
Design Method for Variable Frequency Brushless Synchronous Generators


Abstract
:1. Introduction
2. Influence of the Operating Conditions
- (a)
- The armature winding temperature rise leads to an increase in voltage drop, resulting in more excitation power requirements.
- (b)
- The winding temperature rise leads to higher winding resistance, increased copper losses and lower efficiency.
- (c)
- The resistance of dumping windings becomes larger, the negative sequence impedance increases and the generator performances under unbalanced loads become poorer.
- (d)
- The rotating rectifier operating mode is affected by the winding temperature.
- (e)
- The performance of permanent magnets in PMG decreases and the risk of demagnetization is greater.
- (a)
- The speed is higher, the core saturation is less and less excitation power is required.
- (b)
- The skin effect and proximity effect of the generator windings will be more obvious with the increase in frequency, so the AC loss is greater.
- (c)
- Eddy current losses in the damping windings of the main generator and the permanent magnets of the PM machine become larger as the frequency increases.
- (d)
- High speed corresponds to high frequency, the reactance of the generator becomes larger, the armature reaction is enhanced.
- (e)
- Variations in the MG excitation current and the armature reactance of the exciter also affect the rectifier operating mode of the rotation rectifier.
- (f)
- The stress of the generator rotor will be greater under the higher speed, which will increase the risk of structural damage to the generator rotor.
- (a)
- The power capability of the generator needs to be checked at high temperature and low-speed conditions.
- (b)
- The magnetic circuit saturation of the generator needs to be checked under high temperature, low speed and inductive overload conditions.
- (c)
- The power quality of the generator needs to be checked under high temperature and high-speed conditions, the load conditions depend on the specific situation.
- (d)
- The electromagnetic losses of the generator reach their maximum values at high temperature, low speed and inductive overload conditions.
- (e)
- The winding temperature rise of the generator needs to be checked at high flight altitude, high temperature, low speed and inductive overload conditions.
- (f)
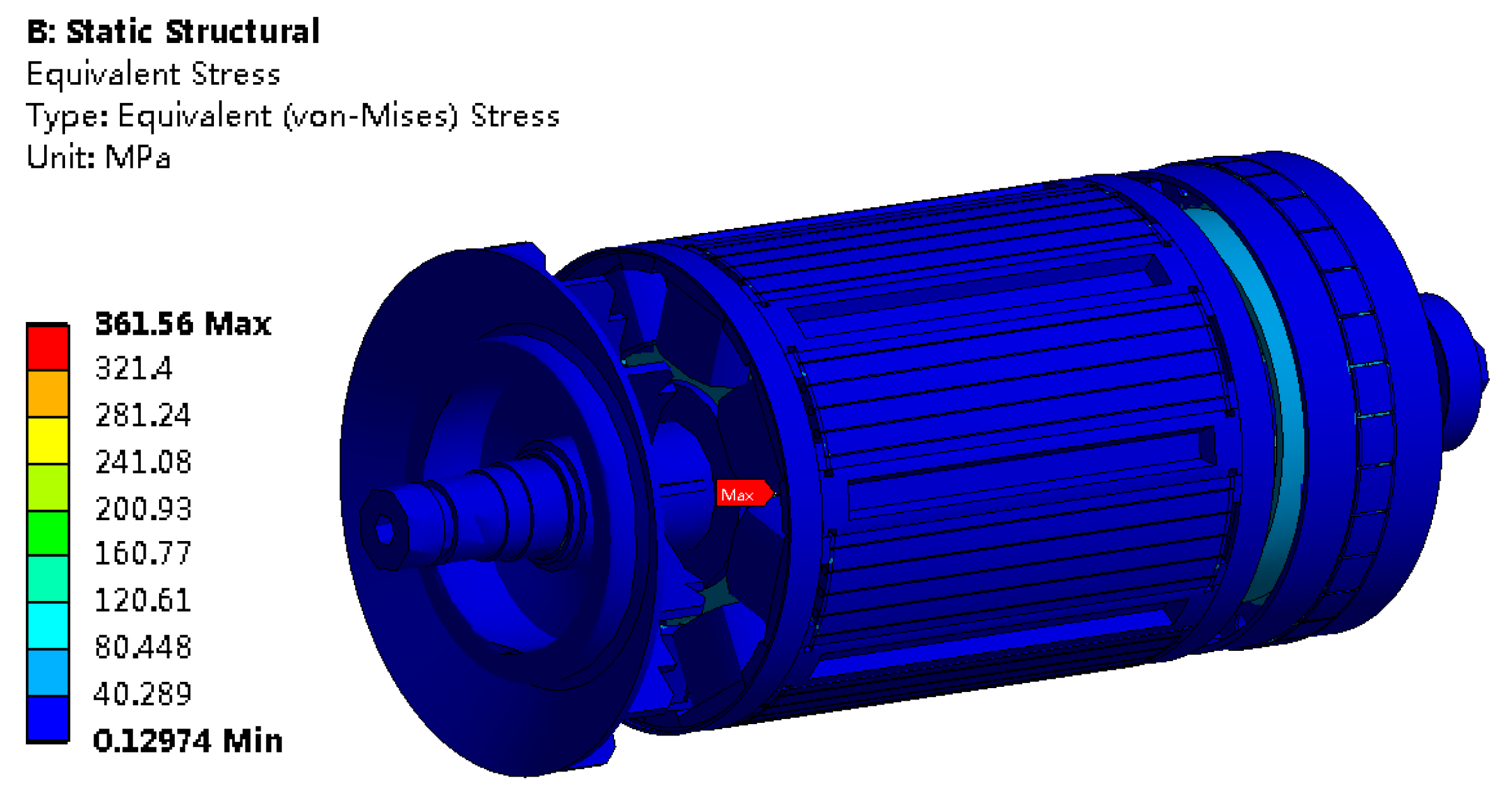
- The structural strength of the generator rotor needs to be checked under high temperature and high-speed conditions.
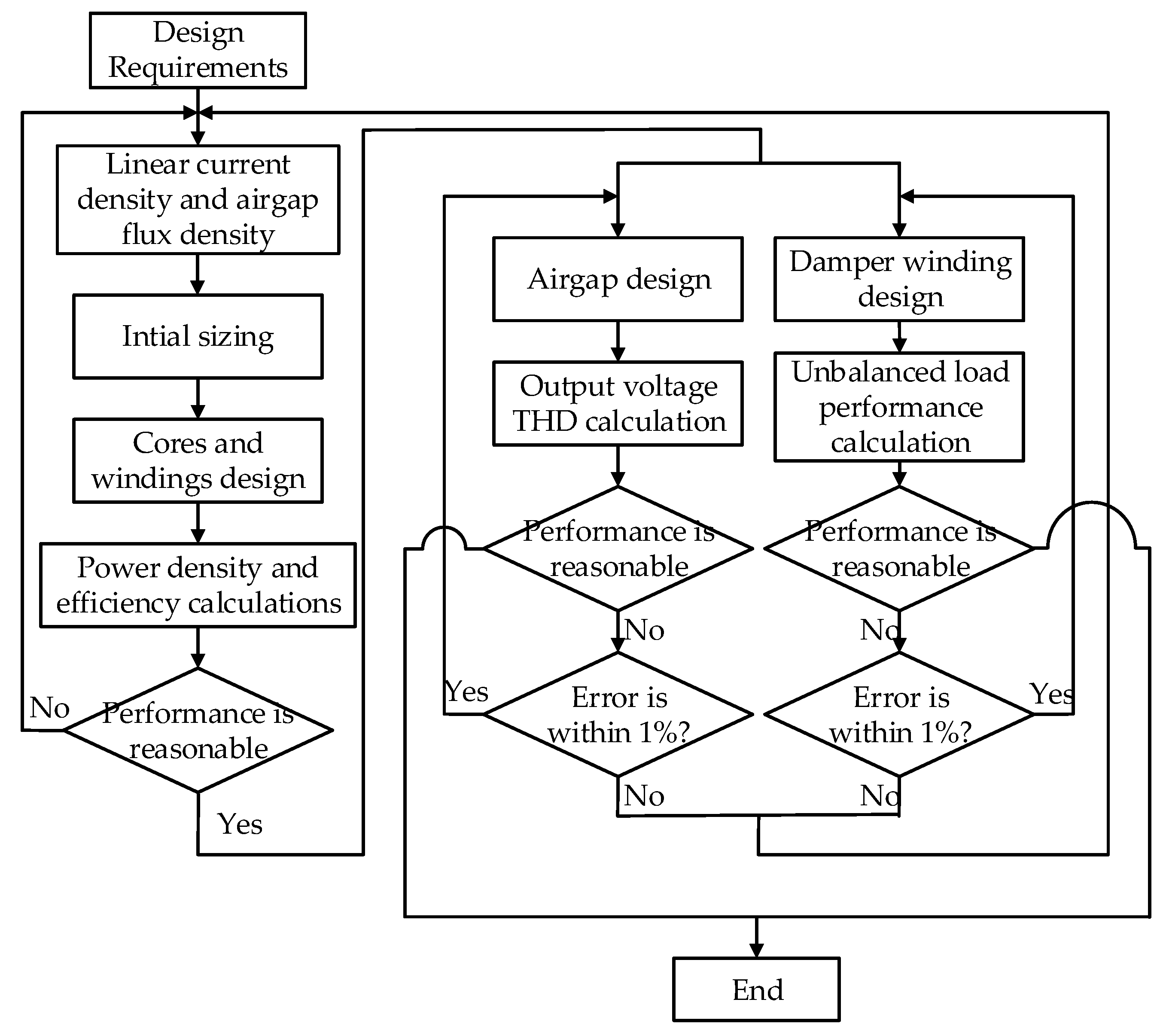
3. Design Method
3.1. Electromagnetic Design
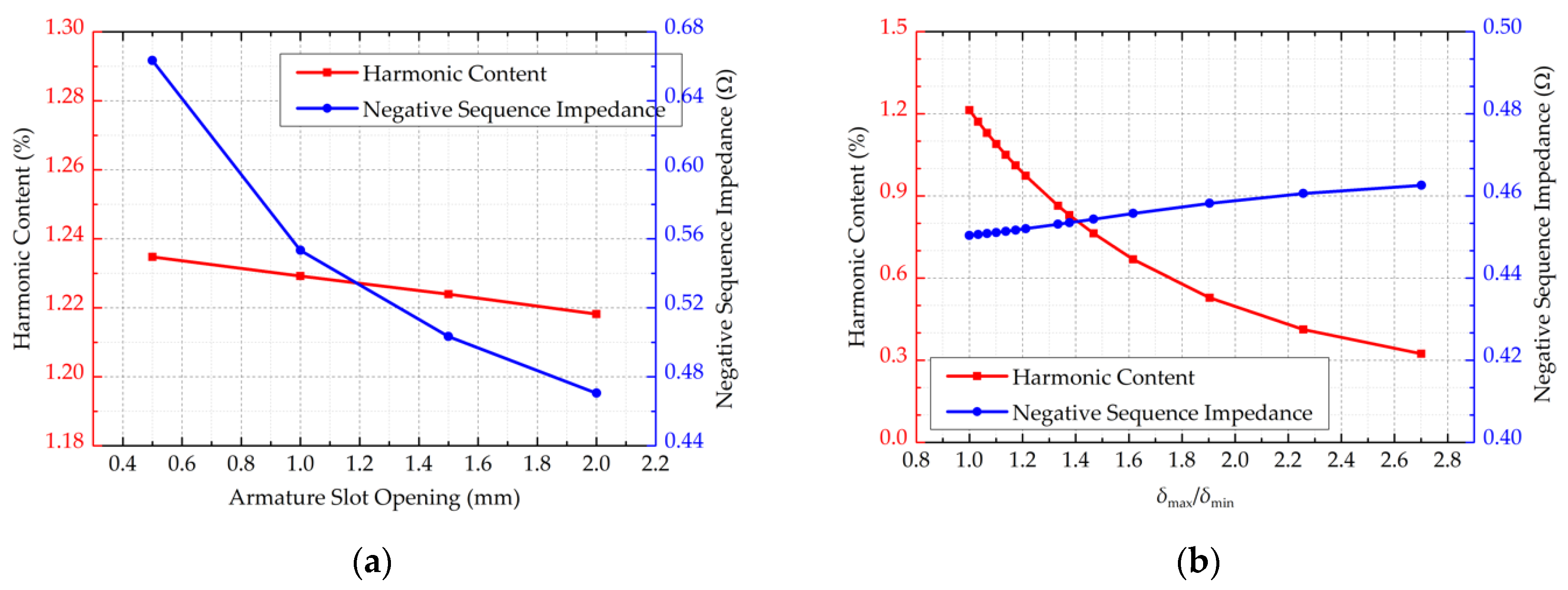
- (a)
- When the Bs0 becomes greater, the negative sequence impedance decreases sharply and the harmonic content decreases slightly.
- (b)
- The more uneven the air gap is, the smaller the harmonic content is.
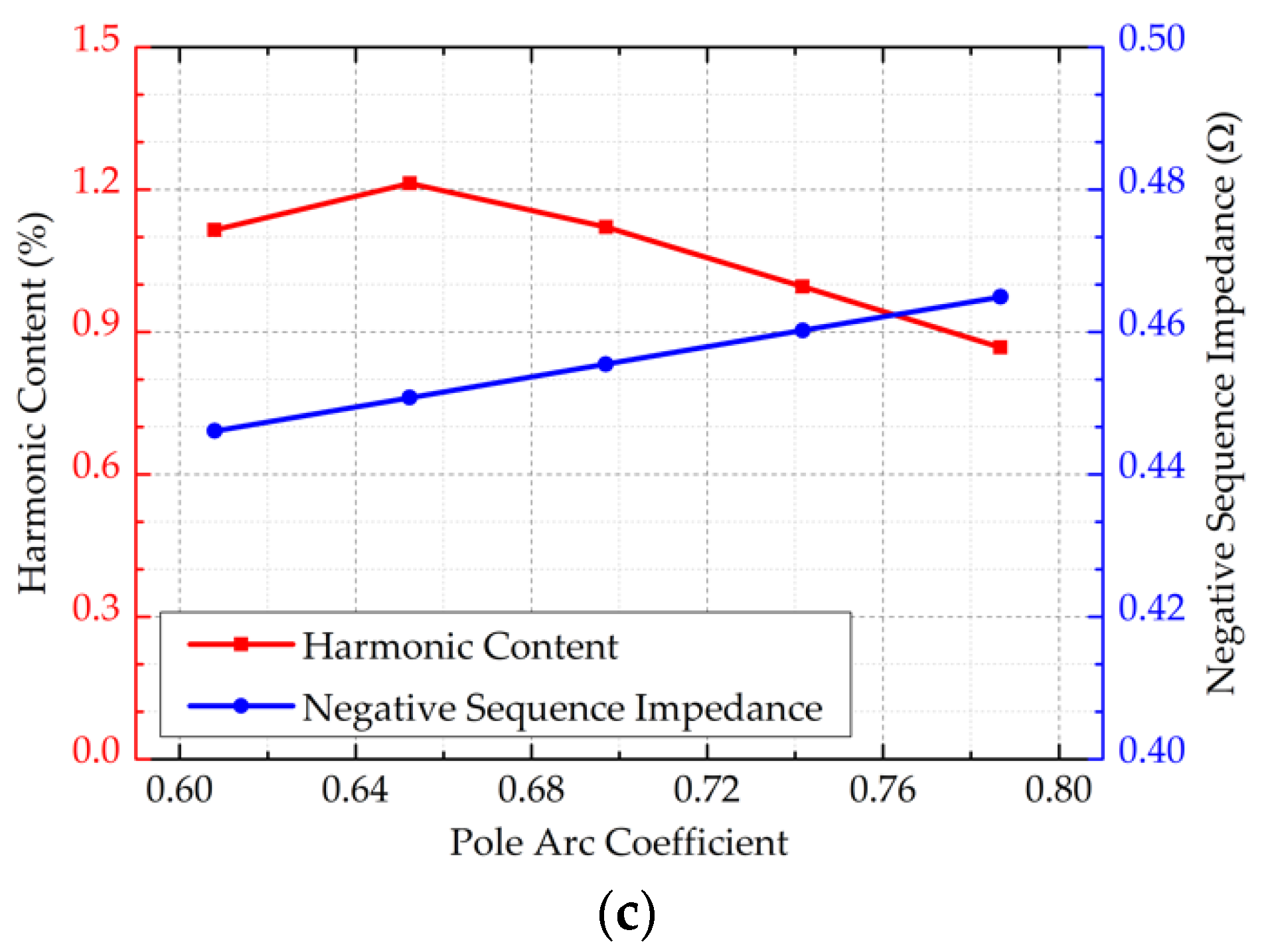
- (c)
- αp has a limited influence on the negative sequence impedance, but its effect on the harmonic content is significant, as αp gradually increases, the harmonic content first increases and then decreases.
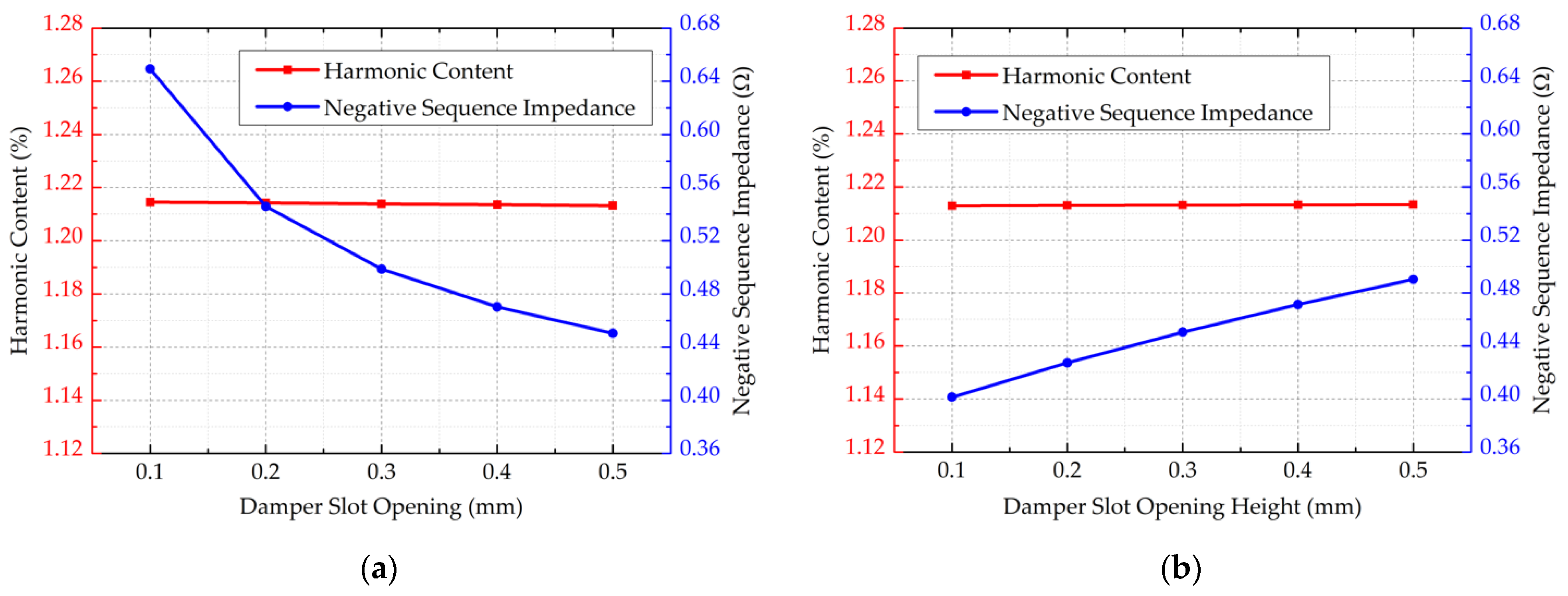
- (a)
- The parameters related to the damping winding have an almost slight effect on the harmonic content and are mainly used to reduce the negative sequence impedance.
- (b)
- The negative sequence impedance decreases significantly with the increase of Bd0.
- (c)
- Hd0 has a greater effect on the negative sequence impedance.
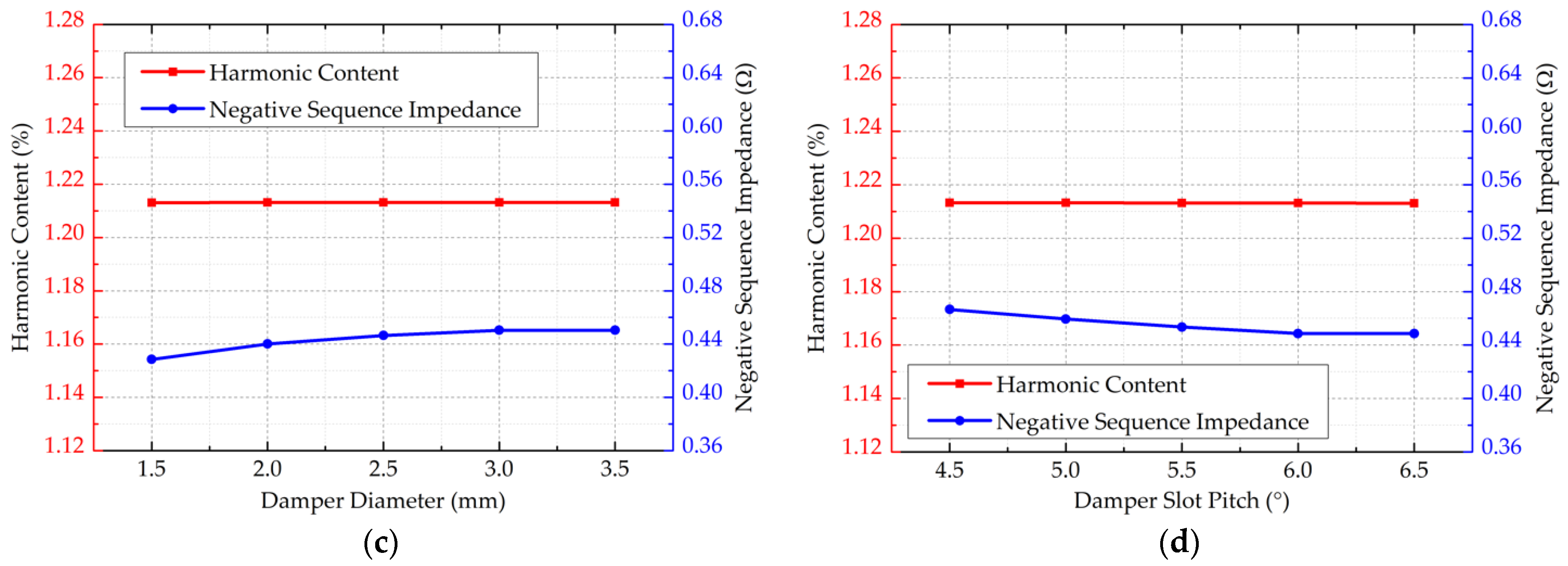
- (d)
- The influence of Dd on the negative sequence impedance is small. When Db increases, although the negative sequence resistance decreases, the leakage reactance of the damping winding increases, which leads to a larger negative sequence impedance.
- (e)
- The effect of SP on the negative sequence impedance is small.
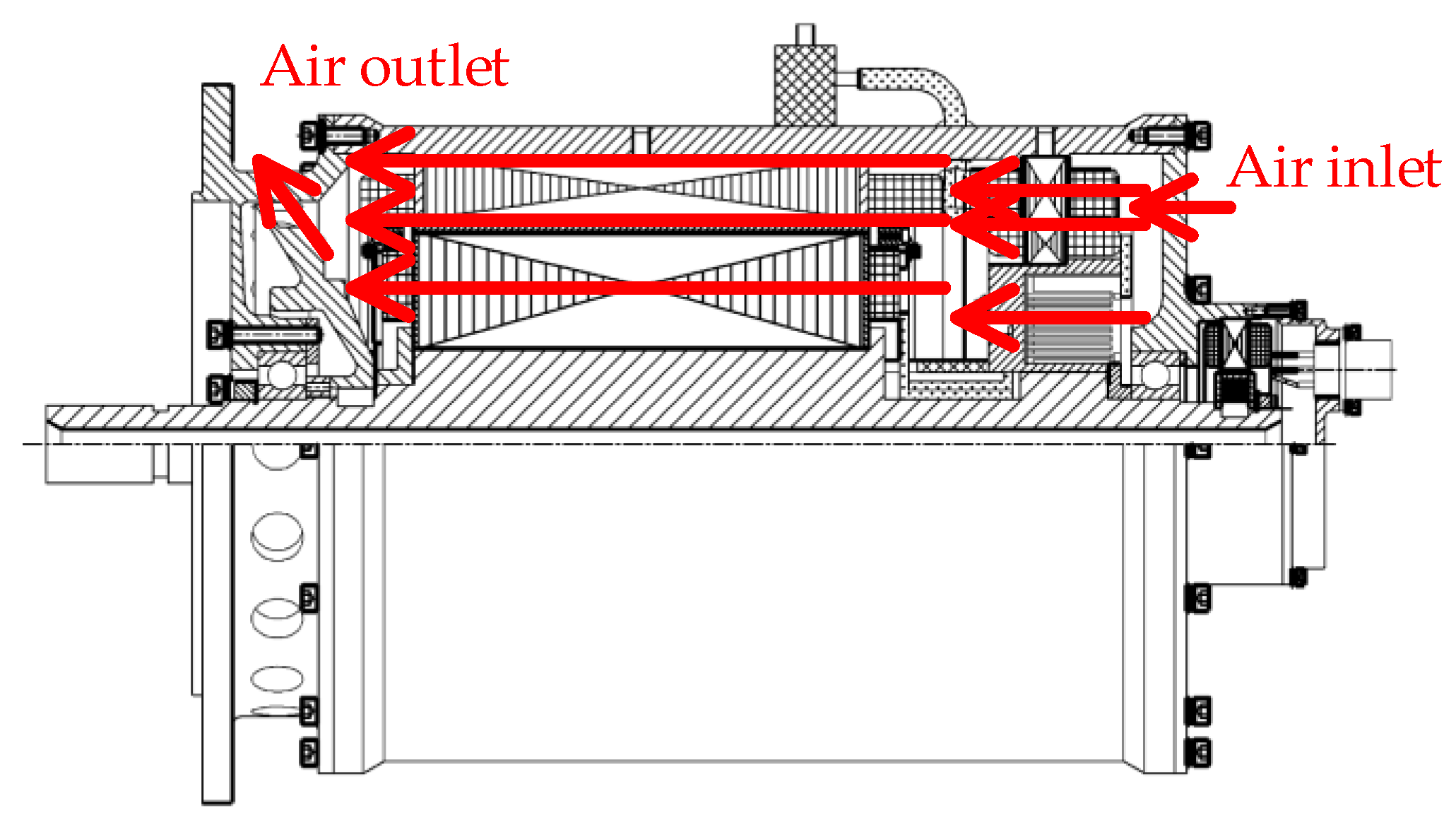
3.2. Cooling Design
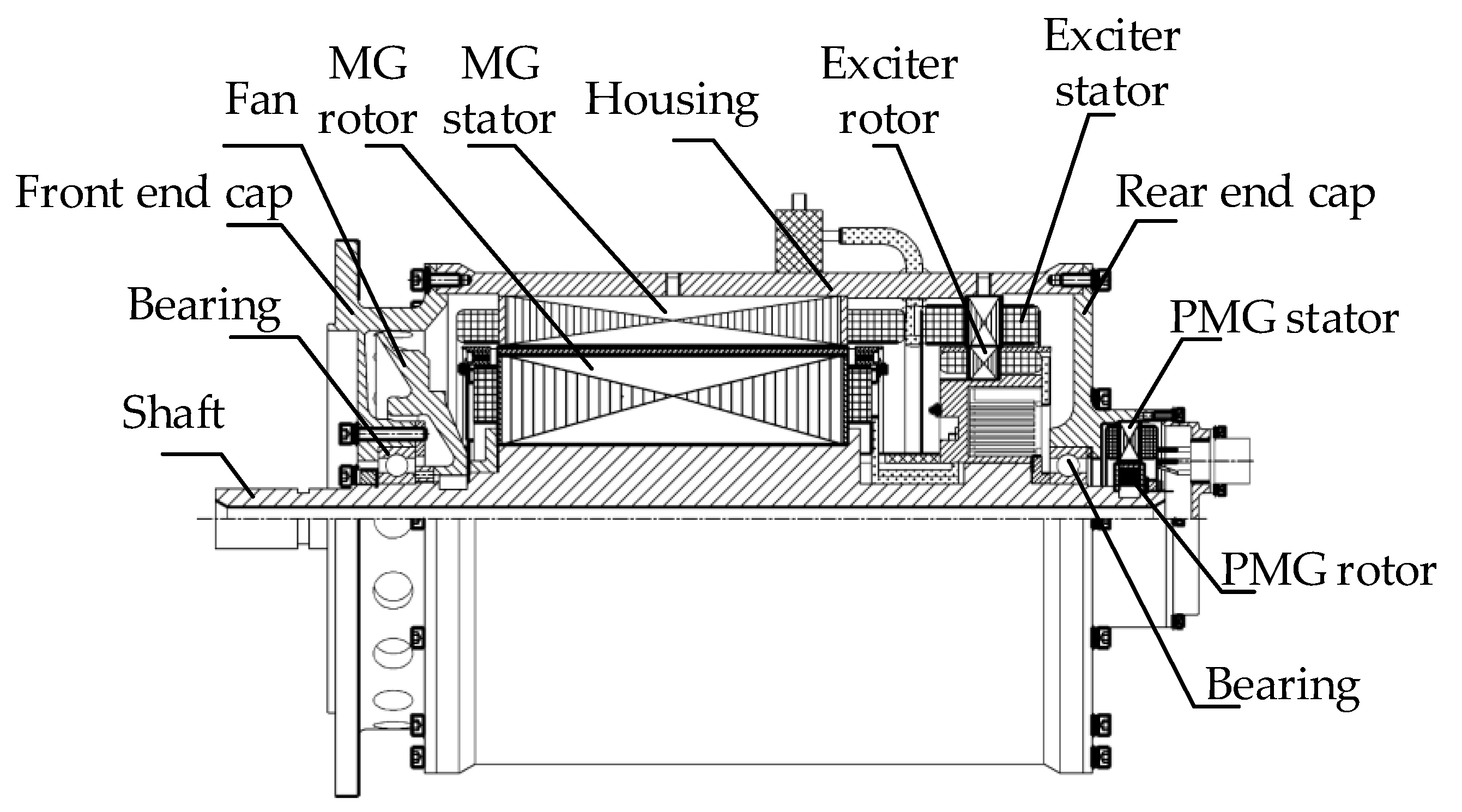
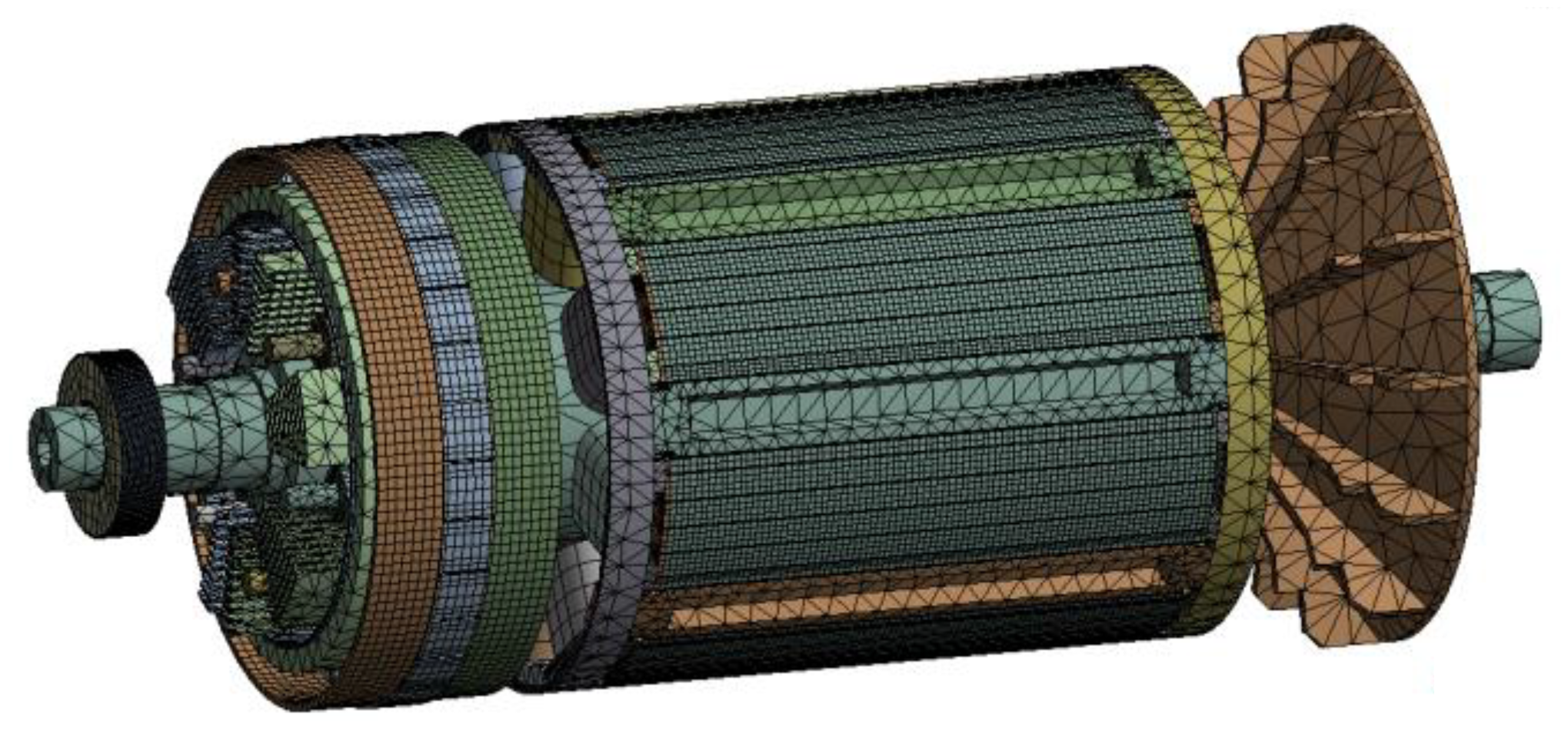
3.3. Structural Design
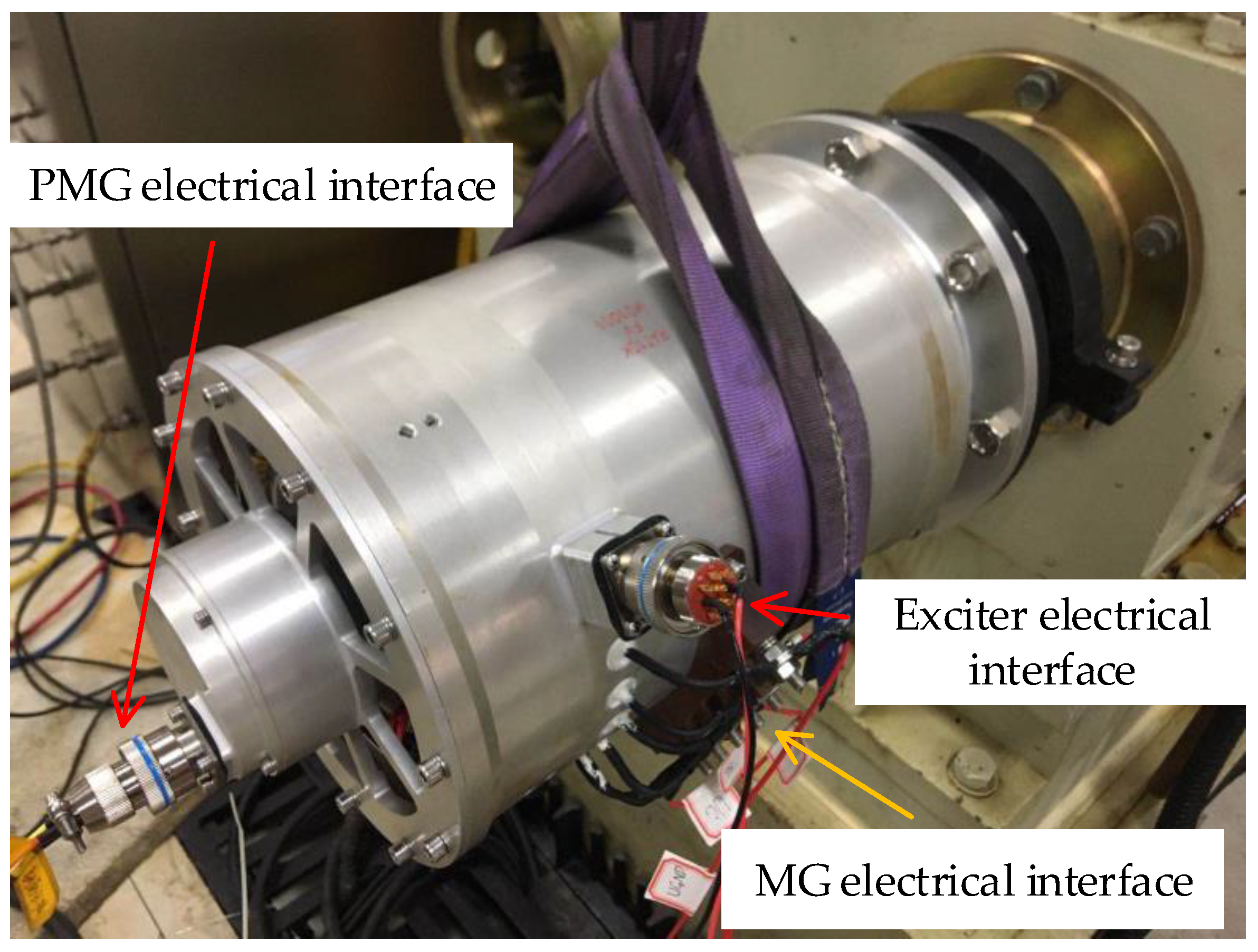
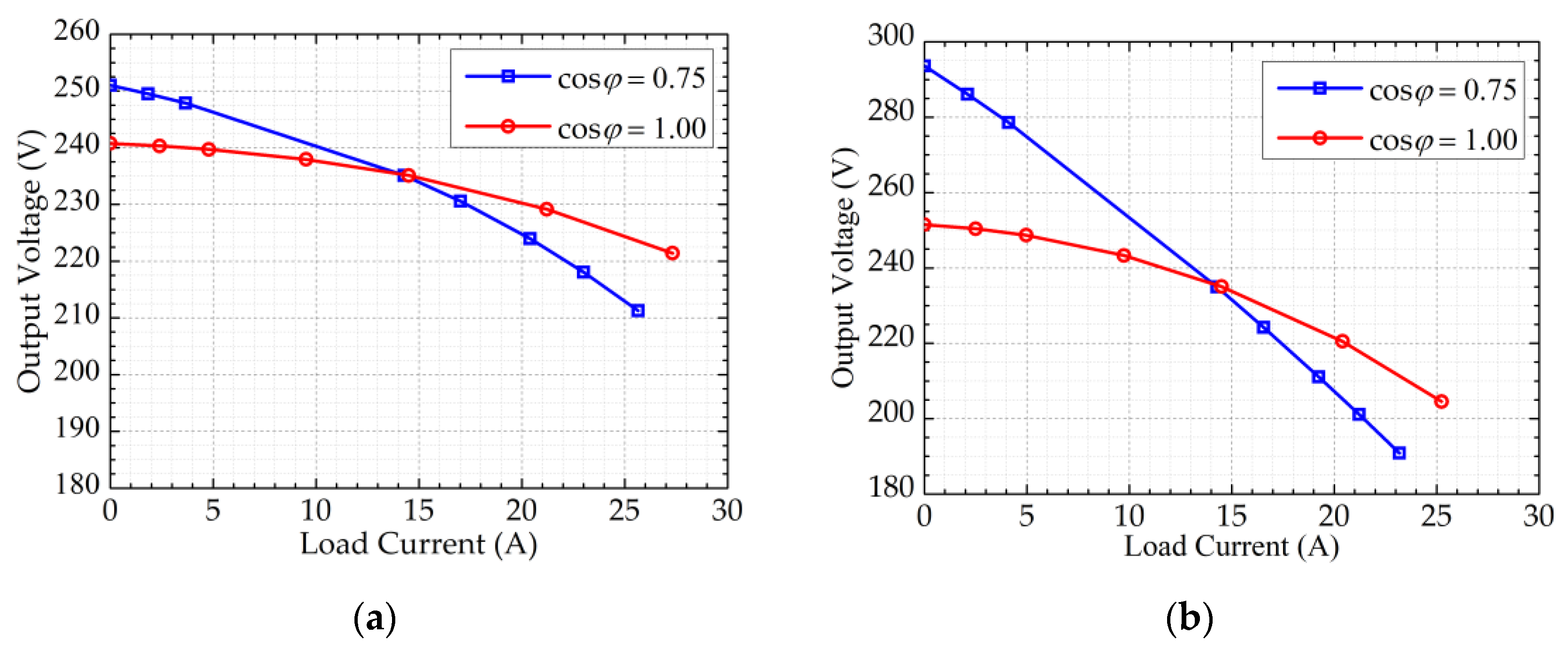
4. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wheeler, P.; Bozhko, S. The More Electric Aircraft: Technology and challenges. IEEE Electrif. Mag. 2014, 2, 6–12. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T. More Electric Aircraft: Review, Challenges, and Opportunities for Commercial Transport Aircraft. IEEE Trans. Transp. Electrif. 2015, 1, 54–64. [Google Scholar] [CrossRef]
- Tom, L.; Khowja, M.; Vakil, G.; Gerada, C. Commercial Aircraft Electrification—Current State and Future Scope. Energies 2021, 14, 8381. [Google Scholar] [CrossRef]
- Madonna, V.; Giangrande, P.; Galea, M. Electrical Power Generation in Aircraft: Review, Challenges, and Opportunities. IEEE Trans. Transp. Electrif. 2018, 4, 646–659. [Google Scholar] [CrossRef]
- Burns, J.V. Constant Speed Generating Systems; SAE Technical Paper 771001; SAE: Warrendale, PA, USA, 1977. [Google Scholar] [CrossRef]
- Barzkar, A.; Ghassemi, M. Electric Power Systems in More and All Electric Aircraft: A Review. IEEE Access 2020, 8, 169314–169332. [Google Scholar] [CrossRef]
- Nøland, J.K.; Leandro, M.; Suul, J.A.; Molinas, M. High-Power Machines and Starter-Generator Topologies for More Electric Aircraft: A Technology Outlook. IEEE Access 2020, 8, 130104–130123. [Google Scholar] [CrossRef]
- Wang, Y.; Nuzzo, S.; Zhang, H.; Zhao, W.; Gerada, C.; Galea, M. Challenges and Opportunities for Wound Field Synchronous Generators in Future More Electric Aircraft. IEEE Trans. Transp. Electrif. 2020, 6, 1466–1477. [Google Scholar] [CrossRef]
- Pasquinelli, M.G.; Bolognesi, P.; Guiducci, A.; Nuzzo, S.; Galea, M. Design of a High-Speed Wound-Field Synchronous Generator for the More Electric Aircraft. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; pp. 64–69. [Google Scholar]
- Wang, Y.; Wang, H.; Liu, W.; Wang, Q. A Novel Fuzzy PI Control Method for Variable Frequency Brushless Synchronous Generators. Energies 2021, 14, 7950. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, S.; Niu, S.; Fu, W.; Zhang, X. A Novel High-Order-Harmonic Winding Design Method for Vernier Reluctance Machine With DC Coils across Two Stator Teeth. IEEE Trans. Ind. Electron. 2022, 69, 7696–7707. [Google Scholar] [CrossRef]
- Zhao, X.; Niu, S.; Zhang, X.; Fu, W. Flux-Modulated Relieving-DC-Saturation Hybrid Reluctance Machine With Synthetic Slot-PM Excitation for Electric Vehicle In-Wheel Propulsion. IEEE Trans. Ind. Electron. 2021, 68, 6075–6086. [Google Scholar] [CrossRef]
- Camarano, T.; Wu, T.; Rodriguez, S.; Zumberge, J.; Wolff, M. Design and modeling of a five-phase aircraft synchronous generator with high power density. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1878–1885. [Google Scholar]
- Jordan, S. Multiphase Synchronous Generators for DC Aircraft Power Systems; The University of Manchester: Ann Arbor, MI, USA, 2013. [Google Scholar]
- Alnajjar, M.; Gerling, D. Six-phase electrically excited synchronous generator for More Electric Aircraft. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Capri, Italy, 22–24 June 2016; pp. 7–13. [Google Scholar]
- Zhang, X. Multiphase Synchronous Generator-Rectifier System for More-Electric Transport Applications; The University of Manchester: Ann Arbor, MI, USA, 2019. [Google Scholar]
- Iden, S.M.; Yost, K.; Spakovsky, M.V.; Allison, D.L. Conceptual Design Methods for New Aircraft Generators. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Wang, Y.; Nuzzo, S.; Gerada, C.; Zhao, W.; Zhang, H.; Galea, M. 3D Lumped Parameter Thermal Network for Wound-Field Synchronous Generators. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; pp. 5–9. [Google Scholar]
- Nøland, J.K.; Nuzzo, S.; Tessarolo, A.; Alves, E.F. Excitation System Technologies for Wound-Field Synchronous Machines: Survey of Solutions and Evolving Trends. IEEE Access 2019, 7, 109699–109718. [Google Scholar] [CrossRef]
- Bazzo, T.d.M.; Kölzer, J.F.; Carlson, R.; Wurtz, F.; Gerbaud, L. Multiphysics Design Optimization of a Permanent Magnet Synchronous Generator. IEEE Trans. Ind. Electron. 2017, 64, 9815–9823. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines (2); John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Li, J.; Zhang, Z.; Lu, J.; Chen, C. Analysis and Design of Damper Winding of Salient-Pole Synchronous Generator for Negative-Sequence Reactance Reduction. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 543–548. [Google Scholar]
- Fratila, M.; Benabou, A.; Tounzi, A.; Dessoude, M. Iron Loss Calculation in a Synchronous Generator Using Finite Element Analysis. IEEE Trans. Energy Convers. 2017, 32, 640–648. [Google Scholar] [CrossRef]
- Wrobel, R.; Mellor, P.H.; Popescu, M.; Staton, D.A. Power Loss Analysis in Thermal Design of Permanent-Magnet Machines—A Review. IEEE Trans. Ind. Appl. 2016, 52, 1359–1368. [Google Scholar] [CrossRef] [Green Version]
- Traxler-Samek, G.; Zickermann, R.; Schwery, A. Cooling Airflow, A. Losses, and Temperatures in Large Air-Cooled Synchronous Machines. IEEE Trans. Ind. Electron. 2020, 57, 172–180. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Twin-Engine Jet | Four-Engine Jet | ||||
|---|---|---|---|---|---|---|
| Aircraft | A330 | B777 | B787 | A350 | B747 | A380 |
| First flight year | 1992 | 1994 | 2009 | 2013 | 1988 | 2005 |
| Rated voltage/V | 115 | 115 | 230 | 230 | 115 | 115 |
| Number of generators | 2 | 2 | 4 | 4 | 4 | 4 |
| Rated capacity/kVA | 115 | 120 | 250 | 100 | 90 | 150 |
| Generator type | IDG | IDG | VFG | VFG | IDG | VFG |
| Aircraft | Rated Power | CSD Weight | IDG Weight | CSD Weight Share |
|---|---|---|---|---|
| A-10A | 30/40 kVA | 20.9 kg | 34.5 kg | 69.7% |
| F-14A | 60/75 kVA | 31.3 kg | 51.7 kg | 60.5% |
| F-15 | 40/50 kVA | 22.2 kg | 38.6 kg | 57.5% |
| F-16 | 40 kVA | 22.2 kg | 37.6 kg | 59.0% |
| B747 | 90 kVA | 41.7 kg | 62.6 kg | 66.6% |
| No. | Performance Items | Unit | Performance Indicators |
|---|---|---|---|
| 1 | Rated voltage | Vrms | 230/400 |
| 2 | Power rating | kVA | 10 |
| 3 | Rated frequency | Hz | 453~641 |
| 4 | Power factor | 0.75 (lag.) to 1.00 | |
| 5 | Efficiency | ≮80% | |
| 6 | Overload capacity | kVA | 15 (last 5 min) 20 (last 5 s) |
| 7 | Electricity quality | MIL-STD-704F | |
| 8 | Weight | kg | ≯40 |
| 9 | Size | mm | ≯600 × 600 × 600 |
| 10 | Rated speed | rpm | 6795~9615 |
| 11 | Maximum overspeed | rpm | 10,000 (last 5 min) |
| 12 | Static suspension torque | N∙m | ≯100 |
| 13 | Cooling method | Forced air cooling |
| No. | Parameters | Unit | MG | Exciter | PMG |
|---|---|---|---|---|---|
| 1 | Number of slots | 60 | 30 | 12 | |
| 2 | Number of pole pairs | 4 | 5 | 5 | |
| 3 | Core length | mm | 145 | 12 | 9 |
| 4 | Stator outer diameter | mm | 186 | 186 | 70 |
| 5 | Stator inner diameter | mm | 150 | 148.8 | 50 |
| 6 | Air gap length | mm | 1.0 | 0.4 | 1.5 |
| 7 | Rotor inner diameter | mm | 64 | 110 | 34 |
| 8 | Pole arc coefficient | 0.65 | 0.72 | 0.9 | |
| 9 | Armature winding turns | 40 | 20 | 180 | |
| 10 | Armature winding strands | 1 | 13 | 2 | |
| 11 | Armature winding size | mm | 2.8 × 1.8 | ∅0.63 | ∅0.45 |
| 12 | Excitation winding turns | 14 | 58 | - | |
| 13 | Excitation winding strands | 1 | 3 | - | |
| 14 | Excitation winding size | mm | 6.3 × 1.4 | ∅0.63 | - |
| 15 | Damping winding diameter | mm | 3.0 | - | - |
| 16 | Thickness of permanent magnets | mm | - | - | 2 |
| 17 | Effective material weight | kg | 20.6 | 1.97 | 0.33 |
| Core Loss | Copper Loss | Rectifier Loss | |||
|---|---|---|---|---|---|
| Armature Winding | Excitation Winding | Damper Winding | |||
| MG | 280.11 | 245.47 | 506.69 | 28.16 | - |
| Exciter | 12.62 | 110.19 | 67.24 | - | 4.0 |
| High Temperature (70 °C) | Low Temperature (−55 °C) | |
|---|---|---|
| Sea level (0 m) | 1922.33 | 3025.51 |
| High altitude (13,000 m) | 365.80 | 574.83 |
| High Temperature (70 °C) | Low Temperature (−55 °C) | |
|---|---|---|
| Sea level (0 m) | 202.64 | 318.83 |
| High altitude (13,000 m) | 74.01 | 116.45 |
| High Temperature (70 °C) | Low Temperature (−55 °C) | |
|---|---|---|
| Sea level (0 m) | 0.32 | 0.32 |
| High altitude (13,000 m) | 0.45 | 0.45 |
| Materials | Density /(kg/m3) | Young’s Modulus /GPa | Poisson’s Ratio | Yield Strength /MPa | Application Components |
|---|---|---|---|---|---|
| Pure copper | 8890 | 117.7 | 0.35 | 315 | Winding |
| Aluminum alloy | 2780 | 68 | 0.33 | 325 | Brackets |
| Electrical steel | 7750 | 200 | 0.27 | 425 | Iron core |
| Permanent magnets | 8400 | 120 | 0.24 | 510 | PMG rotor |
| Alloy steel | 7740 | 119 | 0.32 | 1630 | Shaft |
| Carbon Steel | 7850 | 198 | 0.30 | 335 | Iron core |
| Titanium alloy | 4440 | 110 | 0.34 | 860 | Sheathing |
| Laminate | 2200 | 38.1 | 0.4 | 20 | Insulated end plates |
| Rotor Speed /rpm | Load Conditions | Excitation Voltage /V | Excitation Current /A | Output Voltage /V | Output Current /A |
|---|---|---|---|---|---|
| 6795 | No load | 3.1 | 2.98 | 234.9 | 0 |
| 100% load, cos φ = 0.75 | 3.7 | 3.54 | 235.0 | 14.3 | |
| 200% load, cos φ = 0.75 | 4.4 | 4.18 | 235.1 | 28.6 | |
| 100% load, cos φ = 1.00 | 3.3 | 3.14 | 235.0 | 14.4 | |
| 200% load, cos φ = 1.00 | 3.7 | 3.46 | 235.0 | 29.0 | |
| 9615 | No load | 2.0 | 1.95 | 235.1 | 0 |
| 100% load, cos φ = 0.75 | 2.6 | 2.44 | 235.0 | 14.3 | |
| 200% load, cos φ = 0.75 | 3.2 | 3.01 | 235.0 | 28.6 | |
| 100% load, cos φ = 1.00 | 2.2 | 2.08 | 235.1 | 14.5 | |
| 200% load, cos φ = 1.00 | 2.6 | 2.39 | 235.0 | 29.0 |
| Rotor Speed /rpm | Load Conditions | 7th Harmonic | Total Harmonic |
|---|---|---|---|
| 6795 | No load | 1.21% | 2.21% |
| 50% load, cos φ = 0.75 | 1.19% | 1.88% | |
| 100% load, cos φ = 0.75 | 1.04% | 1.66% | |
| 150% load, cos φ = 0.75 | 0.99% | 1.43% | |
| 200% load, cos φ = 0.75 | 0.97% | 1.46% | |
| 50% load, cos φ = 1.00 | 1.00% | 1.70% | |
| 100% load, cos φ = 1.00 | 1.08% | 1.66% | |
| 150% load, cos φ = 1.00 | 0.94% | 1.48% | |
| 200% load, cos φ = 1.00 | 0.97% | 1.46% | |
| 7500 | No load | 1.17% | 1.99% |
| 50% load, cos φ = 0.75 | 1.06% | 1.61% | |
| 100% load, cos φ = 0.75 | 1.04% | 1.47% | |
| 150% load, cos φ = 0.75 | 1.00% | 1.43% | |
| 200% load, cos φ = 0.75 | 0.97% | 1.46% | |
| 50% load, cos φ = 1.00 | 1.05% | 1.63% | |
| 100% load, cos φ = 1.00 | 1.03% | 1.54% | |
| 150% load, cos φ = 1.00 | 0.99% | 1.45% | |
| 200% load, cos φ = 1.00 | 1.00% | 1.60% | |
| 9615 | No load | 1.34% | 1.96% |
| 50% load, cos φ = 0.75 | 1.38% | 1.92% | |
| 100% load, cos φ = 0.75 | 1.32% | 1.83% | |
| 150% load, cos φ = 0.75 | 1.26% | 1.92% | |
| 200% load, cos φ = 0.75 | 1.22% | 1.91% | |
| 50% load, cos φ = 1.00 | 1.30% | 1.91% | |
| 100% load, cos φ = 1.00 | 1.19% | 1.89% | |
| 150% load, cos φ = 1.00 | 1.14% | 1.84% | |
| 200% load, cos φ = 1.00 | 1.10% | 1.68% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, H.; Liu, W.; Wang, Q.; Zhao, X. Design Method for Variable Frequency Brushless Synchronous Generators. Energies 2022, 15, 2786. https://doi.org/10.3390/en15082786
Wang Y, Wang H, Liu W, Wang Q, Zhao X. Design Method for Variable Frequency Brushless Synchronous Generators. Energies. 2022; 15(8):2786. https://doi.org/10.3390/en15082786
Chicago/Turabian StyleWang, Yongjie, Huizhen Wang, Weifeng Liu, Qin Wang, and Xing Zhao. 2022. "Design Method for Variable Frequency Brushless Synchronous Generators" Energies 15, no. 8: 2786. https://doi.org/10.3390/en15082786
APA StyleWang, Y., Wang, H., Liu, W., Wang, Q., & Zhao, X. (2022). Design Method for Variable Frequency Brushless Synchronous Generators. Energies, 15(8), 2786. https://doi.org/10.3390/en15082786