
Adaptive Control of a Virtual Synchronous Generator with Multiparameter Coordination


Abstract
:1. Introduction
2. Topology and Mathematical Model of VSG
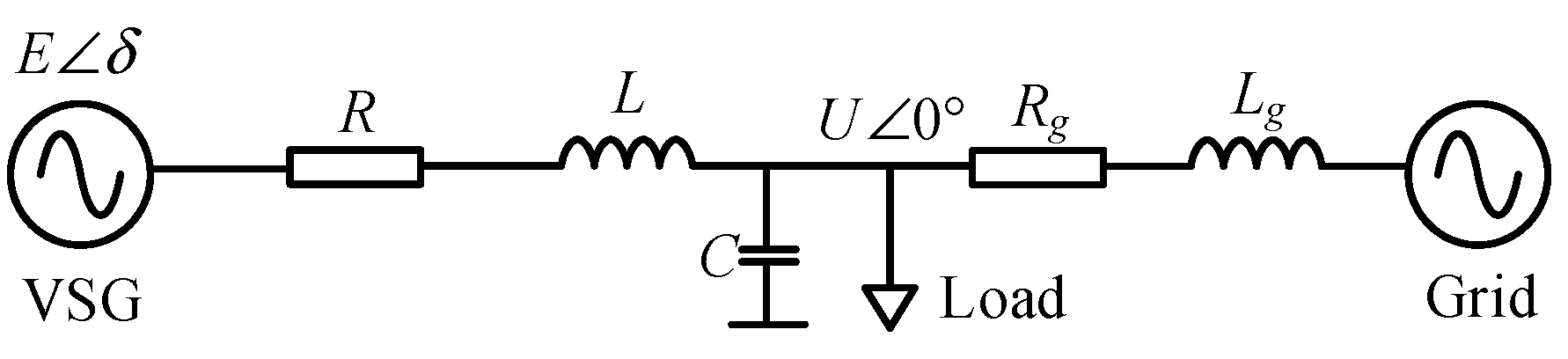
2.1. Topology of VSG
2.2. Mathematical Model of VSG
3. Multiparameter Cooperative Adaptive Control of VSG
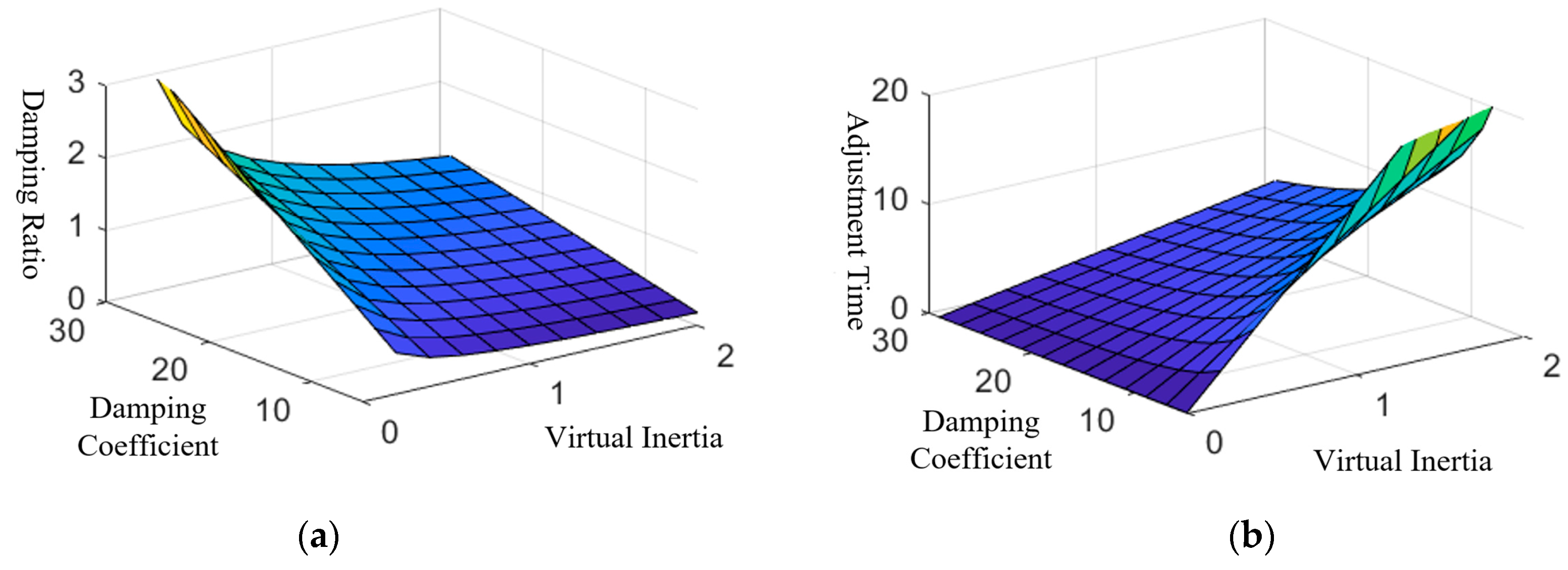
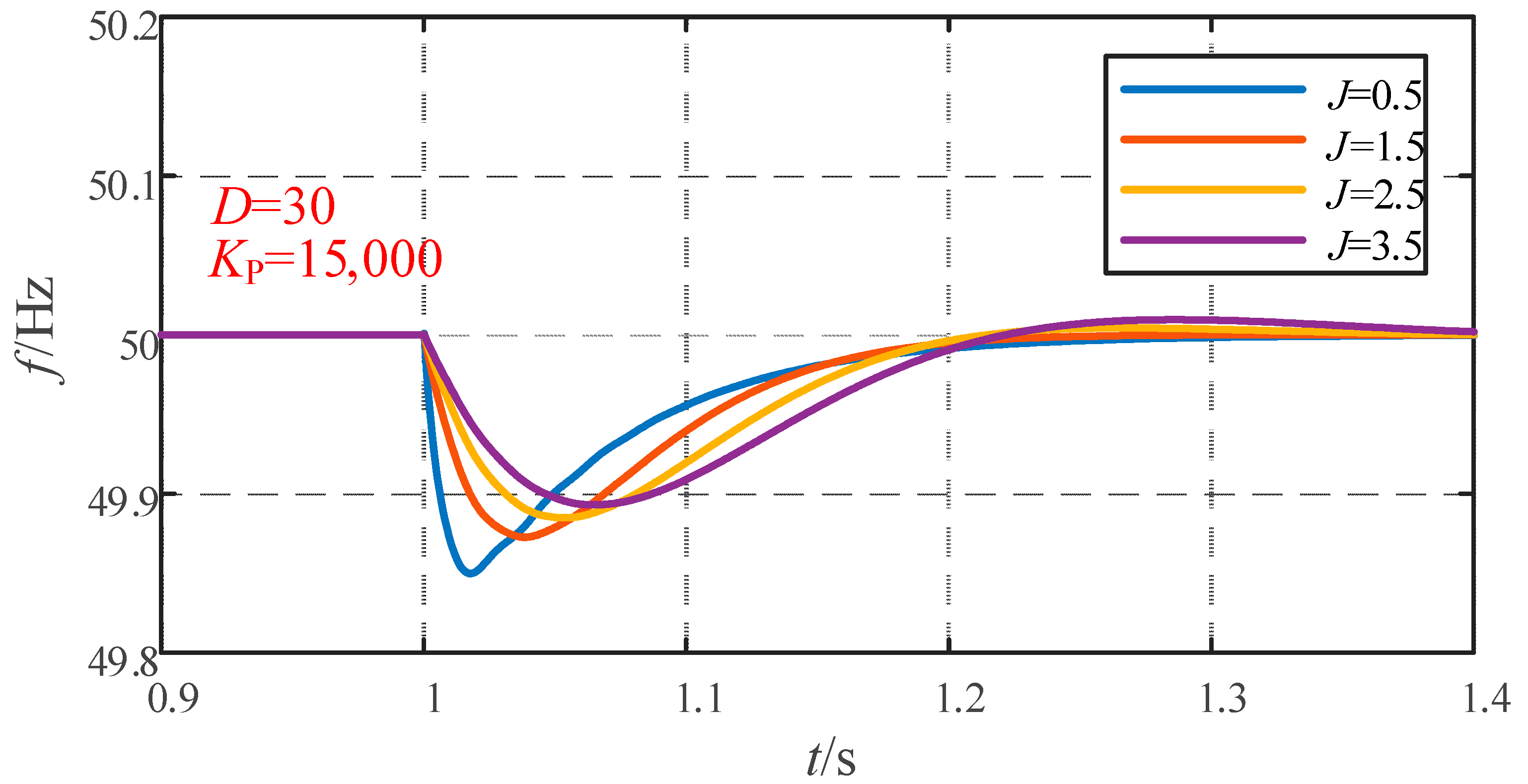
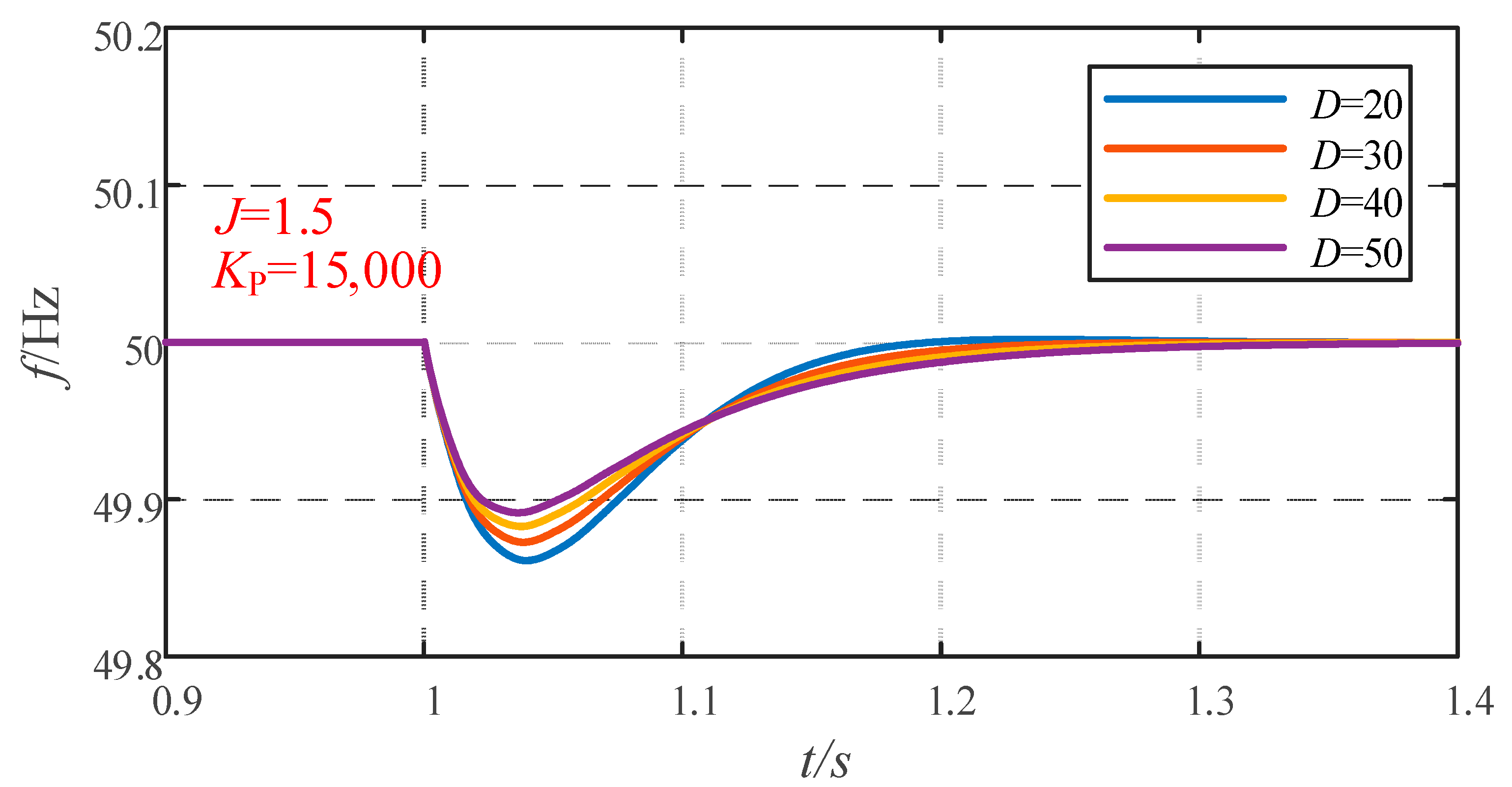
3.1. The Influence of VSG Parameters on the System
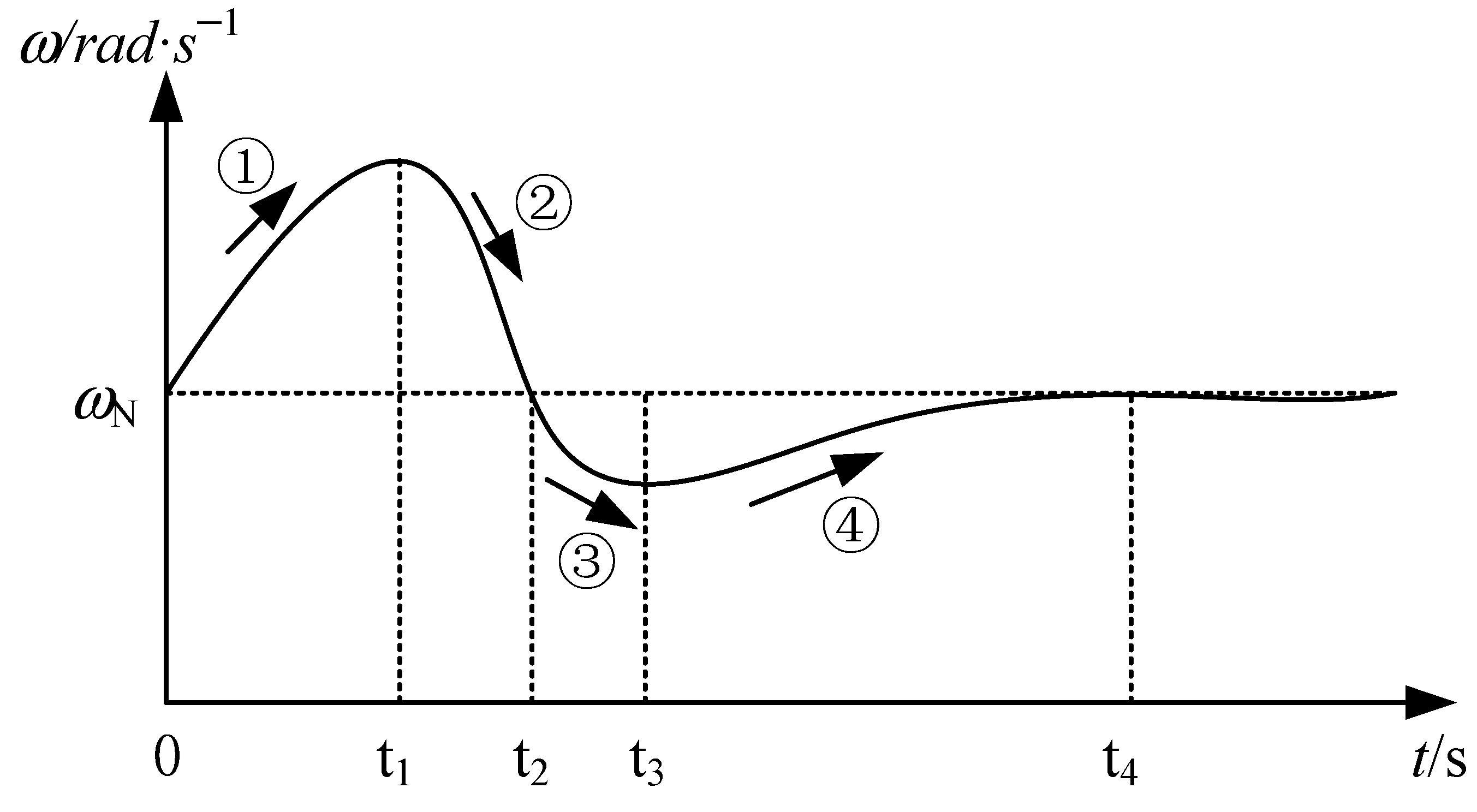
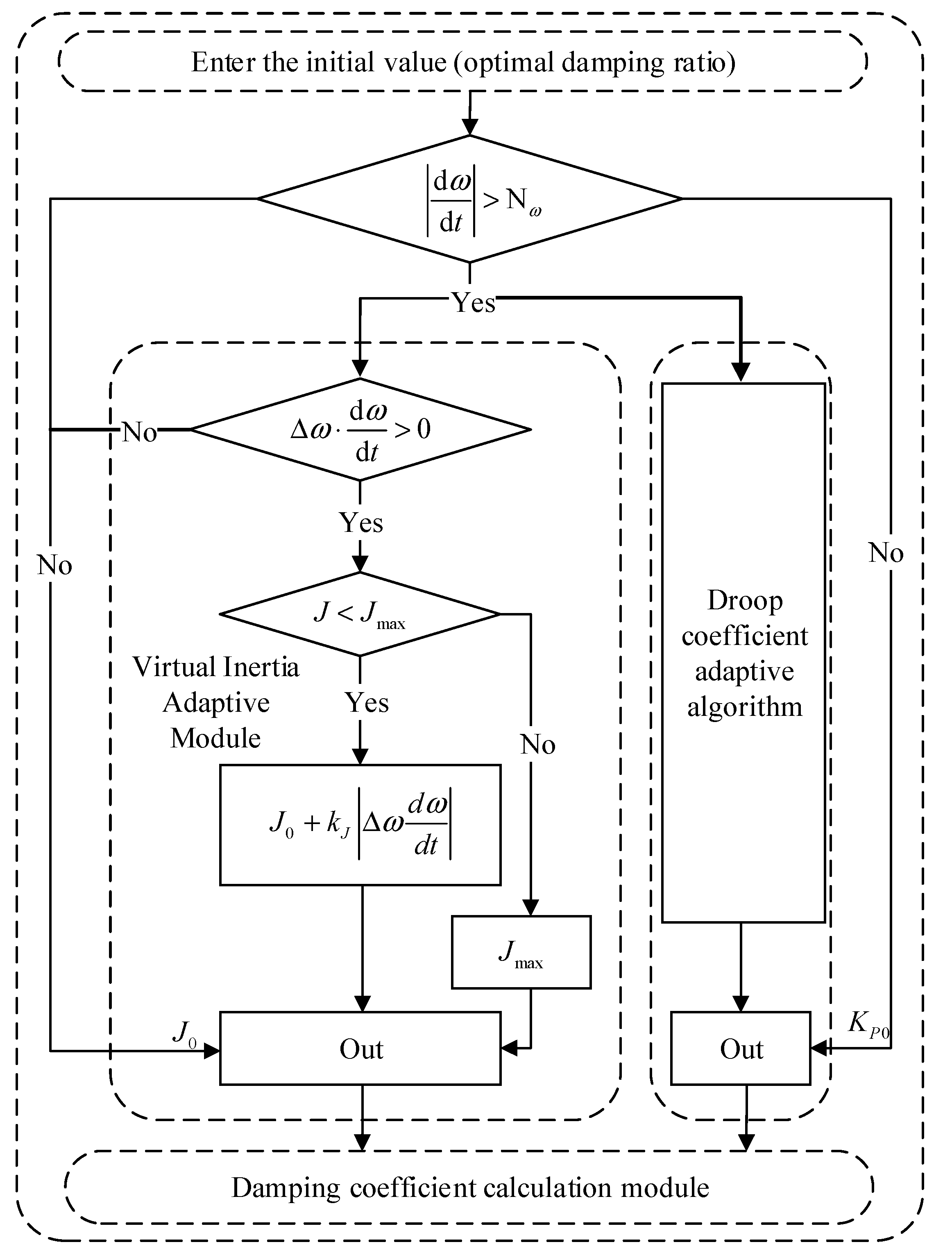
3.2. Cooperative Adaptive Selection Strategy of Control Parameters
- When Δω and dω/dt change in the same direction, J needs to be increased;
- When Δω and dω/dt change in opposite directions, J should be kept unchanged.
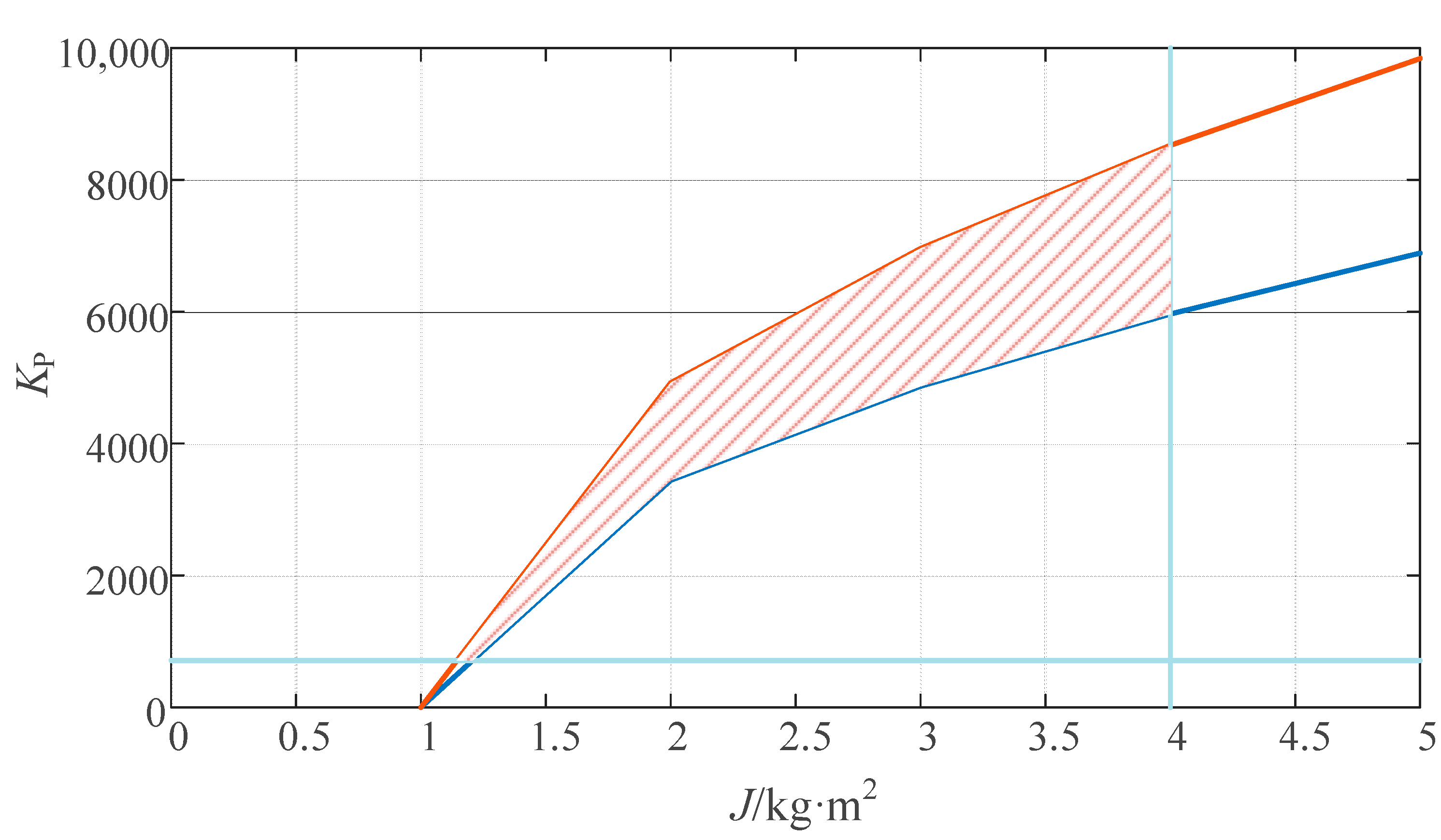
3.3. The Setting of Parameter Value Range
4. Simulation Analysis
4.1. Effect of Changes in System Parameters on System Frequency
4.2. Simulation under Varying System Loads
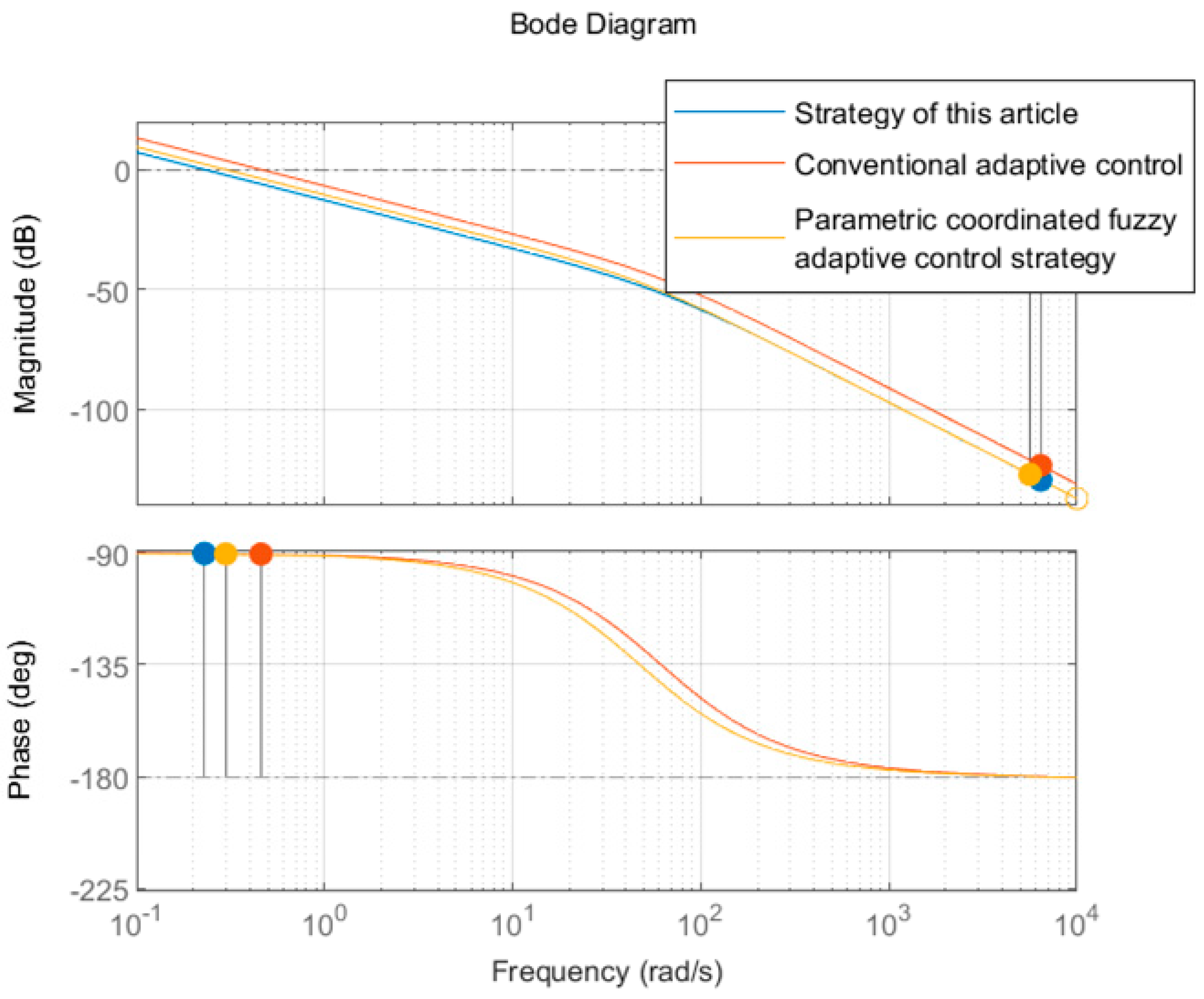
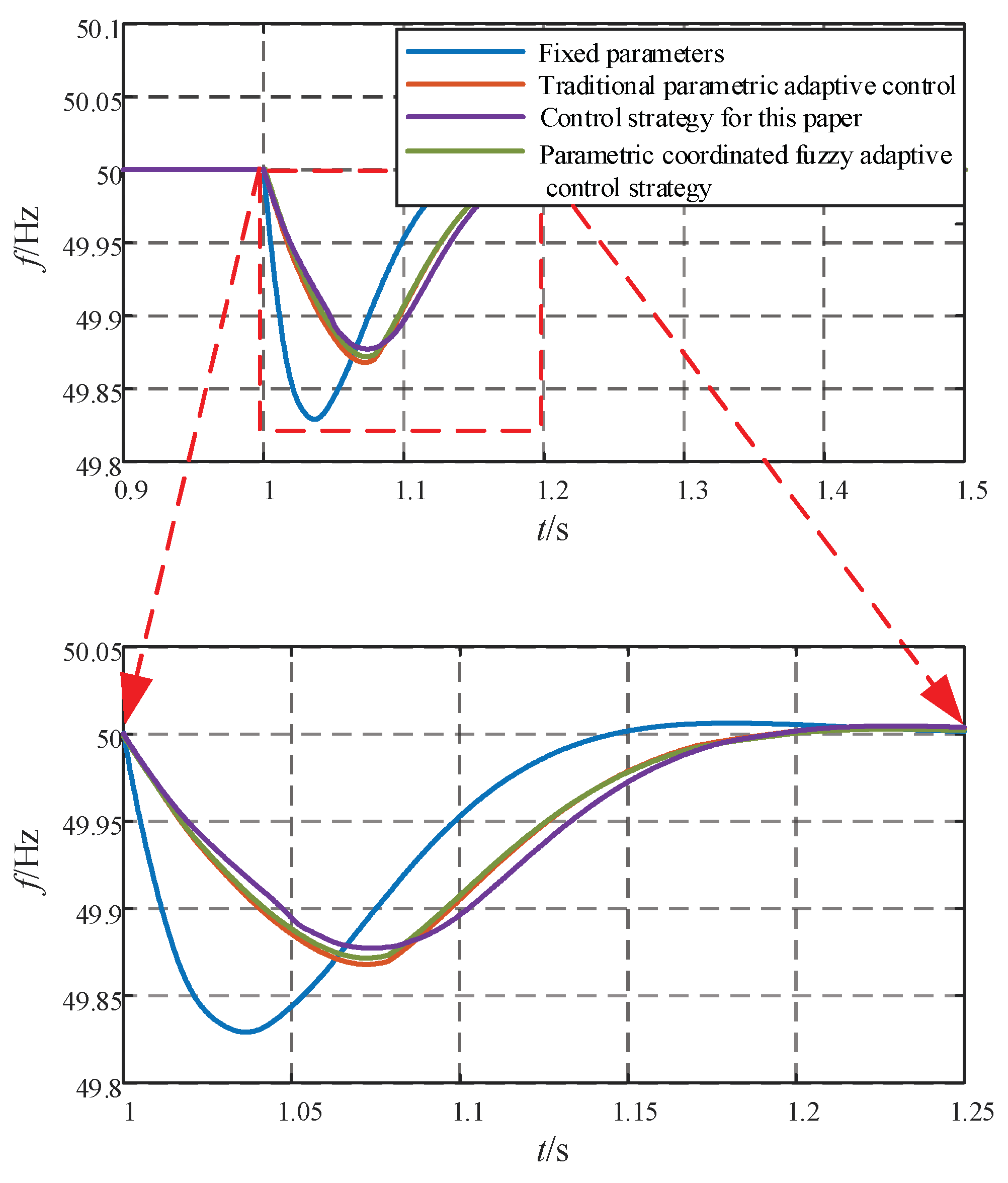
4.2.1. Simulation Comparison of Different Control Strategies
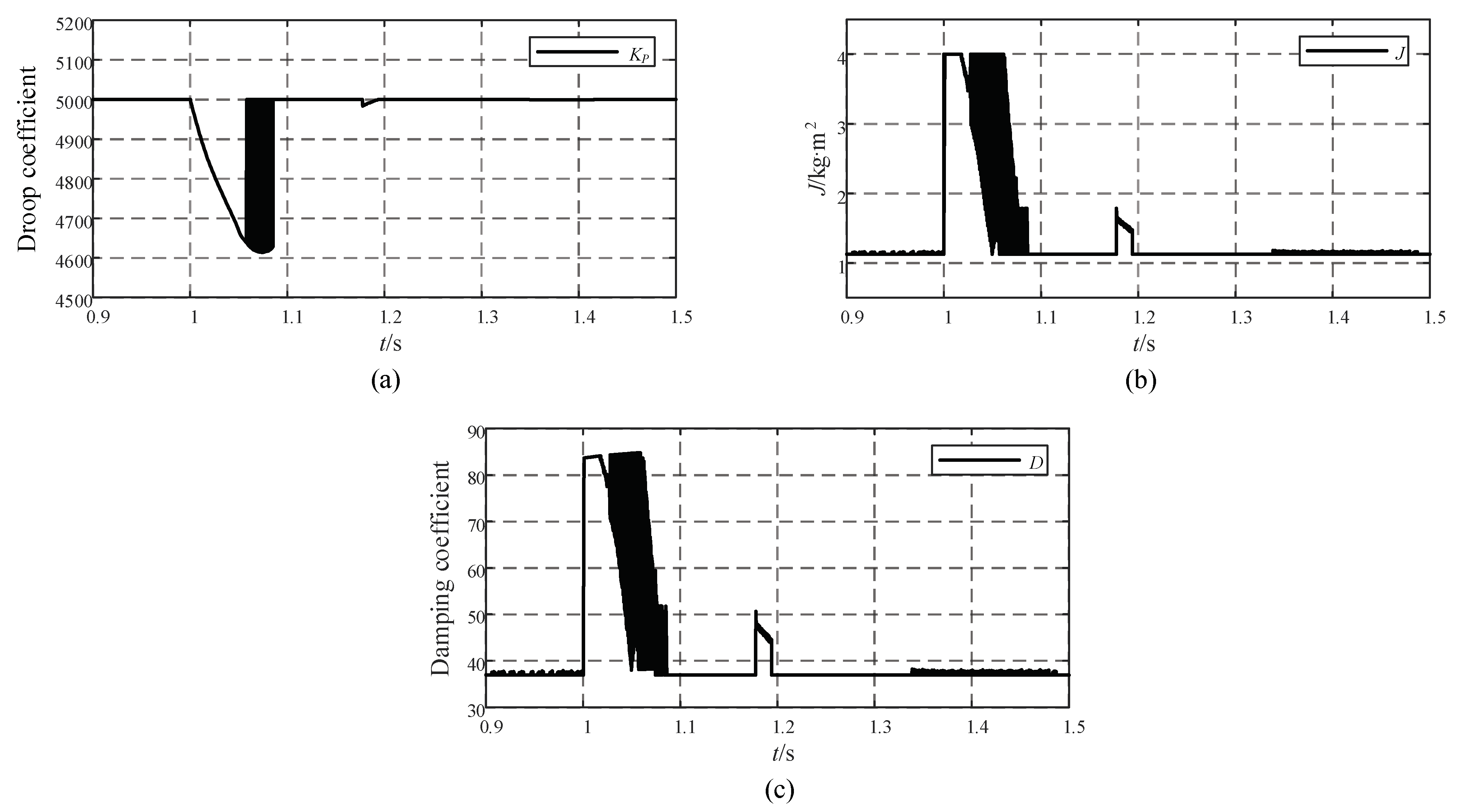
4.2.2. Comparison of Parameter Changes
4.3. Simulation under Grid Frequency Variation
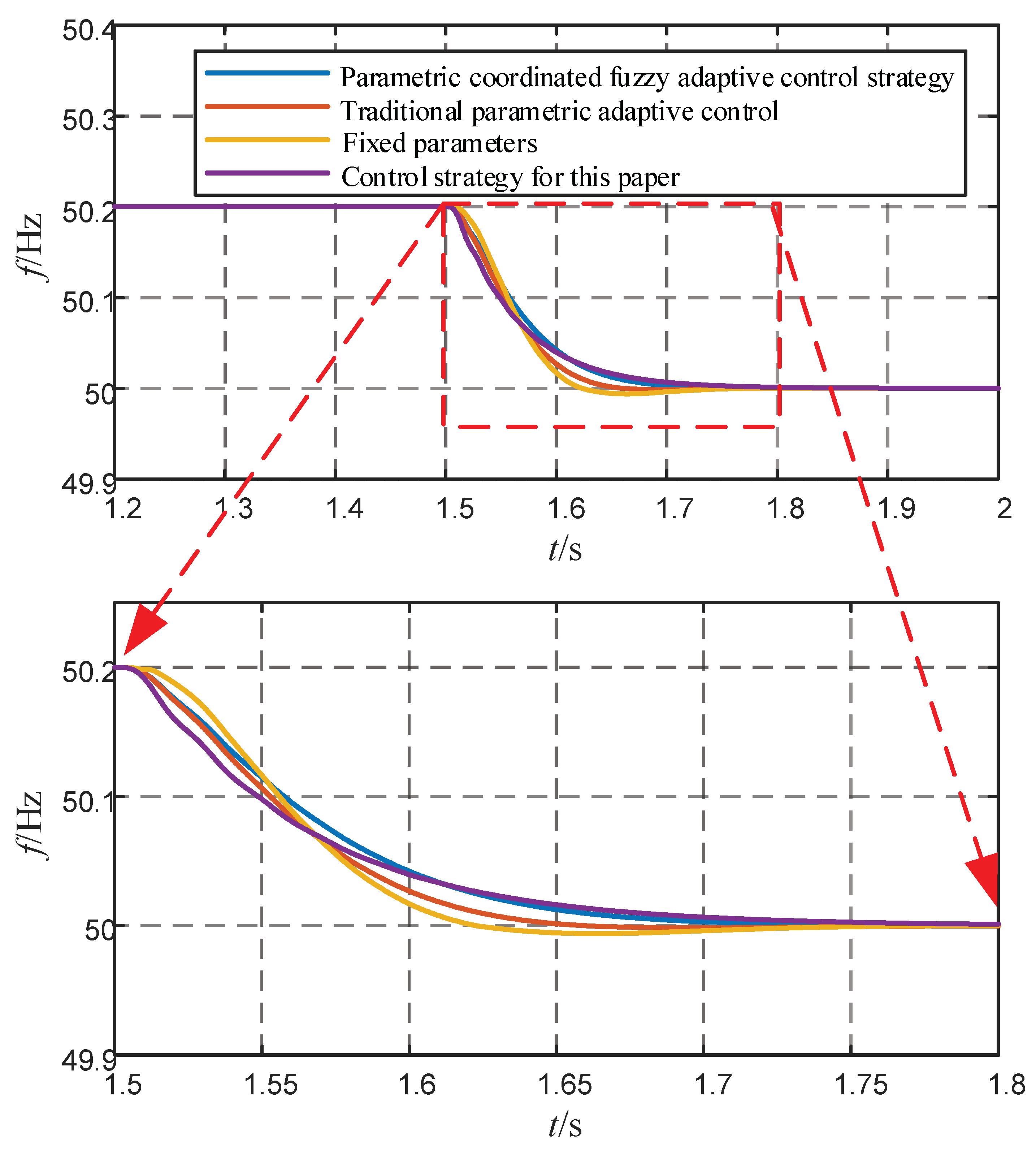
4.3.1. System Frequency Performance
4.3.2. Variation of the Three Parameters
5. Conclusions
- (1)
- Analyze the effect of droop factor, virtual inertia, and damping factor on the VSG system and determine the range of values for the system parameters.
- (2)
- The existing J and D coordinated adaptive control is optimized. The droop coefficient and virtual inertia can be adjusted in real time according to the system frequency state, and the damping coefficient can be changed cooperatively according to the corresponding relationship. The three are always coordinated and adjusted during the change process, which effectively improves the dynamic performance of the system frequency. The effectiveness and reliability of the proposed multiparameter cooperative adaptive control strategy have been verified by simulation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, X.Z.; Su, J.H.; Ding, M. Frequency control strategy for microgrid island operation. Power Syst. Technol. 2010, 34, 164–168. [Google Scholar]
- Sun, H.D.; Xu, T.; Guo, Q. Analysis on blackout in Great Britain power grid on August 9th, 2019 and its enlightenment to power grid in China. Proc. CSEE 2019, 39, 6183–6191. [Google Scholar]
- Wen, Y.F.; Yang, W.F.; Lin, X.H. Review and prospect of frequency stability analysis and control of low-inertia power systems. Electr. Power Autom. Equip. 2020, 40, 211–222. [Google Scholar]
- Zhong, Q.C.; Nguyen, P.L.; Ma, Z.Y. Selfsynchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2014, 29, 617–630. [Google Scholar] [CrossRef]
- Du, W.; Jiang, Q.R.; Chen, J.R. Design and application of reactive power control system for wind farm. Autom. Electr. Power Syst. 2011, 35, 26–31. [Google Scholar]
- Ren, H.P.; Chen, Q.; Zhang, L.L. Parameter adaptive strategy for virtual synchronous generator control. Control Theory Appl. 2020, 37, 2571–2580. [Google Scholar]
- Wang, F.; Zhang, L.J.; Feng, X.Y. An adaptive control strategy for virtual synchronous generator. IEEE Trans. Ind. Appl. 2018, 54, 5124–5133. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Zhu, Z.B.; Zhang, C.Y.; Zeng, X.B. Photovoltaic energy storage microgrid system based on adaptive rotating inertia VSG control strategy. Proc. CSU-EPSA 2021, 33, 67–72. [Google Scholar]
- Zhou, P.G.; Meng, J.H.; Wang, Y. Influence analysis of the main control parameters in FVSG on the frequency stability of the system. High Volt. Eng. 2018, 44, 1335–1342. [Google Scholar]
- Yang, Y.; Mei, F.; Zhang, C.Y. Coordinated adaptive control strategy of rotational inertia and damping coefficient for virtual synchronous generator. Electr. Power Autom. Equip. 2019, 39, 125–131. [Google Scholar]
- Li, D.D.; Zhu, Q.W.; Lin, S.F. A self-adaptive inertia and damping combination control of VSG to support frequency stability. IEEE Trans. Energy Convers. 2017, 32, 397–398. [Google Scholar] [CrossRef]
- Li, Z.J.; Yang, M.W.; Zhang, J.A.; Liu, H.J. Research on the cooperative adaptive control of VSG inertia and damping. J. Electr. Power Syst. Autom. 2023, 35, 36–43. [Google Scholar]
- Zhang, X.W.; Tan, L.P.; Chen, W.H.; Liu, Y.; Liu, M.S. Inertia lifting method of energy storage converter based on secondary system optimization. Power Syst. Prot. Control 2021, 49, 128–135. (In Chinese) [Google Scholar]
- Fan, Y.N.; Liu, T.Y.; Jiang, X.C.; Sheng, G.H.; Zhang, X.S. Optimal control strategy based on optimal damping ratio dummy synchronous generator. Electr. Meas. Instrum. 2020, 57, 60–67. (In Chinese) [Google Scholar]
- He, P.; Li, Z.; Jin, H.R.; Zhao, C.; Fan, J.L.; Wu, X.P. An adaptive VSG control strategy of battery energy storage system for power system frequency stability enhancement. Int. J. Electr. Power Energy Syst. 2023, 149, 142–615. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Sun, X.L.; Fu, W.L.; Hu, S.L. Parametric coordinated fuzzy adaptive VSG control strategy. Electron. Meas. Technol. 2022, 45, 1–7. (In Chinese) [Google Scholar]
- Peng, C.; Hu, L.R.; Zhang, L.M.; Wang, B.H. Adaptive damping control of microgrid based on distributed VSG. Power Electron. Technol. 2023, 57, 85–88. (In Chinese) [Google Scholar]
- Shao, Y.Y. Research on Energy Storage Inverter Control Based on Virtual Synchronous Generator; Zhejiang University: Hangzhou, China, 2021. [Google Scholar]
- Zhang, G.F.; Yang, J.Y.; Wang, H.X.; Xie, C.J.; Fu, Y. Coordinated Frequency Modulation Control Strategy of Wind Storage System Based on Virtual Synchronous Machine Technology. J. Electrotech. Technol. 2022, 37, 83–92. [Google Scholar]
- Lü, Z.P.; Sheng, W.X.; Zhong, Q.C. Virtual synchronous generator and its applications in micro-grid. Proc. CSEE 2014, 34, 2591–2603. (In Chinese) [Google Scholar]
- Du, Y.; Su, J.H.; Zhang, L.C. A mode adaptive frequency controller for microgrid. Proc. CSEE 2013, 33, 67–75. [Google Scholar]
- Xu, H.Z.; Zhang, X.; Liu, F. Virtual Synchronous Generator Control Strategy Based on Lead-lag Link Virtual Inertia. Proc. CSEE 2017, 37, 1918–1927. (In Chinese) [Google Scholar]
- Xu, H.Z.; Zhang, X.; Liu, F. Control strategy of virtual synchronous generator based on differential compensation virtual inertia. Autom. Electr. Power Syst. 2017, 41, 96–102. (In Chinese) [Google Scholar]
- Xu, H.; Yu, C.; Liu, C.; Wang, Q.; Zhang, X. An Improved Virtual Inertia Algorithm of Virtual Synchronous Generator. J. Mod. Power Syst. Clean Energy 2020, 8, 377–386. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| Rated voltage on AC grid ug (V) | 380 | Filter inductor Labc(mH) | 0.8 |
| Rated voltage on DC side Udc (V) | 800 | Filter capacitor Cabc (uF) | 10 |
| Rated active power (W) | 50,000 | Initial value of virtual inertia J0 (kg·m2) | 1.127 |
| Rated reactive power (Var) | 0 | Initial value of droop coefficient KP0 | 5000 |
| Control Strategy | Nadir (Hz) | Deviation (Hz) | Adjustment Time (s) | ROCOF |
|---|---|---|---|---|
| Fixed parameters | 49.83 | 0.17 | 0.3 | maximum |
| J, D adaptive control | 49.867 | 0.133 | 0.22 | medium |
| Parametric coordinated fuzzy adaptive control strategy | 49.868 | 0.132 | 0.22 | medium |
| Multiparameter cooperative adaptive control | 49.877 | 0.123 | 0.22 | minimum |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, B.; Li, Q.; Fan, Z.; Sun, Y. Adaptive Control of a Virtual Synchronous Generator with Multiparameter Coordination. Energies 2023, 16, 4789. https://doi.org/10.3390/en16124789
Ren B, Li Q, Fan Z, Sun Y. Adaptive Control of a Virtual Synchronous Generator with Multiparameter Coordination. Energies. 2023; 16(12):4789. https://doi.org/10.3390/en16124789
Chicago/Turabian StyleRen, Bixing, Qiang Li, Zhiyuan Fan, and Yichao Sun. 2023. "Adaptive Control of a Virtual Synchronous Generator with Multiparameter Coordination" Energies 16, no. 12: 4789. https://doi.org/10.3390/en16124789
APA StyleRen, B., Li, Q., Fan, Z., & Sun, Y. (2023). Adaptive Control of a Virtual Synchronous Generator with Multiparameter Coordination. Energies, 16(12), 4789. https://doi.org/10.3390/en16124789