
Thermal Analysis of Power Converters for DFIG-Based Wind Energy Conversion Systems during Voltage Sags


Abstract
:1. Introduction
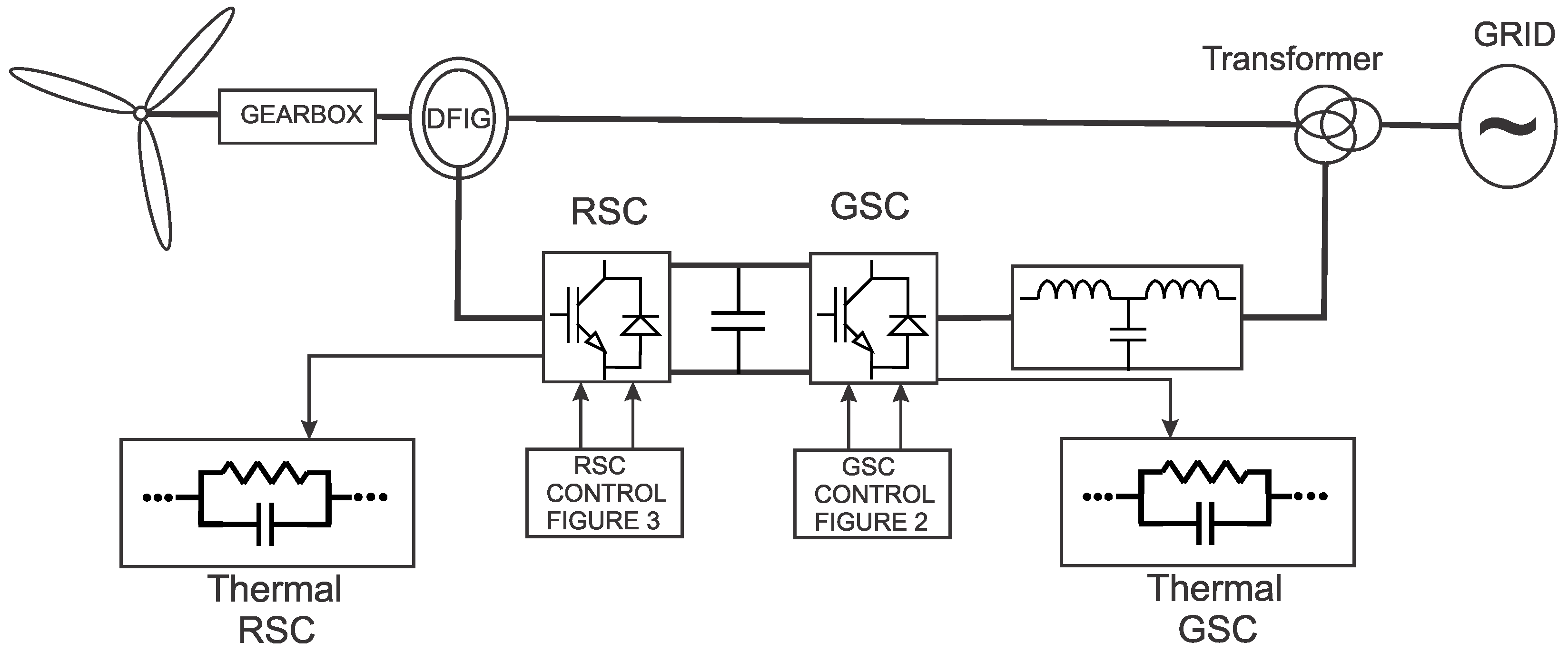
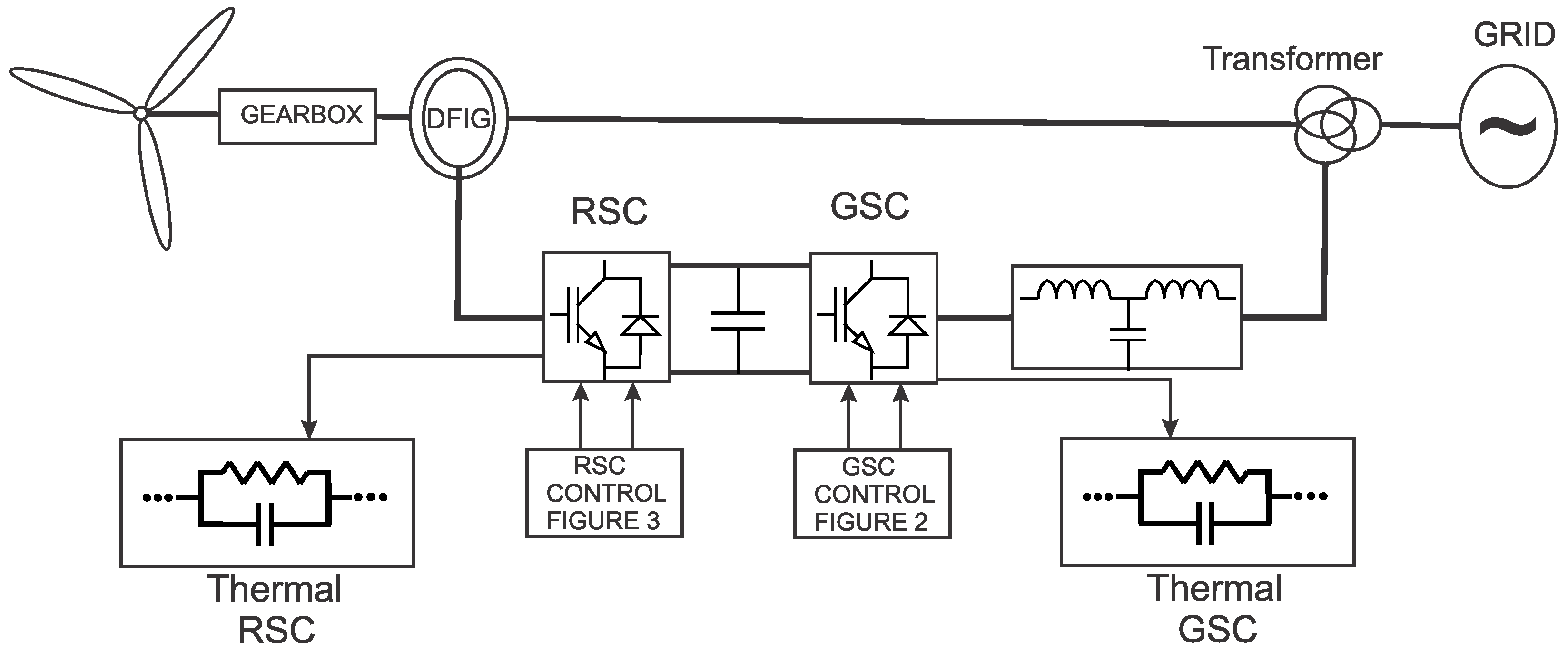
2. Overview of DFIG-Based WECSs
2.1. DFIG
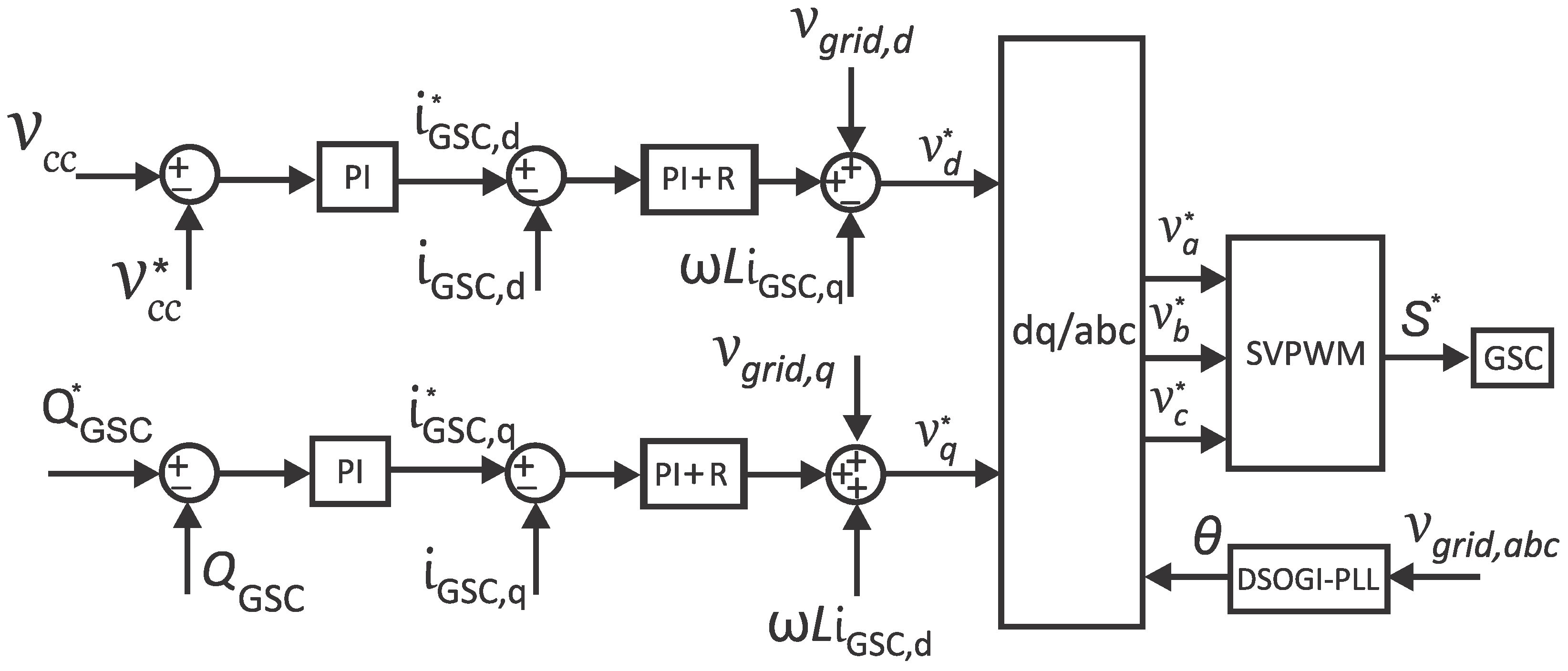
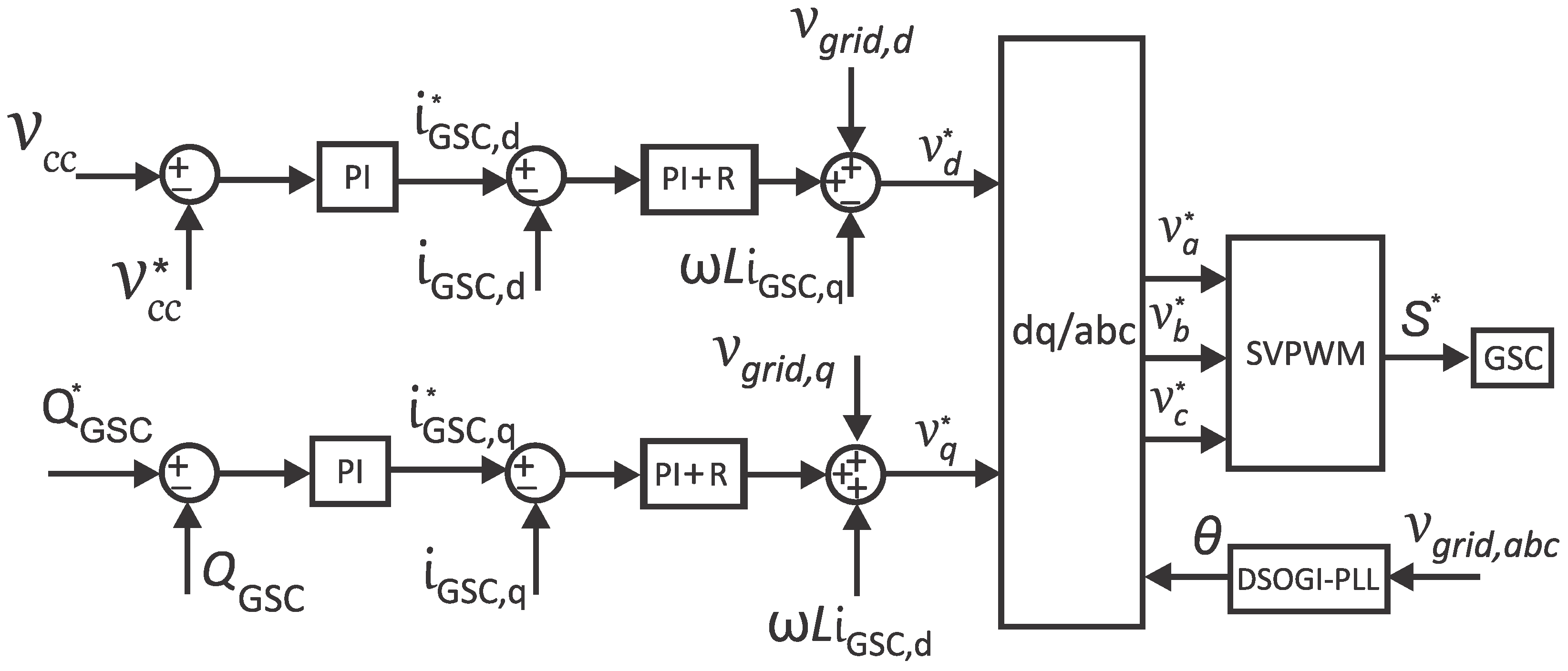
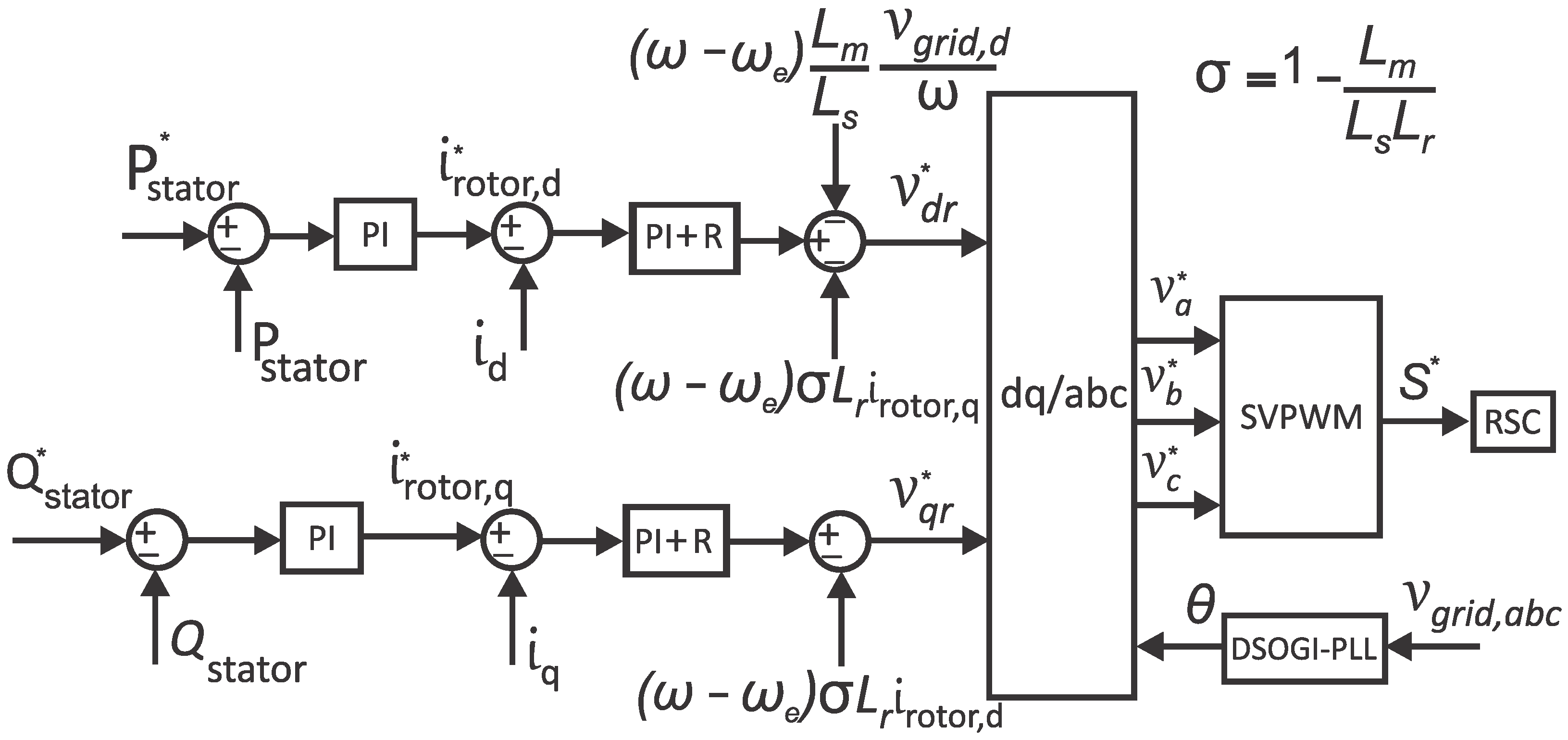
2.2. AC/DC/AC Converter
3. Assessment of DFIGs during Voltage Sags
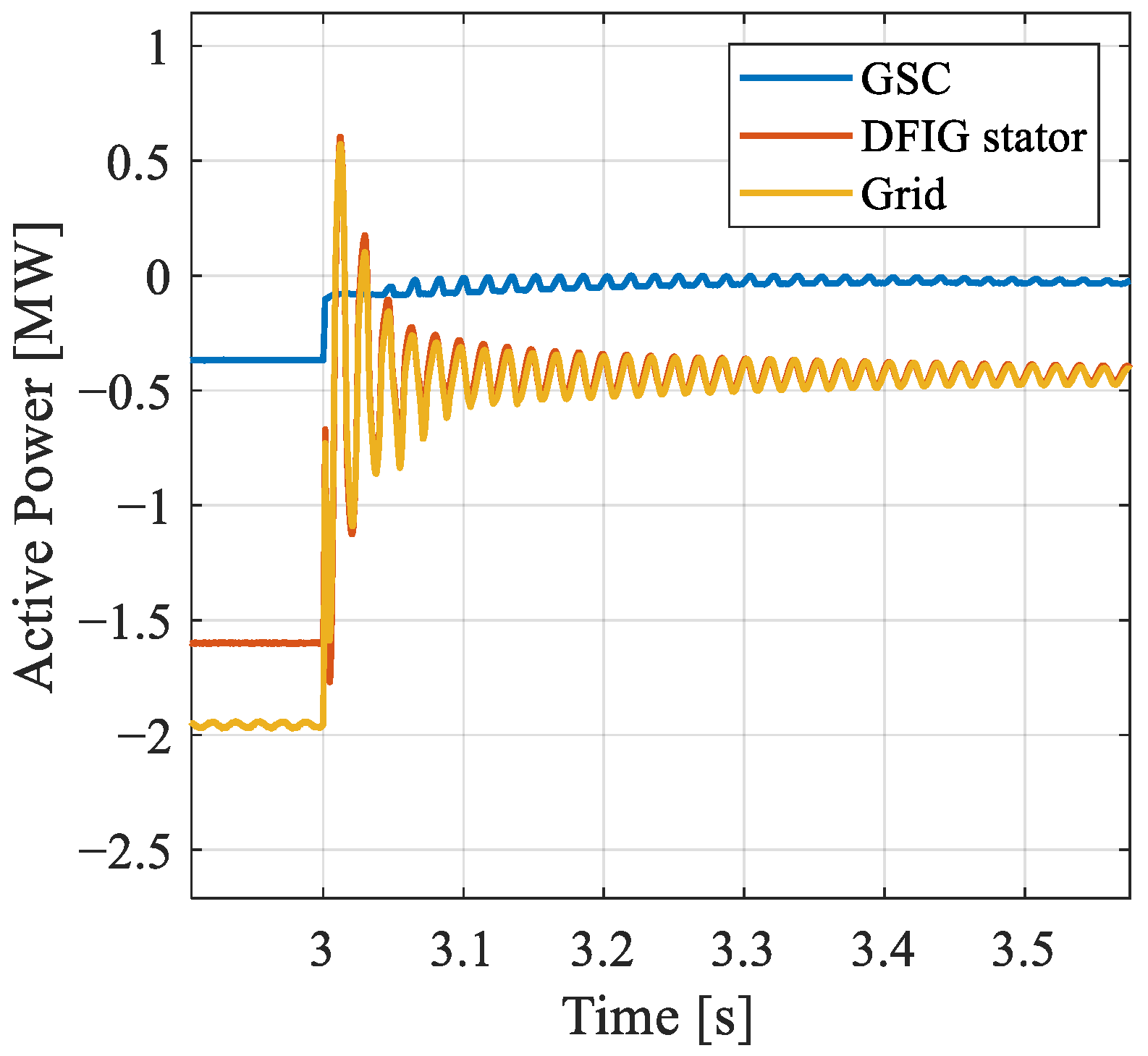
3.1. Balanced Voltage Sags
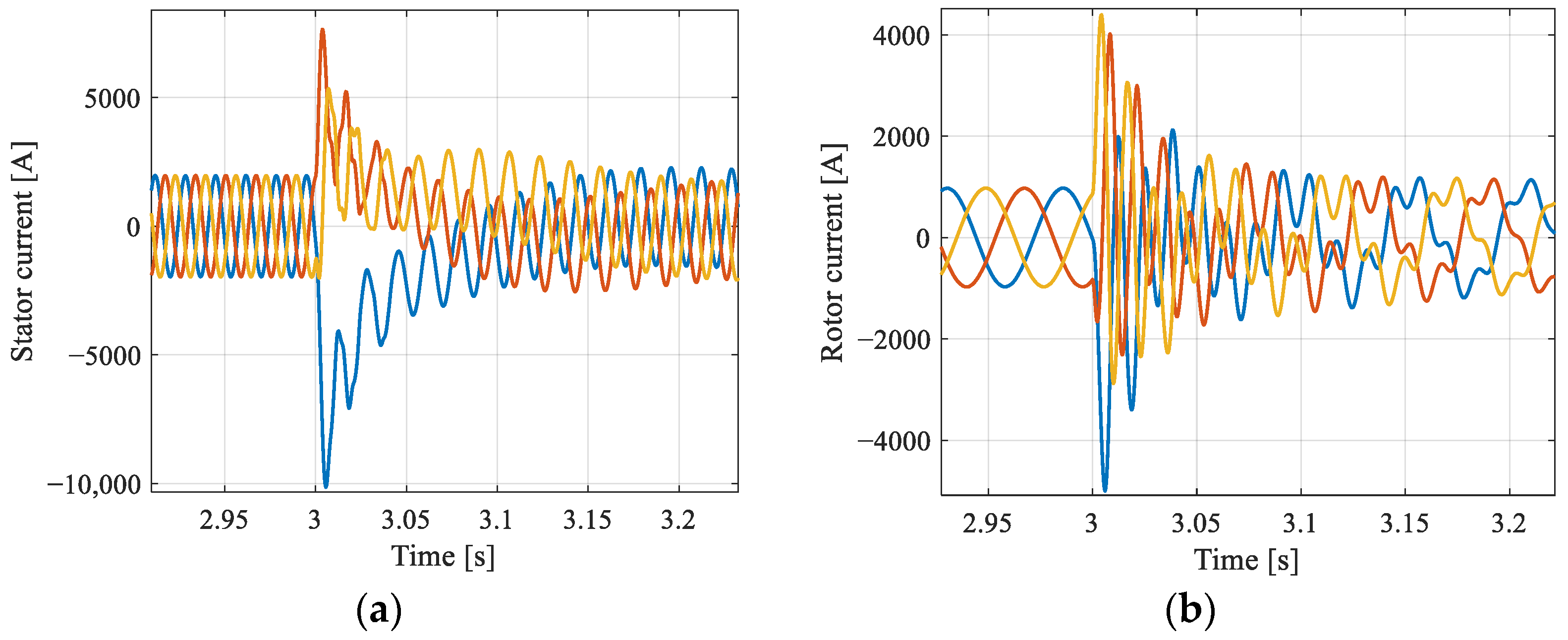
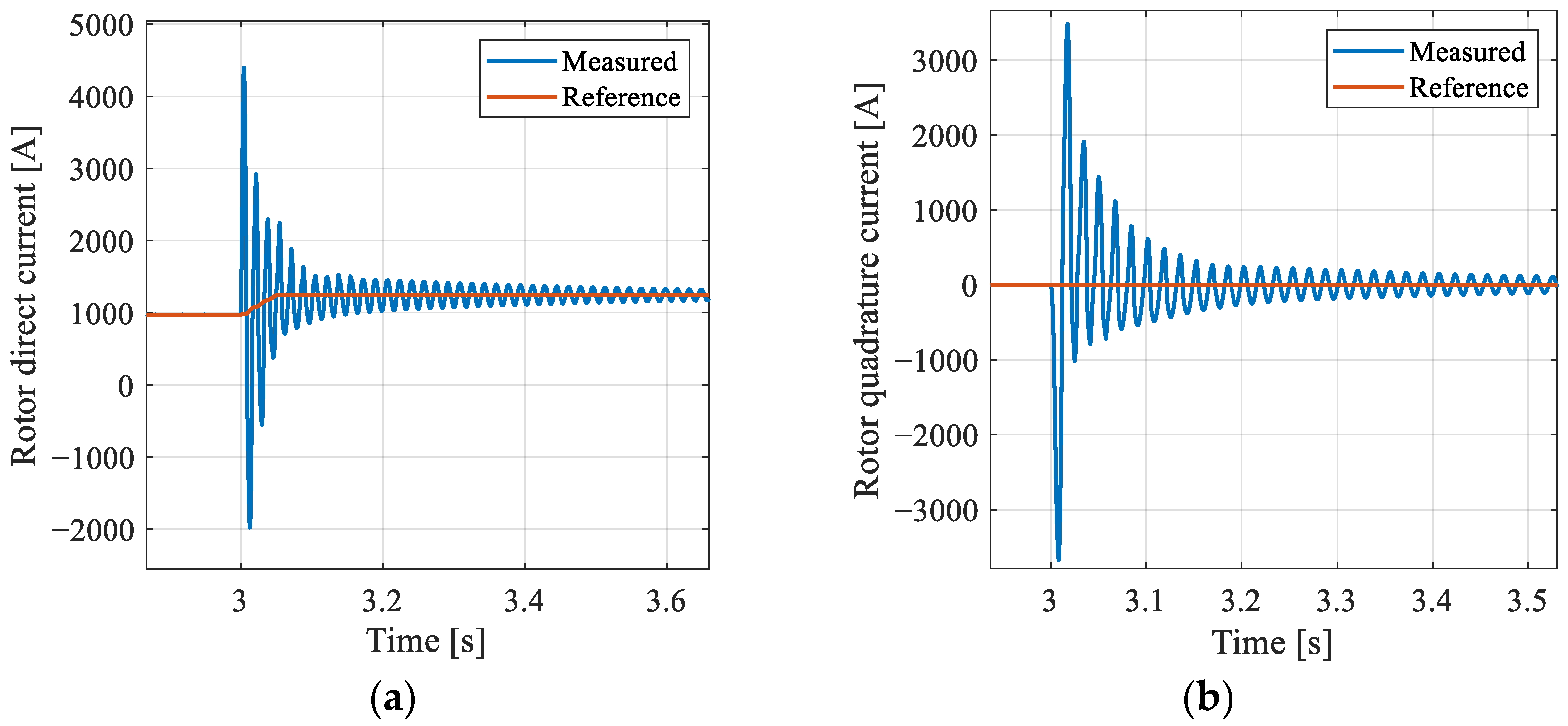
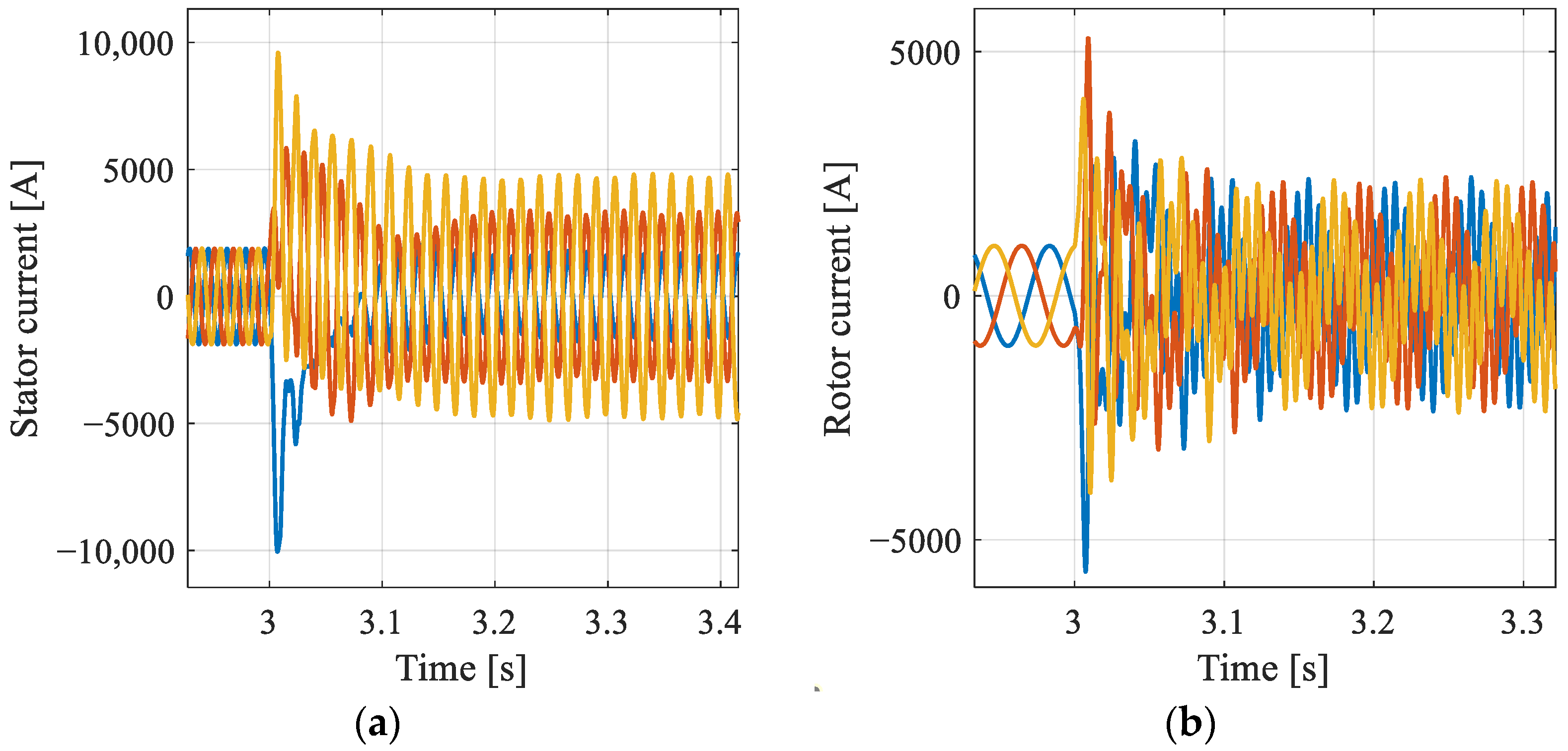
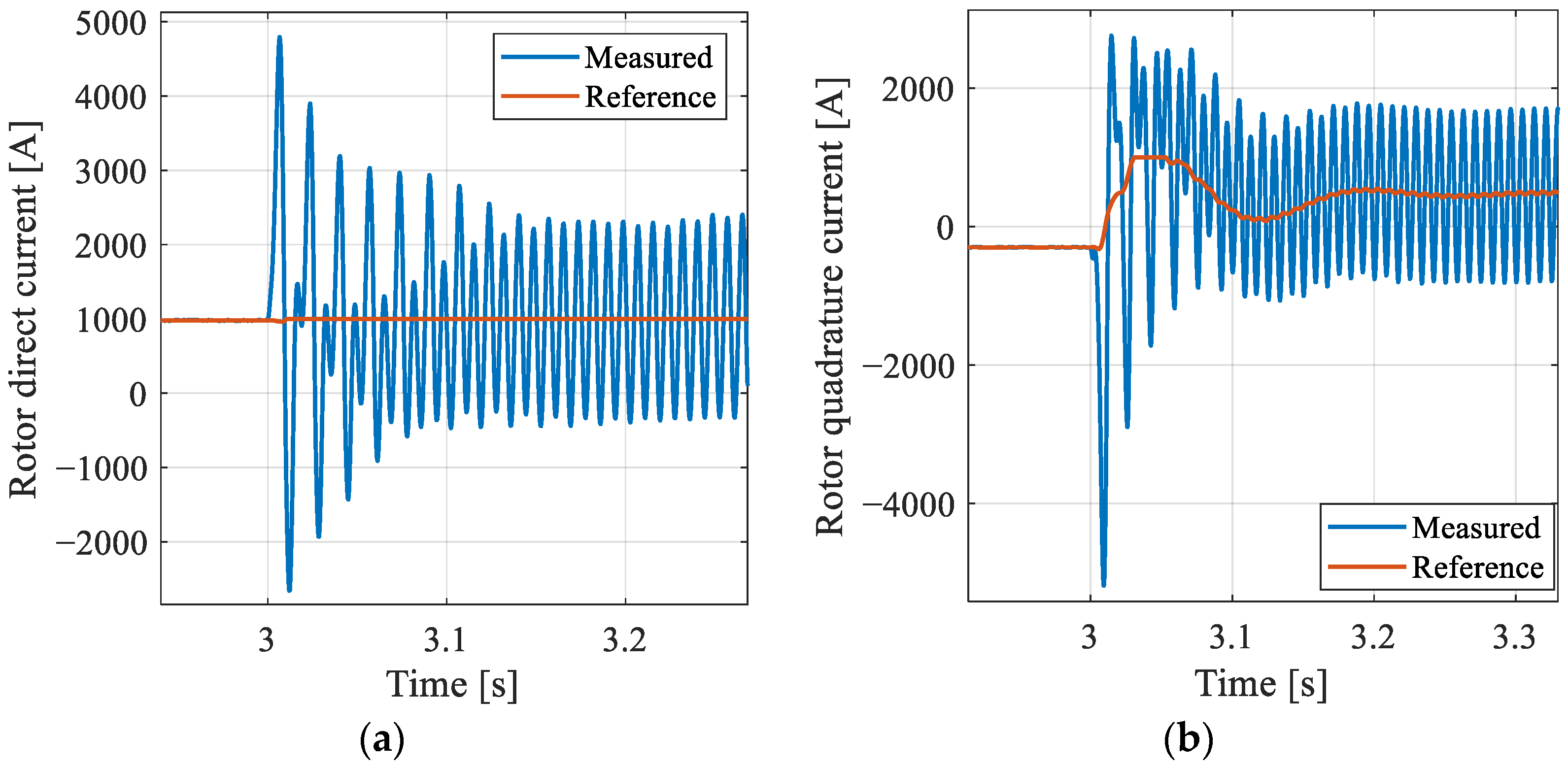
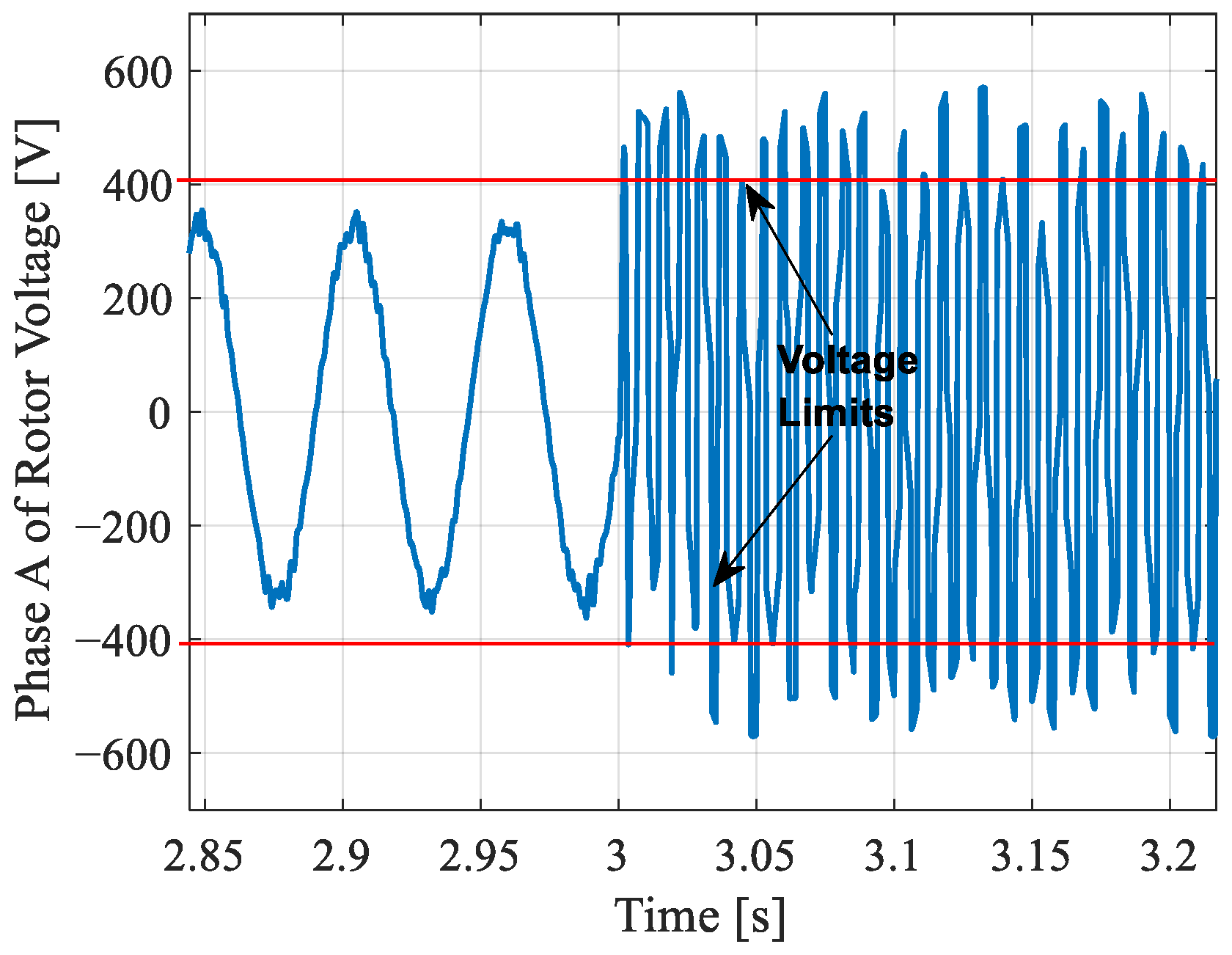
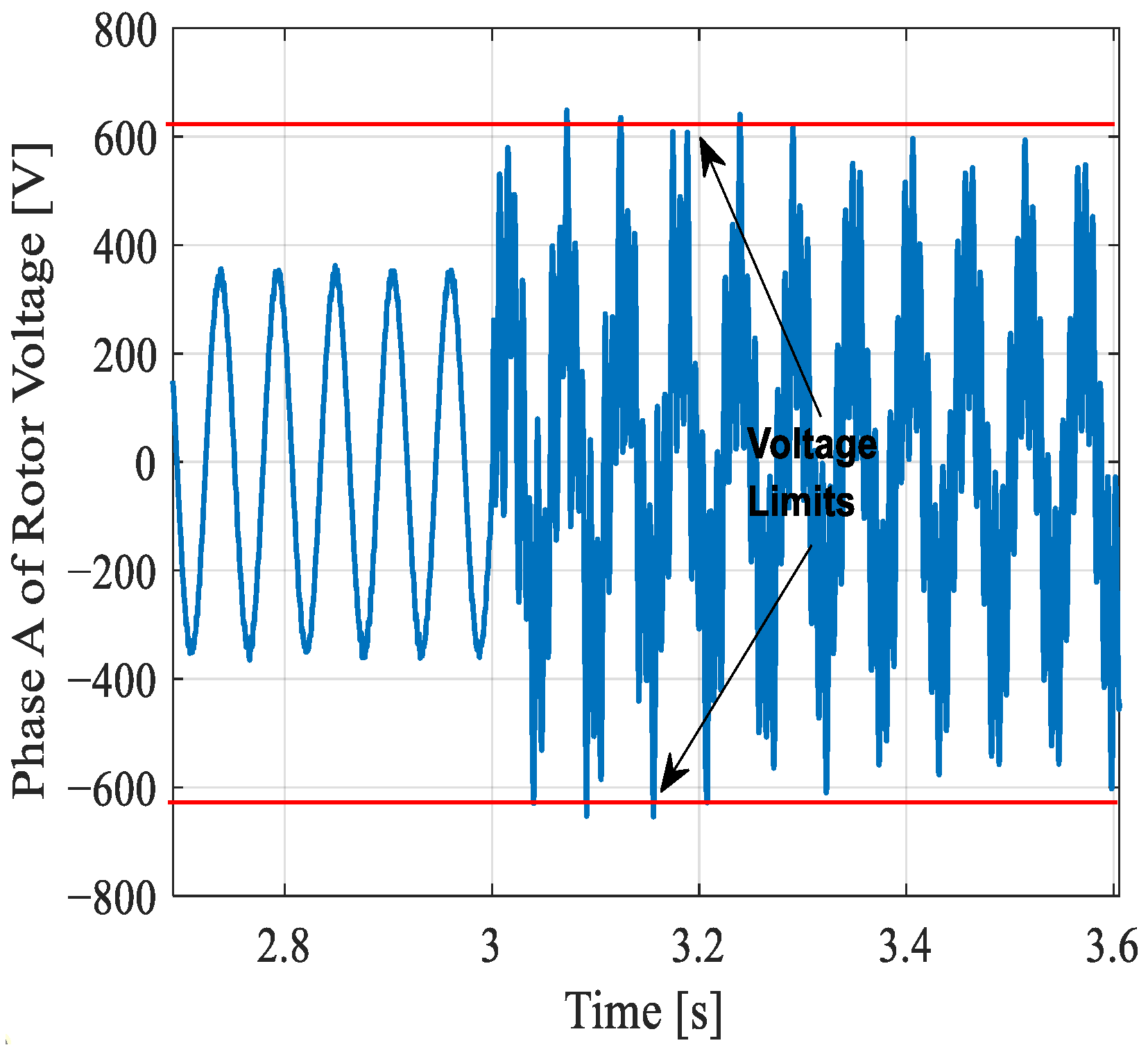
- During balanced sags, the main problem is the natural flux component, which induces a high voltage on the rotor, causing high oscillatory currents that may damage the converter;
- The natural component produces oscillations with the same frequency as that of the stator, which are reflected in the torque pulsations. This behavior is undesired from the point of view of the mechanical coupling between the generator and turbine;
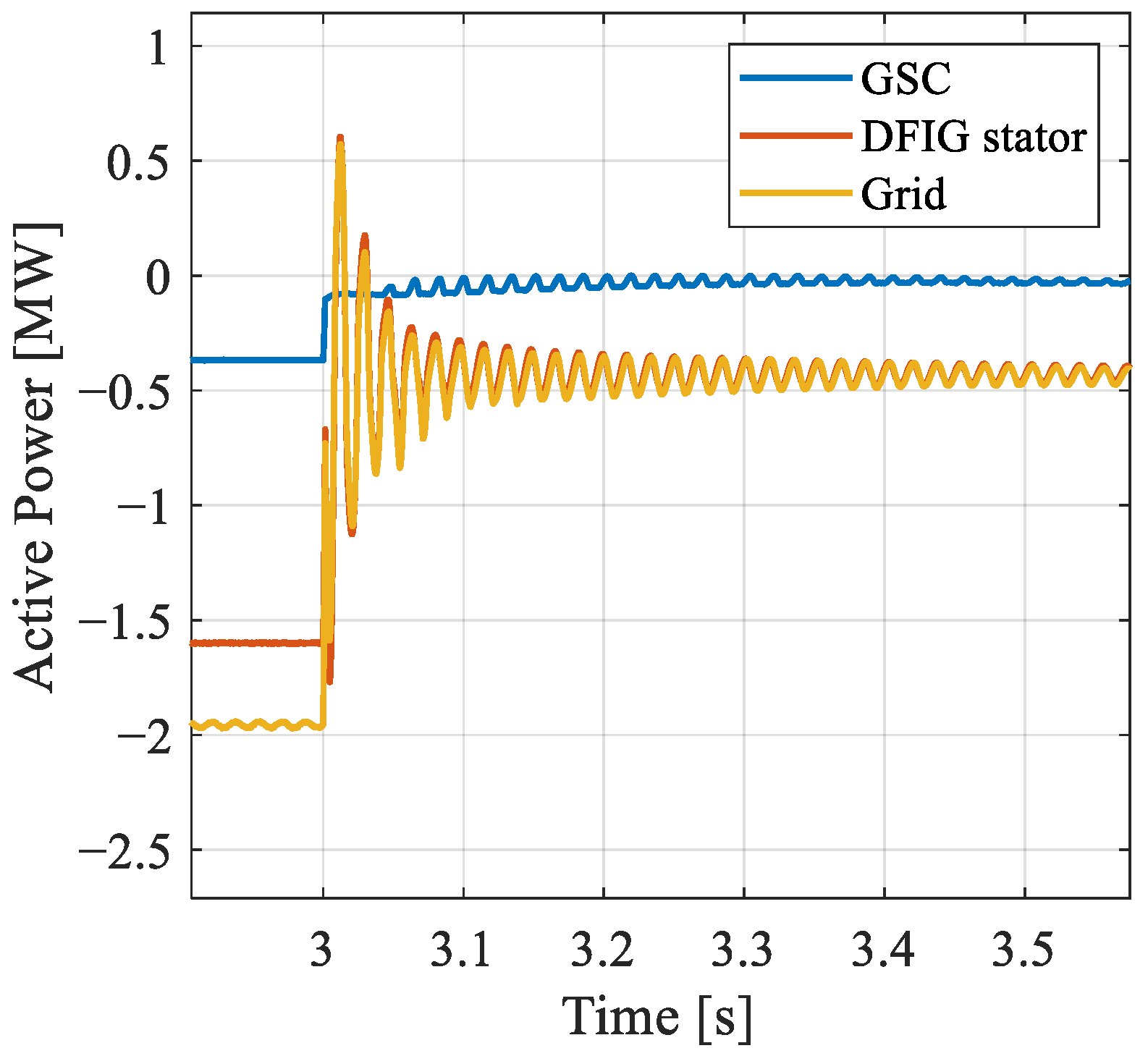
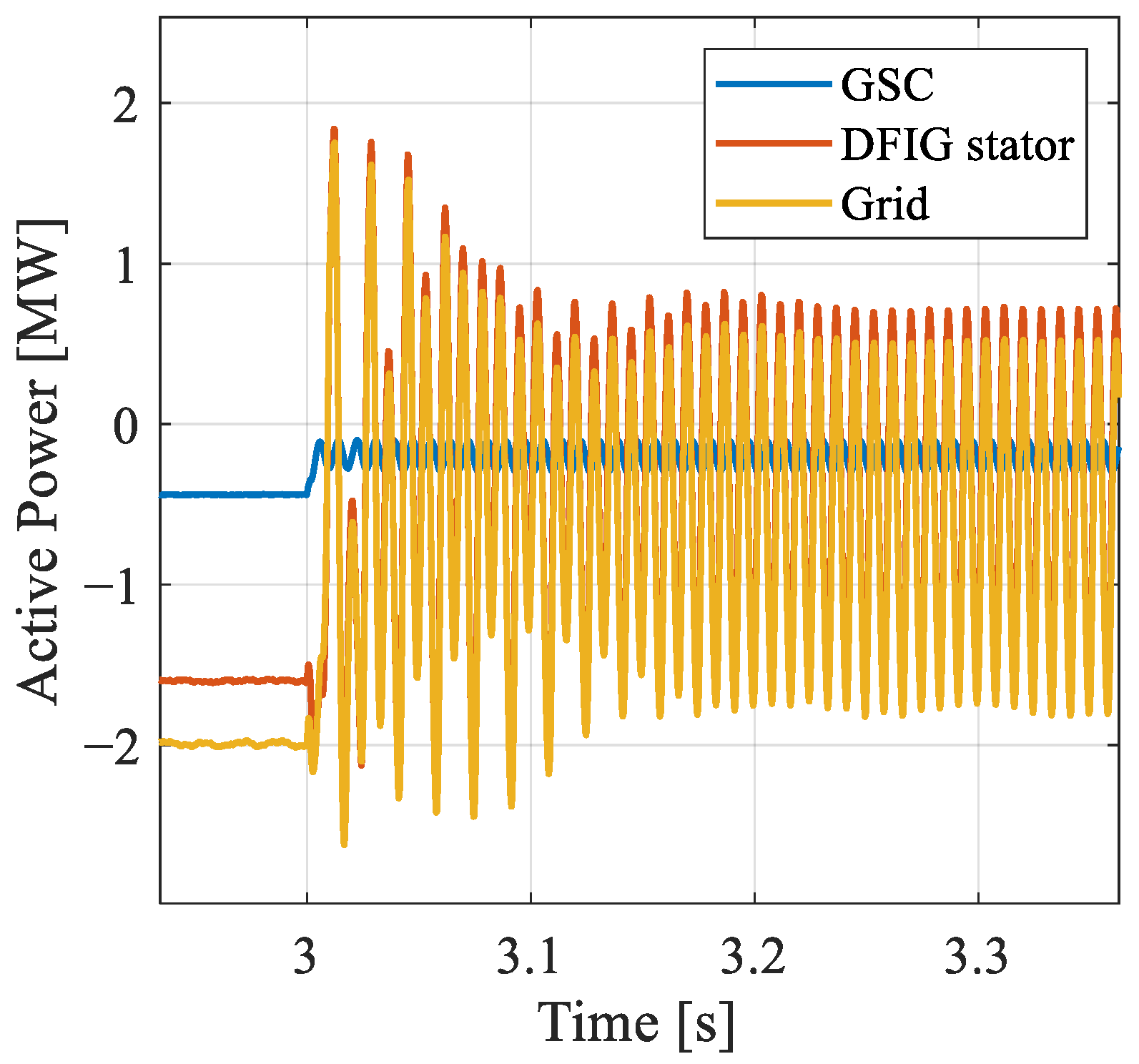
- The natural component of the stator currents causes power oscillations in the injected active and reactive powers, which are undesired from the point of view of the power system.
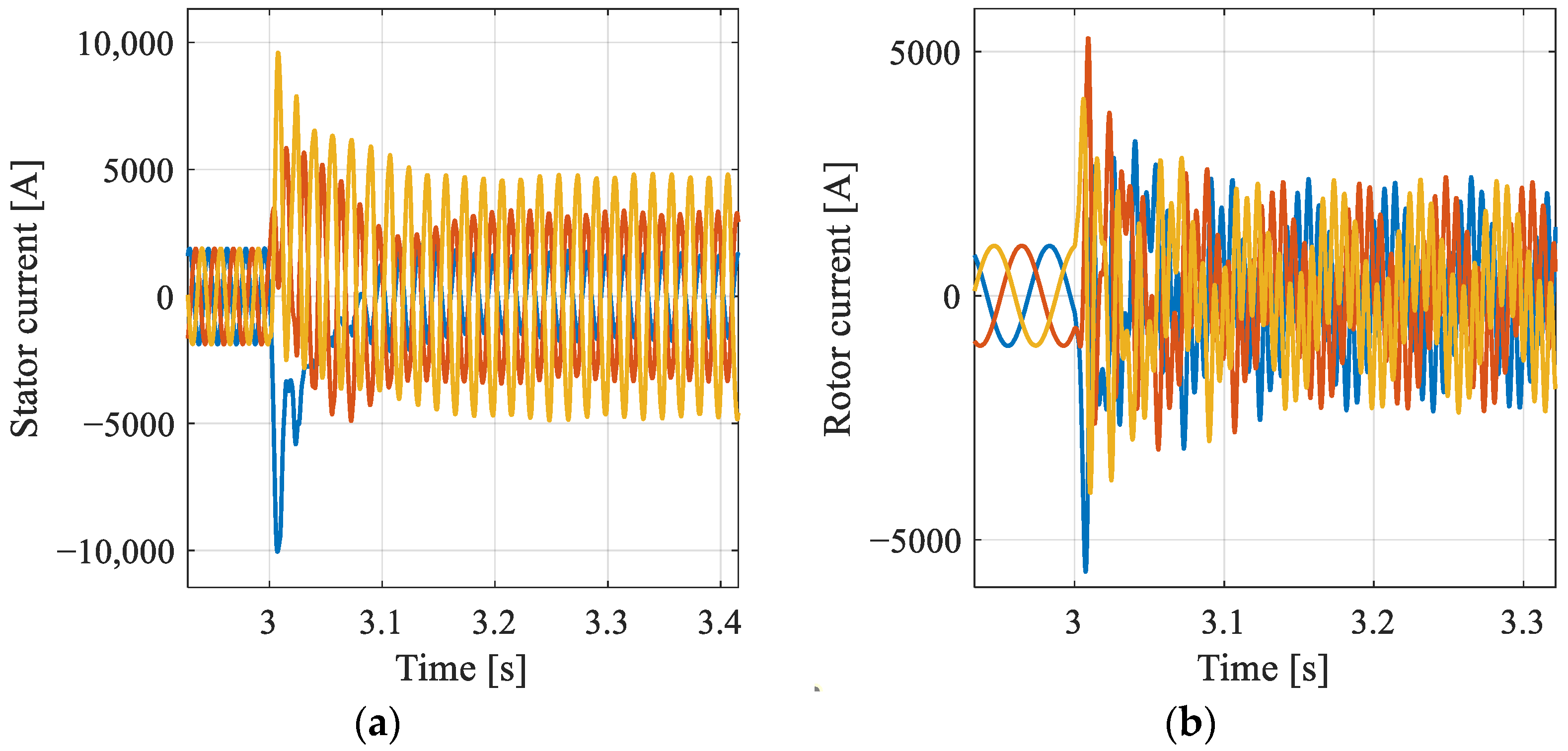
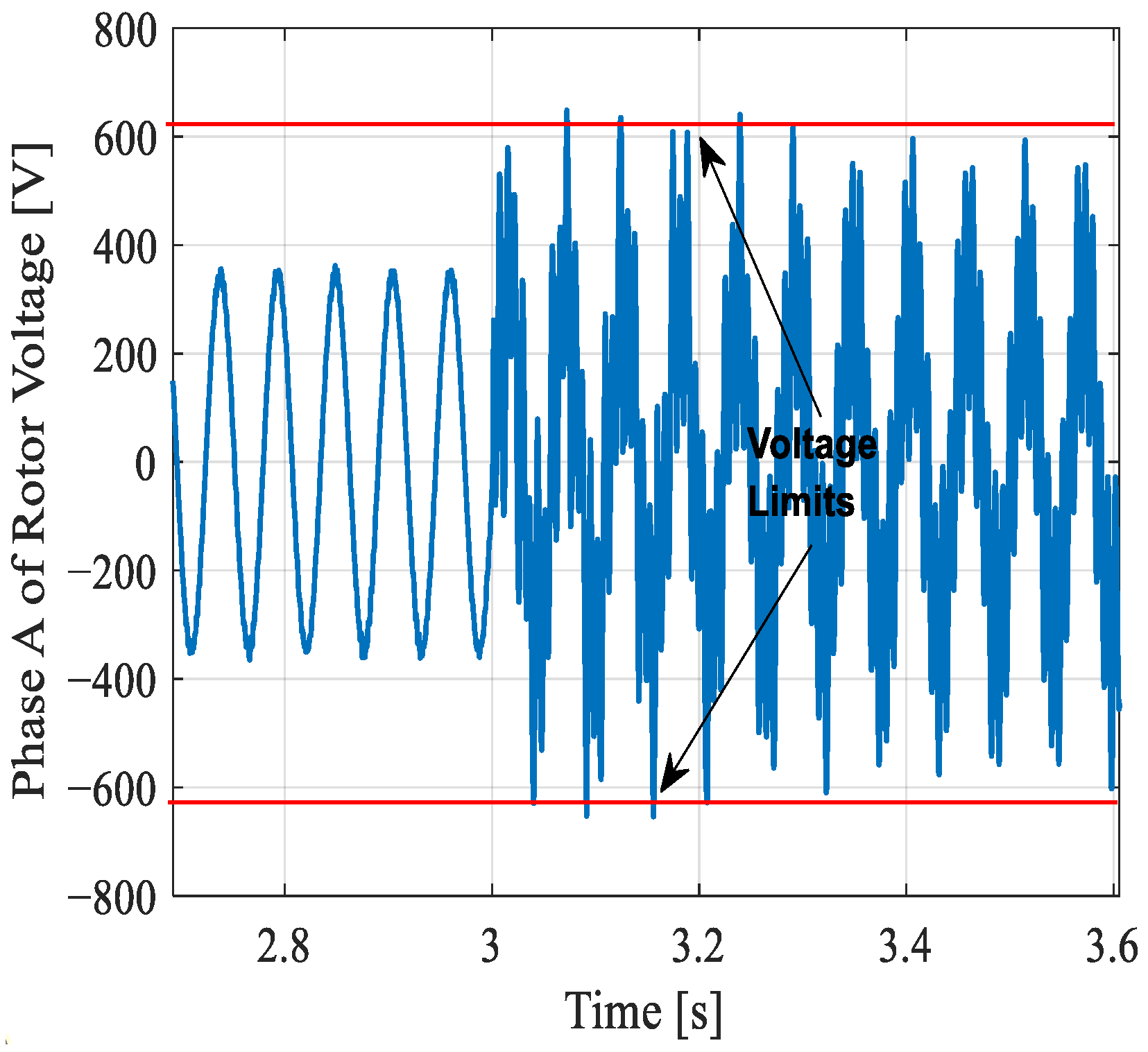
3.2. Unbalanced Voltage Sags
- During unbalanced sags, the negative-sequence component of the rotor voltage is the main cause of excessive rotor overcurrents.
- While the natural flux component decays, the negative sequence is present during all the sags with its amplitude dependent only on the unbalance.
- In the unbalanced case, the problem is even worse when there is also the presence of the natural component, since the overcurrents are caused by the sum of natural- and negative-sequence components.
- Electromagnetic torque and grid powers will oscillate with twice the grid frequency and higher amplitudes due to the natural- and negative-sequence components.
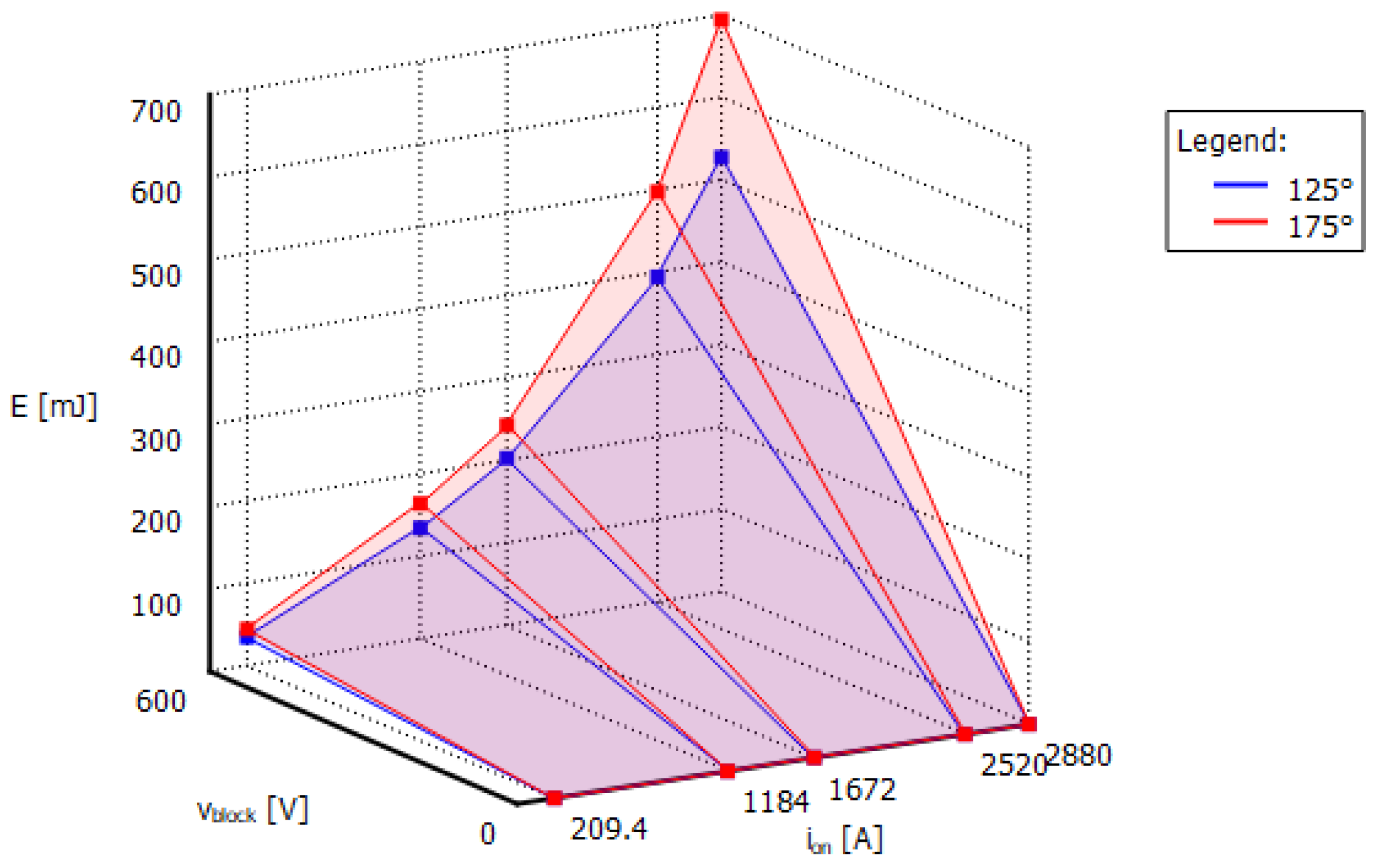
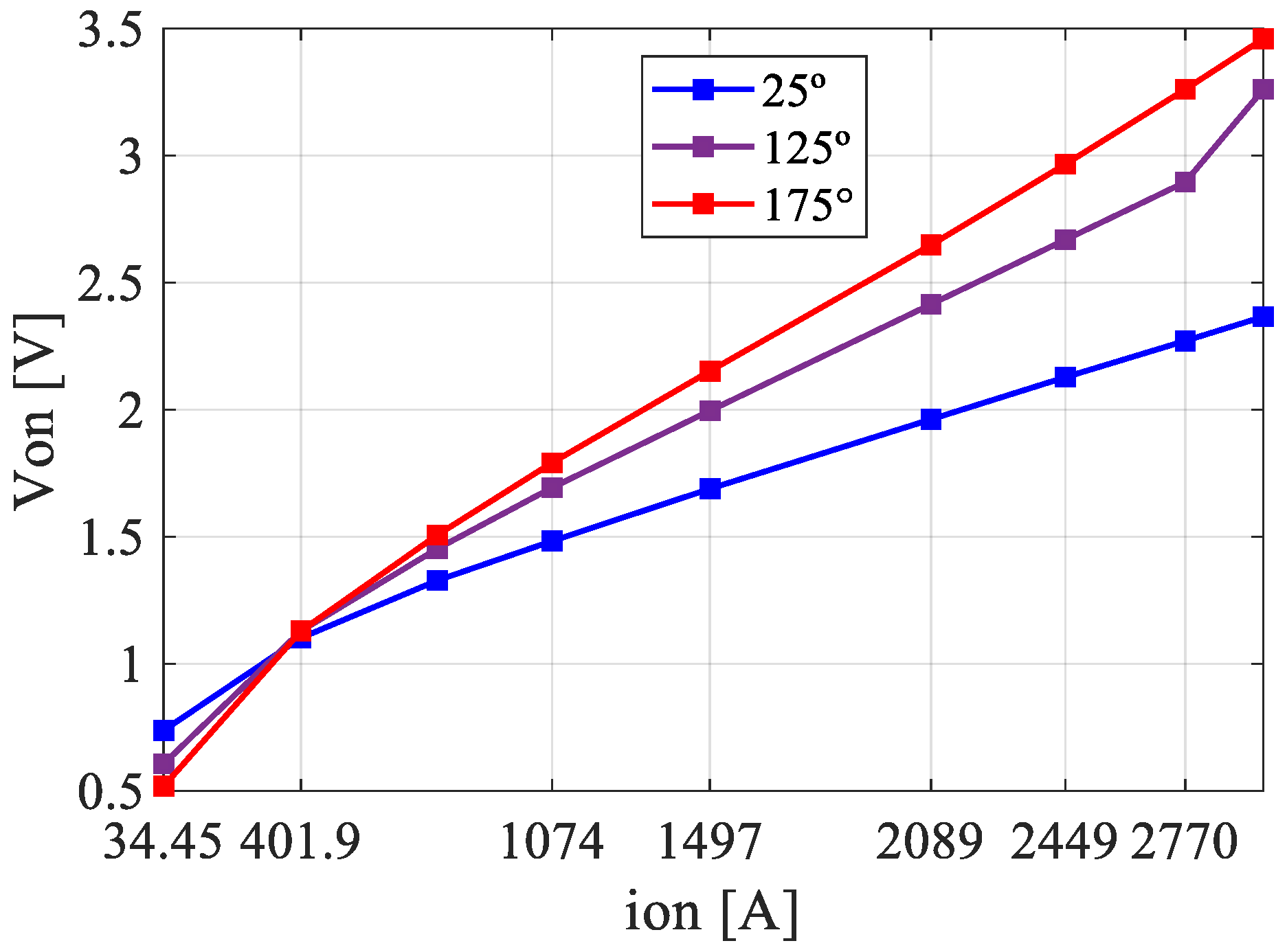
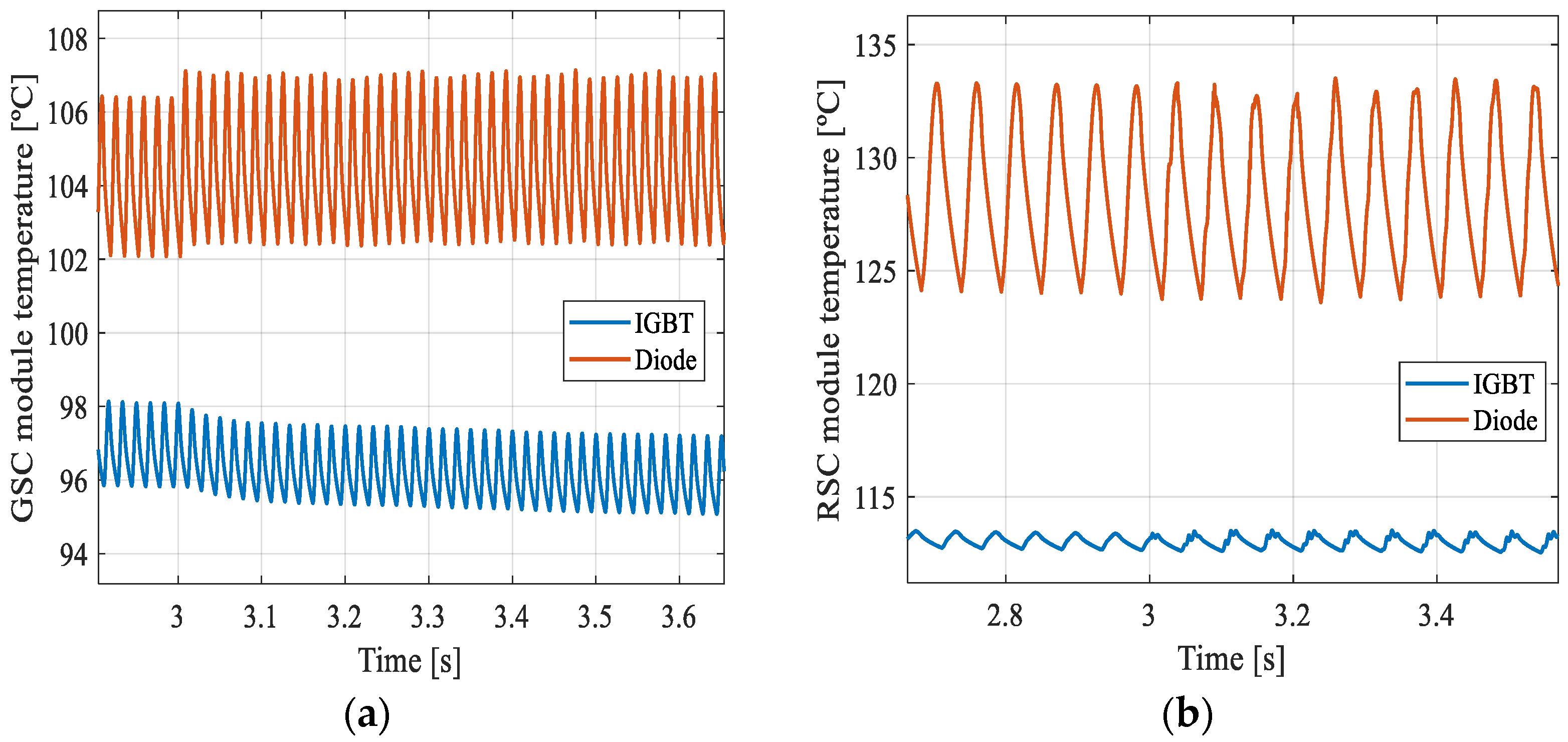
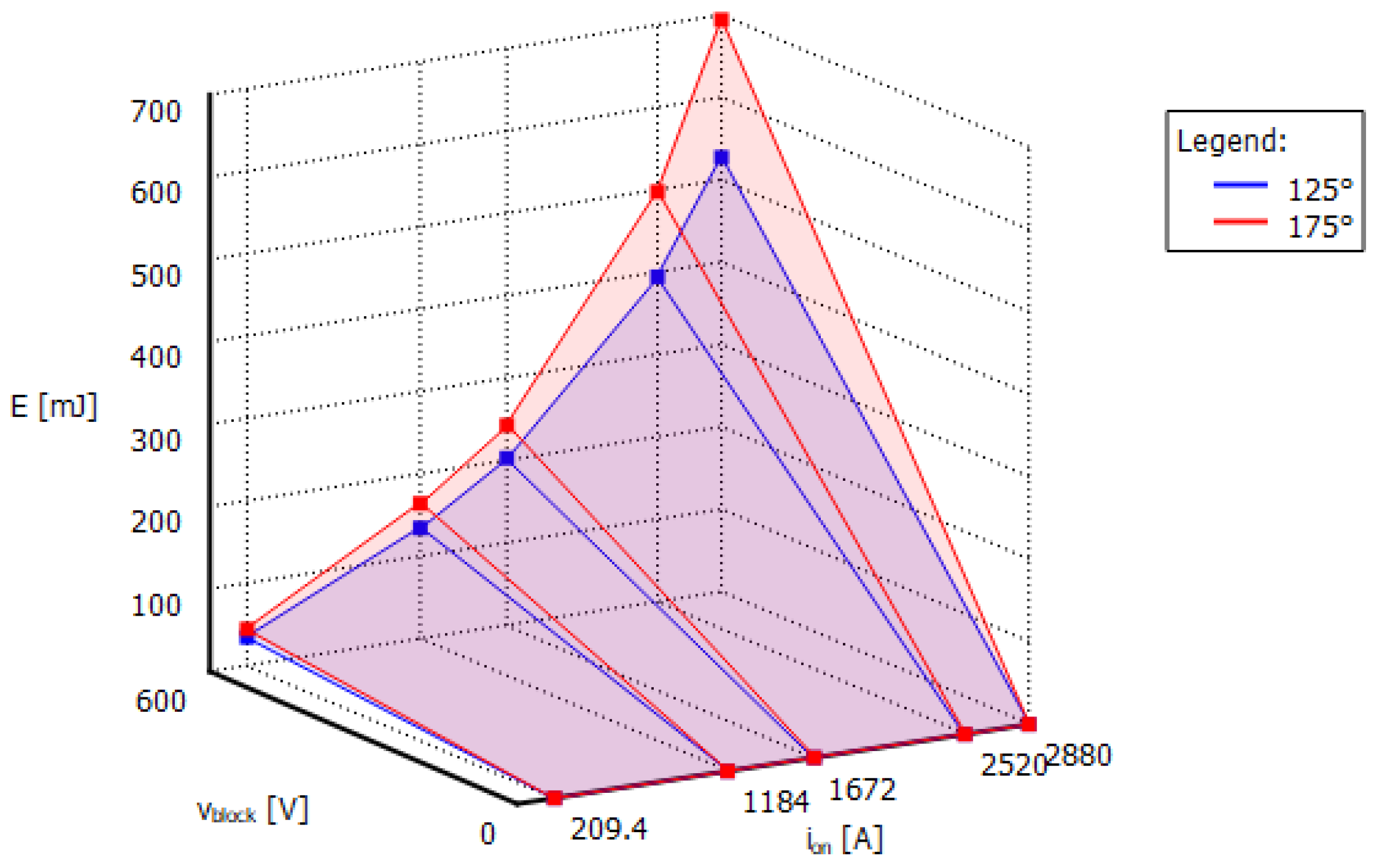
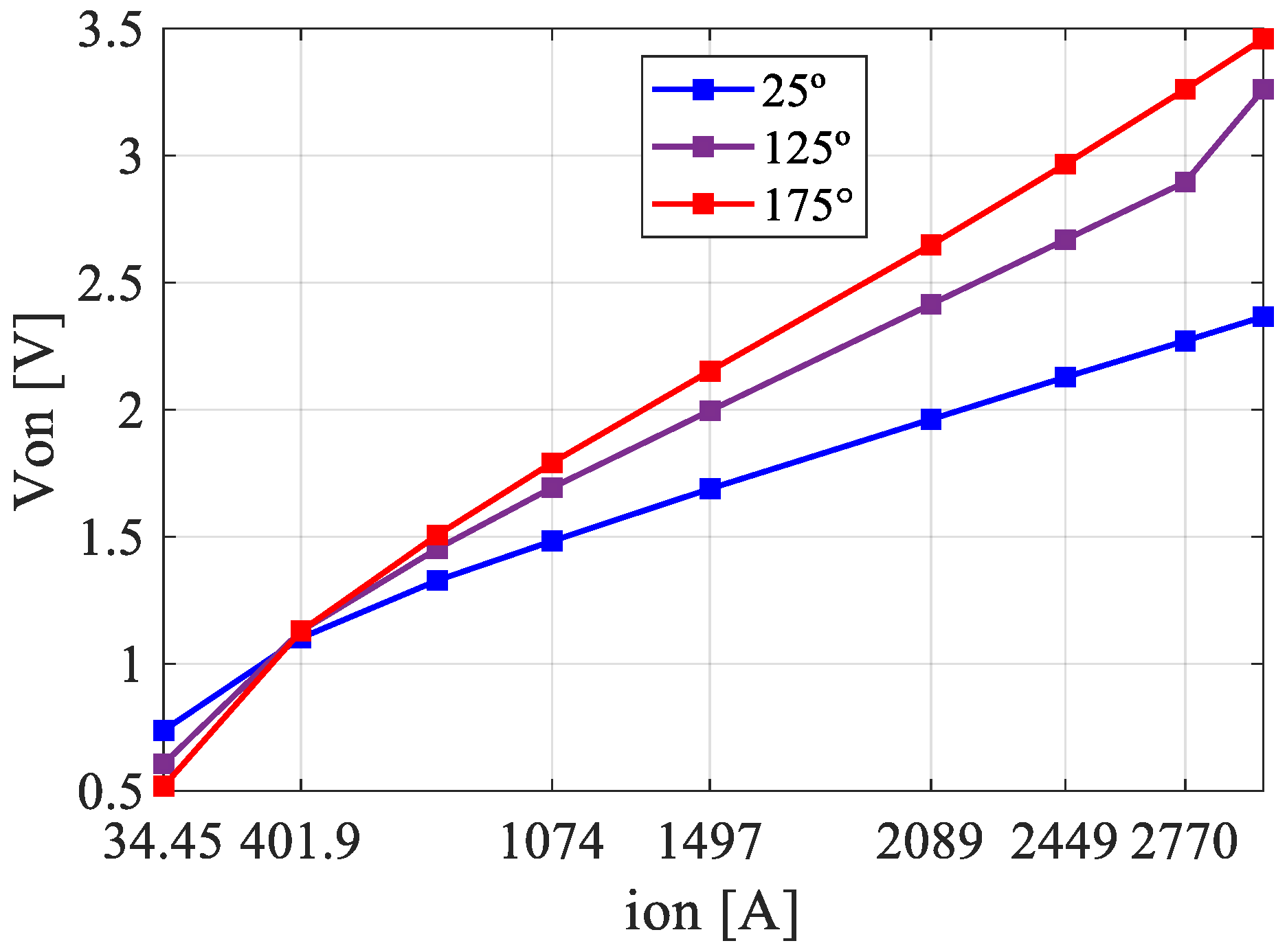
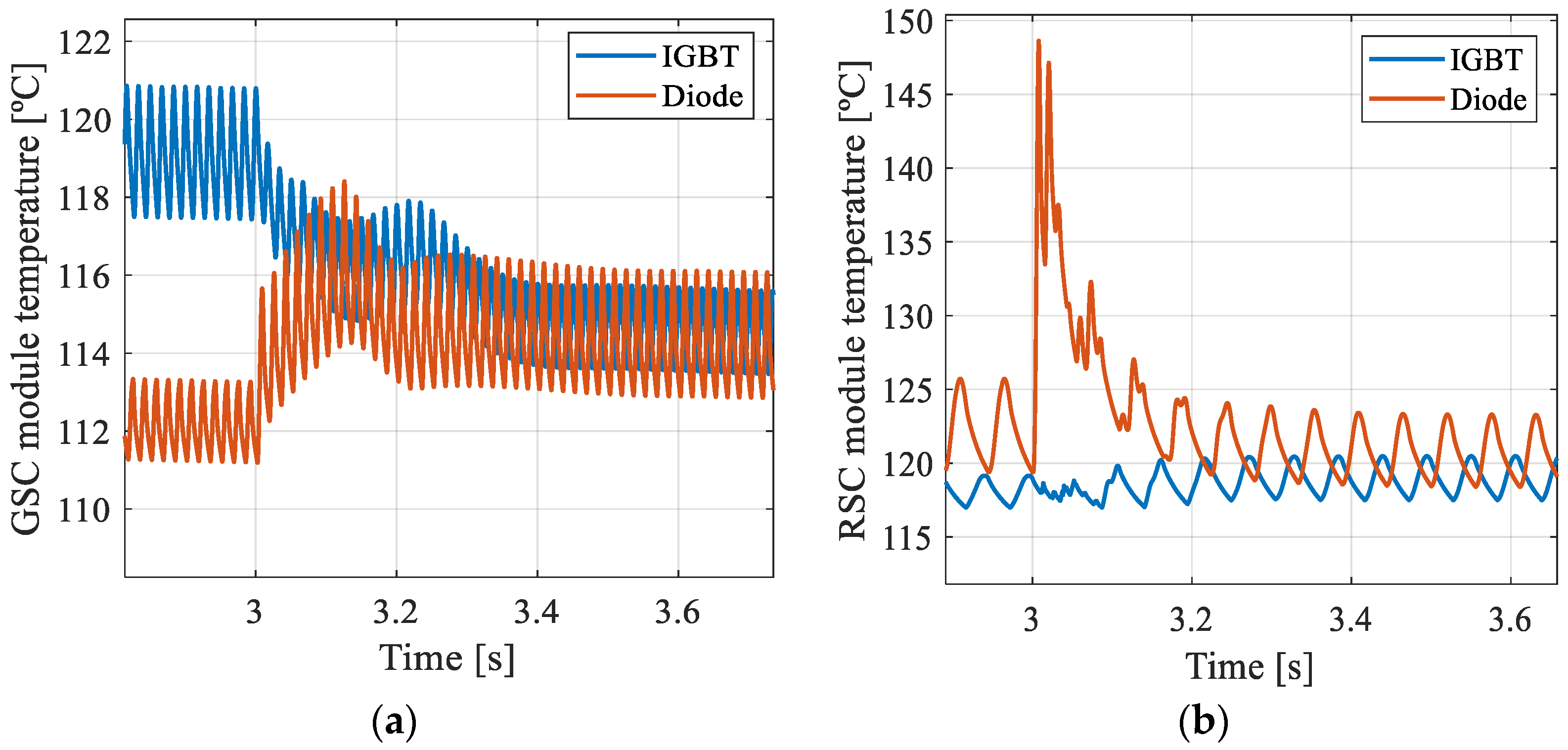
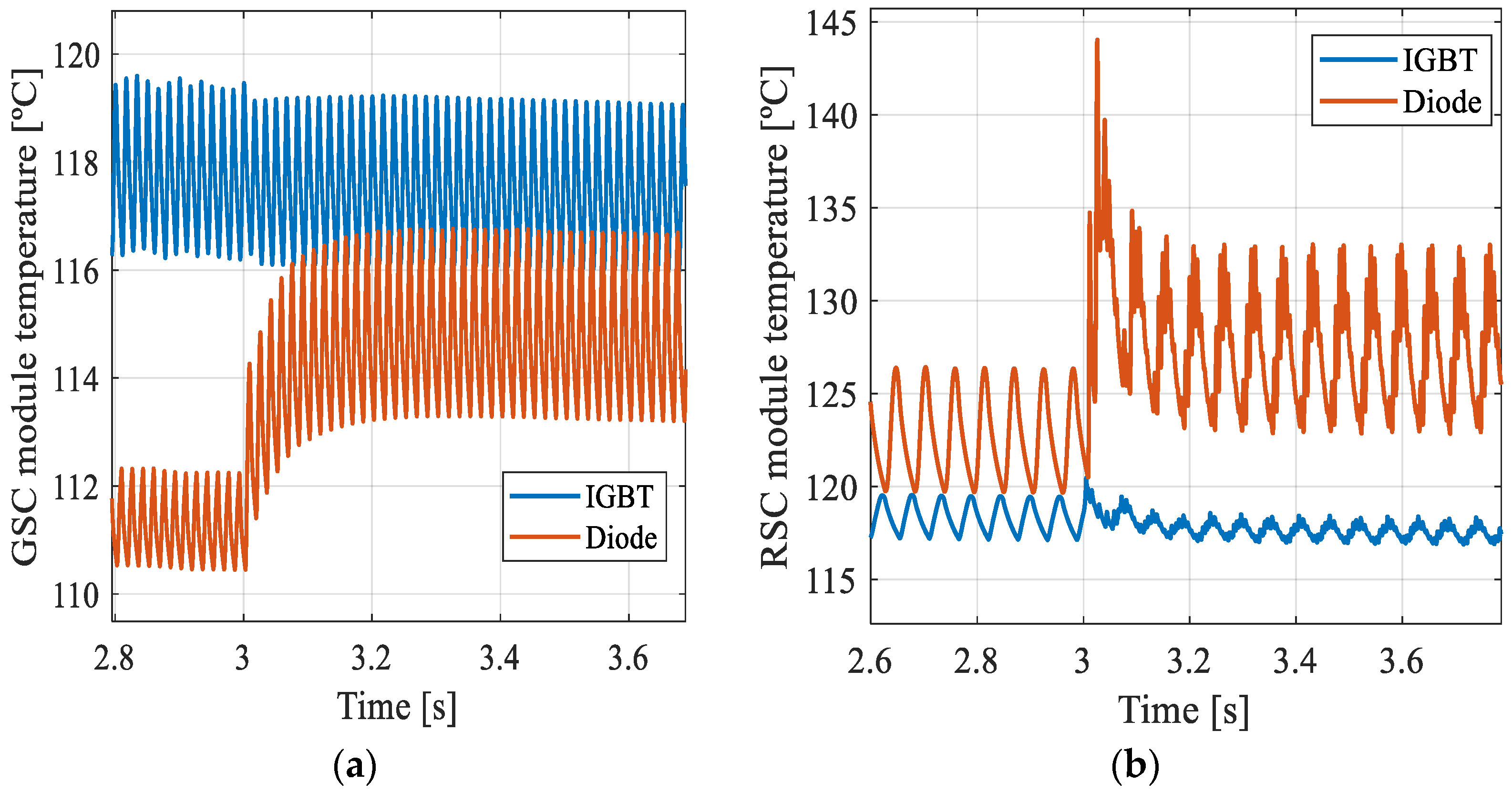
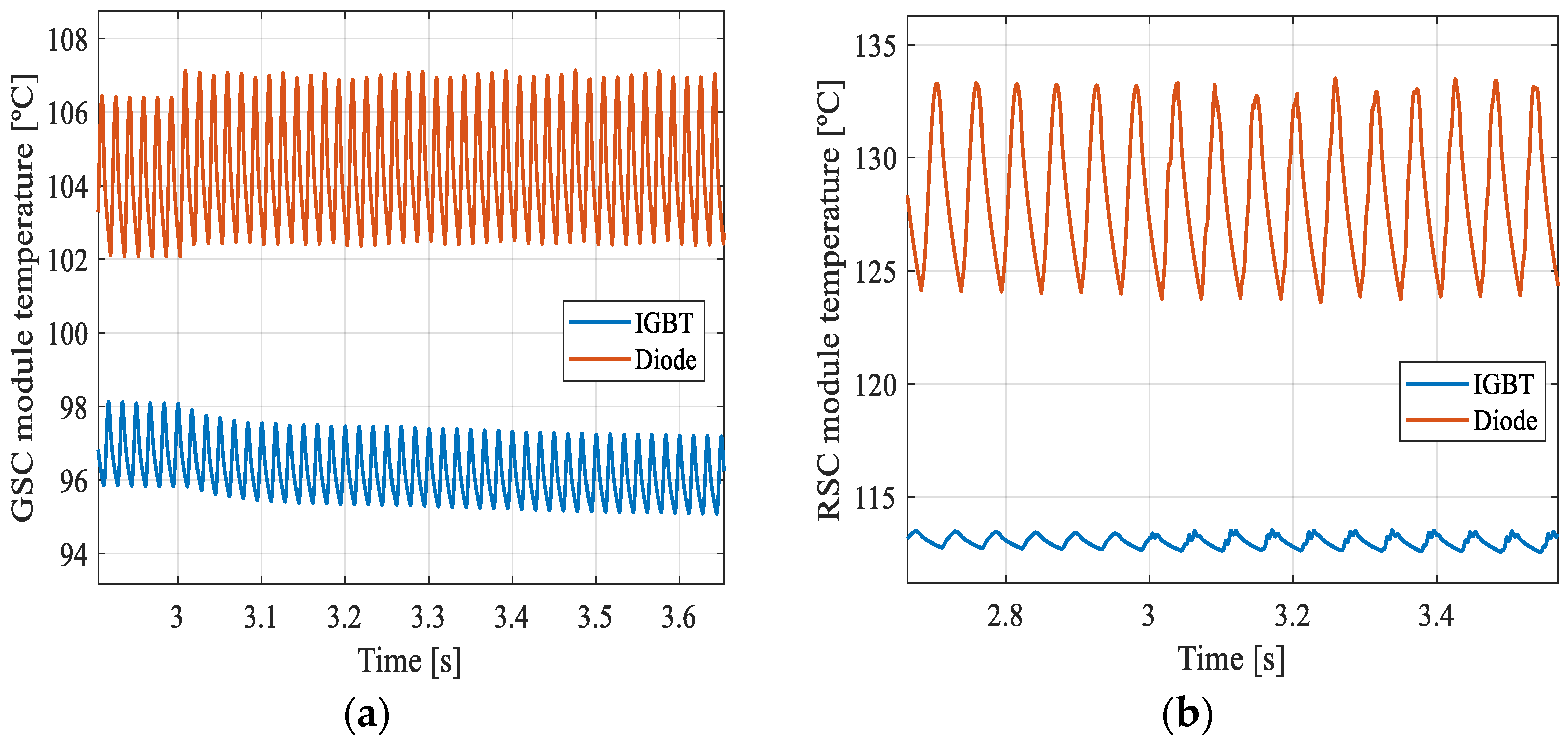
4. Thermal Modeling
5. Results and Discussion
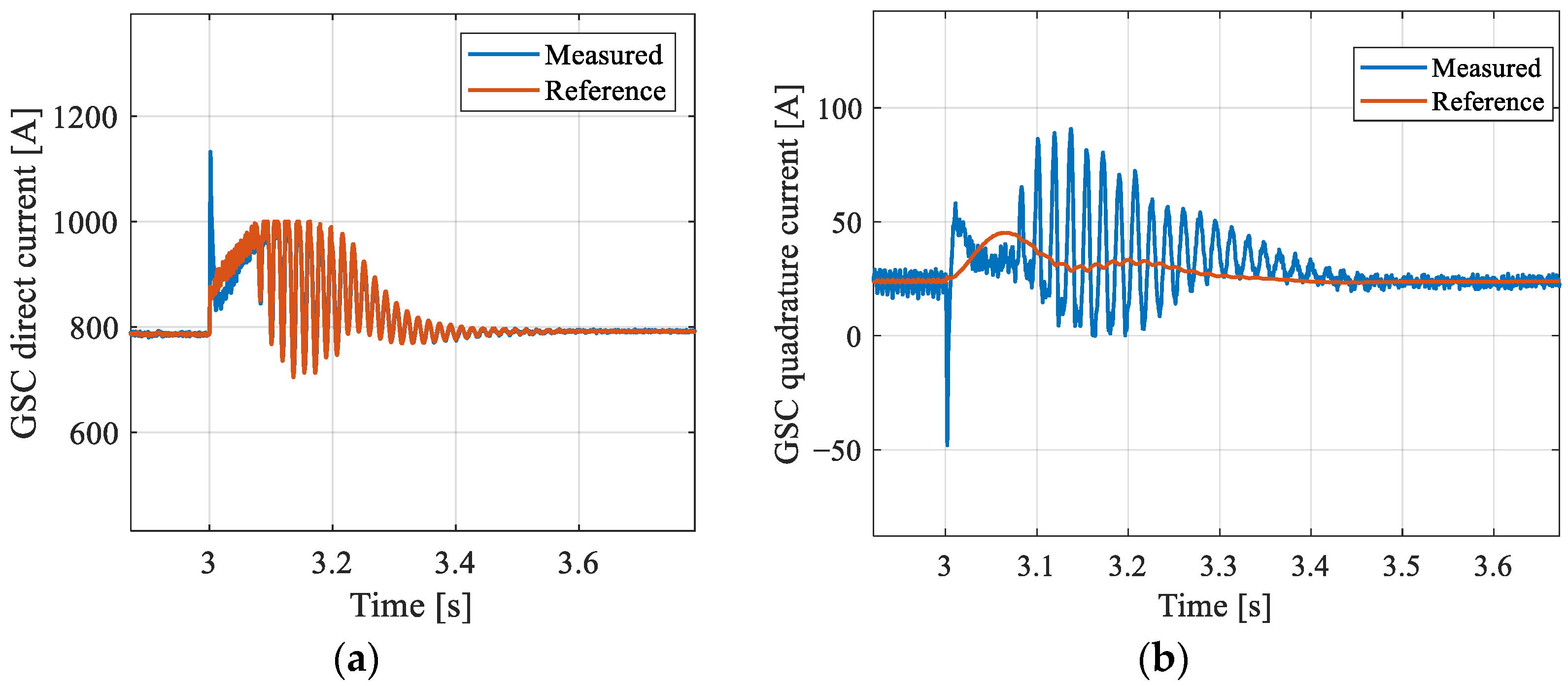
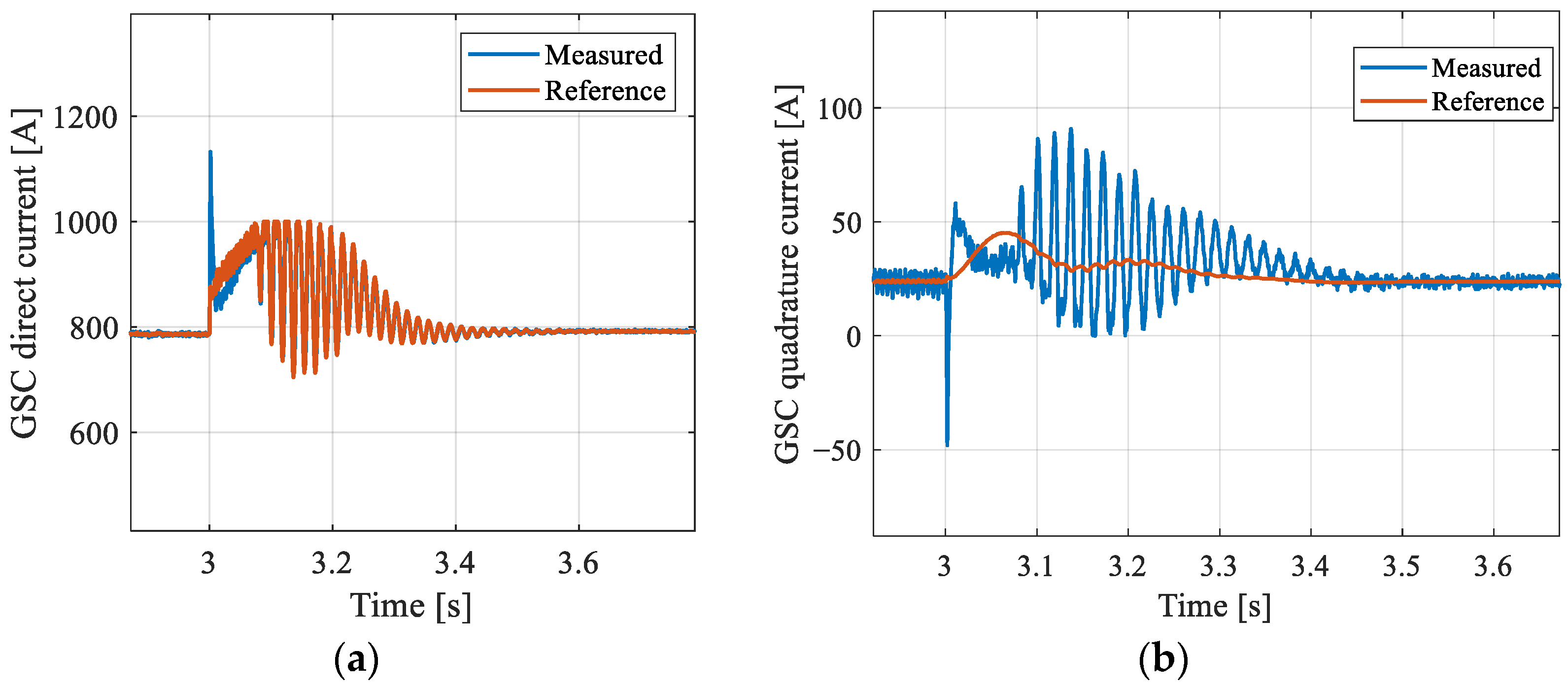
5.1. Balanced Voltage Sags
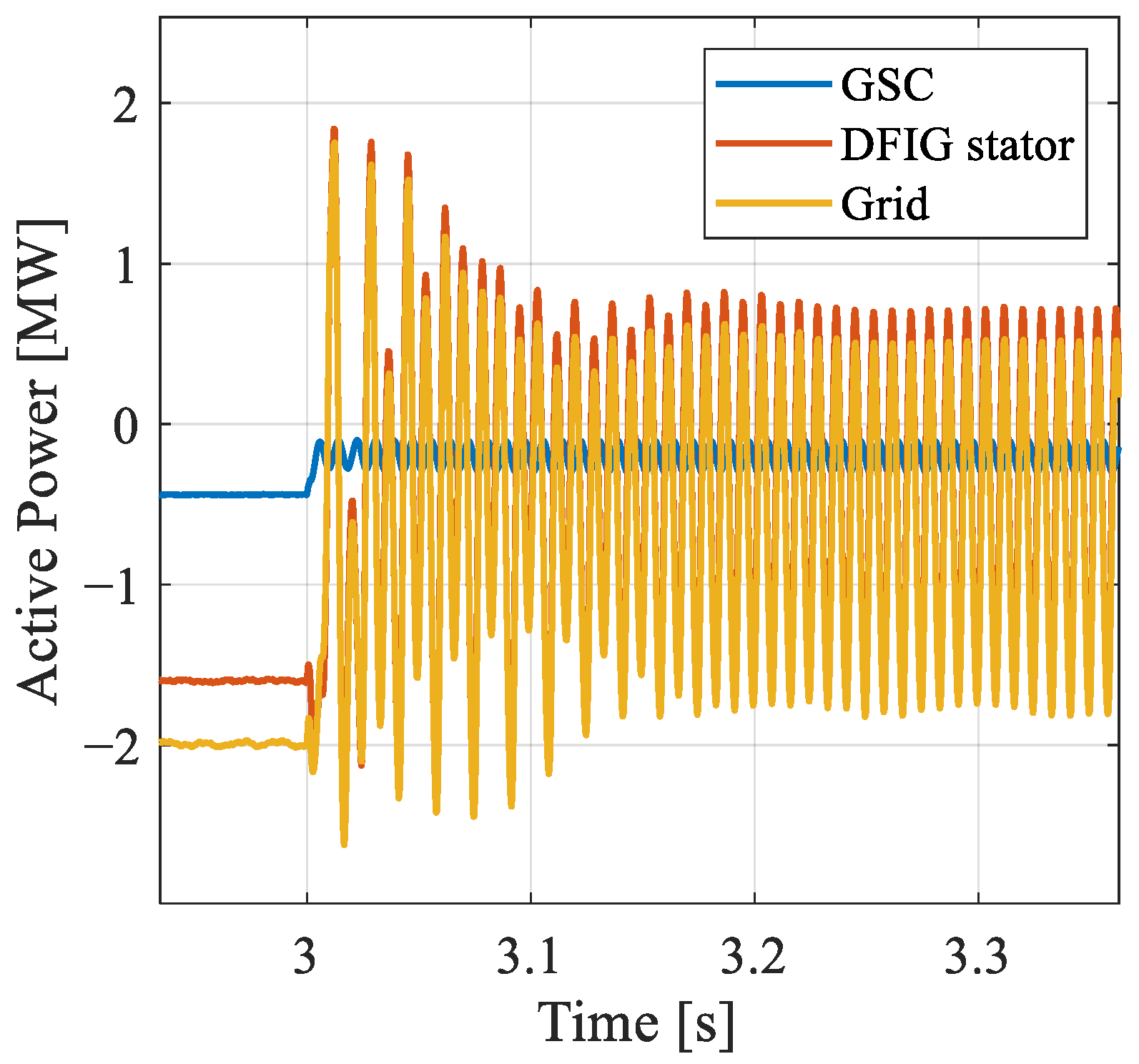
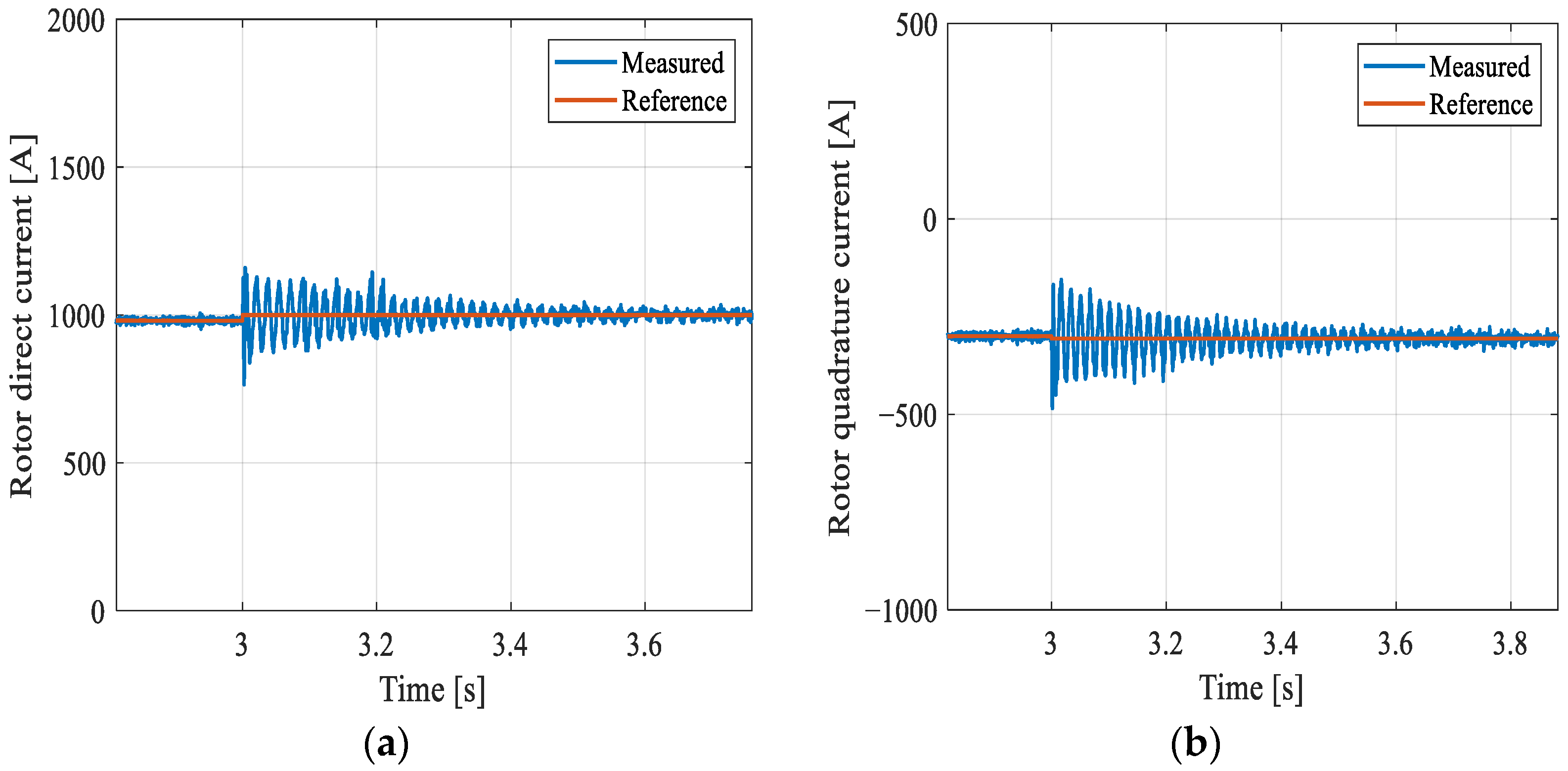
5.2. Unbalanced Voltage Sags
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Wind Energy Council. Global Wind Report 2021; Global Wind Energy Council: Brussels, Belgium, 2021. [Google Scholar]
- Shen, Y.; Zhang, B.; Liang, L.; Cui, T. A novel control strategy for enhancing the LVRT and voltage support capabilities of DFIG. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 121, p. 042035. [Google Scholar]
- Saeed, M.A.; Khan, H.M.; Ashraf, A.; Qureshi, S.A. Analyzing effectiveness of LVRT techniques for DFIG wind turbine system and implementation of hybrid combination with control schemes. Renew. Sustain. Energy Rev. 2018, 81, 2487–2501. [Google Scholar] [CrossRef]
- Xiang, D.; Ran, L.; Tavner, P.J.; Yang, S. Control of a doubly fed induction generator in a wind turbine during grid fault ride-through. IEEE Trans. Energy Convers. 2006, 21, 652–662. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Xu, Z.; Ostergaard, J.; Dong, Z.Y.; Wong, K.P. Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Trans. Power Syst. 2011, 27, 713–722. [Google Scholar] [CrossRef] [Green Version]
- ONS. Procedimentos de Rede—Submódulo 3.6: Requisitos Técnicos Mínimos Para a Conexão à Rede Básica; ONS: Rio de Janeiro, Brazil, 2009.
- Justo, J.; Bansal, R. Parallel R-L configuration crowbar with series R-L circuit protection for LVRT strategy of DFIG under transient-state. Electr. Power Syst. Res. 2018, 154, 299–310. [Google Scholar] [CrossRef]
- Naderi, S.B.; Negnevitsky, M.; Muttaqi, K.M. A modified DC chopper for limiting the fault current and controlling the DC-link voltage to enhance fault ride-through capability of doubly-fed induction-generator-based wind turbine. IEEE Trans. Ind. Appl. 2018, 55, 2021–2032. [Google Scholar] [CrossRef]
- Gray, C.; Buque, C.; Chowdhury, S. AC series dynamic resistor protection scheme with switching control for doubly fed induction generator based WECS. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Kim, J.; Muljadi, E.; Gevorgian, V.; Hoke, A.F. Dynamic capabilities of an energy storage-embedded DFIG system. IEEE Trans. Ind. Appl. 2019, 55, 4124–4134. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, L.; Sang, S.; Xue, X.; Zhang, X.; Sun, T.; Wu, W.; Gao, N. Optimized series dynamic braking resistor for LVRT of doubly-fed induction generator with uncertain fault scenarios. IEEE Access 2022, 10, 22533–22546. [Google Scholar] [CrossRef]
- Liang, J.; Qiao, W.; Harley, R.G. Feed-forward transient current control for low-voltage ride-through enhancement of DFIG wind turbines. IEEE Trans. Energy Convers. 2010, 25, 836–843. [Google Scholar] [CrossRef]
- Zhu, D.; Zou, X.; Deng, L.; Huang, Q.; Zhou, S.; Kang, Y. Inductance-emulating control for DFIG-based wind turbine to ride-through grid faults. IEEE Trans. Power Electron. 2016, 32, 8514–8525. [Google Scholar] [CrossRef]
- Zhu, D.; Zou, X.; Zhou, S.; Dong, W.; Kang, Y.; Hu, J. Feedforward current references control for DFIG-based wind turbine to improve transient control performance during grid faults. IEEE Trans. Energy Convers. 2017, 33, 670–681. [Google Scholar] [CrossRef]
- Liang, J.; Howard, D.F.; Restrepo, J.A.; Harley, R.G. Feedforward transient compensation control for DFIG wind turbines during both balanced and unbalanced grid disturbances. IEEE Trans. Ind. Appl. 2013, 49, 1452–1463. [Google Scholar] [CrossRef]
- Liu, R.; Yao, J.; Wang, X.; Sun, P.; Pei, J.; Hu, J. Dynamic stability analysis and improved LVRT schemes of DFIG-based wind turbines during a symmetrical fault in a weak grid. IEEE Trans. Power Electron. 2019, 35, 303–318. [Google Scholar] [CrossRef]
- Ruiz-Cruz, R.; Sanchez, E.N.; Loukianov, A.G.; Ruz-Hernandez, J.A. Real-time neural inverse optimal control for a wind generator. IEEE Trans. Sustain. Energy 2018, 10, 1172–1183. [Google Scholar] [CrossRef]
- Ozsoy, E.; Padmanaban, S.; Mihet-Popa, L.; Fedák, V.; Ahmad, F.; Akhtar, R.; Sabanovic, A. Control strategy for a grid-connected inverter under unbalanced network conditions—A disturbance observer-based decoupled current approach. Energies 2017, 10, 1067. [Google Scholar] [CrossRef] [Green Version]
- Kong, X.; Wang, X.; Abdelbaky, M.A.; Liu, X.; Lee, K.Y. Nonlinear MPC for DFIG-based wind power generation under unbalanced grid conditions. Int. J. Electr. Power Energy Syst. 2022, 134, 107416. [Google Scholar] [CrossRef]
- Xiong, L.; Li, P.; Wang, J. High-order sliding mode control of DFIG under unbalanced grid voltage conditions. Int. J. Electr. Power Energy Syst. 2020, 117, 105608. [Google Scholar] [CrossRef]
- Rafiee, Z.; Heydari, R.; Rafiee, M.; Aghamohammadi, M.R.; Blaabjerg, F. Enhancement of the LVRT capability for DFIG-based wind farms based on short-circuit capacity. IEEE Syst. J. 2022, 1–12. [Google Scholar] [CrossRef]
- Hiremath, R.; Moger, T. Modified Super Twisting algorithm based sliding mode control for LVRT enhancement of DFIG driven wind system. Energy Reports 2022, 8, 3600–3613. [Google Scholar] [CrossRef]
- Mendes, V.F.; de Sousa, C.V.; Silva, S.; Rabelo, B.C.; Hofmann, W. Modeling and ride-through control of doubly fed induction generators during symmetrical voltage sags. IEEE Trans. Energy Convers. 2011, 26, 1161–1171. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, J.; Zhou, S. Improved demagnetization control of a doubly-fed induction generator under balanced grid fault. IEEE Trans. Power Electron. 2014, 30, 6695–6705. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ma, K.; Zhou, D. Power electronics and reliability in renewable energy systems. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 19–30. [Google Scholar]
- Zhou, D.; Blaabjerg, F. Thermal analysis of two-level wind power converter under symmetrical grid fault. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1904–1909. [Google Scholar]
- Zhou, D.; Blaabjerg, F.; Lau, M.; Tonnes, M. Thermal behavior of doubly-fed induction generator wind turbine system during balanced grid fault. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition-APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 3076–3083. [Google Scholar]
- Wintrich, A.; Nicolai, U.; Tursky, W.; Reimann, T. Application Manual—Power Semiconductors; Semikron International GmbH: Nuremberg, Germany, 2011. [Google Scholar]
- Behjati, H.; Davoudi, A. Reliability analysis framework for structural redundancy in power semiconductors. IEEE Trans. Ind. Electron. 2013, 10, 4376–4386. [Google Scholar] [CrossRef]
- Musarrat, M.N.; Islam, M.R.; Muttaqi, K.; Sutanto, D.; Rahman, M.A. Improving the thermal performance of rotor-side converter of doubly-fed induction generator wind turbine while operating around synchronous speed. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 3, 298–307. [Google Scholar] [CrossRef]
- Zhou, D.; Blaabjerg, F. Optimized demagnetizing control of DFIG power converter for reduced thermal stress during symmetrical grid fault. IEEE Trans. Power Electron. 2018, 33, 10326–10340. [Google Scholar] [CrossRef]
- Kovács, P.K. Transient Phenomena in Electrical Machines; Elsevier: Amsterdam, The Netherlands, 1984. [Google Scholar]
- Pena, R.; Clare, J.; Asher, G. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc.-Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, P.; Teodorescu, R.; Candela, I.; Timbus, A.V.; Liserre, M.; Blaabjerg, F. New positive-sequence voltage detector for grid synchronization of power converters under faulty grid conditions. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–7. [Google Scholar]
- Mendes, V.F.; de Sousa, C.V.; Hofmann, W.; Silva, S.R. Doubly-fed induction generator ride-through fault capability using resonant controllers for asymmetrical voltage sags. IET Renew. Power Gener. 2015, 9, 783–791. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Hu, J.; He, Y. Modeling and enhanced control of DFIG under unbalanced grid voltage conditions. Electr. Power Syst. Res. 2009, 79, 273–281. [Google Scholar] [CrossRef]
- Hu, J.; He, Y.; Xu, L.; Williams, B.W. Improved control of DFIG systems during network unbalance using PI–R current regulators. IEEE Trans. Ind. Electron. 2008, 56, 439–451. [Google Scholar] [CrossRef]
- Hu, J.; He, Y. DFIG wind generation systems operating with limited converter rating considered under unbalanced network conditions–analysis and control design. Renew. Energy 2011, 36, 829–847. [Google Scholar] [CrossRef]
- Liserre, M.; Teodorescu, R.; Blaabjerg, F. Multiple harmonics control for three-phase grid converter systems with the use of PI-RES current controller in a rotating frame. IEEE Trans. Power Electron. 2006, 21, 836–841. [Google Scholar] [CrossRef]
- Lopez, J.; Sanchis, P.; Roboam, X.; Marroyo, L. Dynamic behavior of the doubly fed induction generator during three-phase voltage dips. IEEE Trans. Energy Convers. 2007, 22, 709–717. [Google Scholar] [CrossRef]
- López, J.; Sanchis, P.; Gubía, E.; Ursúa, A.; Marroyo, L.; Roboam, X. Control of doubly fed induction generator under symmetrical voltage dips. In Proceedings of the 2008 IEEE International Symposium on Industrial Electronics, Cambridge, UK, 30 June–2 July 2008; pp. 2456–2462. [Google Scholar]
- Bollen, M.H. Understanding Power Quality Problems; IEEE Press: Piscataway, NJ, USA, 2000. [Google Scholar]
- Xu, L. Coordinated control of DFIG’s rotor and grid side converters during network unbalance. IEEE Trans. Power Electron. 2008, 23, 1041–1049. [Google Scholar]
- Lopez, J.; Gubia, E.; Sanchis, P.; Roboam, X.; Marroyo, L. Wind turbines based on doubly fed induction generator under asymmetrical voltage dips. IEEE Trans. Energy Convers. 2008, 23, 321–330. [Google Scholar] [CrossRef]
- Infineon Datasheet of Module FF1500R12IE5. Available online: https://www.infineon.com/dgdl/Infineon-FF1500R12IE5-DataSheet-v03_01-EN.pdf?fileId=5546d4625f2e26bc015f2e9197d90007 (accessed on 20 April 2022).
- SEMIKRON Datasheet of Heatsink P16/300. Available online: https://pdf1.alldatasheetpt.com/datasheet-pdf/view/127115/SEMIKRON/P16/300.html (accessed on 20 April 2022).
- Infineon Datasheet of Module FF1500R17IP5P. Available online: https://www.infineon.com/dgdl/Infineon-FF1500R17IP5P-DataSheet-v03_02-EN.pdf?fileId=5546d46264a8de7e0164f4b761db4512 (accessed on 20 April 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| GSC voltage | 380 V |
| Grid frequency | 60 Hz |
| Rated output power | 2.0 MW |
| DC-link voltage | 698 V |
| Switching frequency | 3 kHz |
| Stator voltage | 690 V |
| Stator current | 1414.20 A |
| Stator resistance | 0.002381 Ω |
| Stator leakage inductance | 0.07579 mH |
| Rotor voltage | 1380 V |
| Rotor current | 707.10 A |
| Rotor resistance | 0.002381 Ω |
| Rotor leakage inductance | 0.060481 mH |
| Magnetizing inductance | 0.0023 H |
| Stator/rotor turns ratio | 0.5 |
| Inertia moment | 59.47 kg/m² |
| Friction coefficient | 0.007 N⋅m⋅s |
| Number of pole pairs | 2 |
| Component | Parameter | 1st | 2nd | 3rd | 4th |
|---|---|---|---|---|---|
| IGBT | R (K/kW) | 0.527 | 8.61 | 8.74 | 1.63 |
| τ (s) | 0.0012 | 0.0271 | 0.0739 | 0.967 | |
| Diode | R (K/kW) | 2.72 | 13.4 | 16.5 | 2.35 |
| τ (s) | 0.0012 | 0.0221 | 0.0782 | 1.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Oliveira, I.R.; Tofoli, F.L.; Mendes, V.F. Thermal Analysis of Power Converters for DFIG-Based Wind Energy Conversion Systems during Voltage Sags. Energies 2022, 15, 3152. https://doi.org/10.3390/en15093152
de Oliveira IR, Tofoli FL, Mendes VF. Thermal Analysis of Power Converters for DFIG-Based Wind Energy Conversion Systems during Voltage Sags. Energies. 2022; 15(9):3152. https://doi.org/10.3390/en15093152
Chicago/Turabian Stylede Oliveira, Igor Rodrigues, Fernando Lessa Tofoli, and Victor Flores Mendes. 2022. "Thermal Analysis of Power Converters for DFIG-Based Wind Energy Conversion Systems during Voltage Sags" Energies 15, no. 9: 3152. https://doi.org/10.3390/en15093152
APA Stylede Oliveira, I. R., Tofoli, F. L., & Mendes, V. F. (2022). Thermal Analysis of Power Converters for DFIG-Based Wind Energy Conversion Systems during Voltage Sags. Energies, 15(9), 3152. https://doi.org/10.3390/en15093152