
Development and Validation of the IAG Dynamic Stall Model in State-Space Representation for Wind Turbine Airfoils



Abstract
1. Introduction
- Transformation of the IAG dynamic stall model from the indicial formulation to the state-space representation.
- Improvements of the model robustness compared to the original IAG model. The present model is also constructed such that it contains fewer constants.
- Removal of the compressibility terms of the IAG dynamic stall model
- Extensive verification of the model for various data sets at different flow scenarios.
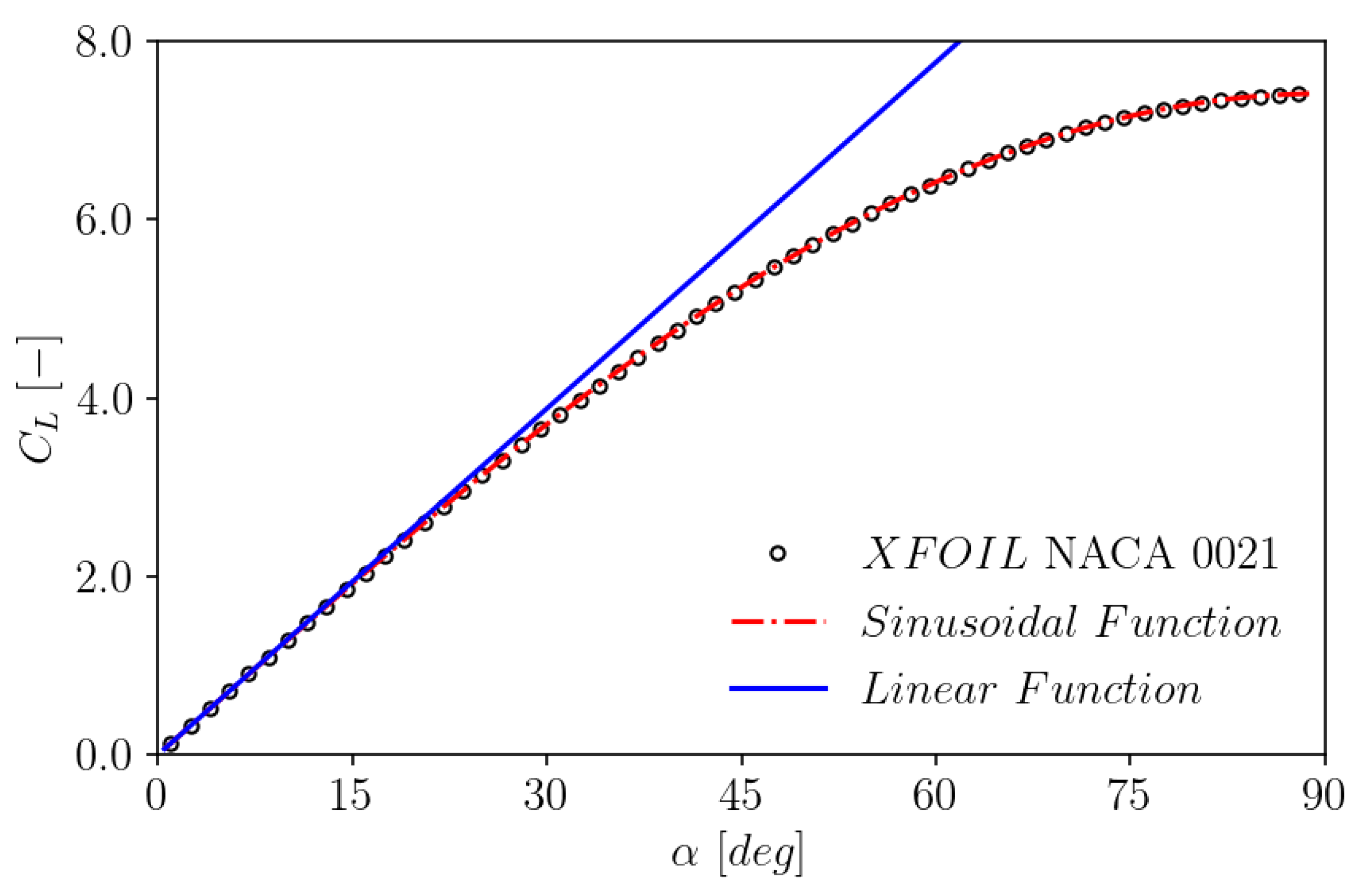
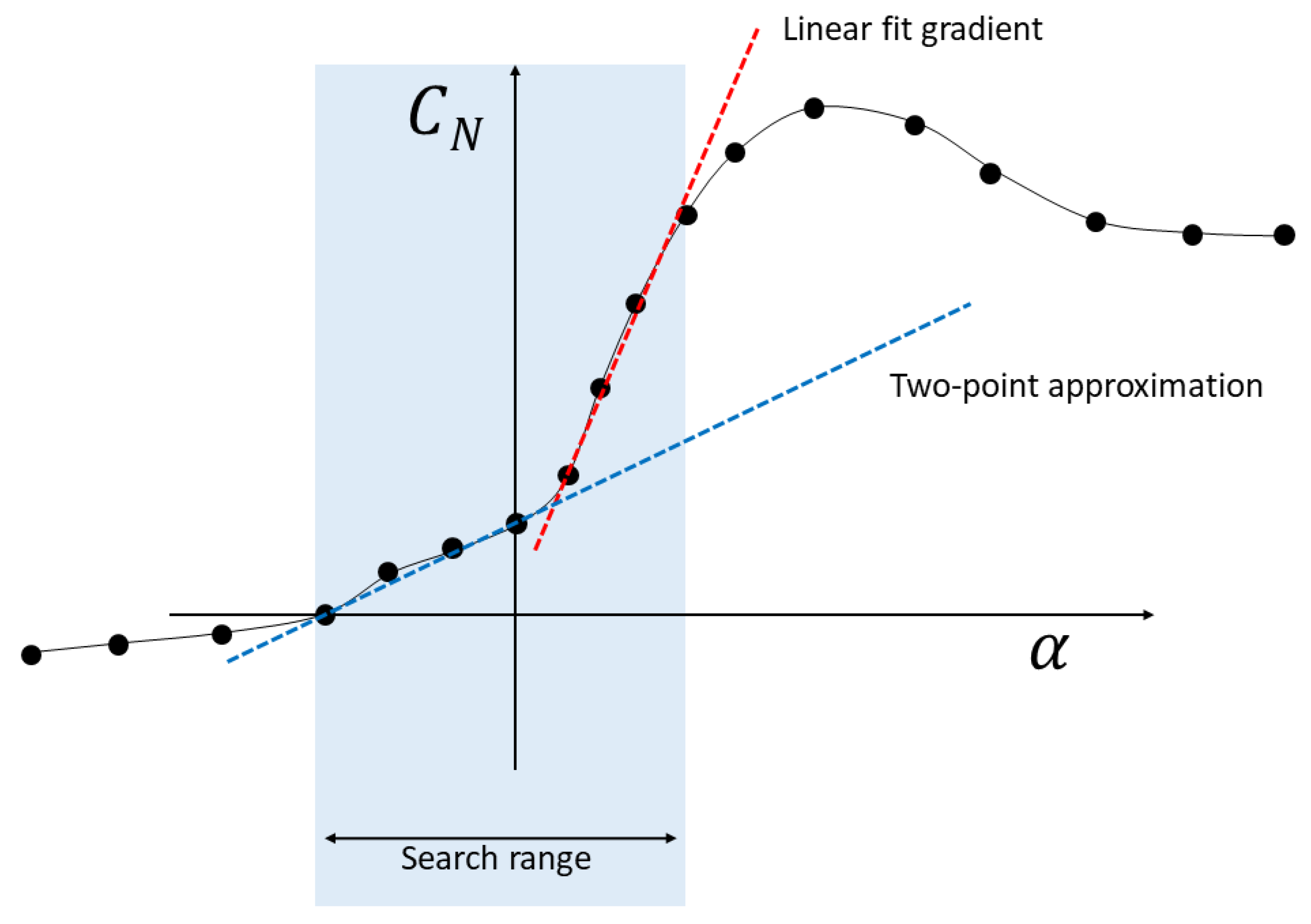
- Introduction of a method to automatically determinate the normal force gradient of a polar that is insensitive to data point outlier.
- Implementation of the IAG dynamic stall model in the wind turbine design tool Bladed.
- The present paper serves as the source of reference for academic readers interested in unsteady aerodynamics but also for engineering practitioners employing Bladed in designing and assessing their wind turbines.
2. Mathematical Foundation
2.1. IAG Model in Indicial Formulation
2.2. IAG Model in State-Space Representation
2.3. Adopted Constants
2.4. Automatic Determination of the Normal Force Gradient
3. Results and Discussion
3.1. Test Cases and Treatment of the Input Data
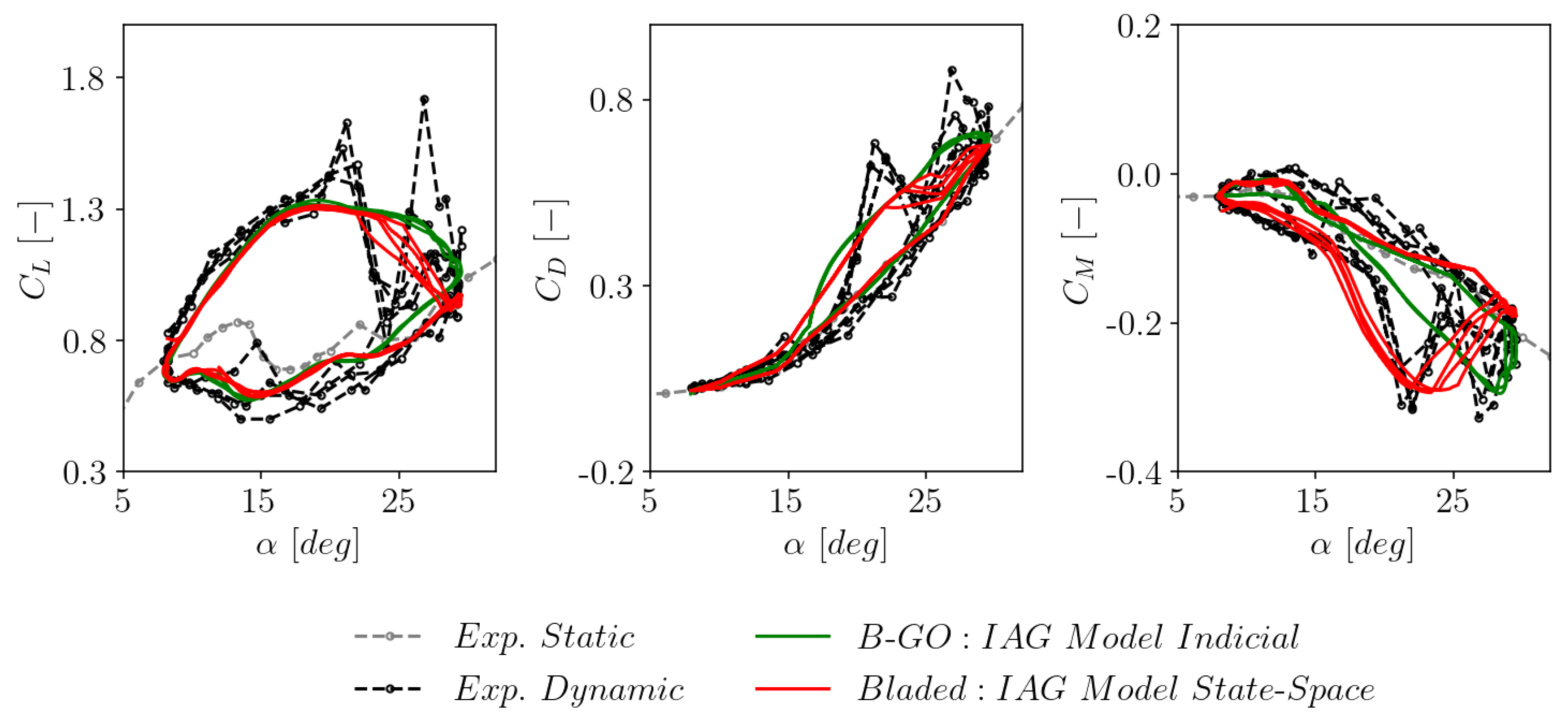
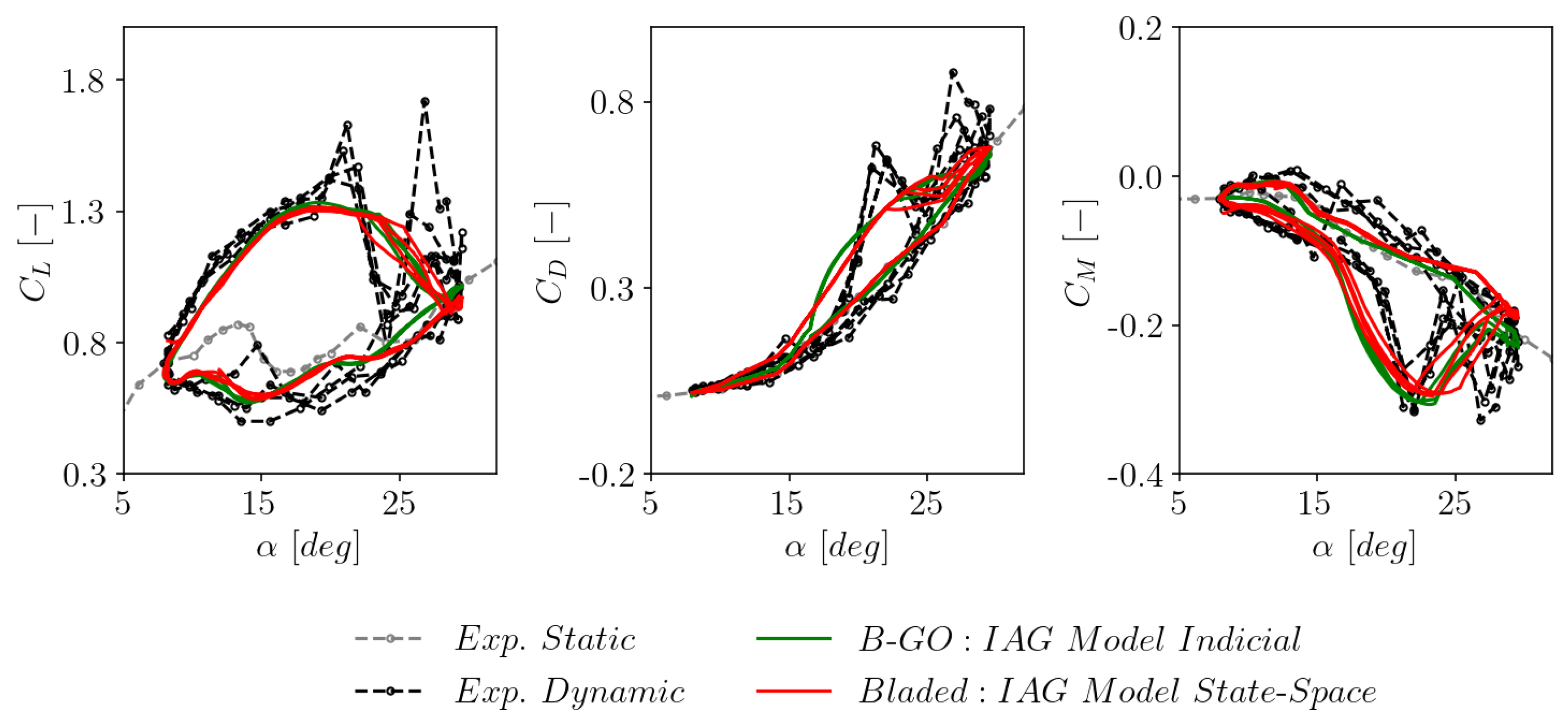
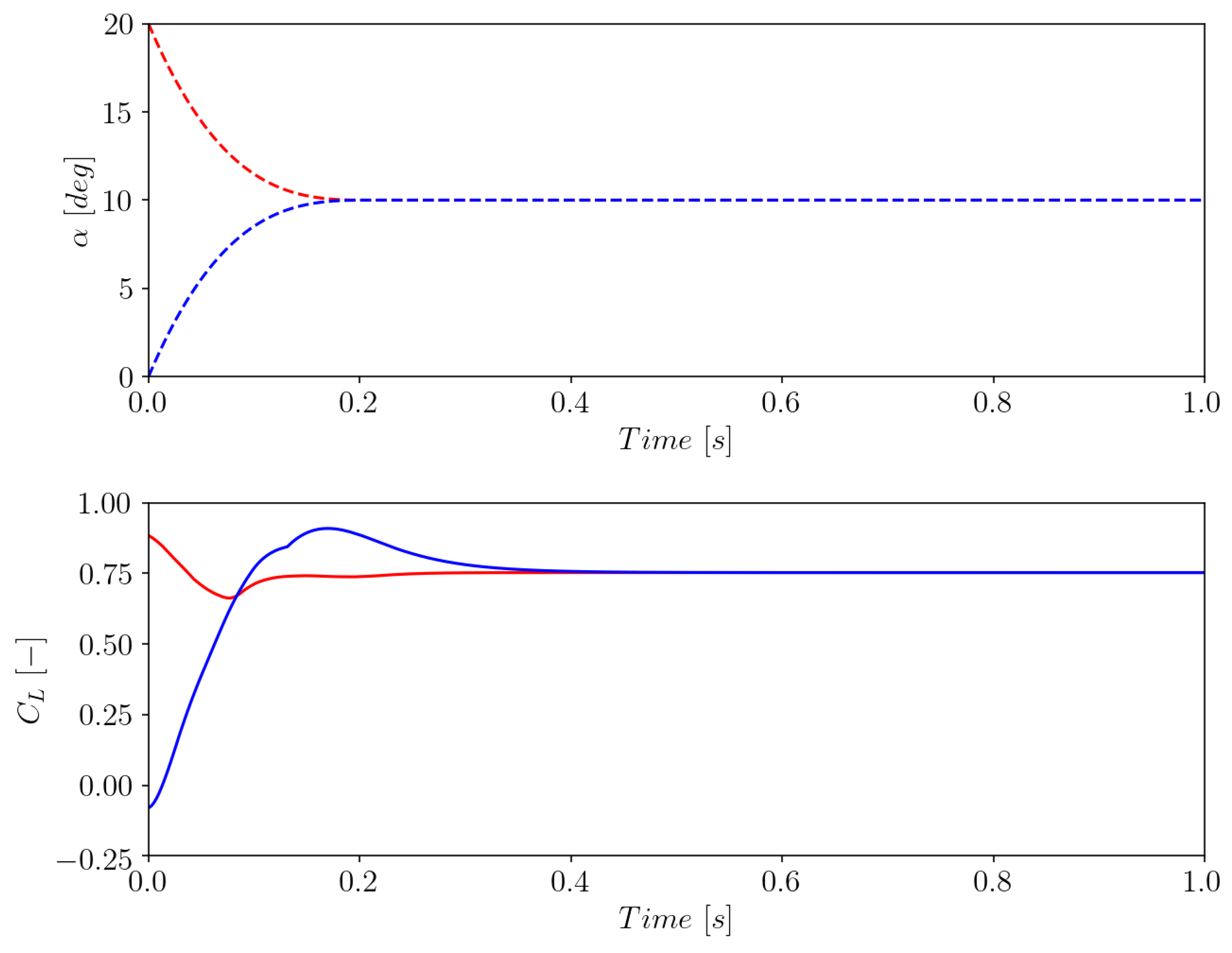
3.2. Consistency with the Original Indicial Formulation
3.3. The Effects of Mean Angle of Attack
3.4. The Effects of Reduced Frequency
3.5. The Effects of Excitation Amplitude
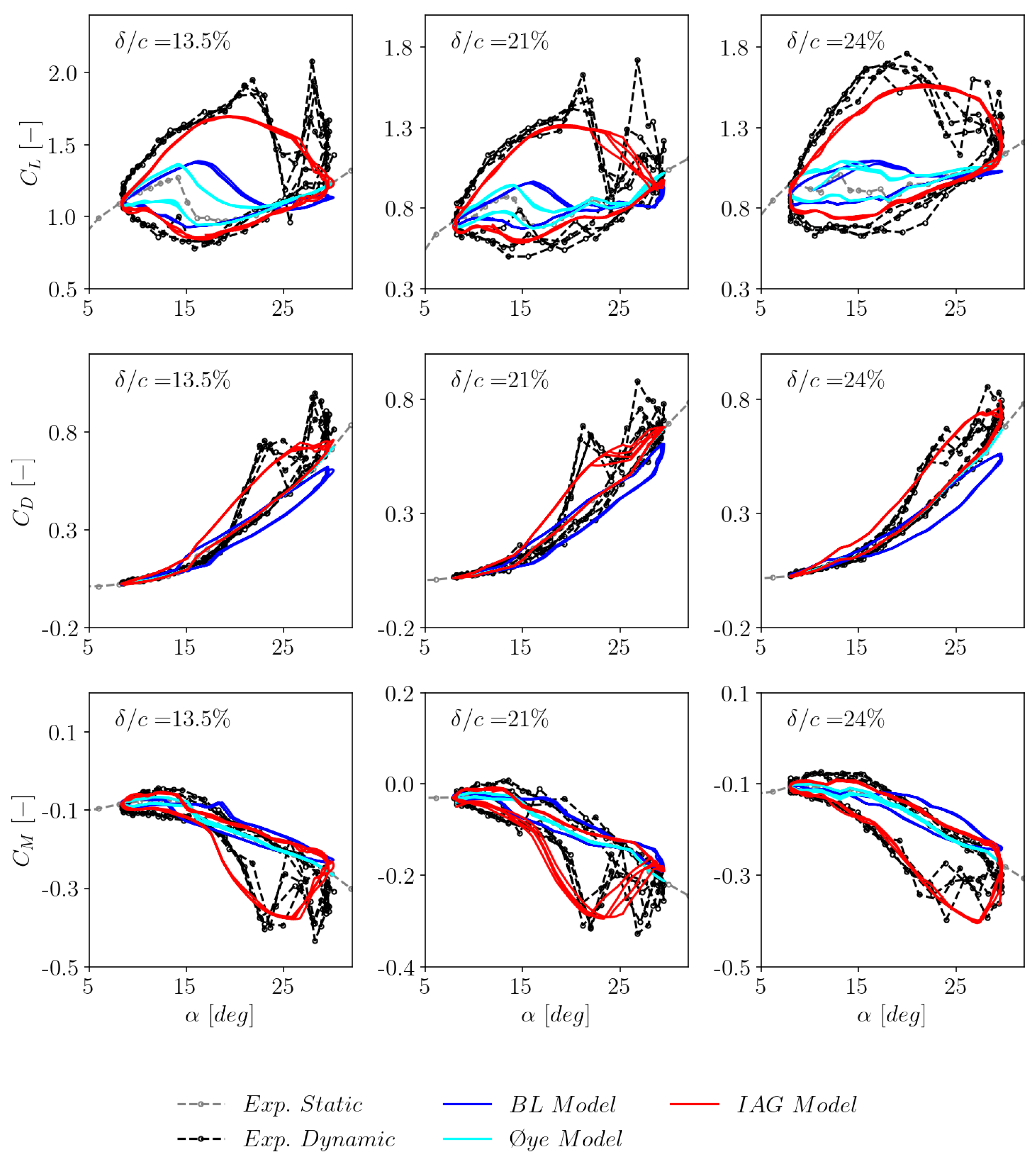
3.6. Sensitivity to Airfoil Thickness
3.7. Model Performance for Negative Stall
3.8. Sensitivity to Airfoil Surface Roughness
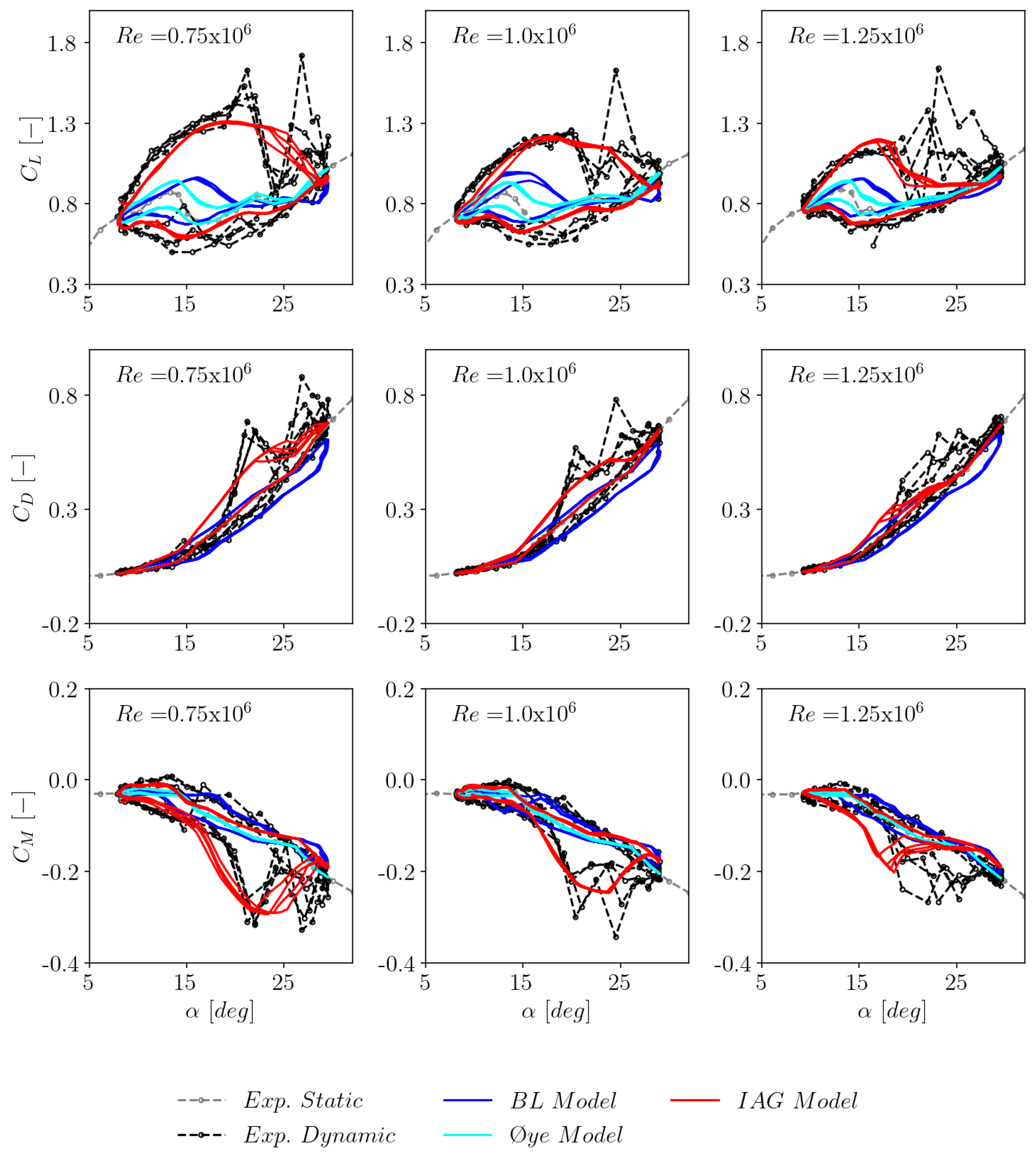
3.9. Sensitivity to Reynolds Number
3.10. Characteristics of Upstroke and Downstroke Motion
4. Conclusions and Outlook
- The state-space representation of the IAG model was successfully formulated.
- All the governing equations and assumptions are presented in a consistent manner to allow replication for future studies.
- The newly implemented IAG model clearly shows superior performance compared to the standard incompressible Beddoes–Leishman model and the Øye model in Bladed.
- The IAG model demonstrates a good accuracy against experimental data under various unsteady parameters, including the effects of mean angle of attack, reduced frequency and excitation amplitude.
- The IAG model results are able to be generalized to airfoils having different relative thicknesses.
- The performance of the IAG model is well validated for both clean airfoil and airfoil under the effects of surface roughness.
- The IAG model agrees well with the measurement data for three different values of the Reynolds number.
- The incompressible BL model prediction is deemed sufficient for small to moderate angle of attack cases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
- The following abbreviations are used in this manuscript:
| Variables | |
| s | nondimensional time (s) |
| V | incoming wind speed (m/s) |
| t | time (s) |
| c | chord (m) |
| normal force coefficient (−) | |
| tangential force coefficient (−) | |
| lift force coefficient (−) | |
| drag force coefficient (−) | |
| pitching moment coefficient (−) | |
| total inviscid normal force coefficient (−) | |
| time lagged total inviscid normal force coefficient (−) | |
| impulsive inviscid normal force coefficient (−) | |
| circulatory inviscid normal force coefficient (−) | |
| viscous normal force coefficient (−) | |
| viscous tangential force coefficient (−) | |
| viscous pitching moment coefficient (−) | |
| circulatory pitching moment coefficient (−) | |
| vortex lift normal force coefficient (−) | |
| critical normal force coefficient (−) | |
| stepping parameter moment (−) | |
| norm of error (−) | |
| f | frequency (Hz) |
| pitching frequency (Hz) | |
| separation factor (−) | |
| k | reduced frequency () (−) |
| M | Mach number (−) |
| deficiency functions (−) | |
| dynamic stall states (−) | |
| model constants (−) | |
| model constants (−) | |
| Greek letters | |
| angle of attack (rad (unless stated otherwise)) | |
| zero lift (rad (unless stated otherwise)) | |
| effective (rad (unless stated otherwise)) | |
| time lagged (rad (unless stated otherwise)) | |
| critical angle of attack (rad (unless stated otherwise)) | |
| Mach number dependent parameter (−) | |
| nondimensional vortex time (−) | |
| time constant (−) | |
| vortex lift drag limiting factor (−) | |
| Superscripts | |
| static inviscid (−) | |
| static viscous (−) | |
| impulsive (−) | |
| critical (−) | |
| negative polar data (−) | |
| Subscripts | |
| present sampling time (−) | |
| viscous lagged value (−) | |
| vortex lift affected value (−) |
References
- Bangga, G. Wind Turbine Aerodynamics Modeling Using CFD Approaches; AIP Publishing LLC: New York, NY, USA, 2022. [Google Scholar]
- Martin, J.; Empey, R.; McCroskey, W.; Caradonna, F. An experimental analysis of dynamic stall on an oscillating airfoil. J. Am. Helicopter Soc. 1974, 19, 26–32. [Google Scholar] [CrossRef]
- Carr, L.W.; McAlister, K.W.; McCroskey, W.J. Analysis of the Development of Dynamic Stall Based on Oscillating Airfoil Experiments; Technical Report, NASA TN D-8382; National Aeronautics and Space Administration: Washington, DC, USA, 1977. [Google Scholar]
- McAlister, K.W.; Carr, L.W.; McCroskey, W.J. Dynamic Stall Experiments on the NACA 0012 Airfoil; Technical Report, NASA Technical Paper 1100; National Aeronautics and Space Administration: Washington, DC, USA, 1978. [Google Scholar]
- Ramsay, R.; Hoffman, M.; Gregorek, G. Effects of Grit Roughness and Pitch Oscillations on the S801 Airfoil; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 1996. [Google Scholar]
- Hoffman, M.; Ramsay, R.; Gregorek, G. Effects of Grit Roughness and Pitch Oscillations on the NACA 4415 Airfoil; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 1996. [Google Scholar]
- Ramsay, R.; Hoffman, M.; Gregorek, G. Effects of Grit Roughness and Pitch Oscillations on the S809 Airfoil; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 1995. [Google Scholar]
- Janiszewska, J.; Ramsay, R.; Hoffman, M.; Gregorek, G. Effects of Grit Roughness and Pitch Oscillations on the S814 Airfoil; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 1996. [Google Scholar]
- Bangga, G.; Hutomo, G.; Wiranegara, R.; Sasongko, H. Numerical study on a single bladed vertical axis wind turbine under dynamic stall. J. Mech. Sci. Technol. 2017, 31, 261–267. [Google Scholar] [CrossRef]
- Bangga, G. Numerical studies on dynamic stall characteristics of a wind turbine airfoil. J. Mech. Sci. Technol. 2019, 33, 1257–1262. [Google Scholar] [CrossRef]
- Bangga, G.; Hutani, S.; Heramarwan, H. The Effects of Airfoil Thickness on Dynamic Stall Characteristics of High-Solidity Vertical Axis Wind Turbines. Adv. Theory Simul. 2021, 4, 2000204. [Google Scholar] [CrossRef]
- Bangga, G. Aeroelastic Effects on Wind Turbine. In Wind Turbine Aerodynamics Modeling Using CFD Approaches; AIP Publishing LLC: Melville, NY, USA, 2022; Chapter 6; pp. 6.1–6.20. [Google Scholar]
- Leishman, J.G.; Beddoes, T. A Semi-Empirical model for dynamic stall. J. Am. Helicopter Soc. 1989, 34, 3–17. [Google Scholar]
- Hansen, M.H.; Gaunaa, M.; Madsen, H.A. A Beddoes–Leishman Type Dynamic Stall Model in State-Space and Indicial Formulations; Technical Report, Risø-R-1354; Risø National Laboratory: Roskilde, Denmark, 2004. [Google Scholar]
- Bangga, G.; Lutz, T.; Arnold, M. An improved second-order dynamic stall model for wind turbine airfoils. Wind Energy Sci. 2020, 5, 1037–1058. [Google Scholar] [CrossRef]
- Larsen, J.W.; Nielsen, S.R.; Krenk, S. Dynamic stall model for wind turbine airfoils. J. Fluids Struct. 2007, 23, 959–982. [Google Scholar] [CrossRef]
- Gupta, S.; Leishman, J.G. Dynamic stall modeling of the S809 aerofoil and comparison with experiments. Wind Energy 2006, 9, 521–547. [Google Scholar] [CrossRef]
- Elgammi, M.; Sant, T. A Modified Beddoes–Leishman Model for Unsteady Aerodynamic Blade Load Computations on Wind Turbine Blades. J. Sol. Energy Eng. 2016, 138, 051009. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Q. Modification of Leishman–Beddoes model incorporating with a new trailing-edge vortex model. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1606–1615. [Google Scholar] [CrossRef]
- Sheng, W.; Galbraith, R.M.; Coton, F. A new stall-onset criterion for low speed dynamic-stall. J. Sol. Energy Eng. 2006, 128, 461–471. [Google Scholar] [CrossRef]
- Galbraith, R. Return from Airfoil Stall During Ramp-Down Pitching Motions. J. Aircr. 2007, 44, 1856–1864. [Google Scholar]
- Sheng, W.; Galbraith, R.; Coton, F. A modified dynamic stall model for low Mach numbers. J. Sol. Energy Eng. 2008, 130, 031013. [Google Scholar] [CrossRef]
- Øye, S. Dynamic stall simulated as time lag of separation. In Proceedings of the 4th IEA Symposium on the Aerodynamics of Wind Turbines, Rome, Italy, 20–21 November 1990. [Google Scholar]
- Tran, C.; Petot, D. Semi-empirical model for the dynamic stall of airfoils in view of the application to the calculation of responses of a helicopter blade in forward flight. In Proceedings of the 6th European Rotorcraft Forum, Bristol, UK, 16–19 September 1980. [Google Scholar]
- Tarzanin, F. Prediction of control loads due to blade stall. J. Am. Helicopter Soc. 1972, 17, 33–46. [Google Scholar] [CrossRef]
- Snel, H. Heuristic modeling of dynamic stall characteristic. In Proceedings of the European Wind Energy Conference, Dublin, Ireland, 6–9 October 1997. [Google Scholar]
- Adema, N.; Kloosterman, M.; Schepers, G. Development of a Second Order Dynamic Stall Model. Wind Energy Sci. Discuss. 2019, 2019, 1–18. [Google Scholar] [CrossRef]
- DNV. Bladed Theory Manual 4.14; DNV Services UK Limited: Bristol, UK, 2023. [Google Scholar]
- Beddoes, T. Practical computation of unsteady lift. In Proceedings of the 8th European Rotorcraft Forum; 1982. Available online: http://hdl.handle.net/20.500.11881/1694 (accessed on 26 March 2023).
- Leishman, J. Validation of approximate indicial aerodynamic functions for two-dimensional subsonic flow. J. Aircr. 1988, 25, 914–922. [Google Scholar] [CrossRef]
- Garbaruk, A.; Shur, M.; Strelets, M.; Travin, A. NACA0021 at 60 deg. incidence. Notes Numer. Fluid Mech. Multidiscip. Des. 2009, 103, 127–139. [Google Scholar]
- Bangga, G. Comparison of blade element method and CFD simulations of a 10 MW wind turbine. Fluids 2018, 3, 73. [Google Scholar] [CrossRef]
- Bangga, G.; Lutz, T. Aerodynamic modeling of wind turbine loads exposed to turbulent inflow and validation with experimental data. Energy 2021, 223, 120076. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Indicial IAG | 0.3 | 0.7 | 0.7 | 0.53 | 0.75 | 1.7 | 3.0 | 6.0 | 6.0 | 0.2 | 0.1 | 1.5 | 1.5 | 0.76 |
| State-Space IAG | 0.3 | 0.7 | 0.7 | 0.53 | 0.75 | 1.7 | 3.0 | 6.0 | 6.0 | 0.2 | N/A | N/A | N/A | N/A |
| Model | S801 | S809 | S814 |
|---|---|---|---|
| Indicial IAG | 15.1 | 14.1 | 10 |
| State-Space IAG | Automatic | Automatic | Automatic |
| Parameter/Model | BL Model | Øye Model | IAG Model |
|---|---|---|---|
| S801 Airfoil | |||
| 0.333 | 0.335 | 0.179 | |
| 0.174 | 0.117 | 0.080 | |
| 0.084 | 0.064 | 0.049 | |
| S809 Airfoil | |||
| 0.257 | 0.249 | 0.127 | |
| 0.133 | 0.084 | 0.057 | |
| 0.068 | 0.050 | 0.038 | |
| S814 Airfoil | |||
| 0.306 | 0.300 | 0.127 | |
| 0.145 | 0.081 | 0.036 | |
| 0.079 | 0.056 | 0.030 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bangga, G.; Parkinson, S.; Collier, W. Development and Validation of the IAG Dynamic Stall Model in State-Space Representation for Wind Turbine Airfoils. Energies 2023, 16, 3994. https://doi.org/10.3390/en16103994
Bangga G, Parkinson S, Collier W. Development and Validation of the IAG Dynamic Stall Model in State-Space Representation for Wind Turbine Airfoils. Energies. 2023; 16(10):3994. https://doi.org/10.3390/en16103994
Chicago/Turabian StyleBangga, Galih, Steven Parkinson, and William Collier. 2023. "Development and Validation of the IAG Dynamic Stall Model in State-Space Representation for Wind Turbine Airfoils" Energies 16, no. 10: 3994. https://doi.org/10.3390/en16103994
APA StyleBangga, G., Parkinson, S., & Collier, W. (2023). Development and Validation of the IAG Dynamic Stall Model in State-Space Representation for Wind Turbine Airfoils. Energies, 16(10), 3994. https://doi.org/10.3390/en16103994