
LPSRS: Low-Power Multi-Hop Synchronization Based on Reference Node Scheduling for Internet of Things



Abstract
1. Introduction
2. Related Work
- (1)
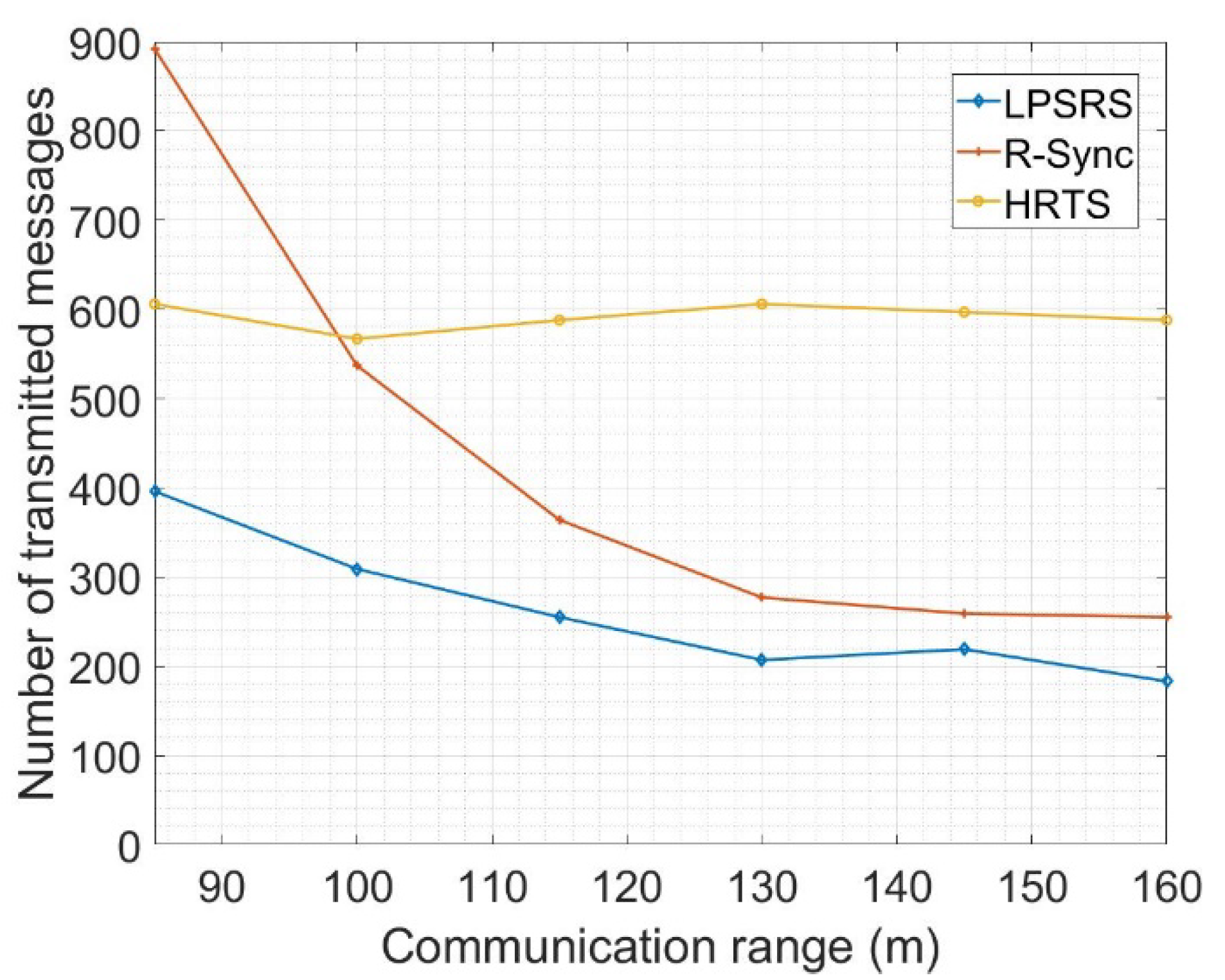
- LPSRS substantially reduces transmission overhead (number of transmitted messages), thereby lowering power consumption.
- (2)
- LPSRS utilizes a scheduling approach to address the collision issue, which can reduce power consumption.
- (3)
- LPSRS is constructed into a real wireless sensor network with different configurations and an extensive simulation with large-scale networks.
3. Preliminaries
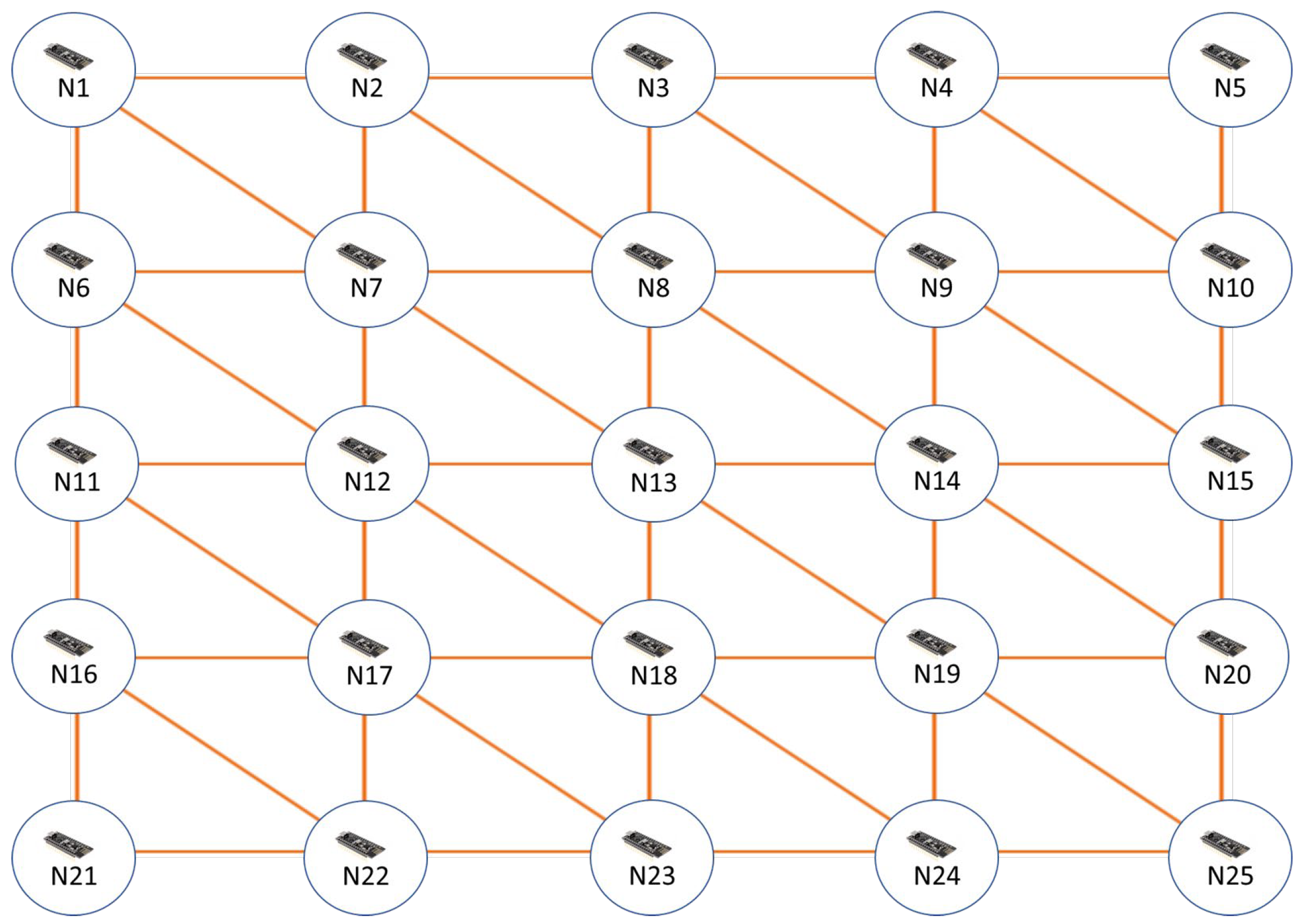
3.1. System Model
3.2. Message Format
- (1)
- DestAddr: a destination address of the message.
- (2)
- MesN: a number of split messages of the scheduling message. Its default value is 1.
- (3)
- SrcID: a unique identifier of the sender.
- (4)
- Type: the type of message is Sch (i.e., scheduling message).
- (5)
- RefNodes: list of reference nodes.
- (6)
- SchSlots: list of scheduled time slots.
- (7)
- SeqN: sequence number of the scheduling messages. Its default value is 0.
- (1)
- DestAddr: the destination address of the message.
- (2)
- SrcID: the unique identifier of the sender.
- (3)
- SID: specified reference node. Its default value is −1.
- (4)
- Type: the type of messages, including , , and .
- (5)
- SeqN: sequence number of the synchronization messages. Its default value is 0.
- (6)
- RT: the timestamp at the moment of receiving . Its default value is −1.
- (7)
- TS: the timestamp at the moment of sending . Its default value is −1.
- (8)
- RefT: the timestamp of the reference time when receiving . Its default value is −1.
- (9)
- OF: the offset value when sending . Its default value is 0.
4. LPSRS Algorithm
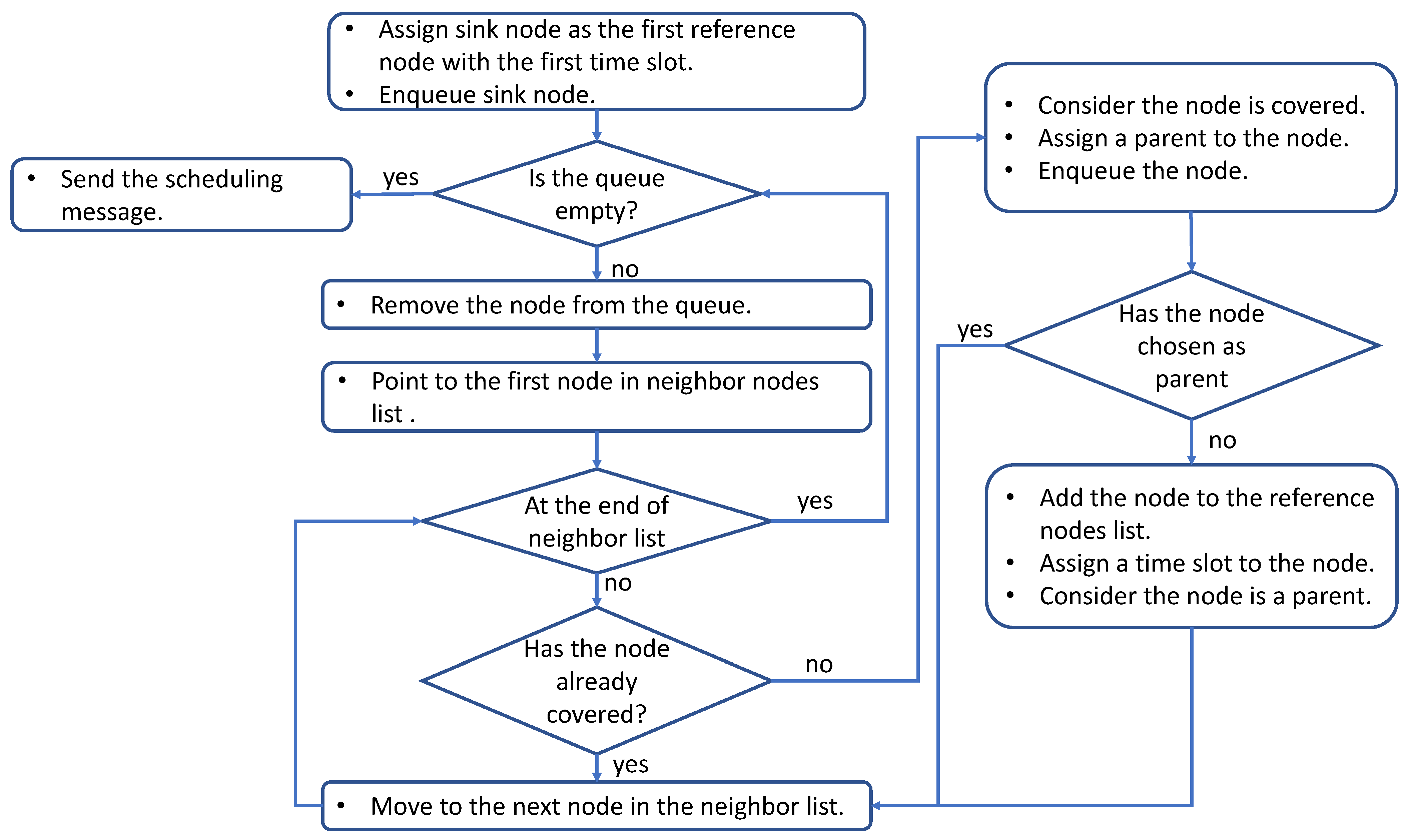
4.1. Scheduling Process
| Algorithm 1: LPSRS pseudo-code for the scheduling process (sink node only). | |
| 1. | |
| 2. | |
| 3. | |
| 4. | |
| 5. | |
| 6. | whiledo |
| 7. | current i ← dequeue(Q); // Remove i form queue |
| 8. | for (every edge (i, j) ∈ E) do |
| 9. | if Then |
| 10. | |
| 11. | |
| 12. | |
| 13. | if Then |
| 14. | |
| 15. | |
| 16. | |
| 17. | cnt ← cnt + 1 |
| 18. | end if |
| 19. | end if |
| 20. | end for |
| 21. | end while |
| 22. | send scheduling message <0xFFFF, s, Sch, MesN, RefNodes, SchSlots, SeqN> |
| Algorithm 2: LPSRS pseudo-code for the scheduling process (all nodes). | |
| , , | |
| 1. | ∎ Upon receiving Scheduling Message |
| 2. | |
| 3. | list |
| 4. | end if |
| 5. | |
| 6. | |
| 7. | |
| 8. | |
| 9. | |
| 10. | end if |
| 11. | |
| 12. | |
| 13. | |
| 14. | Setup waiting timer |
| 15. | end if |
| 16. | |
| 17. | ∎ Upon WT expires |
| 18. | send scheduling message <0xFFFF, NodeID, Sch, MesN, RefNodes, SchSlos, SeqN> |

4.2. Synchronization Process



| Algorithm 3: LPSRS pseudo-code for the synchronization process. | |
| 1. | |
| 2. | |
| 3. | |
| 4. | |
| 5. | ← |
| 6. | |
| 7. | end if |
| 8. | ∎ Upon receiving |
| 9. | // represents all neighbor nodes of |
| 10. | |
| 11. | |
| 12. | |
| 13. | |
| 14. | |
| 15. | |
| 16. | Setup Synchronization timer |
| 17. | |
| 18. | ∎ Upon receiving |
| 19. | |
| 20. | |
| 21. | |
| 22. | |
| 23. | |
| 24. | ∎ Upon receiving |
| 25. | |
| 26. | |
| 27. | |
| 28. | |
| 29. | |
| 30. | ∎ Upon ST expires |
| 31. | |
| 32. | |
| 33. | |
| 34. | |
5. Experimental and Simulation Results
5.1. Power Consumption Analysis
5.2. Experimental Results
5.3. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Farzad, A.; Najafi, K. BlueSync: Time Synchronization in Bluetooth Low Energy with Energy Efficient Calculations. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Xintao, H.; Kim, K.S.; Lee, S.; Lim, E.G.; Marshall, A. Improving Multi-Hop Time Synchronization Performance in Wireless Sensor Networks Based on Packet-Relaying Gateways with Per-Hop Delay Compensation. IEEE Trans. Commun. 2021, 69, 6093–6105. [Google Scholar]
- Phan, L.-A.; Kim, T.; Kim, T. Robust neighbor-aware time synchronization protocol for wireless sensor network in dynamic and hostile environments. IEEE Internet Things J. 2020, 8, 1934–1945. [Google Scholar] [CrossRef]
- ElSharief, M.; El-Gawad, M.A.A.; Ko, H.; Pack, S. EERS: Energy-Efficient Reference Node Selection Algorithm for Synchronization in Industrial Wireless Sensor Networks. Sensors 2020, 20, 4095. [Google Scholar] [CrossRef] [PubMed]
- Sarvghadi, M.A.; Wan, T.-C. Message passing based time synchronization in wireless sensor networks: A survey. Int. J. Distrib. Sens. Netw. 2016, 12, 1280904. [Google Scholar] [CrossRef]
- Yildirim, K.S.; Kantarci, A. Time synchronization based on slow-flooding in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 244–253. [Google Scholar] [CrossRef]
- ElSharief, M.; El-Gawad, M.A.A.; Kim, H.W. Density table-based synchronization for multi-hop wireless sensor networks. IEEE Access 2017, 6, 1940–1953. [Google Scholar] [CrossRef]
- Choudhury, N.; Matam, R.; Mukherjee, M.; Shu, L. Beacon synchronization and duty-cycling in IEEE 802.15. 4 cluster-tree networks: A review. IEEE Internet Things J. 2018, 5, 1765–1788. [Google Scholar] [CrossRef]
- Qiu, T.; Zhang, Y.; Qiao, D.; Zhang, X.; Wymore, M.L.; Sangaiah, A.K. A robust time synchronization scheme for industrial internet of things. IEEE Trans. Ind. Inform. 2018, 14, 3570–3580. [Google Scholar] [CrossRef]
- Yildirim, K.S. Gradient descent algorithm inspired adaptive time synchronization in wireless sensor networks. IEEE Sens. J. 2016, 16, 5463–5470. [Google Scholar] [CrossRef]
- EMahmoud, l.; El-Gawad, M.A.A.; Kim, H. Fads: Fast scheduling and accurate drift compensation for time synchronization of wireless sensor networks. IEEE Access 2018, 6, 65507–65520. [Google Scholar]
- Hui, D.; Han, R. TSync: A lightweight bidirectional time synchronization service for wireless sensor networks. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2004, 8, 125–139. [Google Scholar]
- Miklós, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The flooding time synchronization protocol. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49. [Google Scholar]
- Lenzen, C.; Sommer, P.; Wattenhofer, R. PulseSync: An efficient and scalable clock synchronization protocol. IEEE/ACM Trans. Netw. 2015, 23, 717–727. [Google Scholar] [CrossRef]
- Lenzen, C.; Sommer, P.; Wattenhofer, R. Optimal clock synchronization in networks. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems, Berkeley, CA, USA, 4–6 November 2009; pp. 225–238. [Google Scholar]
- Yildirim, K.S.; Gurcan, O.; Yildirim, K.S. Efficient time synchronization in a wireless sensor network by adaptive value tracking. IEEE Trans. Wirel. Commun. 2014, 13, 3650–3664. [Google Scholar] [CrossRef][Green Version]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Gong, F.; Sichitiu, M.L. CESP: A low-power high-accuracy time synchronization protocol. IEEE Trans. Veh. Technol. 2016, 65, 2387–2396. [Google Scholar] [CrossRef]
- Saurabh, G.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, New York, NY, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Leandro, T.B.; Heimfarth, T.; de Freitas, E.P. Enhancing time synchronization support in wireless sensor networks. Sensors 2017, 17, 2956. [Google Scholar]
- ElSharief, M.A.; El-Gawad, M.A.A.; Kim, H.; El-Gawad, M.A. Low-Power Scheduling for Time Synchronization Protocols in a Wireless Sensor Networks. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Atis, E.; Fafoutis, X.; Duquennoy, S.; Oikonomou, G.; Piechocki, R.; Craddock, I. Temperature-resilient time synchronization for the internet of things. IEEE Trans. Ind. Inform. 2017, 14, 2241–2250. [Google Scholar]
- Luca, S.; Gamba, G. A distributed consensus protocol for clock synchronization in wireless sensor network. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Panigrahi, N.; Khilar, P. Multi-hop consensus time synchronization algorithm for sparse wireless sensor network: A distributed constraint-based dynamic programming approach. Ad Hoc Netw. 2017, 61, 124–138. [Google Scholar] [CrossRef]
- Jianshe, W.; Jiao, L.; Ding, R. Average time synchronization in wireless sensor networks by pairwise messages. Comput. Commun. 2012, 35, 221–233. [Google Scholar]
- Maggs, M.K.; O’Keefe, S.G.; Thiel, D. Consensus clock synchronization for wireless sensor networks. IEEE Sens. J. 2012, 12, 2269–2277. [Google Scholar] [CrossRef]
- Phan, L.-A.; Kim, T. Fast consensus-based time synchronization protocol using virtual topology for wireless sensor networks. IEEE Internet Things J. 2021, 8, 7485–7496. [Google Scholar] [CrossRef]
- Shi, F.; Tuo, X.; Ran, L.; Ren, Z.; Yang, S.X. Fast convergence time synchronization in wireless sensor networks based on average consensus. IEEE Trans. Ind. Inform. 2020, 16, 1120–1129. [Google Scholar] [CrossRef]
- Lim, H.; Kumar, S.; Kim, H. Density-driven scheduling of low power synchronization for wireless sensor networks. In Proceedings of the 2016 International Conference on Electronics, Information, and Communications (ICEIC), Danang, Vietnam, 27–30 January 2016. [Google Scholar]
- Ranjan, R.; Varma, S. Collision-free time synchronization for multi-hop wireless sensor networks. J. Comput. Intell. Electron. Syst. 2012, 1, 200–206. [Google Scholar] [CrossRef]
- Ranjan, R.; Varma, S. Challenges and implementation on cross layer design for wireless sensor networks. Wirel. Pers. Commun. 2016, 86, 1037–1060. [Google Scholar] [CrossRef]
- Kim, D.; Wu, Y.; Li, Y.; Zou, F.; Du, D.-Z. Constructing Minimum Connected Dominating Sets with Bounded Diameters in Wireless Networks. IEEE Trans. Parallel Distrib. Syst. 2008, 20, 147–157. [Google Scholar]
- Cormin, T.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- IEEE Std 802.15.4-2015; IEEE Standard for Low-Rate Wireless Networks. IEEE Standards Association: Piscataway, NJ, USA, 2016; Volume 802.
- NXP. MKW01Z128 Highly-Integrated, Cost-Effective Single-Package Solution for Sub-1 GHz applications. Document Number: MKW01Z128, Rev. 5,03/2014. Available online: http://www.nxp.com (accessed on 5 December 2021).
- Arduino Nano User Manual. Available online: https://www.arduino.cc/en/uploads/Main/ArduinoNanoManual23.pdf (accessed on 5 January 2022).
- nRF24L01+ Preliminary Product Specification. Available online: https://www.sparkfun.com/datasheets/Components/SMD/nRF24L01Pluss_Preliminary_Product_Specification_v1_0.pdf (accessed on 5 January 2022).
- ATmega328P [DATASHEET]. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-7810-Automotive-Microcontrollers-ATmega328P_Datasheet.pdf (accessed on 5 January 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LPSRS | R-sync | HRTS |
|---|---|---|
| 42 | 57 | 64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsharief, M.; El-Gawad, M.A.A.; Ko, H.; Pack, S. LPSRS: Low-Power Multi-Hop Synchronization Based on Reference Node Scheduling for Internet of Things. Energies 2022, 15, 2289. https://doi.org/10.3390/en15062289
Elsharief M, El-Gawad MAA, Ko H, Pack S. LPSRS: Low-Power Multi-Hop Synchronization Based on Reference Node Scheduling for Internet of Things. Energies. 2022; 15(6):2289. https://doi.org/10.3390/en15062289
Chicago/Turabian StyleElsharief, Mahmoud, Mohamed A. Abd El-Gawad, Haneul Ko, and Sangheon Pack. 2022. "LPSRS: Low-Power Multi-Hop Synchronization Based on Reference Node Scheduling for Internet of Things" Energies 15, no. 6: 2289. https://doi.org/10.3390/en15062289
APA StyleElsharief, M., El-Gawad, M. A. A., Ko, H., & Pack, S. (2022). LPSRS: Low-Power Multi-Hop Synchronization Based on Reference Node Scheduling for Internet of Things. Energies, 15(6), 2289. https://doi.org/10.3390/en15062289