
Decentralized Emergency Control of AC Power Grid Modes with Distributed Generation


 ,
,  , and
, and 
Abstract
1. Introduction
- The need for a developed electric grid for transmission and distribution of energy from its remote large sources leads to unjustified losses of generated electricity and costs for the creation and operation of electric networks. Suffice it to say that the network component in the cost of electricity for consumers reaches half, and the total losses of electricity during its transmission and distribution reach 20%.
- The inability to fully use thermal energy at large fuel-fired power plants remote from consumers leads to the predominant use of condensing thermal power plants with a useful fuel use of about 40%, instead of the possible 80–90% at thermal power plants with a combined useful heat and electricity generation.
- Long construction and payback periods for large generating and grid facilities (20–25 years) are not very attractive for investors who focus on 5–7 years and their implementation through investment components in electricity tariffs lead to their growth and decreases in the standard of living of the population and the competitive ability of the national economy.
- Focusing on the use of large power plants leads to ignoring small, diverse energy resources, including renewable resources, located close to energy consumers, the use of which significantly reduces losses during energy transmission.
- Orientation to the use of large power plants leads to monofunctionality of the power industry, limiting its purpose to energy supply to consumers, in contrast to the polyfunctionality that occurs in multi-purpose energy production when solving complex problems (energy production at waste-burning and waste-recycling power plants, when integrating energy production into the production cycles of enterprises by using associated and bio-gases).
- The increasing complexity of the tasks of managing the modes of electric power systems as they develop also leads to the complexity of the information and control system, the need for its deep digitalization, which increases vulnerability to cyber attacks within the framework of a centralized control system, and the dependence of the reliability of power supply on the reliability of systems and control centers.
- It should also be noted that time has dictated a sharp increase in the requirements for the survivability of power systems in the face of various external influences, to which exclusively centralized power supply and control systems respond to a small extent due to their structural vulnerability.
2. Methodology
2.1. General Provisions
- By parameter behavior—steady-state or transient;
- According to the compliance of parameters with various requirements—normal, emergency, or post-accident;
- By nature—stable or unstable.
- Emergency management for large disturbances of the normal mode;
- Maintaining the efficiency of the power supply system in post-accident conditions;
- Restore the integrity and normal operation of the network after an emergency or emergency breakdown.
- Independent decision-making by each agent within the limits of its authority and general rules of conduct.
- Unity and mandatory compliance with the general rules for making decisions and actions by agents.
- Maximize the use of local information about the state of the managed system (electric power system mode) by each agent when making decisions.
- Prioritization of decision-making criteria and actions of agents to eliminate violations of the normal regime over decisions to manage normal regimes.
- Limited freedom of action of agents in normal modes by creating violations of the normal mode and conditions for the impossibility of effective actions of agents in adjacent areas.
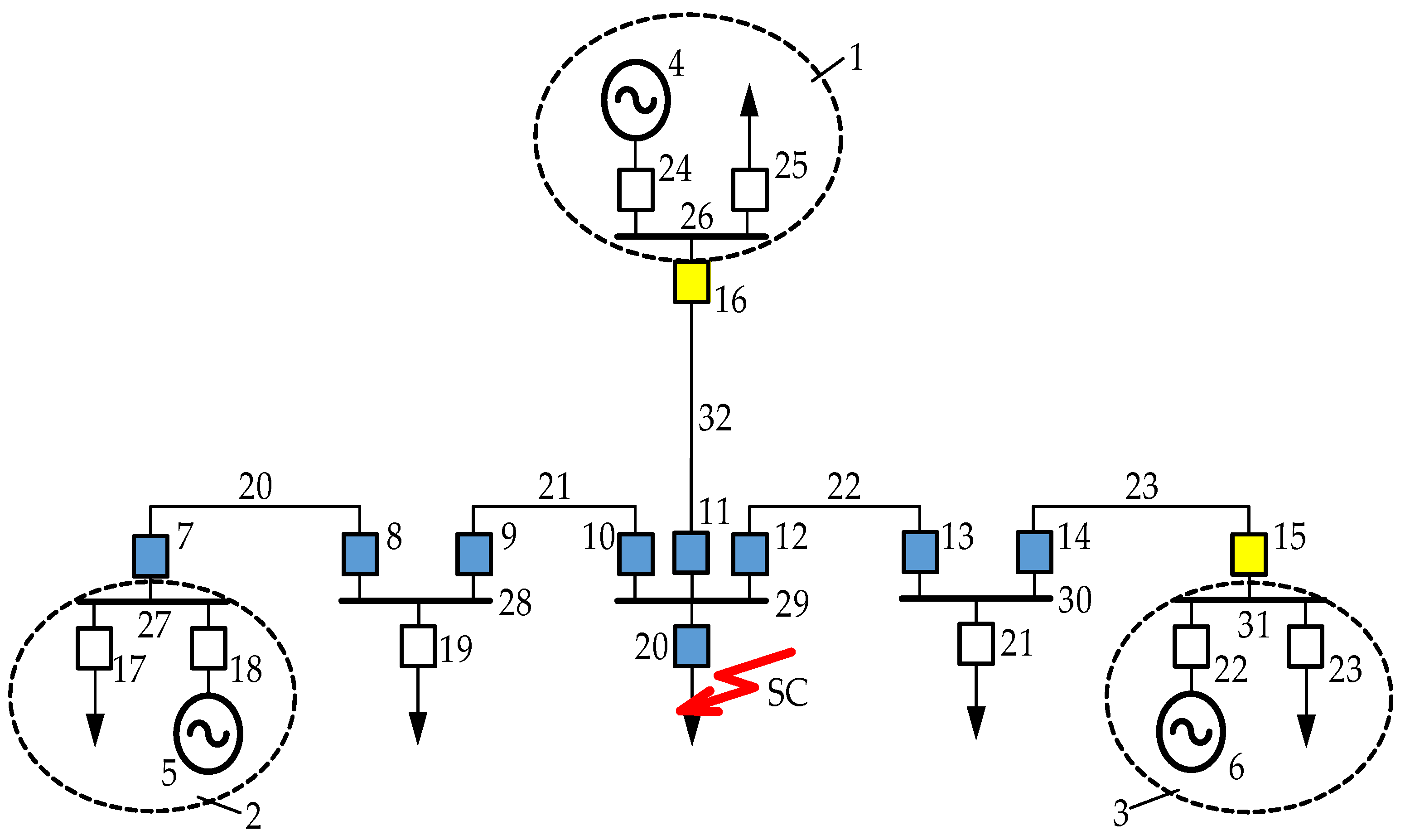
2.2. Managing Emergency-Balanced Network Breakdown
Method of Emergency Management of Network Breakdown into Balanced Energy Districts
- Limit short circuit supply currents;
- Prevent violations of the stability of parallel operation with the occurrence of asynchronous modes;
- Eliminate impact moments on the shafts of synchronous machines;
- Eliminate the need to coordinate the protection of the automation of the external network and objects with low generation.
- (1)
- With the output of significant power to the external network along the cross-section (Pout = Pset).
- (2)
- Without issuing significant power to the external network (Pout = 0).
- (3)
- With significant power consumption from the external network (Pout = −Pset).
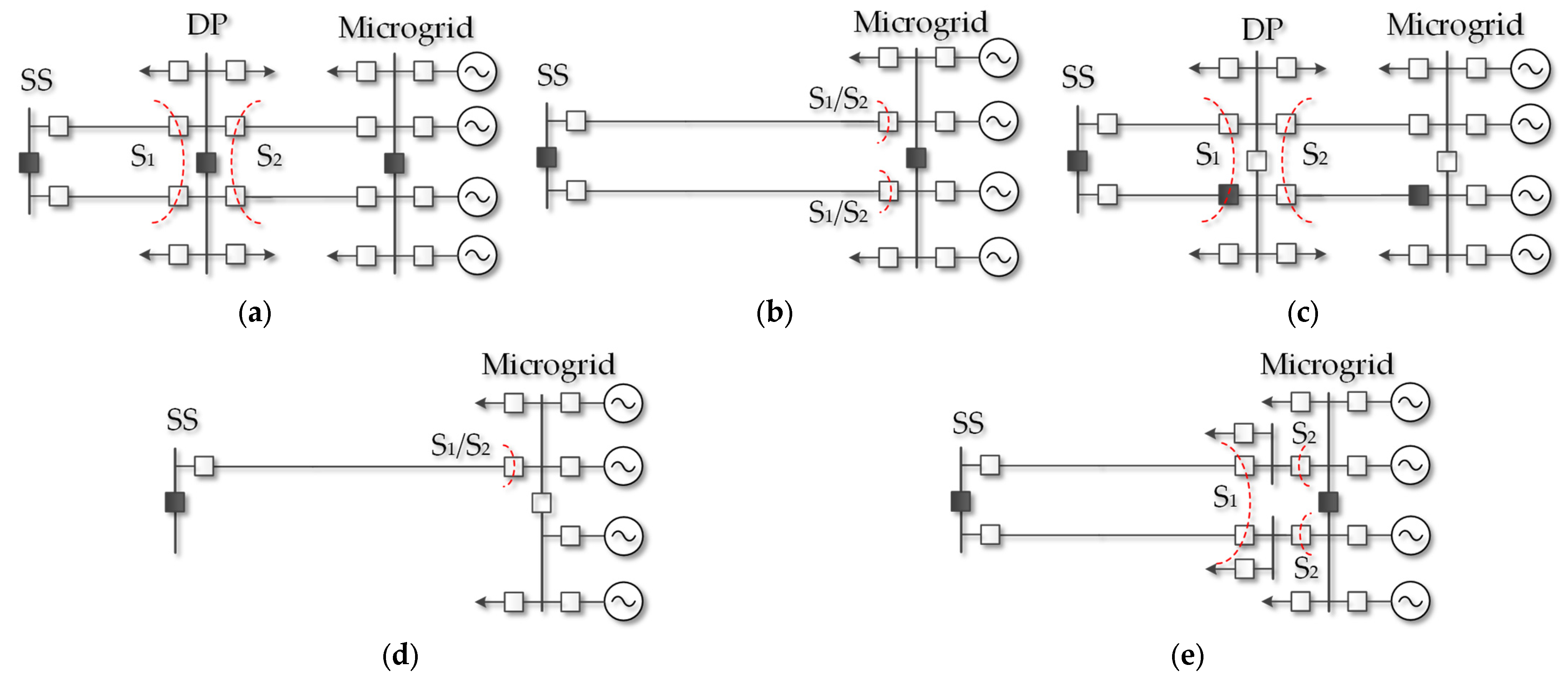
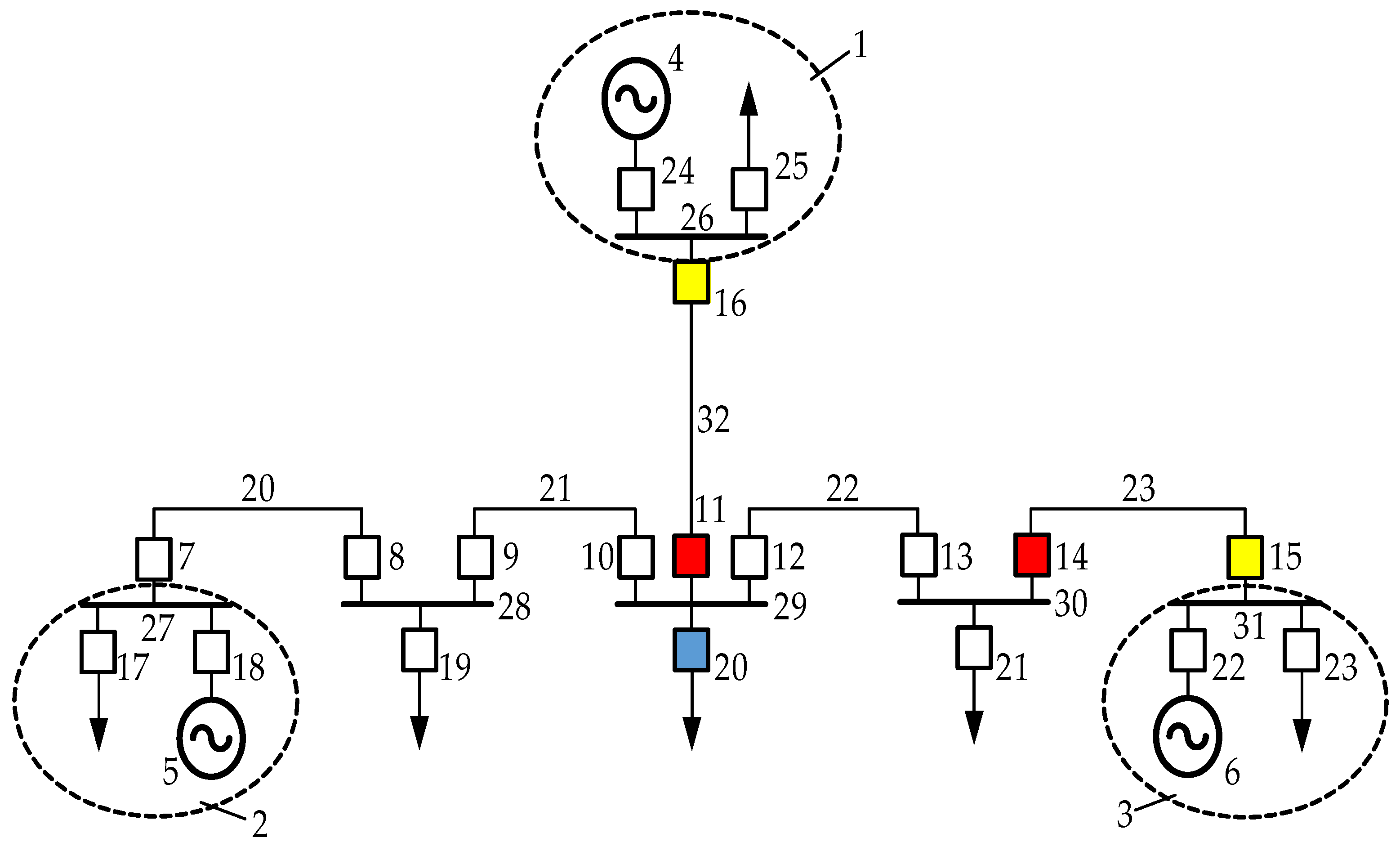
2.3. Decentralized Management of the Restoration of the Integrity and Normal Operation of the Distributed Power Grid after Its Emergency or Emergency Breakdown into Balanced Parts
- In the first stage, a decentralized assembly of network elements is performed that does not require synchronization of the parts of the network that they combine.
- The second stage provides decentralized synchronization of separated parts of the network on remote network switches.
- Identification of a quasi-established post-emergency mode in each active part of the network;
- Identification of the class of active and reactive power balances in separated parts of the network;
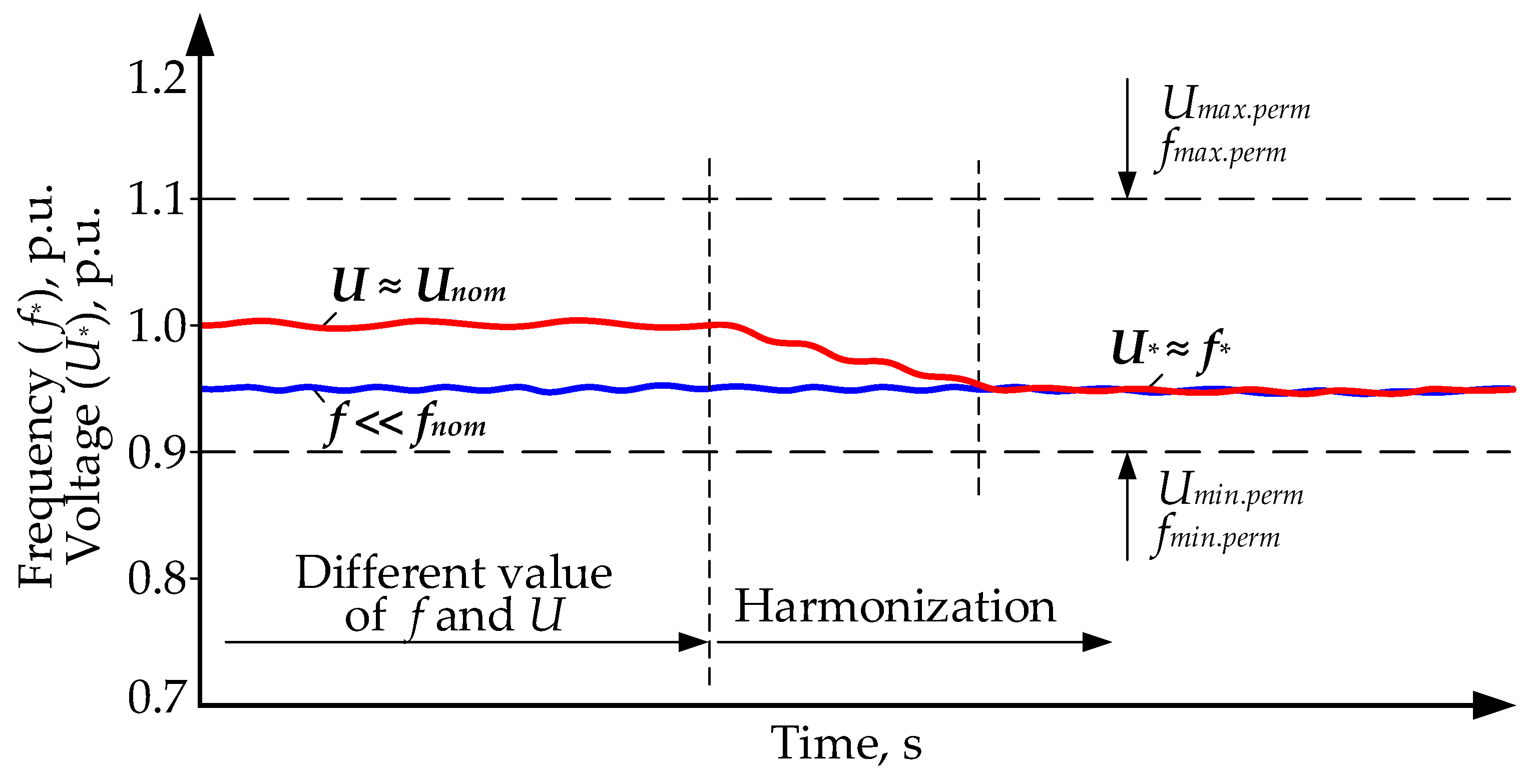
- Frequency and voltage harmonization in separated parts of the network;
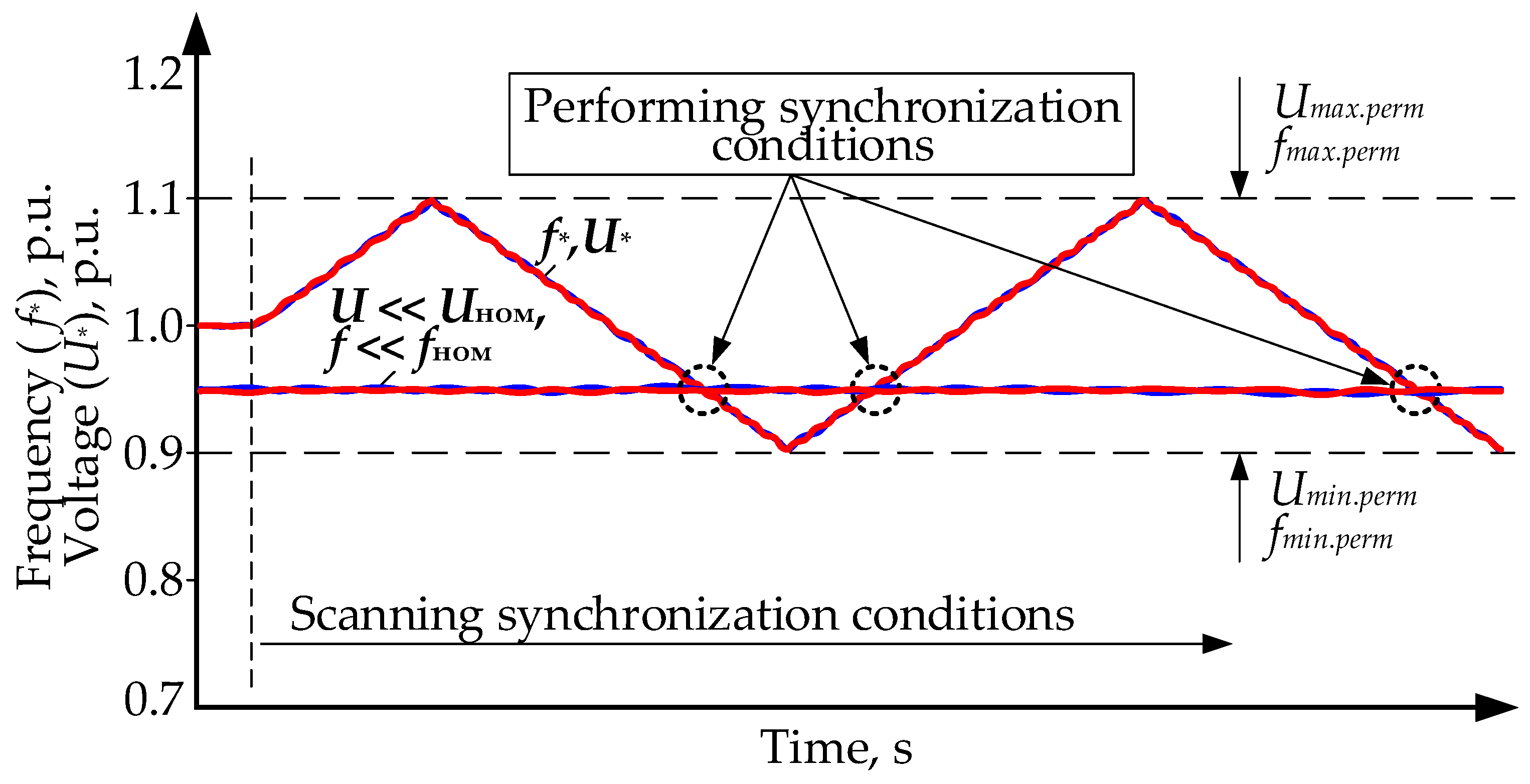
- Scanning of synchronization conditions in parts of the grid with active and reactive power balances, as well as in separated power plants by low-frequency coordinated (harmonized) frequency and voltage regulation;
- Enabling network switching devices that detect whether synchronization conditions are met;
- Identification of signs of its occurrence at power plants that are switched on for parallel operation, with the termination of scanning synchronization conditions and the transition to normal voltage and frequency regulation.
2.3.1. Classes of Active and Reactive Power Balances in Split Parts of the Network
2.3.2. Frequency and Voltage Harmonization
2.3.3. Scanning Synchronization Conditions
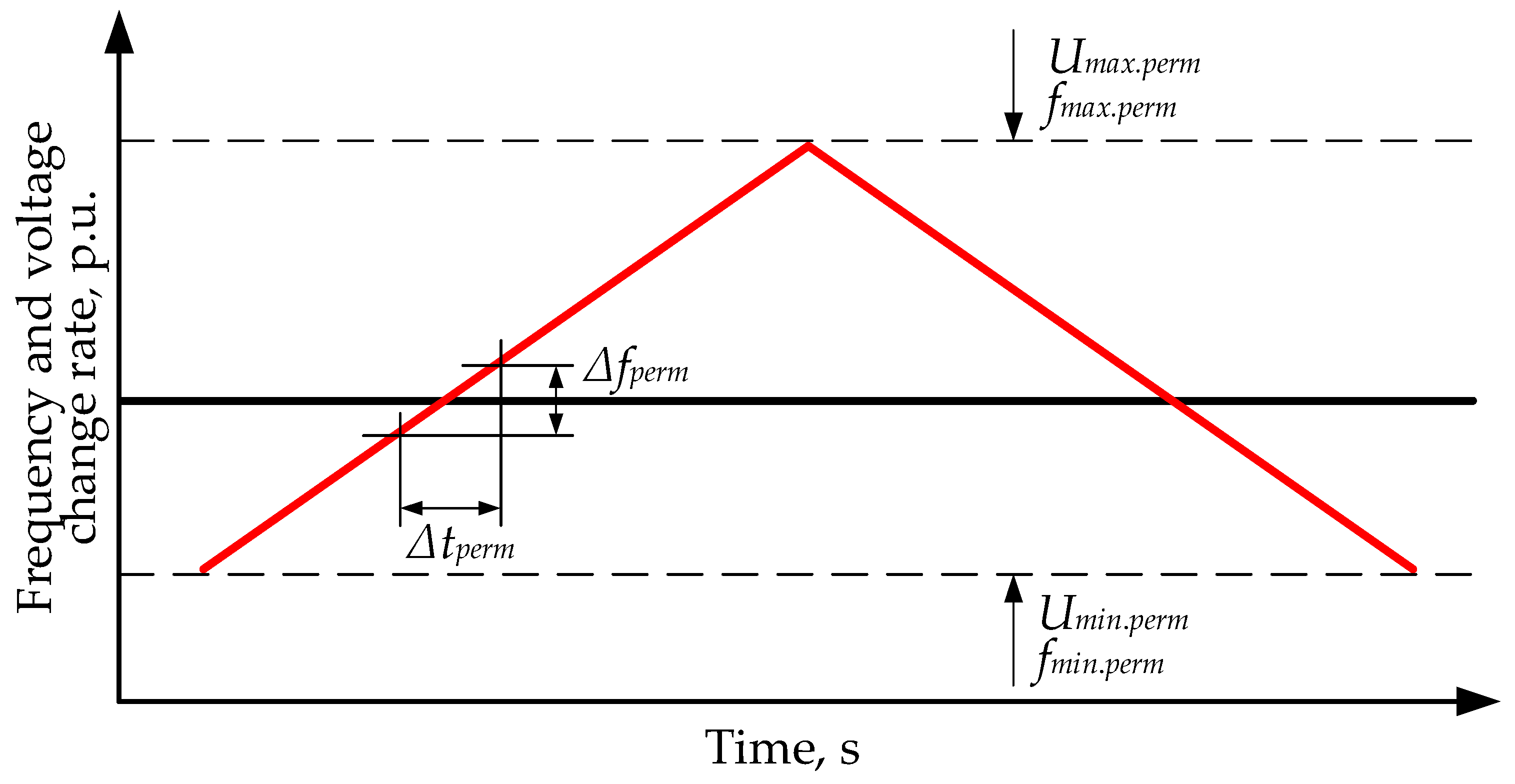
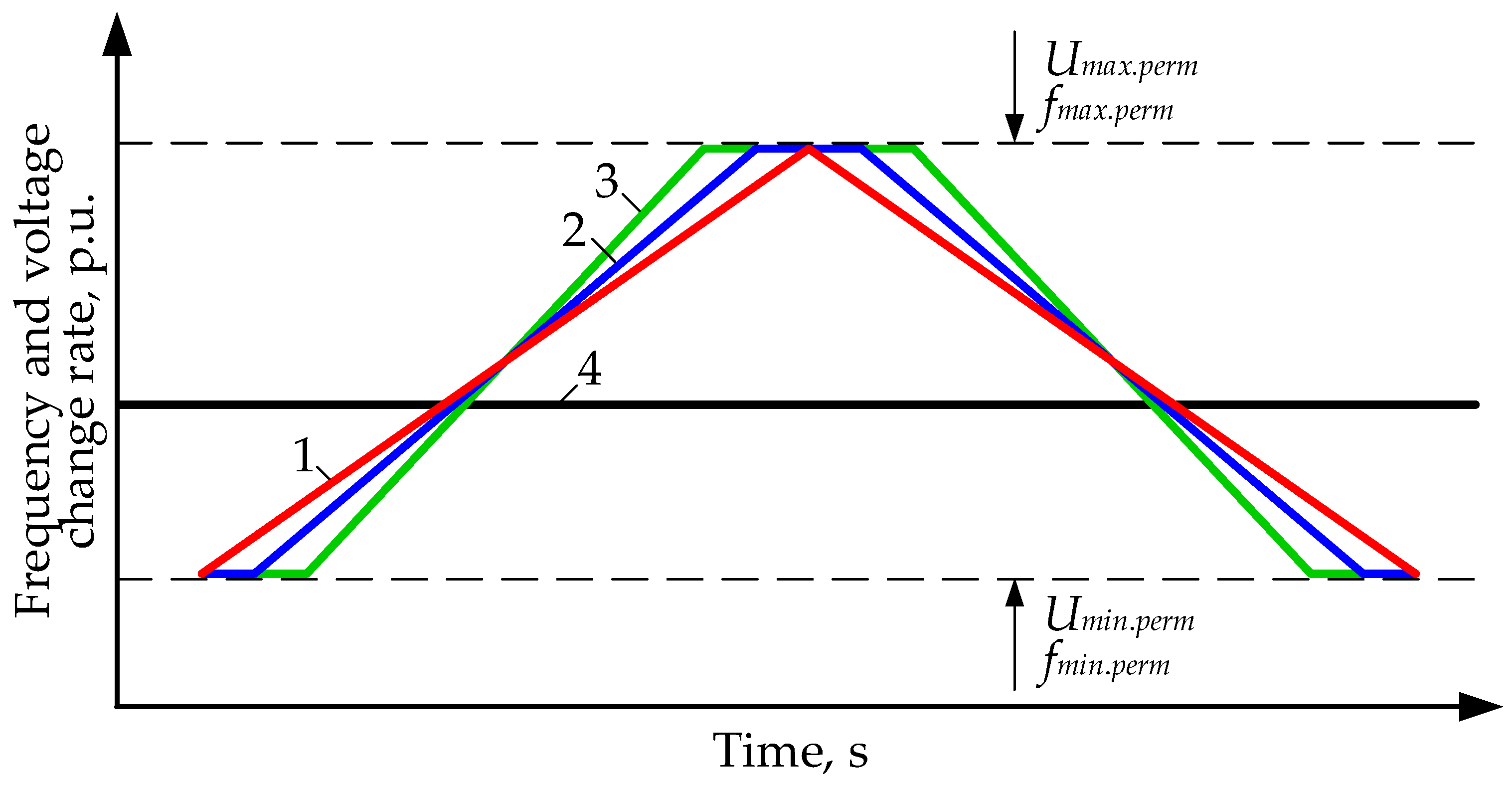
2.3.4. Critical Parameters of the Synchronization Condition Scanning Process
- Consistent frequency and voltage range;
- Form of periodic frequency and voltage changes during scanning;
- Frequency (period) of frequency and voltage changes during scanning;
- Phase shift of changes when simultaneously scanning generators in different separated parts of the network.
- The network is built in a decentralized manner up to cross-sections that require synchronization;
- Synchronization of emergency-separated active parts of the electric network is carried out in a decentralized manner using switching devices of parts of the electric network in conditions for creating consistent periodic low-frequency changes in voltage and frequency with a different frequency for each separated part;
- Switching on parallel operation of parts of the network is recorded, switching from regulating the frequency and voltage on generators to regulating the flow over the cross-section connecting previously separated parts, or to regulating the frequency and voltage in the combined network;
- The excitation and power regulators of the generator of lower priority in the group of generators scanning synchronization conditions are switched to the mode of maintaining constant active and reactive power until the specified time for restoring the integrity of the electrical network expires;
- After the specified time for restoring the integrity of the electrical network on the regulators of all generators, the normal mode of frequency and power regulation in the electrical network with many distributed generators is restored.
3. Research Tools and Methods
- Power and switching equipment;
- Measuring and recording devices and apparatuses;
- Control system.
4. Results and Discussion
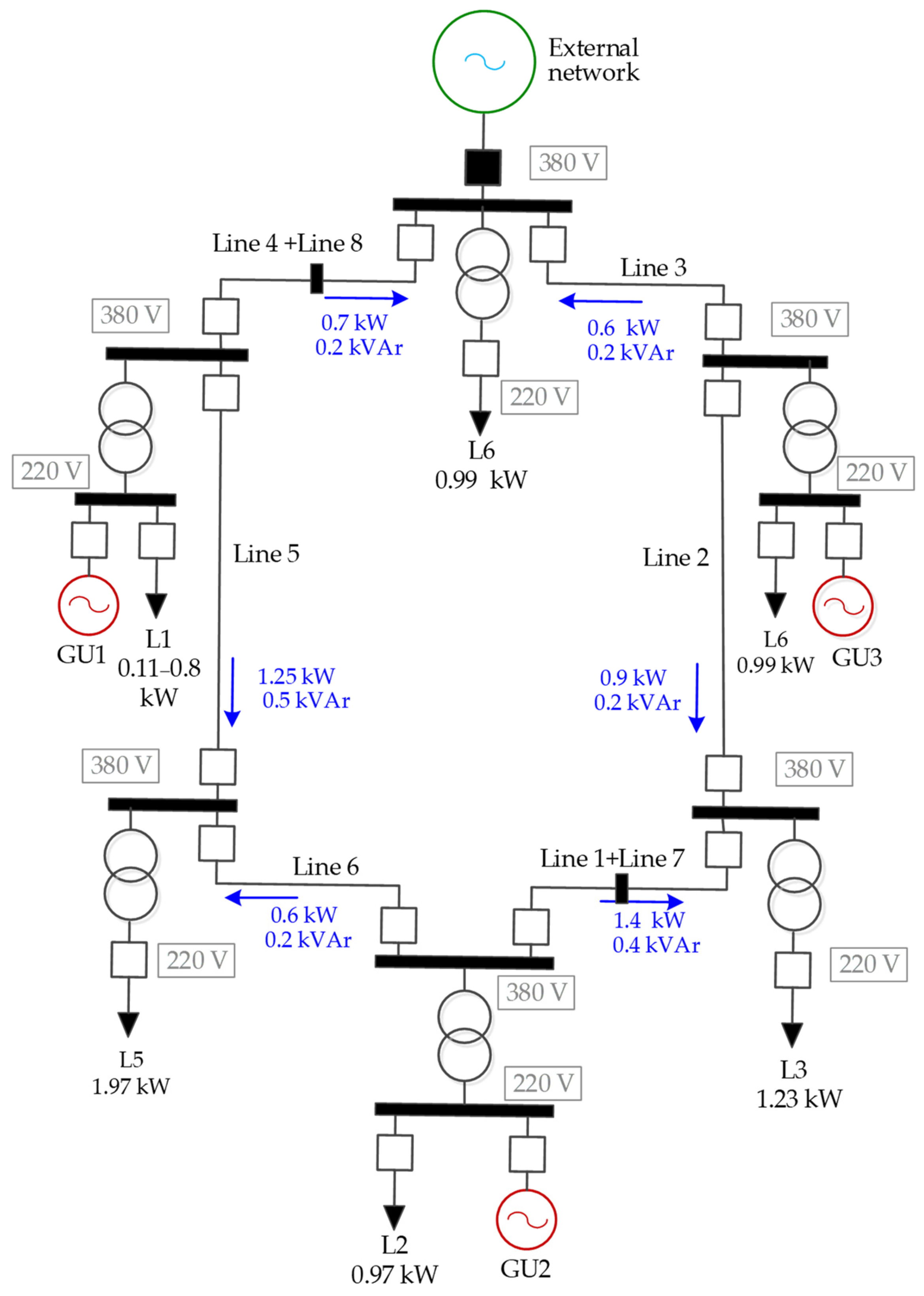
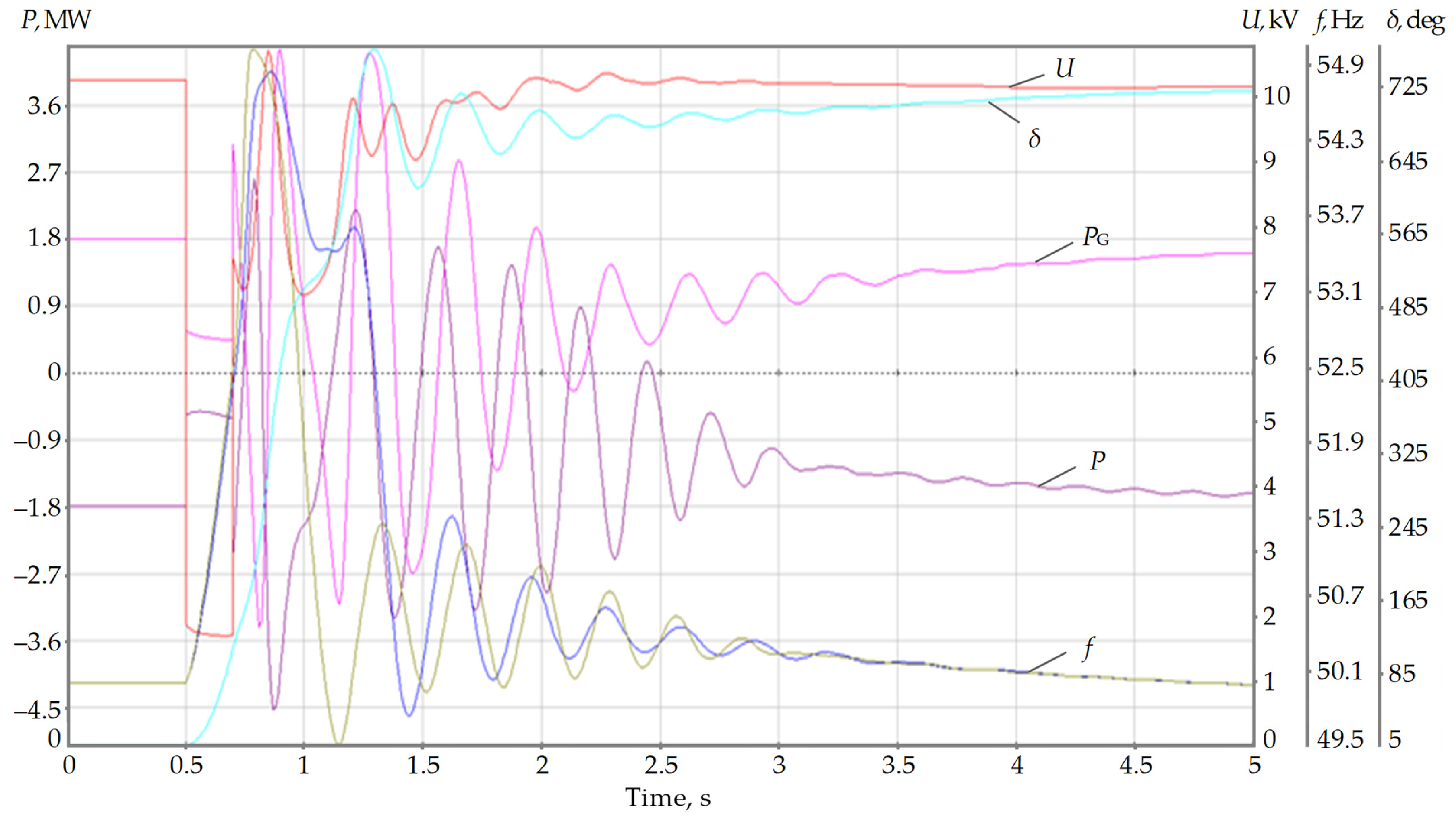
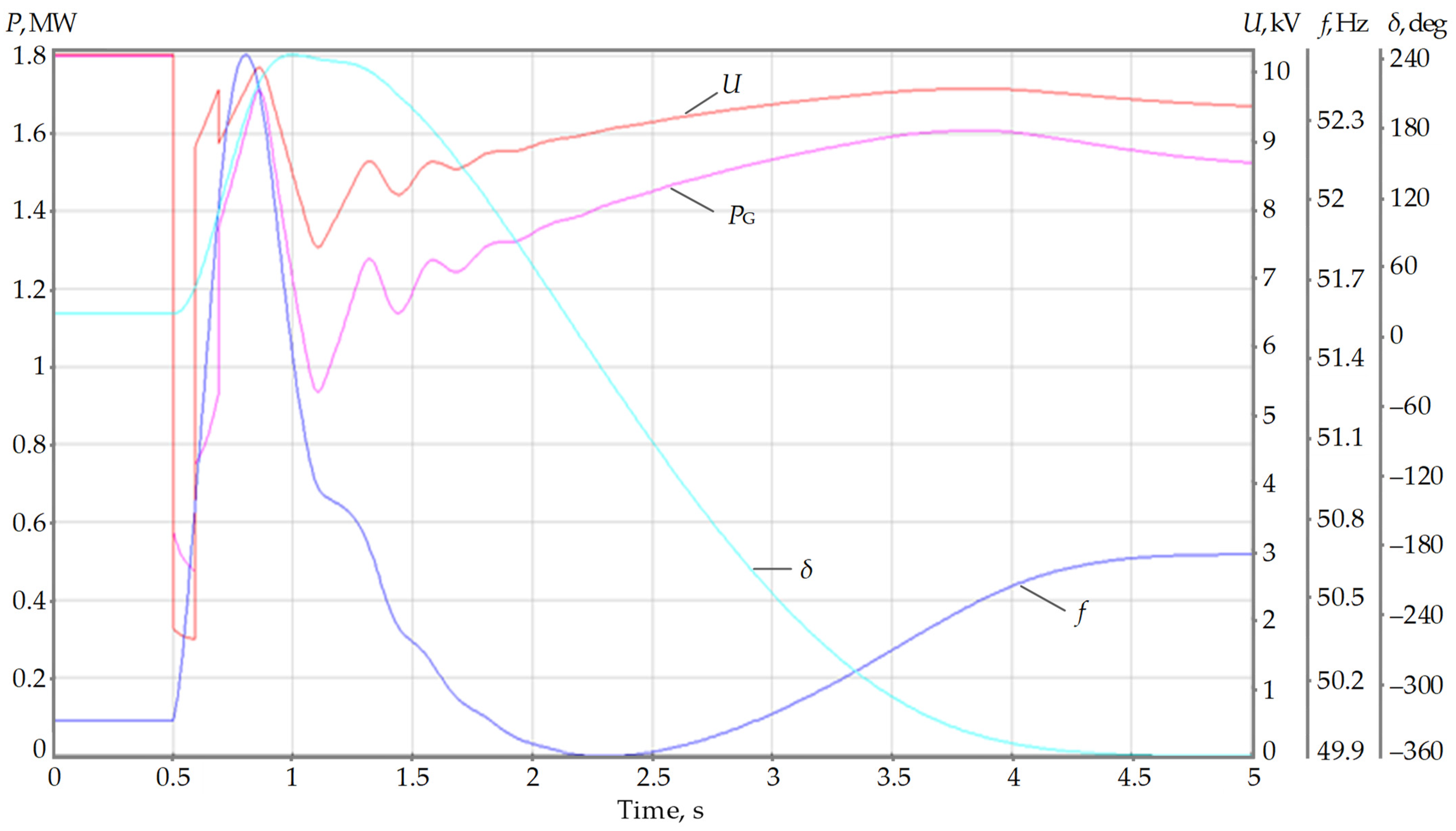
4.1. Processes in Case of Emergency-Balanced Breakdown of the Electric Grid
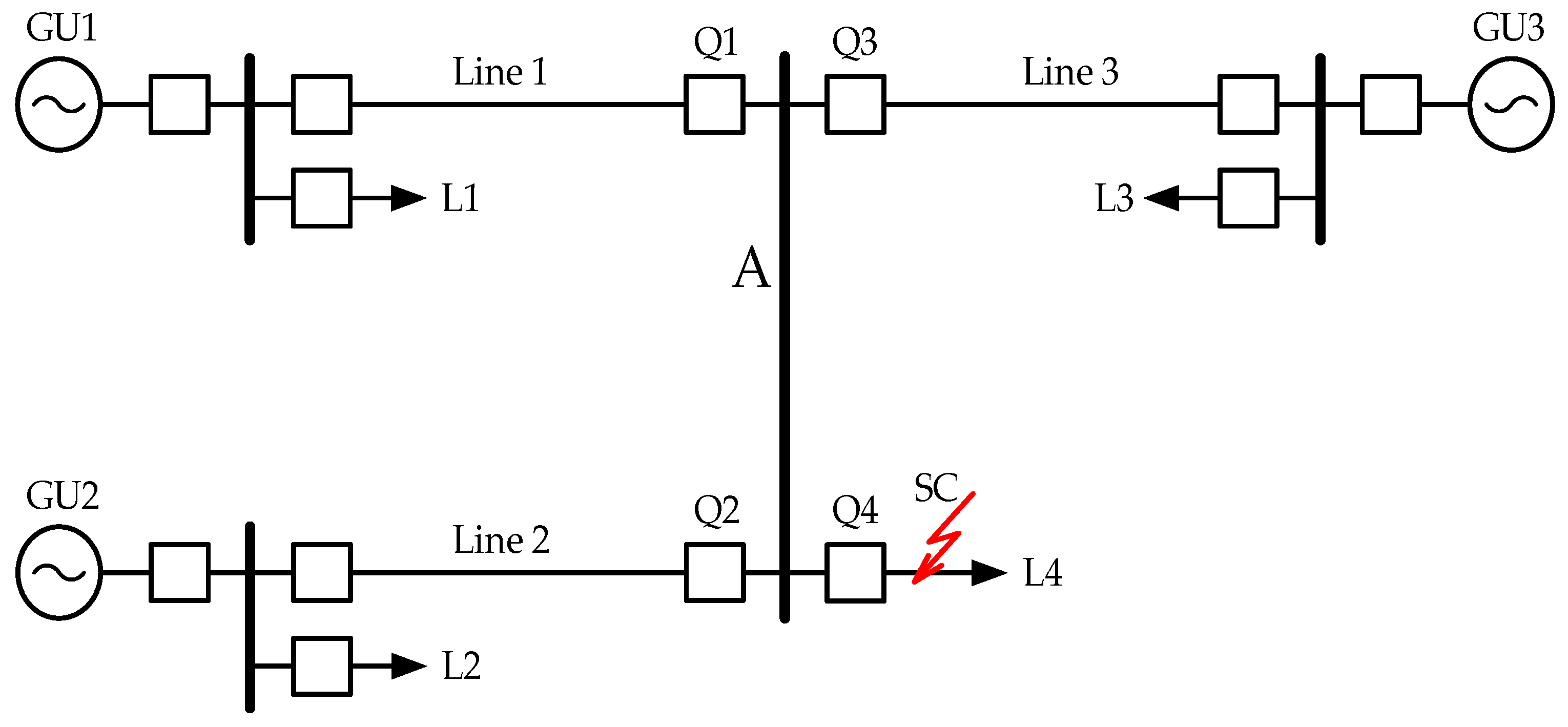
4.2. Experimental Study of Decentralized Emergency Management of the Breakdown into Balanced Parts, Restoration of the Integrity, and Normal Operation of the Electric Network with Distributed Generation on a Physical Model of the Power System
- Starting generators GU1–GU3 by switching on generator switches to power local loads. At this stage, all generators operate independently, and therefore, the controllers of all generators operate in the mode of maintaining the frequency and voltage setpoints on the generator buses.
- Start-up of the AR with detection of synchronism of switches Q1–Q3. After synchronizing the generators with each other, it is necessary to switch GU2 and GU3 to the cross-section power flow control mode (the original scheme with the normal mode is assembled).
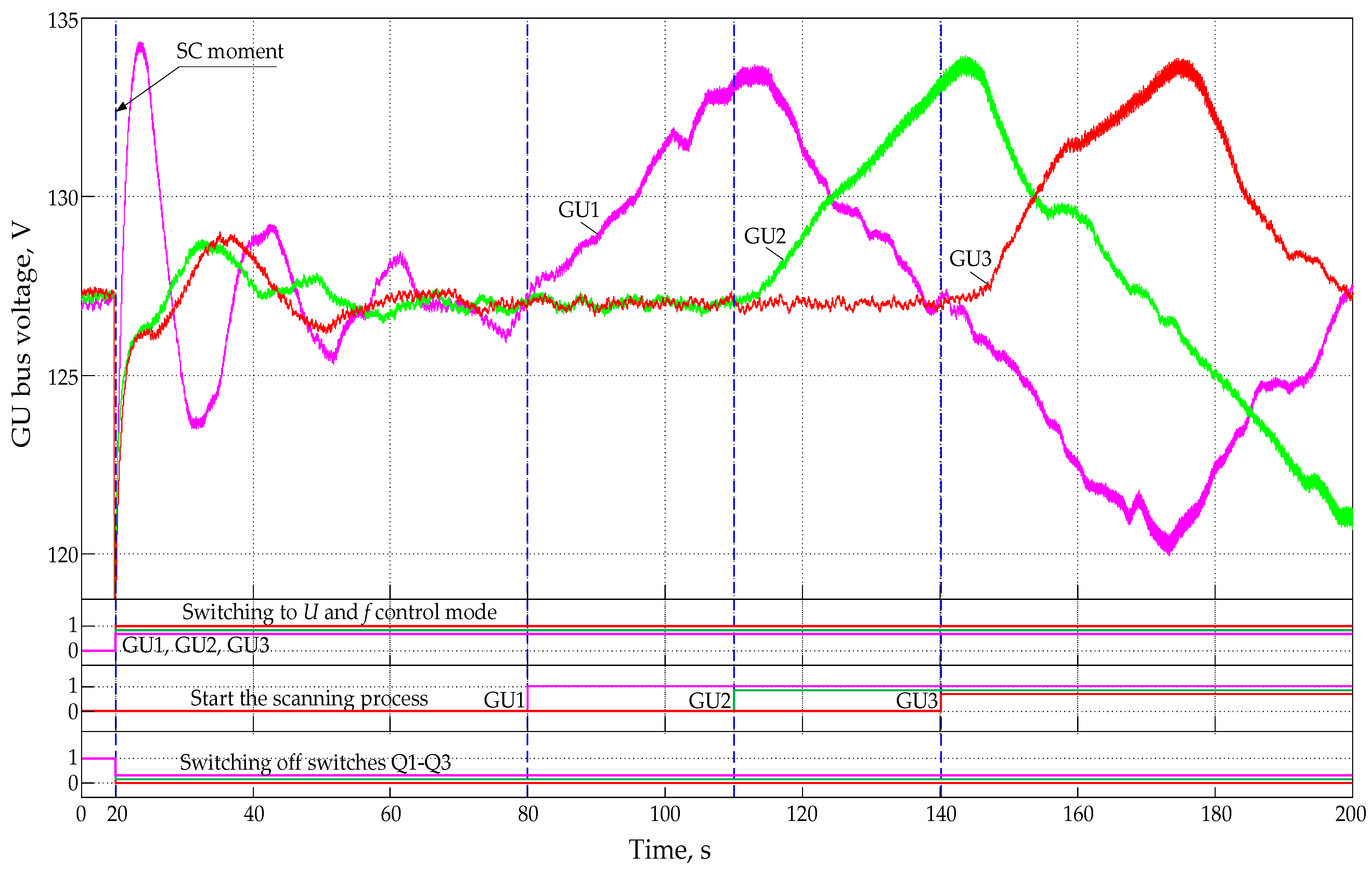
- Create a three-phase SC mode by manually turning on the Q4 switch to short-circuit. As a result of such a disturbance, the built-in protective functions in the AR devices should turn off switches Q1–Q3, generators GU2 and GU3 should switch to the frequency and voltage control mode, and, after the specified time exposures (60, 90 and 120 s, respectively), the ‘scanning’ process starts (completed successfully, Figure 13).
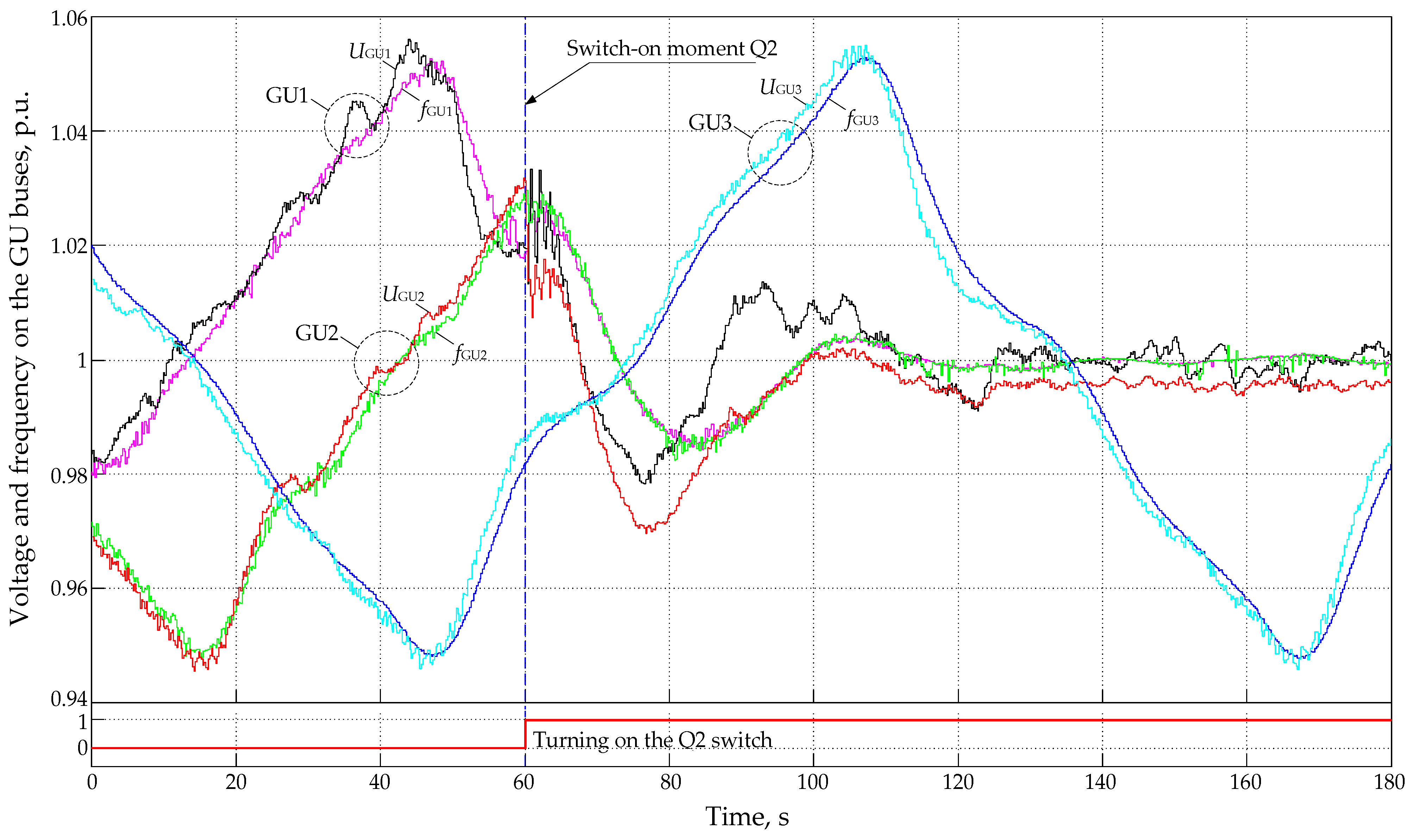
- After disconnecting the SC, the Q1 switch should turn on, which will cause A voltage to appear on the A-bus (Figure 9). During the scanning process, conditions for synchronization are created on the switch Q2 (for example), and it turns on. Fixing the electromechanical process, GU1 and GU2 must stop the scanning process and switch to the initial control mode: GU1—the mode of secondary frequency and voltage regulation, and GU2—in the mode of issuing a given power or maintaining a given cross-section flow. In this mode, the frequency in the combined network is maintained at 50 Hz. GU3 continues the scanning process (completed successfully, Figure 14).
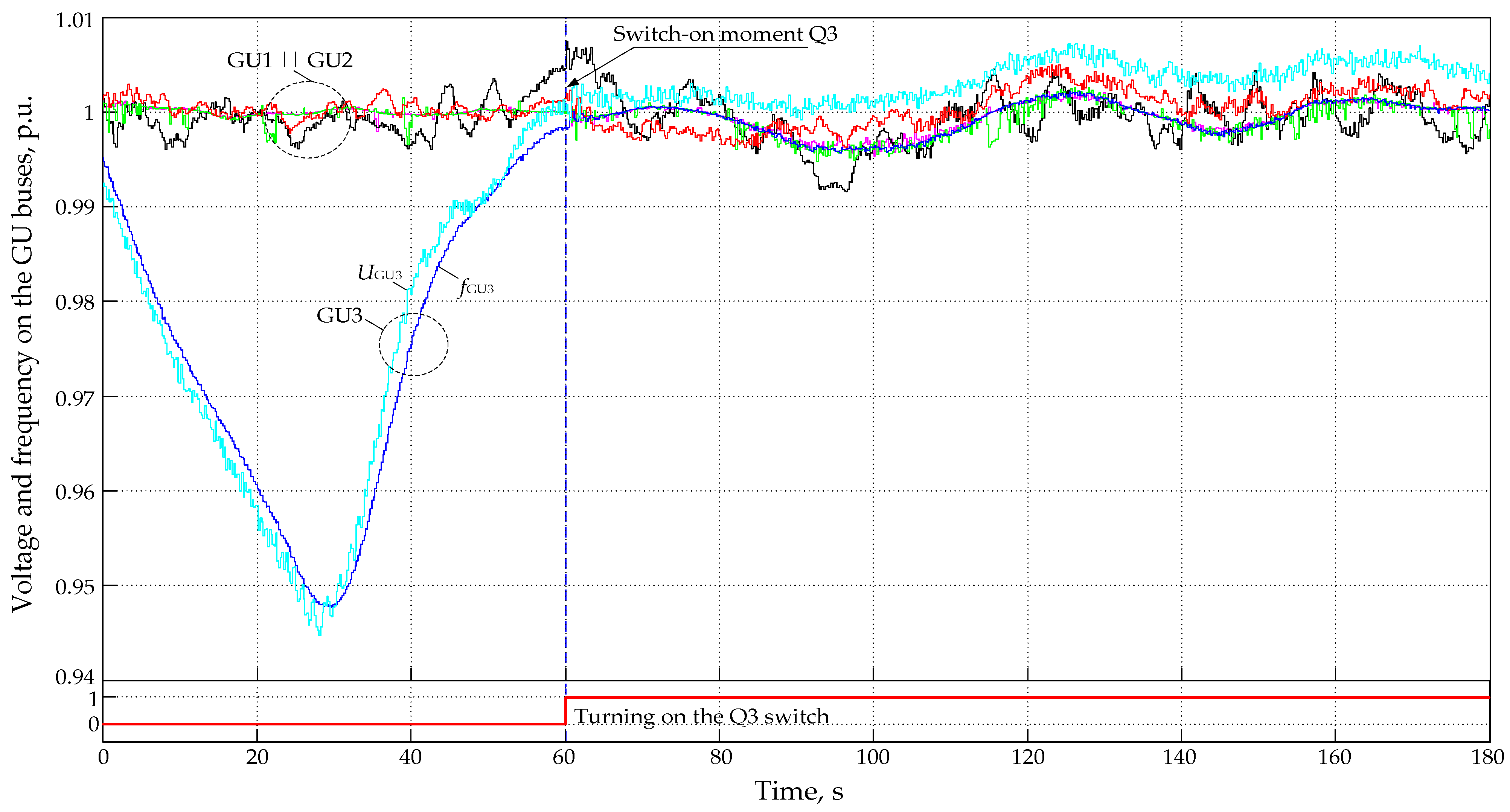
- Finally, during the scanning process of GU3, synchronization conditions are created on the Q3 switch, and it turns on. Fixing the electromechanical process, GU3 must stop the scanning process and switch to the initial control mode—the mode of maintaining the set power or power flow over the cross section. Automatic restoration of the normal network operation has been completed (completed successfully, Figure 15).
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Voropay, N.I.; Keiko, A.V.; Saneev, B.G.; Senderov, S.M.; Stennikov, V.A. Trends in the development of centralized and distributed energy. Energy Econ. Technol. Ecol. 2005, 7, 2–11. (In Russian) [Google Scholar]
- Ahlqvist, V.; Holmberg, P.; Tangerås, T. A survey comparing centralized and decentralized electricity markets. Energy Strateg. Rev. 2022, 40, 100812. [Google Scholar] [CrossRef]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part II: Technologies, Standards, and Tools for Building Multi-agent Systems. IEEE Trans. Power Syst. 2007, 22, 1753–1759. [Google Scholar] [CrossRef]
- Altin, N.; Eyimaya, S.E.; Nasiri, A. Multi-Agent-Based Controller for Microgrids: An Overview and Case Study. Energies 2023, 16, 2445. [Google Scholar]
- Yao, R.; Hu, Y.; Varga, L. Applications of Agent-Based Methods in Multi-Energy Systems—A Systematic Literature Review. Energies 2023, 16, 2456. [Google Scholar] [CrossRef]
- Gomez-Sanz, J.; Garcia-Rodriguez, S.; Cuartero-Soler, N.; Hernandez-Callejo, L. Reviewing Microgrids from a Multi-Agent Systems Perspective. Energies 2014, 7, 3355–3382. [Google Scholar]
- Ma, Z.; Schultz, M.J.; Christensen, K.; Værbak, M.; Demazeau, Y.; Jørgensen, B.N. The Application of Ontologies in Multi-Agent Systems in the Energy Sector: A Scoping Review. Energies 2019, 12, 3200. [Google Scholar] [CrossRef]
- Dou, C.-X.; Liu, B. Multi-Agent Based Hierarchical Hybrid Control for Smart Microgrid. IEEE Trans. Smart Grid 2013, 4, 771–778. [Google Scholar] [CrossRef]
- Dou, C.; Yue, D.; Li, X.; Xue, Y. MAS-Based Management and Control Strategies for Integrated Hybrid Energy System. IEEE Trans. Ind. Inform. 2016, 12, 1332–1349. [Google Scholar] [CrossRef]
- Abdulmohsen, A.M.; El-Sharkawy, M.A.; Omran, W.A. Power management in islanded microgrids using multi-agent systems. In Proceedings of the 2016 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Ljubljana, Slovenia, 9–12 October 2016. [Google Scholar]
- Nguyen, T.-L.; Wang, Y.; Tran, Q.-T.; Caire, R.; Xu, Y.; Besanger, Y. Agent-based Distributed Event-Triggered Secondary Control for Energy Storage System in Islanded Microgrids—Cyber-Physical Validation. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 11–14 June 2019. [Google Scholar]
- He, S.; Zong, X. Multiagent-based Sampled-data Frequency Control of Microgrid with Additive Noise. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar]
- Cintuglu, M.H.; Mohammed, O.A. Multiagent-based decentralized operation of microgrids considering data interoperability. In Proceedings of the 2015 IEEE International Conference on Smart Grid Communications (SmartGridComm), Miami, FL, USA, 2–5 November 2015. [Google Scholar]
- Kumar Nunna, H.S.V.S.; Doolla, S. Multiagent-Based Distributed-Energy-Resource Management for Intelligent Microgrids. IEEE Trans. Ind. Electron 2013, 60, 1678–1687. [Google Scholar] [CrossRef]
- Dimeas, A.L.; Hatziargyriou, N.D. Operation of a Multiagent System for Microgrid Control. IEEE Trans. Power Syst. 2005, 20, 1447–1455. [Google Scholar] [CrossRef]
- Eddy, Y.S.F.; Gooi, H.B.; Chen, S.X. Multi-Agent System for Distributed Management of Microgrids. IEEE Trans. Power Syst. 2015, 30, 24–34. [Google Scholar] [CrossRef]
- Ren, F.; Zhang, M.; Soetanto, D.; Su, X. Conceptual Design of A Multi-Agent System for Interconnected Power Systems Restoration. IEEE Trans. Power Syst. 2012, 27, 732–740. [Google Scholar] [CrossRef]
- Bulatov, Y.N.; Shumansky, E.K. Simulation of a multi-agent network voltage control system with distributed generation units. Proc. Bratsk State Univ. Nat. Eng. Sci. Ser. 2019, 2, 92–95. (In Russian) [Google Scholar]
- Bulatov, Y.N.; Shumansky, E.K. Multi-agent voltage regulation system in electric networks with small distributed generation units. Proc. Bratsk State Univ. Nat. Eng. Sci. Ser. 2021, 1, 141–145. (In Russian) [Google Scholar]
- Bulatov, Y.N.; Kryukov, A.V. A multi-agent control system of distributed generation plants. In Proceedings of the 2017 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), St. Petersburg, Russia, 16–19 May 2017. [Google Scholar]
- Islam, S.R.; Sutanto, D.; Muttaqi, K.M. A decentralized multi-agent based voltage control for catastrophic disturbances in a power system. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013. [Google Scholar]
- Sheng, G.; Jiang, X.; Duan, D.; Tu, G. Framework and implementation of secondary voltage regulation strategy based on multi-agent technology. Int. J. Electr. Power Energy Syst. 2009, 31, 67–77. [Google Scholar] [CrossRef]
- Panasetsky, D.A.; Voropai, N.I. A Multi-agent approach to coordination of different emergency control devices against voltage collapse. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009. [Google Scholar]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M.; Aung, H.N. Multiagent System for Real-Time Operation of a Microgrid in Real-Time Digital Simulator. IEEE Trans. Smart Grid 2012, 3, 925–933. [Google Scholar] [CrossRef]
- Davidson, E.M.; McArthur, S.D.J.; McDonald, J.R.; Cumming, T.; Watt, I. Automating the Analysis and Management of Power System Data using Multi-agent Systems Technology. In Applications and Innovations in Intelligent Systems XII; Macintosh, A., Ellis, R., Allen, T., Eds.; Springer: London, UK, 2005; pp. 151–164. [Google Scholar]
- Davidson, E.M.; McArthur, S.D.J.; McDonald, J.R.; Cumming, T.; Watt, I. Applying Multi-Agent System Technology in Practice: Automated Management and Analysis of SCADA and Digital Fault Recorder Data. IEEE Trans. Power Syst. 2006, 21, 559–567. [Google Scholar] [CrossRef]
- Mukatov, B.; Kardzhaubayev, N.; Fishov, A. Features of providing reliable power supply in isolated power grids with distributed generation. Proc. Russ. High. Sch. Acad. Sci. 2015, 4, 94–104. (In Russian) [Google Scholar]
- Mukatov, B.; Efremov, I.; Fishov, A. Model of an extended reflecting object consisting of a small number of points. Proc. Russ. High. Sch. Acad. Sci. 2014, 4, 90–103. (In Russian) [Google Scholar]
- Fishov, A.G.; Mukatov, B.B.; Marchenko, A.I. Method for Emergency Control of the Mode of Parallel Operation of Synchronous Generators in Electrical Networks. RU Patent 2662728, 30 July 2018. (In Russian). [Google Scholar]
- Fishov, A.G.; Ghulomzoda, A.H.; Ivkin, E.S.; Semendyaev, R.Y. Synchronization of Microgrid with the energy system and with other Microgrid in normal and post-emergency modes using different interconnection schemes. Relay Prot. Autom. 2021, 2, 32–42. (In Russian) [Google Scholar]
- Fishov, A.; Osincev, A.; Gulomzoda, A. Synchronization of parts of electrical networks with distributed energy sources after separation. Electr. Stn. 2022, 11, 21–29. (In Russian) [Google Scholar]
- Fishov, A.; Ghulomzoda, A.; Kasobov, L. Decentralised reconfiguration of a Microgrid electrical network using reclosers. Proc. Irkutsk State Tech. Univ. 2020, 24, 382–395. (In Russian) [Google Scholar] [CrossRef]
- Ghulomzoda, A.; Gulakhmadov, A.; Fishov, A.; Safaraliev, M.; Chen, X.; Rasulzoda, K.; Gulyamov, K.; Ahyoev, J. Recloser-Based Decentralized Control of the Grid with Distributed Generation in the Lahsh District of the Rasht Grid in Tajikistan, Central Asia. Energies 2020, 13, 3673. [Google Scholar] [CrossRef]
- Azorin, A.Y. Automatic synchronization of “islands” at restoration of power supply systems with distributed generation. iPolytech J. 2018, 22, 83–94. (In Russian) [Google Scholar] [CrossRef]
- Bellini, A.; Bifaretti, S.; Giannini, F. A Robust Synchronization Method for Centralized Microgrids. IEEE Trans. Ind. Appl. 2015, 51, 1602–1609. [Google Scholar] [CrossRef]
- Asanov, M.S.; Safaraliev, M.K.; Zhabudaev, T.Z.; Asanova, S.M.; Kokin, S.E.; Dmitriev, S.A.; Obozov, A.J.; Ghulomzoda, A.H. Algorithm for calculation and selection of micro hydropower plant taking into account hydrological parameters of small watercourses mountain rivers of Central Asia. Int. J. Hydrog. Energy 2021, 46, 37109–37119. [Google Scholar] [CrossRef]
- Ghulomzoda, A.; Safaraliev, M.; Matrenin, P.; Beryozkina, S.; Zicmane, I.; Gubin, P.; Gulyamov, K.; Saidov, N. A Novel Approach of Synchronization of Microgrid with a Power System of Limited Capacity. Sustainability 2021, 13, 13975. [Google Scholar]
- Laaksonen, H.; Kauhaniemi, K. Synchronized re-connection of island operated LV microgrid back to utility grid. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010. [Google Scholar]
- Choi, K.-Y.; Kim, S.-I.; Jung, S.-H.; Kim, R.-Y. Selective frequency synchronization technique for fast grid connection of islanded microgrid using prediction method. Int. J. Electr. Power Energy Syst. 2019, 111, 114–124. [Google Scholar] [CrossRef]
- Shah, S.; Sun, H.; Nikovski, D.; Zhang, J. VSC-Based Active Synchronizer for Generators. IEEE Trans. Energy Convers. 2018, 33, 116–125. [Google Scholar] [CrossRef]
- Cho, C.; Jeon, J.-H.; Kim, J.-Y.; Kwon, S.; Park, K.; Kim, S. Active Synchronizing Control of a Microgrid. IEEE Trans. Power Electron. 2011, 26, 3707–3719. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, W.; Cai, J.; Cai, T.; Xu, Z.; Yan, N. A synchronization control method for micro-grid with droop control. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015. [Google Scholar]
- Balaguer, I.J.; Lei, Q.; Yang, S.; Supatti, U.; Peng, F.Z. Control for Grid-Connected and Intentional Islanding Operations of Distributed Power Generation. IEEE Trans. Ind. Electron. 2011, 58, 147–157. [Google Scholar] [CrossRef]
- Litwin, M.; Zielinski, D.; Gopakumar, K. Remote Micro-Grid Synchronization without Measurements at the Point of Common Coupling. IEEE Access 2020, 8, 212753–212764. [Google Scholar] [CrossRef]
- Ghulomzoda, A.; Safaraliev, M.; Lyukhanov, E. Modified Method for Synchronizing Microgrid with an External Isolated Power System. Electrotech. Syst. Complexes 2021, 52, 72–80. (In Russian) [Google Scholar] [CrossRef]
- Fishov, A.G.; Gulomzoda, A.K. Method for Remote Synchronisation and Restoration of Normal Mode of Abnormally Divided Electrical Network with Generators. RU Patent 2752693, 30 July 2021. (In Russian). [Google Scholar]
- Multi-Functional Emergency Automation System. Available online: http://www.iaes.ru (accessed on 16 May 2023).
- Gezha, E.N.; Glazyrin, V.E.; Glazyrin, G.V.; Ivkin, E.S.; Marchenko, A.I.; Semendyaev, R.Y.; Serdyukov, O.V.; Fishov, A.G. System automation for integration of local power supply systems with synchronous small-scale generation into electric networks. Relayer 2018, 32, 24–31. [Google Scholar]
- Fishov, A.G.; Osintsev, A.A. Method for Decentralized Synchronization and Restoration of Normal Operation of an Emergency-Separated Electric Network with Generators. RU Patent 2784610, 28 November 2022. (In Russian). [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation of the Status Class | Power Generation and Consumption Ratio | Network Mode Parameters After Breakup | |
|---|---|---|---|
| K1 | Balance of active and reactive power | f ≈ fnom | U ≈ Unom |
| K2 | Balance of active and excess reactive power | f ≈ fnom | U >> Unom |
| K3 | Active power balance and reactive power deficit | f ≈ fnom | U << Unom |
| K4 | Excess of active and reactive power balance | f >> fnom | U ≈ Unom |
| K5 | Active power deficit and reactive power balance | f << fnom | U ≈ Unom |
| K6 | Excess of active and reactive power | f >> fnom | U >> Unom |
| K7 | Excess of active and deficit of reactive power | f >> fnom | U << Unom |
| K8 | Shortage of active and excess of reactive power | f << fnom | U >> Unom |
| K9 | Shortage of active and reactive power | f << fnom | U << Unom |
| K10 | No power generation | 0 | 0 |
| Parameter | Parameter Name | Unit of Measurement | Synchronous Generators | |
|---|---|---|---|---|
| MT-5-1500 | MK-3-1500 | |||
| Snom | Full power | kVA | 5 | 3 |
| Unom | Rated voltage | V | 230 | 230 |
| Inom | Rated current | A | 12.55 | 7.52 |
| cosφnom | Rated cosφ | - | 0.8 | 0.8 |
| n | Rated speed | rpm | 1500 | 1500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fishov, A.; Osintsev, A.; Ghulomzoda, A.; Marchenko, A.; Kokin, S.; Safaraliev, M.; Dmitriev, S.; Zicmane, I. Decentralized Emergency Control of AC Power Grid Modes with Distributed Generation. Energies 2023, 16, 5607. https://doi.org/10.3390/en16155607
Fishov A, Osintsev A, Ghulomzoda A, Marchenko A, Kokin S, Safaraliev M, Dmitriev S, Zicmane I. Decentralized Emergency Control of AC Power Grid Modes with Distributed Generation. Energies. 2023; 16(15):5607. https://doi.org/10.3390/en16155607
Chicago/Turabian StyleFishov, Alexander, Anatoly Osintsev, Anvari Ghulomzoda, Andrey Marchenko, Sergey Kokin, Murodbek Safaraliev, Stepan Dmitriev, and Inga Zicmane. 2023. "Decentralized Emergency Control of AC Power Grid Modes with Distributed Generation" Energies 16, no. 15: 5607. https://doi.org/10.3390/en16155607
APA StyleFishov, A., Osintsev, A., Ghulomzoda, A., Marchenko, A., Kokin, S., Safaraliev, M., Dmitriev, S., & Zicmane, I. (2023). Decentralized Emergency Control of AC Power Grid Modes with Distributed Generation. Energies, 16(15), 5607. https://doi.org/10.3390/en16155607