1. Introduction
Moving object localization and tracking (L&T) is one of the most important research aspects for the success of various location-based-services (LBS) [
1,
2,
3]. LBS can largely uplift the quality of life of those around us through numerous applications. For example, a rider can rent a bike with the help of a mobile app in a bike-sharing service and once their use is over they may leave it anywhere for the next user. In this application, the exact positions of all bikes in the service are utilized by interested customers to check for the nearest available bike. Nowadays, a smart-watch can very easily provide services such as person tracking, activity monitoring, and emergency messages. It has also been witnessed in the retail sector, insofar as the knowledge of exact positions can be utilized to raise business profits by identifying customer positions and guiding them towards specific products according to their interests in the mall. The people’s locations at airports, metros, and rail stations can be used to study passenger statistics to provide the required signaling to them. Although GPS can provide locations, their indoor localization accuracy is limited because of the unavailability of satellite signals. Due to the capability of ubiquitous computing and smart sensing, the wireless sensor network (WSN) can replace GPS for indoor scenarios. In spite of other popular wireless technological options, the WSN is widely preferred for indoor L&T due to the low cost and low power consumption involved. The WSN is basically a network of number of sensor nodes that can cooperatively sense and transmit the parameters of interest from the surrounding RF environment to a base station at which the processing of the sensed data is possible [
4].
Although a widely used metric for target L&T, RSSI field measurements are often very noisy and highly fluctuating in nature as indoor RF environments are generally very complex [
5,
6]. These measurements generally suffer from indoor interference, multi-path fading, noise, and varying obstacles That is why RSS-based target L&T systems often suffer from high localization errors. Due to its simplicity in implementation, trilateration is very popular for target L&T [
7,
8]. Although trilateration-based localization has simplicity in its implementation, it produces poor localization accuracy due to error uncertainty in RSSI measurements or the dynamic indoor environment. The localization accuracy generally suffers due to the fluctuating nature of RSS measurements. In more dynamic indoor environments involving reflection, interference, and obstacles, the machine learning (ML)-based RF fingerprinting techniques can be more useful than trilateration in the context of localization accuracy [
9,
10]. Considering the adaptive nature of ML techniques, they can easily eliminate the need for unnecessary system redesign. For instance, Support vector machine (SVM) has global optimality, very high data fitting accuracy, and fewer hyper parameters [
11,
12,
13]. Due to high result generalization ability, SVM has also gained wide range preference in regression problems (wherein it is called as Support Vector Regression (SVR)). Compared with many popular ML models, SVR shows better forecasts in indoor target localization [
10]. The SVM has four popular kernel functions, namely, linear, sigmoid, RBF, and polynomial. Thus, the proposed SVR-based system must be tested with these four kernel functions. One more important aspect in need of due consideration in the target-localization problem is the total energy consumed during the target-localization process [
14]. Energy consumption during RF communication between two WSN nodes basically has two important components, namely, the energy consumed during RF propagation through the radio channel and the energy consumed in the WSN node hardware. This energy consumption is always directly proportional to length of the transmitted packet. While formulating the solution for the indoor target-localization problem, multiple RSSI measurements are generally taken into account to minimize the error in location estimation to compensate for the effect of the dynamicity in the RSSI measurement noise. However, due to the involvement of multiple RSSI measurements, the total energy consumption also increases. Thus, the proposed indoor localization approach must also be a low-energy-consumption solution. In this paper, we evaluated the impact of linear, sigmoid, RBF, and polynomial kernel functions on the target-localization accuracy as well as noted the energy consumption involved during localization in case I to case IV, respectively. The key outcomes of the research are as follows:
An SVR-based L&T model fed with RSSI measurements was proposed to solve the problem of dynamicity in RSSI measurements as well as indoor environments, and it was compared with a well-known trilateration-based L&T scheme for the same RSSI measurements through rigorous localization accuracy simulations. Here, the trilateration and the proposed SVR-based scheme were fed with six and three RSSI measurements, respectively. The energy consumption during the target L&T for these two approaches were also compared.
Further, the target location estimations obtained using the proposed SVR scheme were run through a standard Kalman Filter (KF) for further refinement, and named as SVR+KF. The proposed SVR+KF framework was evaluated against trilateration and plain SVR-based schemes. Out of these three schemes, the SVR+KF-based scheme provided the lowest error in estimating the target location.
We also tested the impact of the kernel function on target-tracking accuracy with the proposed SVR+KF algorithm. In this work, we tested four popular SVM kernel functions, namely, linear, sigmoid, RBF, and polynomial, during simulations in case I to case IV, respectively. In the target motion in all of these cases, the target was assumed to have high variation in the target velocity during its motion, and high maneuverability in trajectory. The noise in the RSSI measurements was kept the same for all four cases. The simulation results showed that the fusion of SVR and KF (i.e., the SVR+KF localization scheme) was highly accurate, consistent, and reliable in estimating target locations with the four considered types of kernels.
The rest of this paper is organized as follows:
Section 2 covers the recent RSSI-based target-localization models, followed by a discussion on the proposed SVR-based target-localization model in
Section 3. The system assumptions and design and the obtained results with the proposed L&T scheme are given in
Section 4 and
Section 5, respectively. The research findings are then summarized in
Section 6.
2. Related Work
The indoor target L&T schemes fed with RSSI measurements can be broadly categorized into two categories: ML-based methods and filter-based methods. The ML-based methods generally utilize supervised learning principles through RF fingerprinting. The popular ML-based L&T solutions in the literature are radial basis function (RBF), k-Nearest Neighbor (KNN), extreme learning machine (ELM), multilayer perceptron (MLP), recurrent Neural Network (RNN), Convolutional Neural Network (CNN), back propagation neural network (BPNN), and support vector machine (SVM). Once these models were trained offline with a dataset containing RSSI values and target locations, they were tested with random RSSI measurements in the online location estimation step. The error in the RSSI measurements is generally certain for almost any kind of indoor environment. The important reason behind this is the presence of household appliances, presence of electrical systems, and different kinds of obstacles between the transmitter and receiver nodes. Therefore, maintaining the line-of-sight (LOS) condition along the signal path between transmitter and receiver is impossible because of signal reflection, fading, and multi-path propagation. That means the mitigation of errors in the RSSI measurements is impossible. However, by adopting advanced ML-based signal-processing techniques, the target location estimation result can be improved. The ranging error can be mitigated with the help of a fuzzy-based obstacle identification and mitigation technique in the IR-UWB-based system [
15,
16]. The CNN-based target-localization scheme with RSSI measurements as inputs was proposed in ref. [
17]. Here, the authors were successful in shifting the complexity of the online estimation stage to an offline training stage. The proposed scheme yielded 2 m localization accuracy. Here, thousands of RSSI fingerprints with entries for a 12.5 m × 10 m area were utilized for localization using the deployed APs. The average localization errors obtained with the proposed fingerprint-based approach were 4.1145 m, 4.1681 m, and 3.9118 m by utilizing SVM, KNN, and CNN-based schemes, respectively. The major drawback with the CNN-enabled target L&T schemes is the requirement of fine-tuning the hyper-parameters of CNN, namely, the activation function, threshold, and learning rate, and this is a very time-consuming task. This makes CNN accurate for specific indoor conditions, but less accurate for other indoor setups. In ref. [
18], the authors proposed a kernel ELM (K-ELM)-based target L&T using 68,500 RSSI measurements obtained from an indoor area of 32 m × 16 m with eight sensor nodes. The proposed K-ELM-based scheme was compared with KNN, Bayesian, ELM, and online sequential ELM (OS-ELM) schemes, and it was found that the proposed scheme yielded 8.125 m accuracy, which is quite high against the rest of the other considered techniques for same indoor setup. The authors also used BPNN for target L&T, but it involved the need of a large number of iterations for converging to the optimum solution [
19].
In ref. [
20], the authors proposed a SVM-based L&T scheme, which is based on the assumption of advance knowledge of the node connectivity in the network and anchor node positions. They built an SVM classification model which utilizes RSSI field measurements collected by anchor nodes to be utilized for location estimation. This scheme was found to be reliable only for WSN with densely distributed nodes. In ref. [
21], the authors computed the upper bound of the localization error for SVM-based L&T, using which the localization accuracy was improved using mass-spring-based optimization. In ref. [
11], the authors presented a multi-class classifier based on SVM for L&T. It utilizes RSSI measurements obtained from a real-time environment of a hospital, and a laboratory building for training the proposed SVM classifier. In ref. [
22], authors proposed a target L&T model using features of the channel state and RSSI. Herein, principal component analysis (PCA) was initially used for dimension reduction, and then SVM was used to obtain the target locations to obtain an accuracy in the range of 1 m. In our previous work [
12], two range-free RSSI-based localization schemes, namely, SVR and SVR+KF were used. In this work, a linear kernel function with the proposed support vector regression (SVR) architecture was used to solve indoor target L&T. Unlike the work in ref. [
12], in the proposed research work, the impacts of all the four popular kernel functions were tested with the SVR architecture, and we also attempted to find the energy consumption during the target L&T. The authors in ref. [
13] proposed a least-squares-based SVR (LSSVR) to deal with dynamicity in RSSI measurements for a target L&T. The idea used here is to remove older values once new RSSI values are available in the queue. The proposed LSSVR scheme yielded an improvement of 21.82% without parameter optimization and of 11.70% with parameter optimization in localization accuracy.
In the filter-based target L&T, state-estimation techniques, such as KF and Particle Filter (PF), are major schemes, which involve two steps: prediction and measurement. The work in refs. [
23,
24] presented online semi-supervised SVR (OSS-SVR)-based localization to reduce the required amount of labeled data in the training set. Further, the proposed OSS-SVR results were fused with KF. It was found that the proposed OSS-SVR scheme was robust enough to in terms of the fluctuating system noise and needed a significantly smaller amount of labeled data during training. In our previous work [
25], trilateration-based estimates were applied as inputs to KF for the tracking of mobile targets in WSN to present two range-based algorithms: RSSI+KF and RSSI+UKF. In this work, the proposed combination were evaluated for uncertainties in terms of RSSI noise, impact of variation in anchor density, and abrupt variation in target velocity. The results obtained through simulation experiments confirmed the efficacy of both presented algorithms in spite of RF environmental dynamicity. However, due to the need of frequently computing distances between transmitters and receivers, although the proposed algorithms showed localization errors below 1 m, it has large computational complexity as compared with other range-free localization solutions. The GRNN estimates were fed to KF to present range-free schemes for the target L&T in WSN [
26,
27,
28]. The proposed algorithms GRNN+KF and GRNN+UKF successfully deal with RSSI noise uncertainty. Here, the proposed GRNN model was trained with only four RSSI measurements and the corresponding target locations obtained for any random time duration for the given indoor environment. Then, the GRNN-based location estimates obtained were supplied to KF and UKF to refine these further.
3. SVR for the Target L&T
SVM is a ML model which is based on supervised learning with several unique features as compared with other ML models. It can be used for classification (SVC) as well as regression [
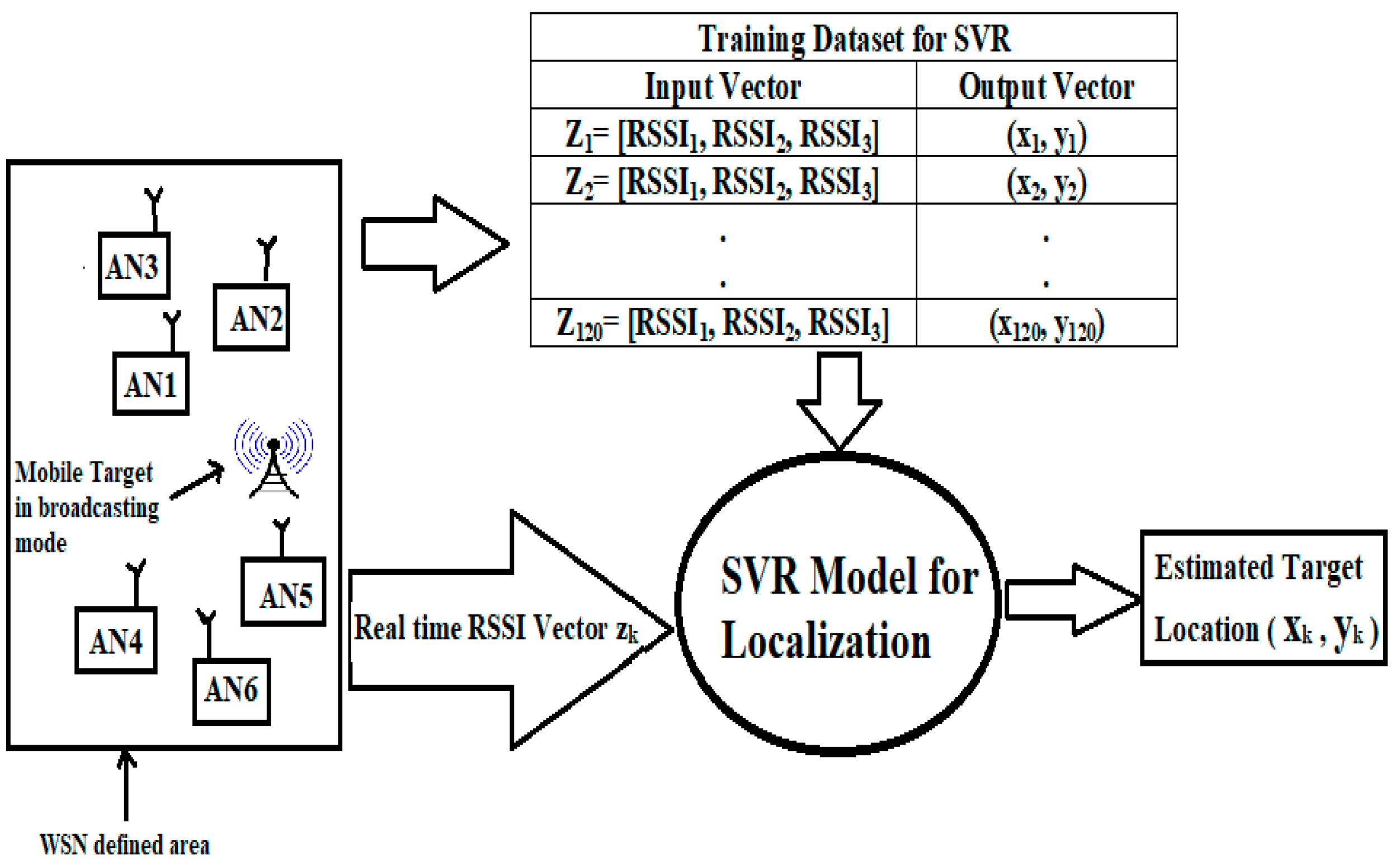
12]. The SVR has the capability to capture highly nonlinear relationships in the input-feature space and its computational complexity is not dependent on the dimensionality of the input space. It is capable of highly accurate prediction along with having a decent generalization ability. Due to all these advantages, it may be used for target L&T. Here, the proposed SVR model was trained using 120 sets of RSSI field measurements and the corresponding target locations in the offline stage (See
Figure 1). Once trained, any input vector of real-time RSSI measurements can be then applied to it to obtain the corresponding target-location estimate (online target-location estimation stage). In the background, the SVR architecture searches for similar RSSI input vectors from the training set to look for the closest possible match for the RSSI vector from the training set, and, based on that, it discerns the corresponding target-location estimate.
The simulated RSSI measurements considered in this work are based on a logarithmic shadowing model with the following mathematical equation [
26,
27]:
where,
—RSSI received at the node with coordinates at time ,
—Path loss exponent,
—RSSI measurement at the distance of ,
—Normal random variable representing the noise in RSSI.
The SVR model can be formulated by Equation (2) [
21]:
where,
, and
are the SVR coefficients, and
is any given RSSI input vector. The optimized model corresponding to Equation (2) is given below [
12]:
where,
—Regularization factor. Its default value () is used here,
—Insensitive loss error function,
, —Upper and lower Slack variables of SVR.
The default values of
and
were used in this work, and were 0.01 and 0.001, respectively. To minimize Equation (2) into Equation (3), the regression function used is given below by Equation (4) [
12]:
where,
—bias value,
—Kernel function,
—Lagrange multipliers.
Different kernel functions can be utilized to solve the target L&T problem with SVR [
10,
20]. In this work, we tested the SVR architecture for target-localization and tracking using four popular kernel functions, as given below.
where 𝛾 and 𝛽 are constants. Here, as in ref. [
21], we used 𝛾 = 1/17, 𝛽 = 0. β is the slope parameter, which varies from 0 to ∞, yielding a straight line and step function, respectively. Thus, by varying the value of β, the slope of the sigmoid functions can be varied. As this research work aimed to estimate target location (regression problem), β was set to 0.
where 𝑑 is the degree of the polynomial and 𝛾 and 𝑐 are the polynomial kernel constants. Here, as in Ref. [
21], we used 𝛾 = 1/17, 𝑐 = 0, and 𝑑 = 3
4. System Design and Assumptions of the Proposed SVR-Based L&T System
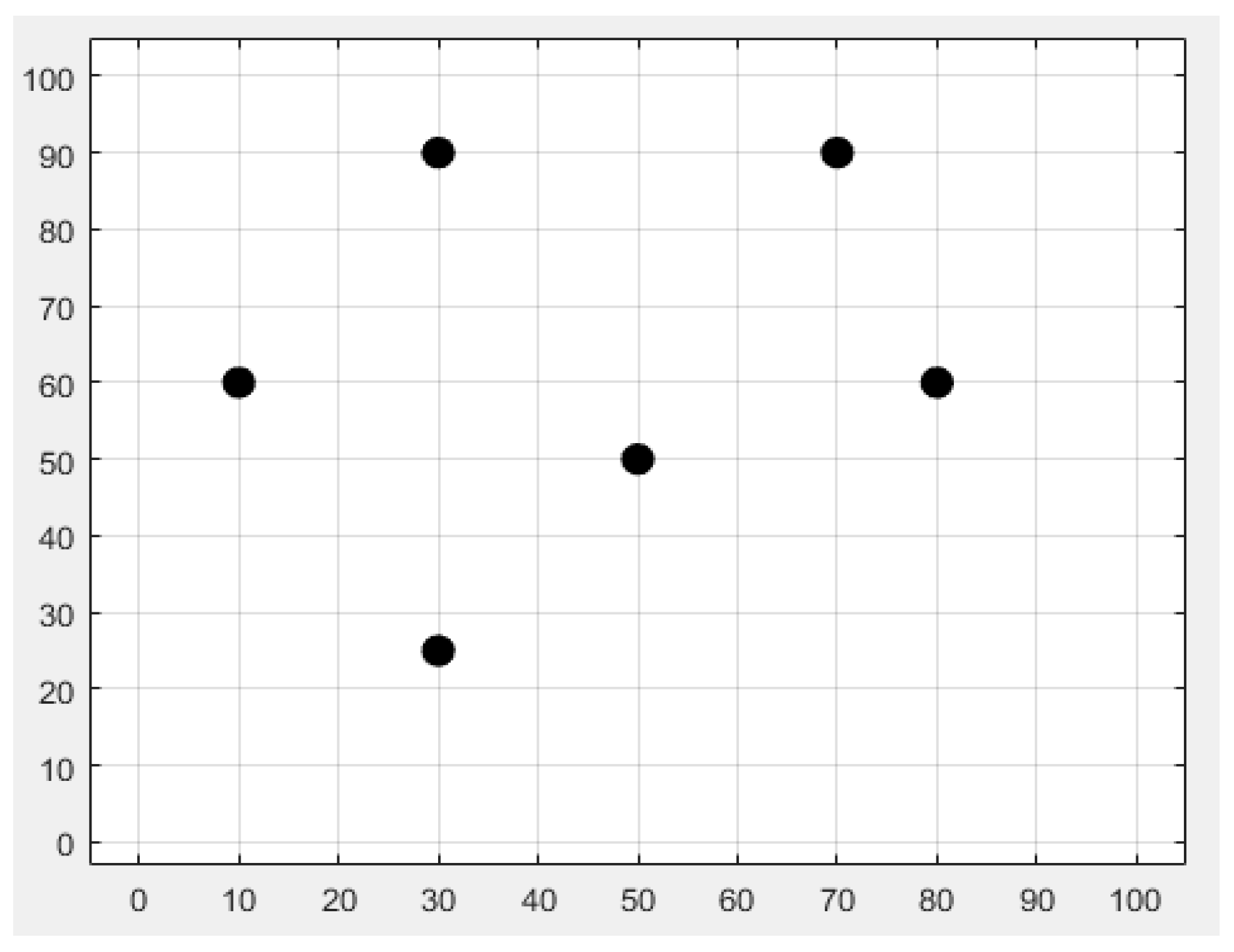
In the presented work, an WSN area of 100 m × 100 m is considered with the motion of one target and six stationary anchor nodes (AN’s) as shown in
Figure 2 and
Table 1. Out of all the six deployed AN’s, any three AN’s are required to locate a moving target using the proposed SVR and SVR+KF location estimation models. Here, RSSI measurements from AN1 to AN3 were given to the proposed schemes as inputs, whereas the measurements from all AN’s were given to the trilateration-based localization scheme. The RSSI measurements obtained from the six AN’s were denoted as RSSI
1 to RSSI
6. The key simulation parameters for this study are given in
Table 2.
The input vector (
) for the proposed SVR-based schemes at a specific time instance k for each target location during its motion can be formulated as follows:
Let us consider
and
as the target locations,
and
as the velocities in
and
directions, respectively, at time
. They are given as follows:
where
and is taken as 1 s here.
The target velocities during its motion for 40 locations are defined below using Equation (12) to Equation (15) (See
Figure 3).
The performance evaluation parameters used in this work were root mean square error (RMSE) and average localization error as given below in Equation (16) to Equation (19). All the three RMSE’s and localization error ideally must be as low as possible.
where,
— location estimate for time instance,
—real target position at time instance.
A sensor node has three important energy-consuming units, namely, a sensor node, processing unit, and RF transceiver [
14]. The energy consumption with sensor-based target localization is basically due to the energy consumption from the processing unit (
) and RF transceiver (
). This energy consumption can be expressed as follows [
14]:
Assuming the total
N RSSI measurements with bit duration
tRSSI and N ACKs with bit duration
tACK, the energy consumption for the estimation of the distance for one anchor node is given as follows [
14]:
where,
—energy needed for waking up a transceiver,
—energy needed for waking up a microcontroller,
—transmitter power,
—receiver power,
—power of the sensor node microcontroller in the active state,
—Total number of RSSI measurements considered. Here as there are six anchor nodes, so it is 6 for trilateration case, and 3 for SVR case.
An unknown node (here node associated with moving target) expends energy (Eunkn) given by
For the total energy consumption in RSSI-based localization using multilateration for locating an unknown node (target node here) using six AN’s, the total energy consumption is expressed as follows:
where
—energy consumed by the microcontroller in a target node for executing multilateration or the proposed SVR algorithm. From Equations (21)–(23), energy consumption depends on the number of RSSI measurements (
), and is linearly proportional with
.
In this research work, we assumed a 40B length RSSI frame and 11B ACK frame. The energy consumed for a target L&T with trilateration and the proposed SVR models can be calculated using Equations (21) and (22). The typical values of an 802.15.4 compliant RF transceiver were adopted for this analysis, as shown in
Table 3. The energy consumed by the microcontroller (associated with a target node) calculating its location was computed from the time duration of the proposed SVR algorithm for processing RSSI measurements from six AN’s.
5. Results and Discussion
It is quite logical that the location estimates obtained with any SVR-based model with different kernel functions will have varying performance. Thus, it would be quite interesting to check the impact of different kernel functions on indoor target localization with the proposed SVR-based framework. In this work, we used four kernel functions with the proposed SVR scheme, namely, linear, RBF, polynomial, and sigmoid. These kernel functions were tested separately for the same system setup in case I to case IV. Case I to case IV evaluated the impact of linear, polynomial, RBF, and sigmoid kernel functions on the target localization with the proposed SVR-based model, respectively. The results of case I are provided in
Figure 4 and
Table 4. In order to differentiate the real target trajectory and location estimations obtained using trilateration, SVR, and SVR+KF, we used “red square”, “blue circle”, “black plus”, and “red plus” markers, respectively, in
Figure 4 (case I). The same color markers were used in the rest of the cases considered in this work. To assess the localization accuracy of trilateration and the proposed SVR-based schemes, the RMSE values for x-coordinate estimation and y-coordinate estimation along with average RMSE values and average localization errors were computed for each of the four cases using Equation (16) to Equation (19), respectively.
Figure 4a shows the actual target trajectory in the given indoor environment and the estimated trajectories with all the considered localization techniques.
As discussed in
Section 4, the target was assumed to take 40 locations in the given indoor environment during its motion.
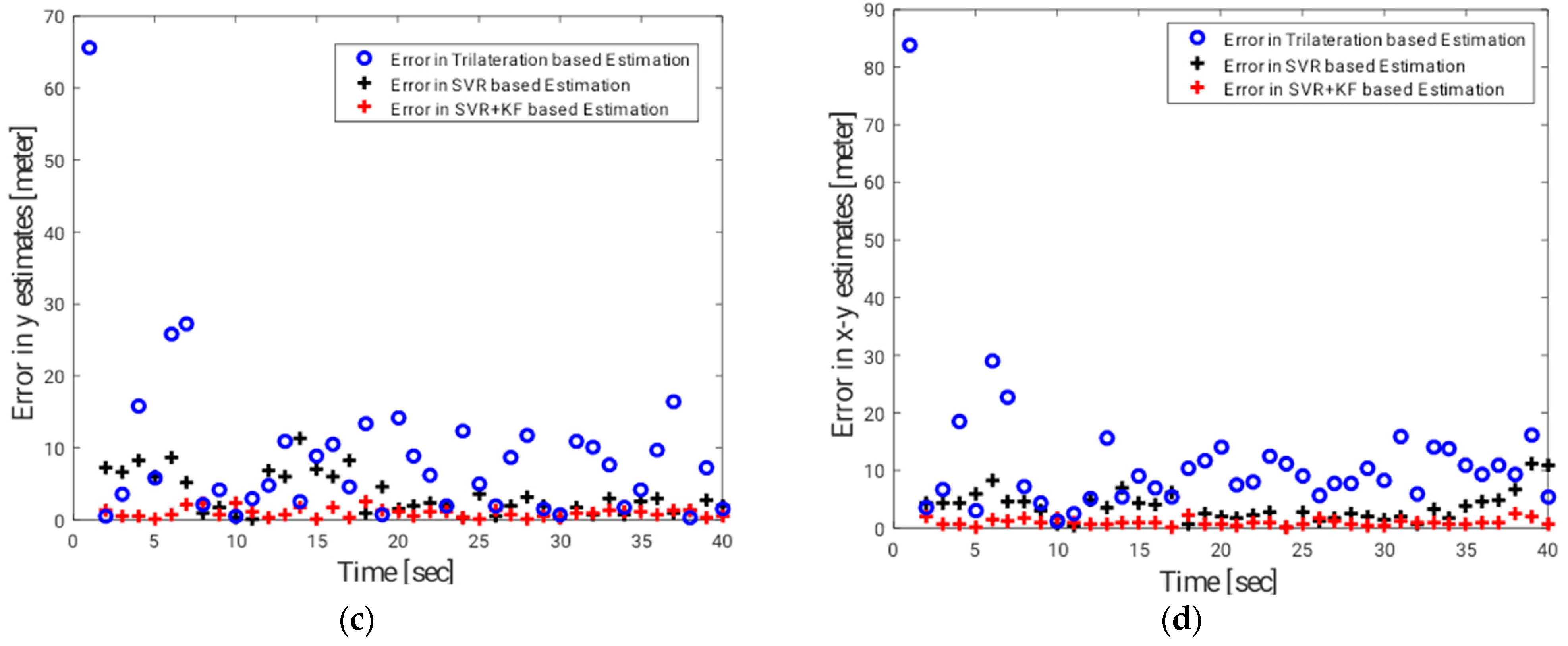
Figure 4b,c illustrate the localization (location estimation) error for each of these 40 target locations with trilateration, SVR, and SVR+KF for the x-coordinate and y-coordinate for each target, respectively. To obtain the overall 2-D localization performance with trilateration for the proposed SVR-based models, the location estimation errors for the x and y coordinates were averaged to obtain the average localization error. The values of the average localization errors for 40 target positions are shown in
Figure 4d. From
Figure 4a, it can be seen that the estimations achieved with the trilateration scheme were far away from the corresponding real target positions compared with those of the proposed SVR models. Few location estimates obtained with plain SVR models without KF are close to the corresponding real target positions; however, the remaining estimates are away from the actual target location by 2 to 5 m. Most of the estimates given by the proposed SVR+KF model coincided with the corresponding real target positions. The individual location estimation error for the x-coordinate and y-coordinate corresponding to the actual target locations can be observed in
Figure 4c and
Figure 4d, respectively. The RMSE values and average position estimation errors were highest, moderate and lowest with trilateration, and the proposed SVR-based schemes, respectively, in the case of linear kernel (case I) (See
Table 4). The average RMSE with the SVR-based schemes for the linear kernel function case decreased by 68% and 99%, respectively, against the trilateration-based localization scheme. The average position estimation error with SVR and SVR+KF for the linear kernel function case decreased by approximately 66% and 91%, respectively, as compared with that of the trilateration-based localization scheme. Thus, both SVR-based schemes outperformed the traditional trilateration-based scheme using RSSI measurements.
The case II results with the application sigmoid kernel-based SVR schemes are given in
Figure 5 and
Table 5. Unlike the case I results, the case II results demonstrated that the target L&T performance with trilateration was superior to the proposed plain SVR-based localization scheme. However, the target-localization performance of the proposed SVR+KF outperformed trilateration by a large margin. The average RMSE with SVR+KF for the sigmoid kernel function decreased by around 98% as compared with that of the trilateration-based localization scheme. The average location estimation error with SVR+KF for the linear kernel function case decreased by around 89% as compared with that of the trilateration-based localization scheme. Although the L&T performance with the proposed SVR+KF outperformed the other considered schemes, the average location estimation error and average RMSE with SVR+KF in case II increased by 48% and 19%, respectively, as compared with that of with SVR+KF in case I. The case III results with the application of the RBF kernel-based SVR schemes are shown in
Figure 6 and
Table 6. As with the case II results, case III results also showed that the target-localization performance with trilateration was superior to that of the proposed plain SVR-based localization scheme. As in case I and case II, the L&T performance with the proposed SVR+KF outperformed the other considered schemes. However, the average localization error and average RMSE with the SVR+KF-based scheme were high in case III against that of SVR+KF in case I and case II. Thus, at this point, it is clear that the use of the RBF kernel function with the proposed SVR-based schemes is not a good option.
The case IV results with the application of polynomial kernel-based SVR schemes are shown in
Figure 7 and
Table 7. As in case I results, from case IV results it is observed that the target-localization performance with SVR-based schemes was superior to that with trilateration. The RMSE values and average localization errors were highest, moderate and lowest with trilateration, and the proposed SVR-based schemes, respectively, with the polynomial kernel function. The average RMSE with SVR and the SVR+KF for polynomial kernel function case decreased by approximately 36% and 99%, respectively, as compared with that of the trilateration-based localization scheme. The average error in location estimation with SVR and SVR+KF for the polynomial kernel function case decreased by approximately 34% and 91%, respectively, as compared with that of the trilateration-based localization scheme. Thus, both SVR-based schemes outperformed the traditional trilateration-based target-localization approach using RSSI measurements. Comparing the localization performance of the proposed SVR+KF scheme in case I and case IV, it is clearly observed that the target-localization accuracy with the polynomial kernel function-enabled SVR scheme was very high as compared with that of the linear kernel function-enabled SVR scheme. The average location estimation error and average RMSE with SVR+KF in case IV decreased by approximately 5% and 39%, respectively, against that with SVR+KF in case I.
Thus, after discussing the target-localization results in case I to case IV, it is confirmed that the selection of kernel function in the SVR-based target-localization model had a significant impact on target tracking accuracy. In this research work, a number of important research findings can be noted. Regarding the proposed SVR+KF scheme, the highest localization accuracy could be seen with the polynomial kernel function (case IV) as compared with that of the rest of the other kernel functions considered in this study. Whereas, regarding the proposed plain SVR scheme, the highest localization accuracy could be seen with the linear kernel function (case I) as compared with that of the rest of the other considered kernel functions. The time complexity of trilateration, SVR, and SVR+KF models were found to be 4 milliseconds, 2.9 milliseconds, and 4.2 milliseconds, respectively, by using the tic-toc command of MATLAB. Thus, proposed model does not add more complexity as compared to trilateration. As discussed earlier, in moderate and high localization accuracy-demanding applications, the proposed SVR-based target L&T models can be selected. The proposed SVR-based schemes utilize RSS measurements, which are very fluctuating in nature. Therefore, for each trial in case I to case IV, different localization results were obtained. Thus, in order to avoid misleading conclusions, the results provided in this research article are based on an average of 50 trials of each case. We believe that for different indoor environmental setups, the localization results can be different. However, the research findings in this paper with the proposed SVR-based L&T schemes can be a very good guide to build specific SVR-based models to solve the problem of target localization and tracking for any given indoor setup.






 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}