1. Introduction
Agriculture has always played a crucial role when it comes to food for human beings. With the current population growth, the need for a highly productive agriculture has become mandatory. In this direction, agriculture automation and mechanization have proven to increase farms productivity [
1]. However, with productivity comes a high impact on the environment. In particular, cultivation agriculture alone can be seen as responsible for almost 20% of the annual global production of CO
2 emissions [
2]. Other harmful products, such as NO
x and particulate matter, are the undesired effects of all the heavy-duty agricultural machinery propelled by high-power diesel engines to perform their daily activities [
3]. For this reason, strict emission regulations have been progressively imposed all around the world to mitigate, in general, pollutant emissions of non-road mobile machinery (NRMM) [
4].
To be compliant with these regulations, several techniques have been proposed by OEM diesel engines manufacturers [
5]. Exhaust gas recirculation (EGR) systems aim to reduce the amount of NO
x emissions recirculating in the combustion chamber part of the exhaust stream to reduce the average combustion temperature. However, to produce the same amount of power, a higher fuel rate should be provided; thus, overall lower efficiency of the system can be expected. Diesel particulate filter (DPF) systems remove particulate matter of a certain grain size from the exhaust gases, but periodic fuel burning procedures are required to clean the filter. Selective catalytic reduction (SCR) systems introduce molecular ammonia into the exhaust stream to lower the amount of NO
x. However, despite the higher efficiency of these systems, the vehicle should be provided with a dedicated tank to store urea solutions to be used while working. Overall, those systems proposed at the OEM level do not completely solve the problem and put vehicle manufacturers in difficulties when it comes to onboard integration. However, agricultural tractors and in particular specialized tractors, are well known for the compactness of their powertrains, which is required for visibility, maneuverability [
6] and in general to reduce the overall weight which can cause excessive soil compaction. For these reasons, new technologies have been explored by researchers and manufacturers to reduce pollutant emissions, increasing the overall efficiency of the vehicle.
On that topic, tractor powertrain electrification is one of the most promising strategies that will gain visibility in the upcoming years [
7]. As suggested by Somà et al. [
8], electrification of a heavy-duty working vehicle should always be performed with a proper hybridization factor (HF) between the thermal engine and the electric machines. The HF value for a working vehicle should come from the statistical investigation on the average use of the specific machine to avoid improper adoption of oversized components, which would affect the overall functionality and cost of the machine [
9]. Actually, a good design based on the working cycle of the machine can allow the use of full electric architectures (with HF = 1), thereby avoiding the use of an internal combustion Engine (ICE) as the primary power source in favor of a properly designed battery-based energy storage system (BESS) [
10].
Electric and hybrid topologies for agricultural tractors are becoming more and more interesting for industrial manufacturers, who are proposing concepts of their vehicles at fairs almost all around the world [
11], and they are receiving good feedback by experts of the field. However, the application of this technology on these working machines is still at its early stage, as demonstrated by the absence of commercially available products. The scientific community is demonstrating more and more interest on this topic due to the intrinsic peculiarities of agricultural tractors when compared with other working vehicles. Several studies are available in the literature exploring the performances of specific hybrid electric architectures. Particular attention is given to full electric tractor (FET) configurations, where the entire vehicle is powered by a properly sized BESS, as a viable solution for farm decarbonization [
12]. Liu et al. [
13] explored the overall energy conversion efficiency of a FET when using a load torque-based control strategy to optimize motor performance for a given gearbox transmission. Vogt and Melo et al. [
14,
15] proposed a small FET for family farming applications. Their idea was to propose a tractor with a 9 kW electric motor propelled by a low voltage battery pack, able to perform most of the simplest tasks which need to be performed in a small farm with a low cost tool. To optimize the typical working ranges of a tractor, Li et al. [
16] proposed a FET architecture where two electric motors with different electro-magnetic characteristics are coupled together to have full torque at low rpm and the best efficiency at higher speed ranges. This is an interesting idea, but requires a higher number of components, and thus a lot of space, which goes against the simplicity of a FET architecture.
Although FETs represent a great solution for manufacturers due to the lower number of components involved in comparison with diesel powered traditional tractors, the actual state of the art of BESSs prevents their widespread diffusion due to the limited amount of storable onboard energy. For this reason, several studies focused their attention on the design of and performance evaluations of hybrid electric tractor (HET) architectures. Dalboni et al. [
17] proposed a study where an HET with parallel configuration was studied and built for experimental validation. In this work, the research group proposed a prototype with a downsized diesel engine coupled with an electric motor-generator powered by a 25 kWh BESS. The HET was tested on a field with a set of 12 working scenarios using a charge sustaining control strategy and showing good results in fuel savings. The experimental platform allowed them to demonstrate the unfeasibility of fully electric operation due to the limited energy storage. This vehicle did good results in hybrid mode in all the proposed scenarios though. A similar parallel HET configuration was studied numerically by Mocera and Somà [
18]. They tested a traditional model and a hybrid electric model against test cases derived experimentally from a real orchard tractor. The proposed working scenarios involved both transportation with trailer and field operations with several types of implements attached to the machine. An average energy saving of 17% was obtained by the proposed architecture using a load observer control strategy, which was then tested by Mocera [
19] on a real hardware platform in a hardware-in-the-loop (HIL) test bench configuration. Several studies are also available in the literature on series HET architectures. Baek et al. [
20,
21] proposed a study based on a prototype of an all-wheel drive tractor where four dedicated motors were connected to the wheels with specific gearboxes. In this case, the tractor was of a high-power class with an installed power greater than 120 kW obtained by the cooperation of a battery pack and four gasoline-based commercial generators. The proposed configuration showed good peak torque capabilities but with a workable time of 2.5 h in plow tillage. Thus, in this case too, the size of the battery pack represented a critical point to be addressed. More complex architecture have been investigated in the literature to couple the advantage of series and parallel configuration characteristics. Rossi et al. [
22,
23] proposed a hybrid electric CVT configuration, in which the use of a planetary gearbox increased the efficiency of every operating mode for all the involved power sources. In this way, it was possible to consider the best power flow depending on the specific working conditions the tractor was requested to face. Mocera et al. [
24] investigated a hybrid electric CVT (HeCVT) configuration for an orchard tractor, highlighting energy efficiency improvements ranging from 10% in the most power demanding tasks to 20% for transportation of heavy trailers where the added degrees of freedom helped with the optimal ICE control.
Thus, studies on several HET architectures are available in the literature, but to the authors’ knowledge, there is still no clear answer on which architecture best fits a specific tractor class. In this work, the authors proposed three different HET topologies, whose performances were tested against those of a traditional orchard tractor. To achieve this, the same working scenarios were applied to all the proposed models to perform a one-to-one comparison in terms of peak power capabilities. Moreover, given a certain type of battery pack configuration, all the HET solutions were tested against some representative daily working cycles. Interesting results were obtained in terms of efficiency improvements, although the performances of some of the proposed topologies were more affected than others by the BESS size.
3. Results
To make a comparison between the conventional powertrain and the proposed HET architectures, several tests were performed. Tests were designed to evaluate both peak power capabilities of the proposed powertrains and and energy demand for typical daily working scenarios. Acceleration and slope tests in transportation can give a good representation of peak capabilities, because all the power is directly used for a specific purpose: a quick acceleration or the maximum approachable slope. On the other hand, during field activities, the power produced might need to propel the vehicle in terms of tractive force and/or activate the attached implement. In these cases, the endurance of the power unit is of greater interest because peak capabilities may be involved only for very short periods, whereas the tractor must be able to last an entire working day. This is the reason of the section where considerations about two possible daily working scenarios are provided. Finally, since the BESS has the same characteristics in all the proposed HET architectures, some constraints were applied on its operational capabilities during tests to propose a hypothetical precautionary approach aimed to preserve its state of health (SOH):
Maximum battery pack current during continuous discharging equal to 3 .
Maximum battery pack current during instantaneous discharging equal to 5 (maximum 10 s).
Maximum battery pack current during continuous charging equal to 0.5 .
Maximum battery pack current during instantaneous charging equal to 1 .
These constraints were derived from the knowledge gained by the research group in previous numerical and experimental activities focused on the application of LiFePO4 cells within BESSs specifically designed to operate on hybrid electric working vehicles [
10,
30].
As for the interaction between the wheels and the soil, during the numerical simulations, the static and kinetic friction coefficients were changed according to the simulation’s needs. In particular, for the performance tests and trailer handling tests, the coefficients were set considering a paved road, whereas for the PTO tests they were set considering a field terrain.
3.1. Acceleration Performance
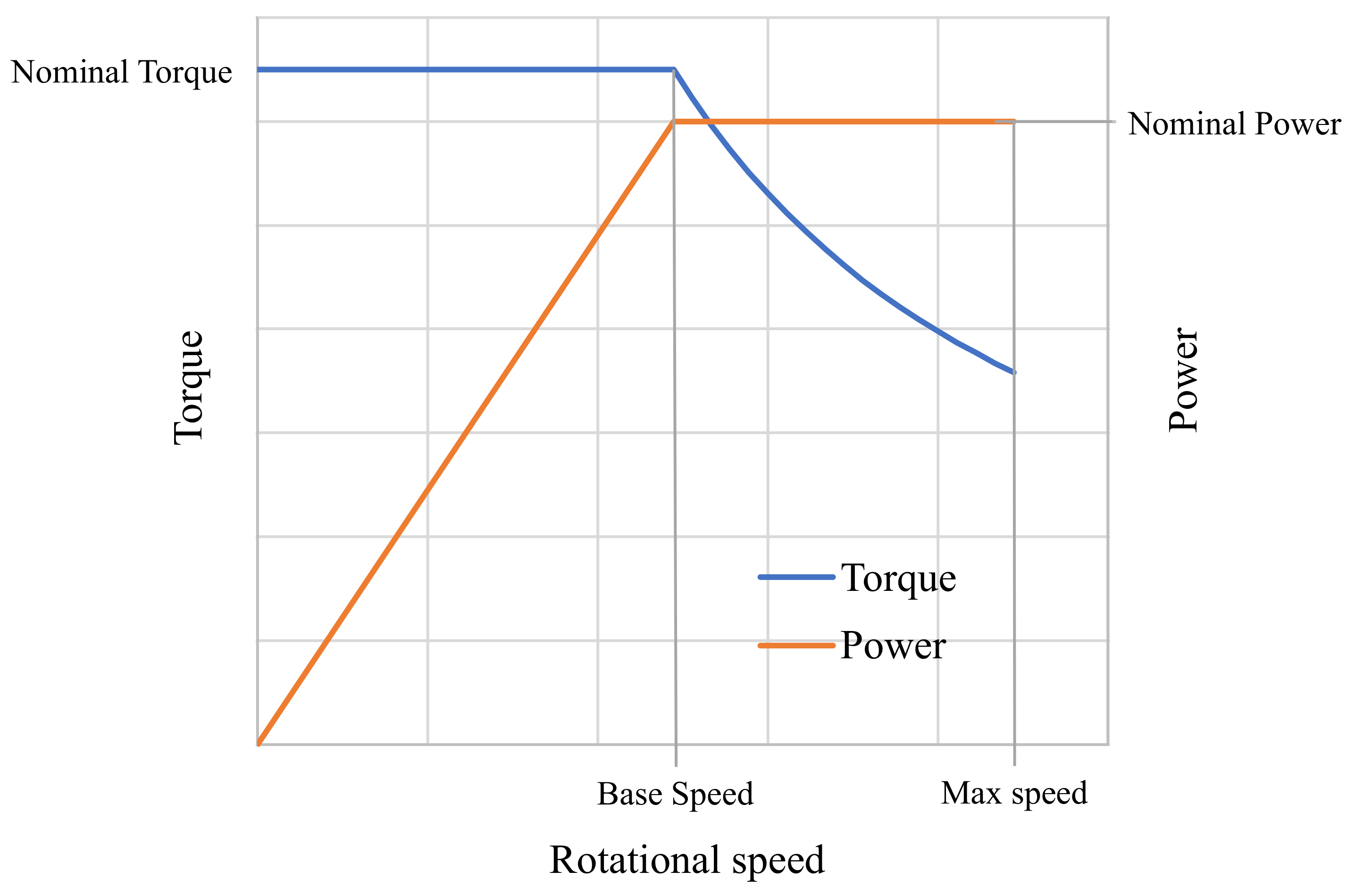
The proposed acceleration tests aimed to evaluate performance of the proposed HET architectures in the two macroscopic working speed ranges within which a traditional tractor may be required to operate. As stated before, these two ranges are characterized by a low maximum speed and high available torque (Low speed range), or by a high maximum travel speed and low torque (High speed range). For these reasons, the following acceleration tests were proposed for the numerical analysis:
0–15 km/h with no trailer, with a trailer with 6000 kg and 10,000 kg of payloads.
0–40 km/h with no trailer, with a trailer with 6000 kg and 10,000 kg of payloads.
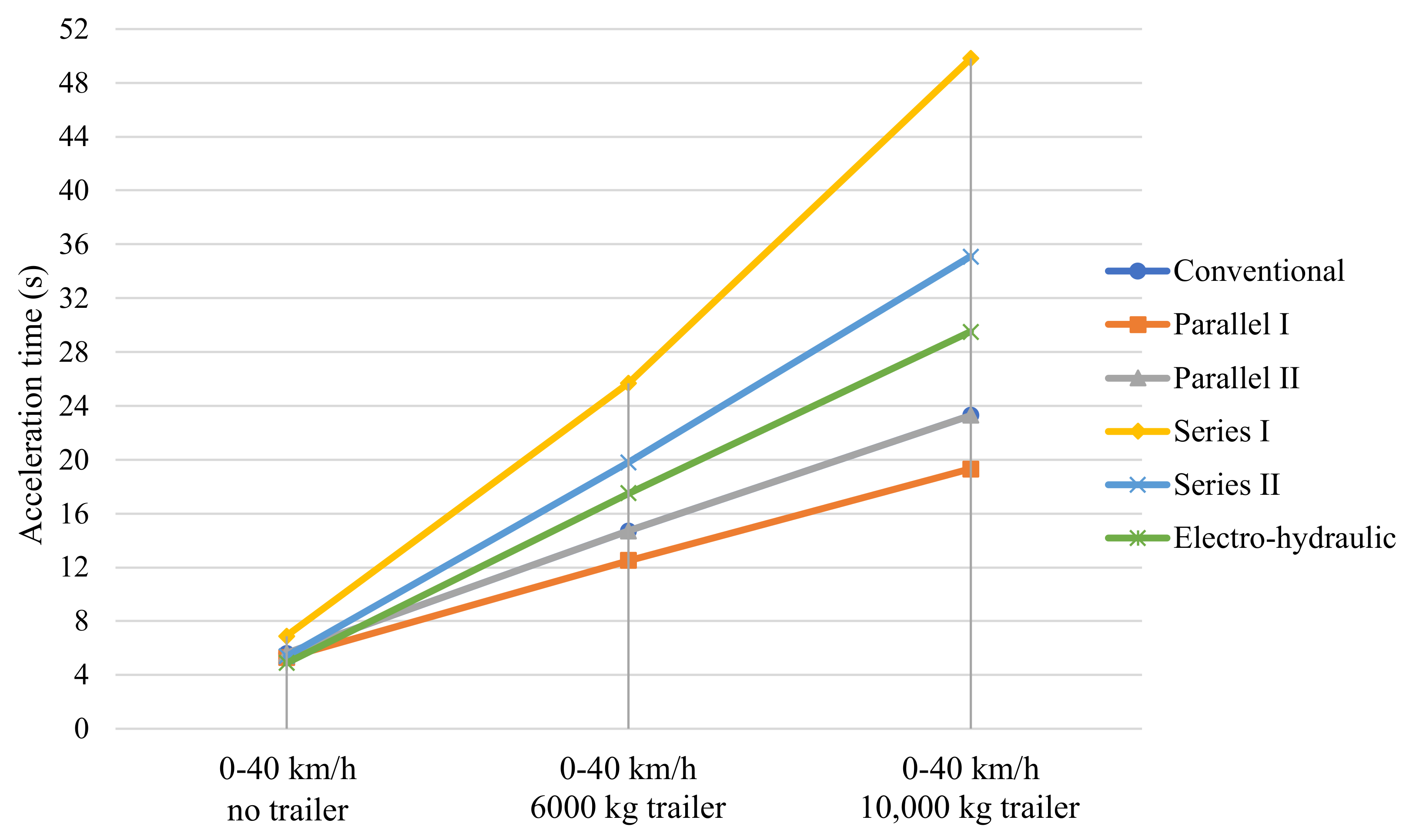
The 0–15 km/h acceleration tests provided very similar results for all the architectures thanks to the high torque multiplication given by the low-speed range gearset. On the other hand, performance analysis in the 0–40 km/h acceleration showed interesting differences between the proposed architectures, particularly when pulling the trailer. In
Figure 15, results of the 0–40 km/h acceleration tests are shown. The Parallel I HET architecture showed the most promising results, as expected, in peak power capabilities. The reason clearly lies in the cooperation between the ICE and EM when it comes to providing direct traction power [
31]. For the proposed characteristics of the electric components, the double energy conversion happening in the Series I and II HET configurations penalized these solutions in pure peak power capabilities. The Parallel II HET architecture showed comparable results with the CDOT version but with a smaller ICE as desired at the design stage. Interesting results were also shown by the electro-hydraulic HET architecture. Despite the not excellent performance in peak power capabilities, it is interesting to note that good acceleration performance was obtained in all the proposed tests, shining a positive light on CVT, which notably increases the user experience of such working vehicles.
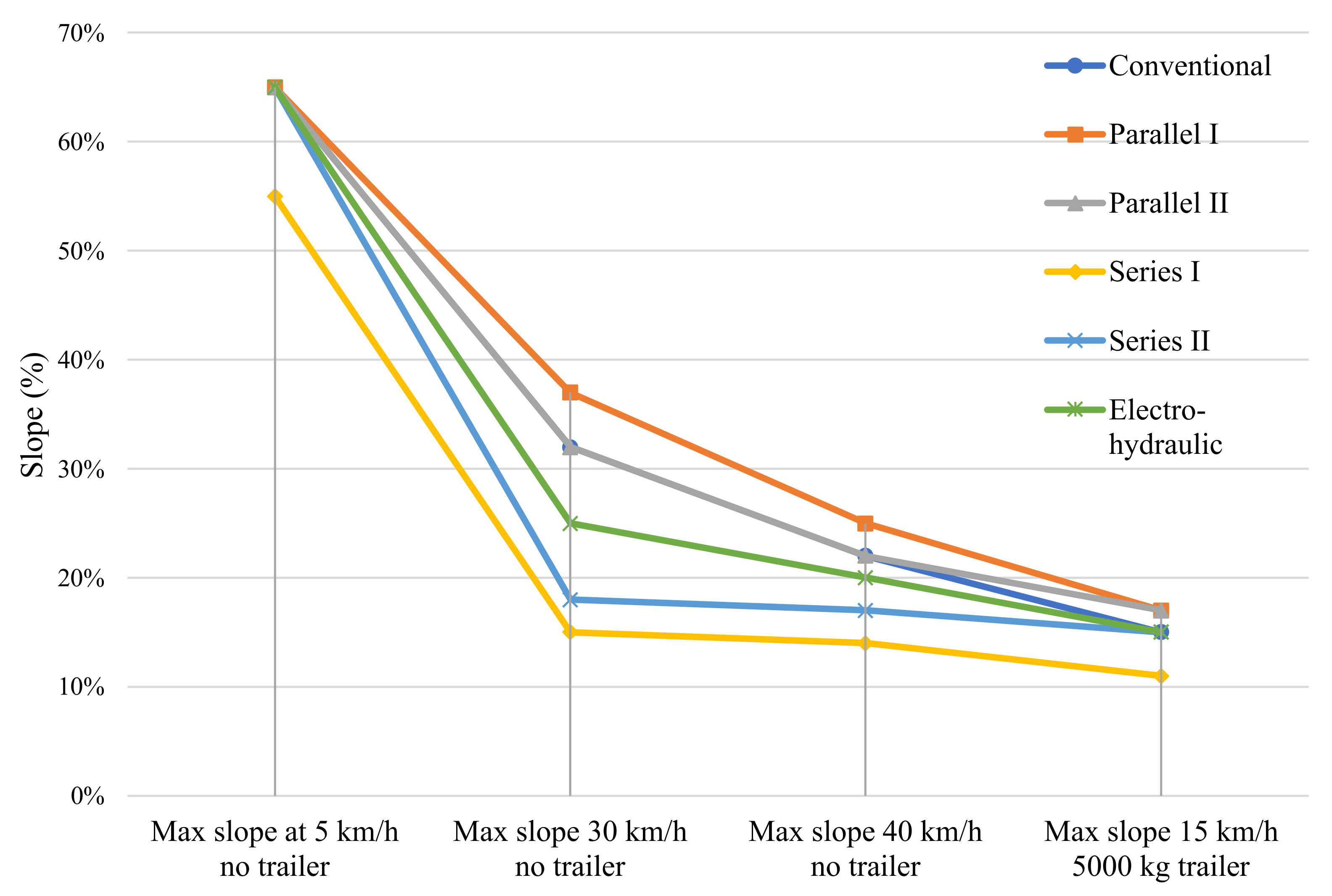
3.2. Slope Performance
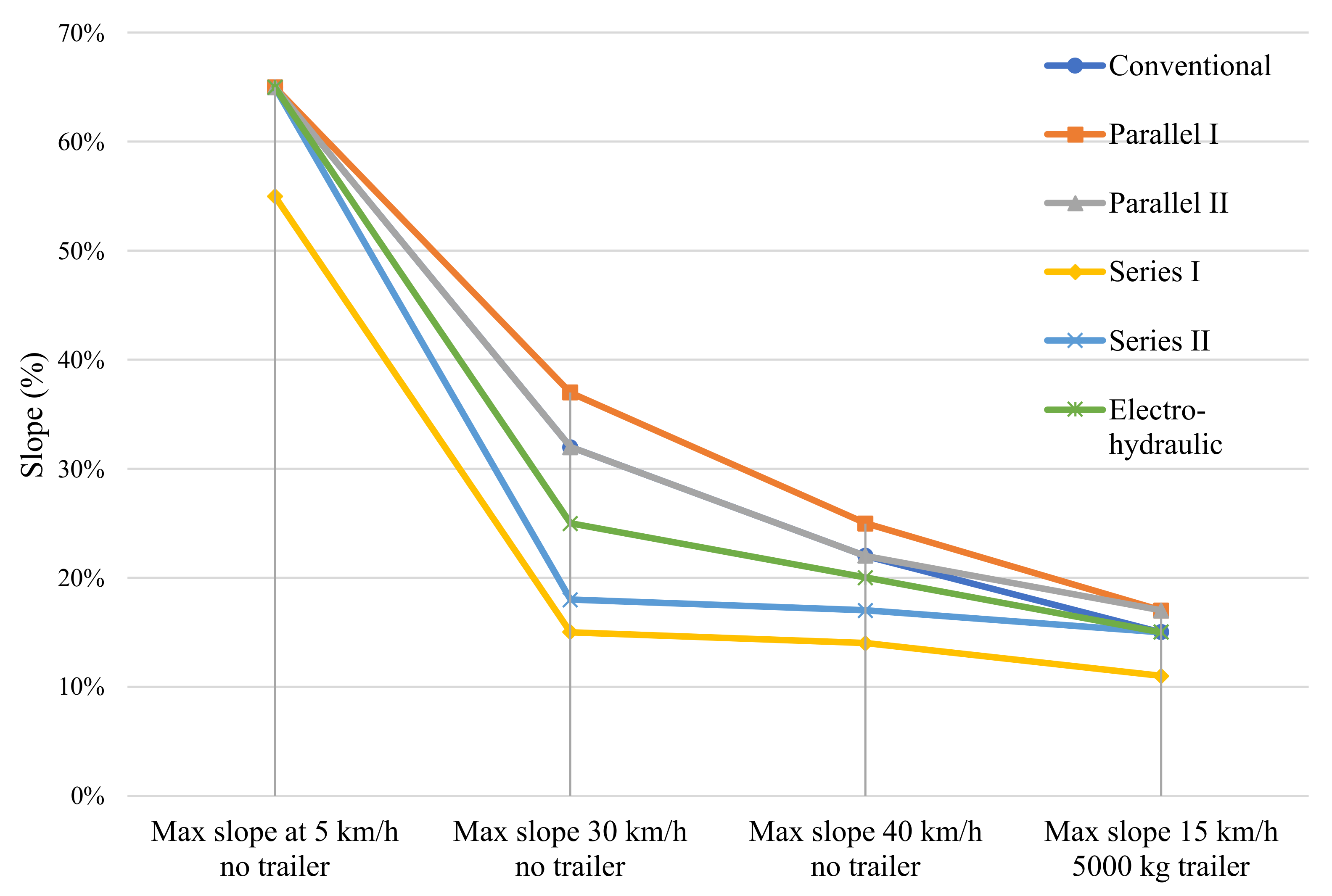
Another important test to evaluate peak power capabilities is the slope test, both with and without an attached trailer. In the first case, it is possible to evaluate the limit conditions in terms of maximum affordable slope and consequently the maximum reachable speed. In the second case, it is interesting to investigate the limit payload compatible with a certain slope. Of course, in this scenario the number of possible combinations to be investigated can increase very quickly; thus, some of the most representative operating conditions were considered. In particular, the following tests were performed:
Approaching of slopes at 5 km/h, 30 km/h and 40 km/h with no trailer.
Approaching of slopes at 15 km/h with a trailer of 5000 kg.
Figure 16 shows a summary of the results obtained by this set of tests. It is important to highlight that the numerical simulations were performed from standing starts at the base of the prescribed slope. As expected, with slopes tests being representative of peak power capabilities, the results confirmed the performances stated by the acceleration tests. The Parallel I and II HET architectures were confirmed to be the best options for performing better or at least as well as with the conventional powertrain in terms of peak performance. Additionally, in this case, the electro-hydraulic model was confirmed to have good performance with respect to the conventional powertrain but with the benefit of introducing CVT capabilities, and allowing for better control of the optimal ICE working point, decoupling it from the wheels. Additionally, in this case, the two series HET architectures did not excel in covering peaks in power demand, at least for the proposed configuration of the electric systems.
3.3. Energy Consumption Analysis
In the previous sections, peak power capabilities for the proposed HET architectures were explored to compare their performances with that of a conventional diesel-powered tractor. In this section, data were gathered to state the overall energy consumption of the proposed architectures, and thus their efficiency in daily working activities. For this reason, working scenarios involving external implements were considered to also explore performance in field activities.
Table 7 summarizes the results for this group of performance tests.
To properly approach these results, it is important to mention that
Table 7 shows the differences between the overall energy required by the conventional powertrain to accomplish a specific task and the energy required by the respective proposed HET architectures to perform the same task. Thus, for the hybrid powertrains, the energy required to accomplish the simulated task was calculated as the sum of the kWh of electric energy coming from the battery pack, obtainable through the SOC level reduction, and the kWh of chemical energy produced by the fuel consumed, obtainable from the fuel consumption model presented in
Section 2.1. The energy from the battery pack and the equivalent energy associated with a certain fuel consumption were summed to obtain the total energy required to accomplish the simulated task. Thus, this value intrinsically takes into account all the efficiency conversions in the chain: from tank to engine shaft, from battery to motor shaft and from generator shaft to motor shaft. The authors also want to highlight that this analysis did not aim to provide the exact values of energy consumption, which surely would require experimental characterization and validation of the models for each of the proposed HET architectures. Instead, the point was to perform a relative comparison with respect to the energy consumption of the conventional powertrain model. In this way, it was possible to highlight how all the different energy conversion efficiencies affected the final performances of the HET solutions.
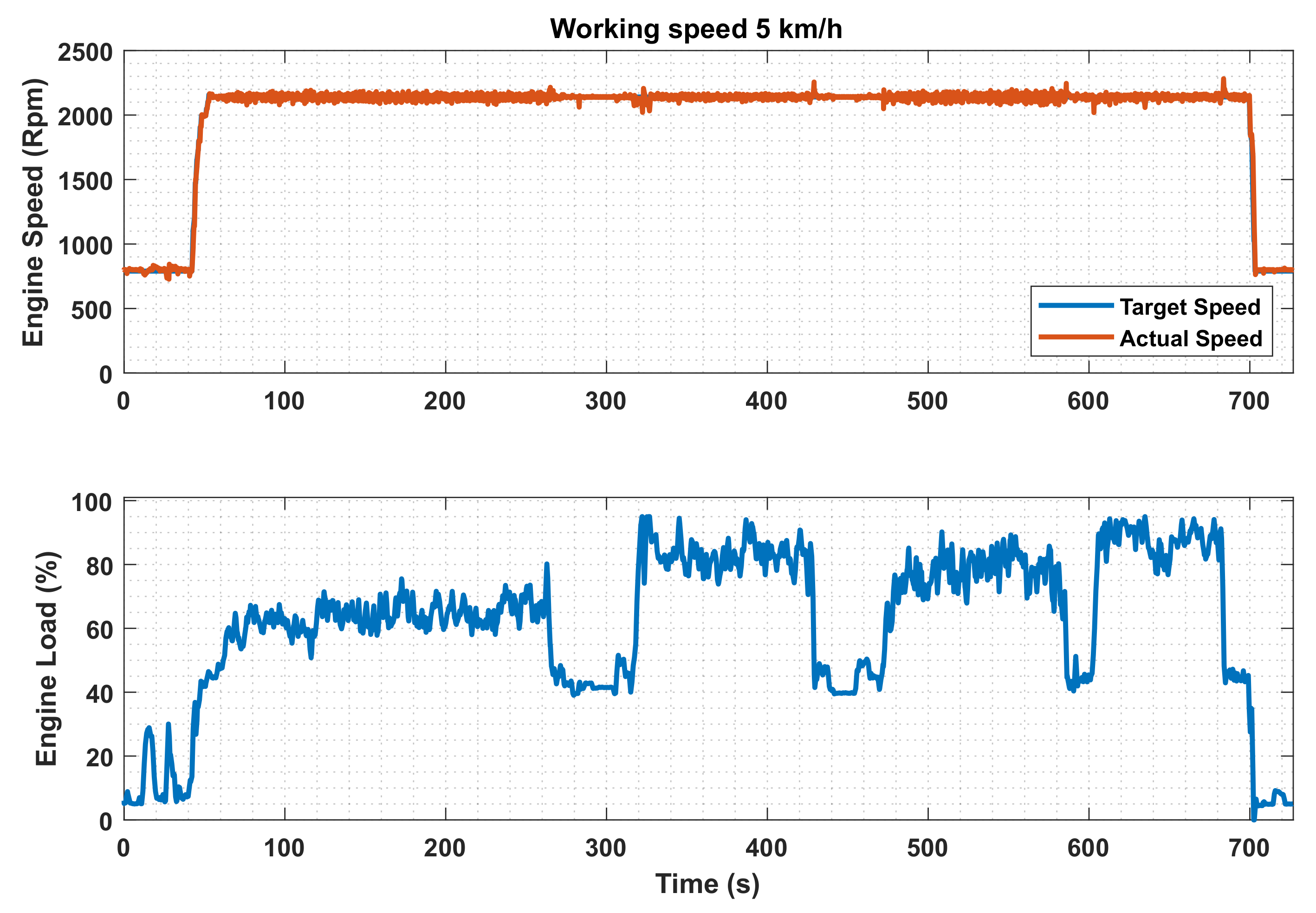
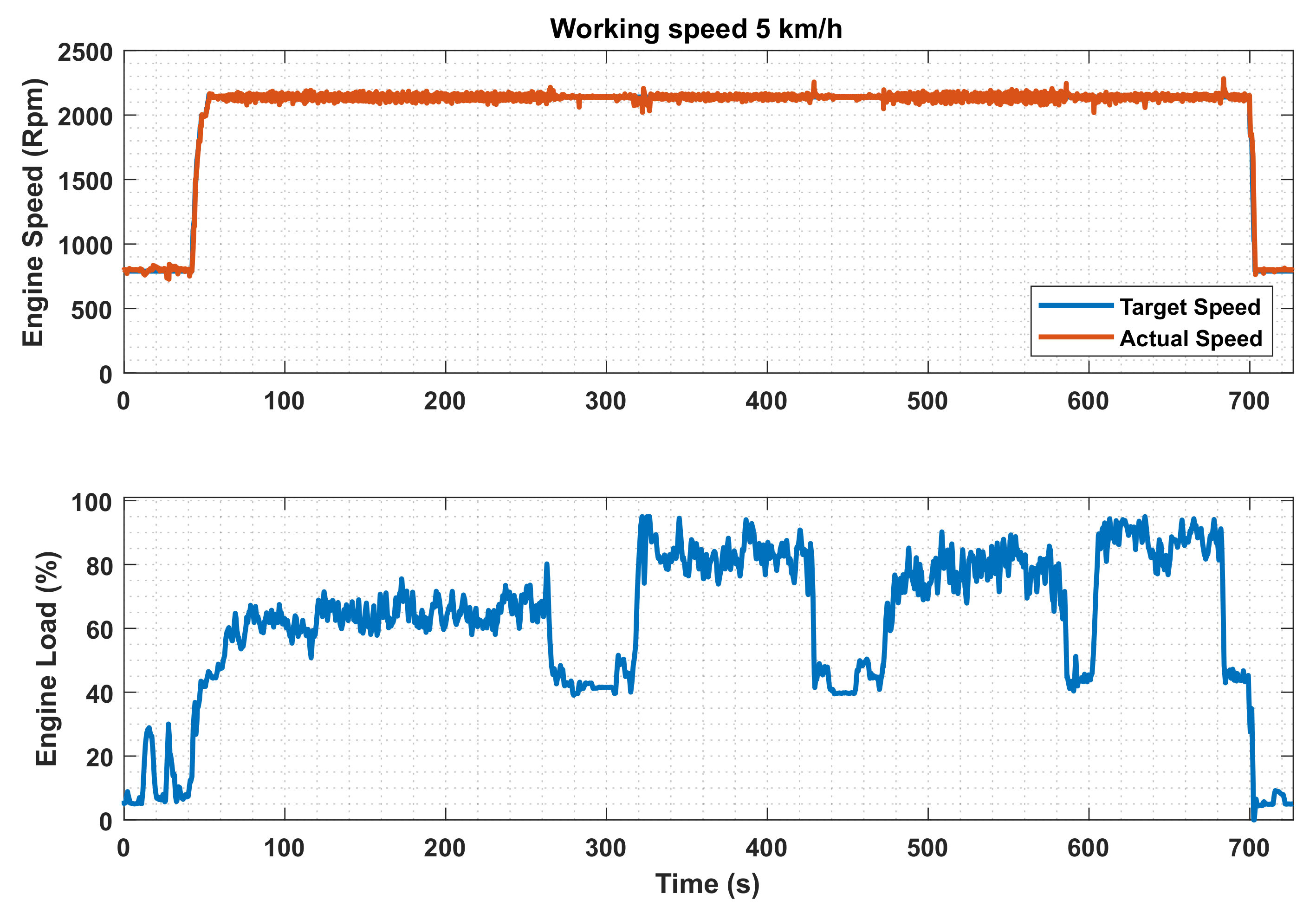
During tests with shredder, atomizer and rotary harrow, the tractor speed was fixed at 5 km/h, as measured during experimental tests conducted in previous works. As for the handling trailer tests, they consisted of evaluating the energy consumption while pulling the trailer at the constant speed of 40 km/h. These tests were all performed in CD mode to have the same energy management strategy among all the HET architectures. From results in
Table 7, it is possible to see that all the HET architectures can achieve better energy efficiency in all the proposed working scenarios if compared with a conventional architecture. One of the main reasons is surely the adoption of a smaller diesel engine working closer to its high efficiency points. In these set of performance tests, both Series I and Series II HET architectures achieved better overall energy efficiency, despite the double energy conversion involved when the generator needed to provide power for the high voltage bus to supply the motor. The results confirmed the difficulty in energy consumption optimization for the parallel architectures because of the direct mechanical connections between the engine and the wheels. This consideration was validated by the results for tests involving external implements. In these test cases, both the constant vehicle speed and PTO speed allowed one to have the engine as close as possible to a high efficiency working point, in accordance with the set of gear speed combinations within the transmission. Thus, the overall energy consumption is comparable in both parallel and series HET configurations. Unfortunately, in this type of analysis the electro-hydraulic HET solution showed its main drawback: the CVT function comes at the cost of a higher overall use of the available energy (both from the tank and from the BESS).
3.4. Work Cycle Analysis
Finally, two work cycle analyses were performed to evaluate the design characteristics of the proposed BESS in daily load profiles, estimating this time the amount of fuel saving with respect to the traditional powertrain.
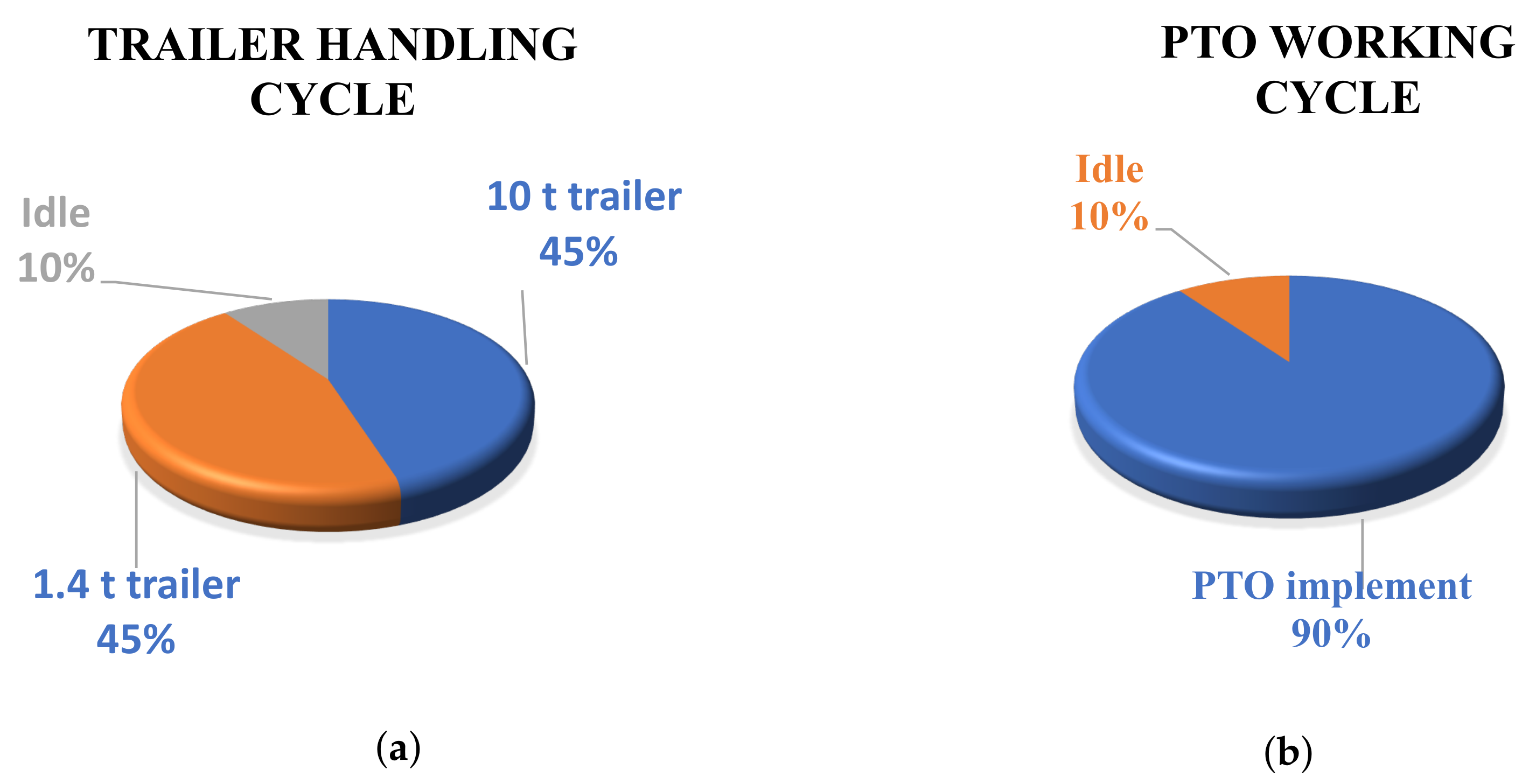
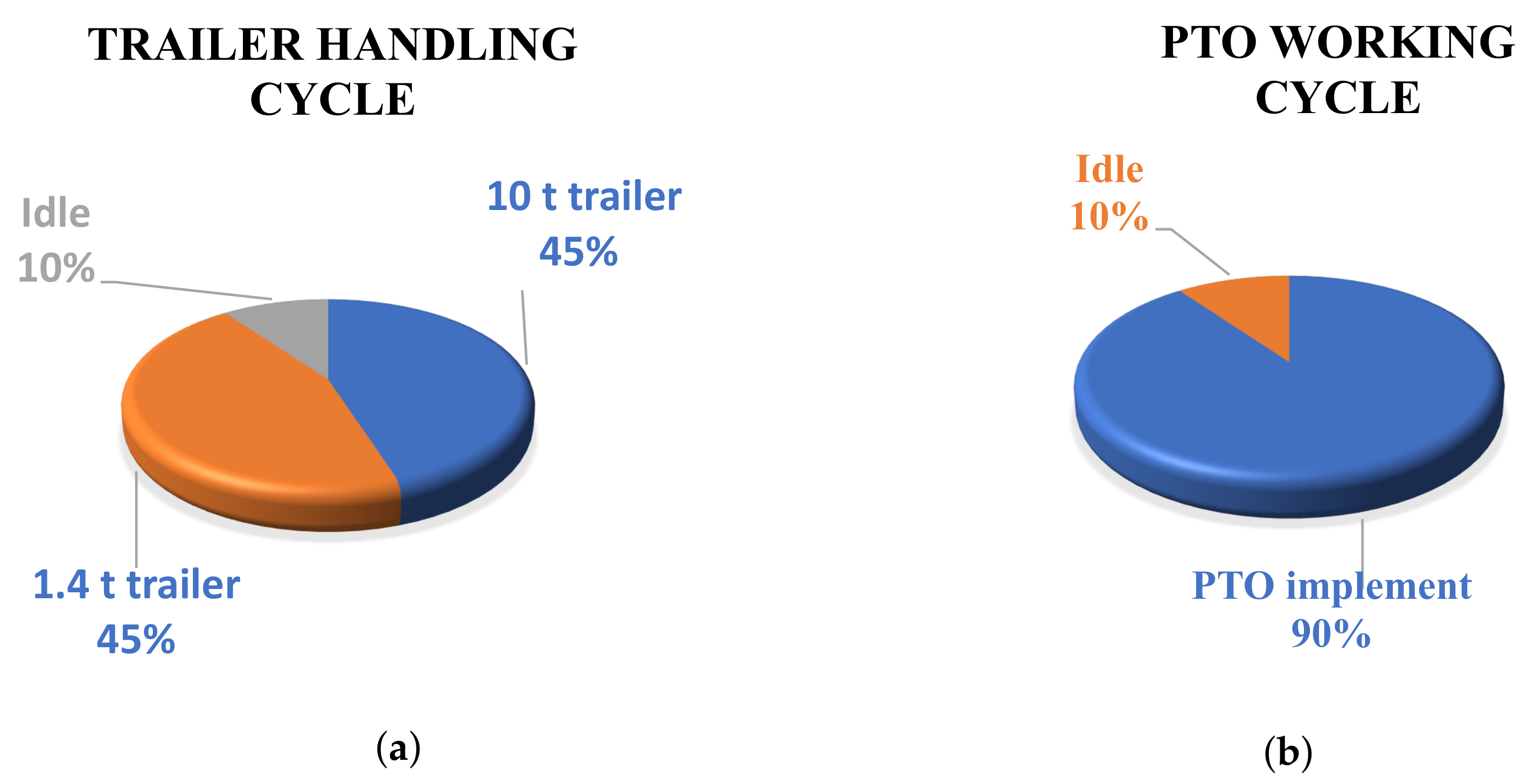
The proposed tests consisted of a full day of transportation and of a PTO-powered external implement. For the purpose of this analysis, a workday of 8 h was considered. For the transportation work scenario shown in
Figure 17a, we used had the tractor traveling at maximum speed with a full load (10,000 kg) for 45% of the time and at maximum speed but with the minimum trailer mass (1400 kg) for 45% of the time. The remaining 10% was imagined as idle time, or moments when the tractor is powered on but it is not actually working (this happens very often in those moments wherein the trailer needs to be fulfilled or emptied). For the PTO work scenario, a more simple but critical load profile was identified, as shown in
Figure 17b, with continuous PTO work for almost 90% of the time, and again 10% of idling time for all those moments regarding mounting and dismounting of the tool or other related operations. In order to optimize the BESS use, the hybrid powertrains were controlled to recharge the batteries when idling.
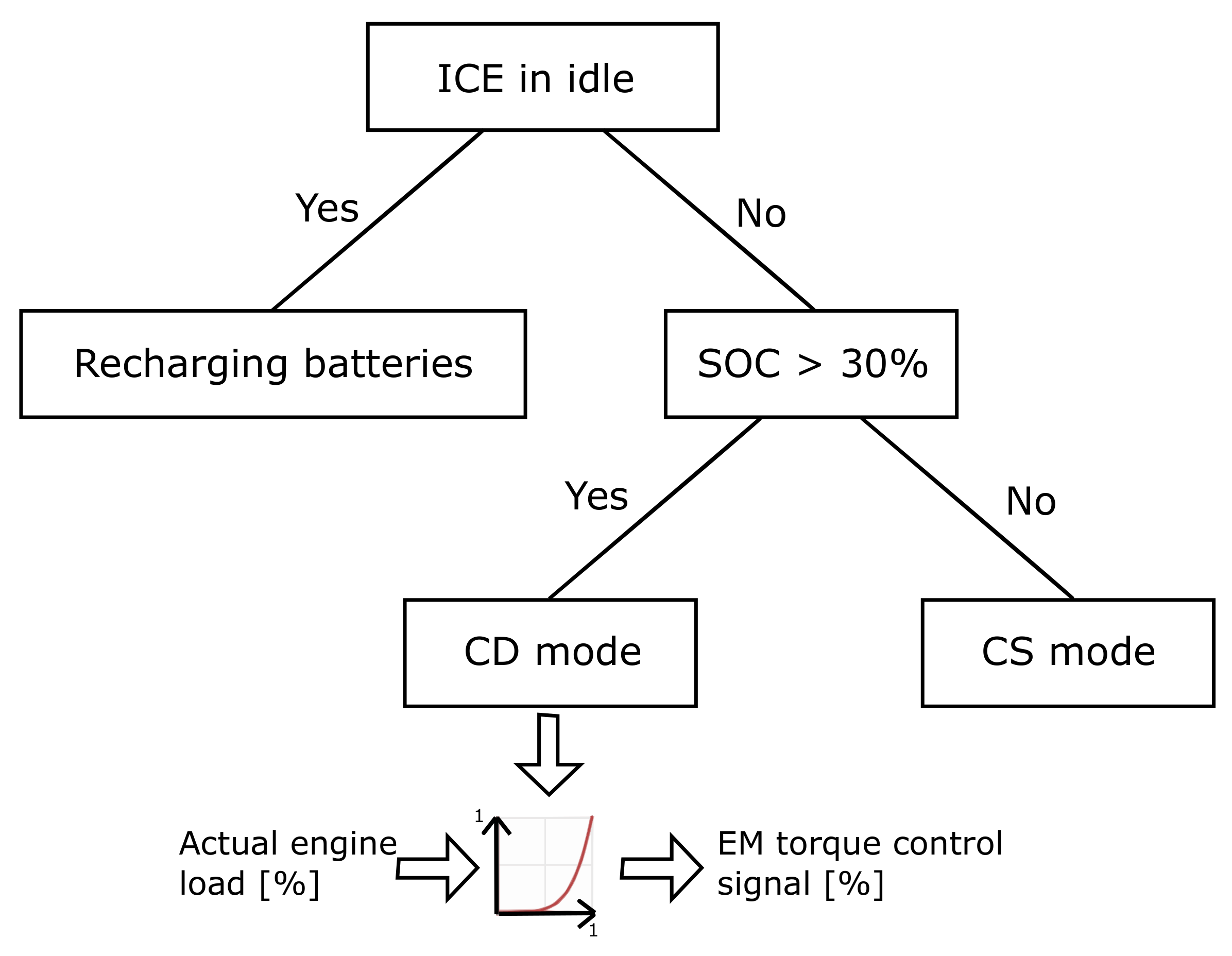
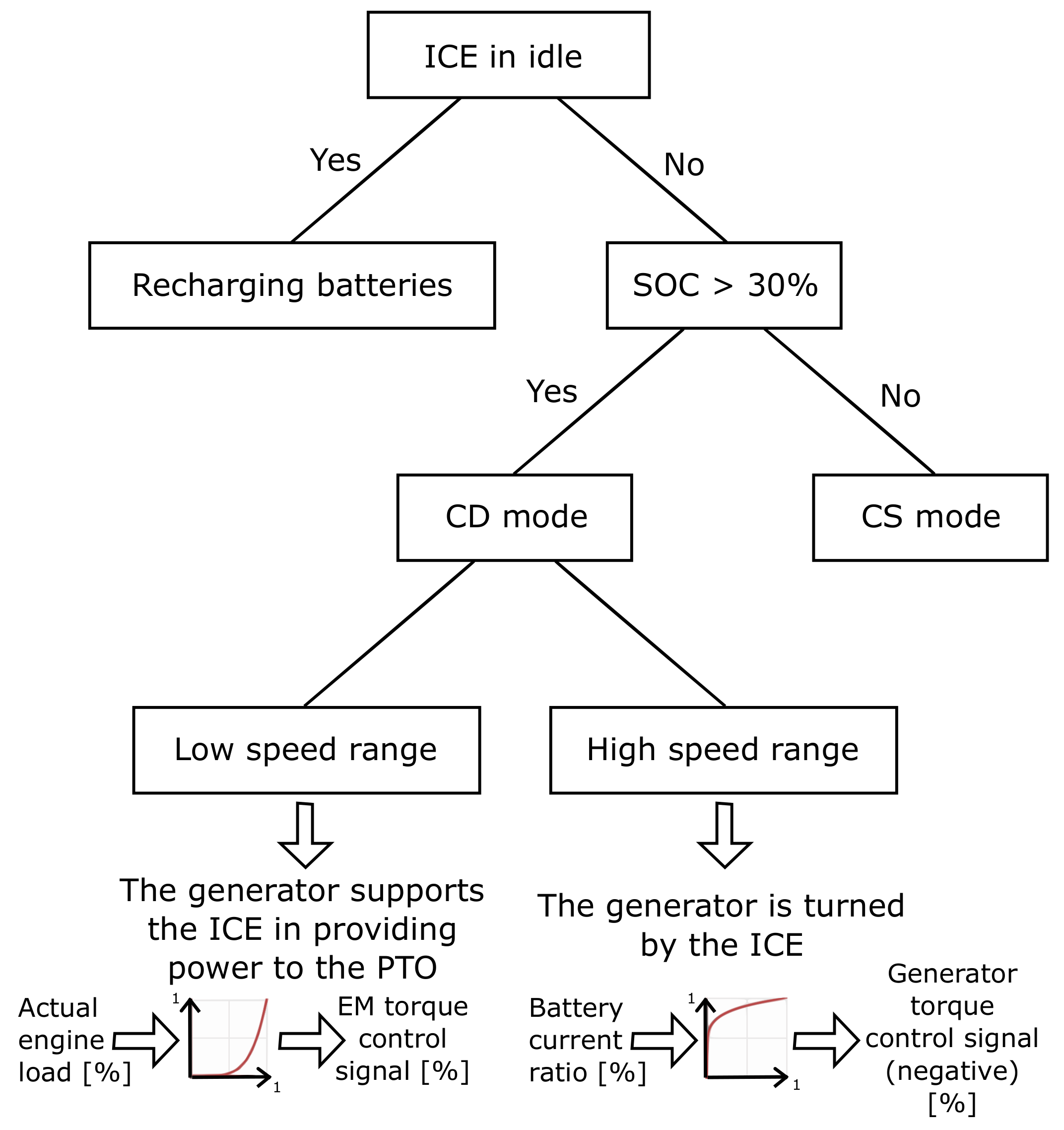
Table 8 shows the numerical outcomes of the proposed tests in terms of fuel saving with respect to the conventional powertrain. A traditional tractor is supposed to be able to complete the 8 h working cycles, and in very exceptional and intensive cases, it is possible to refuel it in a very short time. On the other hand, the autonomy is an aspect of primary importance in electrified working vehicles, because it could affect negatively a company’s productivity if it is not able to complete the planned activities. This is the reason why, looking at the working day, the CS mode of the energy management strategy is crucial to find the correct balance between the BESS discharge and overall autonomy of the proposed HET configuration. Results show that the parallel and series HET architectures managed to accomplish the proposed tasks with better fuel efficiency compared to the conventional powertrain. In particular, the series HET recorded 20.4% fuel savings in the handling trailer cycle, mainly because of the absence of the mechanical link between the thermal unit and the wheels, allowing it to work around its optimal working point. The electro-hydraulic powertrain, instead, was not able to complete the rotary harrow working cycle because of the higher power losses in the hydraulic system. The failure of the test was stated when the energy consumption of the BESS went beyond its maximum storage capability. This means that, in this case, the only way to complete the cycle was to change the working parameters to limit the energy consumption. However, this may translate in productivity reduction, or in the worst case, to not being able to perform that type of task.
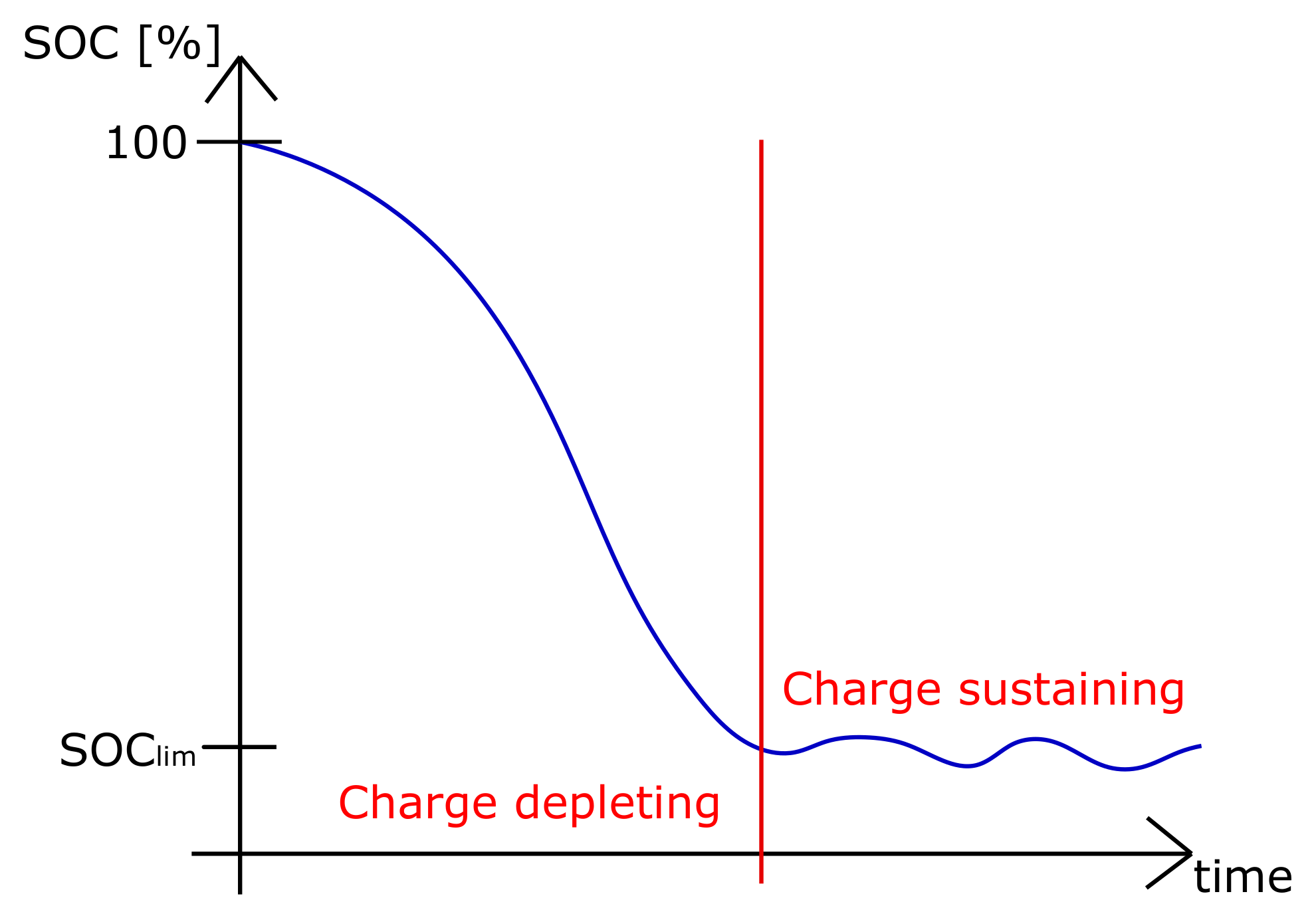
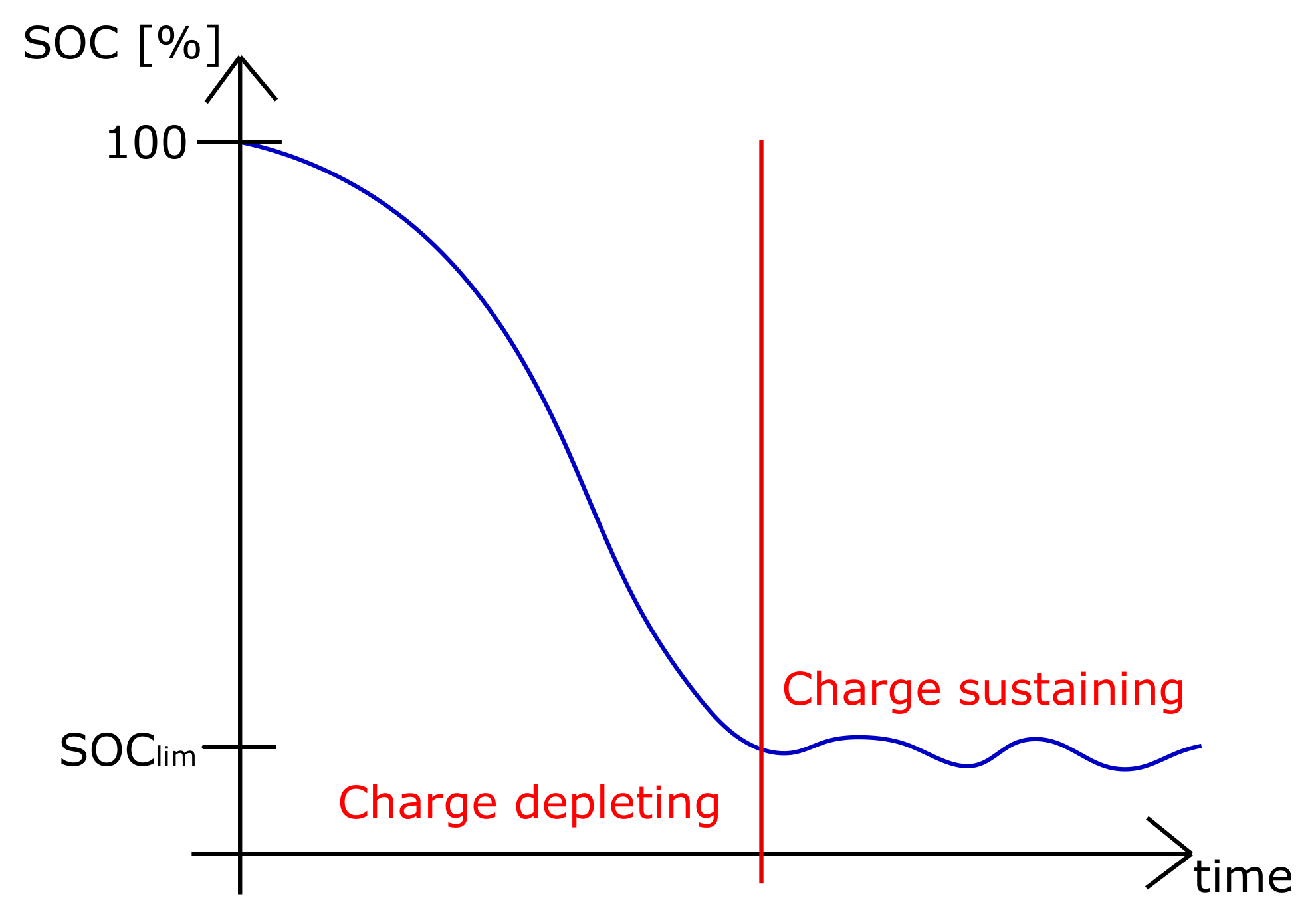
As for the HET, at the end of each proposed working cycle, the SOC level was generally at 30% due to the CD mode, apart from the handling trailer cycle, where the Parallel I, Parallel II and electro-hydraulic had SOC slightly above that value. Therefore, this combination of CD and CS mode is optimal when the battery pack has the possibility of being recharged through a plug-In system. In this way, after completing the working day, the tractor can be recharged, and its SOC level can be brought back to 100% for the next working day.
4. Conclusions
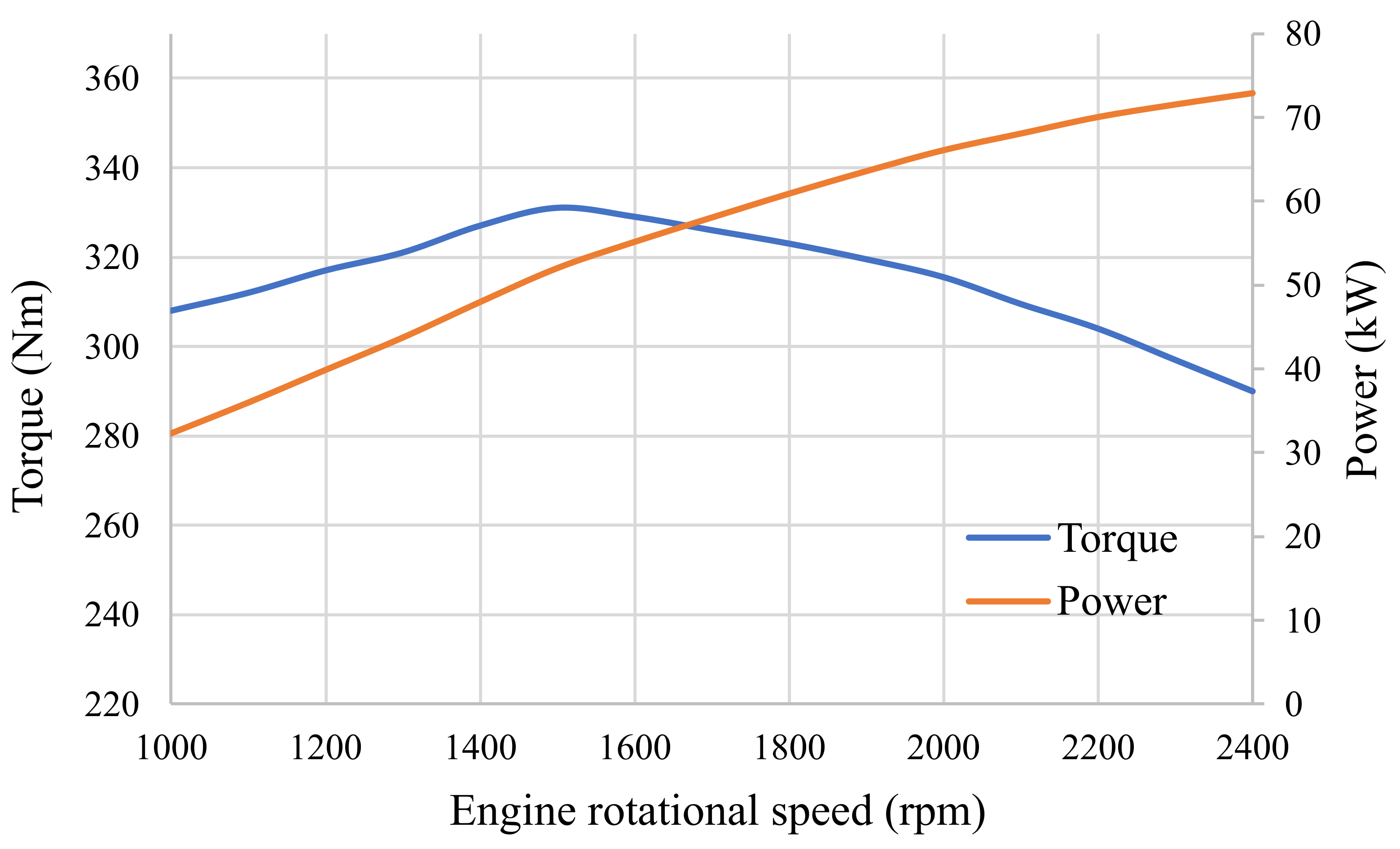
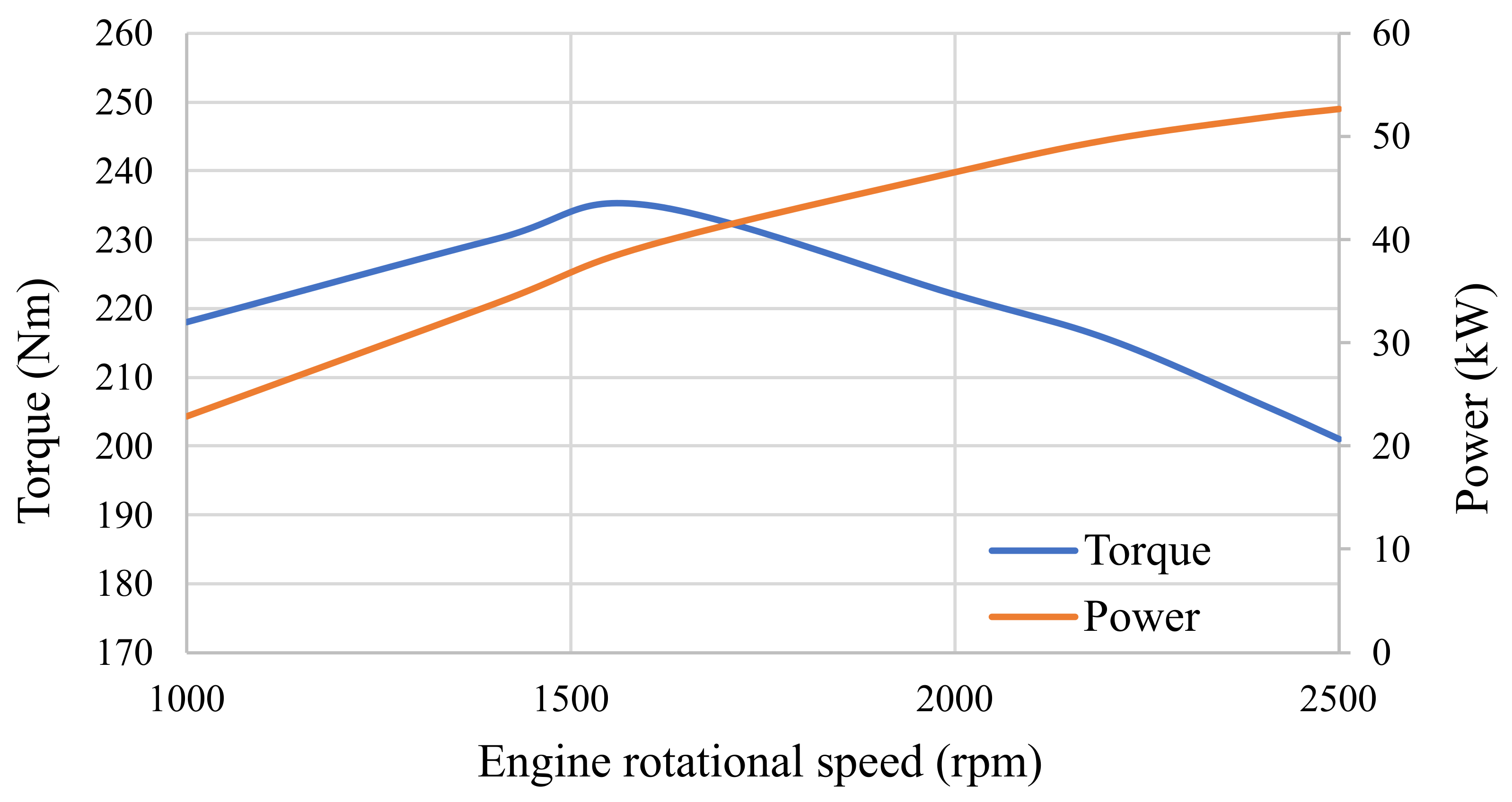
In literature, some works on the hybridization of agricultural tractors have been proposed. However, to the authors’ knowledge, there is no clear answer on what hybrid architecture could better fit specific class of tractors. In case of an orchard tractor, hybridization of the powertrain should consider the different kinds of problems that affect these vehicles. In particular, highly variable work scenarios, peak power capabilities, endurance and onboard space availability may represent true challenges in the design of the electrified powertrain. Therefore, this work aimed at highlighting the benefits and drawbacks of different hybrid solutions considering the requirements of this specialized vehicles. In this work, a numerical comparative analysis between the performance of a conventional specialized orchard tractor, propelled by a diesel-powered engine with nominal power of 73 kW, and the performances of three different HET solutions, adopting a downsized 53 kW diesel engine, was presented. Peak power capabilities and energy consumption of the conventional and HET architectures were numerically tested in a specific set of working scenarios related to experimental field measurements from previous works. For each HET architecture, an energy management strategy was proposed to properly split the power between the thermal and the electric units. These strategies were designed to prefer the ICE as primary power source and used two main operating modes depending on the BESS SOC level: charge depleting (CD) and charge sustaining (CS). Simulations were carried out to evaluate the efficiency improvements and fuel savings of the HET architectures compared to the conventional powertrain. Since the onboard BESS is the most critical energy source, for all the HET configurations, the same capacity was used. Therefore, simulations also allowed to establish the feasibility of both the voltage and capacity of the proposed BESS according to the proposed mission profiles. The results showed that HET solutions managed to have performances comparable to and even better than the conventional architecture. Moreover, they managed to achieve better fuel efficiency during normal working activities thanks to the use of a downsized engine instead of an oversized one. The downsized engine, moreover, could lead to a lower environmental impact of the vehicle and to a cost reduction for the required exhaust gas after-treatment system. Among the proposed HET solutions, parallel HET configurations performed better in terms of peak power capabilities, whereas series HET ones showed better overall efficiencies, and thus greater fuel savings. Moreover, the series HET undoubtedly presented advantages in simplifying the transmission, which can be translated into greater constructive simplicity. An electro-hydraulic HET configuration was also proposed in this work as a trade off between the need for a smaller diesel engine, helped by the electric motor, and the CVT capabilities. Performance tests showed good peak power capabilities, but lower overall efficiency due to the introduction of hydraulic losses in the hydrostatic transmission. Future works will focus on improving the limits that characterize the proposed architectures. Moreover, a deeper investigation of the control strategy should be a subject of research, since it could affect in a relevant way the performance and fuel consumption of the tractor. In addition, a deeper investigation of the battery pack and its sizing, according to the onboard space availability, deserves study. Other architectures, such as a powersplit hybrid, that theoretically could combine the advantages of both the parallel and series HET, might be explored in future research activities.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}