
Energy Consumption Prediction of Electric City Buses Using Multiple Linear Regression



Abstract
1. Introduction
State of the Art
- Most studies investigate only a few inputs, which are mainly focused on kinematic parameters or features that standard vehicles in many cases are not equipped to measure by themselves, such as the road slope or the location of bus stops. Characterizing speed profiles including, e.g., frequency and time domain reveals hidden and valuable information leading to higher prediction accuracy and generalization in the end.
- Often operational features such as route or trip length are considered. Explicitly, these are heavily dependent on the target scenario and vary from case to case, making them non-generally meaningful.
- Most data-driven studies typically use support vector machines or neural networks and do not consider statistical methods. Consequently, the models are comparably complex and of high computational costs, and extra caution has to be paid during training. As statistical methods are just a set of parameterized functions, they are likewise precise, robust and of low complexity at the same time and can be readily used in vehicle applications straight away.
- The database in almost all studies comes from a single vehicle or single route. Whole fleet data on the other side covers many vehicles, several routes and various drivers, capturing a huge number of different traffic situations and driving styles.
2. Materials and Methods
2.1. Data Collection and Pre-Processing
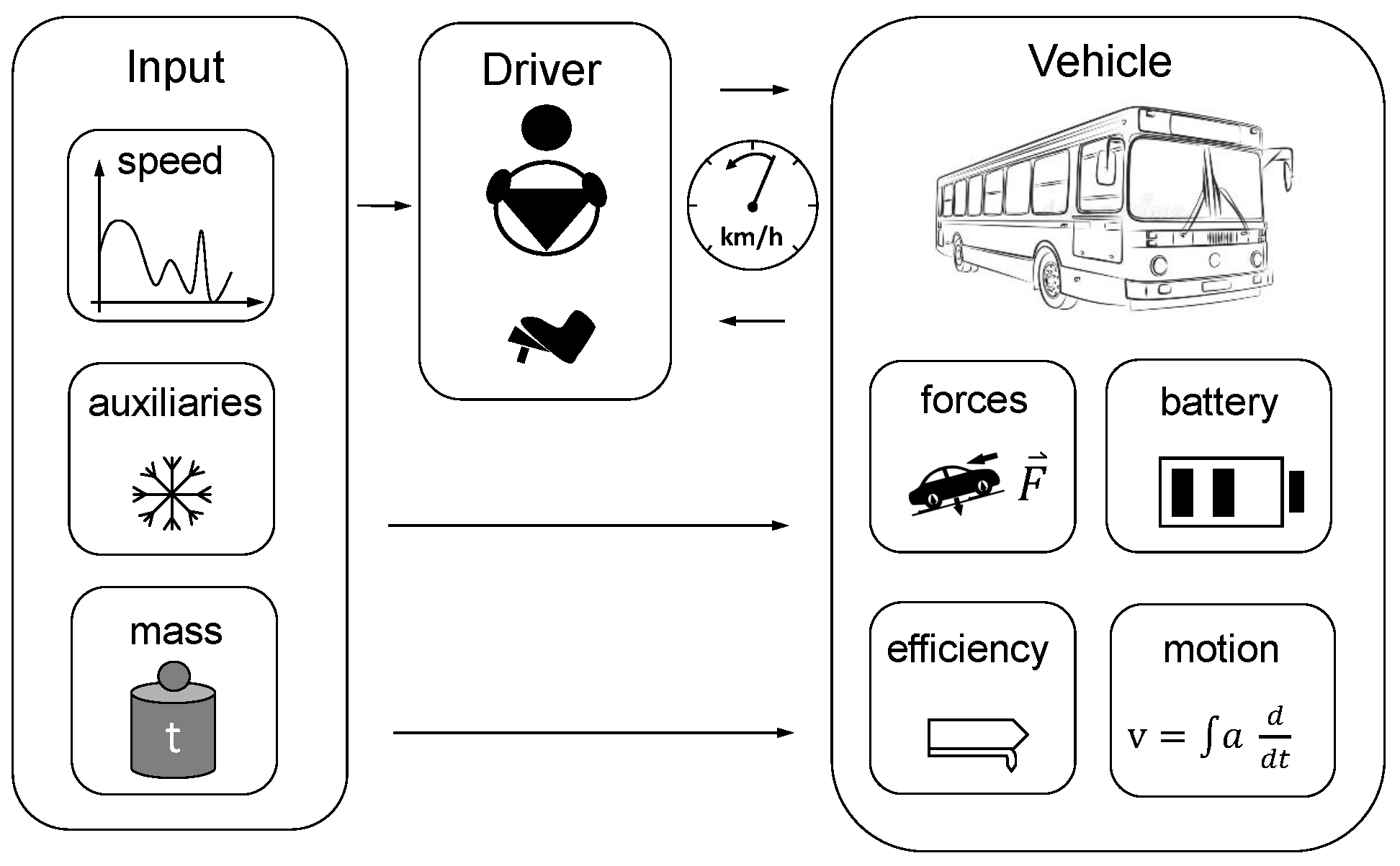
Energy Consumption Model
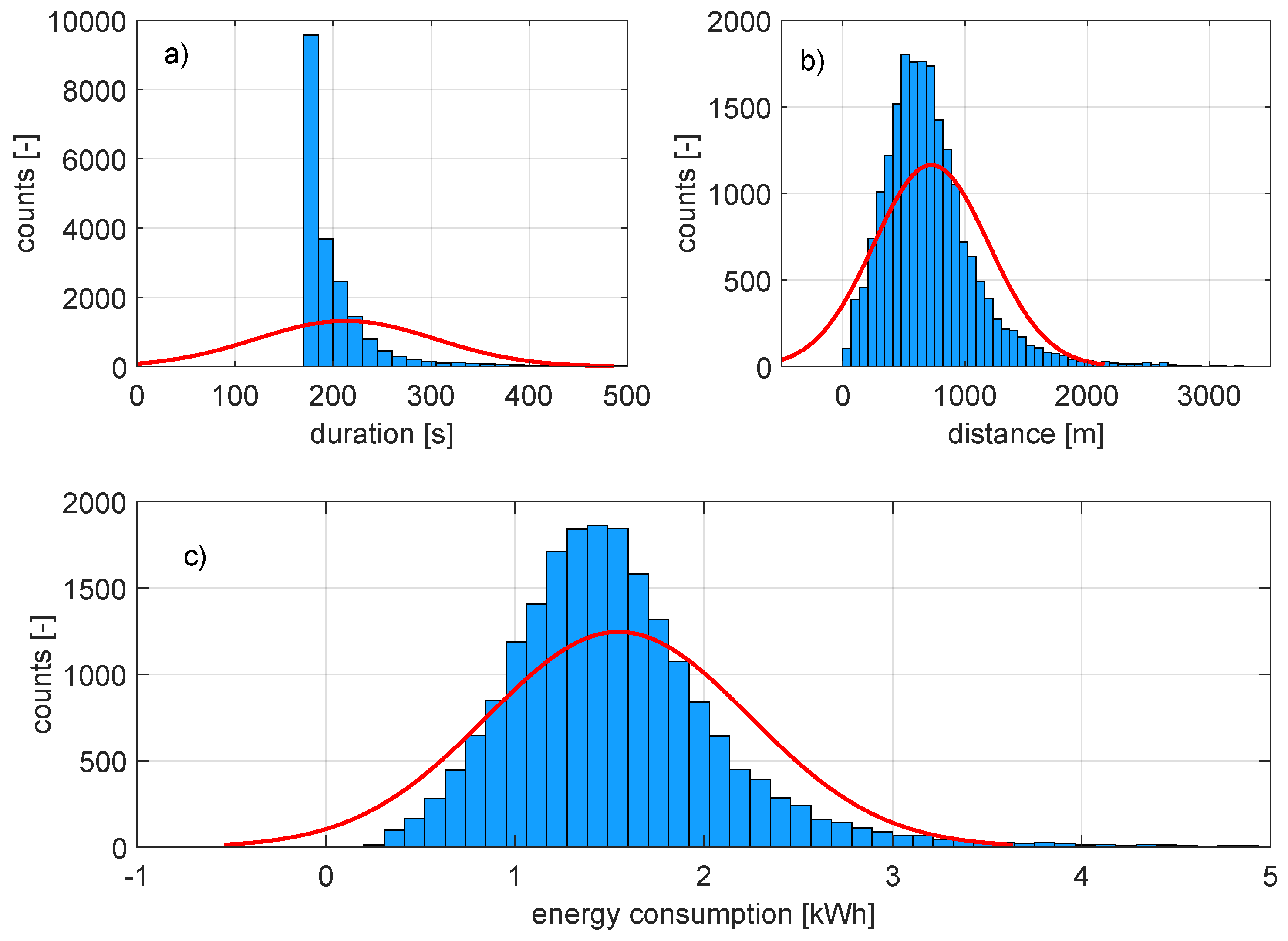
2.2. Segmentation into Microtrips
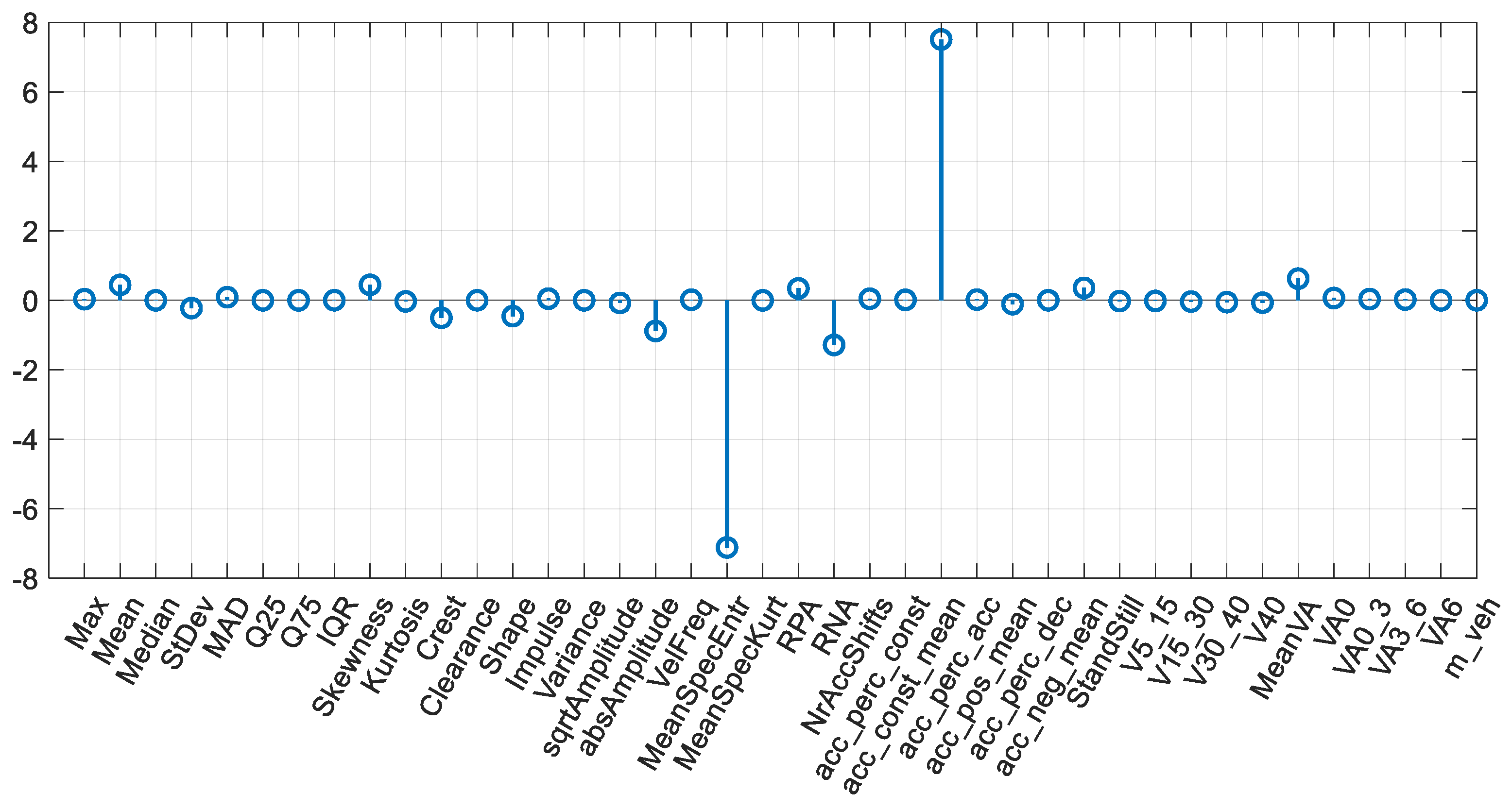
2.3. Feature Extraction
2.4. Prediction Model
3. Experiments
3.1. MLR Development
3.2. Prediction Results
4. Discussion
5. Conclusions
- Reliable and affordable public transportation;
- Improved quality of inner-city climate;
- Overall resource effectiveness and sustainability.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Directorate-General for Mobility and Transport (European Commission). EU Transport in Figures: Statistical Pocketbook 2019; Publications Office of the European Union: Luxembourg, 2019. [CrossRef]
- European Parliament, Council of the European Union Directive 2009/33/EC of the European Parliament and of the Council of 23 April 2009 on the Promotion of Clean and Energy-Efficient Road Transport Vehicles. 2009. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2009:120:0005:0012:En:PDF (accessed on 30 April 2023).
- Hertzke, P.; Müller, N.; Schenk, S.; Wu, T. The Global Electric-Vehicle Market is Amped up and on the Rise. EV-Volumes.com; McKinsey Analysis. 2018. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/the-global-electric-vehicle-market-is-amped-up-and-on-the-rise (accessed on 30 April 2023).
- Braun, A.; Rid, W. Energy consumption of an electric and an internal combustion passenger car. A comparative case study from real world data on the Erfurt circuit in Germany. Transp. Res. Procedia 2017, 27, 468–475. [Google Scholar] [CrossRef]
- Propfe, B.; Redelbach, M.; Santini, D.; Friedrich, H. Cost analysis of Plug-in Hybrid Electric Vehicles including Maintenance & Repair Costs and Resale Values. World Electr. Veh. J. 2022, 5, 886–895. [Google Scholar] [CrossRef]
- Keller, V.; Lyseng, B.; Wade, C.; Scholtysik, S.; Fowler, M.; Donald, J.; Palmer-Wilson, K.; Robertson, B.; Wild, P.; Rowe, A. Electricity system and emission impact of direct and indirect electrification of heavy-duty transportation. Energy 2019, 172, 740–751. [Google Scholar] [CrossRef]
- Koroma, M.S.; Costa, D.; Philippot, M.; Cardellini, G.; Hosen, M.S.; Coosemans, T.; Messagie, M. Life cycle assessment of battery electric vehicles: Implications of future electricity mix and different battery end-of-life management. Sci. Total Environ. 2022, 831, 154859. [Google Scholar] [CrossRef] [PubMed]
- Kalghatgi, G. Is it really the end of internal combustion engines and petroleum in transport? Appl. Energy 2018, 225, 965–974. [Google Scholar] [CrossRef]
- König, A.; Nicoletti, L.; Schröder, D.; Wolff, S.; Waclaw, A.; Lienkamp, M. An Overview of Parameter and Cost for Battery Electric Vehicles. World Electr. Veh. J. 2021, 12, 21. [Google Scholar] [CrossRef]
- Lajunen, A.; Lipman, T. Lifecycle cost assessment and carbon dioxide emissions of diesel, natural gas, hybrid electric, fuel cell hybrid and electric transit buses. Energy 2016, 106, 329–342. [Google Scholar] [CrossRef]
- Sennefelder, R.M.; Micek, P.; Martin-Clemente, R.; Risquez, J.C.; Carvajal, R.; Carrillo-Castrillo, J.A. Driving Cycle Synthesis, Aiming for Realness, by Extending Real-World Driving Databases. IEEE Access 2022, 10, 54123–54135. [Google Scholar] [CrossRef]
- Asamer, J.; Graser, A.; Heilmann, B.; Ruthmair, M. Sensitivity analysis for energy demand estimation of electric vehicles. Transp. Res. Part Transp. Environ. 2016, 46, 182–199. [Google Scholar] [CrossRef]
- De Cauwer, C.; Van Mierlo, J.; Coosemans, T. Energy Consumption Prediction for Electric Vehicles Based on Real-World Data. Energies 2015, 8, 8573–8593. [Google Scholar] [CrossRef]
- Gallet, M.; Massier, T.; Hamacher, T. Estimation of the energy demand of electric buses based on real-world data for large-scale public transport networks. Appl. Energy 2018, 230, 344–356. [Google Scholar] [CrossRef]
- Wang, J.; Besselink, I.; Nijmeijer, H. Battery electric vehicle energy consumption modelling for range estimation. Int. J. Electr. Hybrid Veh. 2017, 9, 79–102. [Google Scholar] [CrossRef]
- Beckers, C.; Besselink, I.; Frints, J.; Nijmeijer, H. Energy consumption prediction for electric city buses. In Proceedings of the 13th ITS European Congress, Brainport, The Netherlands, 3–6 June 2019; pp. 3–6. [Google Scholar]
- Hjelkrem, O.A.; Lervåg, K.Y.; Babri, S.; Lu, C.; Södersten, C.J. A battery electric bus energy consumption model for strategic purposes: Validation of a proposed model structure with data from bus fleets in China and Norway. Transp. Res. Part D Transp. Environ. 2021, 94, 102804. [Google Scholar] [CrossRef]
- Maybury, L.; Corcoran, P.; Cipcigan, L. Mathematical modelling of electric vehicle adoption: A systematic literature review. Transp. Res. Part D Transp. Environ. 2022, 107, 103278. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, G.; Sun, R.; Dubey, A.; Laszka, A.; Pugliese, P. A Review and Outlook on Energy Consumption Estimation Models for Electric Vehicles. Sae Int. J. Sustain. Transp. Energy Environ. Policy 2021, 2, 79–96. [Google Scholar] [CrossRef]
- Lajunen, A. Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transp. Res. Part Emerg. Technol. 2014, 38, 1–15. [Google Scholar] [CrossRef]
- Vepsäläinen, J.; Otto, K.; Lajunen, A.; Tammi, K. Computationally efficient model for energy demand prediction of electric city bus in varying operating conditions. Energy 2019, 169, 433–443. [Google Scholar] [CrossRef]
- Abdelaty, H.; Mohamed, M. A Prediction Model for Battery Electric Bus Energy Consumption in Transit. Energies 2021, 14, 2824. [Google Scholar] [CrossRef]
- Abdelaty, H.; Al-Obaidi, A.; Mohamed, M.; Farag, H.E. Machine learning prediction models for battery-electric bus energy consumption in transit. Transp. Res. Part D Transp. Environ. 2021, 96, 102868. [Google Scholar] [CrossRef]
- Pamuła, T.; Pamuła, D. Prediction of Electric Buses Energy Consumption from Trip Parameters Using Deep Learning. Energies 2022, 15, 1747. [Google Scholar] [CrossRef]
- Abdelaty, H.; Mohamed, M. A framework for BEB energy prediction using low-resolution open-source data-driven model. Transp. Res. Part D Transp. Environ. 2022, 103, 103170. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Sanchez-Diaz, I. Electric vehicle routing problem with machine learning for energy prediction. Transp. Res. Part Methodol. 2021, 145, 24–55. [Google Scholar] [CrossRef]
- Sun, C.; Sun, F.; He, H. Investigating adaptive-ECMS with velocity forecast ability for hybrid electric vehicles. Appl. Energy 2017, 185, 1644–1653. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Gao, J.; Lei, Z.; Zhang, Y.; Chen, Z. Prediction of vehicle driving conditions with incorporation of stochastic forecasting and machine learning and a case study in energy management of plug-in hybrid electric vehicles. Mech. Syst. Signal Process. 2021, 158, 107765. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Ebrahim, A.; Mohammed, O. Real-Time metadata-driven routing optimization for electric vehicle energy consumption minimization using deep reinforcement learning and Markov chain model. Electr. Power Syst. Res. 2021, 192, 106962. [Google Scholar] [CrossRef]
- Kontou, A.; Miles, J. Electric Buses: Lessons to be Learnt from the Milton Keynes Demonstration Project. Procedia Eng. 2015, 118, 1137–1144. [Google Scholar] [CrossRef]
- Ericsson, E. Independent driving pattern factors and their influence on fuel-use and exhaust emission factors. Transp. Res. Part D Transp. Environ. 2001, 6, 325–345. [Google Scholar] [CrossRef]
- Simonis, C.; Sennefelder, R. Route specific Driver Characterization for Data-Based Range Prediction of Battery Electric Vehicles. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Y.; Zhang, Y.; Zhang, Y.; Zhang, K. Prediction of electric bus energy consumption with stochastic speed profile generation modelling and data driven method based on real-world big data. Appl. Energy 2021, 298, 117204. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Sun, R. Data-driven estimation of energy consumption for electric bus under real-world driving conditions. Transp. Res. Part D Transp. Environ. 2021, 98, 102969. [Google Scholar] [CrossRef]
- Hahn, B.H.; Valentine, D.T. Essential MATLAB for Engineers and Scientists; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Markel, T.; Brooker, A.; Hendricks, T.; Johnson, V.; Kelly, K.; Kramer, B.; O’Keefe, M.; Sprik, S.; Wipke, K. ADVISOR: A systems analysis tool for advanced vehicle modeling. J. Power Sources 2022, 110, 255–266. [Google Scholar] [CrossRef]
- Rajamani, R. Longitudinal Vehicle Dynamics. In Vehicle Dynamics and Control; Springer: New York, NY, USA, 2006; pp. 95–122. [Google Scholar] [CrossRef]
- Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies 2018, 11, 1755. [Google Scholar] [CrossRef]
- Göhlich, D.; Fay, T.A.; Jefferies, D.; Lauth, E.; Kunith, A.; Zhang, X. Design of urban electric bus systems. Des. Sci. 2018, 4. [Google Scholar] [CrossRef]
- Gao, Z.; Lin, Z.; LaClair, T.J.; Liu, C.; Li, J.M.; Birky, A.K.; Ward, J. Battery capacity and recharging needs for electric buses in city transit service. Energy 2017, 122, 588–600. [Google Scholar] [CrossRef]
- Göhlich, D.; Kunith, A.; Ly, T.A. Technology Assessment of an Electric Urban Bus System for Berlin; WIT Press: Southampton, UK, 2014; Volume 138. [Google Scholar] [CrossRef]
- Barlow, T.; Latham, S.; McCrae, I.S.; Boulter, P. A reference book of driving cycles for use in the measurement of road vehicle emissions. In TRL Published Project Report; TRL Limited: Wokingham, UK, 2009. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/4247/ppr-354.pdf (accessed on 30 April 2023).
- Fomunung, I.; Washington, S.; Guensler, R. A statistical model for estimating oxides of nitrogen emissions from light duty motor vehicles. Transp. Res. Part D Transp. Environ. 1999, 4, 333–352. [Google Scholar] [CrossRef]
- Huang, D.; Xie, H.; Ma, H.; Sun, Q. Driving cycle prediction model based on bus route features. Transp. Res. Part D Transp. Environ. 2017, 54, 99–113. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Name | Symbol | Unit |
|---|---|---|
| Maximum Speed | Max | km/h |
| Mean Speed | Mean | km/h |
| Median Speed | Median | km/h |
| 25th Percentile | Q25 | km/h |
| 75th Percentile | Q75 | km/h |
| Inter Quartile Range | IQR | km/h |
| Standstill | v0 | % |
| Percentage of time in which km/h | v5_15 | % |
| Percentage of time in which km/h | v15_30 | % |
| Percentage of time in which km/h | v30_40 | % |
| Percentage of time in which km/h | v40 | % |
| Standard Deviation | StDev | km/h |
| Variance | vvariance | |
| Mean Absolute Deviation | MAD | km/h |
| Skewness | vskewness | - |
| Kurtosis | vkurtosis | - |
| Crest | vcrest | |
| Clearance | vclearance | |
| Shape | vshape | |
| Impulse | vimpulse | |
| Sqrt. Amplitude | ||
| Abs. Amplitude | ||
| Spectral Entropy | ventropy | - |
| Velocity Oscillation | vfreq | - |
| Number of Acceleration Shifts | nracc_shifts | - |
| Spectral Kurtosis | MeanSpecKurt | - |
| Percentage Constant Drive | accperc_const | % |
| Mean acceleration constant drive | accconst_mean | m/s2 |
| Percentage Accelerating | accperc_acc | % |
| Mean acceleration | accpos_mean | m/s2 |
| Percentage Decelerating | accperc_dec | % |
| Mean deceleration | accneg_mean | m/s2 |
| Relative Positive Acceleration | RPA | m/s2 |
| Relative Negative Acceleration | RNA | m/s2 |
| 1 Average | MeanVA | m2/s3 |
| 1 Percentage of time m2/s3 | va0 | % |
| 1 Percentage of time when m2/s3 | va0_3 | % |
| 1 Percentage of time when m2/s3 | va3_6 | % |
| 1 Percentage of time when m2/s3 | va6 | % |
| Total Mass (curb weight plus passengers) | mtotal | kg |
| SumSq | DF | MeanSq | F | p-Value | |
|---|---|---|---|---|---|
| Total | 7654.5 | 15220 | 0.50292 | ||
| Model | 6469.9 | 40 | 174.86 | 2241.3 | 0 |
| Residual | 1184.6 | 15180 | 0.07802 |
| MLR | Training | Test |
|---|---|---|
| r2 | 0.83 | 0.85 |
| RMSE | 0.35 | 0.27 |
| MSE | 0.12 | 0.07 |
| MAE | 0.18 | 0.18 |
| MLR | Mean Error | Std. Error | IQR | Overprediction |
|---|---|---|---|---|
| 0.0015 | 0.27 | 0.27 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sennefelder, R.M.; Martín-Clemente, R.; González-Carvajal, R. Energy Consumption Prediction of Electric City Buses Using Multiple Linear Regression. Energies 2023, 16, 4365. https://doi.org/10.3390/en16114365
Sennefelder RM, Martín-Clemente R, González-Carvajal R. Energy Consumption Prediction of Electric City Buses Using Multiple Linear Regression. Energies. 2023; 16(11):4365. https://doi.org/10.3390/en16114365
Chicago/Turabian StyleSennefelder, Roman Michael, Rubén Martín-Clemente, and Ramón González-Carvajal. 2023. "Energy Consumption Prediction of Electric City Buses Using Multiple Linear Regression" Energies 16, no. 11: 4365. https://doi.org/10.3390/en16114365
APA StyleSennefelder, R. M., Martín-Clemente, R., & González-Carvajal, R. (2023). Energy Consumption Prediction of Electric City Buses Using Multiple Linear Regression. Energies, 16(11), 4365. https://doi.org/10.3390/en16114365