
Time Series Optimization-Based Characteristic Curve Calculation for Local Reactive Power Control Using Pandapower-PowerModels Interface


Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
- Evolutionary algorithms and iterative simulations were often used to obtain the suitable parameters. A generalized approach using classical optimal power flow (deterministic optimization), which is more familiar to power system engineers, is lacking.
- In these studies, the control parameters were not discussed systemically. Only one or a limited number of parameters were considered. The others used standard settings.
- The design of the Q(P)-characteristic curve was mentioned relatively rarely. With suitable configuration, it may make a significant contribution to objectives.
- As mentioned in Section 1.1, in addition to supporting vs. and PLM, reactive power provision from DER in distribution grids can be also used to support the reactive power balancing (provide reactive power flexibilities) at the distribution-to-transmission interface and to enable the desired ancillary services at the up-streamed transmission level. Hence, the corresponding characteristic curves are worth studying. However, this has not been considered.
1.3. Contribution and Organization
- The ANN-based time series optimization (or estimation) needs low computational resources. Its drawbacks are obvious, i.e., it is highly subjective-dependent, and much time is required for pre-training and parametrization. It is inefficient for short-term time series optimization.
- Using polynomial regression to determine the characteristic curve (a continuous piecewise line: multiple segments connected by breakpoints) is not an efficient method. Firstly, we need to carefully select the polynomial degree based on the data. Secondly, the result is typically a single curve. This can make it challenging to identify the breakpoints necessary for the characteristic curve.
- Only the Q(P)-characteristic curve for voltage stability was considered.
- Lack of automatization and generalization.
- An implemented open-source tool (interface between pandapower [28] and PowerModels [29]) is applied and further developed, enabling the users to create custom mathematical optimization models for solving optimal power flow problems in an analytical and deterministic way. For this paper, additional models for reactive power optimization are implemented, applied, and released in github.
- The previous method is extended to Q(V)-characteristic curve calculations, considering dead band settings.
- The decision tree method is used for linear regression, with which a continuous piecewise line can be efficiently calculated as a characteristic curve.
- Q(P)- and Q(V)-characteristic curves for the observed grids can be individually calculated, supporting the maintenance of voltage stability, reactive power flexibility provision, loss minimization, and loading reduction.
2. Characteristic Curve Calculation for Local Reactive Power Control
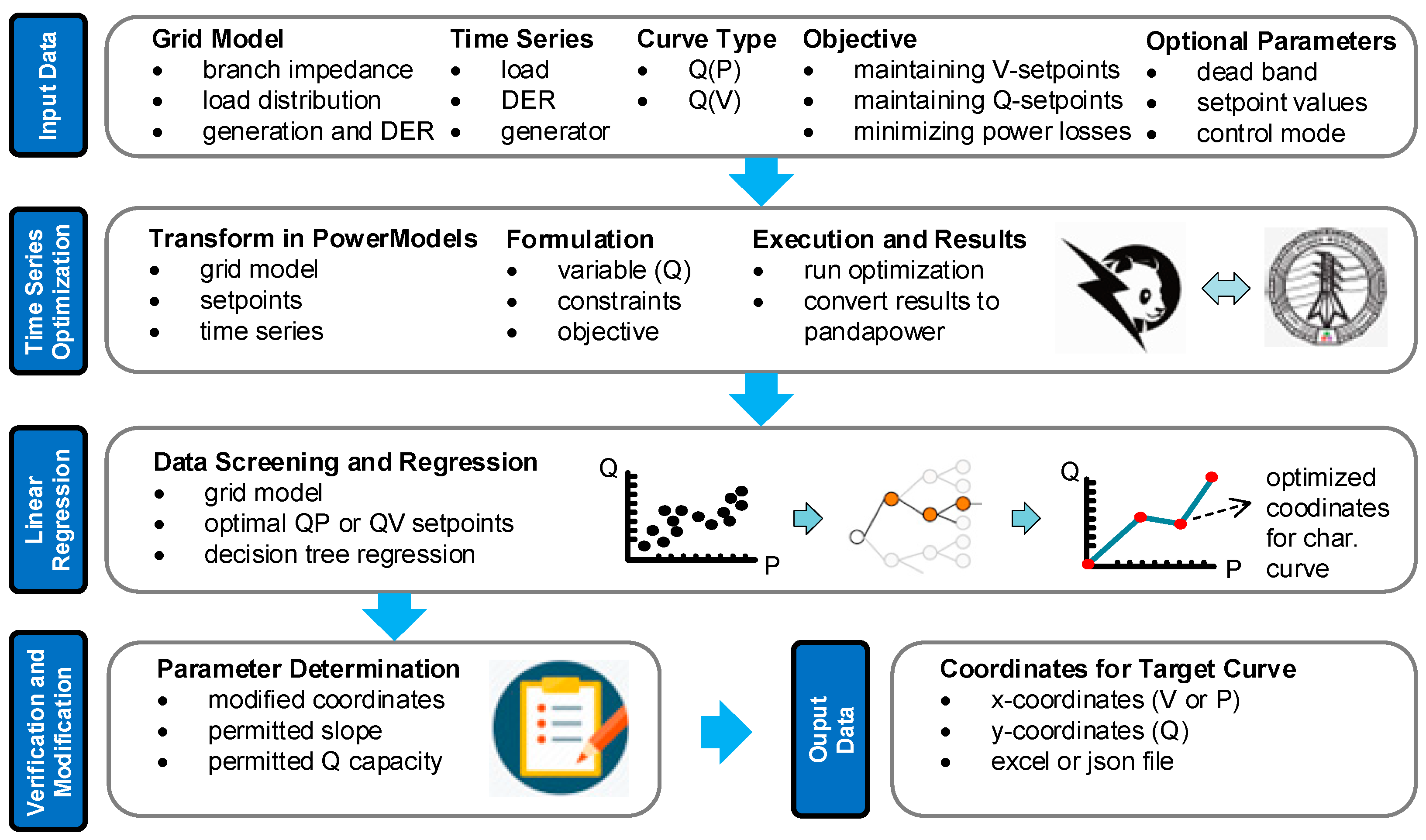
2.1. Method Overview
2.2. Continuous Piecewise Linear Fitting
2.3. Objective Functions
| sets: | |||
| buses generators (or DER) loads branches | |||
| variables: | |||
| voltage magnitude voltage angle reactive power of DER | |||
| (4) | |||
| subject to: | |||
| ac power flow | (5) | ||
| branch current | | (6) | |
| voltage magnitude | (7) | ||
| voltage angle | (8) | ||
| gen. reactive power | (9) | ||
| gen. active power | (10) | ||
| load apparent power | (11) | ||
2.4. Update Frequency
3. Optimization Tool: Interface between Pandapower and PowerModels
3.1. Pandapower and PowerModels
3.2. PandaModels
4. Case Studies
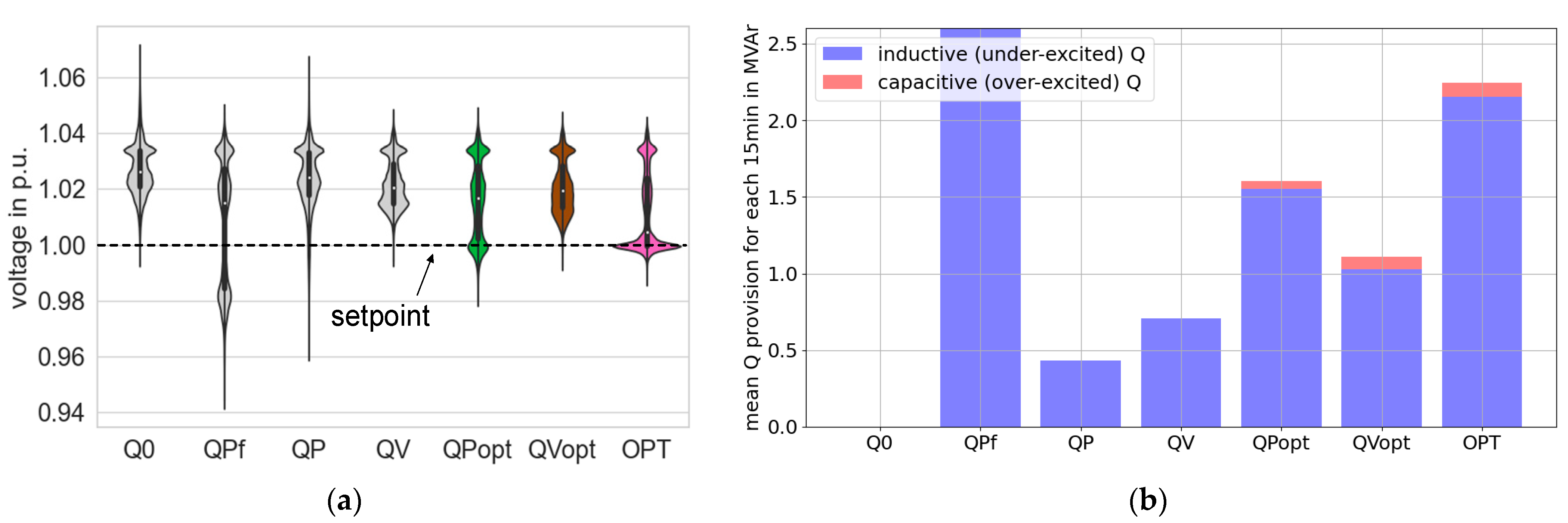
4.1. Characteristic Curve Calculations for Voltage Stability
4.1.1. Characteristic Curve Calculation and Simulations
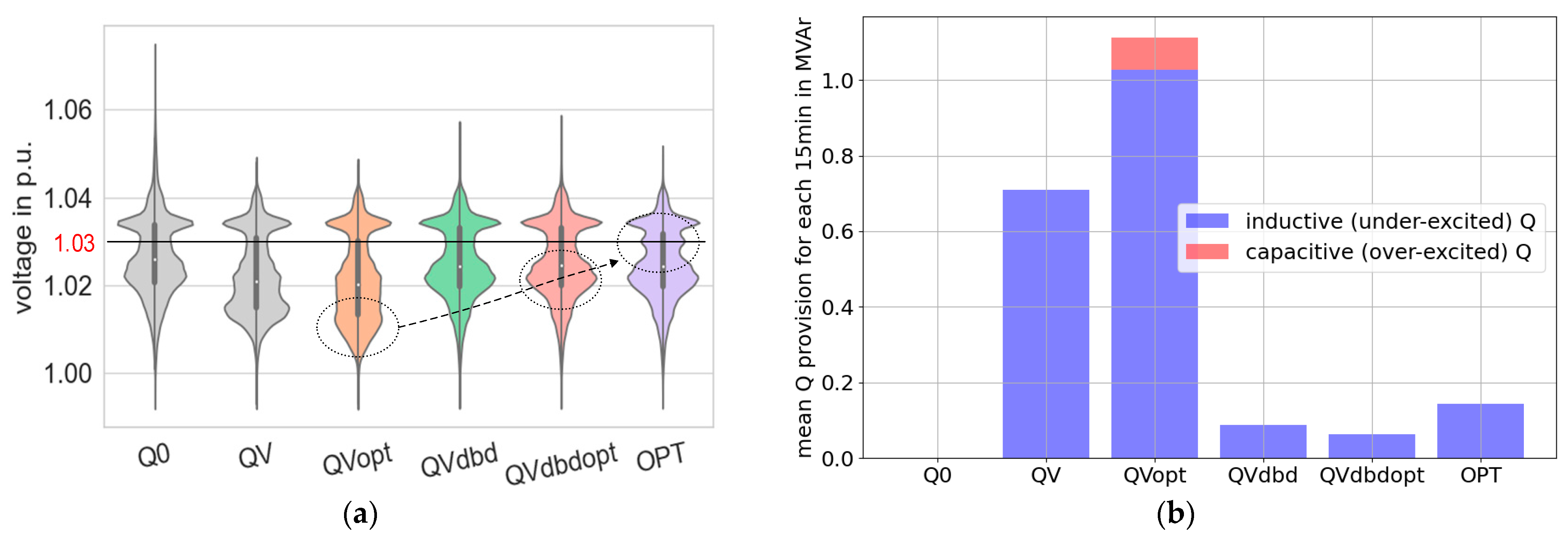
4.1.2. Calculation Considering Dead Band Setting
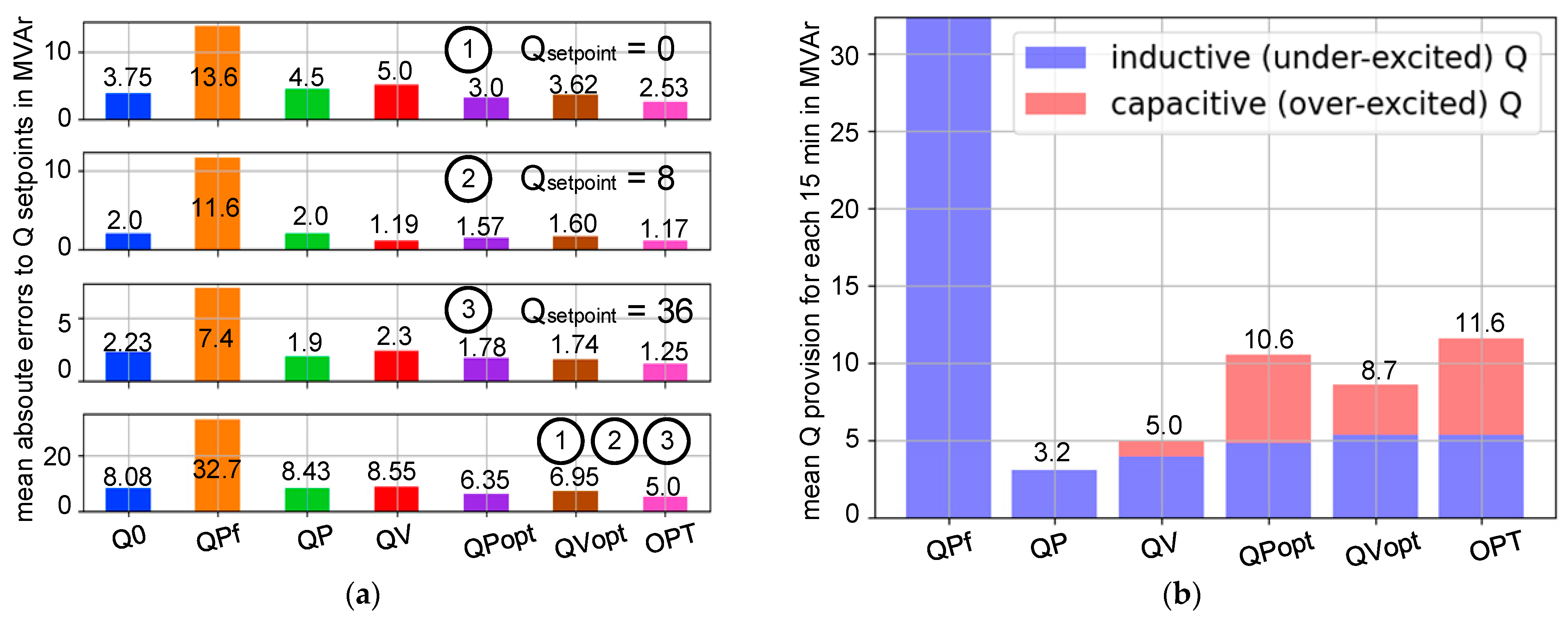
4.2. Characteristic Curve Calculations for Q-Flexibility Provision
4.2.1. Central Optimization
4.2.2. Characteristic Curves Calculation and Simulations
5. Conclusions
- The application of the proposed method for different power system devices and types of control curves, e.g., the I(V)-characteristic curve calculation for static var compensators and the P(V)-characteristic curve calculation for electric vehicle charging control. Correspondingly, more optimization models in PandaModels are expected to be further implemented, providing more different ancillary services.
- In this paper, Q(P)- and Q(V)-characteristic curves are observed separately. It may be worthwhile to investigate calculating different curve types based on their location in the grid.
- After the linear decision tree regression, any segment with an excessive slope is corrected to meet the grid code requirements. This corrected segment can be further optimized or appropriately shifted to better represent the distribution of optimized operating points. Additionally, considering Q(V)-characteristic curves with a dead band, the dead band width and position can also be optimized and integrated with the proposed method.
- In this paper, we utilized deterministic optimization to complement the proposed method. Theoretically, any optimization algorithm can be combined with the proposed method. Depending on the specific scenario and grid characteristics, the integration of meta-heuristic optimization algorithms, such as differential evolutionary optimization, holds the potential for achieving superior results. This avenue of investigation merits further exploration.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Federal Ministry for Economic Affairs and Energy. Figures, Data and Information Concerning EEG. Available online: https://www.bundesnetzagentur.de/EN/Areas/Energy/Companies/RenewableEnergy/FactsFiguresEEG/start.html (accessed on 29 November 2022).
- Deutsche Energie-Agentur GmbH. Beobachtbarkeit und Steuerbarkeit im Energiesystem: Handlungsbedarfsanalyse der Dena-Plattform Systemdienstleistungen. Available online: https://www.dena.de/fileadmin/dena/Dokumente/Pdf/9184_Beobachtbarkeit_und_Steuerbarkeit_.pdf (accessed on 15 March 2023).
- Boyle, G. Renewable Electricity and the Grid: The Challenge of Variability; Earthscan: London, UK, 2009. [Google Scholar]
- Du, P.; Matevosyan, J. Forecast System Inertia Condition and Its Impact to Integrate More Renewables. IEEE Trans. Smart Grid 2017, 9, 1531–1533. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Li, Z. A Multiperiod Energy Acquisition Model for a Distribution Company with Distributed Generation and Interruptible Load. IEEE Trans. Power Syst. 2007, 22, 588–596. [Google Scholar] [CrossRef]
- Mao, M.; Jin, P.; Hatziargyriou, N.D.; Chang, L. Multiagent-Based Hybrid Energy Management System for Microgrids. IEEE Trans. Sustain. Energy 2014, 5, 938–946. [Google Scholar] [CrossRef]
- Lee, T.-L.; Hu, S.-H.; Chan, Y.-H. D-STATCOM with Positive-Sequence Admittance and Negative-Sequence Conductance to Mitigate Voltage Fluctuations in High-Level Penetration of Distributed-Generation Systems. IEEE Trans. Ind. Electron. 2011, 60, 1417–1428. [Google Scholar] [CrossRef]
- German Energy Agency. Dena Ancillary Service Study 2030: Security and Reliability of a Power Supply with a High Percentage of Renewable Energy. Available online: https://www.dena.de/fileadmin/dena/Dokumente/Themen_und_Projekte/Energiesysteme/dena-Studie_Systemdienstleistungen_2030/dena_Ancillary_Services_Study_2030.pdf (accessed on 29 November 2022).
- CEDEC; EDSO; Entsoe; Eurelectric Powering People; GEODE. TSO-DSO Report: An Integrated Approach to Active System Management. Available online: https://www.edsoforsmartgrids.eu/wp-content/uploads/2019/04/TSO-DSO_ASM_2019_190304.pdf (accessed on 29 November 2022).
- Olivier, F.; Aristidou, P.; Ernst, D.; van Cutsem, T. Active Management of Low-Voltage Networks for Mitigating Overvoltages Due to Photovoltaic Units. IEEE Trans. Smart Grid 2015, 7, 926–936. [Google Scholar] [CrossRef]
- Berizzi, A.; Bovo, C.; Falabretti, D.; Ilea, V.; Merlo, M.; Monfredini, G.; Subasic, M.; Bigoloni, M.; Rochira, I.; Bonera, R. Architecture and functionalities of a smart Distribution Management System. In Proceedings of the 16th International Conference on Harmonics and Quality of Power (ICHQP), Bucharest, Romania, 25–28 May 2014; pp. 439–443. [Google Scholar]
- Song, I.-K.; Yun, S.-Y.; Kwon, S.-C.; Kwak, N.-H. Design of Smart Distribution Management System for Obtaining Real-Time Security Analysis and Predictive Operation in Korea. IEEE Trans. Smart Grid 2012, 4, 375–382. [Google Scholar] [CrossRef]
- VDE-AR-N 4110; Technische Regeln für den Anschluss von Kundenanlagen an das Mittelspannungsnetz und Deren Betrieb, Verband der Elektrotechnik, Elektronik und Informationstechnik. VDE Verband der Elektrotechnik Elektronik Informationstechnik e.V.: Frankfurt am Main, Germany, 2018.
- Meyer, M.; Cramer, M.; Goergens, P.; Schnettler, A. Optimal use of decentralized methods for volt/var control in distribution networks. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar]
- Rylander, M.; Reno, M.J.; Quiroz, J.E.; Ding, F.; Li, H.; Broderick, R.J.; Mather, B.; Smith, J. Methods to determine recommended feeder-wide advanced inverter settings for improving distribution system performance. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 1393–1398. [Google Scholar]
- Takasawa, Y.; Akagi, S.; Yoshizawa, S.; Ishii, H.; Hayashi, Y. Evaluation of Voltage Regulation Functions of Smart Inverters Based on Penetration Level and Curtailment in Photovoltaic Systems. In Proceedings of the 2018 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Sarajevo, Bosnia and Herzegovina, 21–25 October 2018; pp. 1–6. [Google Scholar]
- van Dao, T.; Ishii, H.; Hayashi, Y. Optimal parameters of volt-var functions for photovoltaic smart inverters in distribution networks. IEEJ Trans. Electr. Electron. Eng. 2018, 14, 75–84. [Google Scholar]
- Takasawa, Y.; Akagi, S.; Yoshizawa, S.; Ishii, H.; Hayashi, Y. Effectiveness of updating the parameters of the Volt-VAR control depending on the PV penetration rate and weather conditions. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Auckland, New Zealand, 4–7 December 2017; pp. 1–5. [Google Scholar]
- Lee, H.-J.; Yoon, K.-H.; Shin, J.-W.; Kim, J.-C.; Cho, S.-M. Optimal Parameters of Volt–Var Function in Smart Inverters for Improving System Performance. Energies 2020, 13, 2294. [Google Scholar] [CrossRef]
- Montenegro, D.; Bello, M. Coordinating Control Devices and Smart Inverter Functionalities in the Presence of Variable Weather Conditions. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; pp. 1–9. [Google Scholar]
- Jafari, M.; Olowu, T.O.; Sarwat, A.I. Optimal Smart Inverters Volt-VAR Curve Selection with a Multi-Objective Volt-VAR Optimization using Evolutionary Algorithm Approach. In Proceedings of the 2018 North American Power Symposium (NAPS), Fargo, ND, USA, 9–11 September 2018; pp. 1–6. [Google Scholar]
- Thomas, F.; Krahmer, S.; Schegner, P. Robust and Optimized Voltage Droop Control Considering the Voltage Error. Available online: https://www.researchgate.net/publication/334491719_Ro-bust_and_Optimized_Voltage_Droop_Control_con-sidering_the_Voltage_Error (accessed on 26 May 2023).
- Kim, W.; Song, S.; Jang, G. Droop Control Strategy of Utility-Scale Photovoltaic Systems Using Adaptive Dead Band. Appl. Sci. 2020, 10, 8032. [Google Scholar] [CrossRef]
- Ampofo, D.O.; Abdelsamad, A.S.; Myrzik, J.M.; Asmah, M.W. Adaptive Q(U) Control using combined Genetic Algorithm and Artificial Neural Network. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 9–10 November 2020; pp. 1–6. [Google Scholar]
- Lee, D.; Han, C.; Jang, G. Stochastic Analysis-Based Volt–Var Curve of Smart Inverters for Combined Voltage Regulation in Distribution Networks. Energies 2021, 14, 2785. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Z.; Bornhorst, N.; Kraiczy, M.; Berg, S.W.-V.; Kerber, T.; Braun, M. Optimized Characteristic-Curve-Based Local Reactive Power Control in Distribution Grids with Distributed Generators. In Proceedings of the ETG Congress 2021, Online, 18–19 March 2021; pp. 1–6. Available online: https://ieeexplore.ieee.org/document/9469673 (accessed on 26 May 2023).
- Wang, Z.; Menke, J.-H.; Schäfer, F.; Braun, M.; Scheidler, A. Approximating multi-purpose AC Optimal Power Flow with reinforcement trained Artificial Neural Network. Energy AI 2021, 7, 100133. [Google Scholar] [CrossRef]
- Thurner, L.; Scheidler, A.; Schäfer, F.; Menke, J.-H.; Dollichon, J.; Meier, F.; Schäfer, F.; Menke, J.-H.; Dollichon, J.; Meier, F.; et al. Pandapower—An Open-Source Python Tool for Convenient Modeling, Analysis, and Optimization of Electric Power Systems. IEEE Trans. Power Syst. 2018, 33, 6510–6521. [Google Scholar] [CrossRef]
- Fobes, D.M.; Claeys, S.; Geth, F.; Coffrin, C. PowerModelsDistribution.jl: An open-source framework for exploring distribution power flow formulations. Electr. Power Syst. Res. 2020, 189, 106664. [Google Scholar] [CrossRef]
- Chen, B. A Practical Introduction to 9 Regression Algorithms. Available online: https://towardsdatascience.com/a-practical-introduction-to-9-regression-algorithms-389057f86eb9 (accessed on 26 May 2023).
- Cerliani, M. Linear Tree: The Perfect Mix of Linear Model and Decision Tree. Available online: https://towardsdatascience.com/linear-tree-the-perfect-mix-of-linear-model-and-decision-tree-2eaed21936b7 (accessed on 30 November 2020).
- Python Package Linear-Tree. Available online: https://github.com/cerlymarco/linear-tree (accessed on 30 November 2022).
- Sojer, M. Voltage Regulating Distribution Transformers as new Grid Asset. Procedia Eng. 2017, 202, 109–120. [Google Scholar] [CrossRef]
- Wenderoth, F.; Drayer, E.; Schmoll, R.; Niedermeier, M.; Braun, M. Architectural and functional classification of smart grid solutions. Energy Inform. 2019, 2, 33. [Google Scholar] [CrossRef]
- Özkaraca, O. A review on usage of optimization methods in geothermal power generation. Mugla J. Sci. Technol. 2018, 4, 130–136. [Google Scholar] [CrossRef]
- Risi, B.-G.; Riganti-Fulginei, F.; Laudani, A. Modern Techniques for the Optimal Power Flow Problem: State of the Art. Energies 2022, 15, 6387. [Google Scholar] [CrossRef]
- McKinney, W. Data Structures for Statistical Computing in Python. In Proceedings of the 9th Python in Science Conference, Austin, TX, USA, 28 June–3 July 2010; pp. 56–61. [Google Scholar]
- PyPower. Available online: https://pypi.python.org/pypi/pypower (accessed on 30 November 2022).
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V.B. Julia: A Fresh Approach to Numerical Computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef]
- Dunning, I.; Huchette, J.; Lubin, M. JuMP: A Modeling Language for Mathematical Optimization. SIAM Rev. 2017, 59, 295–320. [Google Scholar] [CrossRef]
- Bolgaryn, R.; Banerjee, G.; Cronbach, D.; Drauz, S.; Liu, Z.; Majidi, M.; Maschke, H.; Wang, Z.; Thurner, L. Recent Developments in Open Source Simulation Software pandapower and pandapipes. In Proceedings of the 2022 Open Source Modelling and Simulation of Energy Systems, Aachen, Germany, 4–5 April 2022; pp. 1–7. [Google Scholar]
- Wang, Z.; Liu, Z.; Kraiczy, M.; Bornhorst, N.; Berg, S.W.-V.; Braun, M. Fast parallel quasi-static time series simulator for active distribution grid operation with pandapower. In Proceedings of the CIRED 2021—The 26th International Conference and Exhibition on Electricity Distribution, Online, 20–23 September 2021; pp. 1602–1606. [Google Scholar]
- Han, S.; Qiao, Y.; Yan, J.; Liu, Y.; Li, L.; Wang, Z. Mid-to-long term wind and photovoltaic power generation prediction based on copula function and long short term memory network. Appl. Energy 2019, 239, 181–191. [Google Scholar] [CrossRef]
- Shohan, M.J.A.; Faruque, M.O.; Foo, S.Y. Forecasting of Electric Load Using a Hybrid LSTM-Neural Prophet Model. Energies 2022, 15, 2158. [Google Scholar] [CrossRef]
- Renewables.ninja. Available online: https://www.renewables.ninja/ (accessed on 30 November 2022).
- Marggraf, O.; Laudahn, S.; Engel, B.; Lindner, M.; Aigner, C.; Witzmann, R.; Schoeneberger, M.; Patzack, S.; Vennegeerts, H.; Cremer, M.; et al. U-Control—Analysis of Distributed and Automated Voltage Control in current and future Distribution Grids. In Proceedings of the ETG-Fb. 155: International ETG Congress 2017: Die Energiewende—Blueprints for the New Energy Age Proceedings, Bonn, Germany, 28–29 November 2017. [Google Scholar]
- Meinecke, S.; Sarajlić, D.; Drauz, S.R.; Klettke, A.; Lauven, L.-P.; Rehtanz, C.; Moser, A.; Braun, M. SimBench—A Benchmark Dataset of Electric Power Systems to Compare Innovative Solutions Based on Power Flow Analysis. Energies 2020, 13, 3290. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Determination/Limitation |
|---|---|
| Limits of reactive power provision: | Determined by grid code: [, ] |
| Limits of active power: | Determined by grid code: |
| Number of breakpoints: |
| Parameter | Determination/Limitation |
|---|---|
| Limits of reactive power provision: | Determined by grid code: [, ] |
| Reference voltage value: | Determined by grid operators: e.g., 1.01 p.u. |
| Dead band: | within bounds [] |
| Slope: | |
| Number of breakpoints: |
| Article | Type | Objective | Dead Band | Slope | Breakpoint | Power Factor | Description/Comments | |
|---|---|---|---|---|---|---|---|---|
| [14] | Q(P) Q(V) | VS PLM | --- | --- | --- | This method is used to optimize the control parameters for different grid areas separately with heuristic approaches (Genetic algorithm (GA), Downhill-Simplex/Nelder mead, Golden Section Search). | ||
| [15] | VS PLM | --- | --- | --- | --- | An analysis method is proposed to improve the PV hosting capacity by the modification of the power factor (𝑄min, 𝑄max). | ||
| [16] | PLM | --- | --- | --- | --- | To reduce the power loss, the reference setpoint location is analyzed considering the PV penetration rate and the weather conditions. | ||
| [17] | VS | --- | --- | --- | --- | The P(V)-control and the Q(V)-control are combined considering active power curtailment. | ||
| [18] | Q(V) | VS PLM | --- | --- | --- | According to the daily clearness index and the daily variability index, the grid condition (with high PV penetration) is classified into five types. For each grid condition type, the best dead band and slope in terms of power loss are determined by varying over ranges. | ||
| [19] | VS PLM | --- | --- | Particle Swarm Optimization is used to optimize the control parameter. The grid states, e.g., power loss, are represented by revenues and measurements from DSO and customers. | ||||
| [20] | VS | --- | --- | --- | Using a three-phase optimal power flow, the voltage reference point of the Q(V)-curve is optimized. | |||
| [21] | VS | --- | --- | --- | --- | The use of GA is proposed to optimize the slope of the Q(V)-curve for grids with high penetration of PV. | ||
| [22] | VS | --- | --- | --- | --- | The presented methodology aims to achieve the necessary tuning of the reference voltage with explicit consideration of the steady state error inherent in the Q(V)-control. | ||
| [23] | VS | --- | --- | --- | --- | Using sensitivity analysis, the setting of the dead band that satisfies the voltage maintenance standard for two special disturbances in transmission systems is addressed. | ||
| [24] | VS | --- | --- | --- | The paper proposes a two-stage method based on GA and an artificial neural network (ANN) to adapt the control parameters of Q(V)-curve. The ANN aims to develop a fitting function correlating the Thevenin impedance at the PCC and optimal control parameters obtained from the GA optimization. | |||
| [25] | VS PLM | --- | --- | --- | The conventional Q(V)-curve is divided into multi-sections to compensate for reactive power, minimizing the power loss actively. The sections are determined by GA. |
| DER Type | Normal Distribution Parameters: Mean; Standard Deviation |
|---|---|
| PV | |
| Wind | |
| Load |
| Simulation ID | Applied Characteristic Curves |
|---|---|
| Q0 (reference) | No controller |
| QPf (reference) | Fixed Q(P) (cf. Figure 10) |
| QP (reference) | Q(P) (cf. Figure 10) |
| QV (reference) | Q(V) (cf. Figure 10) |
| QPopt | Individually calculated Q(P) |
| QVopt | Individually calculated Q(V) |
| OPT | Results directly from time series optimization |
| QVdbd (reference) | Q(V) with the dead band (cf. Figure 10) |
| OVdbdopt | Individually calculated Q(V) considering the dead band |
| Interface | Q Flexibility at the Interface |
|---|---|
| Güstrow | 0 MVAr |
| Schwerin | 8 MVAr |
| Perleberg | 36 MVAr |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Majidi, M.; Wang, H.; Mende, D.; Braun, M. Time Series Optimization-Based Characteristic Curve Calculation for Local Reactive Power Control Using Pandapower-PowerModels Interface. Energies 2023, 16, 4385. https://doi.org/10.3390/en16114385
Liu Z, Majidi M, Wang H, Mende D, Braun M. Time Series Optimization-Based Characteristic Curve Calculation for Local Reactive Power Control Using Pandapower-PowerModels Interface. Energies. 2023; 16(11):4385. https://doi.org/10.3390/en16114385
Chicago/Turabian StyleLiu, Zheng, Maryam Majidi, Haonan Wang, Denis Mende, and Martin Braun. 2023. "Time Series Optimization-Based Characteristic Curve Calculation for Local Reactive Power Control Using Pandapower-PowerModels Interface" Energies 16, no. 11: 4385. https://doi.org/10.3390/en16114385
APA StyleLiu, Z., Majidi, M., Wang, H., Mende, D., & Braun, M. (2023). Time Series Optimization-Based Characteristic Curve Calculation for Local Reactive Power Control Using Pandapower-PowerModels Interface. Energies, 16(11), 4385. https://doi.org/10.3390/en16114385