
Robust Scheduling of Networked Microgrids for Economics and Resilience Improvement

 ,
, 
Abstract
:1. Introduction
1.1. Literature Review and Gap Analysis
1.2. Contributions and Outline
- 1.
- Considering the uncertainties of the occurrence time and duration of the unintentional islanding, a two-stage robust optimization for optimal scheduling of networked microgrids is proposed to guarantee local loads being served continuously through rapidly adjusting the output of committed DGs and ESSs in case of unintentional islanding.
- 2.
- The correctness and effectiveness of proposed robust optimization model are validated through various case studies. In particular, the advantages of networked microgrids over independent microgrids in terms of reducing the operating cost and improving the resilience of power supply have been verified.
- 3.
- The solution efficiency of the C&CG algorithm in large and networked microgrids has been validated.
2. Modeling
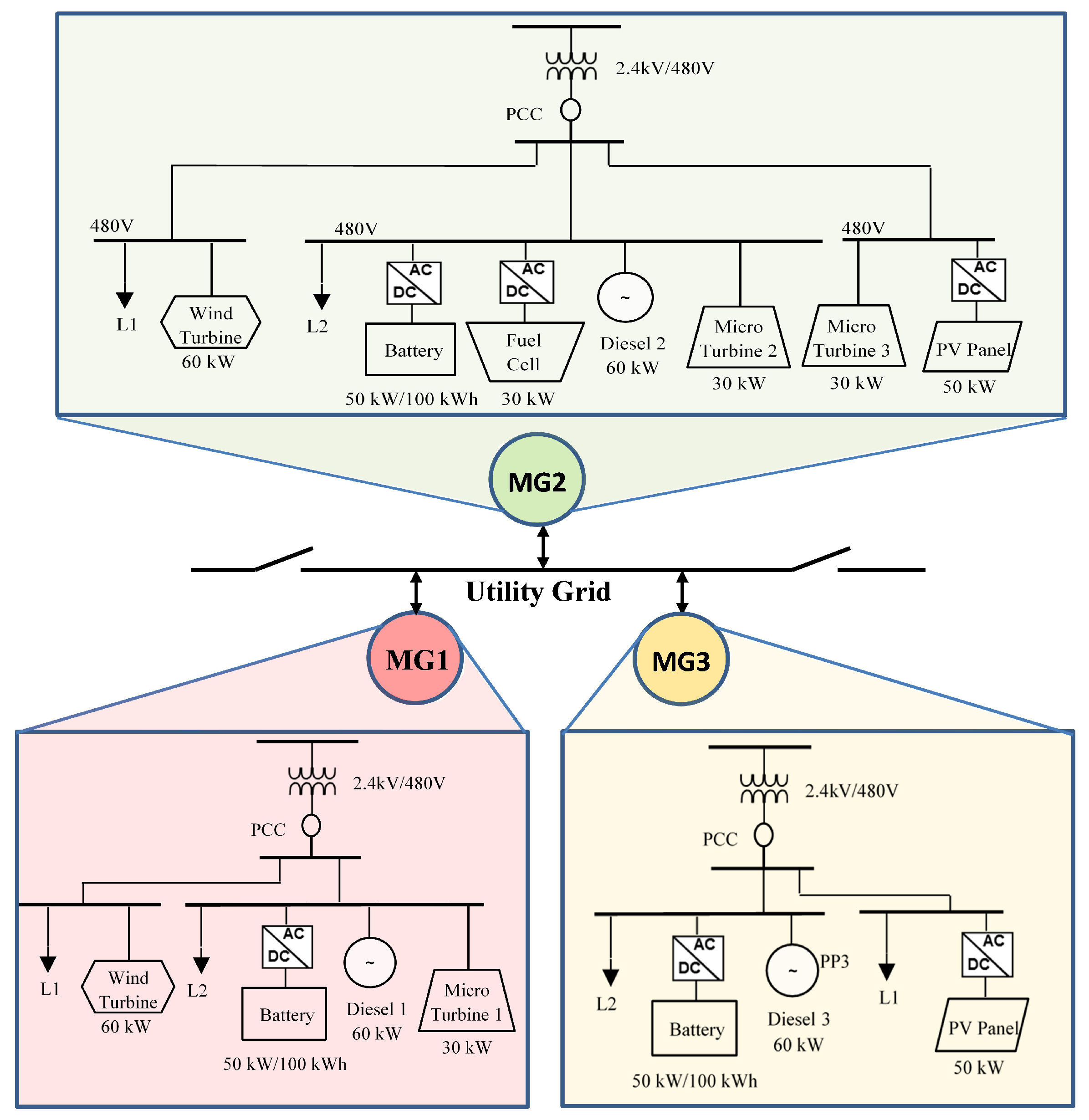
2.1. Microgrid Components
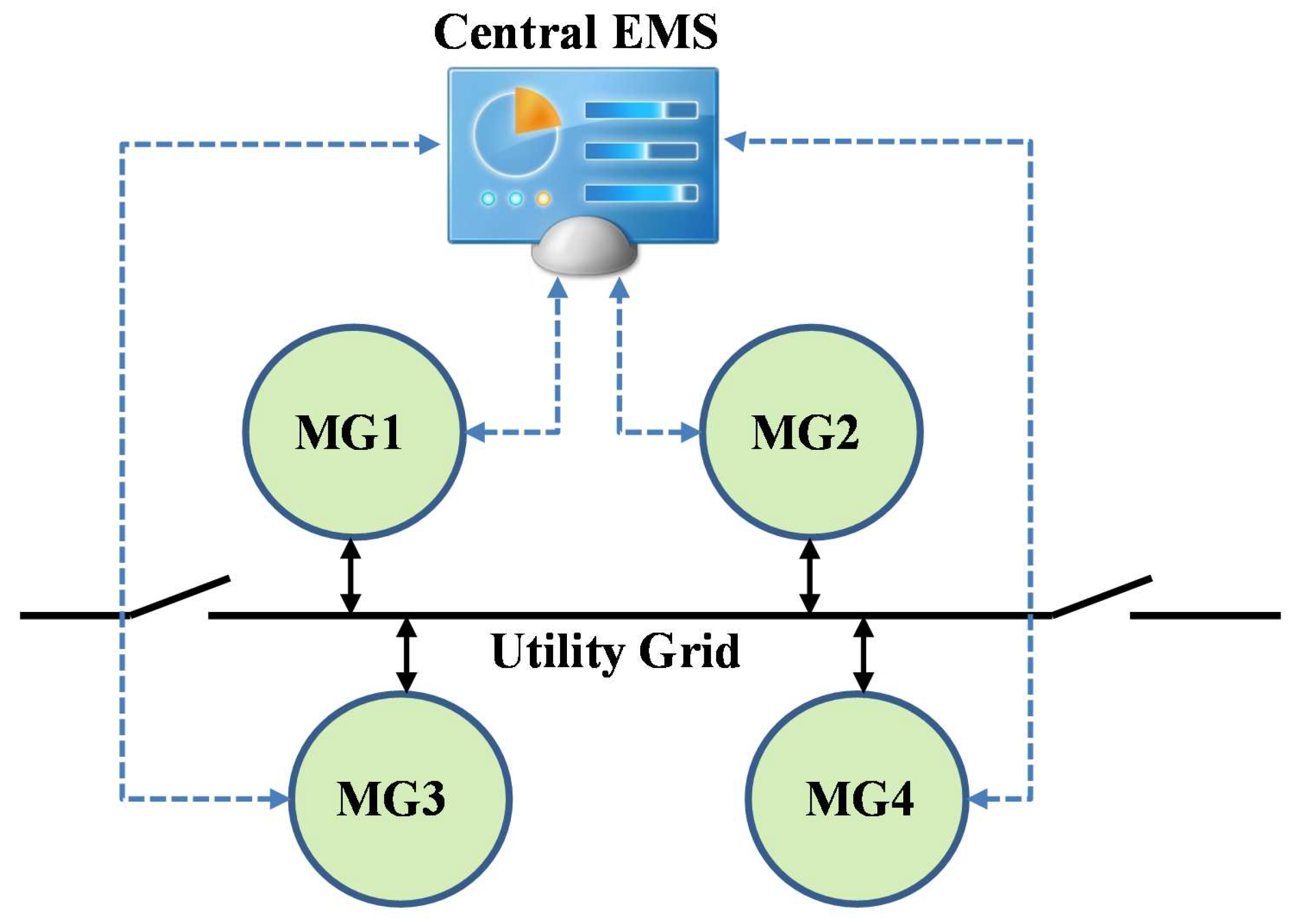
2.2. Networked Microgrids Structure
3. Mathematical Formulation
3.1. Robust Optimization Model
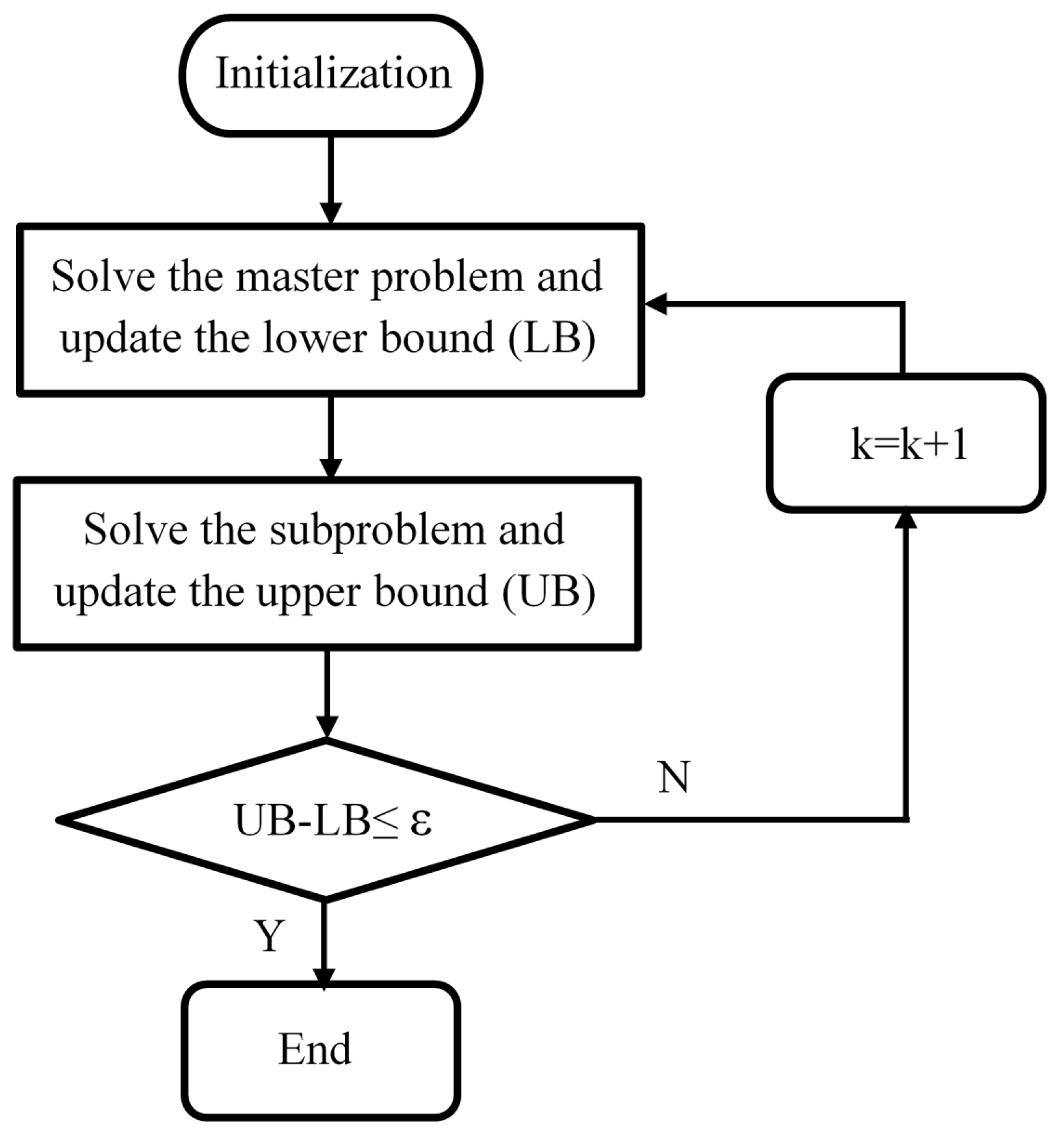
3.2. Solution Algorithm
4. Case Studies
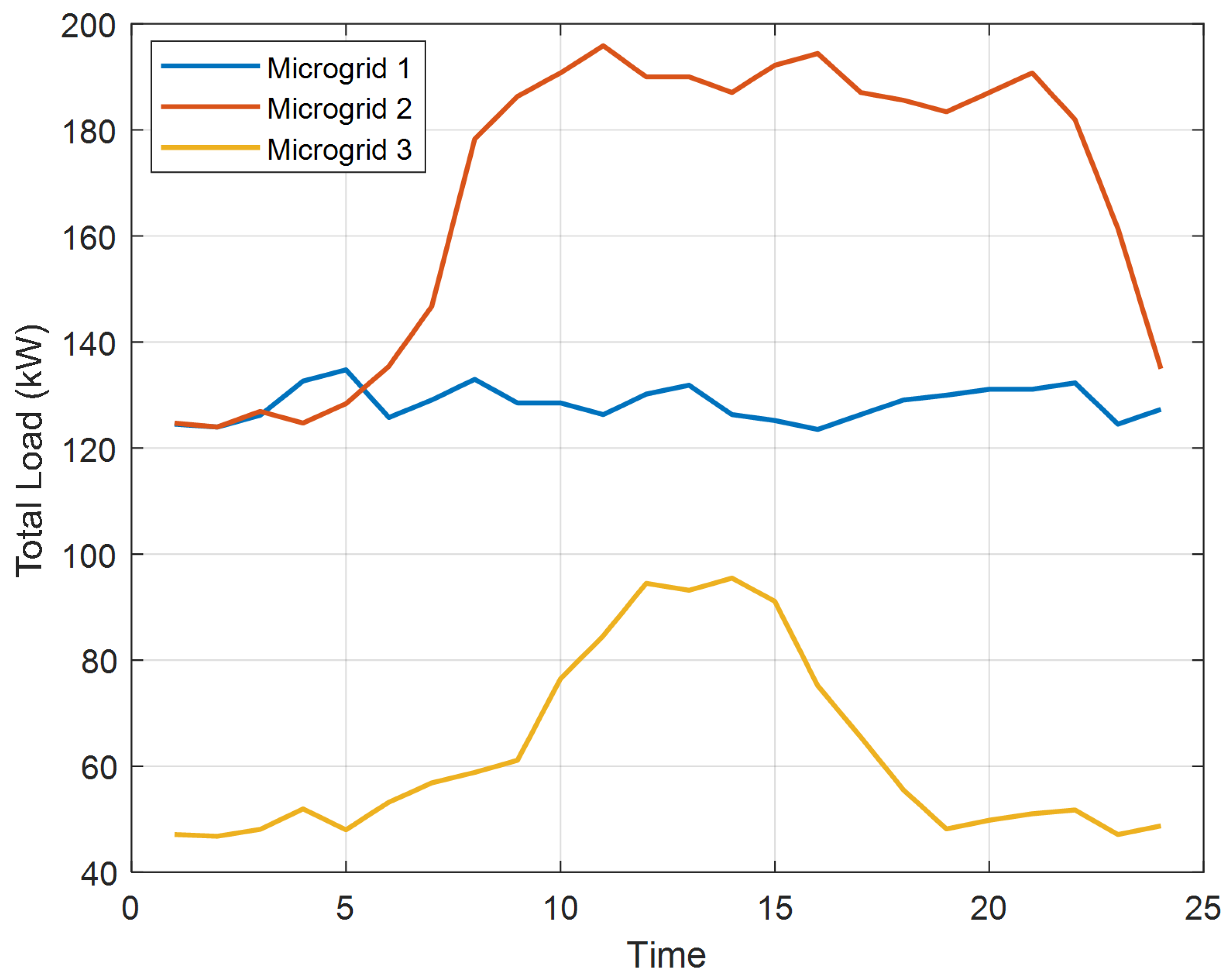
4.1. Test System Data
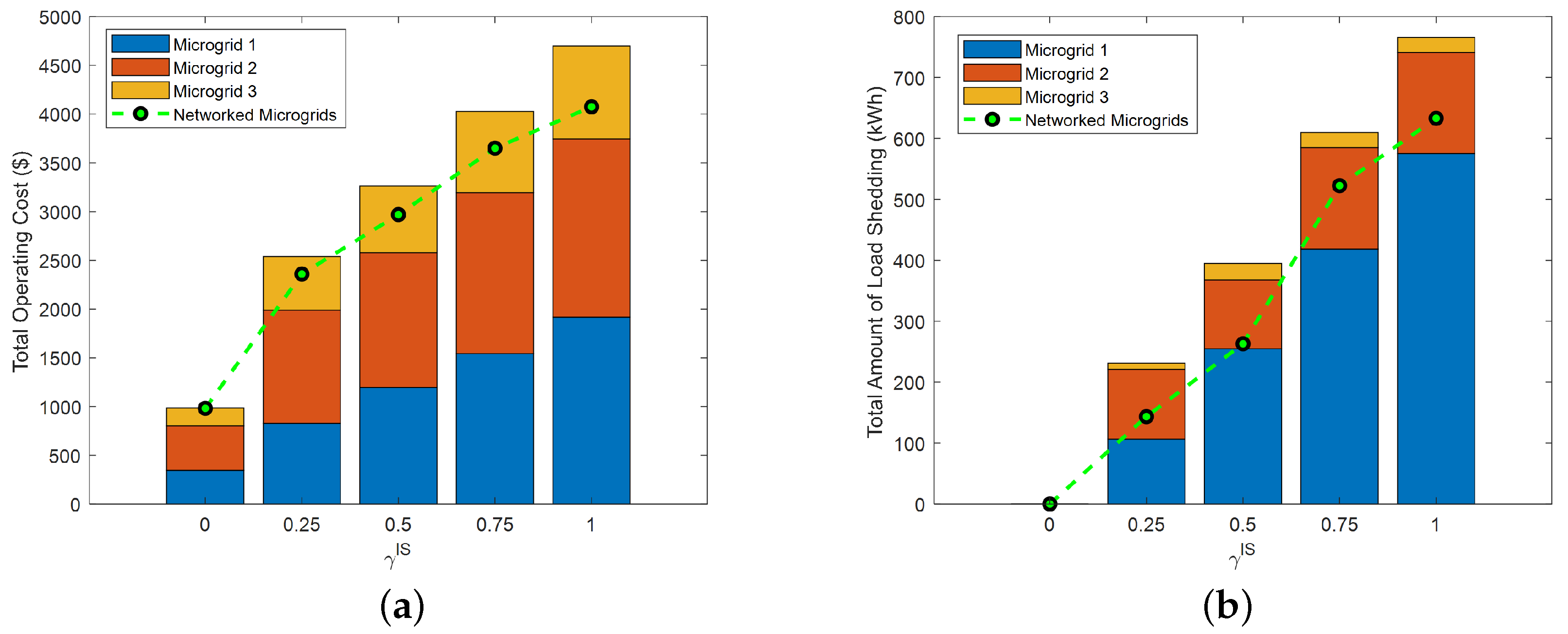
4.2. Advantages of Networked Microgrids
4.3. Convergence of C&CG Algorithm
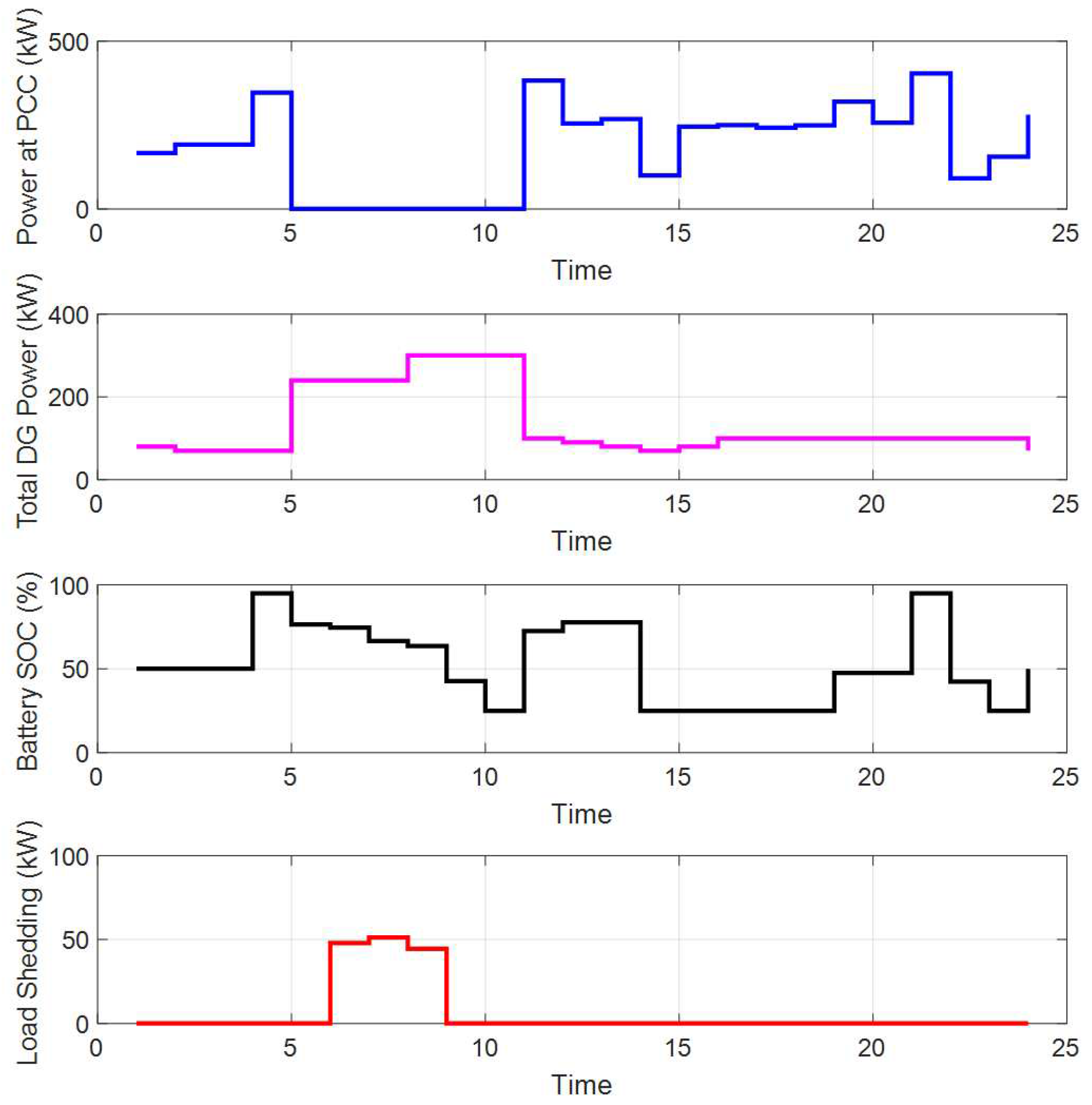
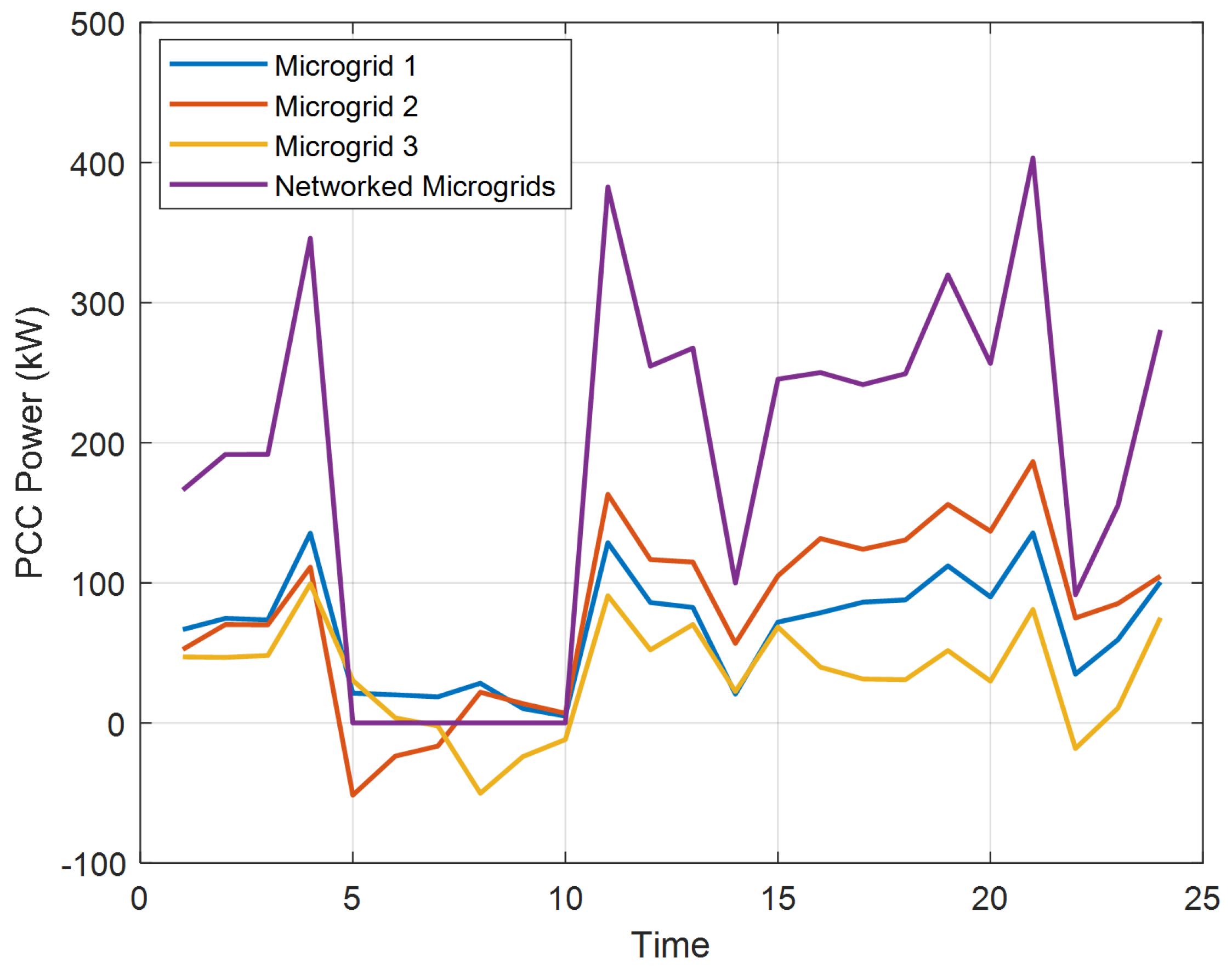
4.4. Example Solutions of C&CG Algorithm
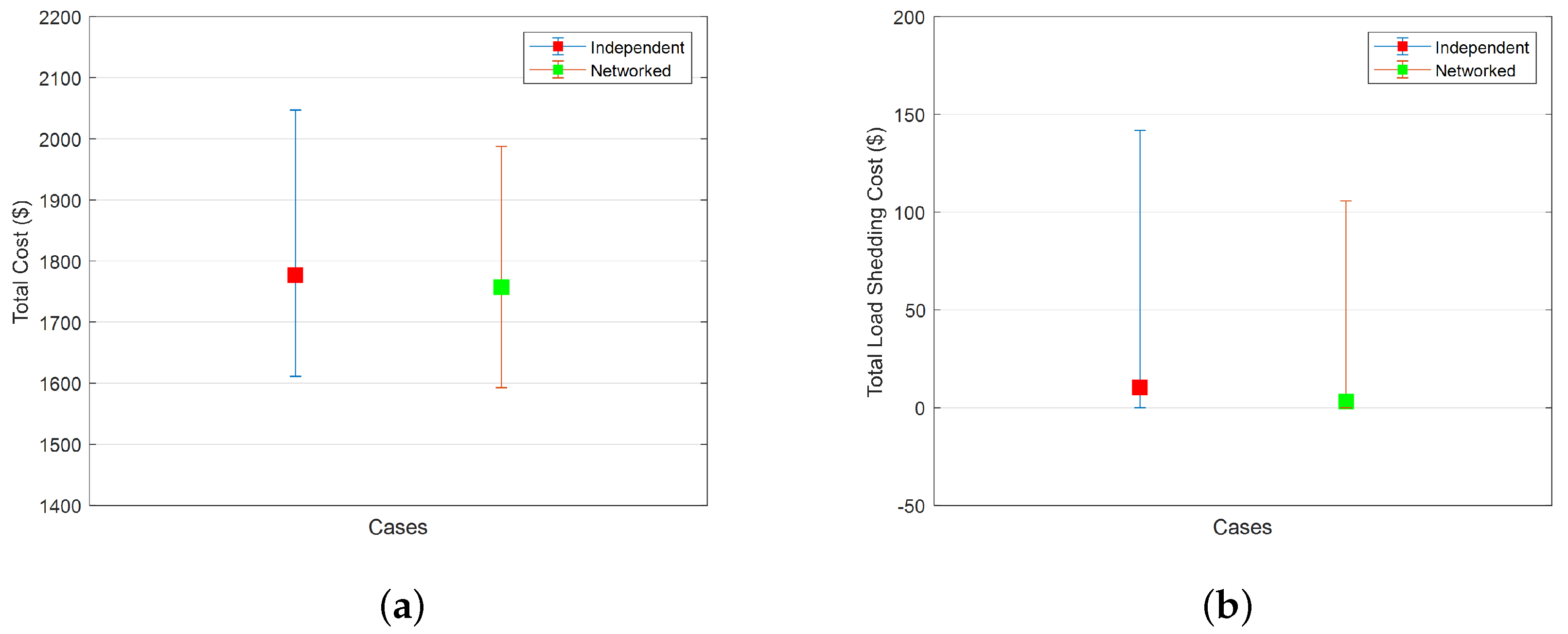
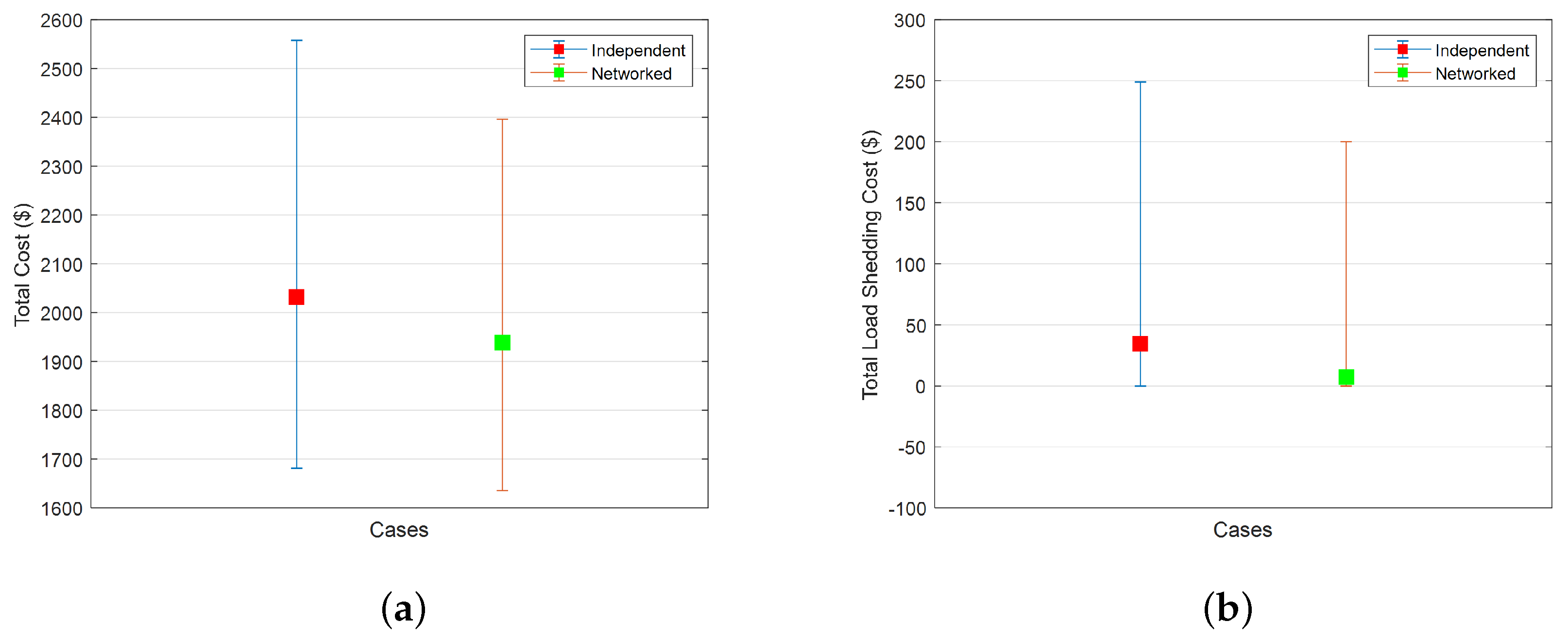
4.5. Stochastic Evaluation of Independent Microgrids and Networked Microgrids
- Step 1:
- Set the uncertainty budget of unintentional islanding condition and uncertainty budget of renewable generation and load .
- Step 2:
- Solve the robust optimization model for networked microgrids and each independent microgrid separately.
- Step 3:
- Generate the test set of 1000 scenarios.
- Step 4:
- For networked microgrids, fix the commitment status of DGs and conduct Monte Carlo simulation for each test scenario.
- Step 5:
- For each independent microgrid, fix the commitment status of DGs and conduct Monte Carlo simulation for each test scenario.
- Step 6:
- Collect the total operating costs and load shedding costs for further comparison and analysis.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Indices | |
| i | Index of dispatchable generators in microgrid m, running from 1 to . |
| d | Index of loads in microgrid m, running from 1 to . |
| b | Index of batteries in microgrid m, running from 1 to . |
| w | Index of wind turbines in microgrid m, running from 1 to . |
| v | Index of PV in microgrid m, running from 1 to |
| t | Index of time intervals, running from 1 to . |
| m | Index of microgrids, running from 1 to . |
| k | Index of iterations. |
| Variables | |
| Binary Variables | |
| 1 if unit i in microgrid m is scheduled on during period t and 0 otherwise. | |
| 1 if microgrids are grid-connected and 0 otherwise. | |
| Continuous Variables | |
| Power output of unit i during period t. | |
| Power at point of common coupling (PCC) of microgrid m during period t. | |
| Charging/discharging power of battery b during period t. | |
| State of charge (SOC) of battery b during period t. | |
| Power output of wind turbine w during period t. | |
| Power output of PV panel v during period t. | |
| Power consumption scheduled for load d during period t. | |
| Load shedding of load d during period t. | |
| Auxiliary variables for forecast error of wind power . | |
| Auxiliary variables for forecast error of PV power . | |
| Auxiliary variables for forecast error of load . | |
| Constants | |
| Degradation cost of battery b during period t. | |
| Fixed operation and maintenance (O&M) cost of DG i during period t. | |
| Variable O&M cost of DG i during period t. | |
| Utility rate of microgrid m during period t. | |
| Maximum/minimum output of DG i. | |
| Maximum PCC power of microgrid m during period t. | |
| Forecasted power output of wind turbine w during period t. | |
| Forecasted power output of PV panel v during period t. | |
| Forecasted consumption of load d during period t. | |
| Maximum charging/discharging power of battery b. | |
| Maximum/minimum state of charge of battery b during period t. | |
| Battery charging/discharging efficiency factor. | |
| Maximum deviations from the nominal forecast values , , and . | |
| Robust control parameter of renewable generation and demand during | |
| period t. | |
| Normalized robust control parameter of renewable generation and demand | |
| during period t. | |
| Robust control parameter of unintentional islanding conditions. | |
| Normalized robust control parameter of unintentional islanding conditions. | |
| Time duration of each period. | |
| Maximum percentage of allowed shedding of demand d during period t. | |
| Maximum optimality gap for convergence. |
References
- Cagnano, A.; De Tuglie, E.; Mancarella, P. Microgrids: Overview and guidelines for practical implementations and operation. Appl. Energy 2020, 258, 114039. [Google Scholar] [CrossRef]
- Khan, M.Z.; Mu, C.; Habib, S.; Alhosaini, W.; Ahmed, E.M. An Enhanced Distributed Voltage Regulation Scheme for Radial Feeder in Islanded Microgrid. Energies 2021, 14, 6092. [Google Scholar] [CrossRef]
- Park, B.; Zhang, Y.; Olama, M.; Kuruganti, T. Model-free control for frequency response support inmicrogrids utilizing wind turbines. Elec. Power Syst. Res. 2021, 194, 107080. [Google Scholar] [CrossRef]
- Liu, R.; Wang, S.; Liu, G.; Wen, S.; Zhang, J.; Ma, Y. An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems. Energies 2022, 15, 442. [Google Scholar] [CrossRef]
- Wang, Y.; Rousis, A.O.; Strbac, G. On microgrids and resilience: A comprehensive review on modeling and operational strategies. Renew. Sustain. Energy Rev. 2020, 134, 110313. [Google Scholar] [CrossRef]
- Warneryd, M.; Hakansson, M.; Karltorp, K. Unpacking the complexity of community microgrids: A review of institutions’ roles for development of microgrids. Renew. Renew. Sustain. Energy Rev. 2020, 121, 109690. [Google Scholar] [CrossRef]
- Chen, B.; Wang, J.; Lu, X.; Chen, C.; Zhao, S. Networked Microgrids for Grid Resilience, Robustness, and Efficiency: A Review. IEEE Trans. Smart Grid 2021, 12, 18–32. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, Z.; Jiang, C.; Li, Z. Bi-Level Robust Optimization for Distribution System With Multiple Microgrids Considering Uncertainty Distribution Locational Marginal Price. IEEE Trans. Smart Grid 2021, 12, 1104–1117. [Google Scholar] [CrossRef]
- Hussain, A.; Bui, V.H.; Kim, H.M. A Resilient and Privacy- Preserving Energy Management Strategy for Networked Microgrids. IEEE Trans. Smart Grid 2018, 9, 2127–2139. [Google Scholar] [CrossRef]
- Li, Z.; Shahidehpour, M. Privacy-Preserving Collaborative Operation of Networked Microgrids with the Local Utility Grid Based on Enhanced Benders Decomposition. IEEE Trans. Smart Grid 2020, 11, 2638–2651. [Google Scholar] [CrossRef]
- Xu, Q.; Zhao, T.; Xu, Y.; Xu, Z.; Wang, P.; Blaabjerg, F. A Distributed and Robust Energy Management System for Networked Hybrid AC/DC Microgrids. IEEE Trans. Smart Grid 2020, 11, 3496–3508. [Google Scholar] [CrossRef]
- Bajwa, A.A.; Mokhlis, H.; Mekhilef, S.; Mubin, M. Enhancing power system resilience leveraging microgrids: A review. J. Renew. Sustain. Energy 2019, 11, 035503. [Google Scholar] [CrossRef]
- Liu, G.; Jiang, T.; Ollis, T.B.; Li, X.; Li, F.; Tomsovic, K. Resilient distribution system leveraging distributed generation and microgrids: A review. IET Energy Syst. Integr. 2020, 2, 289–304. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, C.C.; Schneider, K.P.; Tuffner, F.K.; Ton, D. Microgrids for Service Restoration to Critical Load in a Resilient Distribution System. IEEE Trans. Smart Grid 2018, 9, 426–437. [Google Scholar] [CrossRef]
- Arif, A.; Wang, Z. Networked microgrids for service restoration in resilient distribution systems. IET Gener. Transm. Distrib. 2017, 11, 3612–3619. [Google Scholar] [CrossRef]
- Lin, W.; Zhu, J.; Yuan, Y.; Wu, H. Robust Optimization for Island Partition of Distribution System Considering Load Forecasting Error. IEEE Access 2019, 7, 64247–64255. [Google Scholar] [CrossRef]
- Zhou, Q.; Shahidehpour, M.; Alabdulwahab, A.; Abusorrah, A. Flexible Division and Unification Control Strategies for Resilience Enhancement in Networked Microgrids. IEEE Trans. Power Syst. 2020, 35, 474–486. [Google Scholar] [CrossRef]
- Marchgraber, J.; Gawlik, W. Investigation of Black-Starting and Islanding Capabilities of a Battery Energy Storage System Supplying a Microgrid Consisting of Wind Turbines, Impedance- and Motor-Loads. Energies 2020, 13, 5170. [Google Scholar] [CrossRef]
- Zhao, Y.; Lin, Z.; Ding, Y.; Liu, Y.; Sun, L.; Yan, Y. A Model Predictive Control Based Generator Start-Up Optimization Strategy for Restoration With Microgrids as Black-Start Resources. IEEE Trans. Power Syst. 2018, 33, 7189–7203. [Google Scholar] [CrossRef]
- Francisco, F.; Giraldez, J.; Pratt, A. Networked Microgrid Optimal Design and Operations Tool: Regulatory and Business Environment Study; NREL/TP-5D00-70944; National Renewable Energy Laboratory: Golden, CO, USA, 2020. [Google Scholar]
- Liu, G.; Starke, M.; Xiao, B.; Zhang, X.; Tomsovic, K. Microgrid Optimal Scheduling With Chance-Constrained Islanding Capability. Electr. Power Syst. Res. 2017, 145, 197–206. [Google Scholar] [CrossRef] [Green Version]
- Hemmati, M.; Mohammadi-Ivatloo, B.; Abapour, M.; Anvari-Moghaddam, A. Optimal Chance-Constrained Scheduling of Reconfigurable Microgrids Considering Islanding Operation Constraints. IEEE Syst. J. 2020, 14, 5340–5349. [Google Scholar] [CrossRef]
- Farzin, H.; Fotuhi-Firuzabad, M.; Moeini-Aghtaie, M. Stochastic Energy Management of Microgrids During Unscheduled Islanding Period. IEEE Trans. Ind. Inform. 2017, 13, 1079–1087. [Google Scholar] [CrossRef]
- Liu, G.; Starke, M.; Xiao, B.; Tomsovic, K. Robust Optimization Based Microgrid Scheduling with Islanding Constraints. IET Gener. Transm. Distrib. 2017, 11, 1820–1828. [Google Scholar] [CrossRef]
- Liu, G.; Ollis, T.B.; Zhang, Y.; Jiang, T.; Tomsovic, K. Robust Microgrid Scheduling With Resiliency Considerations. IEEE Access 2020, 8, 153169–153182. [Google Scholar] [CrossRef]
- Kumari, K.S.K.; Babu, R.S.R. Optimal scheduling of a micro-grid with multi-period islanding constraints using hybrid CFCS technique. Evol. Intell. 2021, 15, 723–742. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, C. Islanding-Aware Robust Energy Management for Microgrids. IEEE Trans. Smart Grid 2018, 9, 1301–1309. [Google Scholar] [CrossRef]
- Shahid, F.; Zameer, A.; Muneeb, M. A novel genetic LSTM model for wind power forecast. Energy 2021, 223, 1200692. [Google Scholar] [CrossRef]
- Mora, E.; Cifuentes, J.; Marulanda, G. Short-Term Forecasting of Wind Energy: A Comparison of Deep Learning Frameworks. Energies 2021, 14, 7943. [Google Scholar] [CrossRef]
- Ahmed, R.; Sreeram, V.; Mishra, Y.; Arif, M.D. A review and evaluation of the state-of-the-art in PV solar power forecasting: Techniques and optimization. Renew. Sustain. Energy Rev. 2020, 124, 109792. [Google Scholar] [CrossRef]
- Sundararajan, A.; Ollis, B. Regression and Generalized Additive Model to Enhance the Performance of Photovoltaic Power Ensemble Predictors. IEEE Access 2021, 9, 111899–111914. [Google Scholar] [CrossRef]
- Ortega-Vazquez, M. Optimizing the Spinning Reserve Requirements; The University of Manchester: Manchester, UK, 2006; pp. 1–219. Available online: https://labs.ece.uw.edu/real/Library/Thesis/Miguel_ORTEGA-VAZQUEZ.pdf (accessed on 1 March 2022).
- Zeng, B.; Zhao, L. Solving two-stage robust optimization problems using a column-and-constraint generation method. Oper. Res. Lett. 2013, 41, 457–461. [Google Scholar] [CrossRef]
- Bertsimas, D.; Litvinov, E.; Sun, X.A.; Zhao, J.; Zheng, T. Adaptive robust optimization for the security constrained unit commitment problem. IEEE Trans. Power Syst. 2013, 28, 52–63. [Google Scholar] [CrossRef]
- Jiang, R.; Wang, J.; Guan, Y. Robust Unit Commitment With Wind Power and Pumped Storage Hydro. IEEE Trans. Power Syst. 2012, 27, 800–810. [Google Scholar] [CrossRef]
- Xiao, B.; Starke, M.; Liu, G.; Ollis, B.; Irminger, P.; Dimitrovski, A.; Prabakar, K.; Dowling, K.; Xu, Y. Development of hardware-in-the-loop microgrid testbed. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1196–1202. [Google Scholar]
- The IBM ILOG CPLEX Optimization Studio. 2022. Available online: https://www.ibm.com/products/ilog-cplex-optimization-studio?utm_content=SRCWW&p1=Search&p4=43700050328194740&p5=e&gclid=Cj0KCQjw29CRBhCUARIsAOboZbI0ay13LpL9AR2CT7A-GWbanqyRRsSiBT7B1Hu1eyUWeB783GaIINYaAoWVEALw_wcB&gclsrc=aw.ds (accessed on 1 March 2022).
- Liu, G.; Tomsovic, K. Robust Unit Commitment Considering Uncertain Demand Response. Electr. Power Syst. Res. 2015, 119, 126–137. [Google Scholar] [CrossRef] [Green Version]
- Erdinc, F.G.; Cicek, A.; Erdinc, O.; Yumurtaci, R. Uncertainty-Aware Decision Making in Power Systems Including Energy Storage, Dynamic Line Rating and Responsive Demand as Multiple Flexibility Resources. In Proceedings of the 2021 International Conference on Smart Energy Systems and Technologies (SEST), Vaasa, Finland, 6–8 September 2021; pp. 1–6. [Google Scholar]
- Wu, Y.K.; Lai, Y.H.; Huang, C.L.; Phuong, N.T.B.; Tan, W.S. Artificial Intelligence Applications in Estimating Invisible Solar Power Generation. Energies 2022, 15, 1312. [Google Scholar] [CrossRef]
- Dehghani-Filabadi, M.; Mahmoudzadeh, H. Effective Budget of Uncertainty for Classes of Robust Optimization. INFORMS J. Optim. 2022. Available online: Https://pubsonline.informs.org/doi/10.1287/ijoo.2021.0069 (accessed on 1 March 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG Type | (kW) | (kW) | Start-Up Cost ($) | Shut-Down Cost ($) | Variable O&M Cost ($/kWh) | Fixed O&M Cost ($/h) |
|---|---|---|---|---|---|---|
| Diesel 1 | 20 | 60 | 3.5 | 1.75 | 0.3502 | 1 |
| Diesel 2 | 20 | 60 | 3 | 1.5 | 0.5239 | 1 |
| Diesel 3 | 20 | 60 | 2.5 | 1.25 | 0.6317 | 1 |
| Microturbine 1 | 10 | 30 | 2 | 1 | 0.2885 | 1 |
| Microturbine 2 | 10 | 30 | 2 | 1 | 0.4507 | 1 |
| Microturbine 3 | 10 | 30 | 1.5 | 0.75 | 0.3885 | 1 |
| Fuel Cell | 10 | 30 | 1 | 0.5 | 0.3385 | 1 |
| Battery Type | Power Capacity (kW) | Energy Capacity (kWh) | (%) | (%) |
| Lithium-Ion | 50 | 100 | 95 | 25 |
| Degradation Cost ($/kWh) | Charging Efficiency (%) | Discharging Efficiency (%) | Initial SOC (%) | End SOC (%) |
| 0.02 | 0.95 | 0.95 | 50 | 50 |
| Hour | (kW) | Hour | (kW) | Hour | (kW) |
|---|---|---|---|---|---|
| 1 | 51.4829 | 9 | 21.7503 | 17 | 24.2732 |
| 2 | 38.3711 | 10 | 34.8202 | 18 | 26.2555 |
| 3 | 43.5590 | 11 | 27.1748 | 19 | 26.7732 |
| 4 | 40.7514 | 12 | 30.1965 | 20 | 26.2159 |
| 5 | 27.7421 | 13 | 23.5169 | 21 | 32.8428 |
| 6 | 30.1540 | 14 | 39.4794 | 22 | 36.0156 |
| 7 | 28.6452 | 15 | 35.738 | 23 | 37.2312 |
| 8 | 23.3767 | 16 | 18.0583 | 24 | 44.1215 |
| Hour | (kW) | Hour | (kW) | Hour | (kW) |
|---|---|---|---|---|---|
| 1 | 0 | 9 | 5.2978 | 17 | 14.1823 |
| 2 | 0 | 10 | 11.6044 | 18 | 4.6705 |
| 3 | 0 | 11 | 36.6382 | 19 | 0.1836 |
| 4 | 0 | 12 | 42.6778 | 20 | 0 |
| 5 | 0 | 13 | 35.2199 | 21 | 0 |
| 6 | 0 | 14 | 35.4594 | 22 | 0 |
| 7 | 0.1617 | 15 | 34.8303 | 23 | 0 |
| 8 | 1.7726 | 16 | 23.6244 | 24 | 0 |
| Hour | (ct/kWh) | Hour | (ct/kWh) | Hour | (ct/kWh) |
|---|---|---|---|---|---|
| 1 | 8.65 | 9 | 12.0 | 17 | 16.42 |
| 2 | 8.11 | 10 | 9.19 | 18 | 9.83 |
| 3 | 8.25 | 11 | 12.3 | 19 | 8.63 |
| 4 | 8.10 | 12 | 20.7 | 20 | 8.87 |
| 5 | 8.14 | 13 | 26.82 | 21 | 8.35 |
| 6 | 8.13 | 14 | 27.35 | 22 | 16.44 |
| 7 | 8.34 | 15 | 13.81 | 23 | 16.19 |
| 8 | 9.35 | 16 | 17.31 | 24 | 8.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Ollis, T.B.; Ferrari, M.F.; Sundararajan, A.; Tomsovic, K. Robust Scheduling of Networked Microgrids for Economics and Resilience Improvement. Energies 2022, 15, 2249. https://doi.org/10.3390/en15062249
Liu G, Ollis TB, Ferrari MF, Sundararajan A, Tomsovic K. Robust Scheduling of Networked Microgrids for Economics and Resilience Improvement. Energies. 2022; 15(6):2249. https://doi.org/10.3390/en15062249
Chicago/Turabian StyleLiu, Guodong, Thomas B. Ollis, Maximiliano F. Ferrari, Aditya Sundararajan, and Kevin Tomsovic. 2022. "Robust Scheduling of Networked Microgrids for Economics and Resilience Improvement" Energies 15, no. 6: 2249. https://doi.org/10.3390/en15062249
APA StyleLiu, G., Ollis, T. B., Ferrari, M. F., Sundararajan, A., & Tomsovic, K. (2022). Robust Scheduling of Networked Microgrids for Economics and Resilience Improvement. Energies, 15(6), 2249. https://doi.org/10.3390/en15062249