
Position-Based Impedance Control Design for a Hydraulically Actuated Series Elastic Actuator



Abstract
:1. Introduction
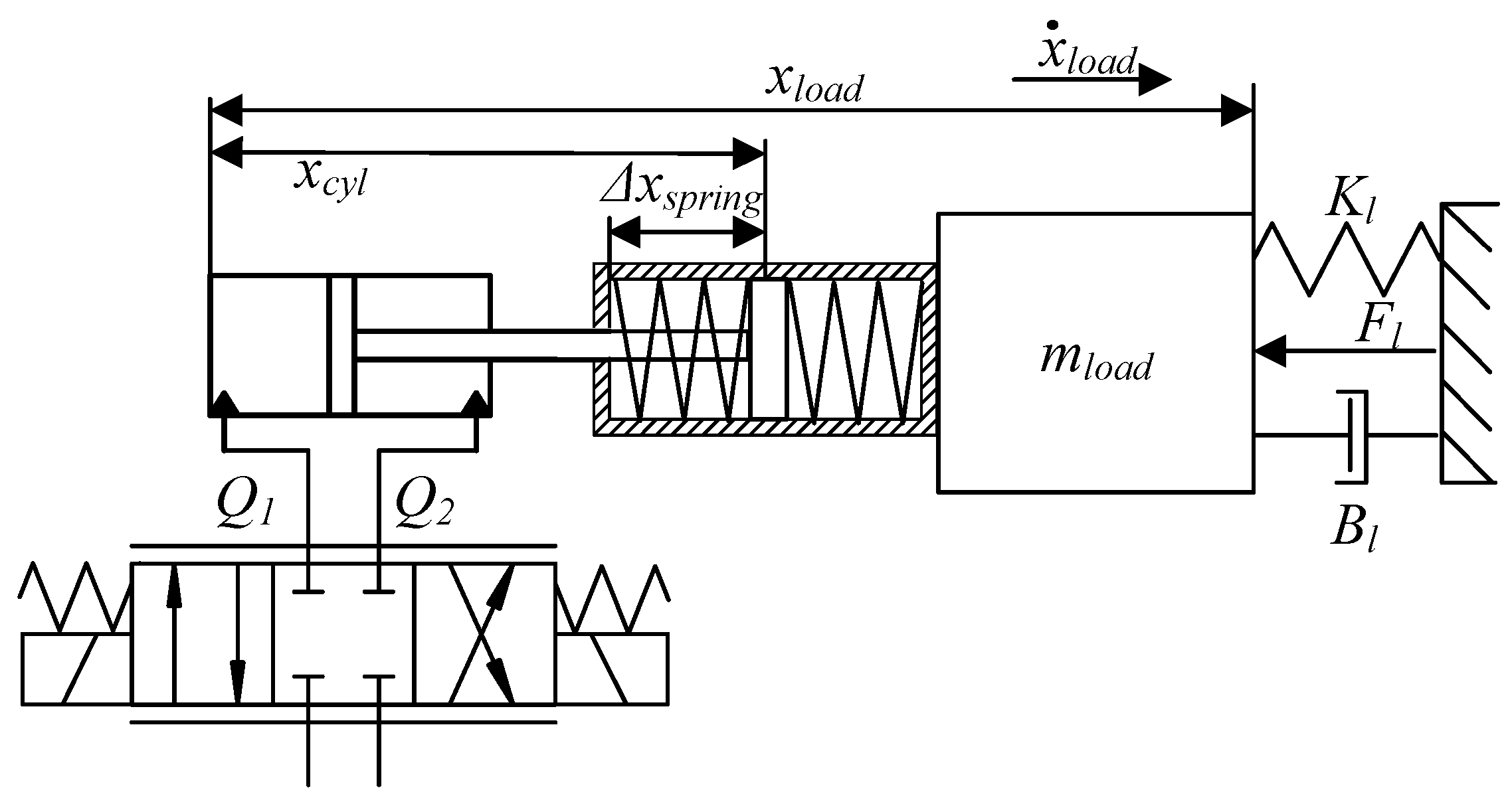
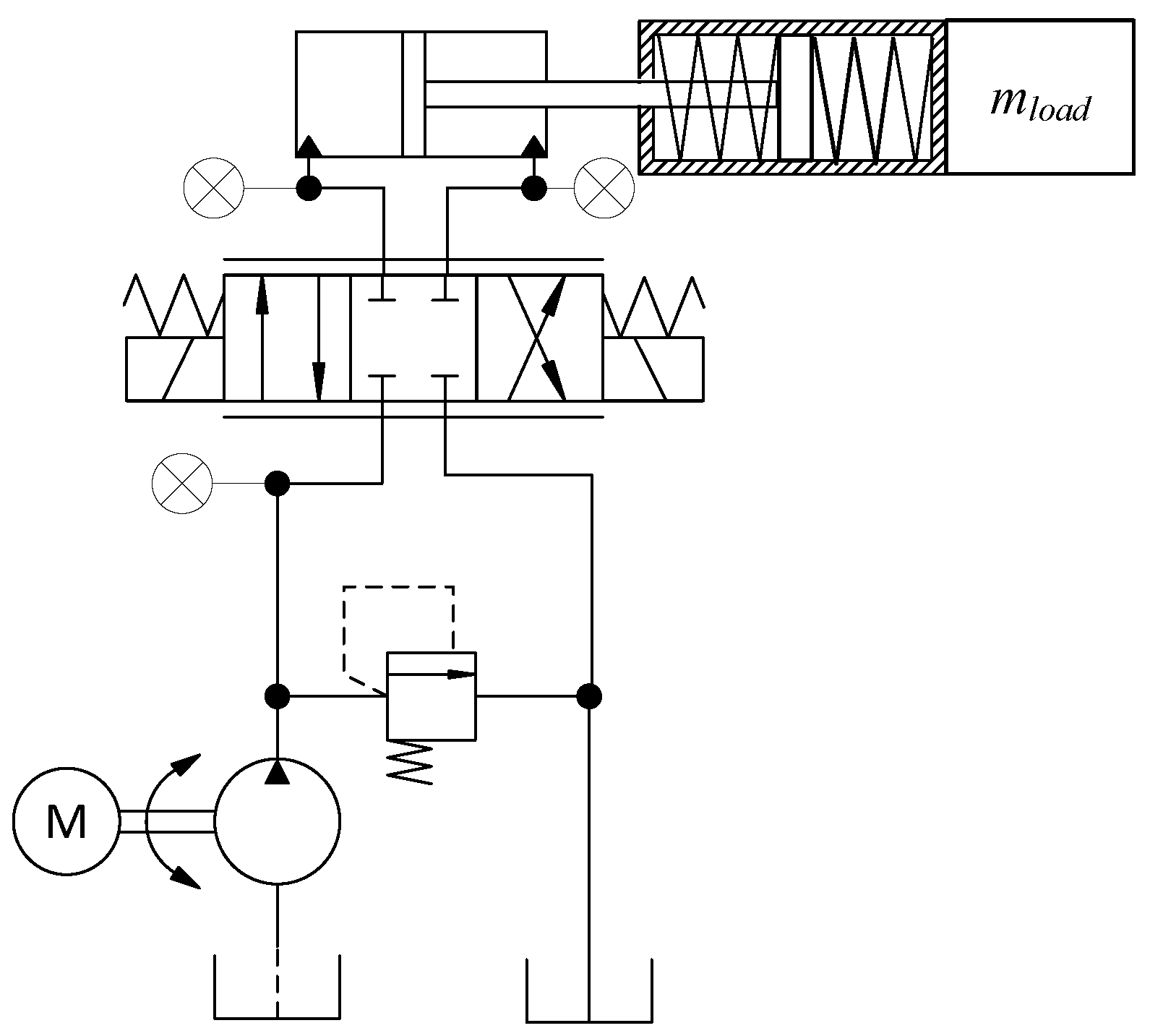
2. Modeling of the Hydraulic Series Elastic Actuator
2.1. State-Space Model for the HSEA
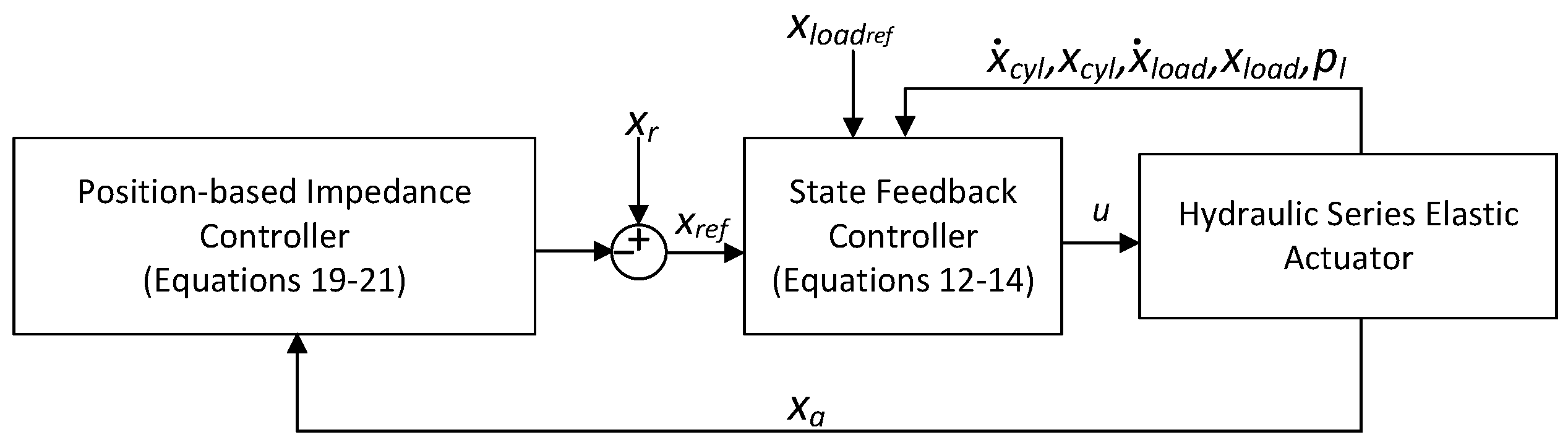
2.2. State Feedback Controller Design for the HSEA
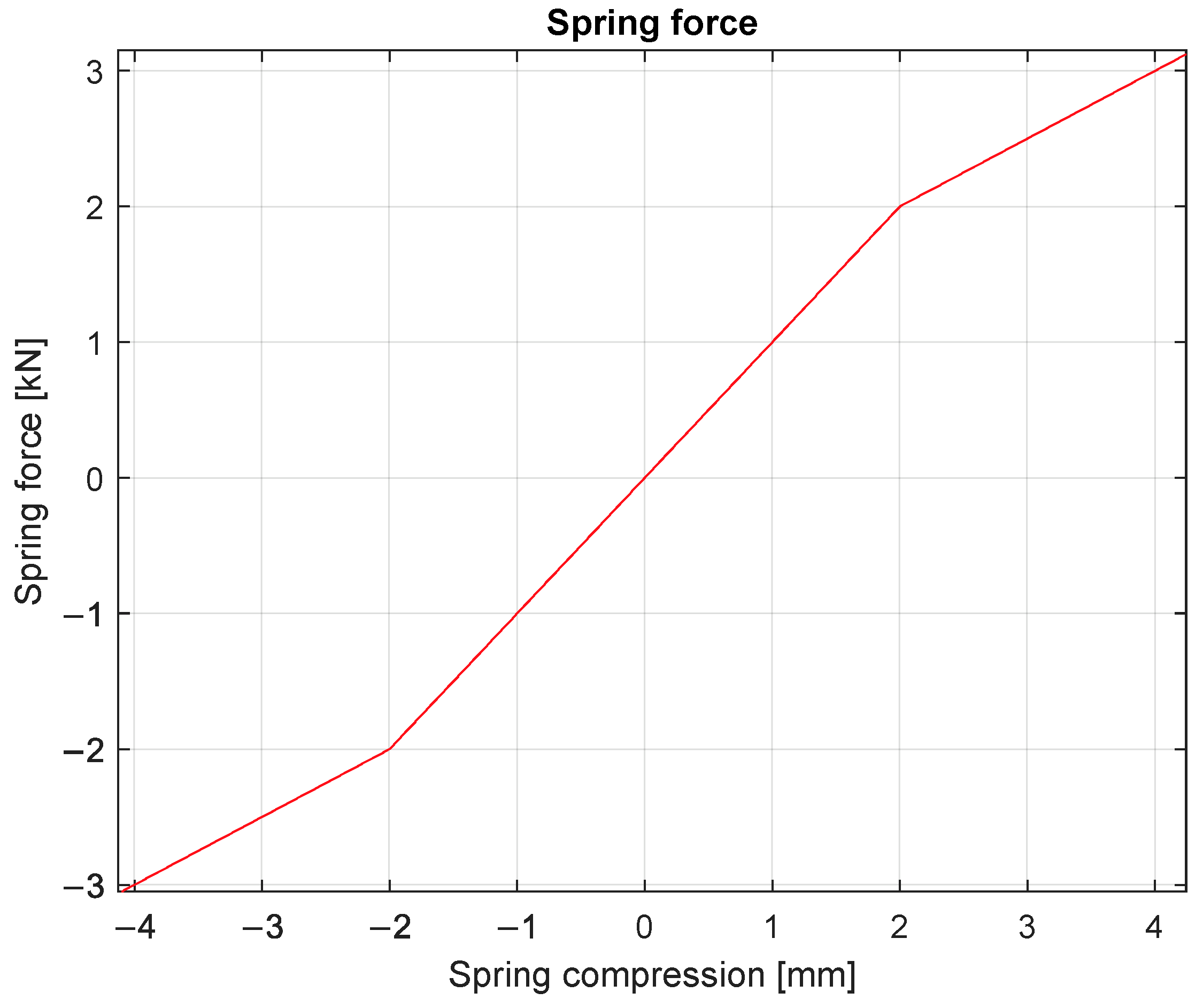
2.3. Stiffness and Natural Frequency of the HSEA
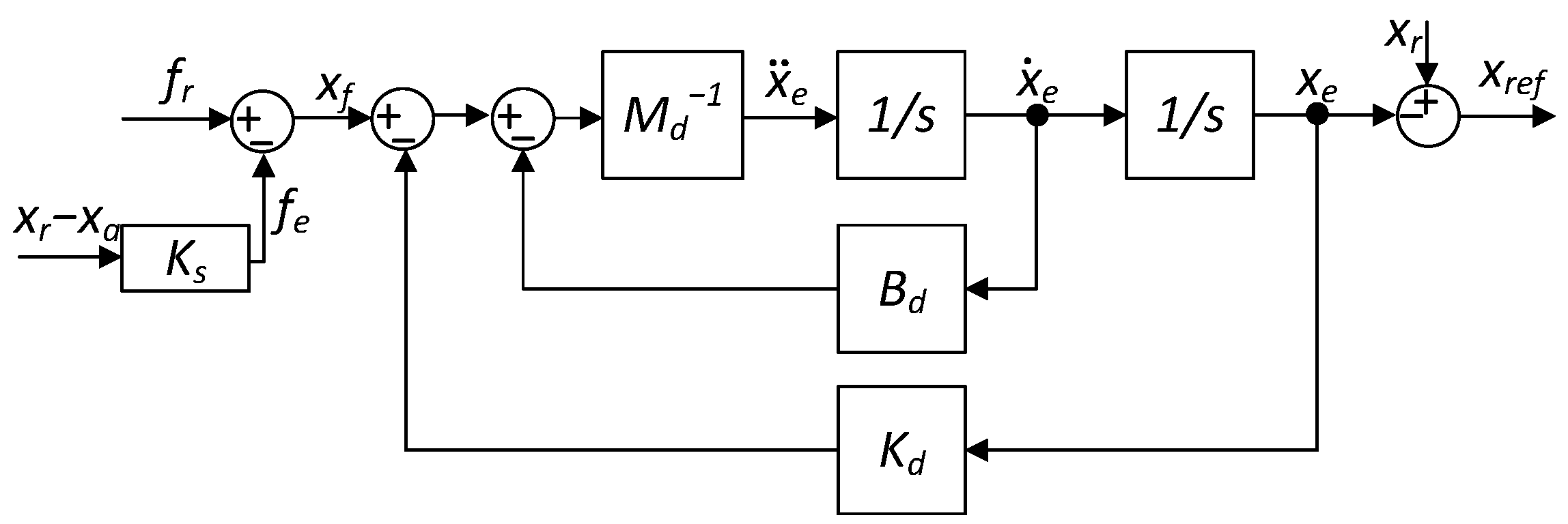
3. Position-Based Impedance Control Design
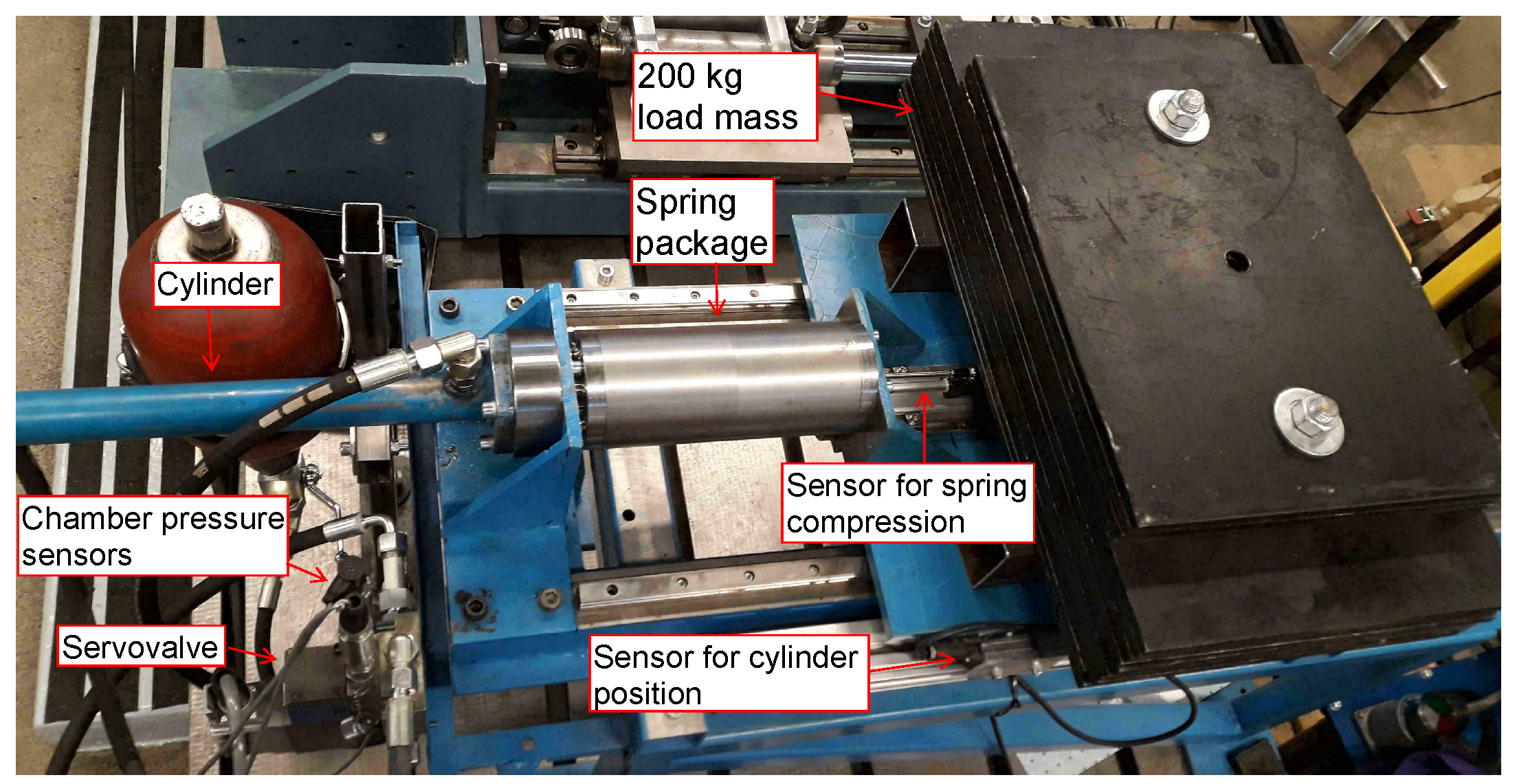
4. Experimental Results
- Industrial PC Beckhoff CX2030 with a sampling rate of 1000 Hz
- Hydraulic cylinder with the dimensions 32/18–400
- Bosch Rexroth NG6 size servo solenoid valve (40 L/min at Δp = 3.5 MPa per notch)
- Druck UNIK5000 pressure transmitter (range 25 MPa) for all pressures
- MTS linear position sensor (range 0.015 m) for a spring compression
- Heidenhain linear position sensor (range 0.54 m) for a cylinder position
- Load mass 200 kg
- Shell Tellus VG32 Hydraulic oil
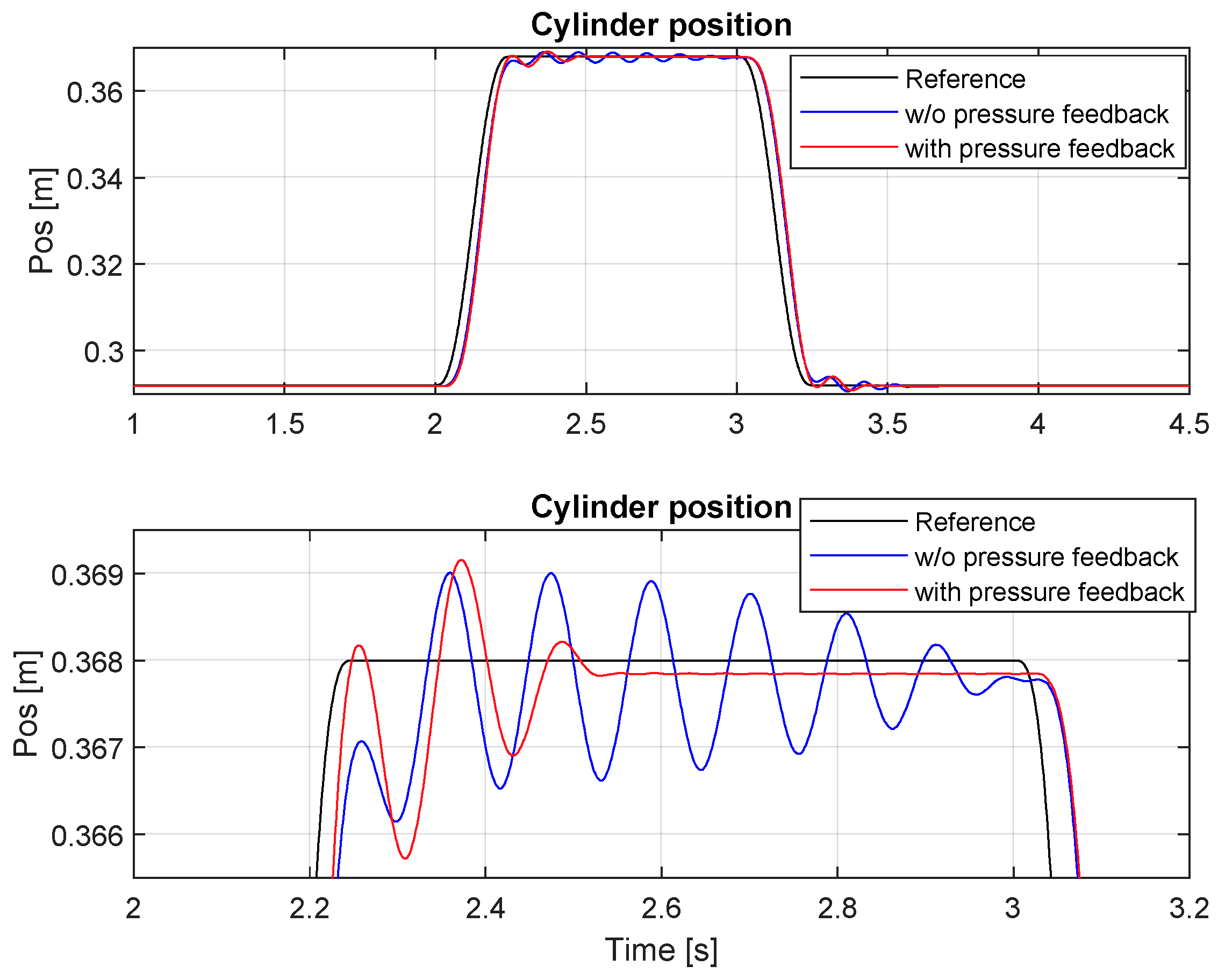
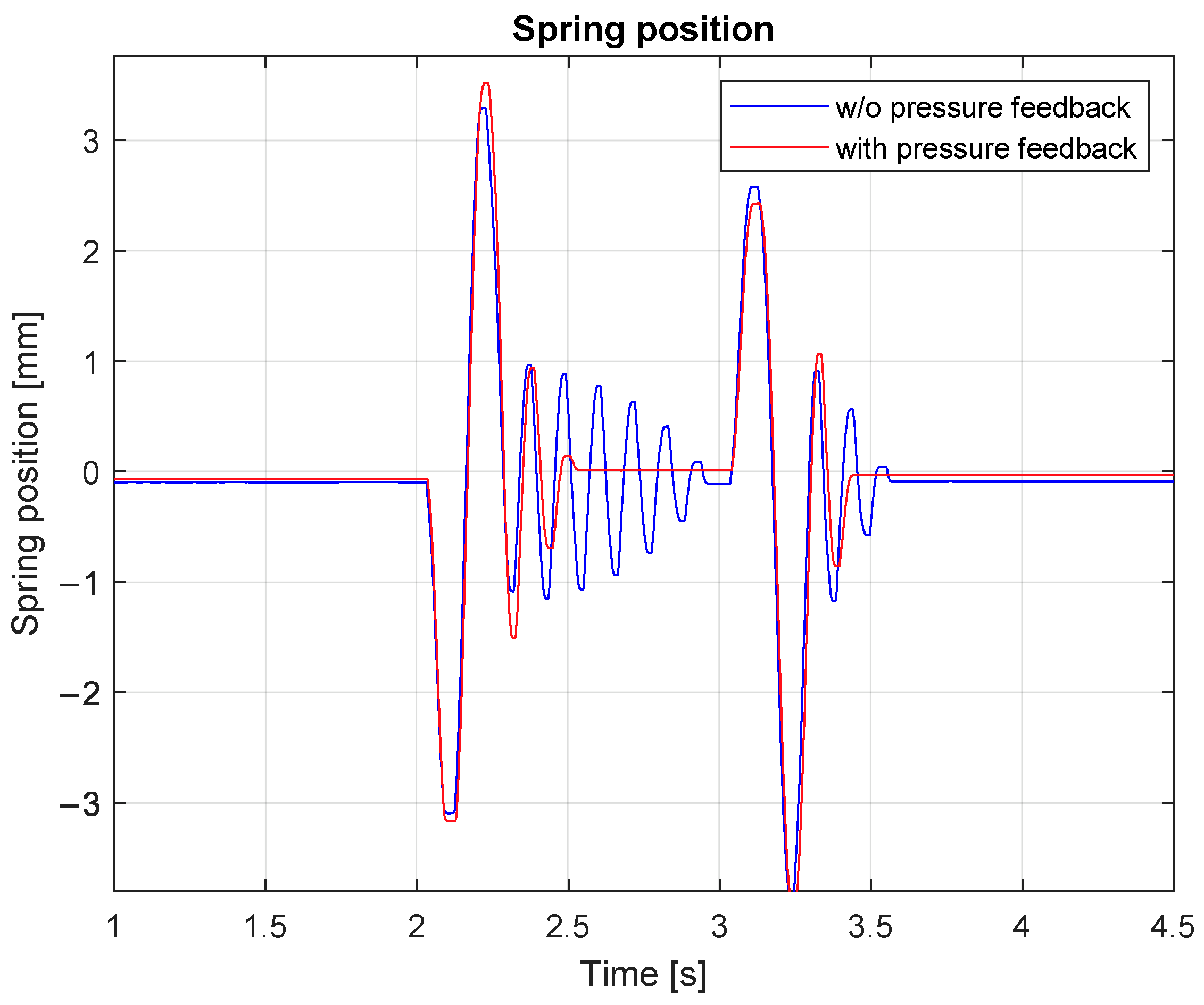
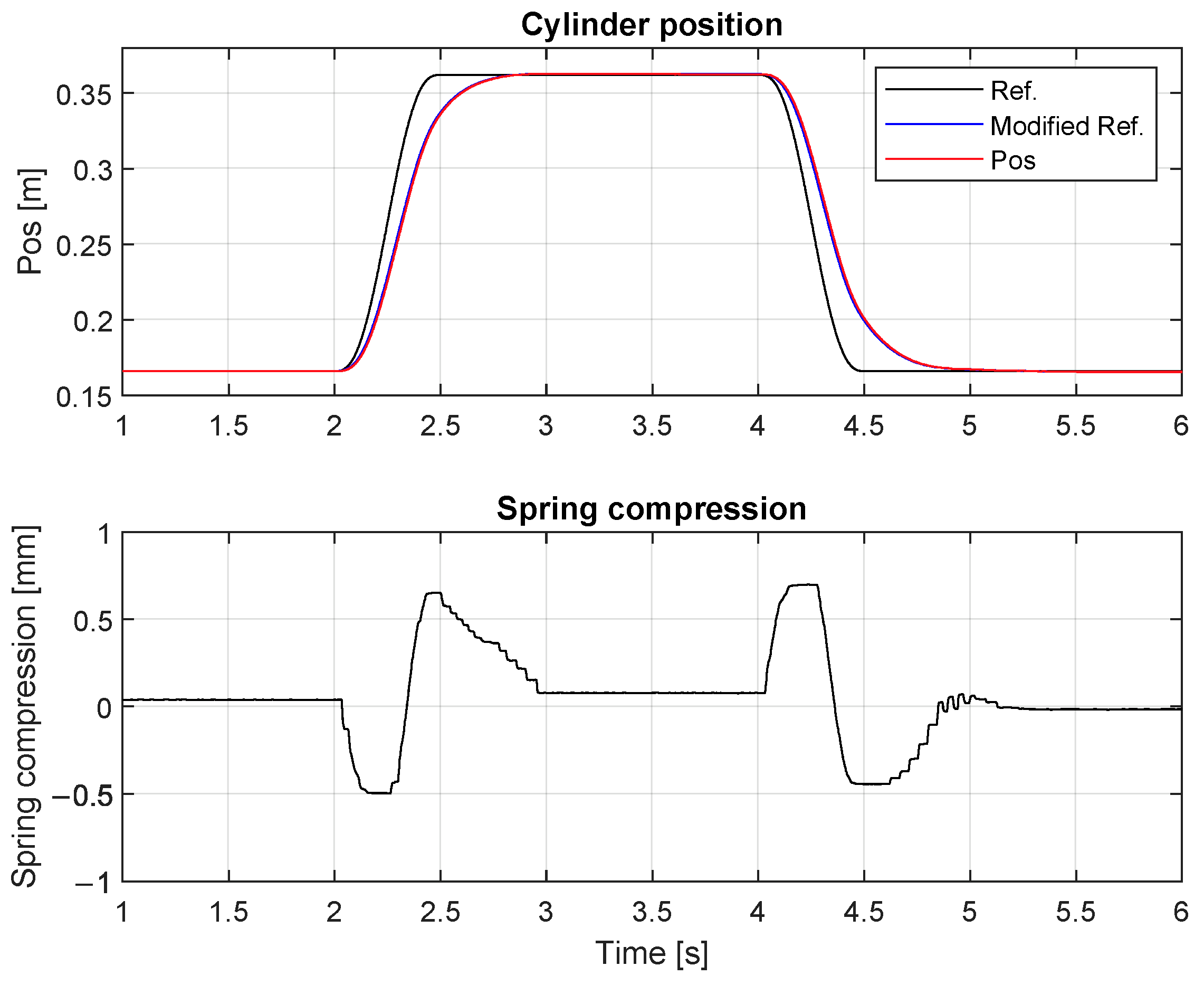
4.1. HSEA in a Free-Space Motion
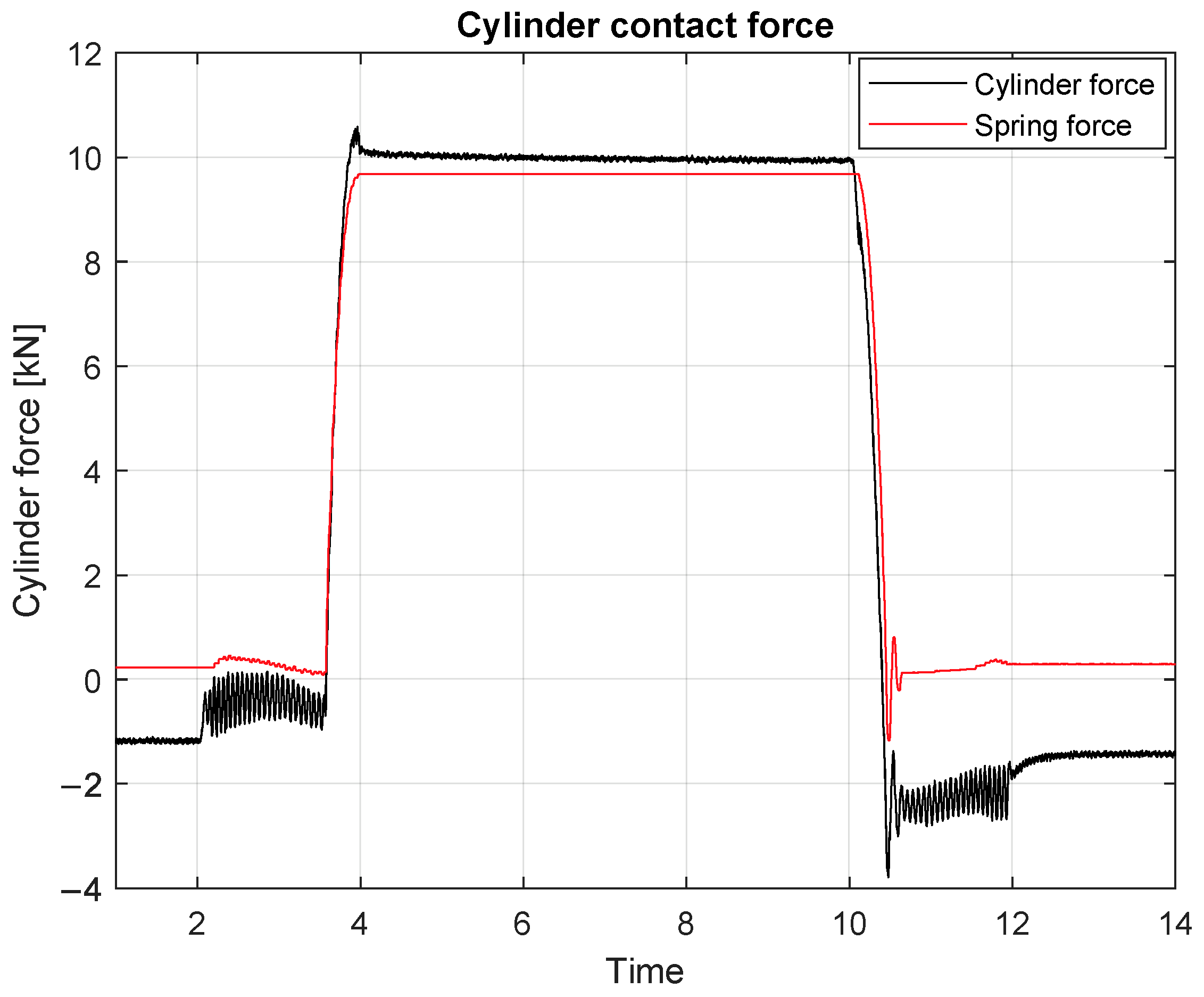
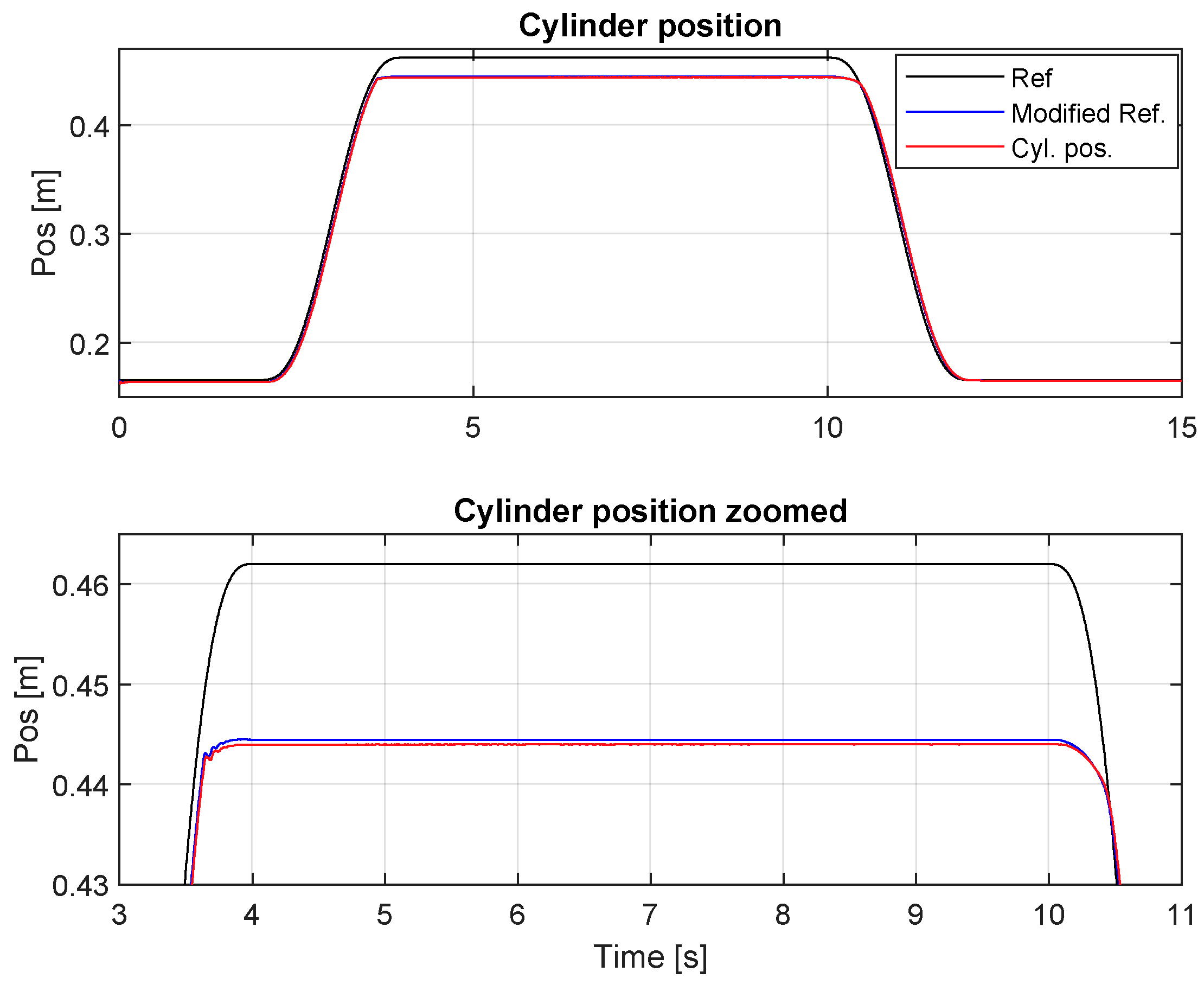
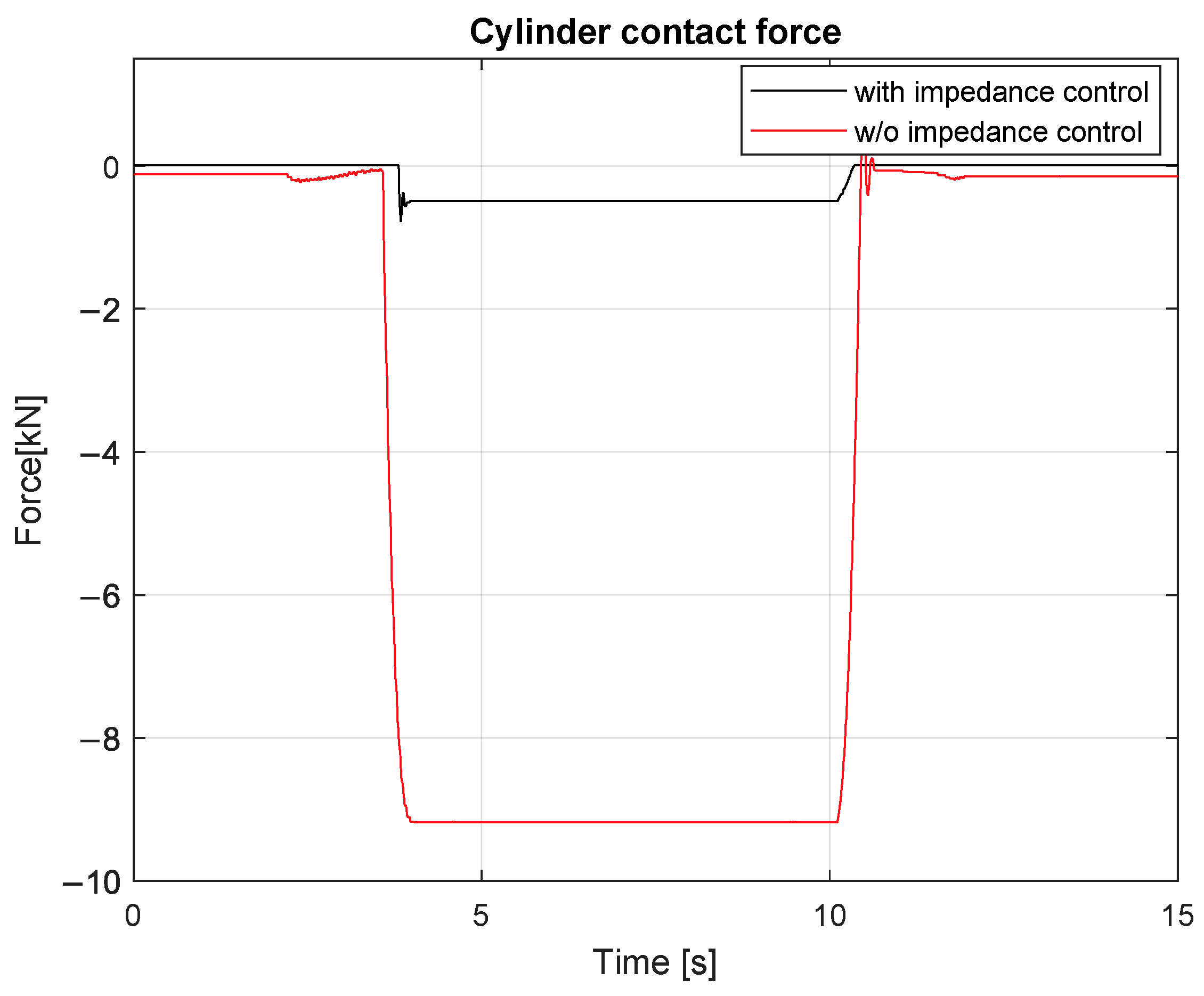
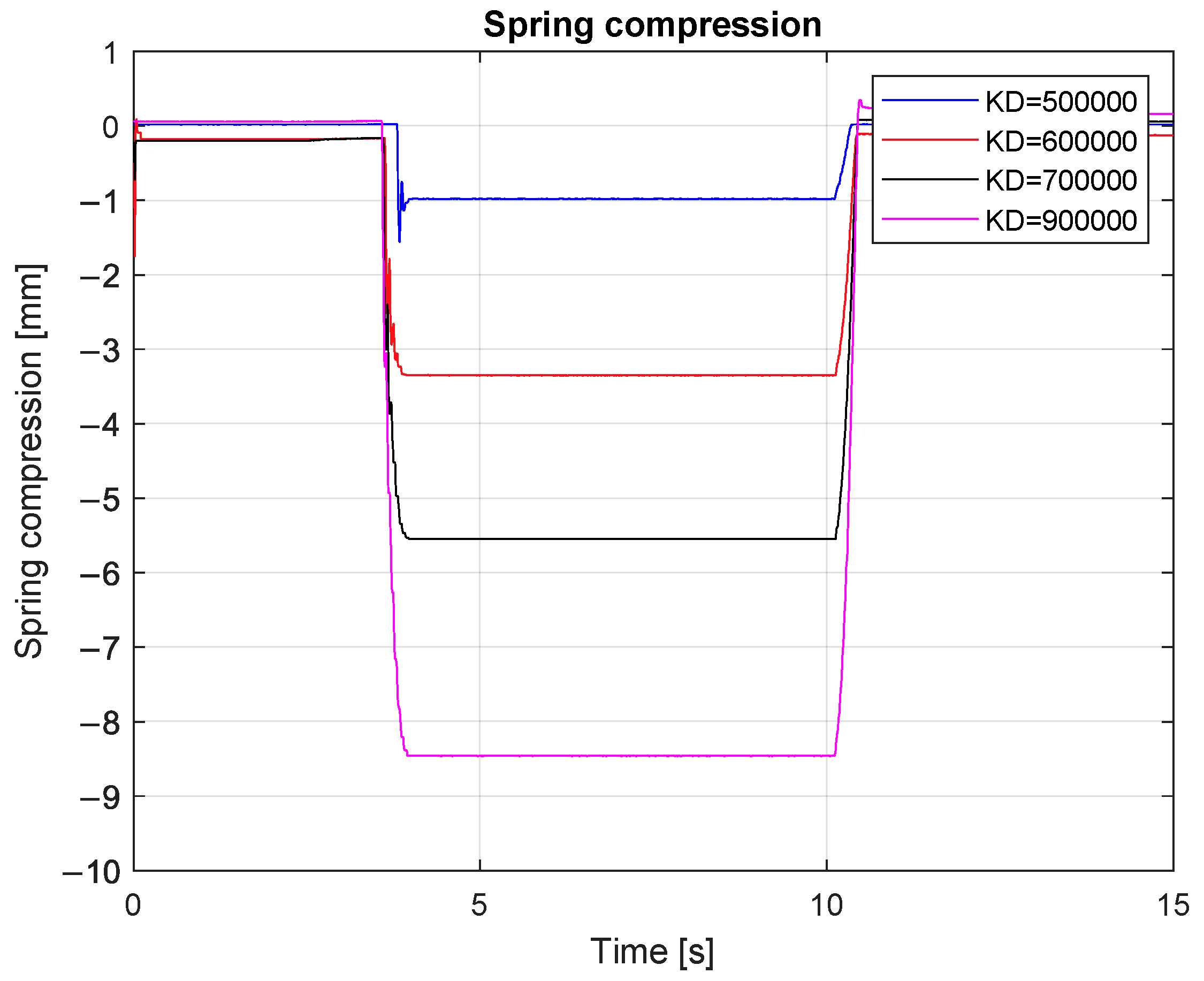
4.2. HSEA in a Contact Impedance Control Motion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| SEA | Series Elastic Actuator |
| HSEA | Hydraulic Series Elastic Actuator |
| DOF | Degrees of Freedom |
| Cylinder area (m2) | |
| Half of the total cylinder volume (m3) | |
| Cylinder length (m) | |
| Cylinder velocity (m/s) | |
| Cylinder diameter (m) | |
| Cylinder piston diameter (m) | |
| Load mass (kg) | |
| Cylinder stroke (m) | |
| Cylinder bulk modulus (MPa) | |
| Viscous damping coefficients of load (N/m/s) | |
| Spool position of the hydraulic valve (m) | |
| Servo-valve flow gain (m2/s) | |
| Valve flow-pressure gain (m5/Ns) | |
| Total leakage coefficient of a cylinder m5/(Ns) | |
| Cylinder A chamber pressure (MPa) | |
| Cylinder B chamber pressure (MPa) | |
| Cylinder chambers pressure difference (MPa) | |
| Load contact force (N) | |
| Cylinder mass (kg) | |
| Total leakage coefficient of a piston m5/(Ns) | |
| Viscous damping coefficients of piston (N/m/s) | |
| Spring compression (m) | |
| Load position (m) | |
| Desired position for load (m) | |
| Load velocity (m/s) | |
| System total spring stiffness (N/m) | |
| Hydraulic system spring stiffness (N/m) | |
| Spring stiffness (N/m) | |
| Relation between a suitable position reference related to force error | |
| Desired contact force (N) | |
| Contact force (N) | |
| u | Valve control voltage (V) |
| Mass matrix | |
| Damping matrix | |
| Stiffness matrix | |
| Natural frequency of the system (rad/s) | |
| Damping factor |
References
- Albu-Schäffer, A.; Ott, C.; Hirzinger, G. A unified passivity-based control framework for position, torque and impedance control of flexible joint robots. Int. J. Robot. Res. 2007, 26, 23–39. [Google Scholar] [CrossRef]
- Loughlin, C.; Albu-Schäffer, A.; Haddadin, S.; Ott, C.; Stemmer, A.; Wimböck, T.; Hirzinger, G. The DLR lightweight robot: Design and control concepts for robots in human environments. Ind. Robot. Int. J. 2007, 34, 376–385. [Google Scholar] [CrossRef] [Green Version]
- Albu-Schaffer, A.; Ott, C.; Frese, U.; Hirzinger, G. Cartesian impedance control of redundant robots: Recent results with the DLR-light-weight-arms. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 3704–3709. [Google Scholar] [CrossRef]
- Chen, T.; Casas, R.; Lum, P.S. An Elbow Exoskeleton for Upper Limb Rehabilitation with Series Elastic Actuator and Cable-Driven Differential. IEEE Trans. Robot. 2019, 35, 1464–1474. [Google Scholar] [CrossRef] [PubMed]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems, Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; Volume 1, pp. 399–406. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.; Knabe, C.; Orekhov, V.; Hong, D. Design of a human-like range of motion hip joint for humanoid robots. In Proceedings of the ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Buffalo, NY, USA, 17–20 August 2014. [Google Scholar] [CrossRef] [Green Version]
- Budolak, D.; Ben-Tzvi, P. Series elastic actuation for improved transparency in time delayed haptic teleoperation. Mechatronics 2019, 63, 102278. [Google Scholar] [CrossRef]
- Robinson, D.W.; Pratt, J.E.; Paluska, D.J.; Pratt, G.A. Series elastic actuator development for a biomimetic walking robot. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No. 99TH8399), Atlanta, GA, USA, 19–23 September 1999; pp. 561–568. [Google Scholar] [CrossRef]
- Pratt, J.; Krupp, B.; Morse, C. Series elastic actuators for high fidelity force control. Ind. Robot. Int. J. 2002, 29, 234–241. [Google Scholar] [CrossRef]
- Pratt, J.E.; Krupp, B.T. Series elastic actuators for legged robots. In Proceedings of the Unmanned Ground Vehicle Technology VI, International Society for Optics and Photonics, Orlando, FL, USA, 13–15 April 2014; Volume 5422, pp. 135–144. [Google Scholar] [CrossRef]
- Kaminaga, H.; Otsuki, S.; Nakamura, Y. Development of high-power and backdrivable linear electro-hydrostatic actuator. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Atlanta, GA, USA, 18–20 November 2014; pp. 973–978. [Google Scholar] [CrossRef]
- Oh, S.; Kong, K. High-precision robust force control of a series elastic actuator. IEEE/ASME Trans. Mechatron. 2016, 22, 71–80. [Google Scholar] [CrossRef]
- Zhao, Y.; Paine, N.; Jorgensen, S.J.; Sentis, L. Impedance control and performance measure of series elastic actuators. IEEE Trans. Ind. Electron. 2017, 65, 2817–2827. [Google Scholar] [CrossRef]
- Calanca, A.; Fiorini, P. Understanding environment-adaptive force control of series elastic actuators. IEEE/ASME Trans. Mechatron. 2018, 23, 413–423. [Google Scholar] [CrossRef]
- Robinson, D.W.; Pratt, G.A. Force controllable hydro-elastic actuator. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1321–1327. [Google Scholar] [CrossRef]
- Paine, N.; Oh, S.; Sentis, L. Design and control considerations for high-performance series elastic actuators. IEEE/ASME Trans. Mechatron. 2013, 19, 1080–1091. [Google Scholar] [CrossRef] [Green Version]
- Mattila, J.; Koivumäki, J.; Caldwell, D.G.; Semini, C. A survey on control of hydraulic robotic manipulators with projection to future trends. IEEE/ASME Trans. Mechatron. 2017, 22, 669–680. [Google Scholar] [CrossRef]
- Cao, X.; Aref, M.M.; Mattila, J. Design and Control of a Flexible Joint as a Hydraulic Series Elastic Actuator for Manipulation Applications. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019; pp. 553–558. [Google Scholar] [CrossRef]
- Zhong, H.; Li, X.; Gao, L.; Dong, H. Position Control of Hydraulic Series Elastic Actuator with Parameter Self-Optimization. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 42–46. [Google Scholar] [CrossRef]
- Zhong, H.; Li, X.; Gao, L. Adaptive Delay Compensation for Admittance Control of Hydraulic Series Elastic Actuator. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 384–389. [Google Scholar] [CrossRef]
- Zhong, H.; Li, X.; Gao, L.; Dong, H. Development of Admittance Control Method with Parameter Self-optimization for Hydraulic Series Elastic Actuator. Int. J. Control Autom. Syst. 2021, 19, 2357–2372. [Google Scholar] [CrossRef]
- Sciavicco, L.; Siciliano, B. Modelling and Control of Robot Manipulators; Springer Science & Business Media: London, UK, 2012. [Google Scholar] [CrossRef]
- Kaixin, S.; Cong, Z.; YueHua, C.; Jing, W.; Qing, W.; HongXu, M. Impedance control of hydraulic series elastic actuation. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 2393–2398. [Google Scholar] [CrossRef]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems; Pearson: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Mustalahti, P.; Mattila, J. Impedance Control of Hydraulic Series Elastic Actuator with a Model-Based Control Design. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 966–971. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value |
|---|---|
| 32 × m | |
| 18 × m | |
| 200 kg | |
| 0.4 m | |
| 900 MPa | |
| 2 kg | |
| 1.16 m5/Ns | |
| m2/s | |
| m5/Ns |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mustalahti, P.; Mattila, J. Position-Based Impedance Control Design for a Hydraulically Actuated Series Elastic Actuator. Energies 2022, 15, 2503. https://doi.org/10.3390/en15072503
Mustalahti P, Mattila J. Position-Based Impedance Control Design for a Hydraulically Actuated Series Elastic Actuator. Energies. 2022; 15(7):2503. https://doi.org/10.3390/en15072503
Chicago/Turabian StyleMustalahti, Pauli, and Jouni Mattila. 2022. "Position-Based Impedance Control Design for a Hydraulically Actuated Series Elastic Actuator" Energies 15, no. 7: 2503. https://doi.org/10.3390/en15072503
APA StyleMustalahti, P., & Mattila, J. (2022). Position-Based Impedance Control Design for a Hydraulically Actuated Series Elastic Actuator. Energies, 15(7), 2503. https://doi.org/10.3390/en15072503