
A Type-2 Fuzzy Controller to Enable the EFR Service from a Battery Energy Storage System

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
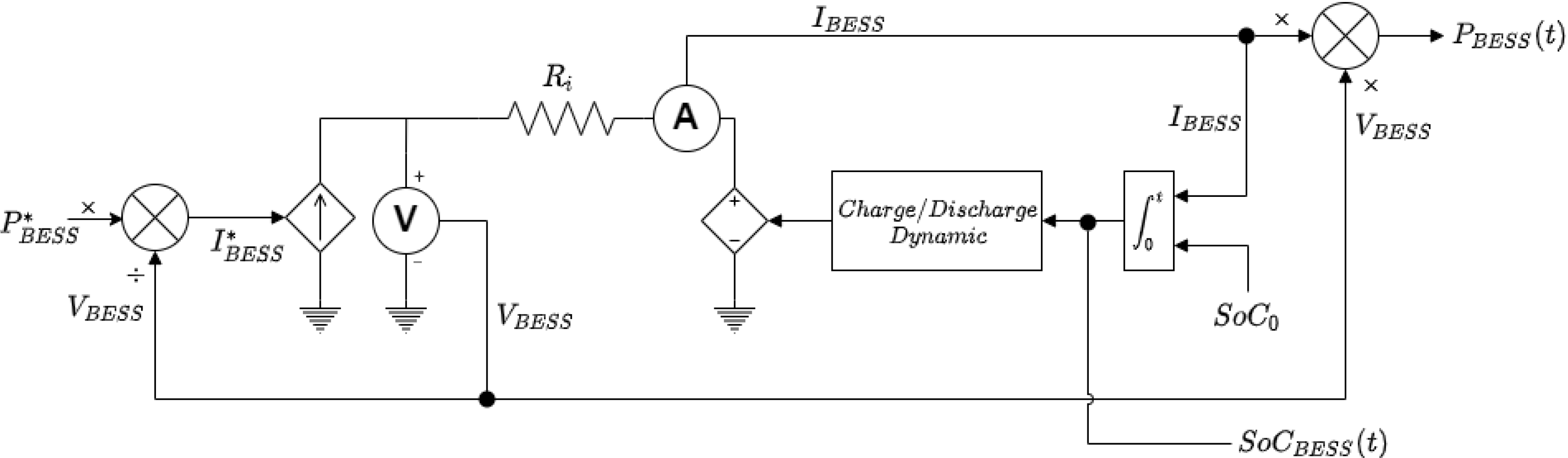
2.1. Battery Energy Storage System Modelling
2.2. Enhanced Frequency Response (EFR)
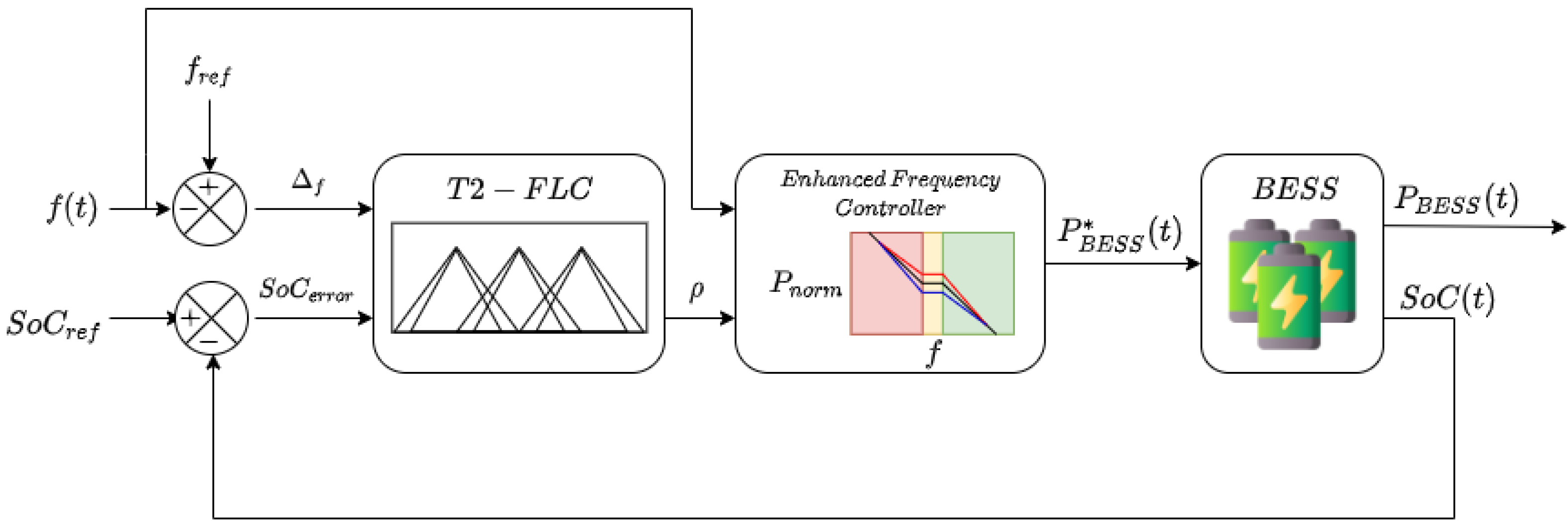
2.3. State of Charge Management: Type-2 Fuzzy Logic Controller (T2-FLC)
- Fuzzification: The system frequency deviation and the BESS state of charge error are the numerical inputs. Those variables are transformed into linguistic variables associated with membership functions (MFs). In this particular case, triangular MFs are selected since they are intuitive and straightforward to design and modify according to requirements.For this case, the membership functions representing the “zero deviation” (Z) are narrower than the other MFs only for both inputs. On the other hand, the “Positive” (P) and “Large Positive” (LP) variables require different control actions, but a higher amplitude can be chosen with adequate results for this application. The same is true for the “Negative” (N) and “Large Negative” (LN) MFs. It is important to highlight that these linguistic variables were given to all inputs and outputs to keep a coherent framework.Unlike conventional FLC, fuzzification of these variables requires primary (or conventional) and secondary variables to create the footprint of uncertainty (FOU) needed to add variability and robustness to these Type-2 MFs. For this case, the two secondary variables present the same degree of membership (or scale) of the primary ones, but with a 30% reduction of their area (base).
- Inference: In this process, the MFs from the previous step are combined with a rule base from the process expert knowledge as presented in Table 2 in order to produce a conclusion. It is important to highlight that for this paper, a Mamdani type fuzzy inference system was used. Therefore, this conclusion corresponds to a fuzzy output (according to each controller, i.e., standard fuzzy output for the conventional FLC and type 2 for the proposed T2-FLC) that requires defuzzification.This stage is exactly the same for both conventional and type-2 fuzzy logic controllers, due to both using the same rule base. However, the inference output of the controllers requires a different defuzzification process.
- Defuzzification: Finally, at this stage the inference output is transformed back into a numerical output using the related membership functions (with similar ranges, shapes and slopes), which in this case corresponds to the control reference . As in the case of fuzzification, the output variable also requires primary and secondary MFs for the required FOU (same degree and type of membership of the primary variables, but also with a 30% area reduction). Moreover, in order to adapt to any dynamic system, Type-2 FLCs feature a type reducer (for this case, a Centroid type-reduction [35]) at this stage to deliver conventional outputs.
3. Results and Discussion
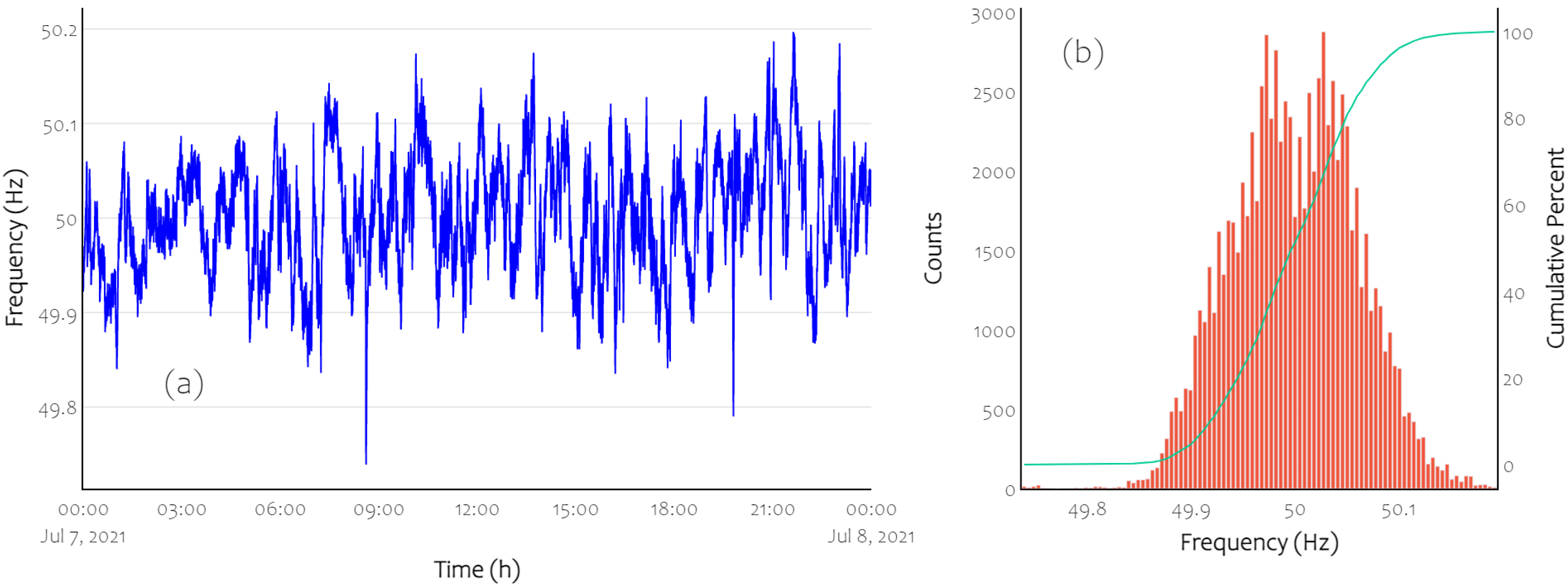
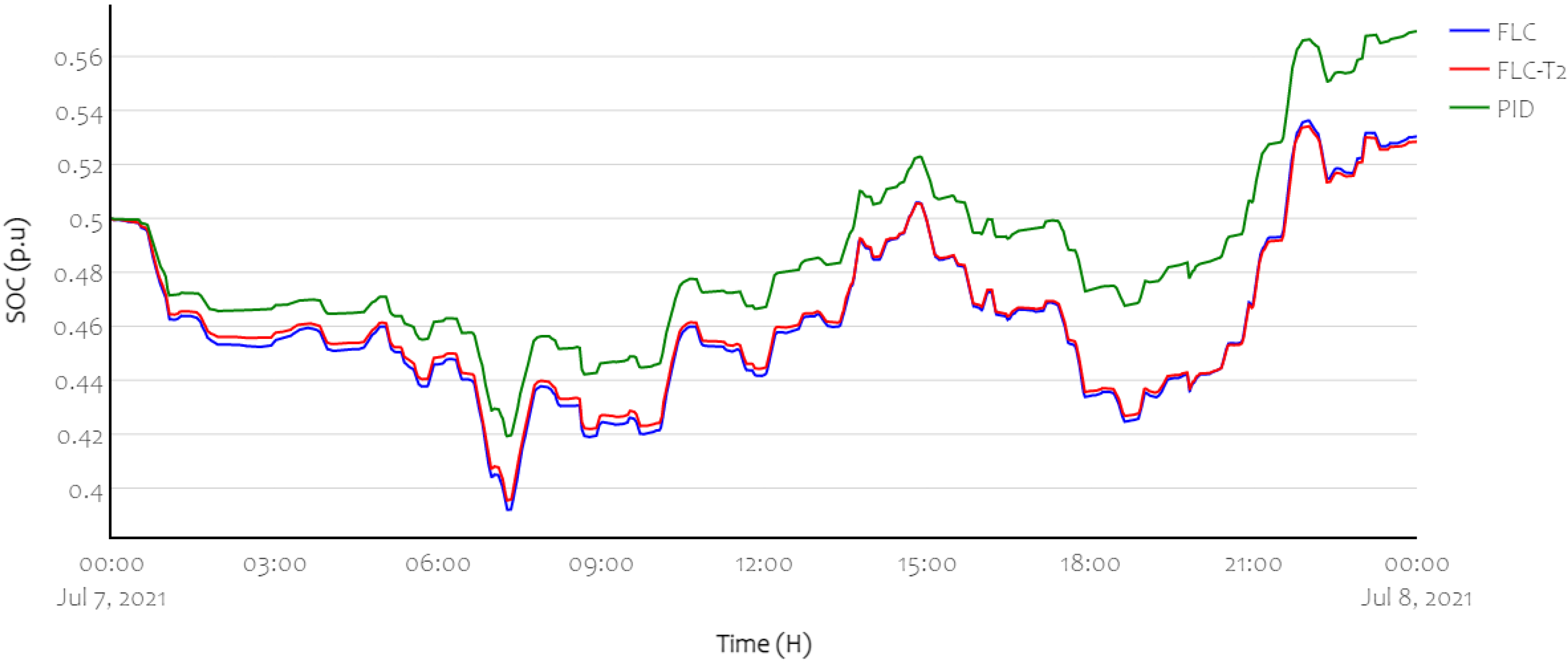
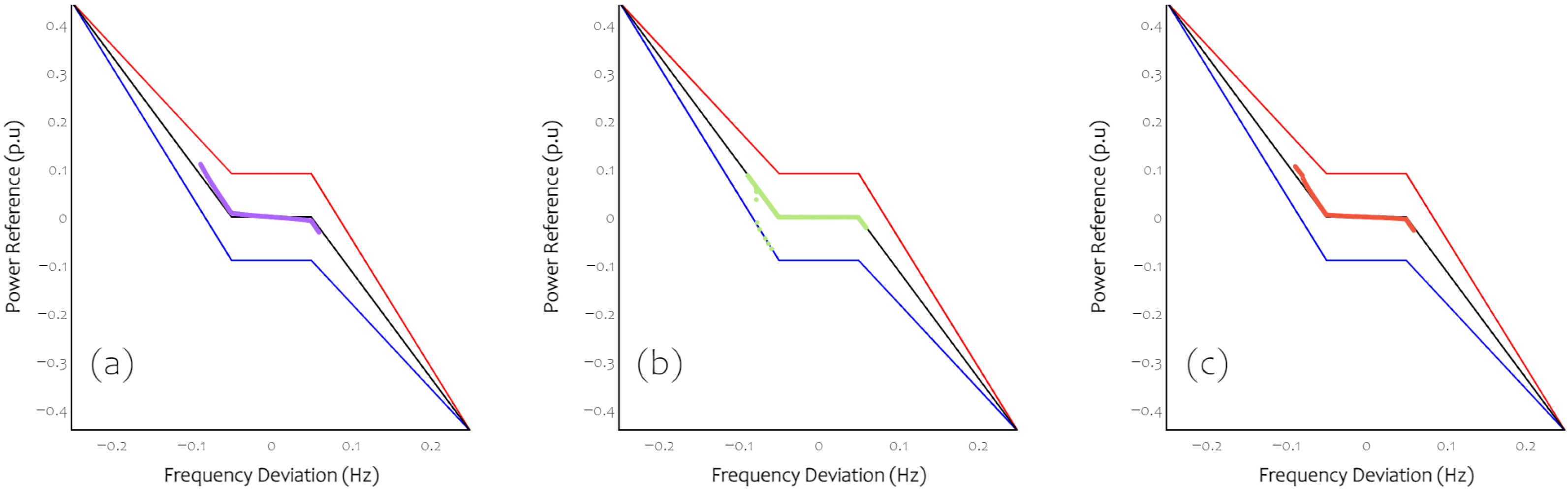
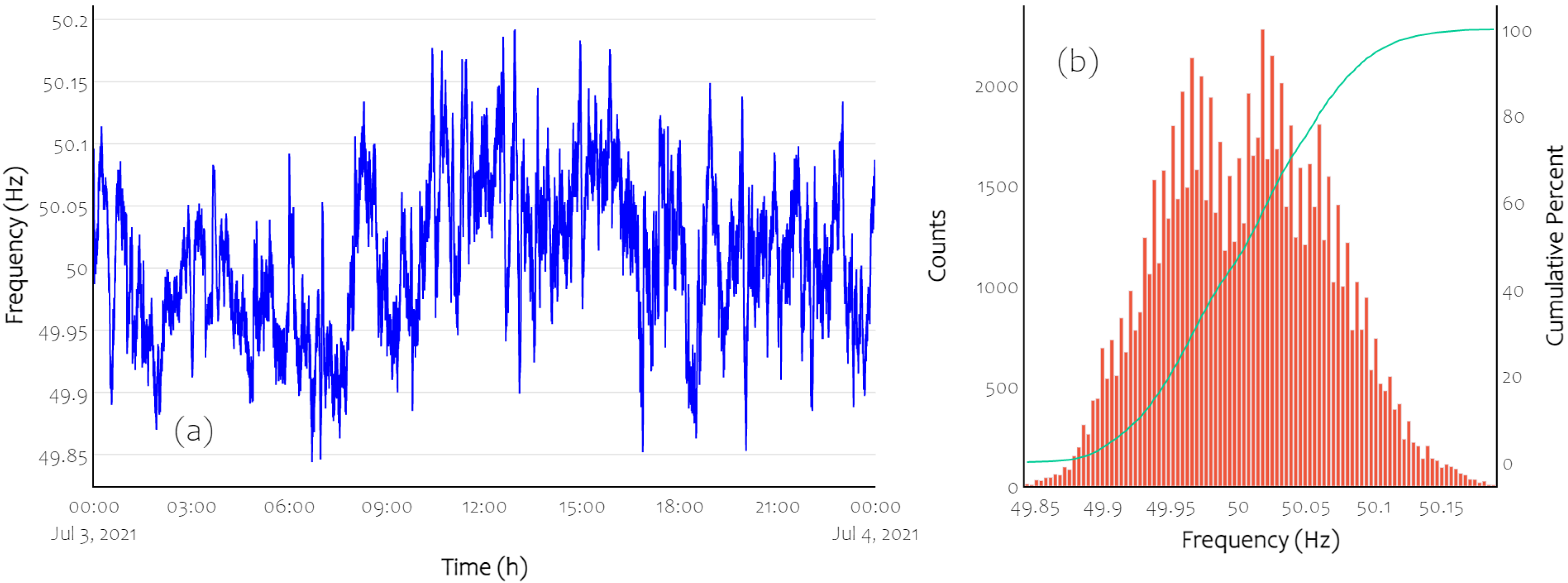
3.1. Scenario 1: Frequency Deviation on Working Days
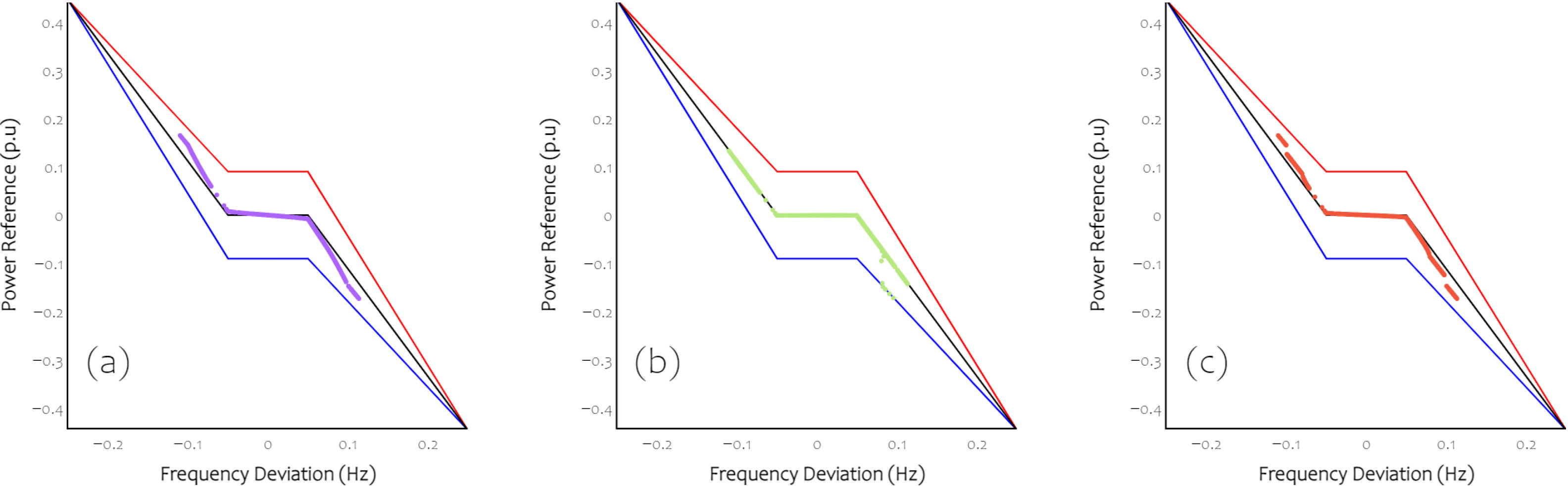
3.2. Scenario 2: Frequency Deviation on Weekend
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FLC | Fuzzy Logic Controller |
| GB | Great Britain |
| EESS | Electric Energy Storage System |
| EFR | Enhanced Frequency Response |
| FOU | Footprint of Uncertainty |
| NG | National Grid plc |
| NB | Narrow band service for frequency response |
| SoC | State of Charge |
| SPM | Service Performance Measure |
| TSO | Transmission System Operator |
| T2-FLC | Type-2 Fuzzy Logic Controller |
| WB | Wide band service for frequency response |
References
- An, H.; Yang, J.; Yang, W.; Cheng, Y.; Peng, Y. An Improved Frequency Dead Zone with Feed-Forward Control for Hydropower Units: Performance Evaluation of Primary Frequency Control. Energies 2019, 12, 1497. [Google Scholar] [CrossRef] [Green Version]
- Greenwood, D.; Lim, K.; Patsios, C.; Lyons, P.; Lim, Y.; Taylor, P. Frequency response services designed for energy storage. Appl. Energy 2017, 203, 115–127. [Google Scholar] [CrossRef]
- Weedy, B.M.; Cory, B.J.; Jenkins, N.; Ekanayake, J.B.; Strbac, G. Electric power systems; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Ashton, P.M.; Saunders, C.S.; Taylor, G.A.; Carter, A.M.; Bradley, M.E. Inertia estimation of the GB power system using synchrophasor measurements. IEEE Trans. Power Syst. 2014, 30, 701–709. [Google Scholar]
- Ulbig, A.; Borsche, T.S.; Andersson, G. Impact of low rotational inertia on power system stability and operation. IFAC Proc. Vol. 2014, 47, 7290–7297. [Google Scholar]
- National Grid ESO. Enhanced Frequency Response. 2022. Available online: https://www.nationalgrid.com/uk/electricity/balancingservices/frequency-response-services/enhanced-frequency-response-efr?overview (accessed on 13 January 2022).
- Reihani, E.; Sepasi, S.; Roose, L.R.; Matsuura, M. Energy management at the distribution grid using a Battery Energy Storage System (BESS). Int. J. Electr. Power Energy Syst. 2016, 77, 337–344. [Google Scholar]
- Stroe, D.I.; Knap, V.; Swierczynski, M.; Stroe, A.I.; Teodorescu, R. Operation of a Grid-Connected Lithium-Ion Battery Energy Storage System for Primary Frequency Regulation: A Battery Lifetime Perspective. IEEE Trans. Ind. Appl. 2017, 53, 430–438. [Google Scholar] [CrossRef]
- Gatta, F.M.; Geri, A.; Lamedica, R.; Lauria, S.; Maccioni, M.; Palone, F.; Rebolini, M.; Ruvio, A. Application of a LiFePO4 Battery Energy Storage System to Primary Frequency Control: Simulations and Experimental Results. Energies 2016, 9, 887. [Google Scholar] [CrossRef] [Green Version]
- Stroe, D.I.; Knap, V.; Swierczynski, M.; Stroe, A.I.; Teodorescu, R. Suggested operation of grid-connected lithium-ion battery energy storage system for primary frequency regulation: Lifetime perspective. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1105–1111. [Google Scholar]
- Sánchez, F.; Gonzalez-Longatt, F.; Rodríguez, A.; Rueda, J.L. Dynamic data-driven SoC control of BESS for provision of fast frequency response services. In Proceedings of the 2019 IEEE Power &Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Zhang, F.; Tokombayev, M.; Song, Y.; Gross, G. Effective flywheel energy storage (FES) offer strategies for frequency regulation service provision. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–7. [Google Scholar]
- Sanchez, F.; Cayenne, J.; Gonzalez-Longatt, F.; Rueda, J.L. Controller to enable the enhanced frequency response services from a multi-electrical energy storage system. IET Gener. Transm. Distrib. 2019, 13, 258–265. [Google Scholar]
- Sami, S.S.; Cheng, M.; Wu, J. Modelling and control of multi-type grid-scale energy storage for power system frequency response. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 269–273. [Google Scholar]
- Pozo, D.; Contreras, J.; Sauma, E.E. Unit commitment with ideal and generic energy storage units. IEEE Trans. Power Syst. 2014, 29, 2974–2984. [Google Scholar]
- Mohamed, F.A.; Koivo, H.N. System modelling and online optimal management of microgrid with battery storage. In Proceedings of the 6th International Conference on Renewable Energies and Power Quality (ICREPQ’07), Seville, Spain, 29–30 March 2007; pp. 26–28. [Google Scholar]
- Jamaica-Obregón, J.; Moreno-Chuquen, R.; Florez-Cediel, O.D. Optimal operation of grid-connected microgrids with photovoltaic generation and storage. Int. Rev. Electr. Eng. (IREE) 2021, 16, 50–59. [Google Scholar]
- Gil-González, W.; Montoya, O.D.; Grisales-Noreña, L.F.; Cruz-Peragón, F.; Alcalá, G. Economic dispatch of renewable generators and BESS in DC microgrids using second-order cone optimization. Energies 2020, 13, 1703. [Google Scholar]
- Martinez, J.S.; John, R.I.; Hissel, D.; Péra, M.C. A survey-based type-2 fuzzy logic system for energy management in hybrid electrical vehicles. Inf. Sci. 2012, 190, 192–207. [Google Scholar]
- Nechadi, E.; Harmas, M.; Hamzaoui, A.; Essounbouli, N. Type-2 fuzzy based adaptive synergetic power system control. Electr. Power Syst. Res. 2012, 88, 9–15. [Google Scholar]
- Solano Martínez, J.; Mulot, J.; Harel, F.; Hissel, D.; Péra, M.C.; John, R.I.; Amiet, M. Experimental validation of a type-2 fuzzy logic controller for energy management in hybrid electrical vehicles. Eng. Appl. Artif. Intell. 2013, 26, 1772–1779. [Google Scholar] [CrossRef]
- Moghadam, H.; Mohammadzadeh, A.; Vafaie, R.; Tavoosi, J.; Khooban, M. A type-2 fuzzy control for active/reactive power control and energy storage management. Trans. Inst. Meas. Control. 2021, 44, 1014–1028. [Google Scholar] [CrossRef]
- Lin, T.C. Observer-based robust adaptive interval type-2 fuzzy tracking control of multivariable nonlinear systems. Eng. Appl. Artif. Intell. 2010, 23, 386–399. [Google Scholar]
- Al-Khazraji, A.; Essounbouli, N.; Hamzaoui, A.; Nollet, F.; Zaytoon, J. Type-2 fuzzy sliding mode control without reaching phase for nonlinear system. Eng. Appl. Artif. Intell. 2011, 24, 23–38. [Google Scholar]
- Deivanayagampillai, N. A Review on Type-2 Fuzzy Controller on Control System. J. Adv. Res. Dyn. Control. Syst. 2018, 10, 430–435. [Google Scholar]
- Lou, C.W.; Dong, M.C. Modeling data uncertainty on electric load forecasting based on Type-2 fuzzy logic set theory. Eng. Appl. Artif. Intell. 2012, 25, 1567–1576. [Google Scholar]
- Oztaysi, B.; Onar, S.Ç.; Bolturk, E.; Kahraman, C. Fuzzy Forecasting Methods for Energy Planning. In Studies in Systems, Decision and Control; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 65–81. [Google Scholar] [CrossRef]
- Guo, N.; Fang, Y.; Tian, Z.; Cao, S. Research on SOC fuzzy weighted algorithm based on GA-BP neural network and ampere integral method. J. Eng. 2019, 2019, 576–580. [Google Scholar]
- Gorostiza, F.S.; Gonzalez-Longatt, F.M. Deep reinforcement learning-based controller for SOC management of multi-electrical energy storage system. IEEE Trans. Smart Grid 2020, 11, 5039–5050. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl. Energy 2015, 137, 511–536. [Google Scholar]
- Cooke, A.; Strickland, D.; Forkasiewicz, K. Energy storage for enhanced frequency response services. In Proceedings of the 2017 52nd International Universities Power Engineering Conference (UPEC), Heraklion, Greece, 28–31 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cao, X.; Zhao, N. A cooperative management strategy for battery energy storage system providing Enhanced Frequency Response. Energy Rep. 2022, 8, 120–128. [Google Scholar]
- Knap, V.; Chaudhary, S.K.; Stroe, D.I.; Swierczynski, M.; Craciun, B.I.; Teodorescu, R. Sizing of an energy storage system for grid inertial response and primary frequency reserve. IEEE Trans. Power Syst. 2015, 31, 3447–3456. [Google Scholar]
- Braae, M.; Rutherford, D. Selection of parameters for a fuzzy logic controller. Fuzzy Sets Syst. 1979, 2, 185–199. [Google Scholar]
- Karnik, N.N.; Mendel, J.M. Centroid of a type-2 fuzzy set. Inf. Sci. 2001, 132, 195–220. [Google Scholar]
- The Mathworks, Inc. Natick, Massachusetts. MATLAB version 9.10.0.1602886 (R2021a). 2021. Available online: https://www.mathworks.com (accessed on 17 January 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Point | Wideband (WB) | Narrowband (NB) | ||
|---|---|---|---|---|---|
| Frequency Deviation (Hz) | Response Power (p.u.) | Frequency Deviation (Hz) | Response Power (p.u.) | ||
| Max delivery (Low Frequency) | U | −0.500 | +1.0000 | −0.500 | +1.0000 |
| Post-Fault | V | −0.250 | +0.444444 | −0.250 | +0.484536 |
| Deadband | W | −0.050 | +0.09 | −0.015 | +0.09 |
| X | +0.050 | −0.09 | +0.015 | −0.09 | |
| Pre-Fault | Y | +0.250 | −0.444444 | +0.250 | −0.484536 |
| Max delivery (High Frequency) | Z | +0.500 | −1.0000 | +0.500 | −1.0000 |
| Frequency Deviation, | ||||||
|---|---|---|---|---|---|---|
| LN | N | Z | P | LP | ||
| LN | LP | LP | P | P | P | |
| SoC error | N | LP | P | P | P | P |
| Z | Z | Z | Z | Z | Z | |
| P | N | N | N | N | LN | |
| LP | N | N | N | LN | LN | |
| Scenario | Indicator | PID | FLC | T2-FLC |
|---|---|---|---|---|
| Working day | 0.5 | 0.5 | 0.5 | |
| 0.5 | 0.5 | 0.5 | ||
| 0.569 | 0.536 | 0.522 | ||
| E (MWh) | −9.45 | −4.29 | −4.01 | |
| (%) | 100 | 100 | 100 | |
| Weekend | 0.5 | 0.5 | 0.5 | |
| 0.5 | 0.5 | 0.5 | ||
| 0.701 | 0.685 | 0.671 | ||
| E (MWh) | −27.64 | −25.35 | −24.95 | |
| (%) | 100 | 100 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cantillo-Luna, S.; Moreno-Chuquen, R.; Gonzalez-Longatt, F.; Chamorro, H.R. A Type-2 Fuzzy Controller to Enable the EFR Service from a Battery Energy Storage System. Energies 2022, 15, 2389. https://doi.org/10.3390/en15072389
Cantillo-Luna S, Moreno-Chuquen R, Gonzalez-Longatt F, Chamorro HR. A Type-2 Fuzzy Controller to Enable the EFR Service from a Battery Energy Storage System. Energies. 2022; 15(7):2389. https://doi.org/10.3390/en15072389
Chicago/Turabian StyleCantillo-Luna, Sergio, Ricardo Moreno-Chuquen, Francisco Gonzalez-Longatt, and Harold R. Chamorro. 2022. "A Type-2 Fuzzy Controller to Enable the EFR Service from a Battery Energy Storage System" Energies 15, no. 7: 2389. https://doi.org/10.3390/en15072389
APA StyleCantillo-Luna, S., Moreno-Chuquen, R., Gonzalez-Longatt, F., & Chamorro, H. R. (2022). A Type-2 Fuzzy Controller to Enable the EFR Service from a Battery Energy Storage System. Energies, 15(7), 2389. https://doi.org/10.3390/en15072389