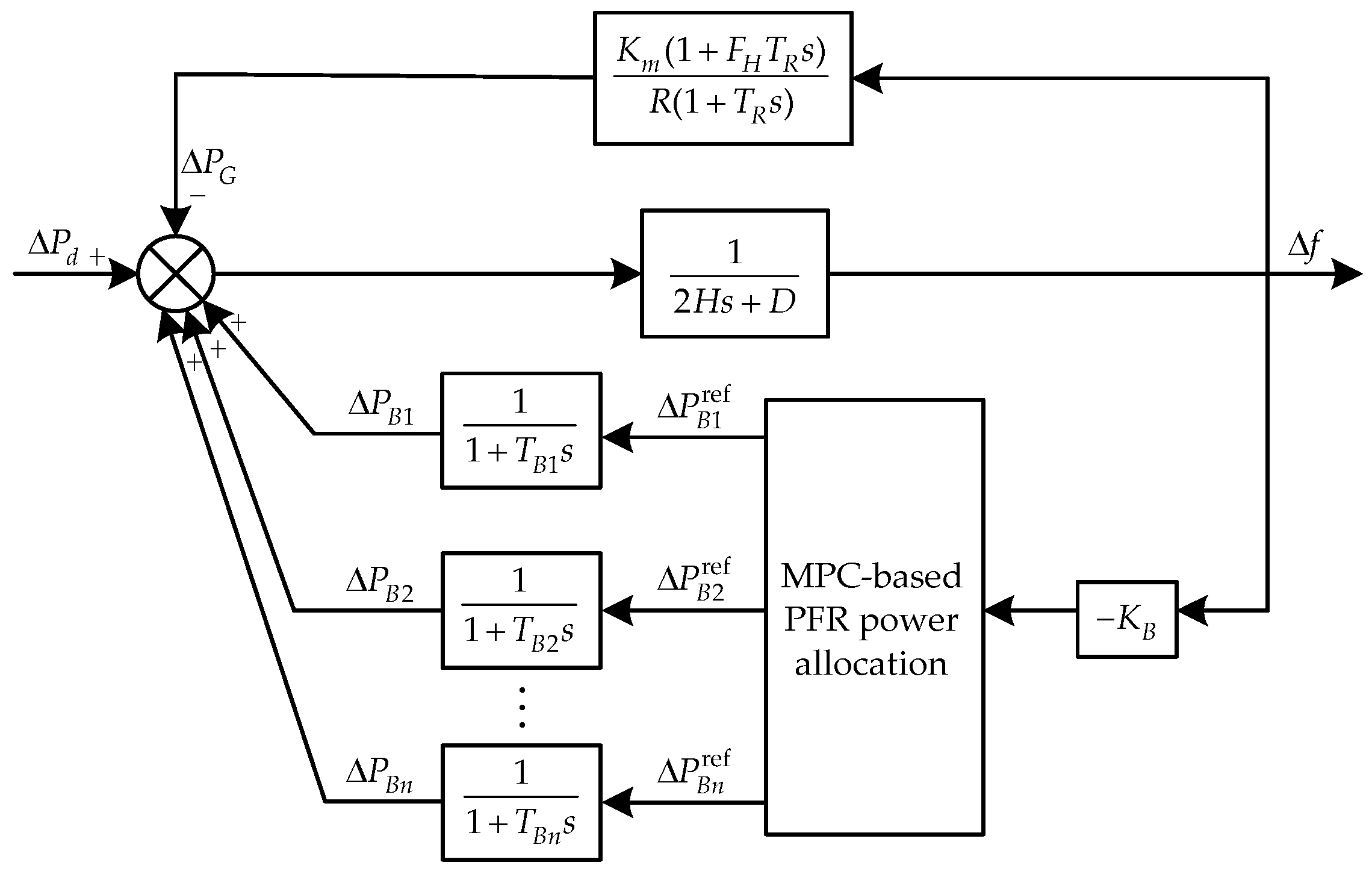
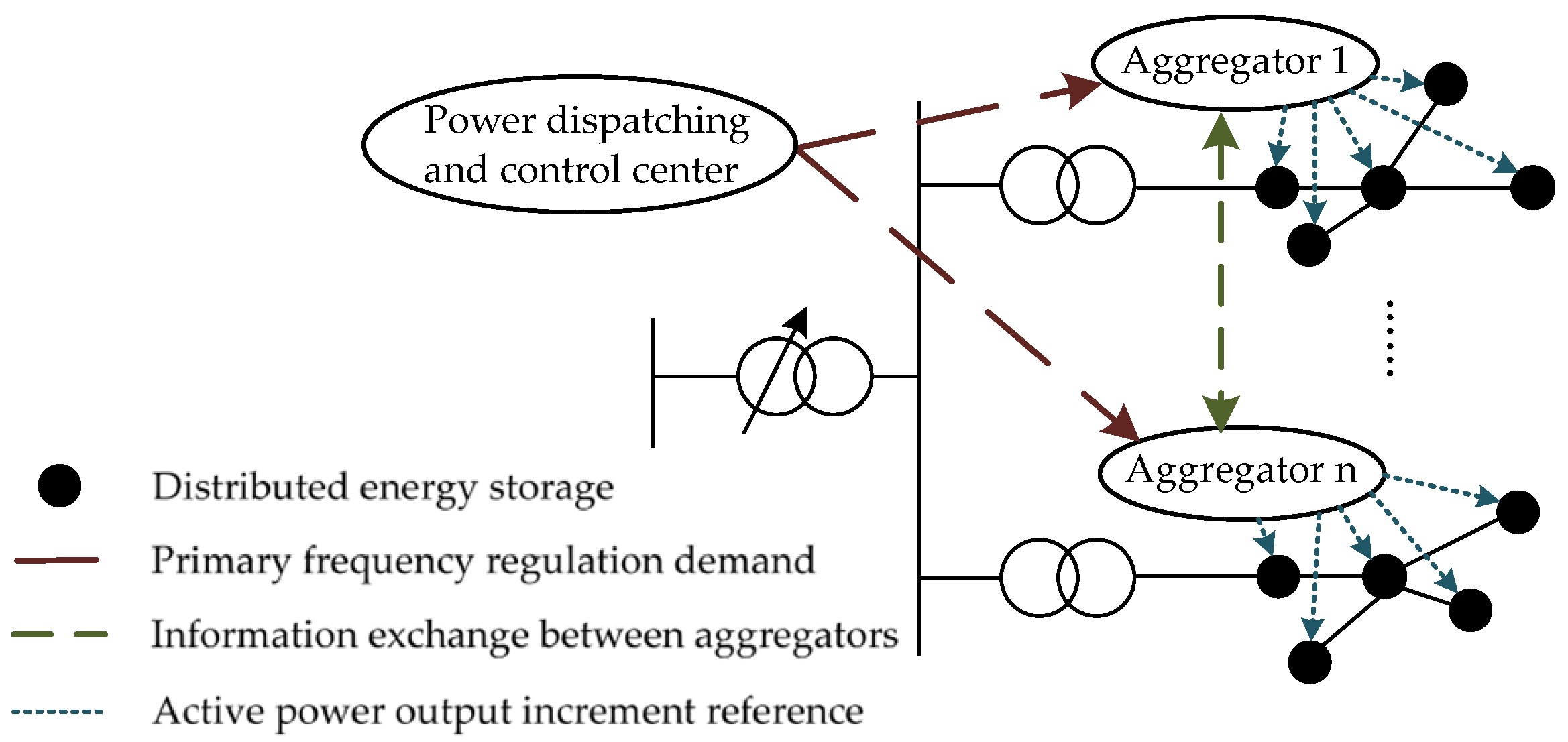
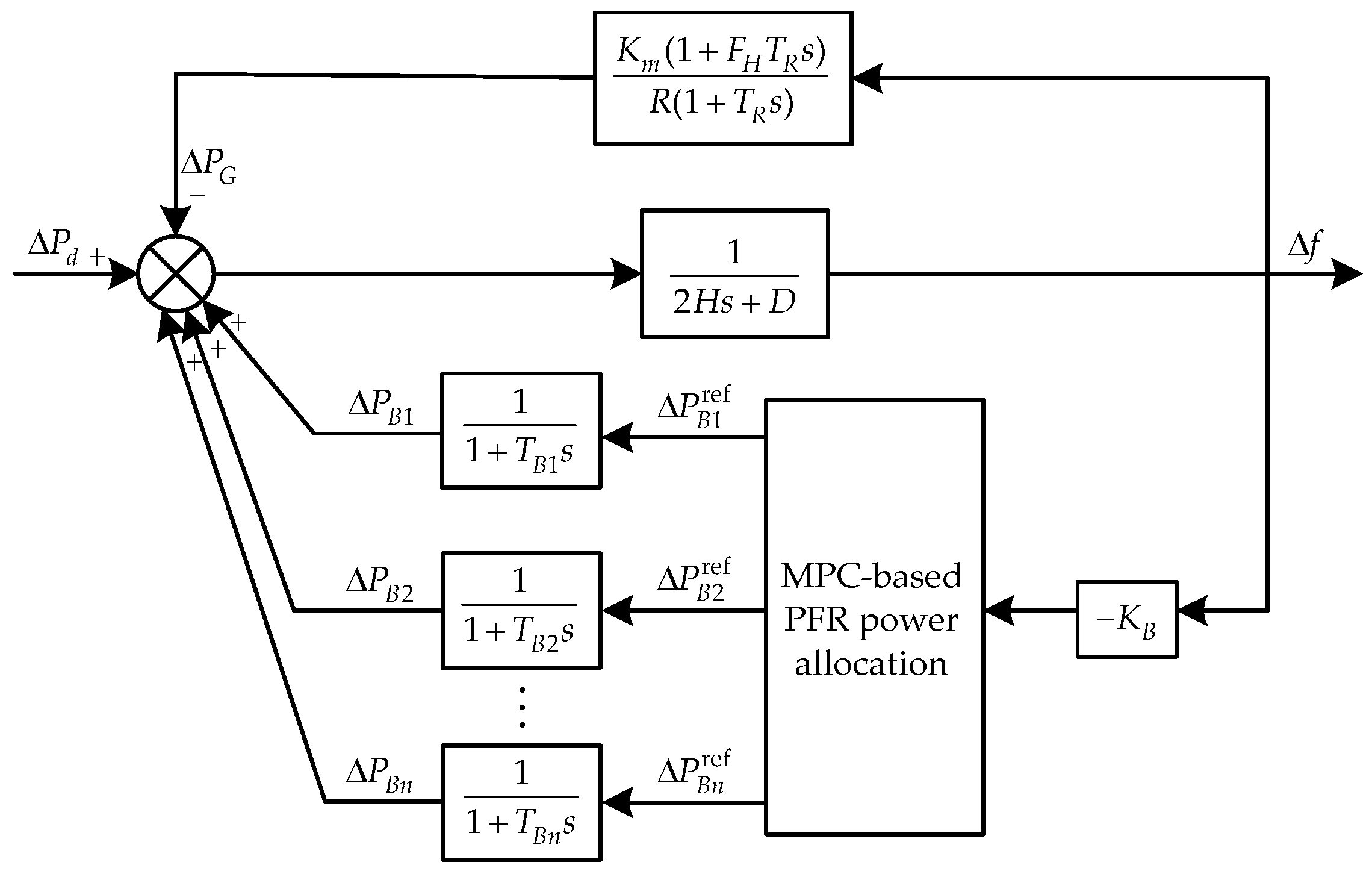
2. Calculation of the PFR Demand
3. Primary Frequency Regulation Power Allocation Model
3.1. Predictive Model of Aggregators
3.2. Receding Horizon Optimization Model
- (1)
- Objective
- (2)
- Constraints
4. Distributed Solution of PFR Power Allocation Model
4.1. Construction of the Unconstrained QP Model
- (1)
- Construction of the Lagrange function
- (2)
- Derivation for the Karush–Kuhn–Tucker (KKT) optimality conditions
- (3)
- Derivation of the correction equation
- (4)
- Derivation of the unconstrained QP model
4.2. Approach for Solving the Unconstrained QP Model
- (1)
- The construction of QP models expressed in the coupling variables’ increments
- (2)
- Solving for the coupling variables’ increments
- (3)
- Updating the primal and dual variables
| Step 0: | Give k = 0; set tolerance ε = 10−4; for aggregator a, initialize its primal variables xa(k) and ma(k) and dual variables ya(k) and za(k). |
| Step 1: | Calculate complementary gap Gapa(k) for each aggregator and obtain the maximum complementary gap Gapmax(k) by communicating with other aggregators. If Gapmax(k) < ε, then output the optimal solution and stop. |
| Step 2: | Each aggregator calculates and in Equation (45) independently and obtain the aggregated unconstrained QP model (46) by communicating with other aggregators. |
| Step 3: | Each aggregator solves Equation (46) independently to obtain Δxa(C)(k) and subsequently computes Δxa(I)(k), Δya(k), Δma(k), and Δza(k). |
| Step 4: | Update xa(k + 1), ya(k + 1), ma(k + 1), and za(k + 1) according to Equations (47)–(50). |
| Step 5: | Set k = k + 1; go to step 1. |
5. Case Studies and Analysis
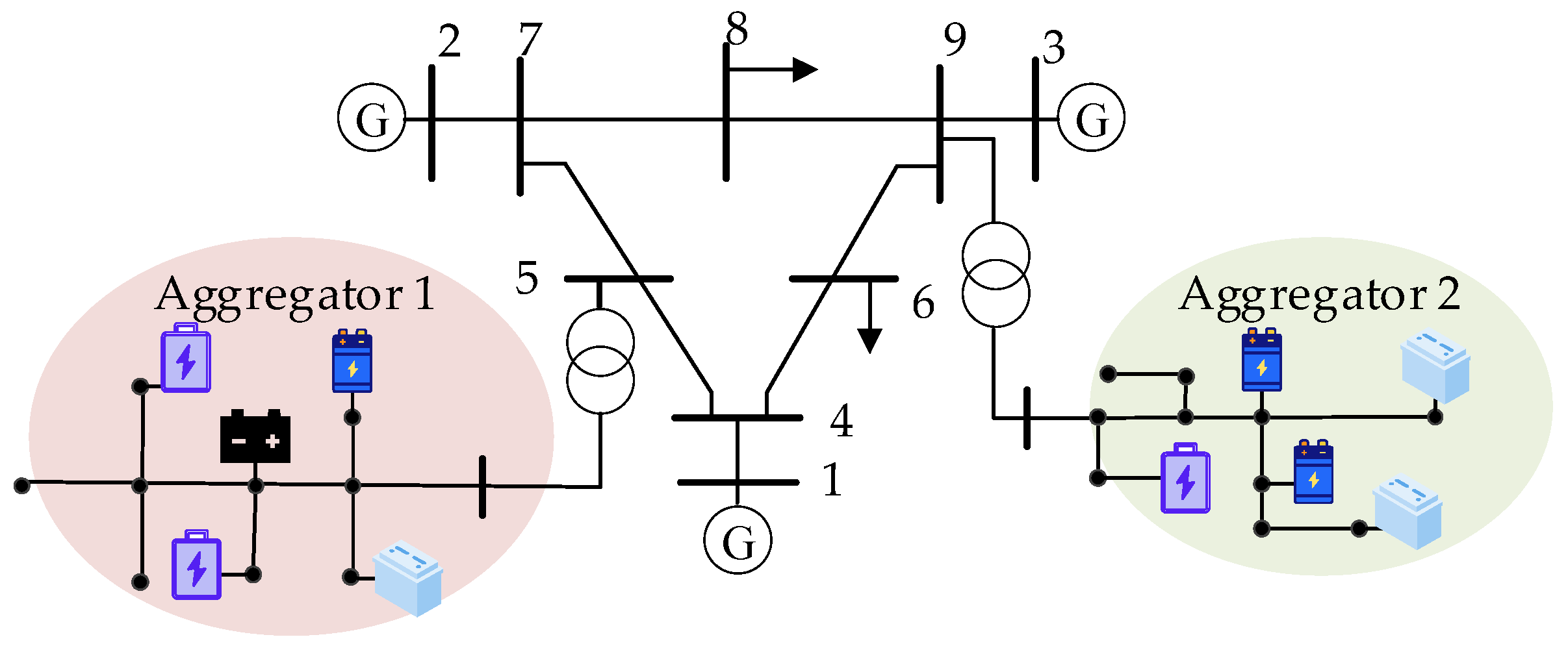
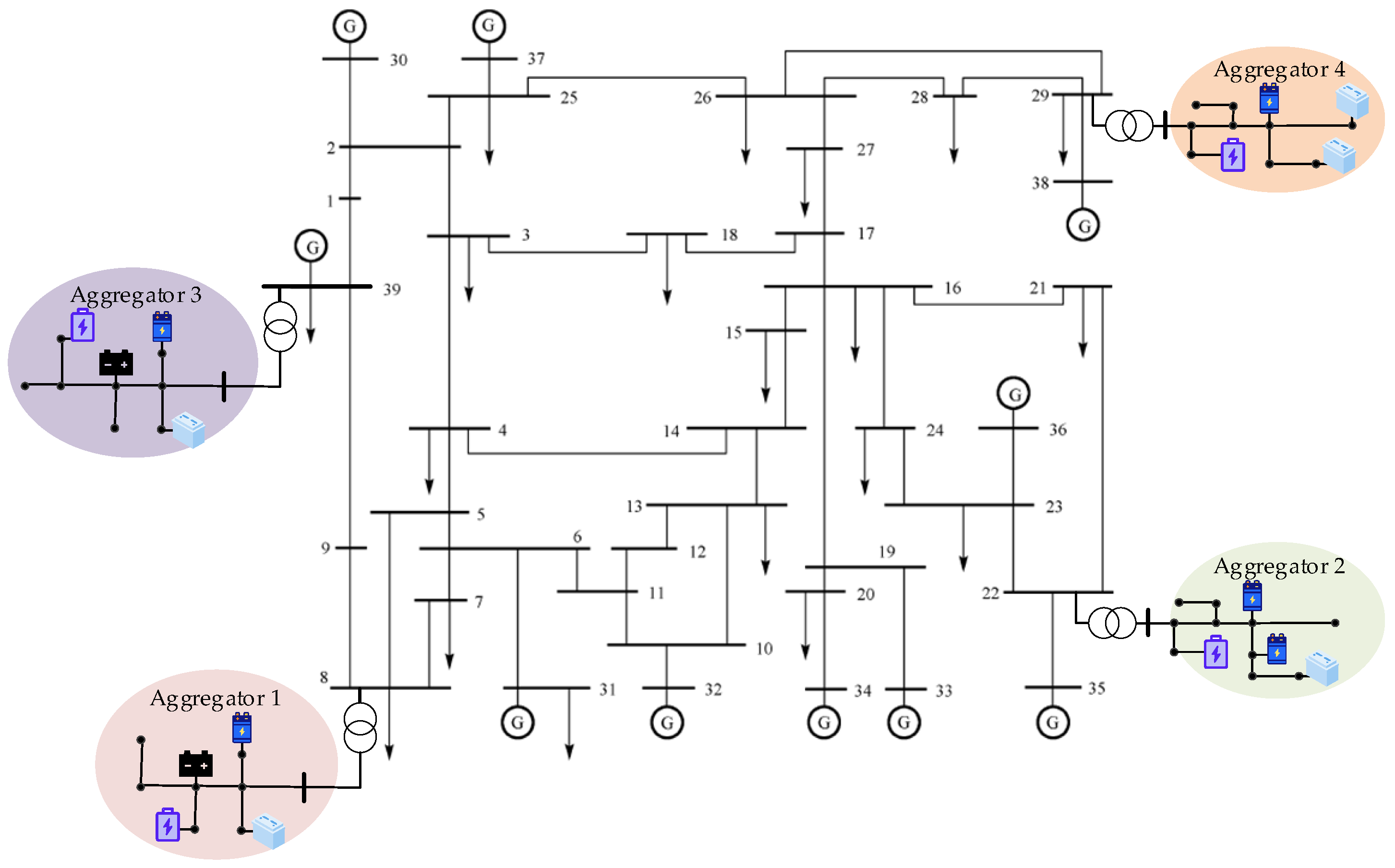
5.1. Parameter Setup
5.2. Result Analysis
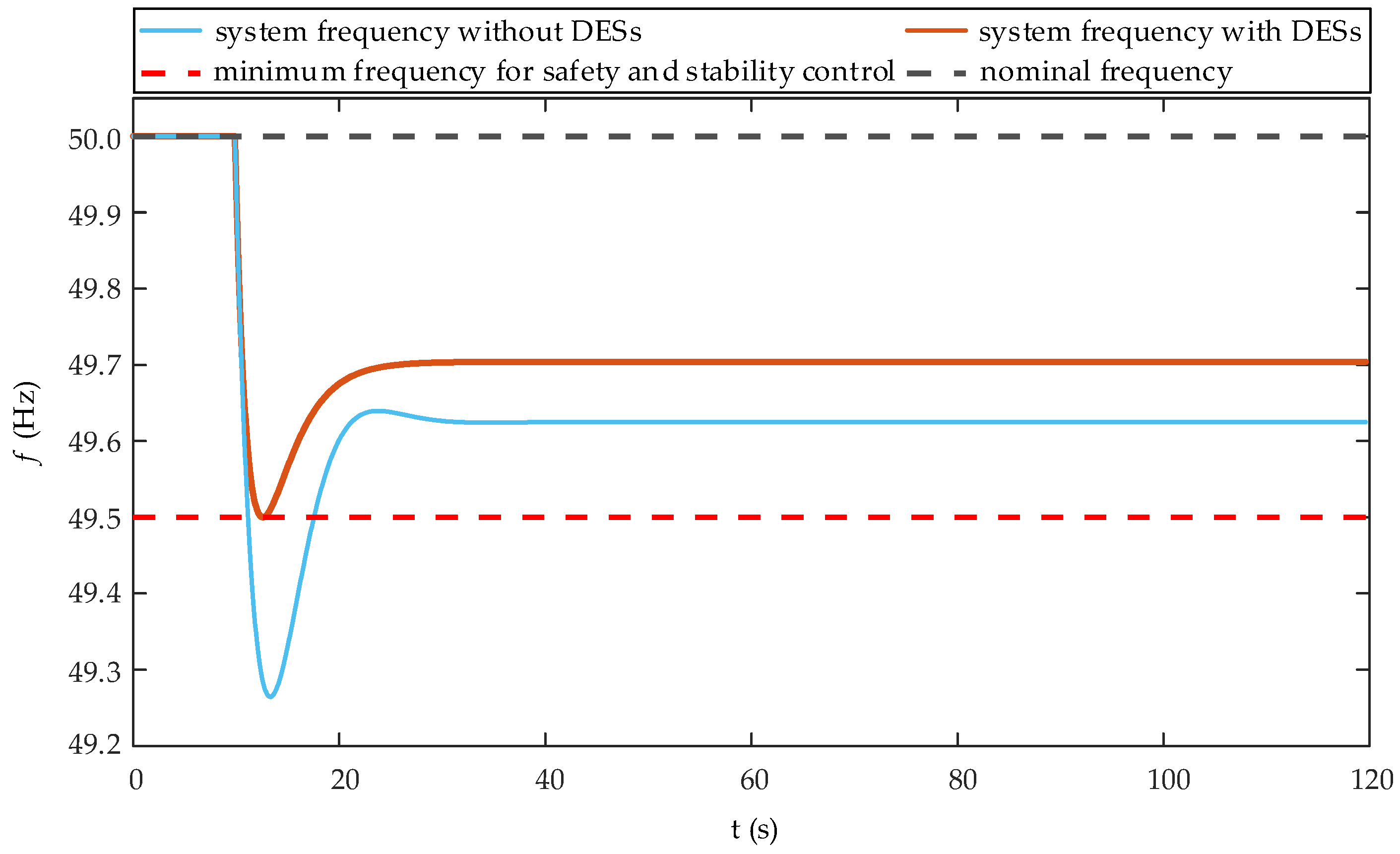
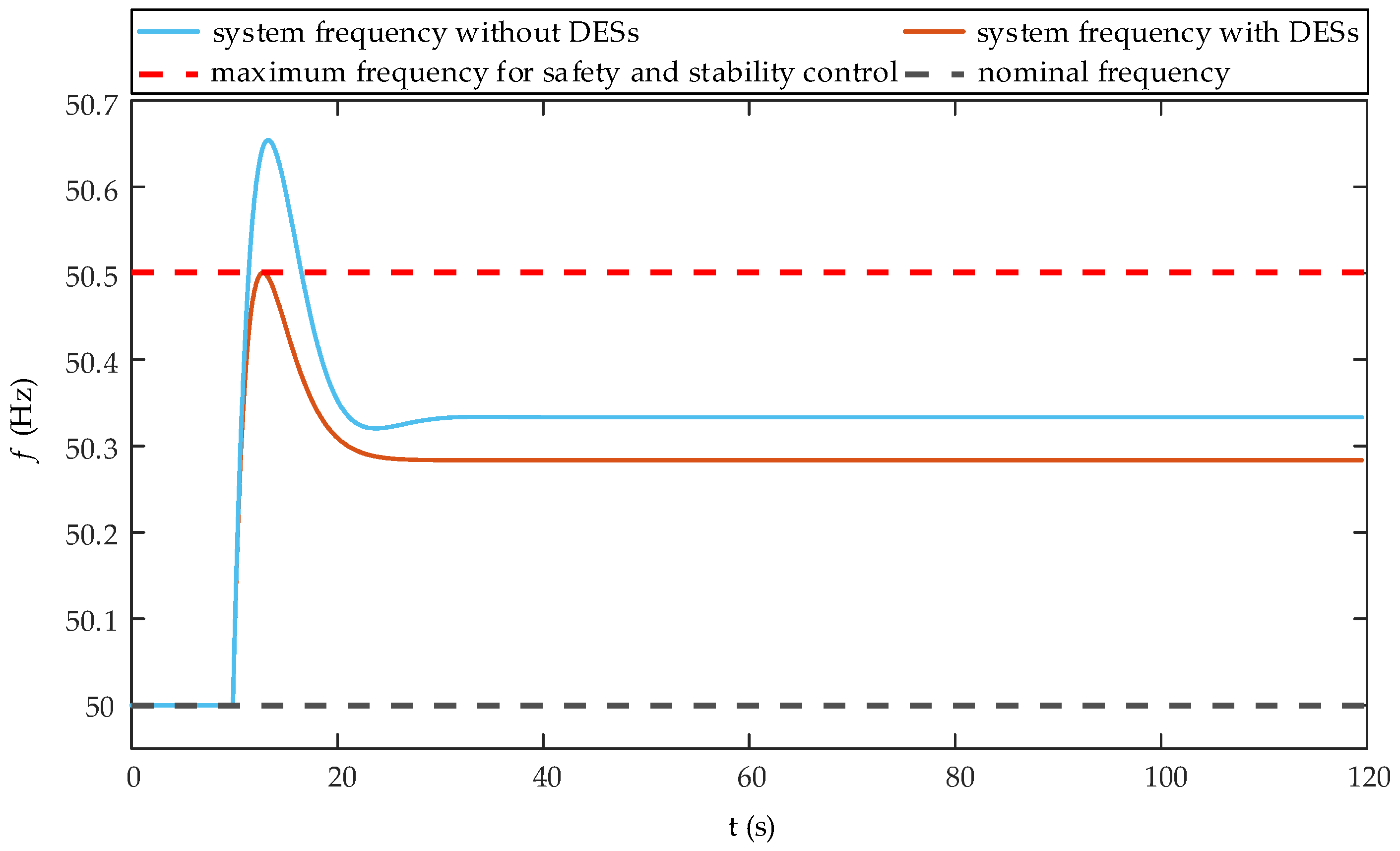
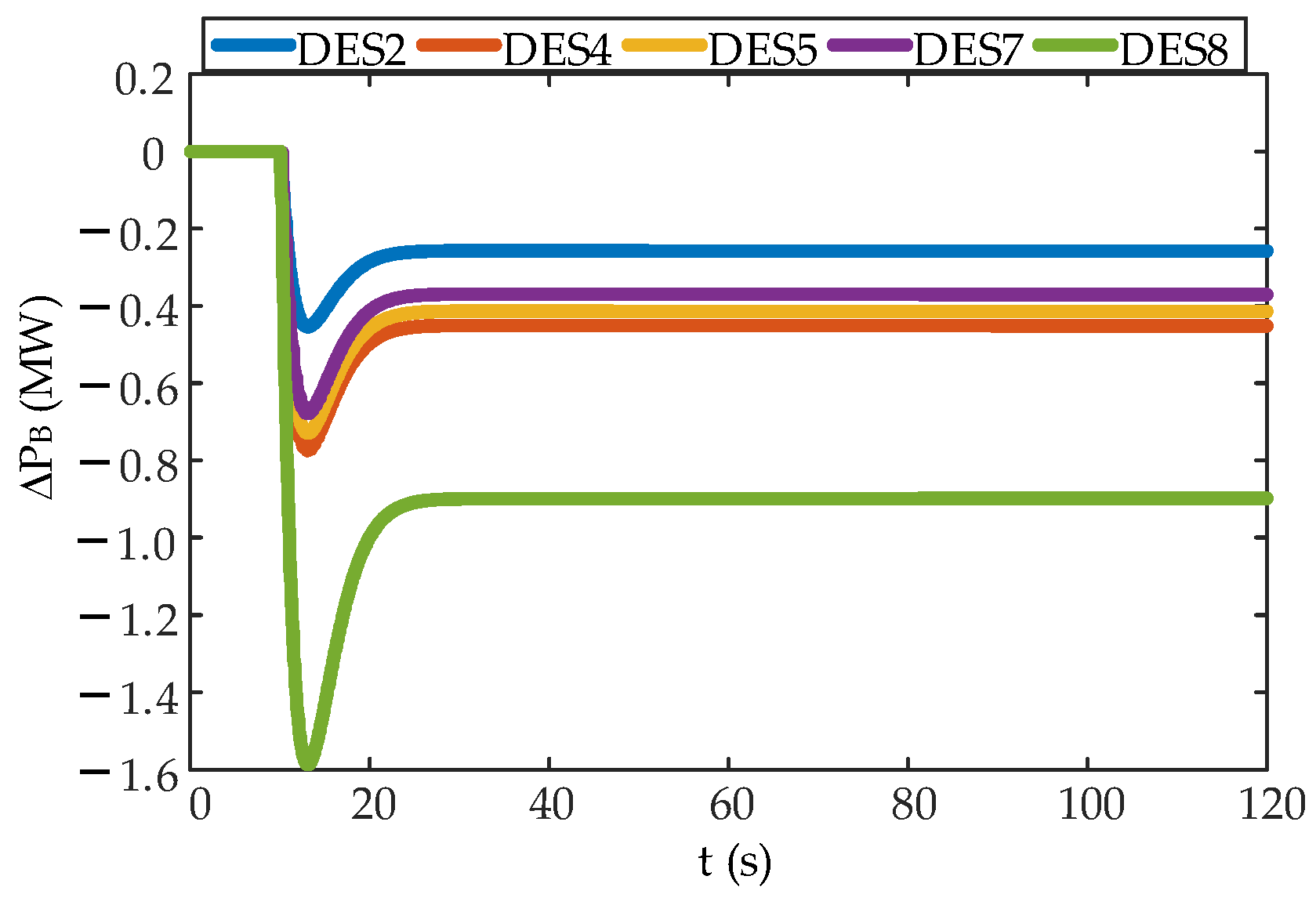
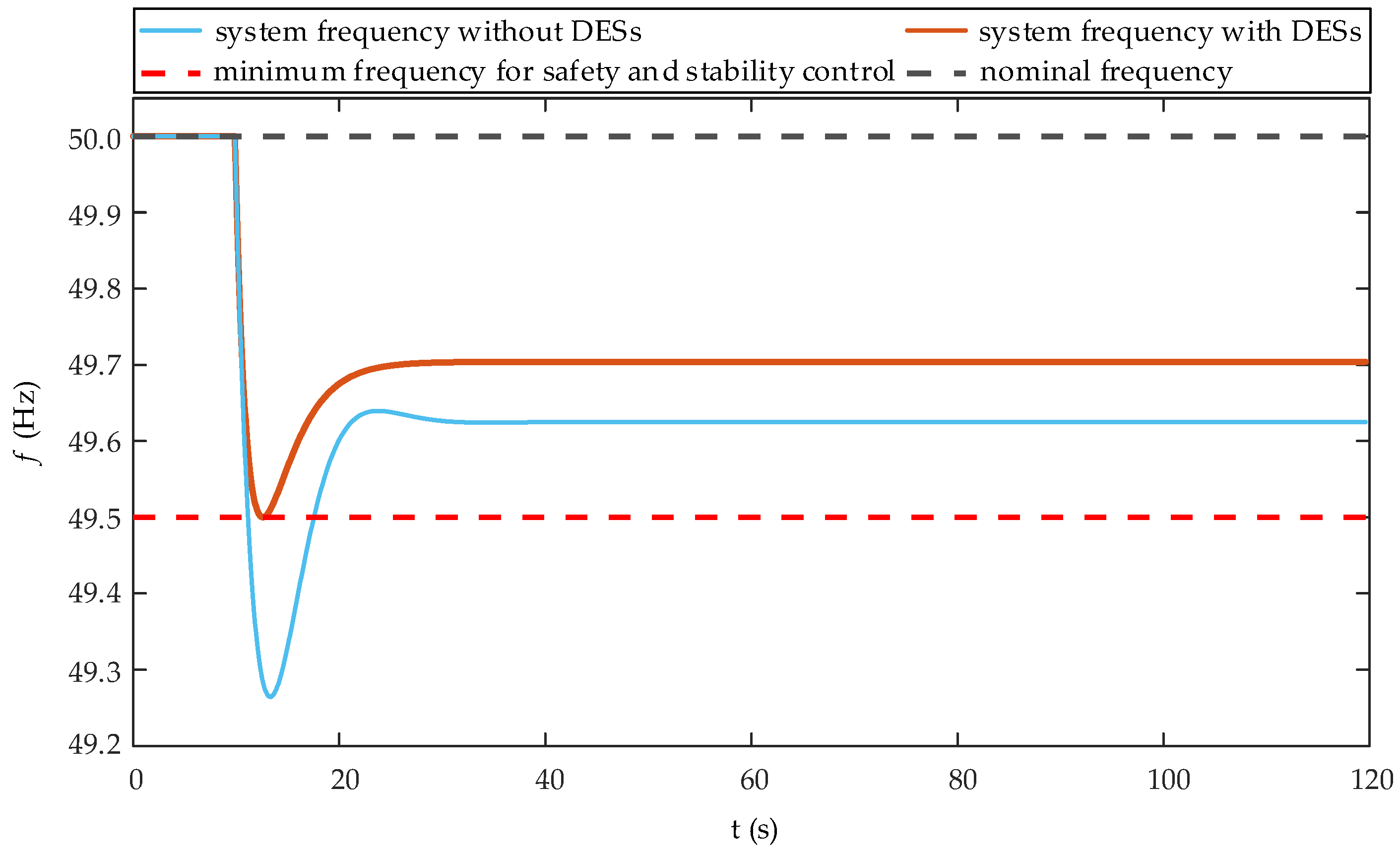
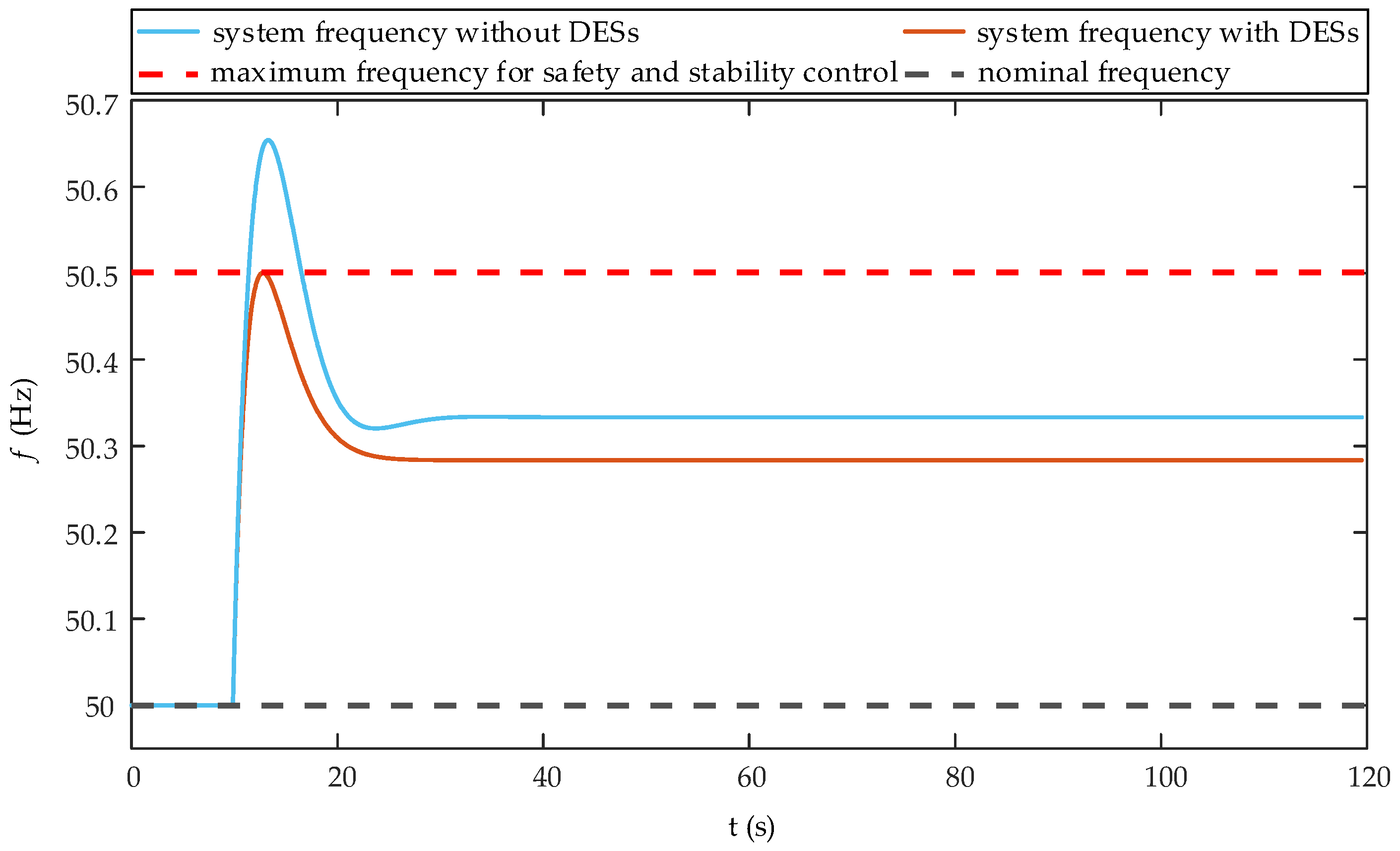
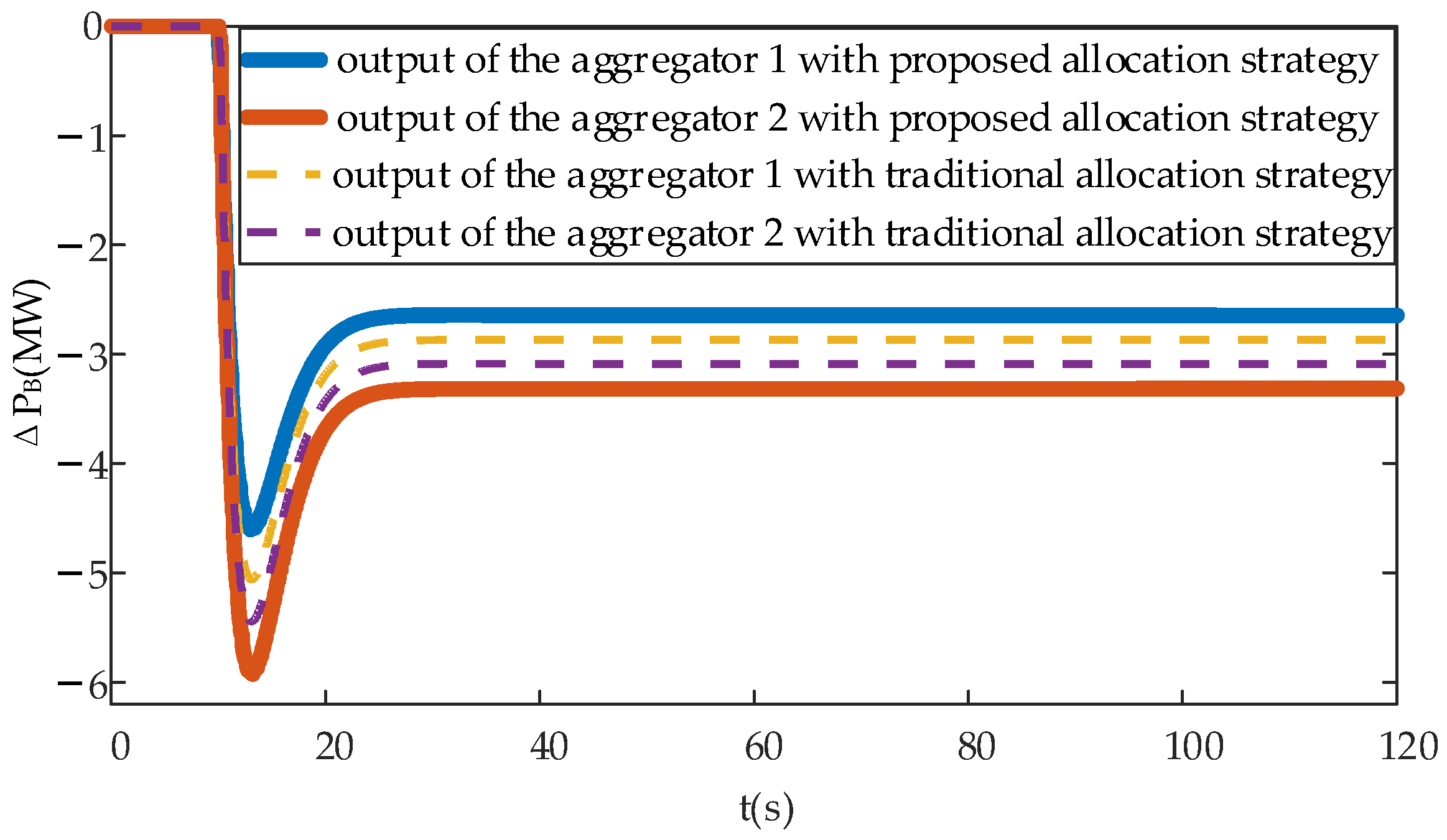
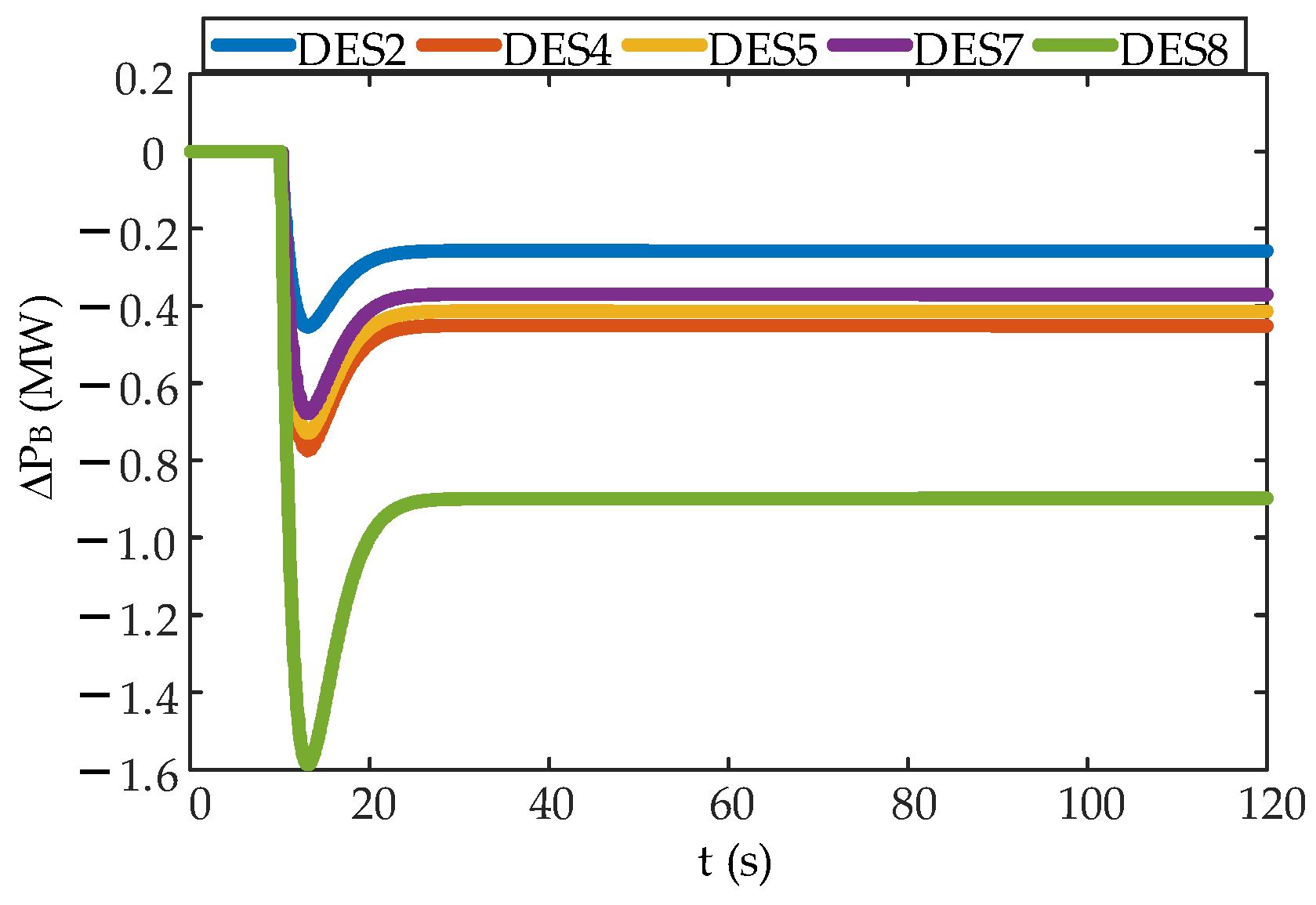
5.2.1. Analysis of Case 1
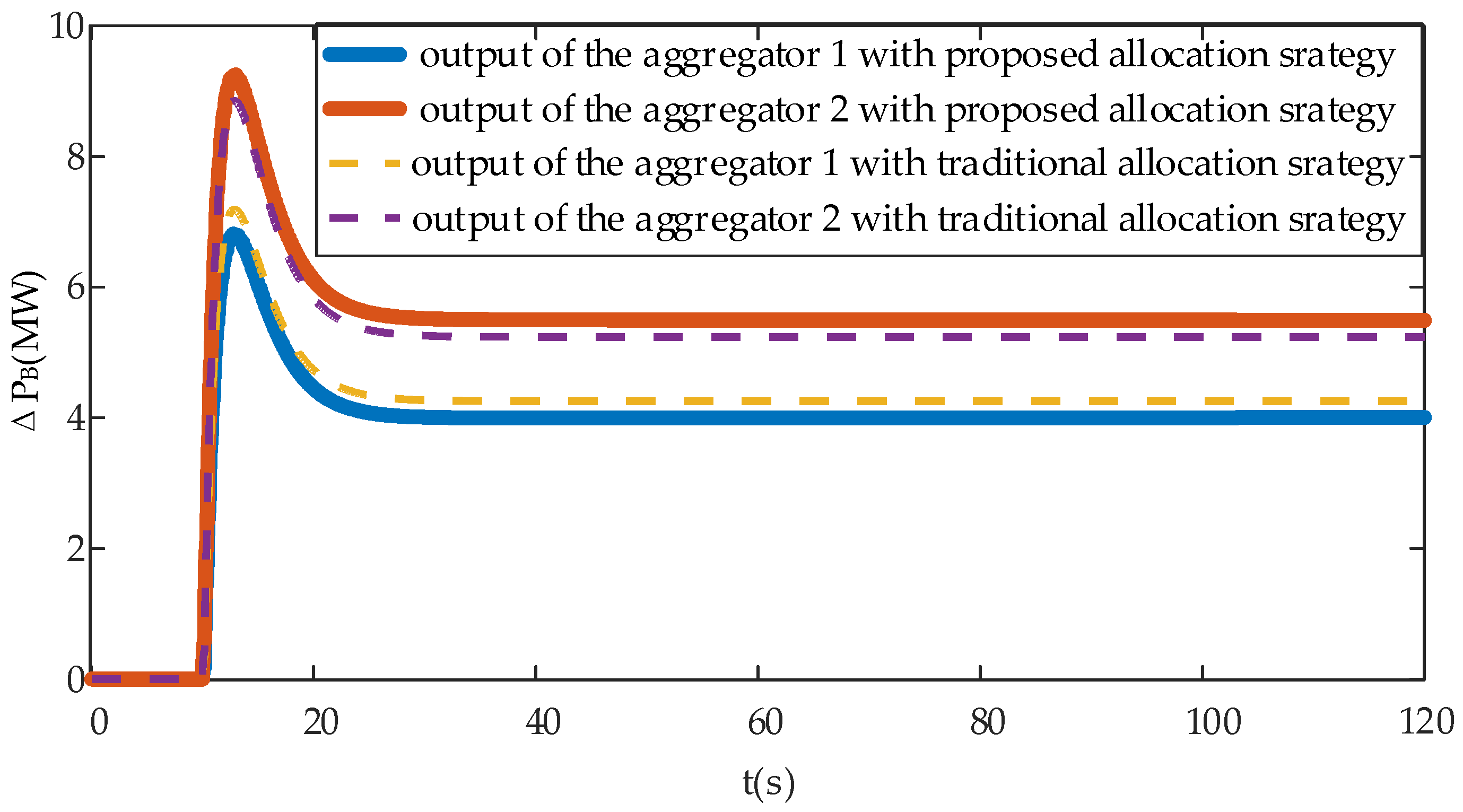
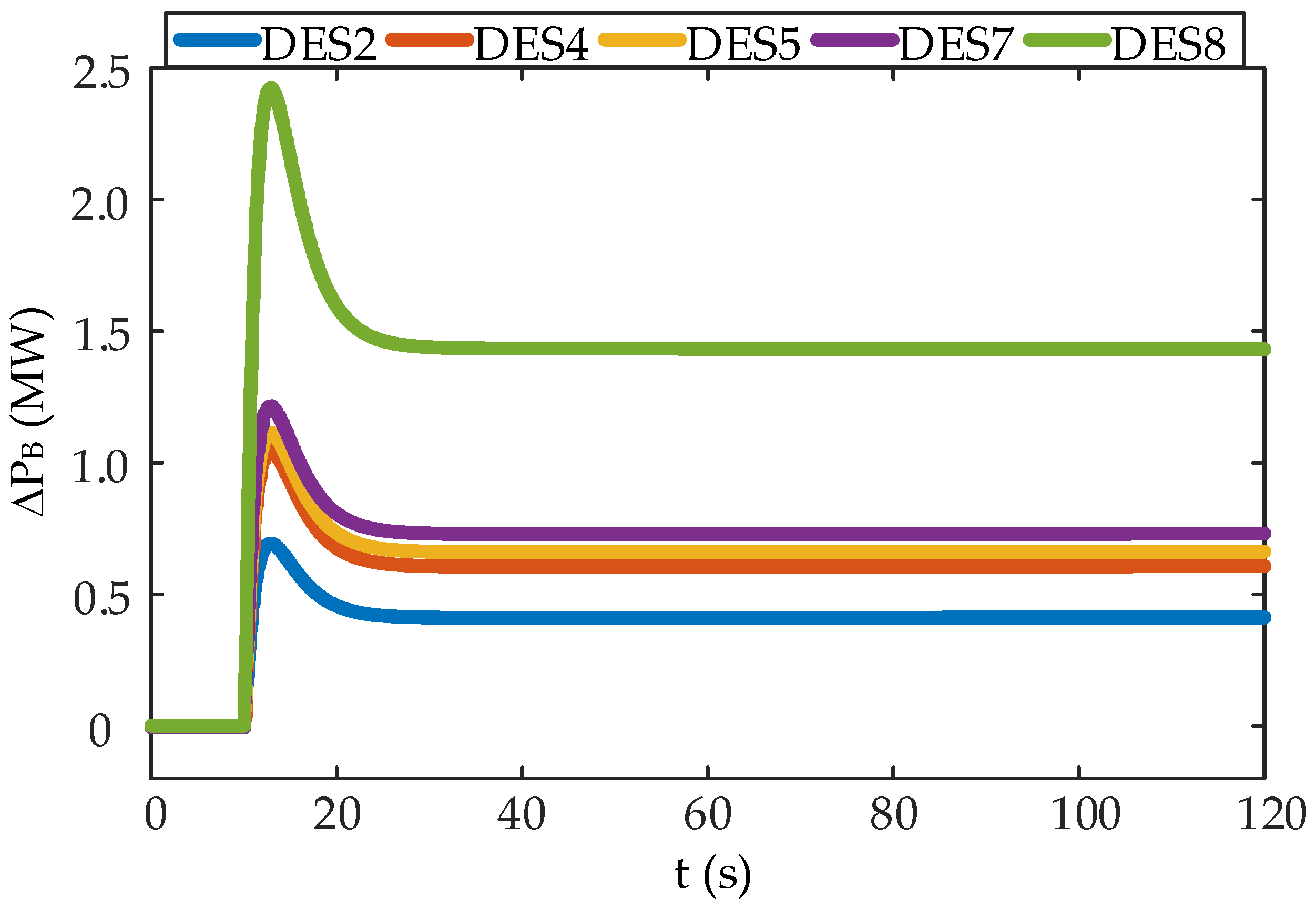
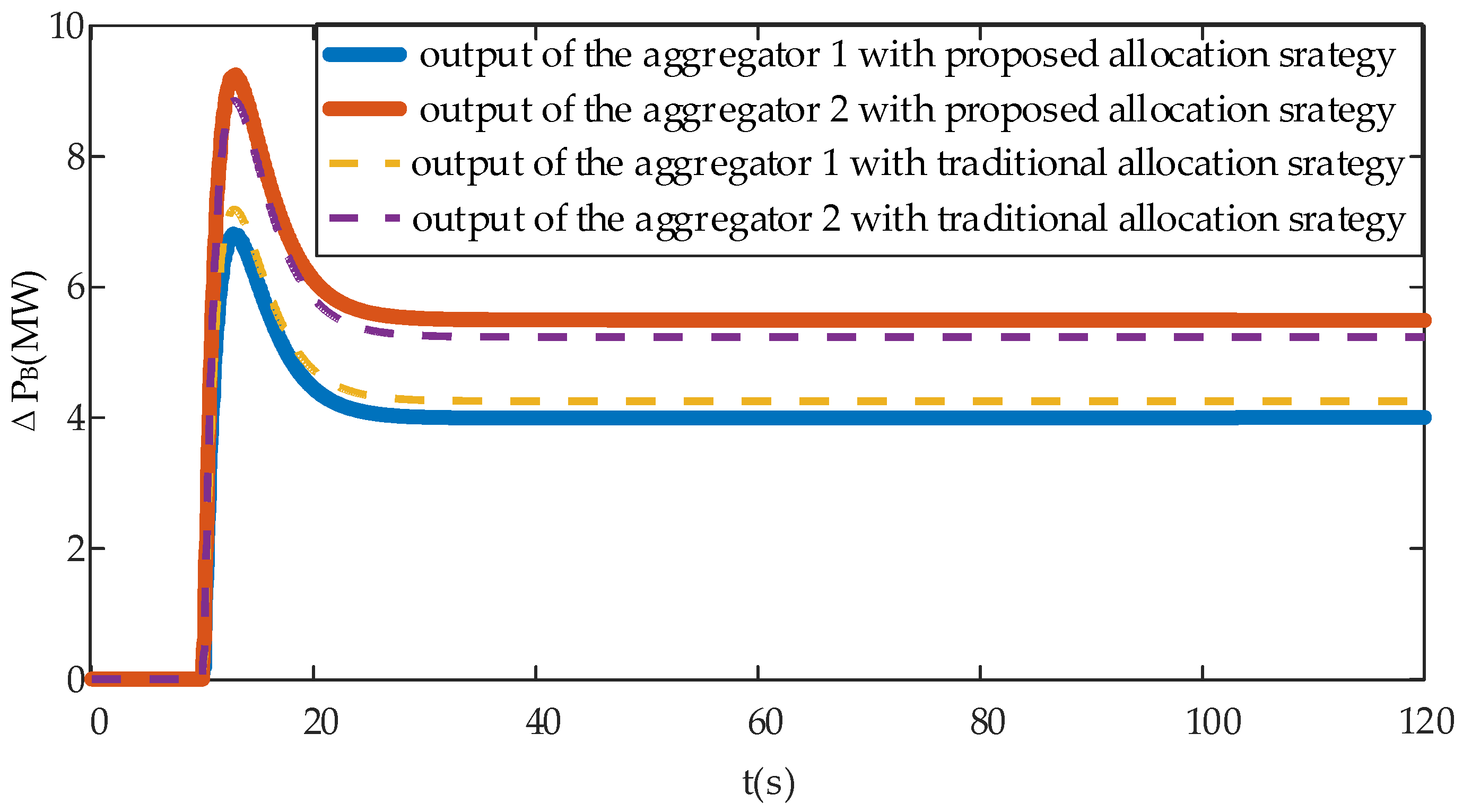
5.2.2. Analysis of Case 2
5.2.3. Sensitivity of the PFR Power Allocation Model
5.2.4. Performance of the DIPM
5.2.5. Scalability of the PFR Power Allocation Strategy
6. Conclusions
- (1)
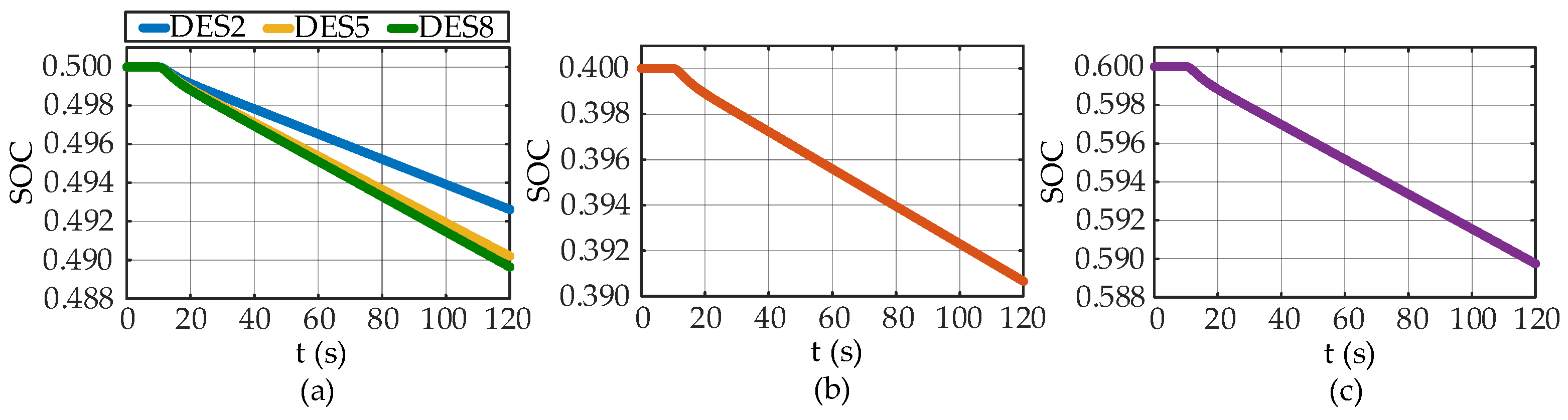
- The proposed PFR power allocation strategy can fully consider the differences in the power, capacity, SOC, and FR cost of various types of DESs and intelligently allocate the FR tasks. Furthermore, the proposed allocation strategy can slow down the SOC offset in the FR process to ensure the continuity of DES participating in FR.
- (2)
- By applying the DIPM technique for distributed solving, the information exchanged by each aggregator does not involve any private data or the variable information of a single DES, which can ensure the privacy of each aggregator. In addition, compared with ADMM and S-ADMM, the DIPM was superior in terms of both computational efficiency and regulation performance.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aggregator Number | DES Number | DES Type | Maximum Active Power (MW) | Rated Capacity (MWh) | Initial SOC | Active Power Deviation Cost Coefficient | SOC Offset Cost Coefficient |
|---|---|---|---|---|---|---|---|
| 1 | 1 | Supercapacitor | 20 | 1.085 | 0.5 | 0.3 | 0.15 |
| 1 | 2 | Superconducting magnetic energy storage | 14 | 1.755 | 0.5 | 0.7 | 0.15 |
| 1 | 3 | Lithium battery energy storage | 10 | 4.45 | 0.5 | 0.2 | 0.15 |
| 1 | 4 | Flywheel energy storage | 11 | 2.055 | 0.4 | 0.45 | 0.15 |
| 2 | 5 | Flywheel energy storage | 18 | 2.055 | 0.5 | 0.45 | 0.15 |
| 2 | 6 | Supercapacitor | 14 | 1.125 | 0.5 | 0.3 | 0.15 |
| 2 | 7 | Flywheel energy storage | 14 | 2.055 | 0.6 | 0.45 | 0.15 |
| 2 | 8 | Lithium battery energy storage | 10 | 4.36 | 0.5 | 0.2 | 0.15 |
| 3 | 9 | Lithium battery energy storage | 9 | 4.44 | 0.5 | 0.2 | 0.15 |
| 3 | 10 | Supercapacitor | 18 | 1.138 | 0.5 | 0.3 | 0.15 |
| 3 | 11 | Flywheel energy storage | 18 | 1.125 | 0.6 | 0.3 | 0.15 |
| 3 | 12 | Superconducting magnetic energy storage | 14 | 1.755 | 0.3 | 0.7 | 0.15 |
| 4 | 13 | Lithium battery energy storage | 10 | 4.45 | 0.5 | 0.2 | 0.15 |
| 4 | 14 | Lithium battery energy storage | 9 | 5.24 | 0.5 | 0.2 | 0.15 |
| 4 | 15 | Supercapacitor | 18 | 1.138 | 0.4 | 0.3 | 0.15 |
| 4 | 16 | Flywheel energy storage | 18 | 2.055 | 0.5 | 0.45 | 0.15 |
References
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-García, Á. Power Systems with High Renewable Energy Sources: A Review of Inertia and Frequency Control Strategies over Time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Kez, D.A.; Foley, A.M.; Morrow, D.J. Analysis of Fast Frequency Response Allocations in Power Systems with High System Non-Synchronous Penetrations. IEEE Trans. Ind. Appl. 2022, 58, 3087–3101. [Google Scholar] [CrossRef]
- Yoo, Y.; Jung, S.; Jang, G. Dynamic Inertia Response Support by Energy Storage System with Renewable Energy Integration Substation. J. Mod. Power Syst. Clean Energy 2020, 8, 260–266. [Google Scholar] [CrossRef]
- Xiang, Y.; Lu, Y.; Liu, J. Deep Reinforcement Learning Based Topology-Aware Voltage Regulation of Distribution Networks with Distributed Energy Storage. Appl. Energy 2023, 332, 120510. [Google Scholar] [CrossRef]
- Ghazavi Dozein, M.; Gomis-Bellmunt, O.; Mancarella, P. Simultaneous Provision of Dynamic Active and Reactive Power Response from Utility-Scale Battery Energy Storage Systems in Weak Grids. IEEE Trans. Power Syst. 2021, 36, 5548–5557. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, Y.-J.A. Optimal Coordinated Control of Multiple Battery Energy Storage Systems for Primary Frequency Regulation. IEEE Trans. Power Syst. 2019, 34, 555–565. [Google Scholar] [CrossRef]
- Sun, J.; Zhao, Y.; Zhang, N.; Chen, X.; Hu, Q.; Song, J. A Dynamic Distributed Energy Storage Control Strategy for Providing Primary Frequency Regulation Using Multi-armed Bandits Method. IET Gener. Transm. Distrib. 2022, 16, 669–679. [Google Scholar] [CrossRef]
- Mejia-Ruiz, G.E.; Paternina, M.R.A.; Segundo Sevilla, F.R.; Korba, P. Fast Hierarchical Coordinated Controller for Distributed Battery Energy Storage Systems to Mitigate Voltage and Frequency Deviations. Appl. Energy 2022, 323, 119622. [Google Scholar] [CrossRef]
- Cheng, Y.; Tabrizi, M.; Sahni, M.; Povedano, A.; Nichols, D. Dynamic Available AGC Based Approach for Enhancing Utility Scale Energy Storage Performance. IEEE Trans. Smart Grid 2014, 5, 1070–1078. [Google Scholar] [CrossRef]
- Djouadi, H.; Ouari, K.; Belkhier, Y.; Lehouche, H.; Ibaouene, C.; Bajaj, M.; AboRas, K.M.; Khan, B.; Kamel, S. Non-linear Multivariable Permanent Magnet Synchronous Machine Control: A Robust Non-linear Generalized Predictive Controller Approach. IET Control. Theory Appl. 2023, 17, 1688–1702. [Google Scholar] [CrossRef]
- Ouali, N.; Lehouche, H.; Belkhier, Y.; Achour, A. Indoor Temperature Regulation and Energy Consumption inside a Working Office in Building System Using a Predictive Functional Control. Energy Sources Part A Recovery Util. Environ. Eff. 2021, 1–21. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Ni, W.; Wen, F. A Model Predictive Control Based Optimal Task Allocation among Multiple Energy Storage Systems for Secondary Frequency Regulation Service Provision. Energies 2023, 16, 1228. [Google Scholar] [CrossRef]
- Oshnoei, A.; Kheradmandi, M.; Muyeen, S.M. Robust Control Scheme for Distributed Battery Energy Storage Systems in Load Frequency Control. IEEE Trans. Power Syst. 2020, 35, 4781–4791. [Google Scholar] [CrossRef]
- Dou, C.-X.; Yang, J.; Li, X.; Gui, T.; Bi, Y. Decentralized Coordinated Control for Large Power System Based on Transient Stability Assessment. Int. J. Electr. Power Energy Syst. 2013, 46, 153–162. [Google Scholar] [CrossRef]
- Huang, B.; Li, Y.; Zhan, F.; Sun, Q.; Zhang, H. A Distributed Robust Economic Dispatch Strategy for Integrated Energy System Considering Cyber-Attacks. IEEE Trans. Ind. Inform. 2022, 18, 880–890. [Google Scholar] [CrossRef]
- Duan, Y.; He, X.; Zhao, Y. Distributed Algorithm Based on Consensus Control Strategy for Dynamic Economic Dispatch Problem. Int. J. Electr. Power Energy Syst. 2021, 129, 106833. [Google Scholar] [CrossRef]
- Pourbabak, H.; Alsafasfeh, Q.; Su, W. A Distributed Consensus-Based Algorithm for Optimal Power Flow in DC Distribution Grids. IEEE Trans. Power Syst. 2020, 35, 3506–3515. [Google Scholar] [CrossRef]
- Chai, Y.; Liu, Y.; Bai, L.; Wang, C.; Guo, L.; Wang, Z.; Xue, Y. Hierarchical Distributed Optimal Power Flow of HV and MV Distribution Networks with Continuous and Discrete Devices. IEEE Trans. Power Syst. 2023, 38, 1009–1021. [Google Scholar] [CrossRef]
- Zhou, B.; Shen, X.; Pan, C.; Bai, Y.; Wu, T. Optimal Reactive Power Dispatch under Transmission and Distribution Coordination Based on an Accelerated Augmented Lagrangian Algorithm. Energies 2022, 15, 3867. [Google Scholar] [CrossRef]
- Khan, I.; Li, Z.; Xu, Y.; Gu, W. Distributed Control Algorithm for Optimal Reactive Power Control in Power Grids. Int. J. Electr. Power Energy Syst. 2016, 83, 505–513. [Google Scholar] [CrossRef]
- Bao, W.; Wu, Q.; Ding, L.; Huang, S.; Terzija, V. A Hierarchical Inertial Control Scheme for Multiple Wind Farms with BESSs Based on ADMM. IEEE Trans. Sustain. Energy 2021, 12, 751–760. [Google Scholar] [CrossRef]
- Fu, R.; Wu, Y.; Wang, H.; Xie, J. A Distributed Control Strategy for Frequency Regulation in Smart Grids Based on the Consensus Protocol. Energies 2015, 8, 7930–7944. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Tang, Y.; Liao, K.; Syed, M.H.; Guillo-Sansano, E.; Burt, G.M. Aggregated Energy Storage for Power System Frequency Control: A Finite-Time Consensus Approach. IEEE Trans. Smart Grid 2019, 10, 3675–3686. [Google Scholar] [CrossRef]
- Kabsha, M.M.; Rather, Z.H. A New Control Scheme for Fast Frequency Support from HVDC Connected Offshore Wind Farm in Low-Inertia System. IEEE Trans. Sustain. Energy 2020, 11, 1829–1837. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, X.; Ji, X.; Yang, M.; Han, X.; Yin, Z. Distributional Two-Level Synergetic Unit Commitment Considering Three Scheduling States. Electr. Power Syst. Res. 2022, 213, 108771. [Google Scholar] [CrossRef]
- Lai, X.; Zhong, H.; Xia, Q.; Kang, C. Decentralized Intraday Generation Scheduling for Multiarea Power Systems via Dynamic Multiplier-Based Lagrangian Relaxation. IEEE Trans. Power Syst. 2017, 32, 454–463. [Google Scholar] [CrossRef]
- Yan, W.; Wen, L.; Li, W.; Chung, C.Y.; Wong, K.P. Decomposition–Coordination Interior Point Method and Its Application to Multi-Area Optimal Reactive Power Flow. Int. J. Electr. Power Energy Syst. 2011, 33, 55–60. [Google Scholar] [CrossRef]
- Lu, W.; Liu, M.; Lin, S.; Li, L. Fully Decentralized Optimal Power Flow of Multi-Area Interconnected Power Systems Based on Distributed Interior Point Method. IEEE Trans. Power Syst. 2018, 33, 901–910. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, L. Risk-Profit Analysis of Regional Energy Service Providers by Regularized Primal-Dual Interior Point Method. Int. J. Electr. Power Energy Syst. 2022, 135, 107542. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A Low-Order System Frequency Response Model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Zhang, J.; Liang, J.; Chen, H.; Zhai, S.; He, D.; Xu, J. Secondary Frequency Modulation Control Strategy of Power System Using Energy Storage Battery. In Proceedings of the 2022 7th International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 23–26 September 2022; pp. 396–401. [Google Scholar]
- Zhao, Q.; Zhang, Y.; Chen, Z.; Gao, Z. Frequency Characteristic Analysis of Low-Inertia Power System Considering Energy Storage. Proc. CSEE 2023, 43, 904–914. [Google Scholar]
- Khoshfetrat Pakazad, S.; Hansson, A.; Andersen, M.S.; Nielsen, I. Distributed Primal–Dual Interior-Point Methods for Solving Tree-Structured Coupled Convex Problems Using Message-Passing. Optim. Method Softw. 2017, 32, 401–435. [Google Scholar] [CrossRef]
- Hu, Z.; Gao, B.; Sun, R. An Active Primary Frequency Regulation Strategy for Grid Integrated Wind Farms Based on Model Predictive Control. Sustain. Energy Grids Netw. 2022, 32, 100955. [Google Scholar] [CrossRef]
- Ravanji, M.H.; Canizares, C.A.; Parniani, M. Modeling and Control of Variable Speed Wind Turbine Generators for Frequency Regulation. IEEE Trans. Sustain. Energy 2020, 11, 916–927. [Google Scholar] [CrossRef]


| Parameters | Values |
|---|---|
| Nominal frequency f | 50 Hz |
| Mechanical power gain coefficient Km | 0.95 |
| Ratio of total power generated by the high-pressure turbine FH | 0.3 |
| Governor regulation coefficient R | 0.05 |
| Turbine equivalent inertia time TR | 8 s |
| System equivalent inertia time H | 7 s |
| Load damping coefficient D | 1 |
| Response time of DES TB | 0.1 s |
| Aggregator Number | DES Number | DES’ Type | Maximum Active Power (MW) | Rated Capacity (MWh) | Initial SOC | Active Power Deviation Cost Coefficient | SOC Offset Cost Coefficient |
|---|---|---|---|---|---|---|---|
| 1 | 1 | Supercapacitor | 20 | 1.085 | 0.5 | 0.3 | 0.15 |
| 1 | 2 | Superconducting magnetic energy storage | 14 | 1.755 | 0.5 | 0.7 | 0.15 |
| 1 | 3 | Lithium battery energy storage | 10 | 4.45 | 0.5 | 0.2 | 0.15 |
| 1 | 4 | Flywheel energy storage | 11 | 2.055 | 0.4 | 0.45 | 0.15 |
| 1 | 5 | Flywheel energy storage | 18 | 2.055 | 0.5 | 0.45 | 0.15 |
| 2 | 6 | Supercapacitor | 14 | 1.125 | 0.5 | 0.3 | 0.15 |
| 2 | 7 | Flywheel energy storage | 14 | 2.055 | 0.6 | 0.45 | 0.15 |
| 2 | 8 | Lithium battery energy storage | 10 | 4.36 | 0.5 | 0.2 | 0.15 |
| 2 | 9 | Lithium battery energy storage | 9 | 4.44 | 0.5 | 0.2 | 0.15 |
| 2 | 10 | Supercapacitor | 18 | 1.138 | 0.5 | 0.3 | 0.15 |
| Allocation Strategy | FR Cost of Aggregator 1 (CNY) | FR Cost of Aggregator 2 (CNY) | Total FR Cost (CNY) |
|---|---|---|---|
| Proposed strategy | 2944.26 | 2546.67 | 5490.93 |
| Traditional strategy | 3026.84 | 2476.03 | 5502.87 |
| Allocation Strategy | FR Cost of Aggregator 1 (CNY) | FR Cost of Aggregator 2 (CNY) | Total FR Cost (CNY) |
|---|---|---|---|
| Proposed strategy | 2410.84 | 2757.82 | 5168.66 |
| Traditional strategy | 2390.48 | 2789.77 | 5180.25 |
| Prediction Horizon (s) | Total Cost of Frequency Regulation (CNY) | Solution Time of Quadprog (s) | Solution Time of DIPM (s) |
|---|---|---|---|
| 2 | 5528.49 | 0.0065 | 0.0183 |
| 4 | 5503.35 | 0.0109 | 0.0742 |
| 5 | 5490.93 | 0.0150 | 0.1076 |
| 6 | 5482.61 | 0.0185 | 0.1640 |
| 8 | 5467.27 | 0.0294 | 0.2161 |
| 10 | 5455.32 | 0.0420 | 0.3122 |
| Algorithm | Iterations | Solution Time (s) | Total FR Cost (CNY) |
|---|---|---|---|
| Quadprog | - | 0.0139 | 5490.93 |
| ADMM | 39 | 0.3341 | 5491.01 |
| S-ADMM | 63 | 0.2563 | 5491.02 |
| DIPM | 9 | 0.1076 | 5490.57 |
| Allocation Strategy | FR Cost of Aggregator 1 (CNY) | FR Cost of Aggregator 2 (CNY) | FR Cost of Aggregator 3 (CNY) | FR Cost of Aggregator 4 (CNY) | Total FR Cost (CNY) |
|---|---|---|---|---|---|
| Proposed strategy | 3923.55 | 2904.87 | 9160.96 | 2453.76 | 18,443.14 |
| Traditional strategy | 4101.76 | 2871.70 | 9253.47 | 2682.79 | 18,909.73 |
| Algorithm | Iterations | Solution Time (s) | Total FR Cost (CNY) |
|---|---|---|---|
| Quadprog | - | 0.0295 | 18,443.14 |
| ADMM | 78 | 1.3249 | 18,444.36 |
| S-ADMM | 127 | 0.9258 | 18,444.75 |
| DIPM | 9 | 0.1421 | 18,443.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, T.; He, S.; Guan, Y.; Liu, M.; Zhao, W.; Wang, T.; Tang, W. A Novel Allocation Strategy Based on the Model Predictive Control of Primary Frequency Regulation Power for Multiple Distributed Energy Storage Aggregators. Energies 2023, 16, 6140. https://doi.org/10.3390/en16176140
Mao T, He S, Guan Y, Liu M, Zhao W, Wang T, Tang W. A Novel Allocation Strategy Based on the Model Predictive Control of Primary Frequency Regulation Power for Multiple Distributed Energy Storage Aggregators. Energies. 2023; 16(17):6140. https://doi.org/10.3390/en16176140
Chicago/Turabian StyleMao, Tian, Shan He, Yingcong Guan, Mingbo Liu, Wenmeng Zhao, Tao Wang, and Wenjun Tang. 2023. "A Novel Allocation Strategy Based on the Model Predictive Control of Primary Frequency Regulation Power for Multiple Distributed Energy Storage Aggregators" Energies 16, no. 17: 6140. https://doi.org/10.3390/en16176140
APA StyleMao, T., He, S., Guan, Y., Liu, M., Zhao, W., Wang, T., & Tang, W. (2023). A Novel Allocation Strategy Based on the Model Predictive Control of Primary Frequency Regulation Power for Multiple Distributed Energy Storage Aggregators. Energies, 16(17), 6140. https://doi.org/10.3390/en16176140