
Detection and Diagnosis of Dependent Faults That Trigger False Symptoms of Heating and Mechanical Ventilation Systems Using Combined Machine Learning and Rule-Based Techniques



Abstract
:1. Introduction
- One fault has a positive or negative impact on another fault;
- Two faults occur but their combined effect is not observed on the third sensor, which indicate normal operation; and
- Two faults occur, but only the effect of one fault on the third sensor is observed.
2. Literature Review
2.1. Quantitative Models (Physics-Based Models)
2.2. Qualitative Models (Rule-Based Models)
2.3. Process History-Based Models (Data-Driven Models)
2.4. Discussion
- Synthetic faulty data were used to develop support vector machine (SVM) models for single and multiple FDD in air handling units (AHU), centrifugal chillers and other HVAC equipment/systems [7,34,35,36,37,38,39,40]. Support vector regression (SVR) models were applied for single FDD [41,42,43,44,45].
- Artificial neural network (ANN) models [46,47], with only one hidden layer, have been used for single and multiple FDD. Shallow feedforward ANN that has only one hidden layer was used for MFDD in AHUs using experimental data [48]. ANN model was also applied by [49,50] using simulated data set from EnergyPlus and TRNSYS for multiple faults detection in HVAC systems.
- Deep artificial neural network (DANN) that consists of two or more hidden layers was applied in some studies using synthetic or experimental data for single and multiple FDD in the HVAC systems [48,51,52,53,54]. The selection of the optimum number of hidden layer neurons methods was proposed by [55,56,57,58].
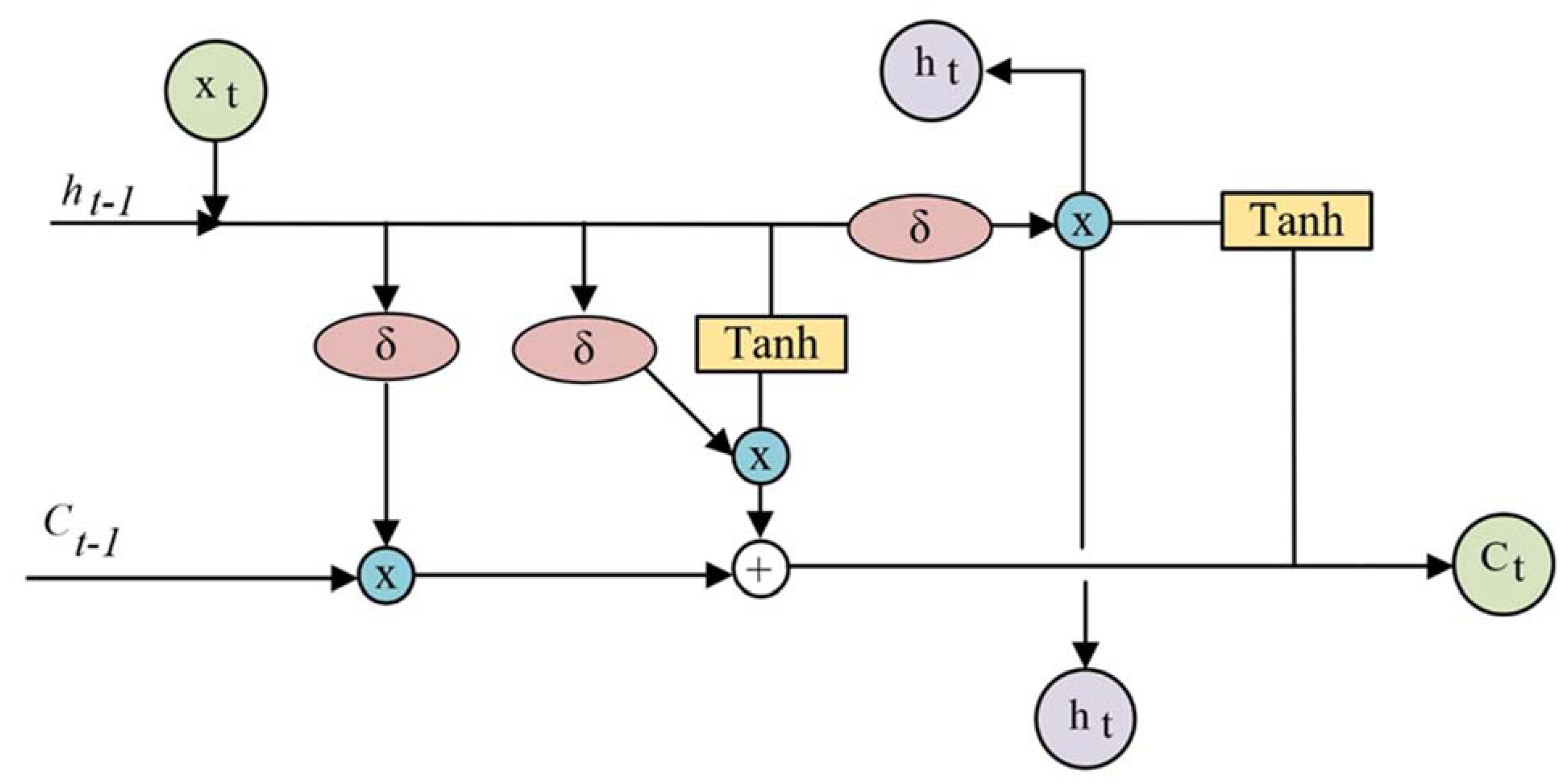
- The recurrent neural network (RNN), another deep learning method, which includes long-short-term memory (LSTM) architecture, was developed for multiple FDD using synthetic and measured databases [59]. The LSTM is capable of adding, storing and removing the information that is helpful for predictions [60].
- Hybrid models accounted for 22% of the total number of studies, ANN and SVM accounted each for 22%, K-NN 17%, Bayesian network 11%, rule-based 5%, decision tree 5%, random forest 5%, clustering 5%, SVDD 5%, Deep ANN 5%, CNN 5%, and linear regression and linear discriminant analysis accounted each for about 5% of total publications.
- Measurements’ data were used in 67% of the publications, while synthetic data were used in 33%.
- About 44% of the publications focused on the FDD models for AHUs, 33% on chillers; other HVAC systems/components (i.e., whole HVAC system, packaged rooftop unit, and ground source heat pump) accounted each for 5% of studies.
- While most publications presented FDD methods for one faulty sensor, a smaller number of publications covered the multiple dependent FDD (sequential or concurrent) in HVAC systems.
- -
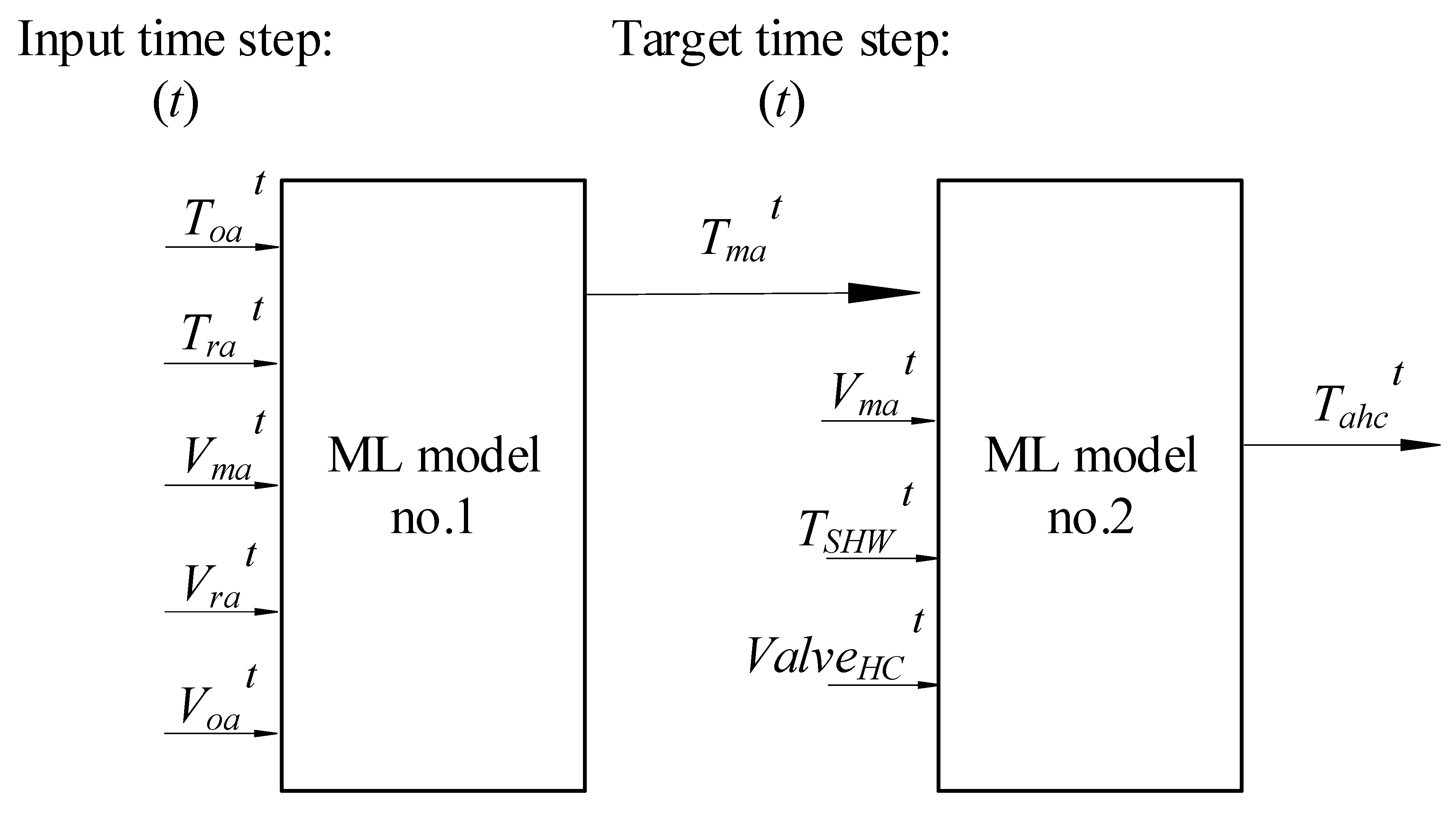
- A novel sequential (compound) machine learning model for the prediction of the target variable (Tma and Tahc) in the AHU for the scope of MDFDD was proposed.
- -
- A novel technique for the threshold definition for the scope of MDFDD was proposed, which combines the sensor uncertainty and ML model uncertainty.
- -
- A hybrid technique, which combines machine learning models and rule-based techniques, was proposed for the MDFDD of the air temperature sensors in an AHU.
- -
- Different machine learning, deep learning, and hybrid models for the MDFDD scope were developed with the application of the K-fold cross validation of models.
3. Case Study
4. Method
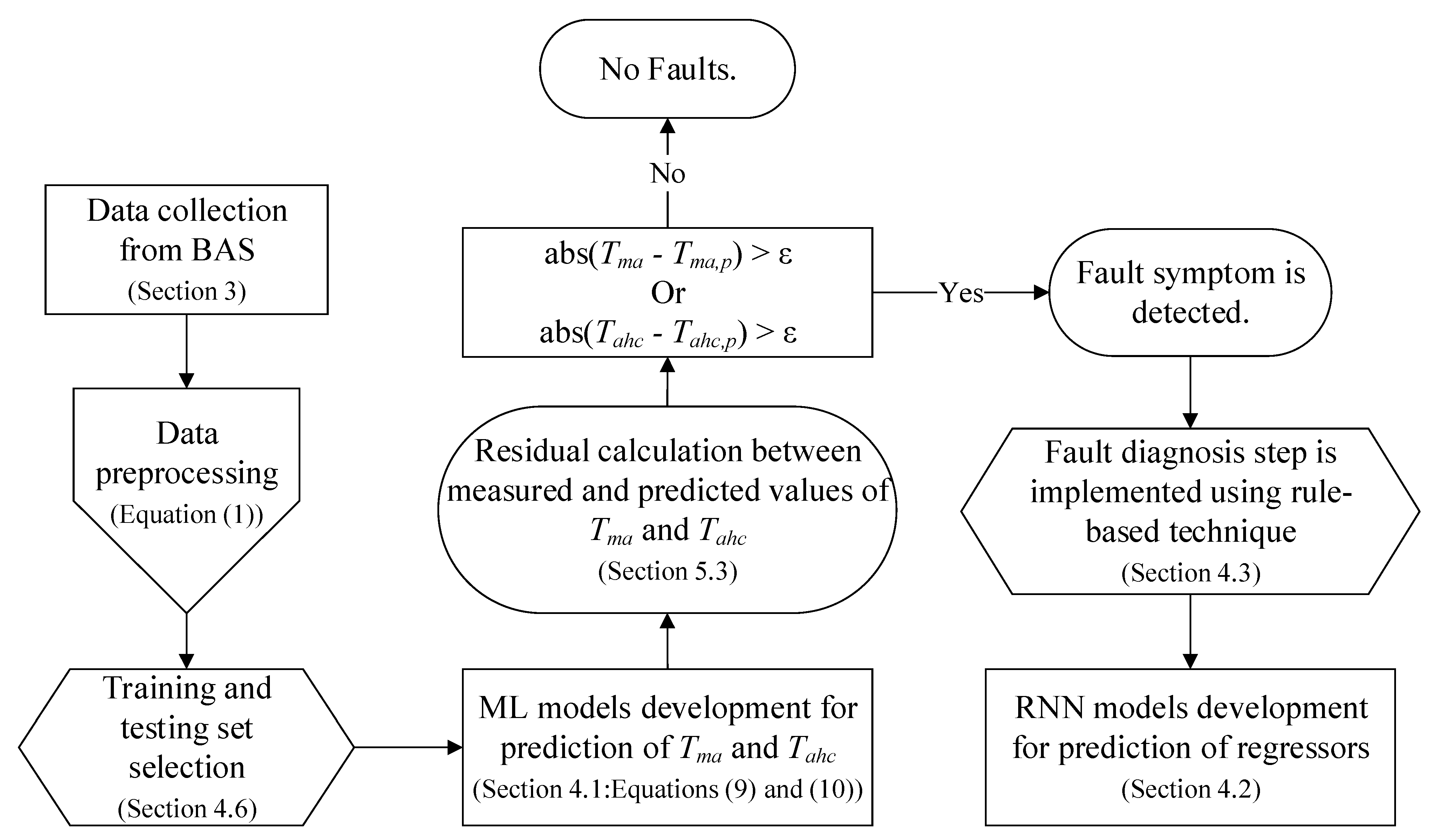
- (1)
- Data collection from BAS.
- (2)
- Data pre-processing for quality control, missing data, and data normalization. Measurements X that does not respect Equation (1) are removed.
- (3)
- Selection of training and testing data sets.
- (4)
- ML model development for the prediction of first target sensor (Tma).
- (5)
- ML model development for the prediction of second target sensor (Tahc).
- (6)
- Calculation of residuals between measured and predicted values of Tma and Tahc, respectively.
- (7)
- Detection of fault symptom.
- (8)
- Application of rule-based technique for the fault diagnosis step.
4.1. Fault Symptom Detection Model Using Support Vector Regression (SVR)
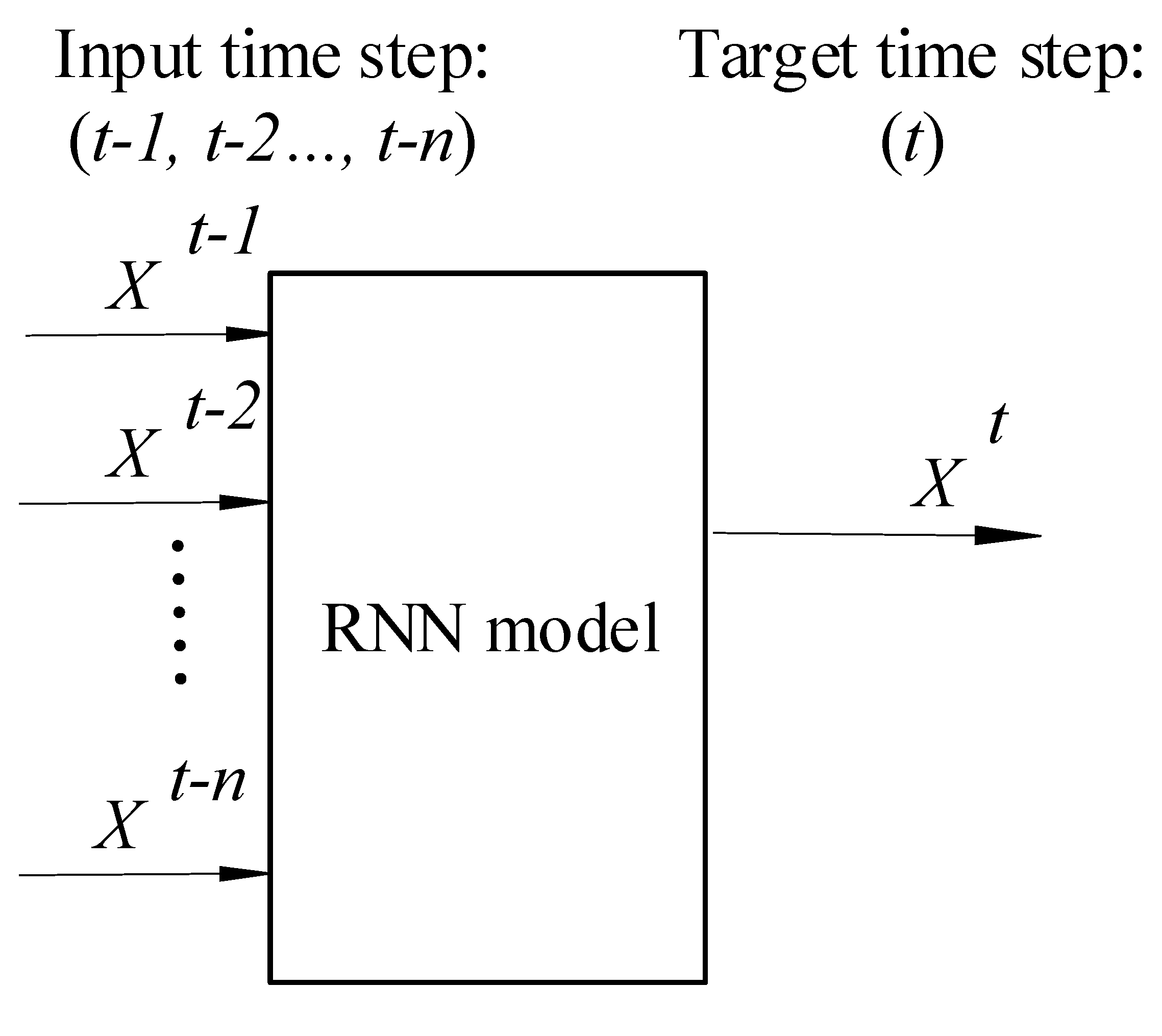
4.2. Recurrent Neural Network (RNN) for Prediction of Regressor Sensors
4.3. Fault Diagnosis of Sensors Using Rule-Based Models
- A.
- Group A of rule-based models
- If Resoa = abs(Toa − Toa,p) > ε, and Resma = abs(Tma − Tma,p) > ε, then both Tma and Toa sensors have fault symptoms.
- If Resra = abs(Tra – Tra,p) > ε, and Resma = abs(Tma − Tma,p) > ε, then both Tma and Tra sensors have fault symptoms.
- If Resoa> ε, and/or Resra > ε, and Resma = abs(Tma − Tma,R) < ε, then Tma sensor is not faulty; and Toa and/or Tra sensors are faulty.
- If Resoa < ε, and/or Resra < ε, and Resma = abs(Tma − Tma,p) > ε, then only Tma sensor is faulty.
- If Resoa > ε, and Resra > ε, and Resma = abs(Tma − Tma,P) > ε, then all three sensors, Toa, Tra, and Tma, are faulty.
- B.
- Group B of rule-based models
- If Res = (Tahc − Tahc,R) < ε, then Tahc sensor is not faulty.
- If Res = (Tahc − Tahc,R) > ε, then Tahc sensor is faulty.
- If the heating coil valve position (ValveHC) is recorded open with (ValveHC − ValveHC,p) < ε, abs(Tma − Tma,p) < ε, and (TSHW − TSHW,p) > ε, then the Tahc sensor is possibly faulty, and/or the hot water temperature is too high.
- If (ValveHC) is recorded open with (ValveHC − ValveHC,p) > ε, abs(Tma − Tma,p) < ε, and (TSHW − TSHW,p) < ε, then Tahc sensor is possibly faulty, and/or the heating coil valve might be stuck opened.
- If (ValveHC) is recorded open with abs(ValveHC − ValveHC,p) < ε, abs(Tma − Tma,p) < ε, and (TSHW − TSHW,p) < ε, the Tahc sensor is possibly faulty with positive bias.
- If (ValveHC) is recorded as closed, and abs(Tma − Tma,p) < ε, then ValveHC and/or heating coil leaks.
- If (ValveHC) is recorded open, and (Tma − Tma,p) > ε, then Tma sensor and/or Tahc sensor might be faulty.
4.4. Performance Evaluation
4.5. Fault Detection and Diagnosis Performance
4.6. Optimization of Training Data Sets for Model Development
- (a)
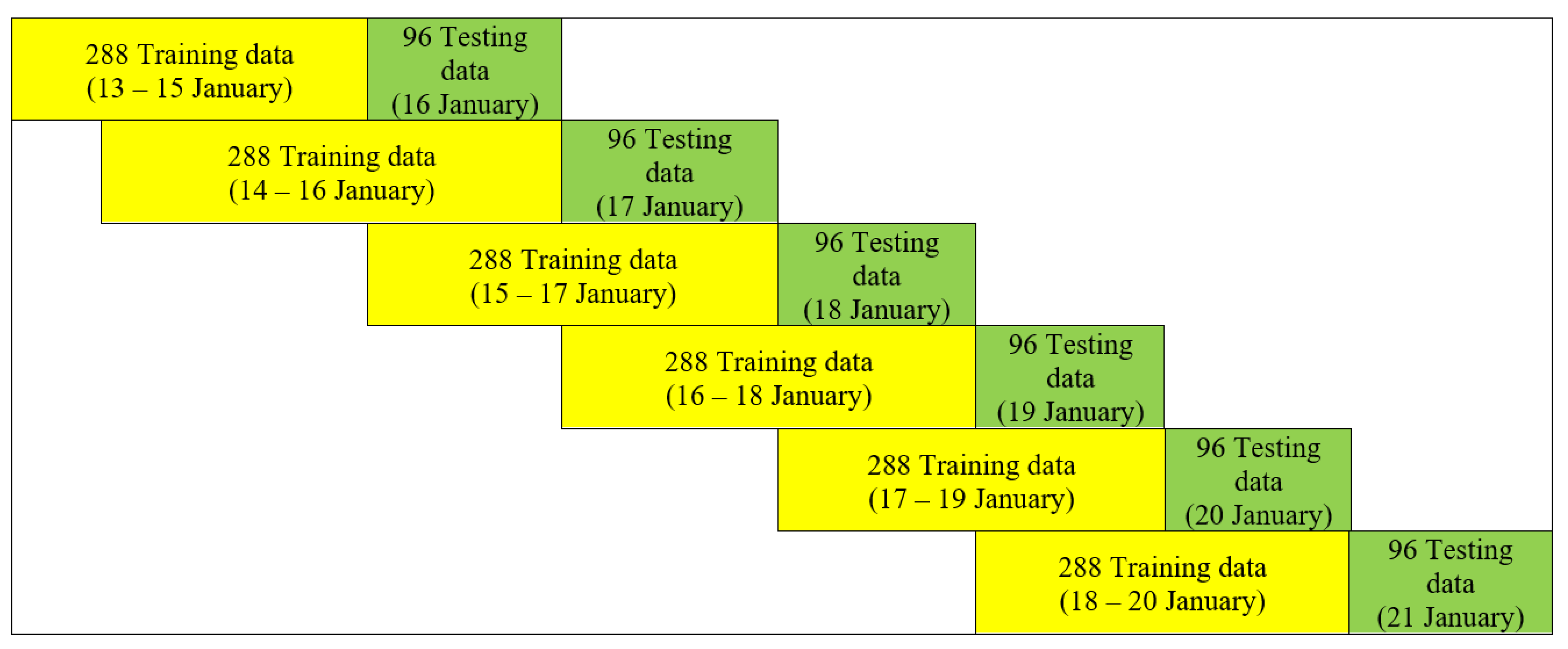
- Let’s assume, for the purpose of explanation, the length of training the data set was three days, including 288 data points, from 13–15 January (Figure 7) and was tested with data from 16 January (96 data points). A new training data set was selected, with the same length of three days, by applying the sliding window technique, from 14–16 January, and tested with data of 17 January. In all, the sliding window moved over six consecutive days. Hence, the 6-fold cross validation used six different training data sets. The average RMSE value of predictions of Tma over the corresponding testing data set was 0.41 °C. By using a similar approach, the average RMSE value of predictions of Tahc was 0.21 °C.
- (b)
- The sliding window technique was implemented in this paper to evaluate the length of training data set over the course of consecutive days.
- (c)
- Results from different training data sets with lengths of 288, 480, 672, 864, 1,056, and 1,248 data points measured at 15-min intervals were compared. The optimum length of training a data set for the development of ML models of Tma and Tahc was composed of 288 data points.
- (d)
- The RandomizedSearchCV tool, including 10 cross-validation and 30 times for the number of iterations, was applied to obtain the optimum values for the hyperparameters of the SVR model for the Tma and Tahc. The optimum values for Tma are C = 15.32 and γ = 0.015; and for Tahc are C = 12.87 and γ = 0.057; the kernel was set to RBF for all SVR models.
5. Results and Discussion
5.1. Detection of Faults of Tma Sensor under Normal Operation Conditions
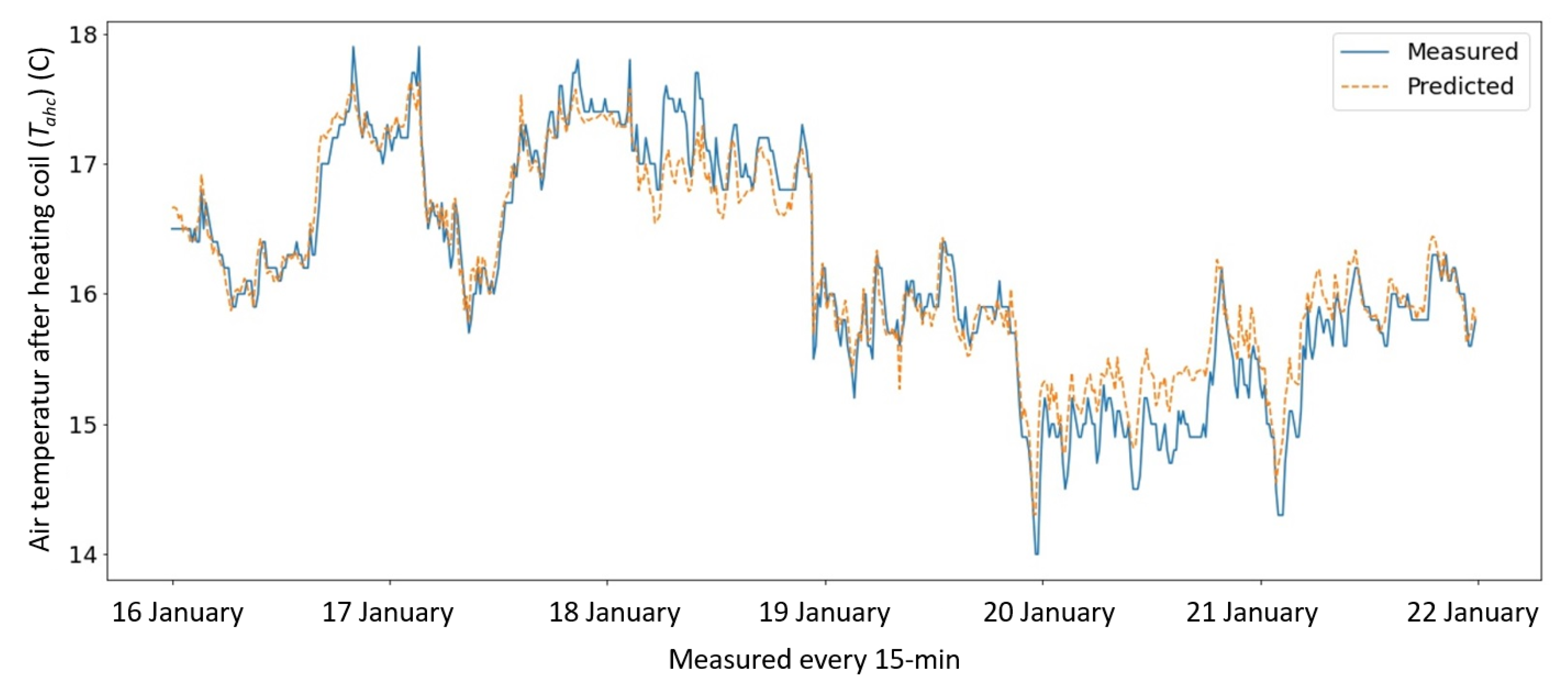
5.2. Detection of Faults of Tahc Sensor under Normal Operation Conditions
5.3. Detection and Diagnosis of Faults from Abnormal Operation Data
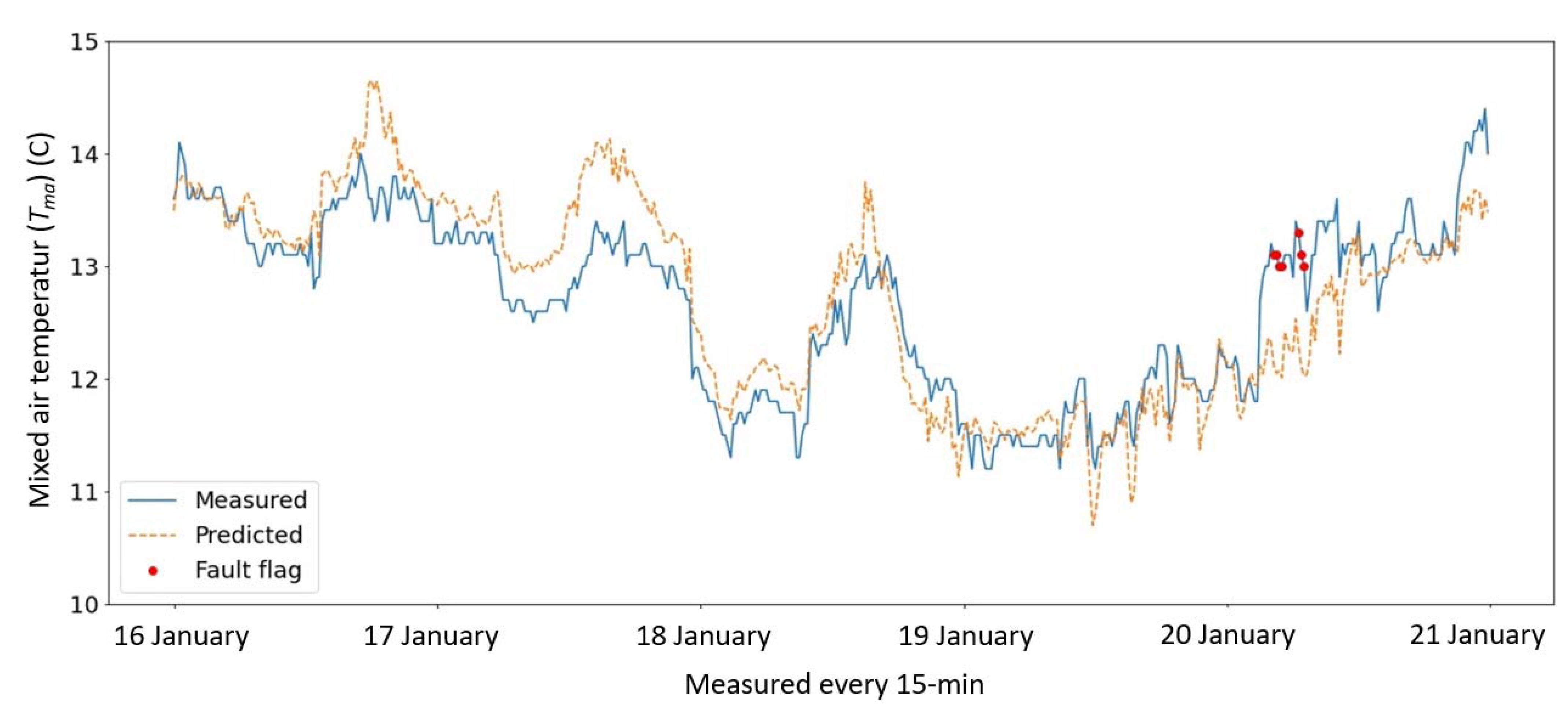
5.3.1. Detection of Fault Symptoms
5.3.2. Diagnosis of Faults
- (1)
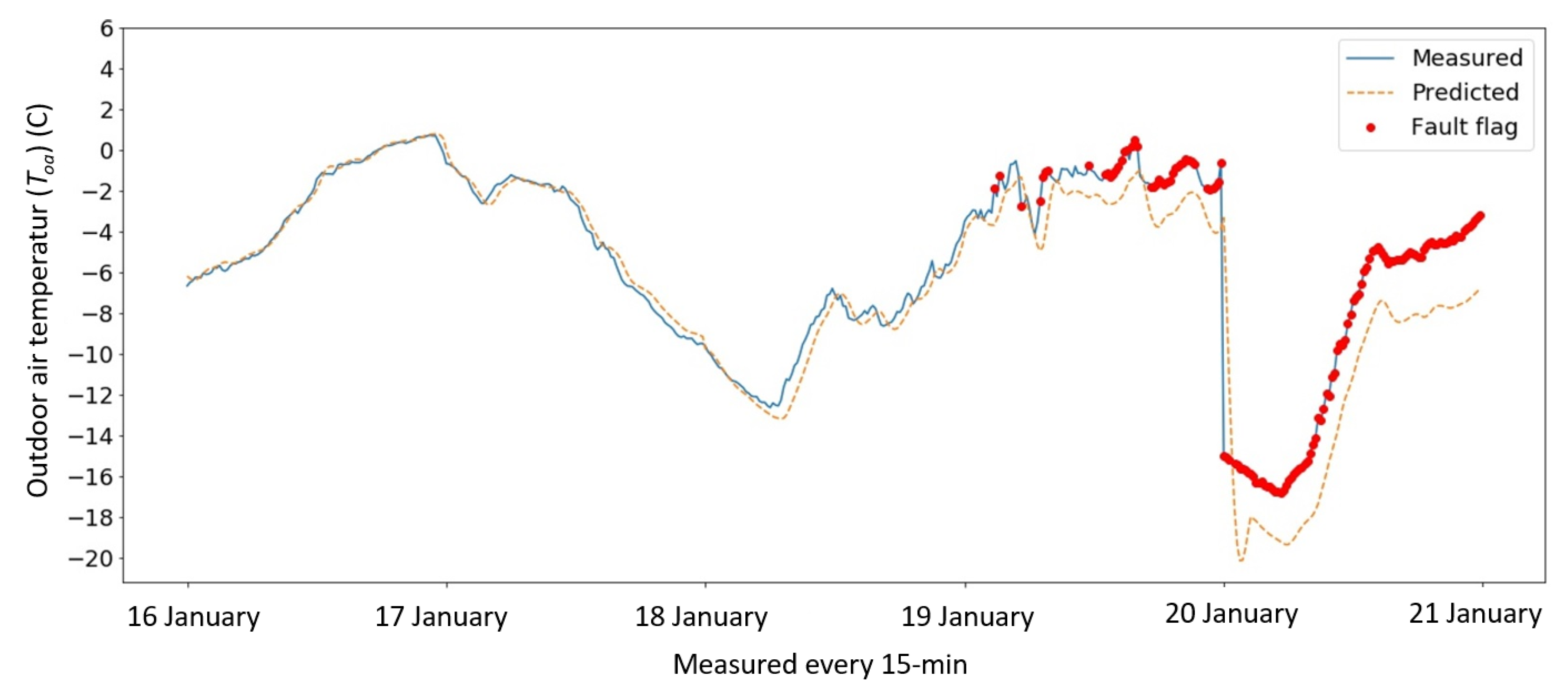
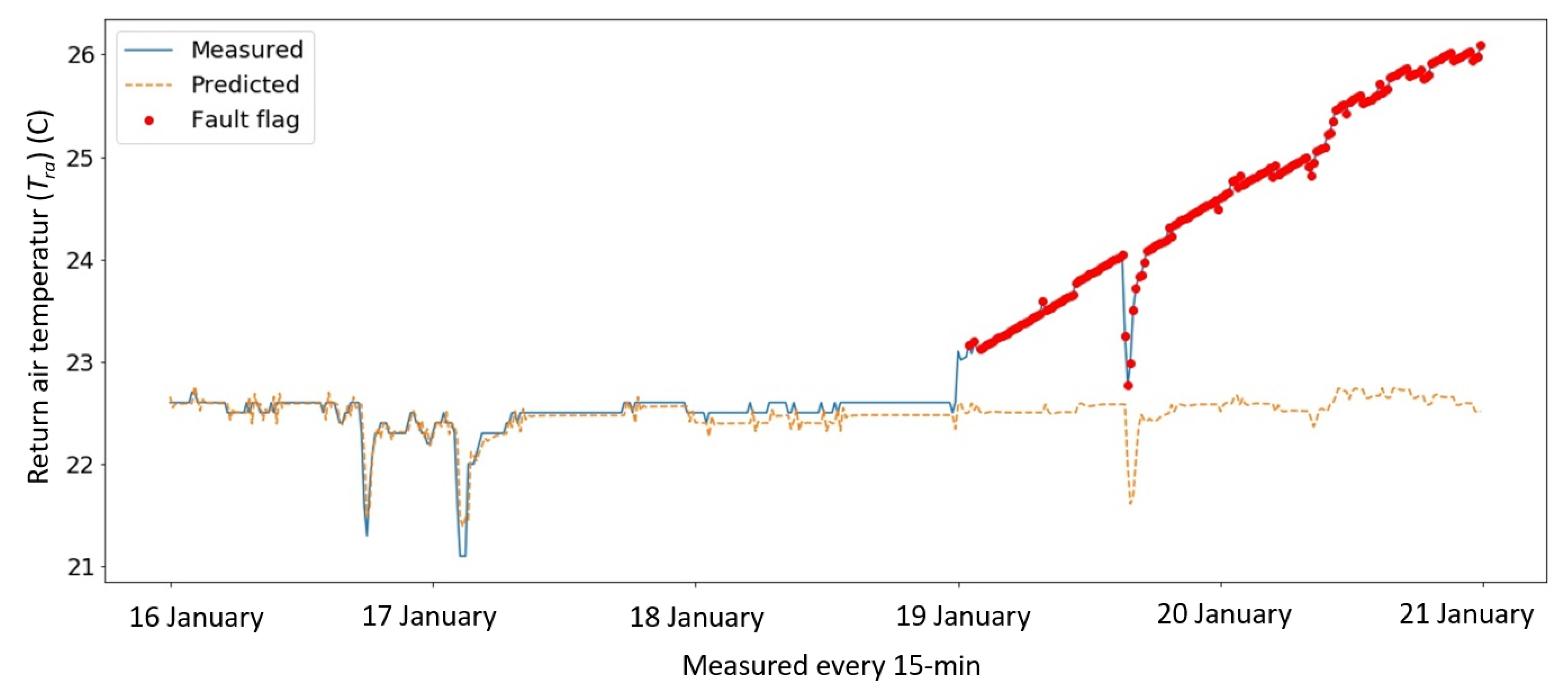
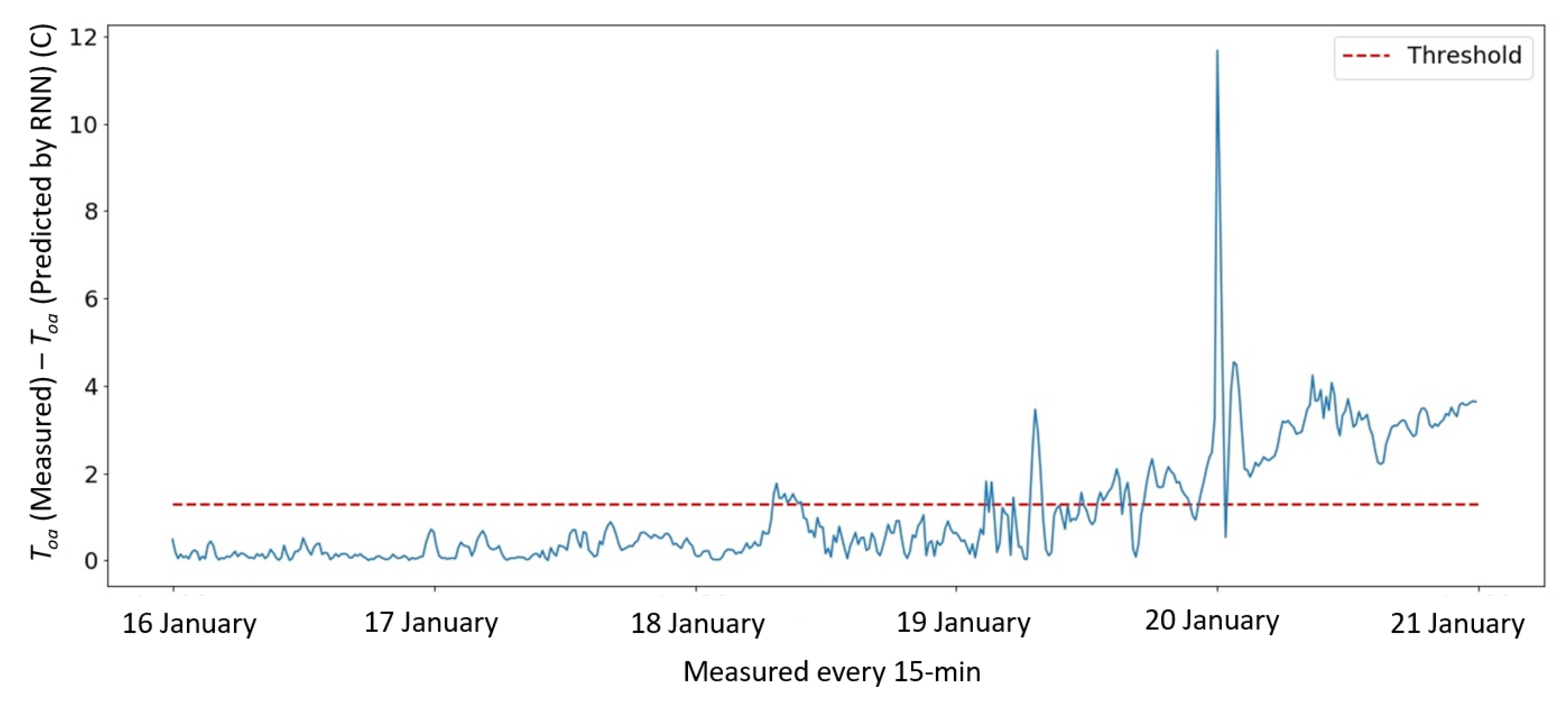
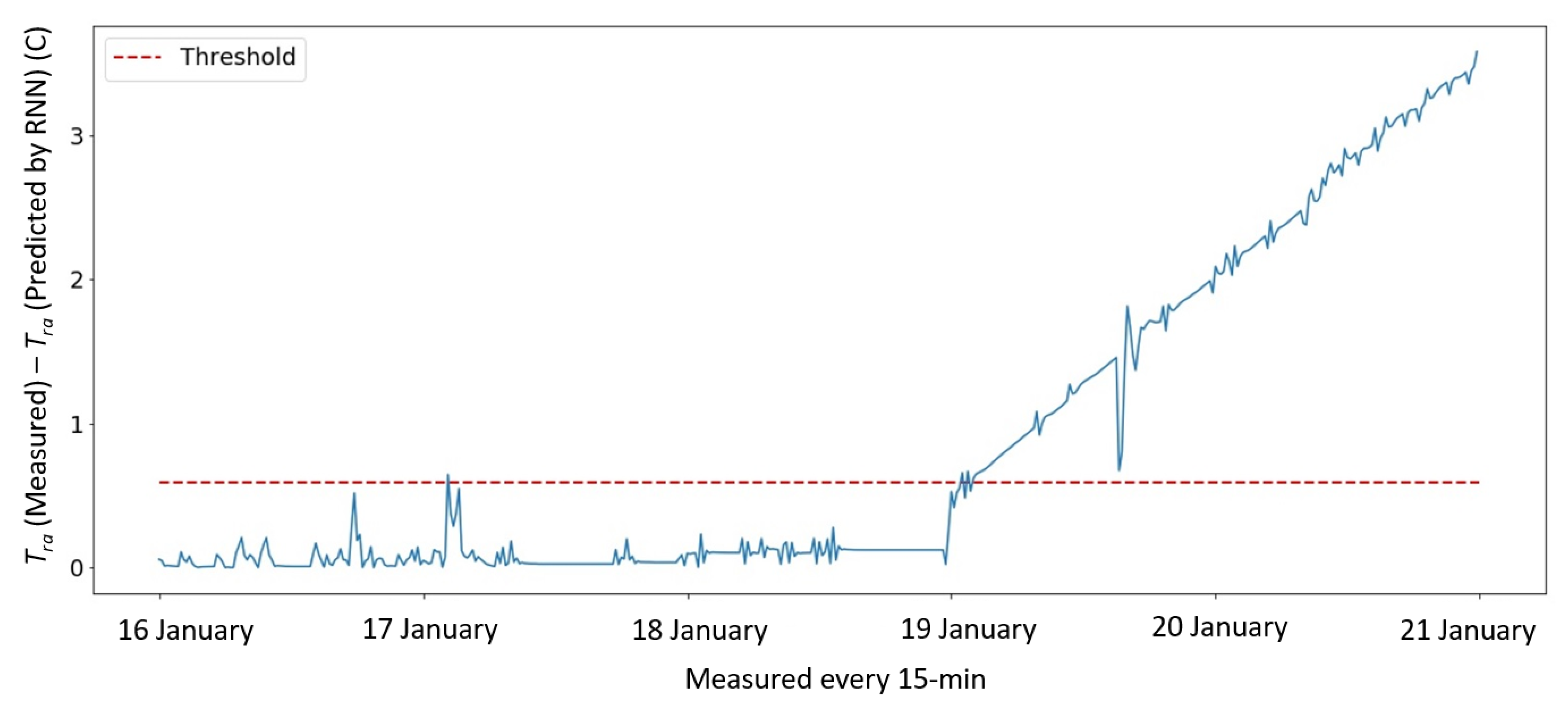
- When the fault symptom of Tma sensor was detected, the next step consisted of the analysis of regressor sensors Toa and Tra. RNN models predicted the values of Toa,p and Tra,p under normal operation conditions. When the residuals exceeded the threshold (i.e., Resoa = abs(Toa − Toa,p) > ε, and Resra = abs(Tra − Tra,p) > ε), the fault symptoms of Toa and Tra were detected (Figure 14 and Figure 15).
- (2)
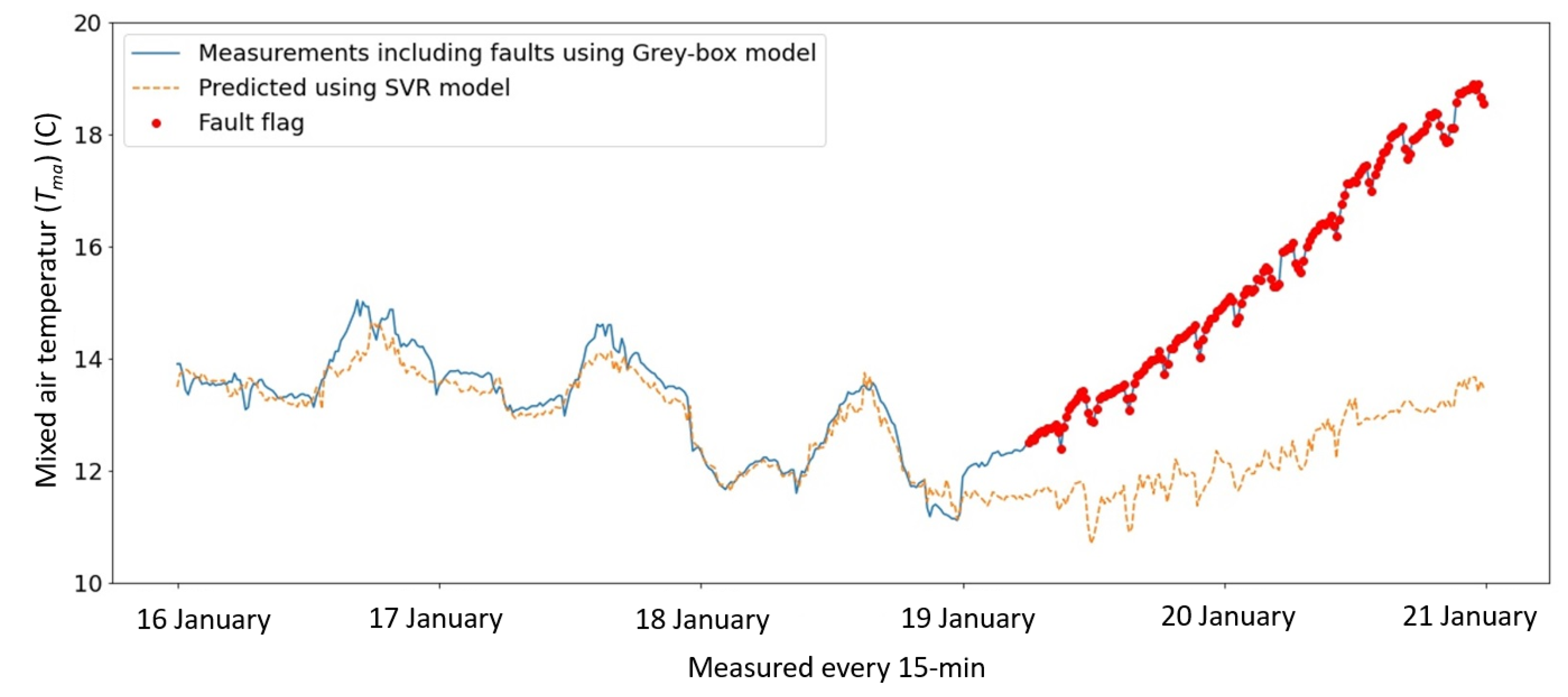
- The expected output of Tma,R under the influence of faulty Toa and Tra sensors was calculated by using a grey-box model (Equation (2), with coefficients a and b of Table 7.
- (3)
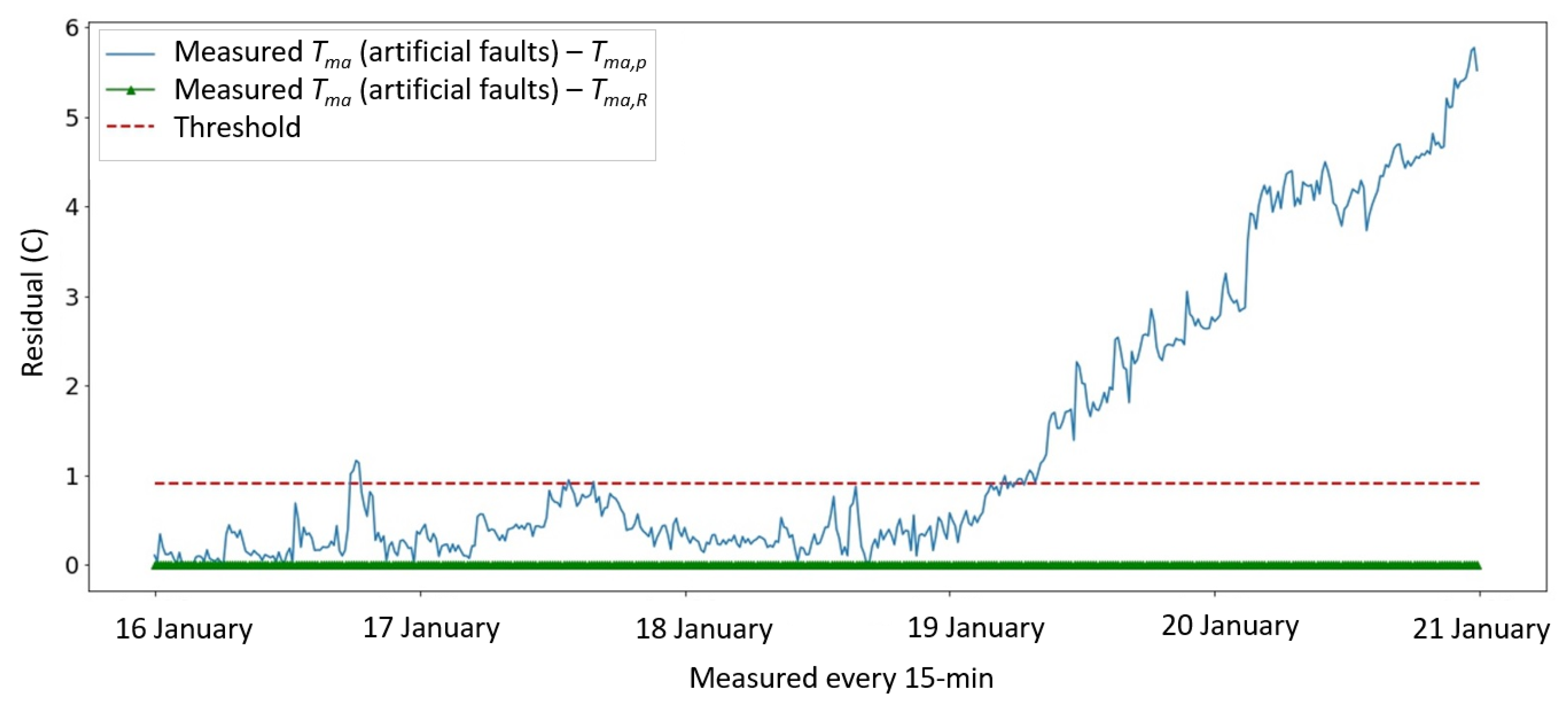
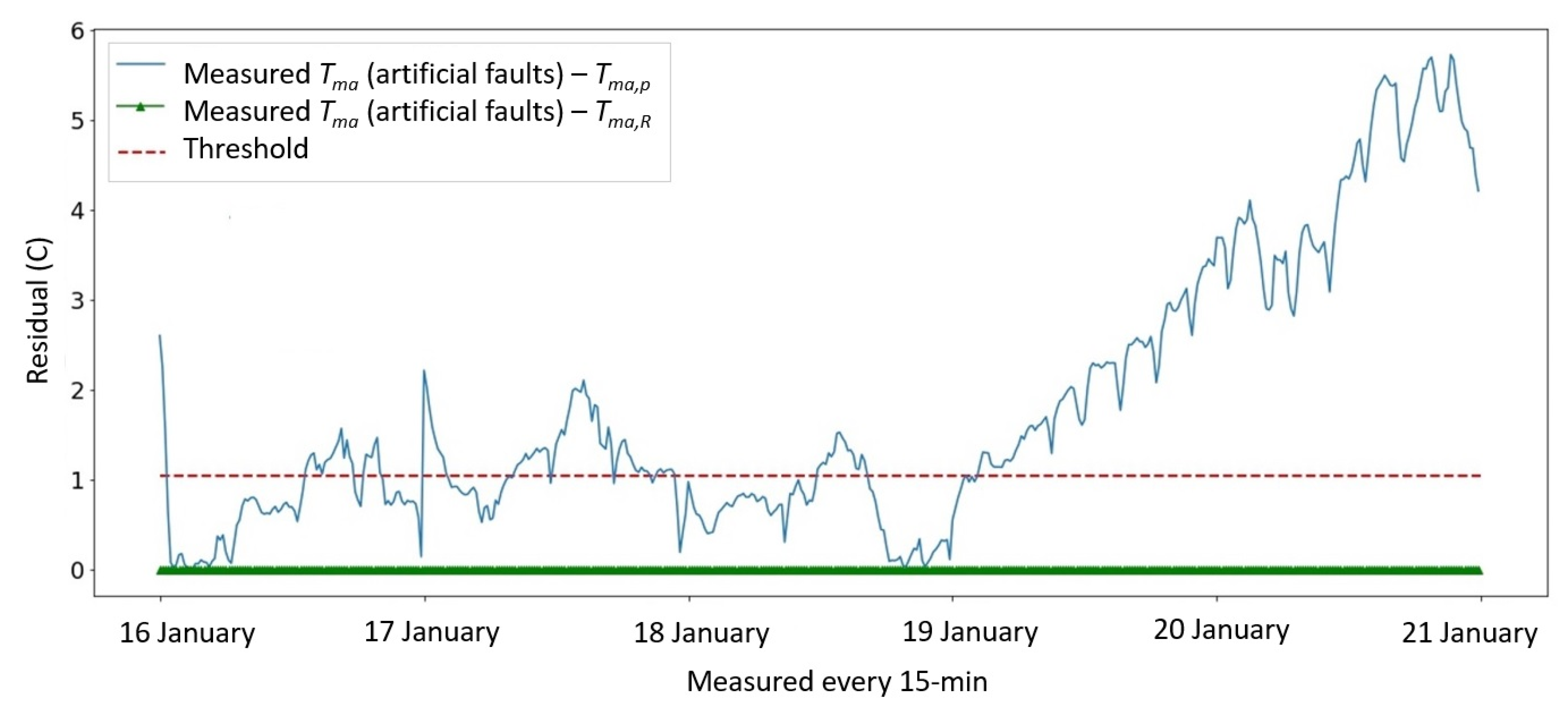
- Since the residual of measured values (i.e., due to artificial faults) of Tma and predicted values Tma,R did not exceeds the threshold ε, the Tma sensor was not faulty (Figure 13), and, thus, a false symptom was detected.
- (4)
- According to rule A.c. (Section 4.3), if Toa and Tra sensors were faulty, but the residual Resma = abs(Tma − Tma,R) < ε, then Tma sensor was not faulty; only Toa and/or Tra sensors were faulty.
5.4. Comparison with Another Method
6. Conclusions, Contributions, and Limitations
6.1. Conclusions
- -
- The combination of machine learning (ML) models using BAS trend data, and rule-based models was successful for the multiple dependent faults detection and diagnosis (MDFDD).
- -
- The information about relationship between sensors was essential for the correct detection and diagnosis of dependent faults. For this purpose, a novel method that guides for faults search by using the information and operation flow between sensors, and between sensors and devices was presented. This approach was not found in any other publication.
- -
- ML models were used for the prediction of two target variables, the mixed air temperature (Tma) and air temperature after heating coil (Tahc). The RNN models were used for the prediction of regressor sensors values (Toa, Tra, TSHW, ValveHC). Rules-based models were used for the diagnosis of faults. These results revealed good performance of these models for the fault detection and diagnosis purposes.
- -
- The proposed method was tested with measurements from BAS trend data under normal operation, and with artificial faults inserted in the measurements data file. The results revealed good performance of the proposed method for the multiple dependent faults of air temperature sensors of an AHU.
- -
- Three days of training data with 288 data points recorded every 15-min was enough for the development of the SVR models for the prediction of target sensors (Tma and Tahc). RMSE over training and testing data sets were 0.31 °C and 0.41 °C, respectively, for the prediction of Tma, and 0.16 °C and 0.21 °C, respectively, for the prediction of Tahc.
- -
- The accuracy of models for the fault prediction of air temperature sensors of Toa and Tra was 93.54 and 99.16%, respectively.
6.2. Contributions
- -
- A novel sequential (compound) machine learning model for the prediction of the target variables (Tma and Tahc) for the scope of MDFDD was proposed.
- -
- A hybrid technique that combines machine learning models and rule-based techniques was proposed.
- -
- A new definition of threshold value was applied, which combined the sensor uncertainty and the ML model uncertainty.
- -
- Machine learning models were developed using the K-fold cross validation.
- -
- Models hyperparameters were optimized using RandomizedSearchCV tool.
6.3. Limitations
- -
- The proposed method should be tested over several heating season data sets and compared with physical faults detected by the maintenance team and recorded in workbooks.
- -
- Ideally, all sensors used in such a study should be periodically re-calibrated to ensure high quality of measurements. However, we understand that such a re-calibration is not always possible, when considering that the operation team had sometimes more urgent and essential calls for fixing HVAC systems.
- -
- Oher approaches should be used for the generation of artificial faults. The use of real experimental data from faults was important.
- -
- The work presented in this paper focused on the detection and diagnosis of multiple dependent faults of air temperature sensors. The work will be expanded by including faults of actuators and components of HVAC systems.
- -
- The machine learning models (SVR and RNN) have been developed using Python with application of the open source scikit-learn, Keras, and TensorFlow packages. A laptop with the following configuration was used: Windows 10, Intel(R) Core (TM) i5-1035G7 CPU @ 1.20GHz, 1498 Mhz, 4 Cores, 8 Logical Processors, and 8 GB RAM. The system was sufficient in development and optimization of the proposed ML models, taking no more than 60 s for SVR and 10 min for RNN models’ development. However, for the development of RNN models with more data and other optimization methods, longer computing time was expected. Hence, a more powerful computer was needed.
7. Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations and Nomenclature
| AHU | Air handling unit |
| ANN | Artificial neural network |
| BAS | Building automation system |
| CNN | Convolutional neural network |
| DANN | Deep artificial neural network |
| FDD | Fault detection and diagnosis |
| FN | False negative |
| FP | False positive |
| HVAC | Heating, ventilation and air conditioning |
| K-NN | K-Nearest Neighbor |
| MAPE | Mean absolute percentage error |
| MBE | Mean bias error |
| Maximum absolute error | |
| ML | Machine learning |
| PCA | Principal component analysis |
| R2 | Coefficient of determination |
| RMSE | Root mean squared error |
| RNN | Recurrent neural network |
| MDFDD | Multiple dependent faults detection and diagnosis |
| SVDD | Support vector data description |
| SVM | Support vector machine |
| SVR | Support vector regression |
| TN | True negative |
| TP | True positive |
| VAV | Variable air volume |
| TSHW | Supply hot water temperature |
| Tahc | Air temperature after heating coil |
| Tahc,R | Corrected sensor output of air temperature after heating coil |
| Tma | Mixed air temperature |
| Tma,R | Corrected sensor output of mixed air temperature |
| Toa | Outdoor air dry-bulb temperature |
| Tra | Return air temperature |
| Tsa | Supply air temperature |
| ValveHC | Heating coil valve position |
| Vma | Mixed air volumetric flow rate |
| Voa | Outdoor air volumetric flow rate |
| Vra | Return air volumetric flow rate |
| Predicted value | |
| Measured value | |
| Average measured value |
References
- Beiter, P.; Elchinger, M.; Tian, T. 2016 Renewable Energy Data Book; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2017. [Google Scholar]
- Katipamula, S.; Brambley, M.R. Review Article: Methods for Fault Detection, Diagnostics, and Prognostics for Building Systems—A Review, Part I. HVAC&R Res. 2005, 11, 3–25. [Google Scholar]
- Yua, Y.; Woradechjumroena, D.; Yub, D. A review of fault detection and diagnosis methodologies on air-handling units. Energy Build. 2014, 82, 550–562. [Google Scholar] [CrossRef]
- Kim, W.; Katipamula, S. A review of fault detection and diagnostics methods for building systems. Sci. Technol. Built Environ. 2018, 24, 3–21. [Google Scholar] [CrossRef]
- Cengel, Y.; Boles, M.A. Thermodynamics, An Engineering Approach, 6th ed.; McGraw Hill: New York, NY, USA, 2001. [Google Scholar]
- Zhao, Z.; Wang, S.; Xiao, F.; Ma, Z. A simplified physical model-based fault detection and diagnosis strategy and its customized tool for centrifugal chillers. HVAC & R Res. 2013, 19, 283–294. [Google Scholar]
- Liang, J.; Du, R. Model-based Fault Detection and Diagnosis of HVAC systems using Support Vector Machine method. Int. J. Refrig. 2007, 30, 1104–1114. [Google Scholar] [CrossRef]
- Pourariana, S.; Wen, J.; Veronica, D.; Pertzborn, A.; Zhouc, X.; Liu, R. A tool for evaluating fault detection and diagnostic methods for fan coil units. Energy Build. 2017, 136, 151–160. [Google Scholar] [CrossRef] [Green Version]
- Mulumba, T.; Afshari, A.; Yana, K.; Shena, W.; Norford, L.K. Robust model-based fault diagnosis for air handling units. Energy Build. 2015, 86, 698–707. [Google Scholar] [CrossRef]
- Bonvini, M.; Sohn, M.D.; Granderson, J.; Wetter, M.; Piette, M.A. Robust on-line fault detection diagnosis for HVAC components based on nonlinear state estimation techniques. Appl. Energy 2014, 124, 156–166. [Google Scholar] [CrossRef]
- Najafi, M. Modeling and Measurement Constraints in Fault Diagnostics for HVAC Systems; Lawrence Berkeley National Laboratory, University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Najafi, M.; Auslander, D.M.; Bartlett, P.L.; Haves, P.; Sohn, M.D. Application of machine learning in the fault diagnostics of air handling units. Appl. Energy 2012, 96, 347–358. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Y.; Chan, C.W.H.; Qin, J.; Wang, J. Online model-based fault detection and diagnosis strategy for VAV air handling. Energy Build. 2012, 55, 252–263. [Google Scholar] [CrossRef]
- Deshmukh, S.; Glicksman, L.; Norford, L. Case study results: Fault detection in air-handling units in buildings. Adv. Build. Energy Res. 2018, 14, 305–321. [Google Scholar] [CrossRef]
- Schein, J.; Bushby, S.T.; Castro, N.S.; House, J.M. A rule-based fault detection method for air handling units. Energy Build. 2006, 38, 1485–1492. [Google Scholar] [CrossRef]
- Schein, J. Results from Field Testing of Embedded Air Handling Unit and Variable Air Volume Box Fault Detection Tools; U.S. Department of Commerce, National Institute of Standards and Technology: Gaithersburg, CA, USA, 2006.
- Katipamula, S.; Brambley, M.R.; Luskay, L. Automated Proactive Techniques for Commissioning Air handling unit. Sol. Energy Eng. Trans. ASME 2003, 125, 282–291. [Google Scholar] [CrossRef]
- House, J.M.; Vaezi-Nejad, H.; Whitcomb, J.M. An expert rule set for fault detection in air handling units. ASHRAE Trans. 2001, 107, 858–871. [Google Scholar]
- House, J.M.; Lee, W.Y.; Dong, R.S. Classification techniques for fault detection and diagnosis of an air handling unit. ASHRAE Trans. Symp. 1999, 105, 1087–1097. [Google Scholar]
- Katipamula, S.; Brambley, M.R.; Bauman, N.N.; Pratt, R.G. Enhancing Building Operations through Automated Diagnostics: Field Test Results. In Proceedings of the Third International Conference for Enhanced Building Operations, Berkeley, CA, USA, 13–15 October 2003. [Google Scholar]
- Yang, H.; Cho, S.; Tae, C.S.; Zaheeruddin, M. Sequential rule based algorithms for temperature sensor fault detection in air handling units. Energy Conversion Manag. 2008, 49, 2291–2306. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Y. A robust fault detection and diagnosis strategy for multiple faults of VAV air handling units. Energy Build. 2016, 127, 442–451. [Google Scholar] [CrossRef]
- Katipamula, S.; Pratt, R.G.; Chassin, D.P.; Taylor, Z.T. Automated Fault Detection and Diagnostics for Outdoor-Air Ventilation Systems and Economizers: Methodology and Results from Field Testing. ASHRAE Trans. 1999, 105, 1–13. [Google Scholar]
- Zhao, Y.; Wen, J.; Xiao, F.; Yang, X.; Wang, S. Diagnostic Bayesian networks for diagnosing air handling units faults—Part I: Faults in dampers, fans, filters and sensors. Appl. Therm. Eng. 2017, 111, 1272–1286. [Google Scholar] [CrossRef]
- Zhao, Y.; Wen, J.; Wang, S. Diagnostic Bayesian networks for diagnosing air handling units faults—Part II: Faults in coils and sensors. Appl. Therm. Eng. 2015, 90, 145–157. [Google Scholar] [CrossRef]
- Dey, D.; Dong, B. A probabilistic approach to diagnose faults of air handling units in buildings. Energy Build. 2016, 130, 177–187. [Google Scholar] [CrossRef]
- Qin, J.; Wang, S. A fault detection and diagnosis strategy of VAV air-conditioning systems for improved energy and control performances. Energy Build. 2005, 37, 1035–1048. [Google Scholar] [CrossRef]
- Annex 34. Technical Synthetic Report Computer Aided Evaluation of HVAC System Performance; International Energy Agency: Birmingham, UK, 2006. [Google Scholar]
- Samuel, A.L. Some Studies in Machine Learning Using the Game of Checkers. IBM J. Res. Dev. 1959, 3, 210–229. [Google Scholar] [CrossRef]
- Python, 3.8.1. Available online: https://www.python.org/ (accessed on 10 January 2022).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Chollet, F. 2015. Available online: https://github.com/fchollet/keras (accessed on 15 October 2021).
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M. Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: http://tensorflow.org/ (accessed on 10 November 2021).
- Yan, K.; Zhong, C.; Ji, Z.; Huang, J. Semi-supervised learning for early detection and diagnosis of various air handling unit faults. Energy Build. 2018, 181, 75–83. [Google Scholar] [CrossRef]
- Han, H.; Gu, B.; Wang, T.; Li, Z.R. Important sensors for chiller fault detection and diagnosis (FDD) from the perspective of feature selection and machine learning. Int. J. Refrig. 2011, 34, 586–599. [Google Scholar] [CrossRef]
- Han, H.; Gu, B.; Hong, Y.; Kang, J. Automated FDD of multiple-simultaneous faults (MSF) and the application to building chillers. Energy Build. 2011, 43, 2524–2532. [Google Scholar] [CrossRef]
- Han, H.; Gua, B.; Kang, J.; Li, Z.R. Study on a hybrid SVM model for chiller FDD applications. Appl. Therm. Eng. 2011, 31, 582–592. [Google Scholar] [CrossRef]
- Montazeri, A.; Kargar, S.M. Fault detection and diagnosis in air handling using data-driven methods. J. Build. Eng. 2020, 31, 101388. [Google Scholar] [CrossRef]
- Ebrahimifakhar, A.; Kabirikopaei, A.; Yuill, D. Data-driven fault detection and diagnosis for packaged rooftop units using statistical machine learning classification methods. Energy Build. 2020, 225, 110318. [Google Scholar] [CrossRef]
- Yan, K.; Chong, A.; Mo, Y. Generative adversarial network for fault detection diagnosis of chillers. Build. Environ. 2020, 172, 106698. [Google Scholar] [CrossRef]
- Le Cam, M.; Zmeureanu, R.; Daoud, A. Cascade-based short-term forecasting method of the electric demand of HVAC system. Energy 2017, 119, 1098–1107. [Google Scholar] [CrossRef]
- Zhijian, H.; Lian, Z. An application of support vector machines in cooling load prediction. In Proceedings of the International Workshop on Intelligent Systems and Applications, Wuhan, China, 23–24 May 2009; pp. 1–4. [Google Scholar]
- Ding, L.; Lv, J.; Li, X.; Li, L. Support Vector Regression and Ant Colony Optimization for HVAC Cooling Load Prediction. In Proceedings of the International Symposium on Computer, Communication, Control and Automation, Tainan, Taiwan, 5–7 May 2010; pp. 537–541. [Google Scholar]
- Xue-Cheng, X.; Poo, A.N.; Chou, S.K. Support vector regression model predictive control on a HVAC plant. Control. Eng. Pract. 2007, 15, 897–908. [Google Scholar]
- Xuemei, L.; Lixing, D.; Yan, L.; Gang, X.; Jibin, L. Hybrid Genetic Algorithm and Support Vector Regression in Cooling Load Prediction. In Proceedings of the Third International Conference on Knowledge Discovery and Data Mining, Phuket, Thailand, 9–10 January 2010. [Google Scholar]
- Braspenning, P.J.; Thuijsman, F.; Weijters, A.J.M.M. Artificial Neural Networks; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- LeCun, Y.; Bottou, L.; Orr, G.B.; Muller, K.R. Efficient BackProb; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Chae, Y.T.; Horesh, R.; Hwang, Y.; Lee, Y.M. Artificial neural network model for forecasting sub-hourly electricity usage in commercial buildings. Energy Build. 2016, 111, 184–194. [Google Scholar] [CrossRef]
- Magoules, F.; Zhao, H.Z.; Elizondo, D. Development of an RDP neural network for building energy consumption fault detection and diagnosis. Energy Build. 2013, 62, 133–138. [Google Scholar] [CrossRef]
- Elnour, M.; Meskin, N.; Al-Naemi, M. Sensor data validation and fault diagnosis using Auto-Associative Neural Network for HVAC systems. J. Build. Eng. 2020, 27, 100935. [Google Scholar] [CrossRef]
- Lee, K.P.; Wu, B.H.; Peng, S.L. Deep-learning-based fault detection and diagnosis of air-handling units. Build. Environ. 2019, 157, 24–33. [Google Scholar] [CrossRef]
- Heo, S.; Lee, J.H. Fault detection and classification using artificial neural networks. IFAC PapersOnLine 2018, 51, 470–475. [Google Scholar] [CrossRef]
- Hou, Z.; Lian, Z.; Yao, Y.; Yuan, X. Data mining based sensor fault diagnosis and validation for building air conditioning system. Energy Convers. Manag. 2006, 47, 2479–2490. [Google Scholar] [CrossRef]
- Guo, Y.; Tanb, Z.; Chen, H.; Lic, G.; Wanga, J.; Huanga, R.; Liua, J.; Ahmada, T. Deep learning-based fault diagnosis of variable refrigerant flow air-conditioning system for building energy saving. Appl. Energy 2018, 225, 732–745. [Google Scholar] [CrossRef]
- Hecht-Nielsen, R. Kolmogorov's mapping neural network existence theorem. In Proceedings of the IEEE First International Conference on Neural Networks, San Diego, CA, USA, 23–26 July 1987; pp. 11–13. [Google Scholar]
- Heaton, J. Introduction to Neural Networks with Java; Heaton Research: St. Louis, MO, USA, 2008. [Google Scholar]
- Blum, A. Neural Networks in C++; Wiley: New York, NY, USA, 1992. [Google Scholar]
- Berry, M.J.; Linoff, G.S. Data Mining Techniques; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Shahnazari, H.; Mhaskar, P.; House, J.M.; Salsbury, T.I. Modeling and fault diagnosis design for HVAC systems using recurrent neural networks. Comput. Chem. Eng. 2019, 126, 189–203. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Jolliffe, I.T. Principal Component Analysis; Springer: New York, NY, USA, 1986. [Google Scholar]
- Jackson, J.E.; Mdholkar, G.S. Control Procedures for Residuals Associated With Principal Component Analysis. Technometrics 1979, 21, 341–349. [Google Scholar] [CrossRef]
- Cotrufo, N.; Zmeureanu, R. PCA-based method of soft fault detection and identification for the ongoing commissioning of chillers. Energy Build. 2016, 130, 443–452. [Google Scholar] [CrossRef]
- Bezyan, B.; Zmeureanu, R. Principal Component Analysis for the ongoing commissioning of northern houses. In Proceedings of the eSim 2018, the 10th Conference of IBPSA, Montreal, QC, Canada, 9–10 May 2018. [Google Scholar]
- Li, S.; Wen, J. A model-based fault detection and diagnostic methodology based on PCA method and wavelet transform. Energy Build. 2014, 68, 63–71. [Google Scholar] [CrossRef]
- Lia, G.; Hu, Y.; Chen, H.; Shena, L.; Li, H.; Hu, M.; Liua, J.; Sun, K. An improved fault detection method for incipient centrifugal chiller faults using the PCA-R-SVDD algorithm. Energy Build. 2016, 116, 104–113. [Google Scholar] [CrossRef]
- Tax, D.M.J.; Duin, R.P.W. Support vector domain description. Pattern Recognit. Lett. 1999, 20, 1191–1199. [Google Scholar] [CrossRef]
- Tax, D.M.J.; Duin, R.P.W. Support Vector Data Description. Mach. Learn. 2004, 54, 45–66. [Google Scholar] [CrossRef] [Green Version]
- Lewis, D.D. Naive (Bayes) at forty: The independence assumption in information retrieval. Lect. Notes Comput. Sci. 1998, 1398, 4–15. [Google Scholar]
- Zhang, H. The Optimality of Naive Bayes; American Association for Artificial Intelligence: Menlo Park, CA, USA, 2004. [Google Scholar]
- Cai, B.; Liu, Y.; Fan, Q.; Zhang, Y.; Liu, Z.; Yu, S.; Ji, R. Multi-source information fusion based fault diagnosis of ground-source heat pump using Bayesian network. Appl. Energy 2014, 114, 1–9. [Google Scholar] [CrossRef]
- Dey, M.; Rana, S.P.; Dudley, S. A case study based approach for remote fault detection using multi-level machine learning in a smart building. Smart Cities 2020, 3, 401–419. [Google Scholar] [CrossRef]
- Du, Z.; Fan, B.; Jin, X.; Chi, J. Fault detection and diagnosis for buildings and HVAC systems using combined neural networks and subtractive clustering analysis. Build. Environ. 2014, 73, 1–11. [Google Scholar] [CrossRef]
- Fan, B.; Du, Z.; Jin, X.; Yang, X.; Guo, Y. A hybrid FDD strategy for local system of AHU based on artificial neural network and wavelet analysis. Build. Environ. 2010, 45, 2698–2708. [Google Scholar] [CrossRef]
- Koçyigit, N. Fault and sensor error diagnostic strategies for a vapor compression refrigeration system by using fuzzy inference systems and artificial neural network. Int. J. Refrig. 2015, 50, 69–79. [Google Scholar] [CrossRef]
- Yan, K.; Huang, J.; Shen, W.; Ji, Z. Unsupervised learning for fault detection and diagnosis of air handling units. Energy Build. 2020, 210, 109689. [Google Scholar] [CrossRef]
- Zhao, Y.; Xiao, F.; Wen, J.; Lu, Y.; Wang, S. A robust pattern recognition-based fault detection and diagnosis (FDD) method for chillers. HVAC&R Res. 2014, 20, 798–809. [Google Scholar]
- Li, D.; Hu, G.; Spanos, C.J. A data-driven strategy for detection and diagnosis of building chiller faults using linear discriminant analysis. Energy Build. 2016, 128, 519–529. [Google Scholar] [CrossRef]
- Zhao, X. Lab test of three fault detection and diagnostic methods’ capability of diagnosing multiple simultaneous faults in chillers. Energy Build. 2015, 94, 43–51. [Google Scholar] [CrossRef]
- Miyata, S.; Akashi, Y.; Lim, J.; Kuwahara, Y.; Tanaka, K. Model-Based Fault Detection and Diagnosis for HVAC Systems Using Convolutional Neural Network; International Building Performance Simulation Association: Rome, Italy, 2019. [Google Scholar]
- Miyata, S.; Lim, J.; Akashi, Y.; Kuwahara, Y.; Tanaka, K. Fault detection and diagnosis for heat source system using convolutional neural network with imaged faulty behavior data. Sci. Technol. Built Environ. 2019, 26, 52–60. [Google Scholar] [CrossRef] [Green Version]
- Cotrufo, N.; Zmeureanu, R. Virtual outdoor air flow meter for an existing HVAC system in heating mode. Autom. Constr. 2018, 92, 166–172. [Google Scholar] [CrossRef]
- Zibin, N.; Zmeureanu, R.; Love, J. Bottom-up simulation calibration of zone and system level models using building automation system (BAS) trend data. In Proceedings of the eSim 2014 Conference, Ottawa, QC, Canada, 29 June 2014. [Google Scholar]
- Zhao, Y.; Li, T.; Zhang, X.; Zhang, C. Artificial intelligence-based fault detection and diagnosis methods for building energy systems: Advantages, challenges and the future. Renew. Sustain. Energy Rev. 2019, 109, 85–101. [Google Scholar] [CrossRef]
- Drucker, H.; Burges, C.J.C.; Kaufman, L.; Smola, A.; Vapnik, V. Support Vector Regression Machines; MIT Press: Cambridge, MA, USA, 1997; pp. 155–161. [Google Scholar]
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Burges, C.J.C. A Tutorial on Support Vector Machines for Pattern Recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]
- Ben-Hur, A.; Weston, J. A users guide to support vector machines. In Data Mining Techniques for the Life Sciences; Springer: Berlin/Heidelberg, Germany, 2010; pp. 223–239. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Cherkassky, V.; Ma, Y. Practical selection of SVM parameters and noise estimation for SVM regression. Neural Netw. 2004, 17, 113–126. [Google Scholar] [CrossRef] [Green Version]
- Barnston, A.G. Correspondence among the correlation, RMSE, and Heidke forecast verification measures; refinement of the Heidke score. Notes Corresp. Clim. Anal. Cent. 1992, 7, 699–709. [Google Scholar] [CrossRef] [Green Version]
- Kenney, J.F. Mathematics of Statistics, Part 1, 3rd ed.; Van Nostrand: New York, NY, USA, 1962. [Google Scholar]
- Olson, L.D.; Delen, D. Advanced Data Mining Techniques; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Van Rijsbergen, C.J. Information Retrieval; Butterworth-Heinemann: Oxford, UK, 1979. [Google Scholar]
- Sasaki, Y. The Truth of the F-Measure; School of Computer Science, University of Manchester: Manchester, UK, 2007. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Strengths | Weaknesses |
|---|---|---|
| Process history-based |
|
|
| Qualitative model-based |
|
|
| Quantitative model-based |
|
|
| No. | Variable | Description | Fixed (Bias) (Bx) | Random Error (Rx) | Total Uncertainty | Unit |
|---|---|---|---|---|---|---|
| 1 | Toa | Outdoor air dry-bulb temperature | 0.45 | 0.19 | 0.49 | °C |
| 2 | Tra | Return air temperature | °C | |||
| 3 | Tma | Mixed air temperature | °C | |||
| 4 | Tahc | Air temperature after heating coil | °C | |||
| 5 | Tsa | Supply air temperature | °C | |||
| 6 | TSHW | Supply hot water temperature | 0.31 | 2.20 | 2.22 | °C |
| 7 | Vma | Mixed air volumetric flow rate | 222.0 | 506.11 | 552.65 | L/s |
| 8 | Vra | Return air volumetric flow rate | 222.0 | 229.84 | 319.55 | L/s |
| 9 | Voa | Outdoor air volumetric flow rate | 222.0 | 355.98 | 419.53 | L/s |
| 10 | ValveHC | Heating coil valve position | - | - | 2 | % |
| 11 | ΔTs,fan | Air temperature rise over supply fan | - | - | - | °C |
| True (Known) Faults | |||
|---|---|---|---|
| Negative (0) | Positive (1) | ||
| Predicted faults | Negative (0) | TN | FP |
| Positive (1) | FN | TP | |
| Target | Input Variables | Prediction Performance of Model Over Training Data Set (288 Data Points) | Average of 6-Fold Cross-Validation of Prediction Performance Over Testing Data Set of One-Day (96 Data Points) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 (%) | RMSE (°C) | MAPE (%) | MBE (°C) | (°C) | RMSE (°C) | MAPE (%) | MBE (°C) | (°C) | ||
| Tma | Toa, Tra, Vma, Vra, Voa | 98.33 | 0.31 | 0.43 | 0.04 | 1.51 | 0.41 | 2.63 | 0.34 | 0.97 |
| Target | Input Variables | Prediction Performance of Model Over Training Data Set (288 Data Points) | Average of 6-Fold Cross-Validation of Prediction Performance Over Testing Data Set of One-Day (96 Data Points) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 (%) | RMSE (°C) | MAPE (%) | MBE (°C) | MEmax (°C) | RMSE (°C) | MAPE (%) | MBE (°C) | MEmax (°C) | ||
| Tahc | Tma, Vma, TSHW, ValveHC | 98.83 | 0.16 | 0.14 | 0.02 | 0.57 | 0.21 | 1.08 | 0.17 | 0.60 |
| Regressor Sensor at Time ‘t’ | Average of 6-Fold Cross-Validation of Prediction Performance Over Testing Data Set of One Day (96 Data Points) | Threshold for Fault Detection | ||||
|---|---|---|---|---|---|---|
| Variable | Unit | RMSE | MAPE (%) | MBE | ɛ = Sensor Uncertainty + RMSE | |
| Toa | °C | 0.89 | 100.03 | 1.98 | 3.42 | 1.38 |
| Tra | °C | 0.08 | 0.91 | 0.20 | 0.38 | 0.57 |
| TSHW | °C | 0.70 | 4.75 | 1.99 | 2.74 | 1.00 |
| ValveHC | % | 1.41 | 10.72 | 4.61 | 3.79 | 3.41 |
| No. | Model | Training Data Set (288 Data Points (3-Days)) | Test Data Set (96 Data Points (1-Day)) | |||||
|---|---|---|---|---|---|---|---|---|
| Parameter | Value | Unit | R2 (%) | RMSE (°C) | R2 (%) | RMSE (°C) | ||
| 1 | Equation (2) | a | 0.204 | - | 92.24 | 0.53 | 95.98 | 0.55 |
| b | 0.796 | - | ||||||
| Actual Faults | |||
|---|---|---|---|
| Normal (0) | Faulty (1) | ||
| Predicted faults | Normal (0) | 311 | 22 |
| Faulty (1) | 9 | 138 | |
| Actual Faults | |||
|---|---|---|---|
| Normal (0) | Faulty (1) | ||
| Predicted faults | Normal (0) | 289 | 2 |
| Faulty (1) | 2 | 187 | |
| Target | Prediction Performance of Model over Testing Data Set (6-Days, 576 Data Points) | ||
|---|---|---|---|
| Accuracy (%) | Precision (%) | Sensitivity (%) | |
| Toa | 93.54 | 86.25 | 93.88 |
| Tra | 99.16 | 98.95 | 98.95 |
| Regressor Sensor at Time ‘t’ | Average of 6-Fold Cross-Validation of Prediction Performance over Testing Data Set of One Day (96 Data Points) | Threshold for Fault Detection | ||||
|---|---|---|---|---|---|---|
| Variable | Unit | RMSE | MAPE (%) | MBE | ɛ = Sensor Uncertainty + RMSE | |
| Toa | °C | 0.89 | 100.03 | 1.98 | 3.42 | 1.38 |
| Tra | 0.08 | 0.91 | 0.20 | 0.38 | 0.57 | |
| Tma | 0.55 | 14.04 | 2.82 | 1.71 | 1.04 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bezyan, B.; Zmeureanu, R. Detection and Diagnosis of Dependent Faults That Trigger False Symptoms of Heating and Mechanical Ventilation Systems Using Combined Machine Learning and Rule-Based Techniques. Energies 2022, 15, 1691. https://doi.org/10.3390/en15051691
Bezyan B, Zmeureanu R. Detection and Diagnosis of Dependent Faults That Trigger False Symptoms of Heating and Mechanical Ventilation Systems Using Combined Machine Learning and Rule-Based Techniques. Energies. 2022; 15(5):1691. https://doi.org/10.3390/en15051691
Chicago/Turabian StyleBezyan, Behrad, and Radu Zmeureanu. 2022. "Detection and Diagnosis of Dependent Faults That Trigger False Symptoms of Heating and Mechanical Ventilation Systems Using Combined Machine Learning and Rule-Based Techniques" Energies 15, no. 5: 1691. https://doi.org/10.3390/en15051691
APA StyleBezyan, B., & Zmeureanu, R. (2022). Detection and Diagnosis of Dependent Faults That Trigger False Symptoms of Heating and Mechanical Ventilation Systems Using Combined Machine Learning and Rule-Based Techniques. Energies, 15(5), 1691. https://doi.org/10.3390/en15051691