



Integration of Intelligent Neighbourhood Grids to the German Distribution Grid: A Perspective
 ,
,  , , , and
, , , and
Abstract
1. Introduction
- Modelling of the neighbourhood grid according to the scenario.
- Modelling of the distribution grid according to the scenario.
- Combination of the neighbourhood grid and the distribution grid as a bi-level multi-objective optimisation problem.
- Proposing two methods to solve this problem using centralised and decentralised approach.
- Assessing the policy implications and design of experiments to test the approach experimentally.
2. Related Works
3. Problem Formulation
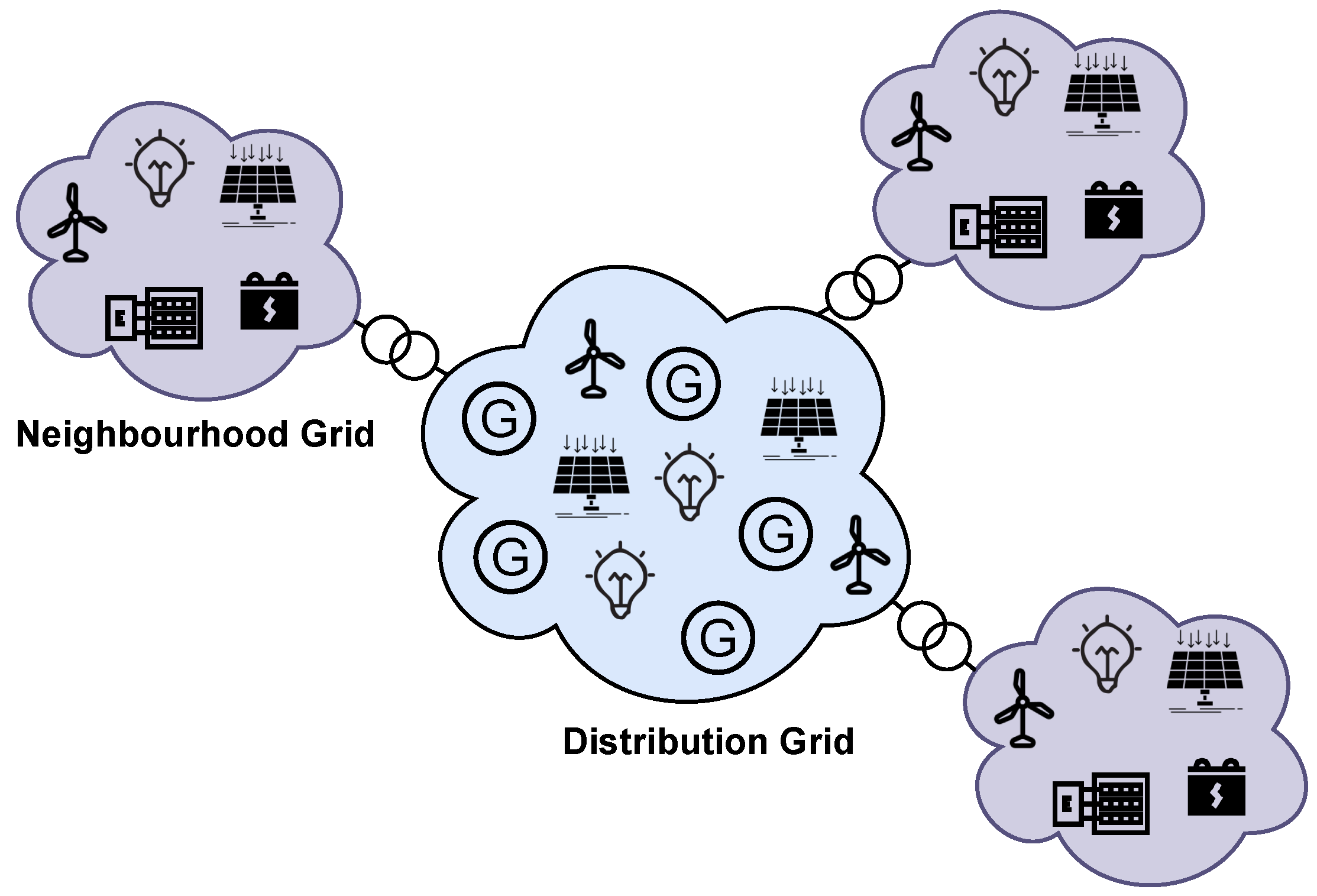
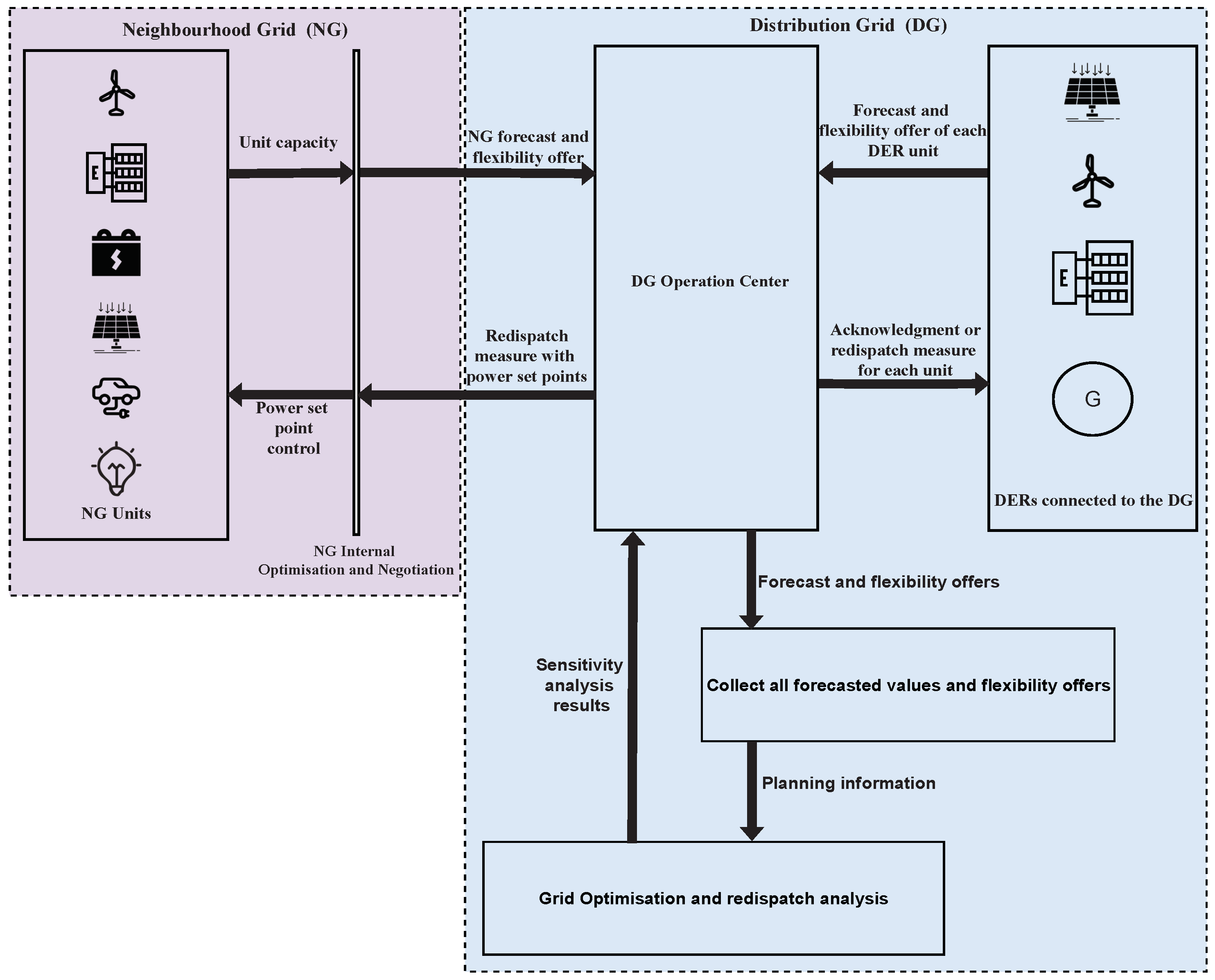
3.1. Scenario Description
3.2. Distribution Grid
3.2.1. Model Parameters
- (i)
- t∈: is defined as the time step. The time step is usually 15 min. This parameter is the same also for the neighbourhood grid.
- (ii)
- (iii)
- ∈: is defined as the number of generators that have to comply with a redispatch measurement at time t for every .
- (iv)
- ∈: represents the number of lines.
- (v)
- ∈: is a parameter that represents the resistance of the line.
- (vi)
- ∈: represents the number of non-renewable generators.
- (vii)
- ∈: is the cost of .
- (viii)
- ∈: is the Redispatch cost for the ith generator.
3.2.2. Decision Variables
- (i)
- ∈: is defined as the power generated by the ith generator that could be subject to redispatch measures at time t for , where represents the number of generators as defined in Section 3.2.1.
- (ii)
- ∈: represents the power loss in the ith line, for every time t. This is a calculation based on the results of the power flow.
- (iii)
- ∈: represents the energy generated by the ith non-renewable energy source.
3.2.3. Objectives
- (i)
- Minimise real power losses.where ∈ represents number of lines and ∈, represents the loss in the ith line. The is calculated using Ohm’s law as follows:where ∈ is the resistance of the line, which is a property of the type of cable or conductor used for every ith line.
- (ii)
- Minimise CO cost.∈, is the cost of for the generation of a unit of real power of each non-renewable generator and ∈, represents the energy generated by the ith non-renewable energy source. It is considered that the energy produced externally (generated by the slack bus) is provided from non-renewable sources for .
- (iii)
- Minimise Redispatch costs.where ∈, represents the number of generators, ∈ is the Redispatch cost for the ith generator. The Redispatch cost is non-time dependent. Note that it is possible to to change Redispatch cost to dynamic values. ∈, represents the power that could not be generated due to Redispatch measures. It is defined as followed:where ∈ represents the real power offered by every generator, connected to the distribution grid operator. is a function of the resources for each DER at time t for . For example, for photovoltaic systems is a function of the solar irradiance and for wind turbines, it is a function of the wind speed. For other non-weather dependent generators, represents the maximum capacity of the unit for , when the other unit constrains are satisfied, which is described further in Section 3.3. Note that For the neighbourhood grids, is a result of the lower-level optimisation. ∈, represents the real power generated by the ith generator at time t for .
3.2.4. Constraints
- (i)
- Equality constraintswhere and , respectively, denote the active and reactive power generated by the ith generator, and , respectively, denote the active and reactive power consumed by the jth load and and denote the active and reactive power generated/consumed by the slack bus.
- (ii)
- Inequality constraints
3.3. Neighbourhood Grid
3.3.1. Model Parameters
- (i)
- ∈: number of household loads.
- (ii)
- ∈: number of photovoltaic generators.
- (iii)
- ∈: number of wind generators.
- (iv)
- ∈, power of the ith load at time t on households.
- (v)
- ∈, PV power of ith PV at time t.
- (vi)
- ∈, power of the wind generator at time t.
- (vii)
- ∈ is the cost of emission to generate unit energy.
- (viii)
- minimum state of charge allowed.
- (ix)
- maximum state of charge allowed ().
- (x)
- ∈: maximum energy generated by the CHP unit.
- (xi)
- sampling time (or time step).
- (xii)
- ∈, Forecast of the energy for the electric vehicles needed at time t.
- (xiii)
- ∈: state of charge of the battery at time t.
- (xiv)
- ∈: energy produced by the CHP unit at time t.
3.3.2. Decision Variables
- (i)
- ∈: flexibility power offer from CHP at time t.
- (ii)
- ∈: flexibility power offer from Battery at time t.
- (iii)
- ∈: flexibility power offer from e-mobility at time t.
3.3.3. Objectives
- (i)
- Maximise self-consumption/minimise energy supply from the distribution grid.where and , respectively, denote the number of loads and generators, denotes the power of the ith load, and , respectively, denote the power generated by ith PV plant and jth wind power plant. Further, , , and , denote the flexibilities that are offered to the distribution grid by the neighbourhood grid using the CHP unit, battery storage and electric vehicle (EV) charging, respectively.
- (ii)
- Maximise flexibility offers for Redispatch 2.0.where denotes the flexibility offered at time t and T denotes the Redispatch 2.0 time horizon which is usually h.
- (iii)
- Minimise emissions.
3.3.4. Constraints
- (i)
- Energy produced by the CHP unit is fed into the neighbourhood grid.where is the maximum power generated by the CHP. The dynamics of the CHP can be represented as:where represents the energy produced by the CHP unit.
- (ii)
- The e-mobility flexibilities are considered as load shifting, therefore the aggregated flexibility offered over the entire period is 0 so that the load equals the forecast by the end of the period T.
- (iii)
- Energy supplied/consumed by battery storage.where M is the capacity of the battery, is the state of charge of the battery, and are minimum and maximum state of charge (SoC) limits and represents the energy offer as a flexibility for that time period.
4. Solution Approach
4.1. Centralised Approach
4.2. Decentralised Approach
4.3. Evaluation
5. Policy Implications
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviation | Meaning |
| COHDA | Combinatorial Optimisation Heuristic for Distributed Agents |
| CHP | Combined Heat and Power |
| DERs | Distributed Energy Resources |
| DG | Distribution Grid |
| DSO | Distributed System Operator |
| F | Flexibility |
| G | Generators |
| KPIs | Key Performance Indicators |
| NG | Neighbourhood Grid |
| OCP | Optimal Control Problem |
| PV | Photovoltaic |
| SQP | Sequential Quadratic Programming |
| SoC | State of Charge |
References
- Mishra, P.; Vidyarthi, A.; Siano, P. Guest Editorial: Security and Privacy for Cloud-Assisted Internet of Things (IoT) and Smart Grid. IEEE Trans. Ind. Inform. 2022, 18, 4966–4968. [Google Scholar] [CrossRef]
- Chaudhry, S.A.; Nebhan, J.; Yahya, K.; Al-Turjman, F. A Privacy Enhanced Authentication Scheme for Securing Smart Grid Infrastructure. IEEE Trans. Ind. Inform. 2022, 18, 5000–5006. [Google Scholar] [CrossRef]
- Sanduleac, M.; Ciornei, V.I.; Toma, L.; Plamnescu, R.; Dumitrescu, A.M.; Albu, M. High Reporting Rate Smart Metering Data for Enhanced Grid Monitoring and Services for Energy Communities. IEEE Trans. Ind. Inform. 2022, 18, 4039–4048. [Google Scholar] [CrossRef]
- Kouvelas, N.; Prasad, R.V. Efficient Allocation of Harvested Energy at the Edge by Building a Tangible Micro-Grid—The Texas Case. IEEE Trans. Green Commun. Netw. 2021, 5, 94–105. [Google Scholar] [CrossRef]
- Kester, J. Conducting a smarter grid: Reflecting on the power and security behind smart grids with foucault. In Smart Grids from a Global Perspective: Bridging Old and New Energy Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 197–213. [Google Scholar]
- Mullen, S.; Onsongo, G. Decentralized agent-based underfrequency load shedding. Integr. Comput. Aided Eng. 2010, 17, 321–329. [Google Scholar] [CrossRef]
- Frank, S.; Steponavice, I.; Rebennack, S. Optimal power flow: A bibliographic survey I Formulations and deterministic methods. Energy Syst. 2012, 3, 221–258. [Google Scholar] [CrossRef]
- Kumar, Y.; Devabhaktuni, V.K.; Vemuru, S. Comparison of power system simulation tools with load flow study cases. IEEE Int. Conf. Electro Inf. Technol. 2015, 2015, 290–294. [Google Scholar]
- Kundur, P.; Balu, N.J.; Lauby, M. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Wanigasekara, C.; Swain, A.; Almakhles, D.; Zhou, L. Design of Delta–Sigma-Based PID Controller for Networked Wind Energy Conversion Systems. IEEE Trans. Ind. Appl. 2022, 58, 879–889. [Google Scholar] [CrossRef]
- Kashyap, M.; Kansal, S.; Verma, R. Sizing and Allocation of DGs in A Passive Distribution Network Under Various Loading Scenarios. Electr. Power Syst. Res. 2022, 209, 108046. [Google Scholar] [CrossRef]
- Alasvand Javadi, E.; Joorabian, M.; Barati, H. A bi-level optimization framework for resilience enhancement of electricity and natural gas networks with participation of energy hubs. Int. J. Electr. Power Energy Syst. 2022, 142, 108312. [Google Scholar] [CrossRef]
- Bracken, J.; Mcgill, J.T. Mathematical programs with optimization problems in constraints. Oper. Res. 1973, 21, 37–44. [Google Scholar] [CrossRef]
- Dempe, S. Foundations of Bilevel Programming; Springer Science & Business Media: Cham, Switzerland, 2002. [Google Scholar]
- Colson, B.; Marcotte, P.; Savard, G. An overview of bilevel optimization. Ann. Oper. Res. 2007, 153, 235–256. [Google Scholar] [CrossRef]
- Sinha, A.; Malo, P.; Deb, K. Towards understanding bilevel multi-objective optimization with deterministic lower level decisions. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization, Guimaraes, Portugal, 29 March–1 April 2015; pp. 426–443. [Google Scholar]
- Thirugnanam, K.; El Moursi, M.S.; Khadkikar, V.; Zeineldin, H.H.; Hosani, M.A. Energy Management Strategy of a Reconfigurable Grid-Tied Hybrid AC/DC Microgrid for Commercial Building Applications. IEEE Trans. Smart Grid 2022, 13, 1720–1738. [Google Scholar] [CrossRef]
- Tziovani, L.; Hadjidemetriou, L.; Kolios, P.; Astolfi, A.; Kyriakides, E.; Timotheou, S. Energy Management and Control of Photovoltaic and Storage Systems in Active Distribution Grids. IEEE Trans. Power Syst. 2022, 37, 1956–1968. [Google Scholar] [CrossRef]
- Ehrgott, M. Multicriteria Optimization; Springer Science & Business Media: Cham, Switzerland, 2005; Volume 491. [Google Scholar]
- Eichfelder, G. Adaptive Scalarization Methods in Multiobjective Optimization; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Miettinen, K. Nonlinear Multiobjective Optimization; Springer Science & Business Media: Cham, Switzerland, 2012; Volume 12. [Google Scholar]
- Kreutziger, M.; Wende-von Berg, S.; Krahmer, S.; Schegner, P. Provision of reactive power from wide area distribution grids—Practical implementation in a field test. Elektrotech. Informationstech. 2022, 139, 65–72. [Google Scholar] [CrossRef]
- Linnemann, M. Redispatch 2.0 challenge: Improved airbag for grid stability. BWK Energ. Fachmag. 2021, 73, 12–13. [Google Scholar] [CrossRef]
- Wehkamp, S.; Schmeling, L.; Vorspel, L.; Roelcke, F.; Windmeier, K.L. District Energy Systems: Challenges and New Tools for Planning and Evaluation. Energies 2020, 13, 2967. [Google Scholar] [CrossRef]
- Poplavskaya, K.; Totschnig, G.; Leimgruber, F.; Doorman, G.; Etienne, G.; De Vries, L. Integration of day-ahead market and redispatch to increase cross-border exchanges in the European electricity market. Appl. Energy 2020, 278, 115669. [Google Scholar] [CrossRef]
- De Oliveira, R.; de Oliveira, L.W.; de Oliveira, E.J. Optimization Approach for Planning Soft Open Points in a MV-Distribution System to Maximize the Hosting Capacity. Energies 2023, 16, 1035. [Google Scholar] [CrossRef]
- Ferdowsi, A.; DehghanChenary, M.; Jolai, F.; Tavakkoli-Moghaddam, R. Toward unraveling multi-objective optimization problems: A hybrid approach for solving a novel facility location problem. TechRxiv, 2022; preprint. [Google Scholar]
- Abdelmalak, M.; Benidris, M. Proactive generation redispatch strategy considering unavailability of renewable energy sources during hurricanes. In Proceedings of the 2021 IEEE Industry Applications Society Annual Meeting (IAS), Vancouver, BC, Canada, 10–14 October 2021; pp. 1–6. [Google Scholar]
- Hu, D.; Wang, T. Optimizing Power Demand Side Response Strategy: A Study Based on Double Master –Slave Game Model of Multi-Objective Multi-Universe Optimization. Energies 2023, 16, 4009. [Google Scholar]
- Grisales-Noreña, L.F.; Montoya, O.D.; Perea-Moreno, A.J. Optimal Integration of Battery Systems in Grid-Connected Networks for Reducing Energy Losses and CO2 Emissions. Mathematics 2023, 11, 1604. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, X.; Li, Y.; Zeng, Z.; Yong, C.; Sidorov, D.; Lv, X. Two-stage active and reactive power coordinated optimal dispatch for active distribution network considering load flexibility. Energies 2020, 13, 5922. [Google Scholar] [CrossRef]
- Rocha, R.; Silva, R.; Mello, J.; Faria, S.; Retorta, F.; Gouveia, C.; Villar, J. A Three-Stage Model to Manage Energy Communities, Share Benefits and Provide Local Grid Services. Energies 2023, 16, 1143. [Google Scholar] [CrossRef]
- Zatti, M.; Martelli, E.; Amaldi, E. A three-stage stochastic optimization model for the design of smart energy districts under uncertainty. In Computer Aided Process Engineering; Elsevier: Amsterdam, The Netherlands, 2017; Volume 40, pp. 2389–2394. [Google Scholar]
- Gadhi, N.; Hamdaoui, K.; El Idrissi, M. Optimality conditions for a multiobjective bilevel optimization problem involving set valued constraints. Optimization 2021, 70, 2013–2029. [Google Scholar] [CrossRef]
- Ashoornezhad, A.; Falaghi, H.; Hajizadeh, A.; Ramezani, M. A bi-level multistage distribution network expansion planning framework with the cooperation of residential private investors (A case study in Iran). IET Renew. Power Gener. 2023, 17, 1881–1898. [Google Scholar] [CrossRef]
- Echeverri Martínez, R. A bi-level multi-objective optimization model for the planning, design and operation of smart grid projects. Case study: An islanded microgrid. Int. J. Energy Econ. Policy 2020, 10, 325–341. [Google Scholar] [CrossRef]
- Ning, Y.; Chen, K.; Zhang, B.; Ding, T.; Guo, F.; Zhang, M. Energy conservation and emission reduction path selection in China: A simulation based on bi-level multi-objective optimization model. Energy Policy 2020, 137, 111116. [Google Scholar] [CrossRef]
- Stojiljković, M.M. Bi-level multi-objective fuzzy design optimization of energy supply systems aided by problem-specific heuristics. Energy 2017, 137, 1231–1251. [Google Scholar] [CrossRef]
- Luo, X.; Liu, Y.; Liu, X. Bi-level multi-objective optimization of design and subsidies for standalone hybrid renewable energy systems: A novel approach based on artificial neural network. J. Build. Eng. 2021, 41, 102744. [Google Scholar] [CrossRef]
- Haghifam, S.; Dadashi, M.; Zare, K.; Seyedi, H. Optimal operation of smart distribution networks in the presence of demand response aggregators and microgrid owners: A multi follower Bi-Level approach. Sustain. Cities Soc. 2020, 55, 102033. [Google Scholar] [CrossRef]
- Fateh, H.; Safari, A.; Bahramara, S. A bi-level optimization approach for optimal operation of distribution networks with retailers and micro-grids. J. Oper. Autom. Power Eng. 2020, 8, 15–21. [Google Scholar]
- Büskens, C.; Wassel, D. The ESA NLP Solver WORHP. In Modeling and Optimization in Space Engineering; Fasano, G., Pintér, J.D., Eds.; Springer: New York, NY, USA, 2013; Volume 73, pp. 85–110. [Google Scholar]
- Dell’Aere, A. Numerical Methods for the Solution of Bi-Level Multi-Objective Optimization Problems. Ph.D. Thesis, Universitaet Paderborn, Paderborn, Germany, 2008. [Google Scholar]
- Kuhlmann, R.; Geffken, S.; Büskens, C. WORHP Zen: Parametric Sensitivity Analysis for the Nonlinear Programming Solver WORHP. In Proceedings of the Operations Research Proceedings 2017, Berlin, Germany, 6–8 September 2017; Kliewer, N., Ehmke, J.F., Borndörfer, R., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 649–654. [Google Scholar]
- Hinrichs, C.; Lehnhoff, S.; Sonnenschein, M. COHDA: A combinatorial optimization heuristic for distributed agents. In Proceedings of the International Conference on Agents and Artificial Intelligence, Barcelona, Spain, 15–18 February 2013; pp. 23–39. [Google Scholar]
- Bremer, J.; Lehnhoff, S. Towards fully decentralized multi-objective energy scheduling. In Proceedings of the 2019 Federated Conference on Computer Science and Information Systems (FedCSIS), Leipzig, Germany, 1–4 September 2019; pp. 193–201. [Google Scholar]
- Steinbrink, C.; Blank-Babazadeh, M.; El-Ama, A.; Holly, S.; Lüers, B.; Nebel-Wenner, M.; Ramírez Acosta, R.; Raub, T.; Schwarz, J.S.; Stark, S.; et al. CPES Testing with mosaik: Co-Simulation Planning, Execution and Analysis. Appl. Sci. 2019, 9, 923. [Google Scholar] [CrossRef]
- Ofenloch, A.; Schwarz, J.S.; Tolk, D.; Brandt, T.; Eilers, R.; Ramirez, R.; Raub, T.; Lehnhoff, S. MOSAIK 3.0: Combining Time-Stepped and Discrete Event Simulation. In Proceedings of the 2022 Open Source Modelling and Simulation of Energy Systems (OSMSES), Aachen, Germany, 4–5 April 2022; pp. 1–5. [Google Scholar]
- Brazier, R.; De Luca, E.; de Wit, P.; Eklund, H.; Gimeno, C.; Herbretau, S.; Zawadska, K. Smart Grid Key Performance Indicators: A DSO Perspective. 2022. Available online: https://cdn.eurelectric.org/media/5272/smart_grid_key_performance_indicators__a_dso_perspective-2021-030-0129-01-e-h-B85F16BF.pdf (accessed on 1 April 2023).
- Okwuibe, G.C.; Gazafroudi, A.S.; Hambridge, S.; Dietrich, C.; Trbovich, A.; Shafie-khah, M.; Tzscheutschler, P.; Hamacher, T. Evaluation of Hierarchical, Multi-Agent, Community-Based, Local Energy Markets Based on Key Performance Indicators. Energies 2022, 15, 3575. [Google Scholar] [CrossRef]
- Harder, W.J. Key Performance Indicators for Smart Grids Master Thesis on Performance Measurement for Smart Grids. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2017. [Google Scholar]
- Vita, V.; Christodoulou, C.; Zafeiropoulos, I.; Gonos, I.; Asprou, M.; Kyriakides, E. Evaluating the flexibility benefits of smart grid innovations in transmission networks. Appl. Sci. 2021, 11, 10692. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Key Performance Indicator | Meaning | Source |
|---|---|---|
| Activation rate of Redispatch to avoid grid congestions from the DGs perspective | Amount of activations needed to avoid grid congestions | Present Paper |
| Congestion solving capability | Performance in using distributed system operator (DSO) assets, DER’s and neighbourhood grids to execute congestion solving and percentage reduction of overloaded lines using the flexibility | [49] |
| Community self-sufficiency | Percentage of electricity demanded by the local community agents that is produced within the community | [50] |
| Demand flexibility | The amount of load that can be shifted temporally at each time step | [51] |
| Degree of curtailment | Percentage of curtailment from the generation | [52] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acosta, R.R.; Wanigasekara, C.; Frost, E.; Brandt, T.; Lehnhoff, S.; Büskens, C. Integration of Intelligent Neighbourhood Grids to the German Distribution Grid: A Perspective. Energies 2023, 16, 4319. https://doi.org/10.3390/en16114319
Acosta RR, Wanigasekara C, Frost E, Brandt T, Lehnhoff S, Büskens C. Integration of Intelligent Neighbourhood Grids to the German Distribution Grid: A Perspective. Energies. 2023; 16(11):4319. https://doi.org/10.3390/en16114319
Chicago/Turabian StyleAcosta, Rebeca Ramirez, Chathura Wanigasekara, Emilie Frost, Tobias Brandt, Sebastian Lehnhoff, and Christof Büskens. 2023. "Integration of Intelligent Neighbourhood Grids to the German Distribution Grid: A Perspective" Energies 16, no. 11: 4319. https://doi.org/10.3390/en16114319
APA StyleAcosta, R. R., Wanigasekara, C., Frost, E., Brandt, T., Lehnhoff, S., & Büskens, C. (2023). Integration of Intelligent Neighbourhood Grids to the German Distribution Grid: A Perspective. Energies, 16(11), 4319. https://doi.org/10.3390/en16114319