
Unintentional Passive Islanding Detection and Prevention Method with Reduced Non-Detection Zones



Abstract
:1. Introduction
1.1. Literature Review
1.2. Research Gap and Motivation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inference | Islanding Detection Techniques | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Rate of Change of Power (ROCOP) [21] | Rate of Change of Frequency (ROCOF) [22] | Phase Jump Detection (PJD) [23] | Harmonic Distortion [24] | Over-/Under-Voltage and Frequency (OUV/OUF) [25] | Voltage Imbalance [24] | Voltage Variation Method [26] | Frequency Variation Method [26] | Proposed Method | |
| NDZ | smaller than OUV/OUF | smaller than ROCOF | large than ROCOP | smaller than ROCOF | larger than PJD | smaller than voltage variation | larger than harmonic distortion | larger than voltage variation | reduced than other methods |
| Detection time | 24–26 s | 24 s | 10–20 s | 45 s | 4–2 s | 53 s | 1.29 s | 1.95 s | 0.58 s |
| Number of islanded buses | more | more | more | more | more | more | more | more | less |
| Prevention | can prevent with a power control relay | can prevent with the rate of change of the frequency relay | can control with the slip-mode frequency-shift method | can control with a digital relay | can prevent with an under-/over-frequency/voltage relay | voltage relays are used | over-/under-voltage relays are used | rates of change of frequency relays are used | installing a battery or diesel generator prevents islanding |
1.3. Contribution and Organization of the Paper
- An unintentional passive islanding detection method using the V-F index is proposed to detect islanding events.
- With the proposed strategy, the number of buses islanded and time taken for the detection of islanding are minimized when compared to those of the existing methods.
- Section 2 describes the model description of the DGs.
- The detection strategy for the proposed method is described in Section 3.
- The prevention strategy for the proposed method is described in Section 4.
- The results obtained for various bus systems and their discussions are provided in Section 5.
- Finally, in Section 6, the conclusion of this work is described.
2. Model Description
2.1. PV Modeling
2.2. Wind Modeling
2.3. Hydro-Energy Modeling
3. Proposed Passive Method for Islanding Detection
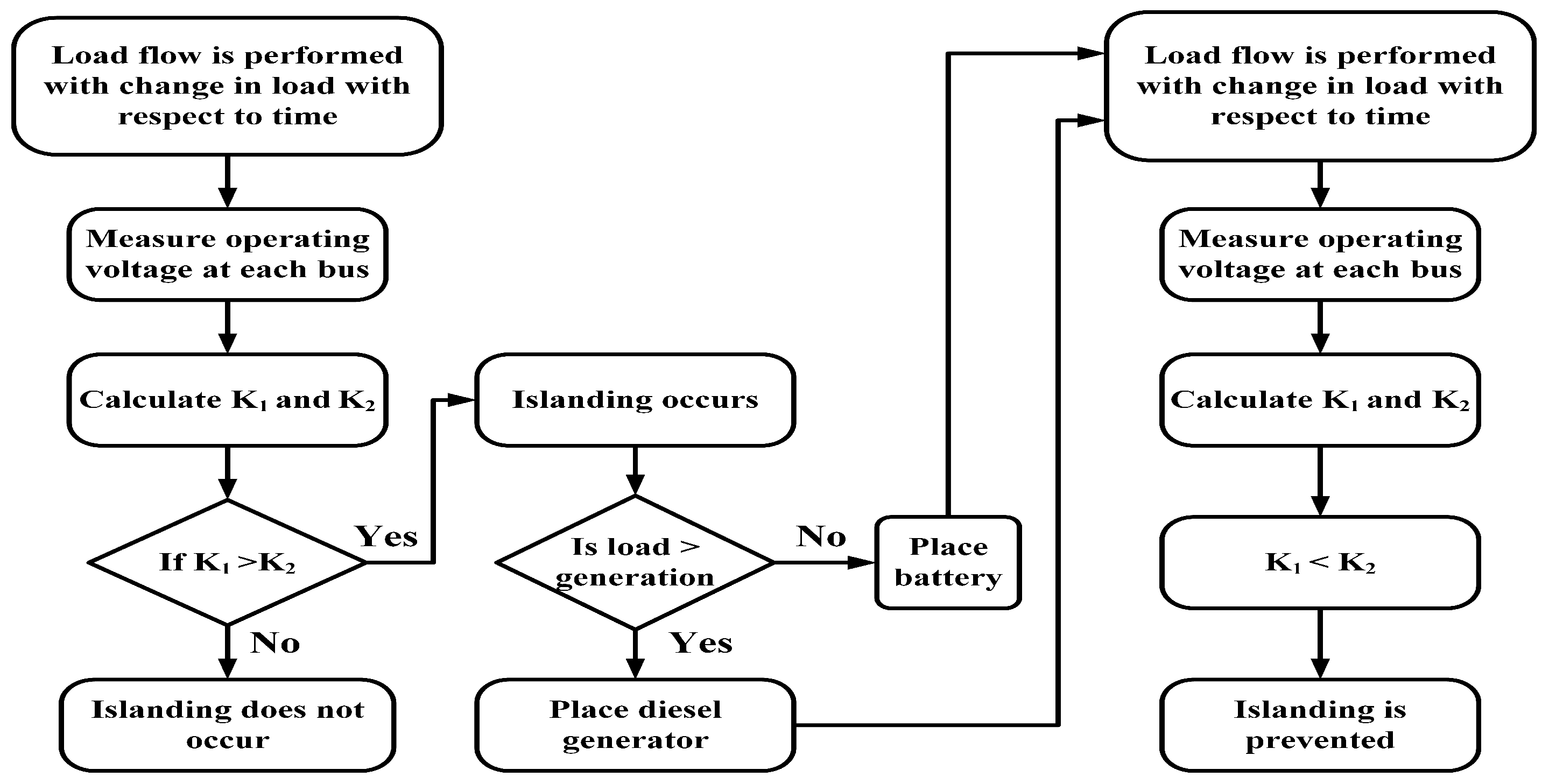
4. Proposed Strategy for Islanding Prevention
- Initially, the load-flow method is carried out. By using Equation (21), the values of and are calculated. When is greater than , islanding occurs; otherwise, islanding does not occur in a particular bus, and the buses in the network are treated as islanded buses when there are changes in the frequency and voltage values with respect to the nominal frequency and voltage.
- After the occurrence of islanding, the condition between the load and generation is checked. If the load is less than the generation, a battery is installed to prevent islanding, and if the generation is less than the load, a diesel generator is installed to prevent islanding.
- Here, the diesel generators are installed as dispatchable DG units in order to support the network in such conditions where non-dispatchable DG units do not provide the power.
- Since a battery is a storage device, it can charge or discharge power, and it cannot generate power by itself. However, a diesel generator can generate power and support the grid as well. Hence, a diesel generator is also used to prevent islanding.
- After the placement, the system is rejoined with the grid, and the islanding detection method is performed as described in Section 3. Now, no buses are islanded due to the power balance, and the result of < is provided.
5. Results and Discussion
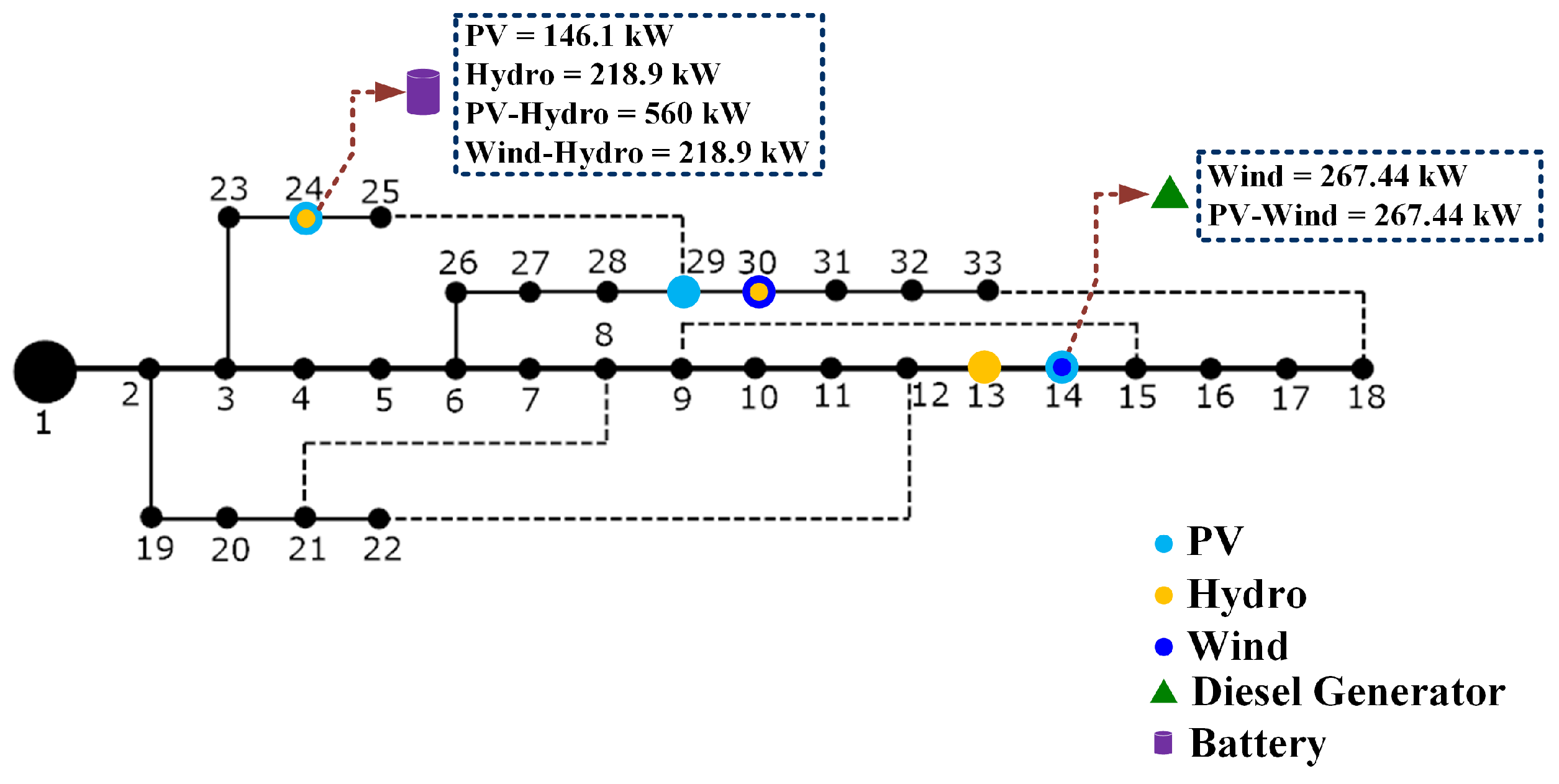
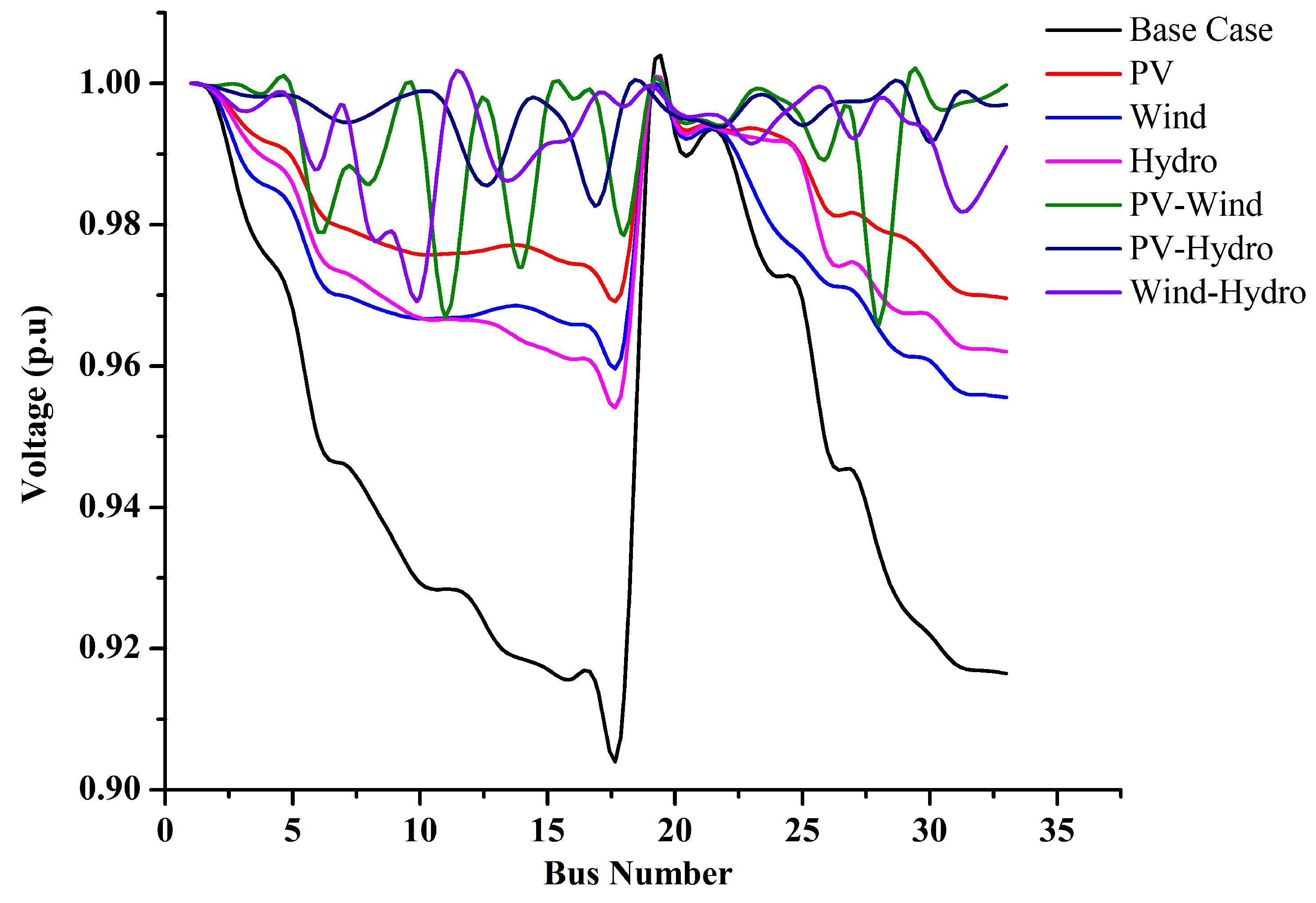
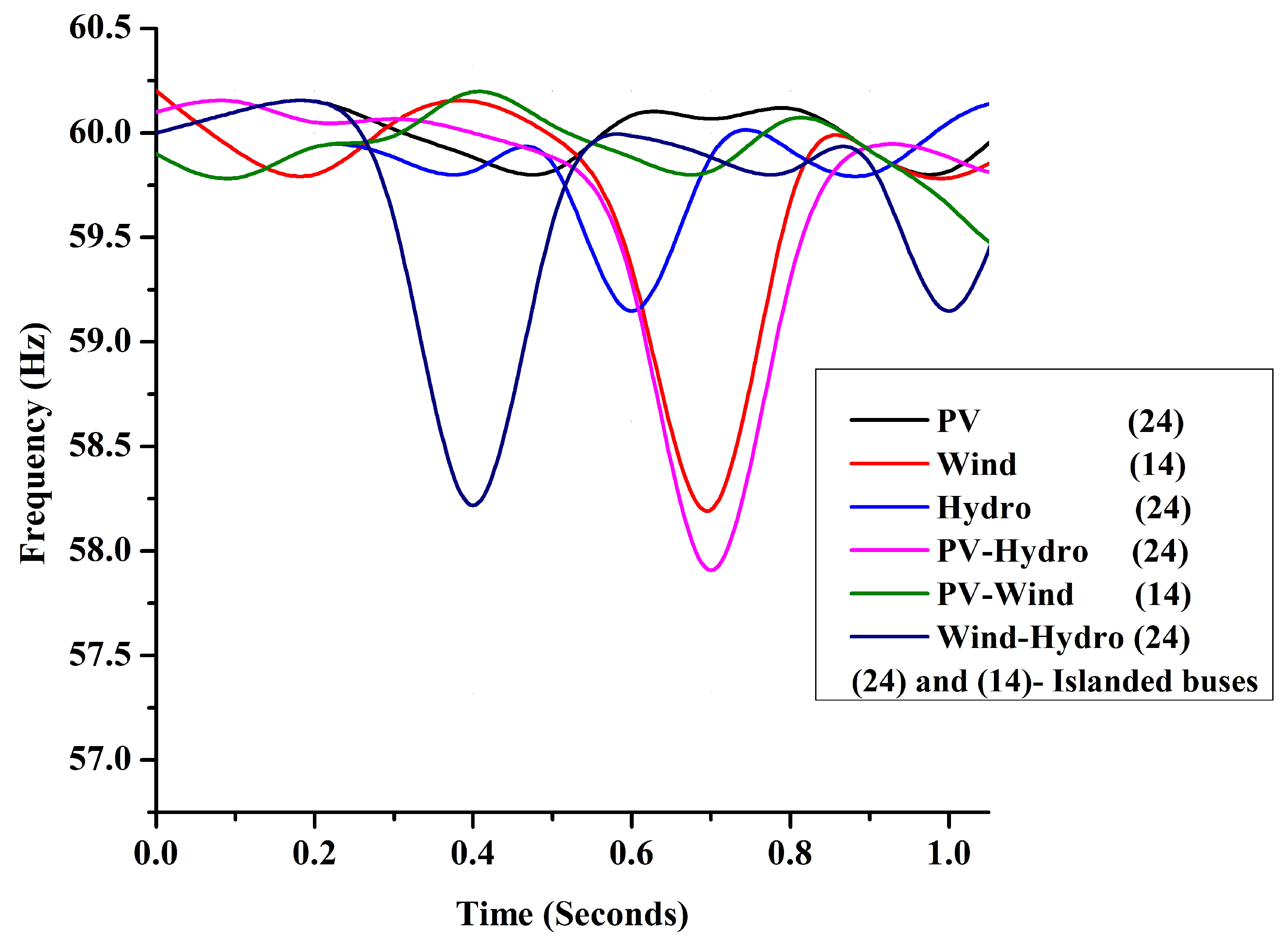
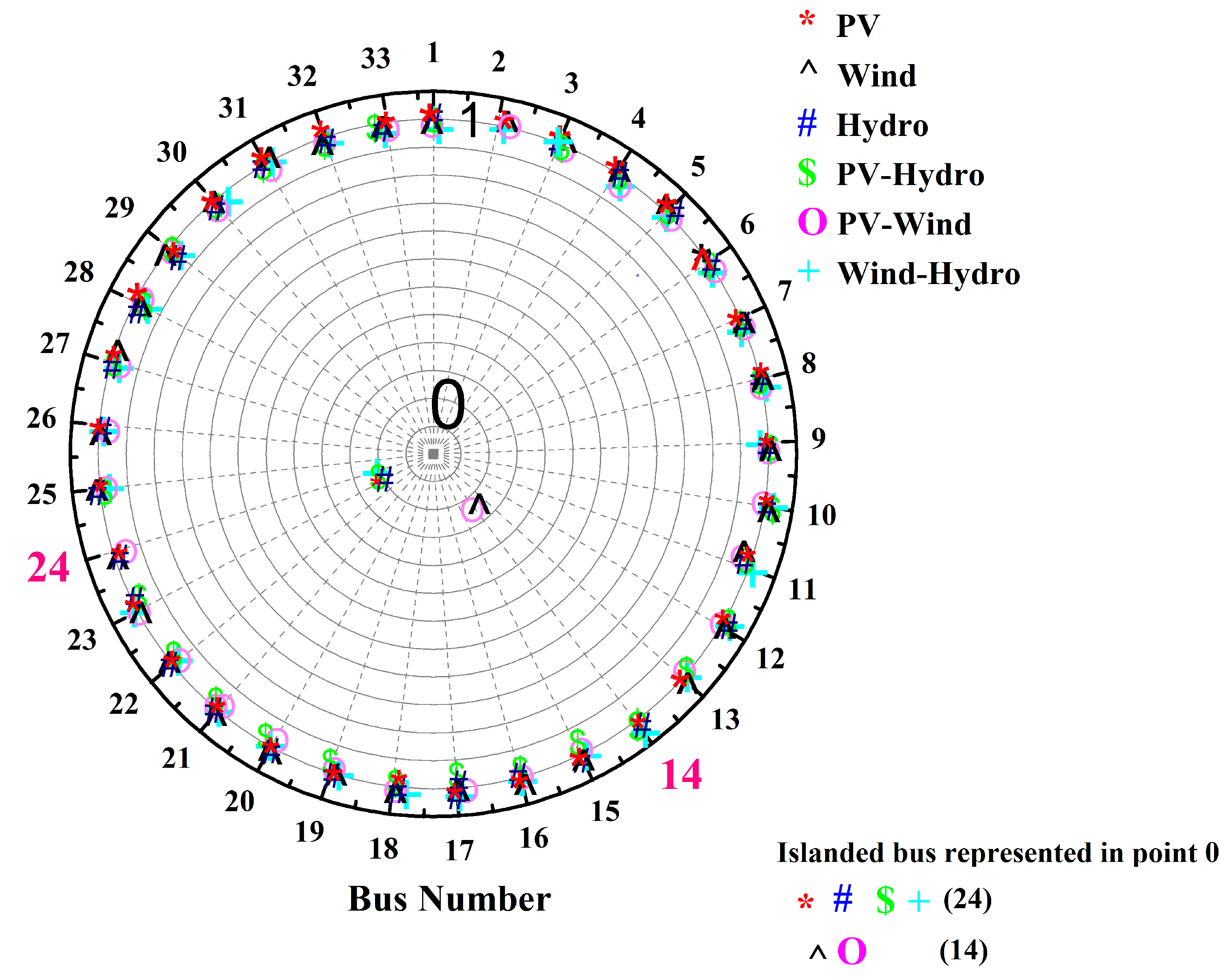
5.1. Islanding Detection and Prevention for the 33-Bus System
Quantitative Analysis of the 33-Bus System
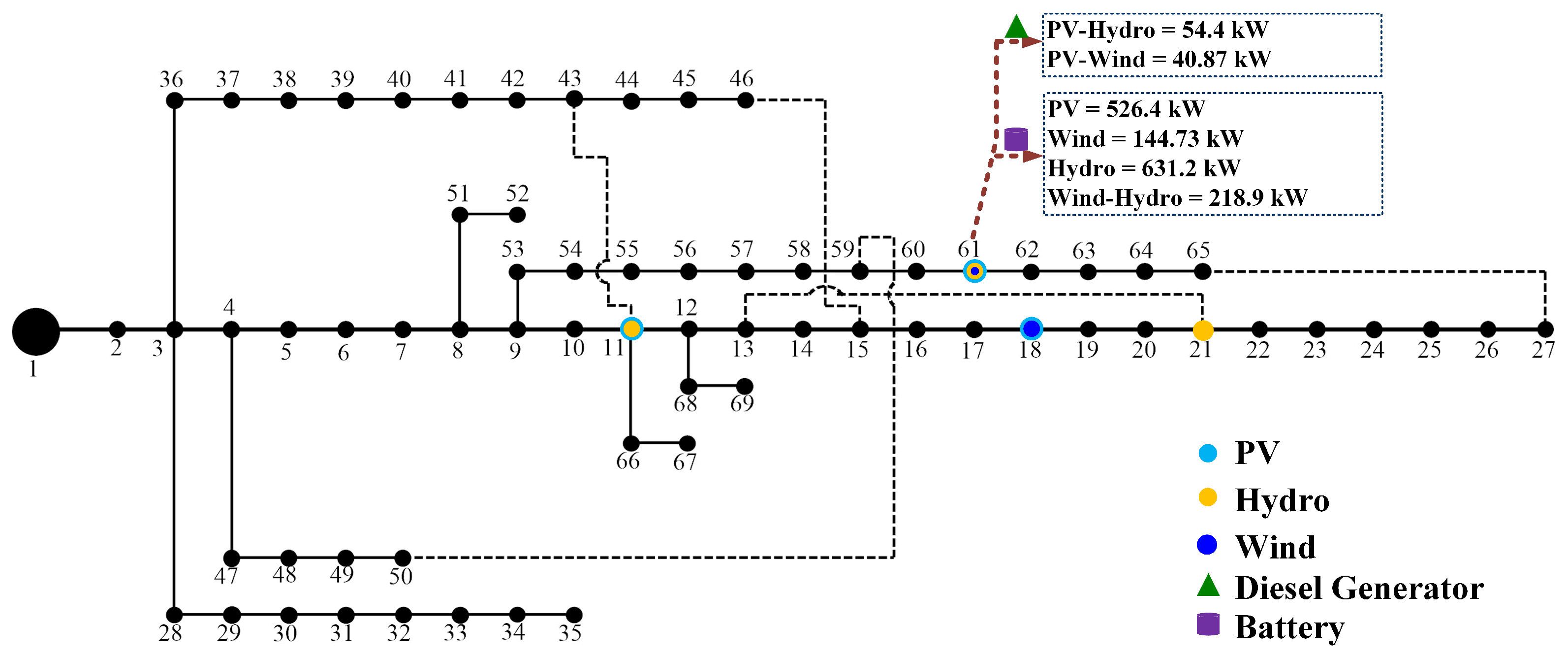
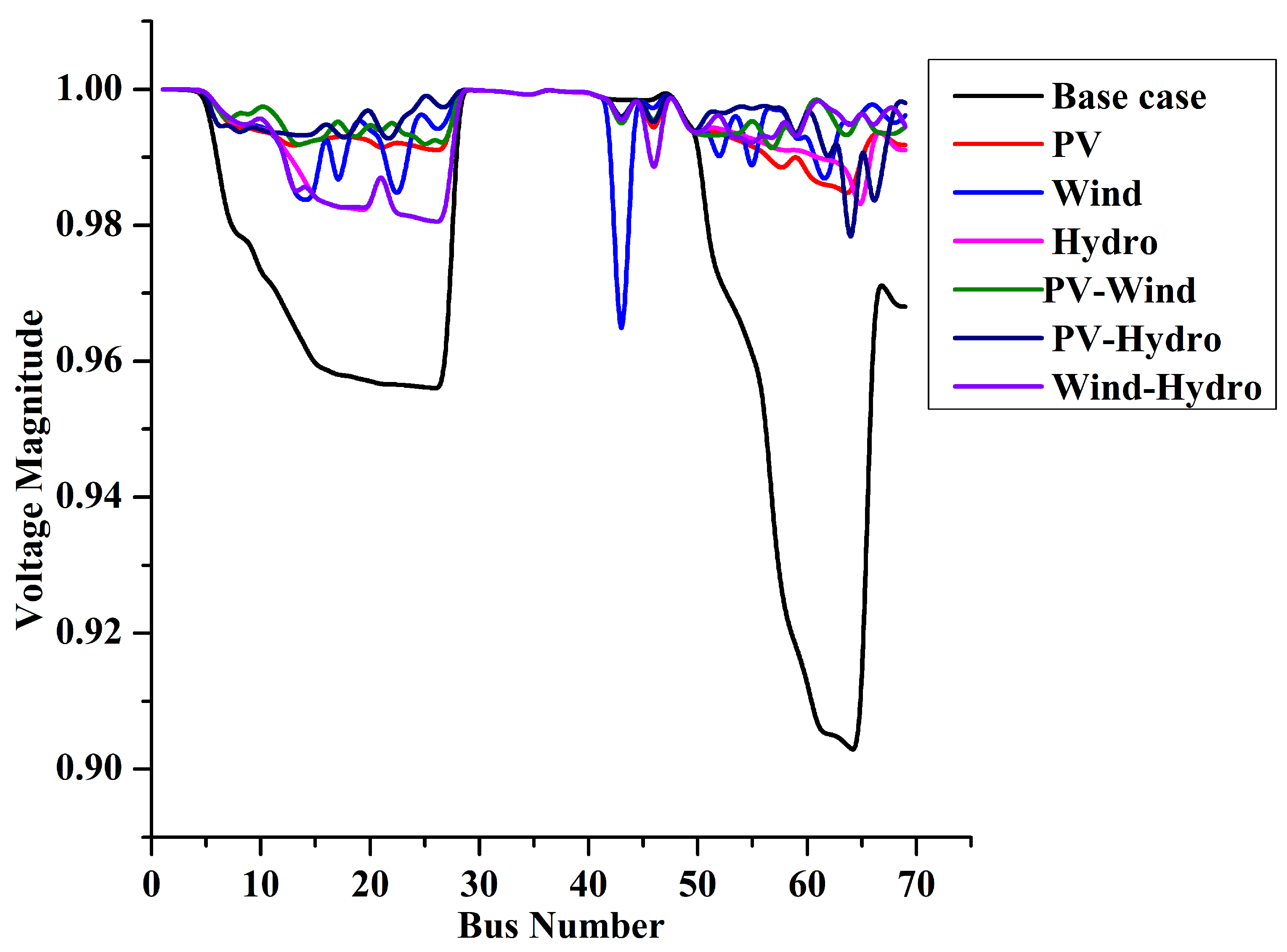
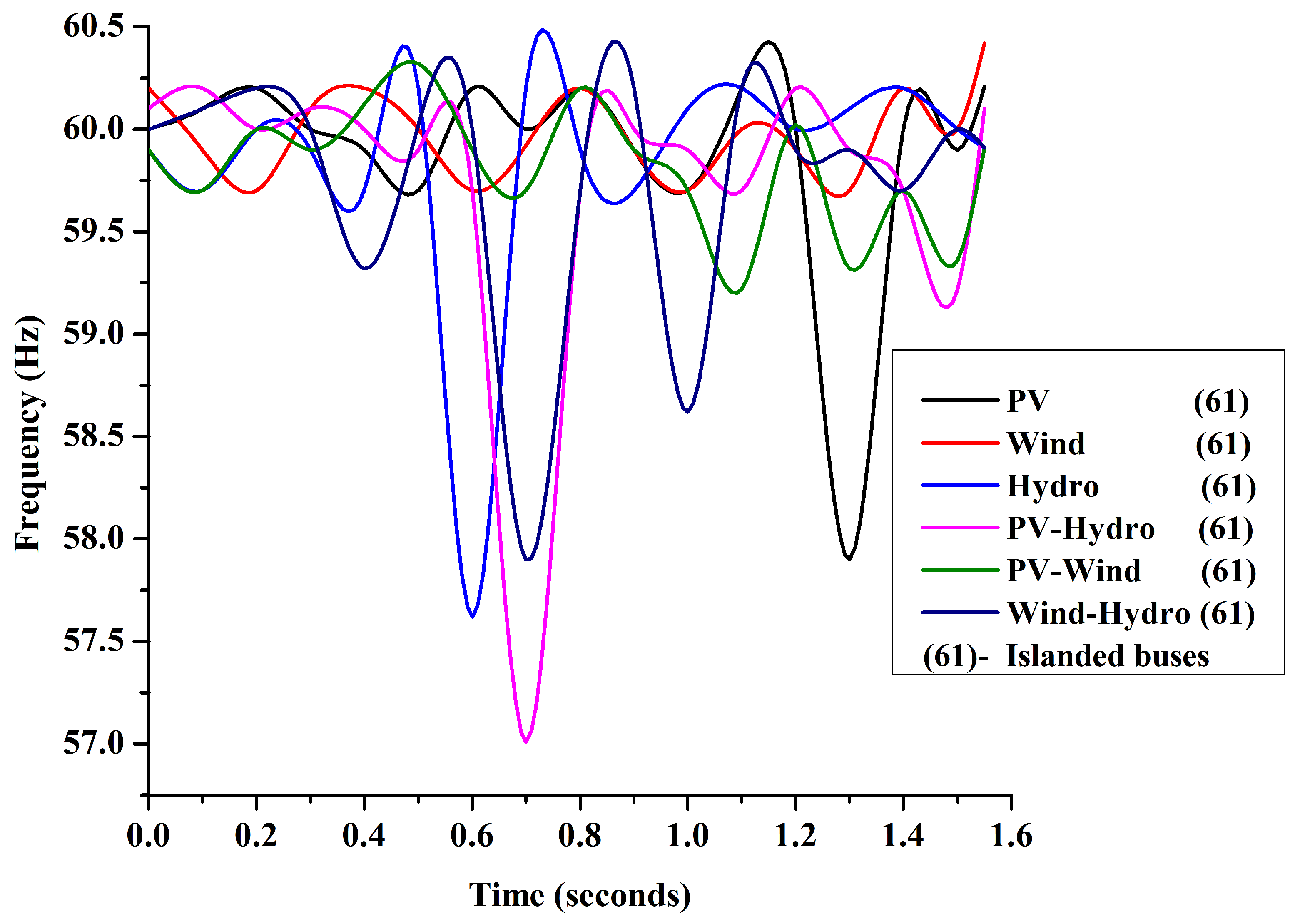
5.2. Islanding Detection and Prevention for the 69-Bus System
Quantitative Analysis of the 69-Bus System
5.3. Islanding Detection and Prevention for the 118-Bus System
Quantitative Analysis of the 118-Bus System
- In the 33-bus system, the vulnerable bus identified was bus 24 because of the value of (V-F index values) was greater than that of (threshold limits) for PV, hydro, and PV–hydro and wind–hydro combinations. With the proposed V-F index method, the detection time for impending islanding was 23.37% faster than that of the voltage variation method and 62.62% faster than that of the frequency variation method in the presence of PV. The proposed method was 30.98% faster than the voltage variation method and 28% faster than the frequency variation method in the presence of hydro. The proposed method was 33.33% faster than the voltage variation method and 31.46% faster than the frequency variation method in the presence of PV–hydro. The proposed method was 90% faster than the voltage variation method and 90.51% faster than the frequency variation method in the presence of wind–hydro. Likewise, bus 14 was the vulnerable bus for wind and the PV–wind combination. With the proposed V-F index method, the detection time for impending islanding was 27.58% faster than that of the voltage variation method and 26.58% faster than that of the frequency variation method in the presence of wind. The proposed method was 6.66% faster than the voltage variation method and 41.09% faster than the frequency variation method in the presence of PV–wind. The generation was greater than the load for PV, hydro, and the PV–hydro and wind–hydro combinations. So, a battery was installed for power balance at the 24th bus. The generation was less than the load for wind and the PV–wind combination. So, a diesel generator was installed for power balance at the 14th bus for wind and the PV–wind combination.
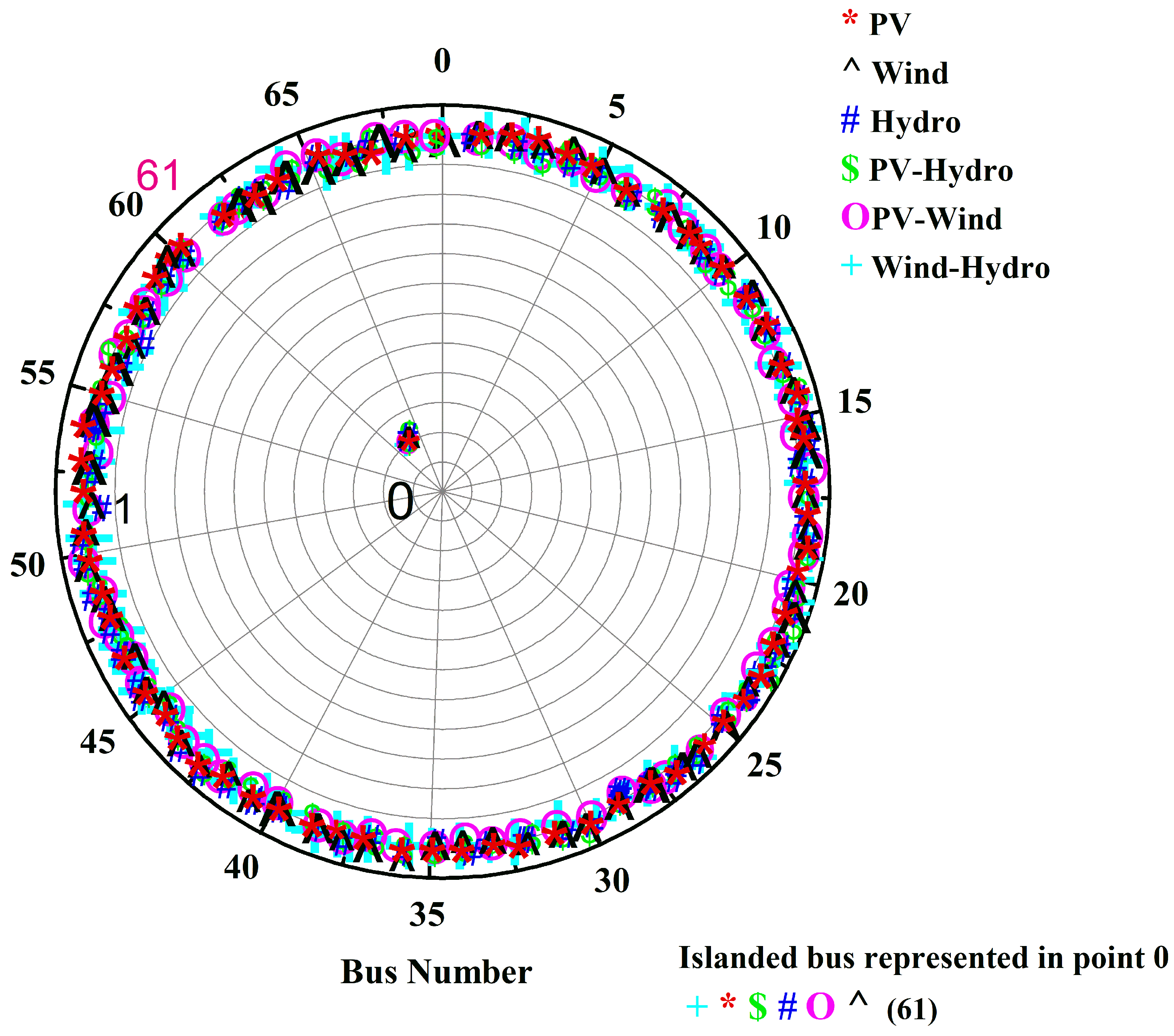
- In the 69-bus system, the vulnerable bus identified was bus 61 because of the value of (V-F index values) was greater than that of (threshold limits) for PV, wind, hydro, PV–hydro, PV–wind, and wind–hydro. With the proposed V-F index method, the detection time for impending islanding was 14.43% faster than that of the voltage variation method and 24.10% faster than that of the frequency variation method in the presence of PV. The proposed method was 21.32% faster than the voltage variation method and 21.32% faster than the frequency variation method in the presence of wind. The proposed method was 95.35% faster than the voltage variation method and 86.23% faster than the frequency variation method in the presence of hydro. The proposed method was 38.50% faster than the voltage variation method and 14.28% faster than the frequency variation method in the presence of PV–hydro. The proposed method was 46.97% faster than the voltage variation method and 14.63% faster than the frequency variation method in the presence of PV–wind. The proposed method was 27.77% faster than the voltage variation method and 10% faster than the frequency variation method in the presence of wind–hydro. The generation was greater than the load for PV, wind, hydro, and the wind–hydro combination. So, a battery was installed for power balance at the 61st bus. The generation was less than the load for PV–hydro and the combination of PV–wind. So, a diesel generator was installed for power balance at the 61st bus for PV–hydro and the combination of PV–wind.
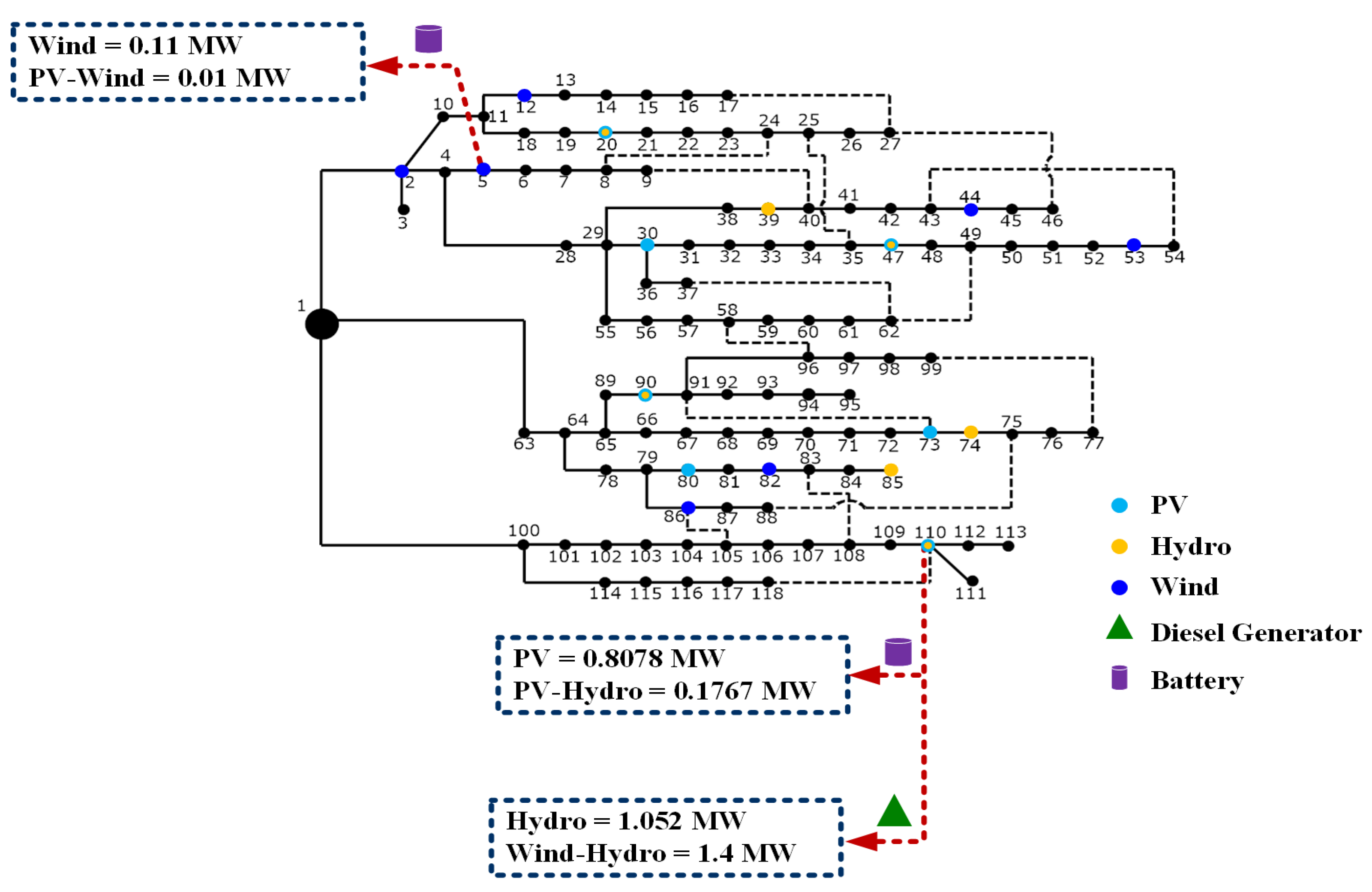
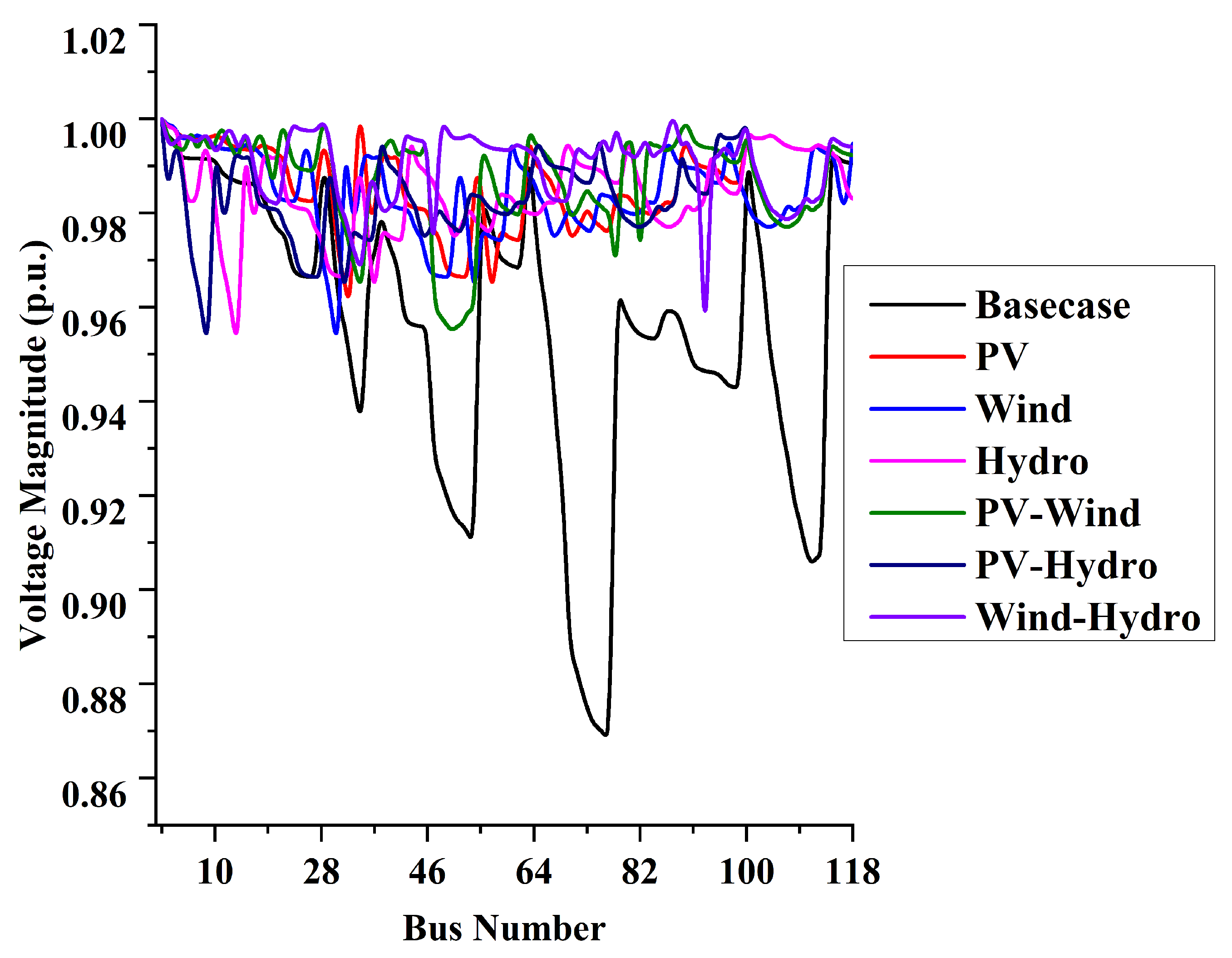
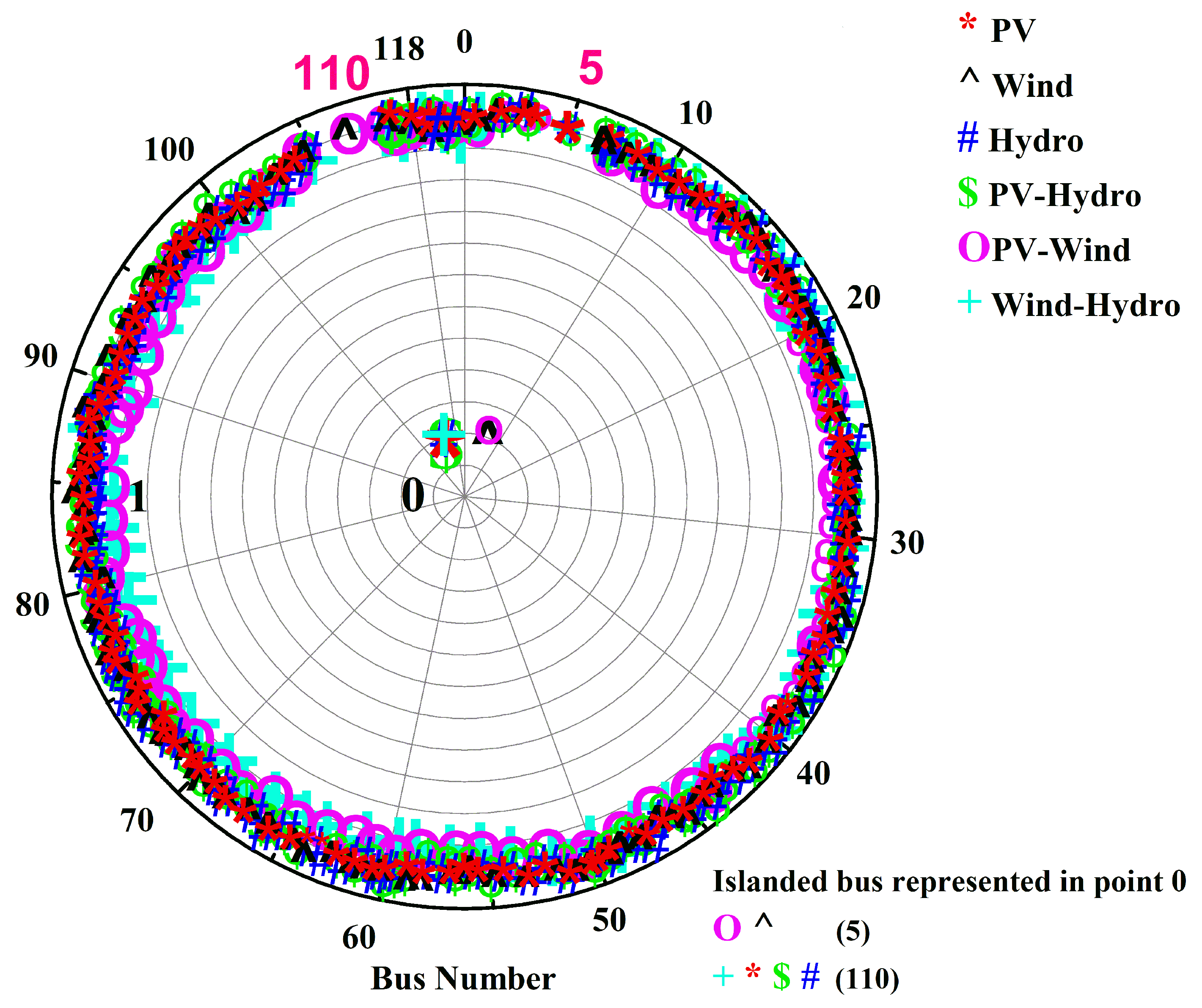
- In the 118-bus system, the vulnerable bus identified was bus 110 because the value of (V-F index values) was greater than that of (threshold limits) for PV, hydro, PV–hydro, and wind–hydro. With the proposed V-F index method, the detection time for impending islanding was 10.60% faster than that of the voltage variation method and 23.94% faster than that of the frequency variation method in the presence of PV. The proposed method was 3.27% faster than the voltage variation method and 3.27% faster than the frequency variation method in the presence of hydro. The proposed method was 7% faster than the voltage variation method and 10.58% faster than the frequency variation method in the presence of PV–hydro. The proposed method was 72.67% faster than the voltage variation method and 6.2% faster than the frequency variation method in the presence of wind–hydro. Likewise, bus 5 was the vulnerable bus for wind and the PV–wind combination. With the proposed V-F index method, the detection time for impending islanding was 27.58% faster than that of the voltage variation method and 1.52% faster than that of the frequency variation method in the presence of wind. The proposed method was 7% faster than the voltage variation method and 30.76% faster than the frequency variation method in the presence of PV–wind. The generation was greater than the load for PV, wind, PV–hydro, and PV–wind. So, a battery was installed for power balance at the 110th bus for PV and the combination of PV–hydro, as well as at the fifth bus for wind and the combination of PV–wind. For hydro and the combination of wind–hydro, the generation was less than the load. So, a diesel generator was installed for power balance at the 110th bus for hydro and the combination of wind–hydro.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Selim, A.; Kamel, S.; Mohamed, A.A.; Elattar, E.E. Optimal Allocation of Multiple Types of Distributed Generations in Radial Distribution Systems Using a Hybrid Technique. Sustainability 2021, 13, 6644. [Google Scholar] [CrossRef]
- Ji, X.; Zhang, X.; Zhang, Y.; Yin, Z.; Yang, M.; Han, X. Three-Phase Symmetric Distribution Network Fast Dynamic Reconfiguration Based on Timing-Constrained Hierarchical Clustering Algorithm. Symmetry 2021, 13, 1479. [Google Scholar] [CrossRef]
- Shahid, M.U.; Alquthami, T.; Siddique, A.; Munir, H.M.; Abbas, S.; Abbas, Z. RES Based Islanded DC Microgrid with Enhanced Electrical Network Islanding Detection. Energies 2021, 14, 8432. [Google Scholar] [CrossRef]
- Cebollero, J.A.; Cañete, D.; Martín-Arroyo, S.; García-Gracia, M.; Leite, H. A Survey of Islanding Detection Methods for Microgrids and Assessment of Non-Detection Zones in Comparison with Grid Codes. Energies 2022, 15, 460. [Google Scholar] [CrossRef]
- Abokhalil, A.G.; Awan, A.B.; Al-Qawasmi, A.R. Comparative Study of Passive and Active Islanding Detection Methods for PV Grid-Connected Systems. Sustainability 2018, 10, 1798. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, A.A.; Kamel, S.; Selim, A.; Khurshaid, T.; Rhee, S.B. Developing a Hybrid Approach Based on Analytical and Metaheuristic Optimization Algorithms for the Optimization of Renewable DG Allocation Considering Various Types of Loads. Sustainability 2021, 13, 4447. [Google Scholar] [CrossRef]
- Lopez, J.R.; Ibarra, L.; Ponce, P.; Molina, A. A Decentralized Passive Islanding Detection Method Based on the Variations of Estimated Droop Characteristics. Energies 2021, 14, 7759. [Google Scholar] [CrossRef]
- Bukhari, S.B.A.; Mehmood, K.K.; Wadood, A.; Park, H. Intelligent Islanding Detection of Microgrids Using Long Short-Term Memory Networks. Energies 2021, 14, 5762. [Google Scholar] [CrossRef]
- Montoya, O.D.; Arias-Londoño, A.; Grisales-Noreña, L.F.; Barrios, J.Á.; Chamorro, H.R. Optimal Demand Reconfiguration in Three-Phase Distribution Grids Using an MI-Convex Model. Symmetry 2021, 13, 1124. [Google Scholar] [CrossRef]
- Bakhshi-Jafarabadi, R.; Sadeh, J.; Rakhshani, E.; Popov, M. High power quality maximum power point tracking-based islanding detection method for grid-connected photovoltaic systems. Int. J. Electr. Power Energy Syst. 2021, 131, 107103. [Google Scholar] [CrossRef]
- Hashemi, F.; Ghadimi, N.; Sobhani, B. Islanding detection for inverter-based DG coupled with using an adaptive neuro-fuzzy inference system. Int. J. Electr. Power Energy Syst. 2013, 45, 443–455. [Google Scholar] [CrossRef]
- Ray, P.K.; Mohanty, S.R.; Kishor, N. Disturbance detection in grid-connected distributed generation system using wavelet and S-transform. Electr. Power Syst. Res. 2011, 81, 805–819. [Google Scholar] [CrossRef]
- Abd-Elkader, A.G.; Saleh, S.M.; Eiteba, M.B.M. A passive islanding detection strategy for multi-distributed generations. Int. J. Electr. Power Energy Syst. 2018, 99, 146–155. [Google Scholar] [CrossRef]
- Liu, S.; Ji, F.; Li, Y.; Xiang, J. Islanding detection method based on system identification. IET Power Electron. 2016, 9, 2095–2102. [Google Scholar] [CrossRef]
- Ahmadzadeh-Shooshtari, B.; Hamedani Golshan, M.E.; Sadeghkhani, I. A combined method to efficiently adjust frequency-based anti-islanding relays of synchronous distributed generation. Int. Trans. Electr. Energy Syst. 2015, 25, 3042–3059. [Google Scholar] [CrossRef]
- Zamani, M.A.; Sidhu, T.S.; Yazdani, A. A Protection Strategy and Microprocessor-Based Relay for Low-Voltage Microgrids. IEEE Trans. Power Deliv. 2011, 26, 1873–1883. [Google Scholar] [CrossRef]
- Ustun, T.S.; Ozansoy, C.; Zayegh, A. Modeling of a Centralized Microgrid Protection System and Distributed Energy Resources According to IEC 61850-7-420. Power Syst. IEEE Trans. 2012, 27, 1560–1567. [Google Scholar] [CrossRef]
- Sebastián, R. Battery energy storage for increasing stability and reliability of an isolated Wind Diesel power system. IET Renew. Power Gener. 2017, 11, 296–303. [Google Scholar] [CrossRef]
- Abd-Elkader, A.G.; Saleh, S.M. Zero non-detection zone assessment for anti-islanding protection in rotating machines based distributed generation system. Int. J. Energy Res. 2021, 45, 521–540. [Google Scholar] [CrossRef]
- Jabari, F.; Sohrabi, F.; Pourghasem, P.; Mohammadi-Ivatloo, B. Backward-forward sweep based power flow algorithm in distribution systems. In Optimization of Power System Problems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 365–382. [Google Scholar]
- Redfern, M.; Usta, O.; Fielding, G. Protection against loss of utility grid supply for a dispersed storage and generation unit. IEEE Trans. Power Deliv. 1993, 8, 948–954. [Google Scholar] [CrossRef]
- Freitas, W.; Xu, W.; Affonso, C.M.; Huang, Z. Comparative analysis between ROCOF and vector surge relays for distributed generation applications. IEEE Trans. Power Deliv. 2005, 20, 1315–1324. [Google Scholar] [CrossRef]
- IEA-PVPS. Evaluation of Islanding Detection Methods for Photovoltaic Utility-Interactive Power Systems; Report IEA PVPS T5-09; IEA-PVPS: Paris, France, 2002. [Google Scholar]
- Jang, S.I.; Kim, K.H. An islanding detection method for distributed generations using voltage unbalance and total harmonic distortion of current. IEEE Trans. Power Deliv. 2004, 19, 745–752. [Google Scholar] [CrossRef]
- De Mango, F.; Liserre, M.; Dell’Aquila, A. Overview of anti-islanding algorithms for pv systems. Part ii: Activemethods. In Proceedings of the 2006 12th International Power Electronics and Motion Control Conference, Portorož, Slovenia, 30 August–1 September 2006; pp. 1884–1889. [Google Scholar]
- Ramachandradurai, S.; Krishnan, N. Islanding-based reliability enhancement and power loss minimization by network reconfiguration using PSO with multiple DGs. Int. Trans. Electr. Energy Syst. 2021, 31, e12987. [Google Scholar] [CrossRef]
- Pottukkannan, B.; Suvarchala, K.; Muthukannan, P.; Thangaraj, Y. Optimal Allocation of Renewable Distributed Generation in Radial Distribution Network. J. Adv. Res. Dyn. Control Syst. 2018, 10, 11. [Google Scholar]
- Fang, X.; Li, F.; Wei, Y.; Azim, R.; Xu, Y. Reactive power planning under high penetration of wind energy using Benders decomposition. IET Gener. Transm. Distrib. 2015, 9, 1835–1844. [Google Scholar] [CrossRef]
- Sahu, B.K. A study on global solar PV energy developments and policies with special focus on the top ten solar PV power producing countries. Renew. Sustain. Energy Rev. 2015, 43, 621–634. [Google Scholar] [CrossRef]
- Toledo, O.M.; Oliveira Filho, D.; Diniz, A.S.A.C. Distributed photovoltaic generation and energy storage systems: A review. Renew. Sustain. Energy Rev. 2010, 14, 506–511. [Google Scholar] [CrossRef]
- Soroudi, A.; Aien, M.; Ehsan, M. A probabilistic modeling of photo voltaic modules and wind power generation impact on distribution networks. IEEE Syst. J. 2011, 6, 254–259. [Google Scholar] [CrossRef] [Green Version]
- Bhandari, B.; Poudel, S.R.; Lee, K.T.; Ahn, S.H. Mathematical modeling of hybrid renewable energy system: A review on small hydro-solar-wind power generation. Int. J. Precis. Eng. Manuf. Green Technol. 2014, 1, 157–173. [Google Scholar] [CrossRef]
- Narayanan, K.; Siddiqui, S.A.; Fozdar, M. Hybrid islanding detection method and priority-based load shedding for distribution networks in the presence of DG units. IET Gener. Transm. Distrib. 2017, 11, 586–595. [Google Scholar]
- Mathworks. MATLAB. 2019. Available online: https://ww2.mathworks.cn/en/products/new_products/release2019a.html (accessed on 1 March 2022).
- Prakash, D.B.; Lakshminarayana, C. Multiple DG placements in distribution system for power loss reduction using PSO Algorithm. Procedia Technol. 2016, 25, 785–792. [Google Scholar] [CrossRef] [Green Version]
- Jamil Mahfoud, R.; Sun, Y.; Faisal Alkayem, N.; Haes Alhelou, H.; Siano, P.; Shafie-khah, M. A novel combined evolutionary algorithm for optimal planning of distributed generators in radial distribution systems. Appl. Sci. 2019, 9, 3394. [Google Scholar] [CrossRef] [Green Version]

| Variables | Ratings (Bus System) | ||
|---|---|---|---|
| 33 | 69 | 118 | |
| —V-F index and —threshold limits represented in Equation (21) | 0.09684 and 0.10504 | 0.09884 and 0.1504 | 0.099924 and 0.2432 |
| and —The phase voltage related to the time, frequency, and voltage represented in Equations (13) and (14) | 1.5925 and 1.226 | 1.7925 and 1.326 | 1.6251 and 0.2432 |
| —The real power value of one bus with respect to the next bus used in Equation (19) | 7.2 kW | 8.7 kW | 9.3 kW |
| —The actual load used in Equation (19) | 20 kW | 22 kW | 23 kW |
| —The number of samples used in Equations (13) and (14) | 3353 | 3353 | 3353 |
| —The new operating voltage calculated using Equation (15) | 11.66 kV | 12.1 kV | 9.2 kV |
| —The system operating voltage used in Equation (19) | 0.995 kV | 0.998 kV | 0.996 kV |
| —The base voltage used in Equations (15), (16), (19), and (21) | 12.66 kV | 12.66 kV | 11 kV |
| —The violated frequency represented in Equation (17) | 0.36 Hz | 0.38 Hz | 0.39 Hz |
| —The change in voltage represented in Equation (16) | 1.226 kV | 1.226 kV | 1.120 kV |
| —The determined frequency represented in Equation (19) | 59.64 Hz | 59.65 Hz | 59.61 Hz |
| Type of DG | DG Buses | Novel Passive Islanding Detection | Islanding Prevention at the Identified Bus for the Proposed V-F Index Method | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Voltage Variation [33] | Frequency Variation [13] | Proposed V-F Index Method | Diesel Generator (kW) | Battery (kW) | |||||
| Islanded Buses | Detection Time [s] | Islanded Buses | Detection Time [s] | Islanded Bus | Detection Time [s] | ||||
| PV | 14, 24, 29 | 24, 29 | 1.29 | 14, 24, 29 | 1.95 | 24 | 1.02 | - | 146.1 |
| Wind | 14, 30 | 14, 30 | 0.99 | 14, 30 | 0.98 | 14 | 0.75 | 267.44 | - |
| Hydro | 13, 24, 30 | 13, 30 | 0.82 | 24, 30 | 0.65 | 24 | 0.60 | - | 218.9 |
| PV–Hydro | 13, 14, 24, 29, 30 | 14, 24, 30 | 1.054 | 13, 29 | 1.032 | 24 | 0.75 | - | 560 |
| PV–Wind | 14, 24, 29, 30 | 14, 24, 30 | 0.62 | 14, 30 | 0.88 | 14 | 0.58 | 267.44 | - |
| Wind–Hydro | 31, 14, 24, 30 | 14, 24, 30 | 1.98 | 14, 30 | 1.99 | 24 | 0.75 | - | 218.9 |
| Cases | Voltage Variation [33] | Frequency Variation [13] | Proposed V-F Index Method | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ENS | AENS | SAIDI | SAIFI | ASAI | ENS | AENS | SAIDI | SAIFI | ASAI | ENS | AENS | SAIDI | SAIFI | ASAI | |
| PV | 29,701.11 | 671.10 | 0.37 | 3.95 | 1.99 | 30,211.1 | 669.02 | 0.39 | 3.66 | 1.72 | 16,710.1 | 357.11 | 0.25 | 0.27 | 1.51 |
| Wind | 28,522.03 | 662.12 | 0.34 | 3.72 | 1.83 | 27,101.2 | 621.01 | 0.35 | 3.52 | 1.69 | 15,021.3 | 351.15 | 0.21 | 0.24 | 1.45 |
| Hydro | 26,210.01 | 572.10 | 0.31 | 2.57 | 1.79 | 26,101.2 | 602.1 | 0.32 | 3.37 | 1.63 | 13,101.6 | 272.16 | 0.19 | 0.21 | 1.32 |
| PV–Hydro | 24,311.11 | 525.12 | 0.29 | 2.42 | 1.71 | 24,001.7 | 597.4 | 0.29 | 3.02 | 1.58 | 9347.02 | 202.10 | 0.15 | 0.19 | 1.29 |
| PV–Wind | 21,010.12 | 511.03 | 0.25 | 2.25 | 1.45 | 21,295.2 | 531.8 | 0.25 | 2.92 | 1.52 | 7142.07 | 189.02 | 0.12 | 0.13 | 1.21 |
| Wind–Hydro | 17,821.51 | 502.12 | 0.21 | 1.99 | 1.41 | 15,150.5 | 521.9 | 0.19 | 2.82 | 1.47 | 5215.01 | 169.70 | 0.09 | 0.08 | 1.16 |
| Type of DG | DG Buses | Novel Passive Islanding Detection | Islanding Prevention at the Identified Bus for the Proposed V-F Index Method | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Voltage Variation [33] | Frequency variation [13] | Proposed V-F Index Method | Diesel Generator (kW) | Battery (kW) | |||||
| Islanded Buses | Detection Time [s] | Islanded Buses | Detection Time [s] | Islanded Bus | Detection Time [s] | ||||
| PV | 11, 18, 61 | 11, 61 | 1.56 | 18, 61 | 1.72 | 61 | 1.35 | - | 526.4 |
| Wind | 18, 61 | 18, 61 | 1.92 | 18, 61 | 1.92 | 61 | 1.55 | - | 144.73 |
| Hydro | 11, 21, 61 | 21, 61 | 1.75 | 11, 61 | 1.56 | 61 | 0.62 | - | 631.2 |
| PV–Hydro | 11, 18, 21, 61 | 18, 61 | 0.96 | 21, 61 | 0.75 | 61 | 0.65 | 54.4 | - |
| PV–Wind | 11, 18, 61 | 11, 61 | 0.92 | 11, 61 | 0.66 | 61 | 0.57 | 40.87 | - |
| Wind–Hydro | 11, 18, 21, 61 | 18, 61 | 0.75 | 21, 61 | 0.63 | 61 | 0.57 | - | 218.9 |
| Cases | Voltage Variation [33] | Frequency Variation [13] | Proposed V-F Index Method | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ENS | AENS | SAIDI | SAIFI | ASAI | ENS | AENS | SAIDI | SAIFI | ASAI | ENS | AENS | SAIDI | SAIFI | ASAI | |
| PV | 28,741.9 | 597.36 | 0.35 | 3.42 | 1.72 | 27,881.3 | 599.5 | 0.27 | 3.35 | 1.84 | 16,757.14 | 249.64 | 0.20 | 0.16 | 1.35 |
| Wind | 27,422.03 | 594.33 | 0.32 | 3.39 | 1.70 | 26,122.3 | 596.3 | 0.25 | 3.29 | 1.75 | 16,527.3 | 225.97 | 0.15 | 0.13 | 1.32 |
| Hydro | 26,122.13 | 570.21 | 0.31 | 2.57 | 1.68 | 24,325.1 | 570.3 | 0.22 | 2.99 | 1.71 | 7002.11 | 200.677 | 0.12 | 0.11 | 1.27 |
| PV–Hydro | 24,012.01 | 555.01 | 0.29 | 2.46 | 1.65 | 23,210.1 | 477.2 | 0.20 | 2.95 | 1.67 | 6950.21 | 179.544 | 0.10 | 0.07 | 1.24 |
| PV–Wind | 20,911.10 | 549.01 | 0.25 | 2.32 | 1.59 | 20,195.2 | 460.2 | 0.17 | 2.75 | 1.62 | 4709.12 | 168.422 | 0.07 | 0.05 | 1.14 |
| Wind–Hydro | 19,810.51 | 519.23 | 0.21 | 1.97 | 1.55 | 20,050.5 | 435.2 | 0.15 | 2.32 | 1.45 | 3790.02 | 150.011 | 0.05 | 0.02 | 1.12 |
| Type of DG | DG Buses | Novel Passive Islanding Detection | Islanding Prevention at the Identified Bus for the Proposed V-F Index Method | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Voltage Variation [33] | Frequency Variation [13] | Proposed V-F Index Method | Diesel Generator (kW) | Battery (kW) | |||||
| Islanded Buses | Detection Time [s] | Islanded Buses | Detection Time [s] | Islanded Bus | Detection Time [s] | ||||
| PV | 20, 39, 47, 73, 80, 90, 110 | 47, 80 | 1.39 | 80, 110 | 1.59 | 110 | 1.25 | - | 0.8078 |
| Wind | 5, 82, 86 | 5, 82, 86 | 1.75 | 5, 86 | 1.32 | 5 | 1.30 | - | 0.11 |
| Hydro | 39, 47, 110 | 39, 47, 110 | 1.55 | 39, 110 | 1.55 | 110 | 1.50 | 1.052 | - |
| PV–Hydro | 20, 80, 90, 110 | 80, 110 | 1.92 | 80, 110 | 1.99 | 110 | 1.79 | - | 0.1767 |
| PV–Wind | 5, 39, 44, 47, 82 | 5, 39, 82 | 0.59 | 5, 82 | 0.75 | 5 | 0.55 | - | 0.01 |
| Wind–Hydro | 74, 82, 86, 110 | 86, 110 | 1.99 | 86, 110 | 0.99 | 110 | 0.93 | 1.4 | - |
| Cases | Voltage Variation [33] | Frequency Variation [13] | Proposed V-F Index Method | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ENS | AENS | SAIDI | SAIFI | ASAI | ENS | AENS | SAIDI | SAIFI | ASAI | ENS | AENS | SAIDI | SAIFI | ASAI | |
| PV | 30,541.03 | 695.21 | 0.39 | 3.57 | 1.97 | 28,881.3 | 670.32 | 0.31 | 3.47 | 1.89 | 19,957.14 | 269.52 | 0.23 | 0.19 | 1.35 |
| Wind | 29,422.03 | 624.33 | 0.35 | 3.49 | 1.70 | 27,122.3 | 656.3 | 0.29 | 3.37 | 1.85 | 17,527.3 | 245.97 | 0.21 | 0.15 | 1.33 |
| Hydro | 26,122.13 | 590.21 | 0.32 | 2.27 | 1.68 | 26,325.1 | 590.3 | 0.26 | 3.31 | 1.80 | 8952.11 | 230.677 | 0.20 | 0.13 | 1.29 |
| PV–Hydro | 25,312.01 | 575.01 | 0.30 | 2.21 | 1.65 | 25,210.1 | 577.2 | 0.23 | 2.99 | 1.75 | 6545.21 | 189.544 | 0.17 | 0.10 | 1.25 |
| PV–Wind | 20,911.10 | 569.01 | 0.29 | 2.19 | 1.59 | 21,195.2 | 540.2 | 0.22 | 2.87 | 1.72 | 5950.12 | 178.422 | 0.12 | 0.07 | 1.19 |
| Wind–Hydro | 17,810.51 | 549.23 | 0.25 | 1.99 | 1.55 | 20,150.5 | 495.2 | 0.19 | 2.52 | 1.50 | 4990.02 | 155.011 | 0.09 | 0.04 | 1.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramachandradurai, S.; Krishnan, N.; Prabaharan, N. Unintentional Passive Islanding Detection and Prevention Method with Reduced Non-Detection Zones. Energies 2022, 15, 3038. https://doi.org/10.3390/en15093038
Ramachandradurai S, Krishnan N, Prabaharan N. Unintentional Passive Islanding Detection and Prevention Method with Reduced Non-Detection Zones. Energies. 2022; 15(9):3038. https://doi.org/10.3390/en15093038
Chicago/Turabian StyleRamachandradurai, Sowmya, Narayanan Krishnan, and Natarajan Prabaharan. 2022. "Unintentional Passive Islanding Detection and Prevention Method with Reduced Non-Detection Zones" Energies 15, no. 9: 3038. https://doi.org/10.3390/en15093038
APA StyleRamachandradurai, S., Krishnan, N., & Prabaharan, N. (2022). Unintentional Passive Islanding Detection and Prevention Method with Reduced Non-Detection Zones. Energies, 15(9), 3038. https://doi.org/10.3390/en15093038