
The Vision of Self-Management in Cognitive Organic Power Distribution Systems

 , ,
, , 
Abstract
:1. Introduction
- Conventional regulatory schemes incentivise grid reinforcement instead of using information and communication technology (ICT);
- Full transparency in low and medium voltage grids is non-existent at present. Over the next years, near to full transparency is planned on the medium voltage level, on the low voltage level, this will be even farther in the future;
- The smart meter roll-out is delayed due to information technology (IT) security requests and a limitation to many customers in the first roll-out phases;
- A resilient and continuously available communication infrastructure to connect all sensors and actors has yet to be built;
- Present “smart energy” products request significant effort to configure, parameterise, connect devices, etc.;
- It is not yet entirely clear if from a full system perspective this shift is beneficial regarding costs, reliability, resiliency, etc.
2. State of the Art
2.1. Home Energy Management Systems and Distribution Management Systems
2.2. Methodical Foundations from the Fields of Autonomic and Organic Computing
2.2.1. Self-Configuration
2.2.2. Self-Organisation
2.2.3. Self-Optimisation
2.2.4. Self-Healing
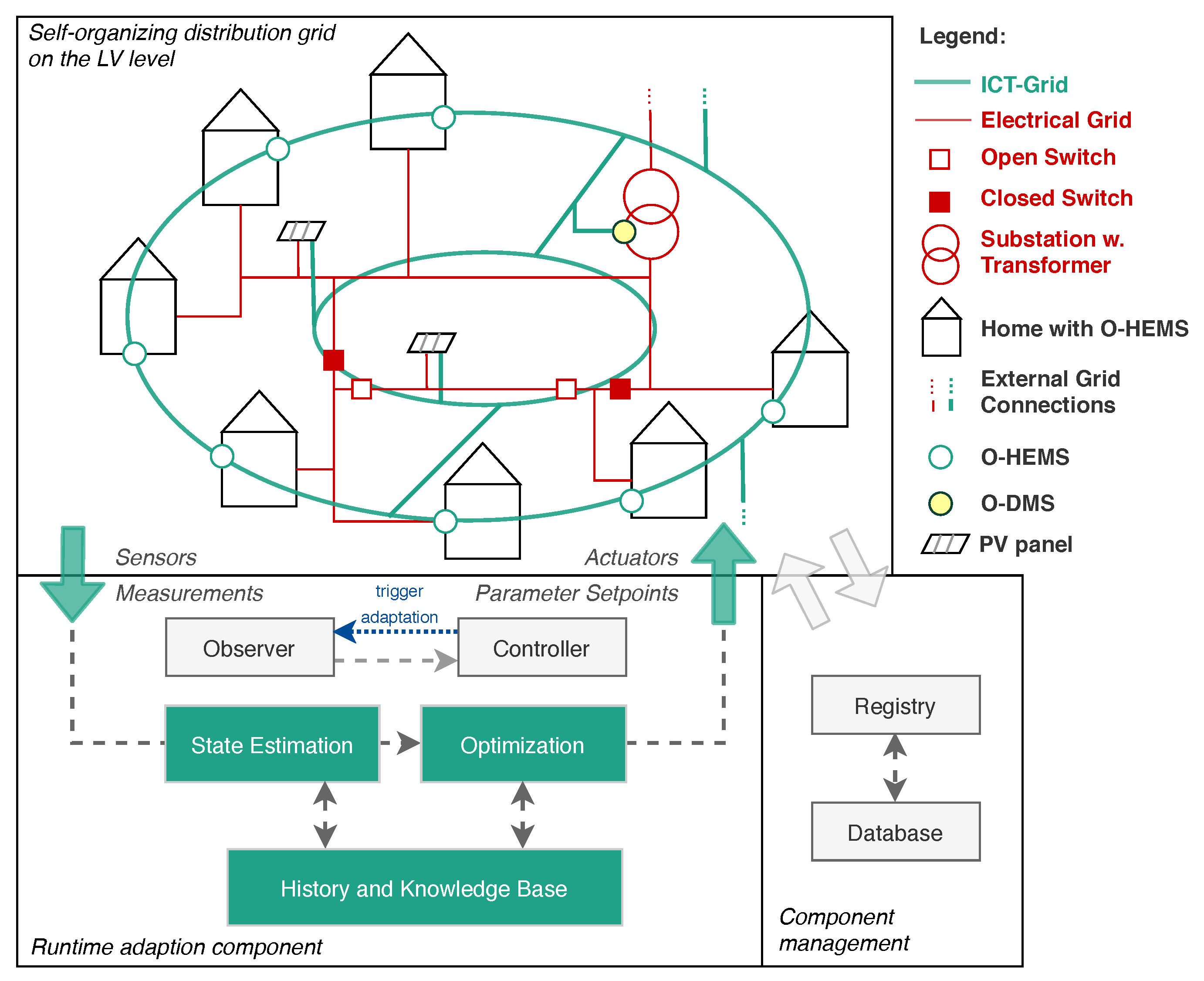
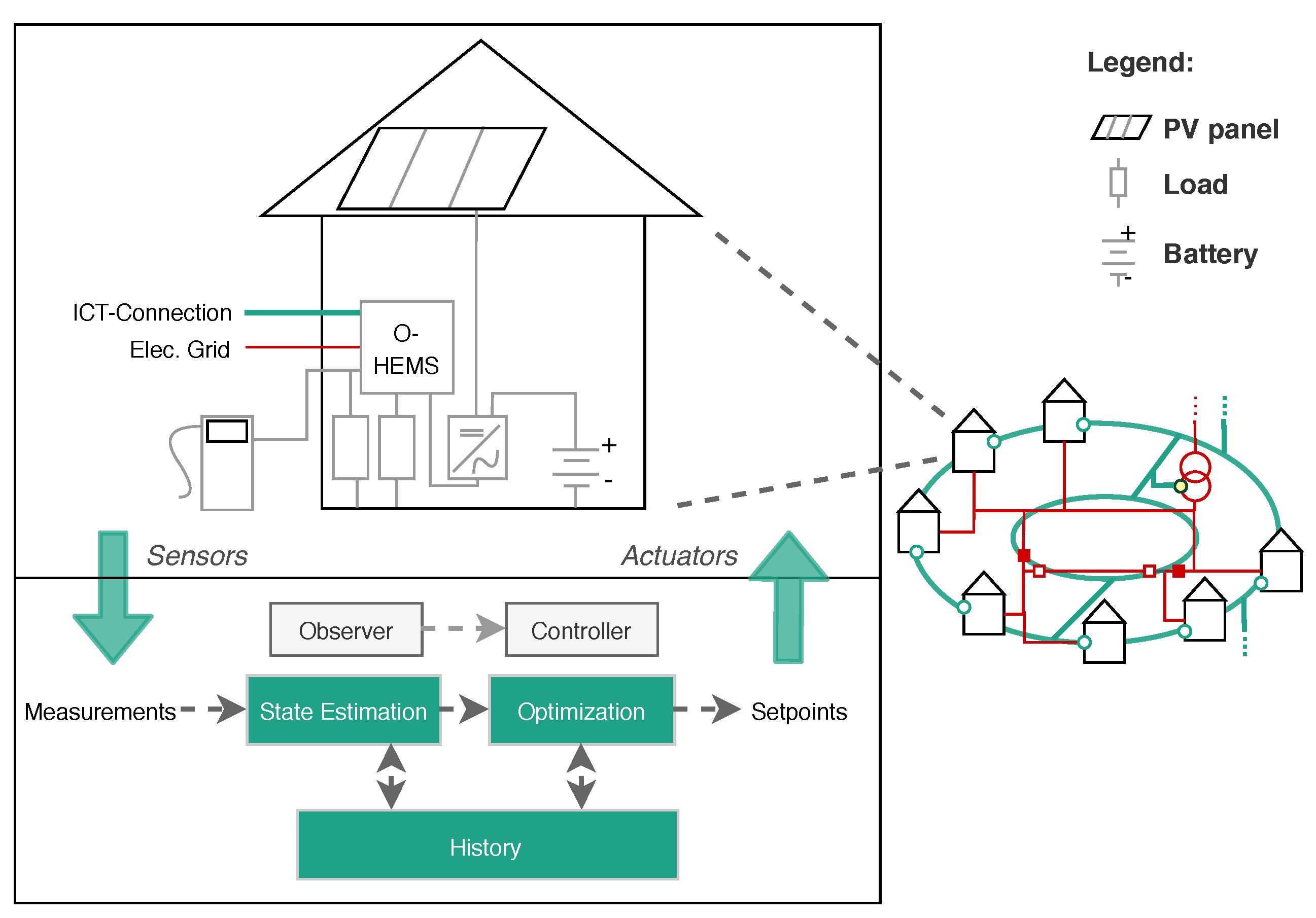
3. A Concept for Organic Distribution Management Systems
3.1. Key Research Question
3.2. System Model
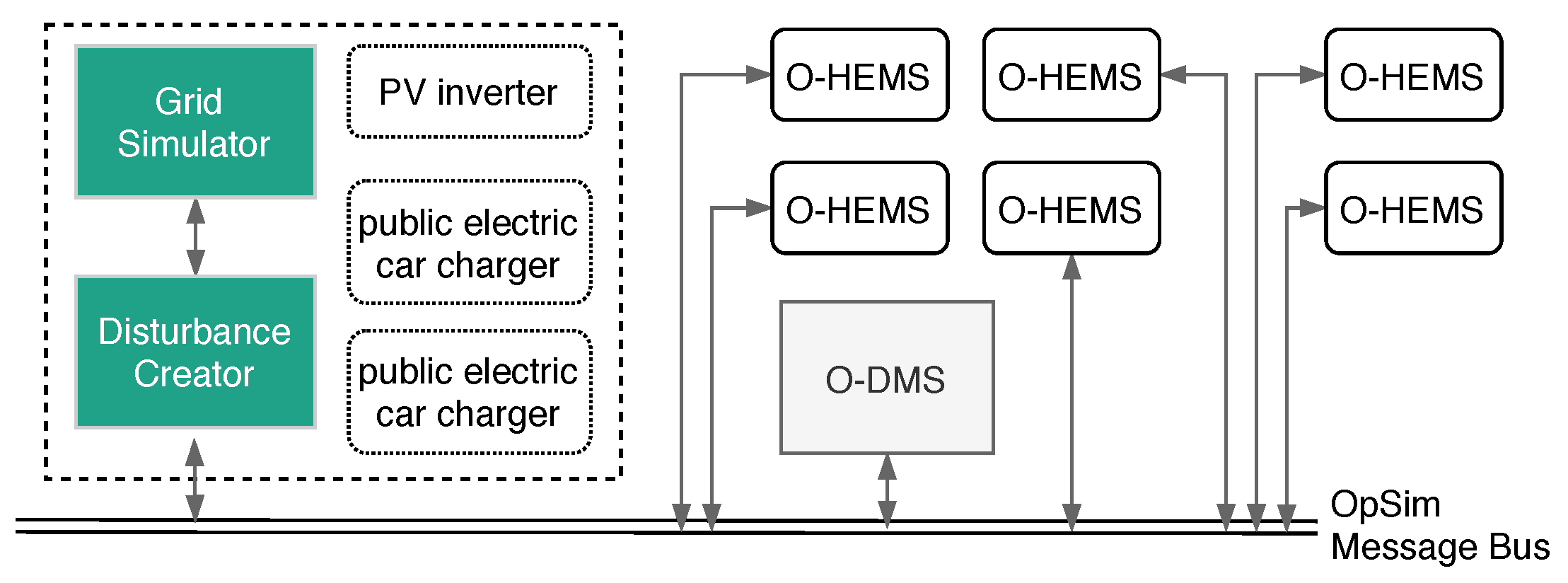
3.2.1. Simulation Framework
3.2.2. Observable and Controllable Parameters
3.3. Evaluation
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Autonomic Computing |
| CM | Control Mechanism |
| DG | Distributed Generators |
| DMS | Distribution Management System |
| EPS | Electric Power System |
| HEMS | Home Energy Management Systems |
| ICT | Information and Communication Technology |
| IT | Information Technology |
| MARL | Multi-agent Reinforcement Learning |
| MAS | Multi-agent System |
| MG | Microgrid |
| ML | Machine Learning |
| ODiS | Organic Distribution System |
| O-DMS | Oorganic Distribution Management System |
| O-HEMS | Organic Home Energy Management System |
| OC | Organic Computing |
| PV | Photovoltaic |
| RL | Reinforcement Learning |
| SASO | Self-adaptive and Self-organising |
| XCS | Extended Classifier System |
References
- Müller-Schloer, C.; Tomforde, S. Organic Computing—Technical Systems for Survival in the Real World, Autonomic Systems; Birkhäuser Verlag: Basel, Switzerland, 2017. [Google Scholar]
- Tomforde, S.; Sick, B.; Müller-Schloer, C. Organic Computing in the Spotlight. arXiv 2017, arXiv:1701.08125. [Google Scholar]
- Tomforde, S.; Hähner, J.; von Mammen, S.; Gruhl, C.; Sick, B.; Geihs, K. “Know Thyself”-Computational Self-Reflection in Intelligent Technical Systems. In Proceedings of the 2014 IEEE Eighth International Conference on Self-Adaptive and Self-Organizing Systems Workshops, London, UK, 8–12 September 2014; pp. 150–159. [Google Scholar]
- Hähner, J.; von Mammen, S.; Timpf, S.; Tomforde, S.; Sick, B.; Geihs, K.; Goeble, T.; Hornung, G.; Stumme, G. “Know thyselves”-Computational Self-Reflection in Collective Technical Systems. In Proceedings of the ARCS 2016; 29th International Conference on Architecture of Computing Systems, Nuremberg, Germany, 4–7 April 2016; pp. 1–8. [Google Scholar]
- Refaat, S.S.; Mohamed, A.; Kakosimos, P. Self-Healing control strategy; Challenges and opportunities for distribution systems in smart grid. In Proceedings of the 2018 IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2018), Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Althaher, S.; Mancarella, P.; Mutale, J. Automated Demand Response From Home Energy Management System Under Dynamic Pricing and Power and Comfort Constraints. IEEE Trans. Smart Grid 2015, 6, 1874–1883. [Google Scholar] [CrossRef]
- Ahmad, A.; Khan, A.; Javaid, N.; Hussain, H.M.; Abdul, W.; Almogren, A.; Alamri, A.; Niaz, I.A. An Optimized Home Energy Management System with Integrated Renewable Energy and Storage Resources. Energies 2017, 10, 549. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Li, S.; Sun, M.; O’Neill, Z. An Optimal and Learning-Based Demand Response and Home Energy Management System. IEEE Trans. Smart Grid 2016, 7, 1790–1801. [Google Scholar] [CrossRef]
- Zandi, H.; Starke, M.; Kuruganti, T. An Implementation for Transforming a Home Energy Management System to a Multi-agent System. In Proceedings of the 7th International Building Physics Conference (IABP 2018), Syracuse, NY, USA, 23–26 September 2018. [Google Scholar]
- Vázquez-Canteli, J.R.; Nagy, Z. Reinforcement learning for demand response: A review of algorithms and modeling techniques. Appl. Energy 2019, 235, 1072–1089. [Google Scholar] [CrossRef]
- Dimeas, A.; Drenkard, S.; Hatziargyriou, N.; Karnouskos, S.; Kok, K.; Ringelstein, J.; Weidlich, A. Smart Houses in the Smart Grid: Developing an interactive network. IEEE Electrif. Mag. 2014, 2, 81–93. [Google Scholar] [CrossRef]
- McGranaghan, M.; Dugan, R.; Abbey, C. Active Distribution Management Workshop. 2009. Available online: https://www.smartgrid.gov/files/documents/Active_Distribution_Management_Workshop_200909.pdf (accessed on 19 February 2020).
- Abur, A.; Exposito, A.G. Power System State Estimation: Theory and Implementation; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Momoh, J. Smart Grid: Fundamentals of Design and Analysis; IEE Power Engineering Series; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- IEEE Standard 1547-2003; IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE Standards Association: Piscataway, NJ, USA, 2003; pp. 1–28.
- Yeager, K.; Gehl, S.; Barker, B. The Role of Smart Power Technologies in Global Electrification. Energy Environ. 2005, 16, 845–870. [Google Scholar] [CrossRef]
- Marnay, C.; Abbey, C.; Joos, G.; Ash, K.; Bando, S.; Braun, M.; Chatzivasileiadis, S.; Driesen, J.; Hatziargyriou, N.; Iravani, R.; et al. Microgrids 1, Engineering, Economics And Experience; Technical Report, CIGRE WG C6.22 Microgrids Evolution Roadmap; Conseil International des Grands Réseaux Électriques (CIGRÉ): Paris, France, 2015. [Google Scholar]
- Kephart, J.; Chess, D. The Vision of Autonomic Computing. IEEE Comput. 2003, 36, 41–50. [Google Scholar] [CrossRef]
- Tomforde, S.; Prothmann, H.; Branke, J.; Hähner, J.; Mnif, M.; Müller-Schloer, C.; Richter, U.; Schmeck, H. Observation and Control of Organic Systems. In Organic Computing—A Paradigm Shift for Complex Systems; Birkhäuser: Basel, Switzerland, 2011; pp. 325–338. [Google Scholar]
- Tomforde, S.; Müller-Schloer, C. Incremental design of adaptive systems. J. Ambient Intell. Smart Environ. 2014, 6, 179–198. [Google Scholar] [CrossRef]
- Tomforde, S.; Goller, M. To Adapt or Not to Adapt: A Quantification Technique for Measuring an Expected Degree of Self-Adaptation. Computers 2020, 9, 21. [Google Scholar] [CrossRef] [Green Version]
- Oreizy, P.; Gorlick, M.M.; Taylor, R.N.; Heimhigner, D.; Johnson, G.; Medvidovic, N.; Quilici, A.; Rosenblum, D.S.; Wolf, A.L. An architecture-based approach to self-adaptive software. IEEE Intell. Syst. Their Appl. 1999, 14, 54–62. [Google Scholar] [CrossRef] [Green Version]
- Idziak, P.; Clarke, S. An Analysis of Decision-Making Techniques in Dynamic, Self-Adaptive Systems. In Proceedings of the 2014 IEEE Eighth International Conference on Self-Adaptive and Self-Organizing Systems Workshops, London, UK, 8–12 September 2014; pp. 137–143. [Google Scholar]
- Brinkschulte, U.; Pacher, M. A Theoretical Examination of a Self-Adaptation Approach to Improve the Real-Time Capabilities in Multi-Threaded Microprocessors. In Proceedings of the 2009 3rd IEEE International Conference on Self-Adaptive and Self-Organizing Systems, San Francisco, CA, USA, 14–18 September 2009; pp. 136–143. [Google Scholar]
- Krupitzer, C.; Roth, F.M.; VanSyckel, S.; Schiele, G.; Becker, C. A survey on engineering approaches for self-adaptive systems. Pervasive Mob. Comput. 2015, 17, 184–206. [Google Scholar] [CrossRef]
- Aldejohann, C.; Rehtanz, C. Plug’n’Control. 2018. Available online: http://www.ie3.tu-dortmund.de/cms/de/Forschung/Schwerpunkte/05_SGTL_u_EMobilitaet/index.html (accessed on 5 December 2019).
- Serugendo, G.D.M.; Gleizes, M.P.; Karageorgos, A. Self-organization in multi-agent systems. Knowl. Eng. Rev. 2005, 20, 165–189. [Google Scholar] [CrossRef] [Green Version]
- Ye, D.; Zhang, M.; Vasilakos, A.V. A survey of self-organization mechanisms in multiagent systems. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 441–461. [Google Scholar] [CrossRef]
- Shehory, O.; Kraus, S. Methods for task allocation via agent coalition formation. Artif. Intell. 1998, 101, 165–200. [Google Scholar] [CrossRef] [Green Version]
- Low, K.H.; Leow, W.K.; Ang, M.H., Jr. Task allocation via self-organizing swarm coalitions in distributed mobile sensor network. In Proceedings of the 19th National Conference on Artifical Intelligence (AAAI’ 04), San Jose, CA, USA, 25–29 July 2004; Volume 4, pp. 28–33. [Google Scholar]
- Liu, W.; Winfield, A.F.; Sa, J.; Chen, J.; Dou, L. Towards energy optimization: Emergent task allocation in a swarm of foraging robots. Adapt. Behav. 2007, 15, 289–305. [Google Scholar] [CrossRef]
- Tanenbaum, A.S.; Van Steen, M. Distributed Systems: Principles and Paradigms; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2017. [Google Scholar]
- Tomforde, S.; Kantert, J.; Sick, B. Measuring Self-organisation at Runtime—A Quantification Method based on Divergence Measures. In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), Porto, Portugal, 24–26 February 2017; Volume 1, pp. 96–106. [Google Scholar]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A survey and analysis of multi-robot coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Edenhofer, S.; Tomforde, S.; Kantert, J.; Klejnowski, L.; Bernard, Y.; Hähner, J.; Müller-Schloer, C. Trust Communities: An Open, Self-Organised Social Infrastructure of Autonomous Agents. In Trustworthy Open Self-Organising Systems; Springer: Cham, Switzerland, 2016; pp. 127–152. [Google Scholar]
- Horling, B.; Lesser, V. Using quantitative models to search for appropriate organizational designs. Auton. Agents Multi-Agent Syst. 2008, 16, 95–149. [Google Scholar] [CrossRef]
- Galbraith, J.R. The evolution of enterprise organization designs. J. Organ. Des. 2012, 1, 1–13. [Google Scholar]
- Valentini, G.; Hamann, H.; Dorigo, M. Self-organized collective decision making: The weighted voter model. In Proceedings of the 13th International Confer- ence on Autonomous Agents and Multiagent System (AAMAS14), Paris, France, 5–9 May 2014; pp. 45–52. [Google Scholar]
- Kantamneni, A.; Brown, L.E.; Parker, G.; Weaver, W.W. Survey of multi-agent systems for microgrid control. Eng. Appl. Artif. Intell. 2015, 45, 192–203. [Google Scholar] [CrossRef]
- Tazi, K.; Abbou, F.M.; Abdi, F. Multi-agent system for microgrids: Design, optimization and performance. Artif. Intell. Rev. 2020, 53, 1233–1292. [Google Scholar] [CrossRef]
- Jianfang, L.; Xiaohui, S.; Xiaoli, M. Hierarchical control model of smart distribution network based on self-organizing multi-agent system. In Proceedings of the International Conference on Renewable Power Generation (RPG 2015), Beijing, China, 17–18 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Nieße, A.; Lehnhoff, S.; Tröschel, M.; Uslar, M.; Wissing, C.; Appelrath, H.J.; Sonnenschein, M. Market-based self-organized provision of active power and ancillary services: An agent-based approach for smart distribution grids. In Proceedings of the 2012 Complexity in Engineering (COMPENG), Aachen, Germany, 11–13 June 2012; pp. 1–5. [Google Scholar]
- Dimeas, A.L.; Hatziargyriou, N.D. Operation of a multiagent system for microgrid control. IEEE Trans. Power Syst. 2005, 20, 1447–1455. [Google Scholar] [CrossRef]
- Li, W.; Li, Y.; Chen, C.; Tan, Y.; Cao, Y.; Zhang, M.; Peng, Y.; Chen, S. A full decentralized multi-agent service restoration for distribution network with DGs. IEEE Trans. Smart Grid 2019, 11, 1100–1111. [Google Scholar] [CrossRef]
- Fredericks, E.M.; Gerostathopoulos, I.; Krupitzer, C.; Vogel, T. Planning as Optimization: Dynamically Discovering Optimal Configurations for Runtime Situations. In Proceedings of the 13th IEEE International Conference on Self-Adaptive and Self-Organizing Systems, (SASO 2019), Umea, Sweden, 16–20 June 2019. [Google Scholar]
- D’Angelo, M.; Gerasimou, S.; Ghahremani, S.; Grohmann, J.; Nunes, I.; Pournaras, E.; Tomforde, S. On learning in collective self-adaptive systems: State of practice and a 3D framework. In Proceedings of the 2019 IEEE/ACM 14th International Symposium on Software Engineering for Adaptive and Self-Managing Systems (SEAMS@ICSE19), Montreal, QC, Canada, 25 May 2019; pp. 13–24. [Google Scholar]
- Rizk, Y.; Awad, M.; Tunstel, E.W. Decision making in multiagent systems: A survey. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 514–529. [Google Scholar] [CrossRef]
- Marinescu, A.; Dusparic, I.; Clarke, S. Prediction-Based Multi-Agent Reinforcement Learning in Inherently Non-Stationary Environments. ACM TAAS 2017, 12, 9:1–9:23. [Google Scholar] [CrossRef] [Green Version]
- Malialis, K.; Devlin, S.; Kudenko, D. Resource Abstraction for Reinforcement Learning in Multiagent Congestion Problems. In Proceedings of the 2016 International Conference on Autonomous Agents & Multiagent Systems (AAMAS’16), Singapore, 9–13 May 2016; pp. 503–511. [Google Scholar]
- Wilson, S.W. Classifier Fitness Based on Accuracy. Evol. Comput. 1995, 3, 149–175. [Google Scholar] [CrossRef]
- Prothmann, H.; Branke, J.; Schmeck, H.; Tomforde, S.; Rochner, F.; Hahner, J.; Muller-Schloer, C. Organic traffic light control for urban road networks. Int. J. Auton. Adapt. Commun. Sys. 2009, 2, 203–225. [Google Scholar] [CrossRef]
- Fredivianus, N.; Kara, K.; Schmeck, H. Stay real! xcs with rule combining for real values. In Proceedings of the 14th Annual Conference Companion on Genetic and Evolutionary Computation (GECCO’12), Philadelphia, PA, USA, 7–11 July 2012; pp. 1493–1494. [Google Scholar]
- Stein, A.; Eymüller, C.; Rauh, D.; Hähner, J. Interpolation-based Classifier Generation in XCSF. In Proceedings of IEEE World Congress on Computational Intelligence (WCCI), Congress on Evolutionary Computation (CEC’16), Vancouver, BC, Canada, 24–29 July 2016; pp. 3990–3998. [Google Scholar]
- Stein, A.; Rauh, D.; Tomforde, S.; Hähner, J. Interpolation in the eXtended Classifier System: An Architectural Perspective. J. Syst. Archit. 2017, 75, 79–94. [Google Scholar] [CrossRef]
- Wong, J.; Lim, Y.S.; Morris, S. Self-intelligent active management system for electrical distribution networks with photovoltaic systems. In Proceedings of the 2nd IET Renewable Power Generation Conference (RPG 2013), Beijing, China, 9–11 September 2013; pp. 1–4. [Google Scholar]
- Ran, L.; Xiaobo, Z.; Qi, Z.; Guowei, L. Economic optimization of self-healing control of power grid based on multi-agent system. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1334–1337. [Google Scholar]
- Roytelman, I.; Medina, J. Volt/VAR control and Conservation Voltage Reduction as a function of advanced DMS. In Proceedings of the 2016 IEEE Power Energy Society Innovative Smart Grid Technologies Conference (ISGT), Minneapolis, MN, USA, 6–9 September 2016; pp. 1–4. [Google Scholar]
- Flatter, F.; Mohammadi, S.; Wellßow, W.; Schinke-Nendza, A.; Blumberg, G.; Weber, C.; Rasti, S.; Schegner, P.; Uhlemeyer, B.; Zdrallek, M.; et al. ZellNetz2050—Structure, Planning and Operation of a Cellular Energy System in 2050. In Proceedings of the International ETG Congress 2021, Virtual, 18–19 March 2021. [Google Scholar]
- Becker, B.; Kern, F.; Lösch, M.; Mauser, I.; Schmeck, H. Building Energy Management in the FZI House of Living Labs. In Proceedings of the Energy Informatics-4th D-A-CH Conference (EI 2015), Karlsruhe, Germany, 12–13 November 2015; pp. 95–112. [Google Scholar]
- Kochanneck, S.; Mauser, I.; Phipps, K.; Schmeck, H. Hardware-in-the-Loop Co-simulation of a Smart Building in a Low-voltage Distribution Grid. In Proceedings of the 2018 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Sarajevo, Bosnia and Herzegovina, 21–25 October 2018; pp. 1–6. [Google Scholar]
- Singh, V.P.; Kishor, N.; Samuel, P. Distributed multi-agent system-based load frequency control for multi-area power system in smart grid. IEEE Trans. Ind. Electron. 2017, 64, 5151–5160. [Google Scholar] [CrossRef]
- Rahman, M.; Mahmud, M.; Oo, A.M.T.; Pota, H.; Hossain, M. Agent-based reactive power management of power distribution networks with distributed energy generation. Energy Convers. Manag. 2016, 120, 120–134. [Google Scholar] [CrossRef]
- Radhakrishnan, B.M.; Srinivasan, D. A multi-agent based distributed energy management scheme for smart grid applications. Energy 2016, 103, 192–204. [Google Scholar] [CrossRef]
- Merdan, M.; Lepuschitz, W.; Strasser, T.; Andren, F. Multi-Agent system for self-optimizing power distribution grids. In Proceedings of the 5th International Conference on Automation, Robotics and Applications, Wellington, New Zealand, 6–8 December 2011; pp. 312–317. [Google Scholar]
- Lepuschitz, W.; Zoitl, A.; Vallée, M.; Merdan, M. Toward self-reconfiguration of manufacturing systems using automation agents. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2010, 41, 52–69. [Google Scholar] [CrossRef]
- Vallee, M.; Merdan, M.; Lepuschitz, W.; Koppensteiner, G. Decentralized reconfiguration of a flexible transportation system. IEEE Trans. Ind. Inform. 2011, 7, 505–516. [Google Scholar] [CrossRef]
- Merdan, M.; Vallee, M.; Lepuschitz, W.; Zoitl, A. Monitoring and diagnostics of industrial systems using automation agents. Int. J. Prod. Res. 2011, 49, 1497–1509. [Google Scholar] [CrossRef]
- Chess, D.M.; Kumar, V.; Segal, A.; Whalley, I. Work in progress: Availability-aware self-configuration in autonomic systems. In Proceedings of the 5th IFIP/IEEE International Workshop on Distributed Systems: Operations and Management (DSOM 2004), Davis, CA, USA, 15–17 November 2004; pp. 257–258. [Google Scholar]
- Schneider, C.; Barker, A.; Dobson, S. A survey of self-healing systems frameworks. Softw. Pract. Exp. 2015, 45, 1375–1398. [Google Scholar] [CrossRef] [Green Version]
- Garlan, D.; Cheng, S.W.; Huang, A.C.; Schmerl, B.; Steenkiste, P. Rainbow: Architecture-based self-adaptation with reusable infrastructure. Computer 2004, 37, 46–54. [Google Scholar] [CrossRef]
- Ahmed, S.; Ahamed, S.I.; Sharmin, M.; Hasan, C.S. Self-healing for autonomic pervasive computing. In Autonomic Communication; Springer: Boston, MA, USA, 2009; pp. 285–307. [Google Scholar]
- Simmonds, J.; Ben-David, S.; Chechik, M. Monitoring and recovery of web service applications. In The Smart Internet; Springer: Berlin/Heidelberg, Germany, 2010; pp. 250–288. [Google Scholar]
- De Lemos, R. The conflict between self-capabilities and predictability. In Proceedings of the Self-Star Workshop, Bertinoro, Italy, 2 June 2004; pp. 219–228. [Google Scholar]
- Calinescu, R. General-purpose autonomic computing. In Autonomic Computing and Networking; Springer: Boston, MA, USA, 2009; pp. 3–30. [Google Scholar]
- Gruhl, C.; Sick, B.; Wacker, A.; Tomforde, S.; Hähner, J. A building block for awareness in technical systems: Online novelty detection and reaction with an application in intrusion detection. In Proceedings of the IEEE 7th International Conference on Awareness Science and Technology (iCAST 2015), Qinhuangdao, China, 22–24 September 2015; pp. 194–200. [Google Scholar]
- Gruhl, C.; Sick, B.; Tomforde, S. Novelty detection in continuously changing environments. Future Gener. Comput. Syst. 2021, 114, 138–154. [Google Scholar] [CrossRef]
- Metzger, A.; Sammodi, O.; Pohl, K. Accurate proactive adaptation of service-oriented systems. In Assurances for Self-Adaptive Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 240–265. [Google Scholar]
- Engel, Y.; Etzion, O. Towards proactive event-driven computing. In Proceedings of the 5th ACM International Conference on Distributed Event-Based System, New York, NY, USA, 11–15 July 2011; pp. 125–136. [Google Scholar]
- Psaier, H.; Skopik, F.; Schall, D.; Dustdar, S. Behavior monitoring in self-healing service-oriented systems. In Proceedings of the 34th Annual Computer Software and Applications Conference, Seoul, Korea, 19–23 July 2010; pp. 357–366. [Google Scholar]
- Miorandi, D.; Lowe, D.; Yamamoto, L. Embryonic models for self–healing distributed services. In Proceedings of the International Conference on Bio-Inspired Models of Network, Information, and Computing Systems (BIONETICS 2009), Avignon, France, 9–11 December 2009; pp. 152–166. [Google Scholar]
- Ramirez, A.J.; Knoester, D.B.; Cheng, B.H.; McKinley, P.K. Plato: A genetic algorithm approach to run-time reconfiguration in autonomic computing systems. Clust. Comput. 2011, 14, 229–244. [Google Scholar] [CrossRef]
- Dean, D.J.; Nguyen, H.; Gu, X. Ubl: Unsupervised behavior learning for predicting performance anomalies in virtualized cloud systems. In Proceedings of the 9th International Conference on Autonomic Computing, San Jose, CA, USA, 18–20 September 2012; pp. 191–200. [Google Scholar]
- Ji, X.; Jian, L.; Yan, X.; Hui, W. Research on self healing technology of smart distribution network based on multi Agent system. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 6132–6137. [Google Scholar]
- Duarte, D.P.; Guaraldo, J.C.; Kagan, H.; Nakata, B.H.; Pranskevicius, P.C.; Suematsu, A.K.; Martinelli, M.M.; Hoshina, M.S. Substation-based self-healing system with advanced features for control and monitoring of distribution systems. In Proceedings of the 2016 17th International Conference on Harmonics and Quality of Power (ICHQP), Belo Horizonte, Brazil, 16–19 October 2016; pp. 301–305. [Google Scholar]
- Crastan, V.; Westermann, D. Elektrische Energieversorgung 3; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Guo, R.; Qu, C.; Vankayala, V.; Crozier, E.; Allen, S.; Adeleye, K. Implementing self-healing distribution systems via fault location, isolation and service restoration. In Proceedings of the 2016 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Vancouver, BC, Canada, 15–18 May 2016; pp. 1–4. [Google Scholar]
- Arif, A.; Ma, S.; Wang, Z. Dynamic Reconfiguration and Fault Isolation for a Self-Healing Distribution System. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; pp. 1–5. [Google Scholar]
- Niu, G.; Zhou, L.; Qi, Z. A novel fault self-recovery strategy for distribution network with distributed generation. In Proceedings of the 2016 China International Conference on Electricity Distribution (CICED), Xi’an, China, 10–13 August 2016; pp. 1–6. [Google Scholar]
- Liu, H.; Chen, X.; Yu, K.; Hou, Y. The Control and Analysis of Self-Healing Urban Power Grid. IEEE Trans. Smart Grid 2012, 3, 1119–1129. [Google Scholar] [CrossRef]
- Baxevanos, I.S.; Labridis, D.P. Software Agents Situated in Primary Distribution Networks: A Cooperative System for Fault and Power Restoration Management. IEEE Trans. Power Deliv. 2007, 22, 2378–2385. [Google Scholar] [CrossRef]
- Brewer, E. CAP twelve years later: How the “rules” have changed. Computer 2012, 45, 23–29. [Google Scholar] [CrossRef]
- Tomforde, S.; Gruhl, C. Fairness, Performance, and Robustness: Is There a CAP Theorem for Self-adaptive and Self-organising Systems? In Proceedings of the 2020 IEEE International Conference on Autonomic Computing and Self-Organizing Systems Companion (ACSOS-C 2020), Washington, DC, USA, 17–21 August 2020; pp. 54–59. [Google Scholar]
- Töbermann, C.; Braun, M.; Asanalieva, N.; Brauns, K.; Diwold, K.; Fetzer, D.; Florez Alzate, F.A. Test- und Simulationsumgebung für Betriebsführungen und Aggregatoren im Smart-Grid (OpSim): BMWi-Verbundprojekt 0325593A-B im Rahmen des 6. Energieforschungsprogrammes der Bundesregierung ”Forschung für eine Umweltschonende, Zuverlässige und Bezahlbare Energieversorgung”: Laufzeit: August 2013 bis Dezember 2017: Abschlussbericht des Projektkonsortiums OpSim; Fraunhofer-Institut für Energiewirtschaft und Energiesystemtechnik IEE: Kassel, Germany, 2018. [Google Scholar]
- Sterbenz, J.P.; Hutchison, D.; Çetinkaya, E.K.; Jabbar, A.; Rohrer, J.P.; Schöller, M.; Smith, P. Redundancy, diversity, and connectivity to achieve multilevel network resilience, survivability, and disruption tolerance invited paper. Telecommun. Syst. 2014, 56, 17–31. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
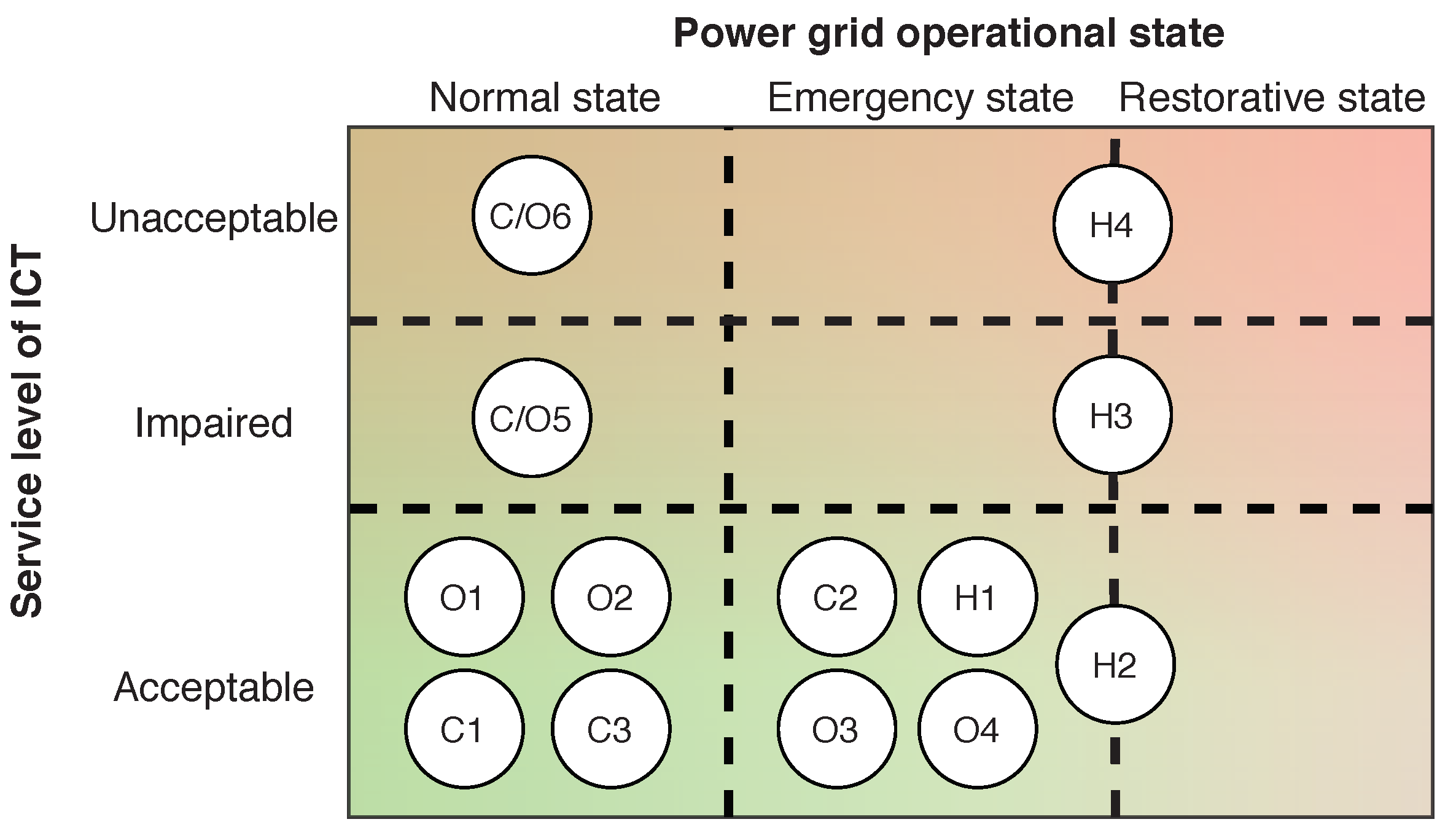
| Use Case | Description |
|---|---|
| C1 | Manual (Dis)connection of a new electrical asset: Self-configuration is required after detection of new assets, as well as self-configuration of the grid model, operational algorithms, local parameters, communication configuration. The new power grid topology needs to be validated based on self-organisation. |
| C2 | Continuous anomaly detection, automatic background process: The system needs to continuously monitor the data streams for anomalies and inconsistencies as could be caused by mal-parameterisation, human failure, or cyber-attacks. If anomalies are detected, the underlying data or control schemes need to be adjusted accordingly. |
| C3 | (Dis)connection of a new agent: Every O-HEMS or O-DMS (agent) must perform self-configuration to adapt to the new overall system. This further requires self-organisation for determining the best possible system structure. |
| O1 | Self- and environment-awareness (including state estimation and forecasting): The basis for optimisation of electrical grids is the knowledge of the relevant grid variables. A state estimation ensures that such knowledge is available, even when a low number of real-time measurements is available, which is typically the case for distribution grids. Forecasting provides projections into the future, which can be strongly beneficial for control strategies. In principle, both, O-HEMS and O-DMS, must be self- and environment-aware. |
| O2 | Normal operation and self-optimisation: During normal operation, key performance indicators are inside their defined boundaries. Nevertheless, self-optimisation of agents can improve their conditions further, e.g., to minimise system losses or increase self-consumption of energy. |
| O3 | Voltage limit violation (no circuit breaker tripping): High load, high DG, or a sub-optimal switching configuration can cause voltage limit violations in a grid zone. Self-optimising agents need to choose between different measures to push the voltage back inside limits. Measures can be self-optimisation via load management, active and reactive power control of DG, flexibilities/storage, switching state reconfiguration, or transformer tap adjustments. |
| O4 | Thermal line/transformer limit violation (no circuit breaker tripping): The current flowing through grid assets is bound by thermal limits, which should not be violated for longer than a specific period or failures can occur. Similar to the use case O2, agents need to be aware of potential limit violations and use available measures to alleviate the limit violation. |
| C/O5 | Unreliable communication for the asset(s): Communication between the agents can become unreliable, e.g., faulty measurement devices produce unreliable measurements that should not be used further. The communication network can become unstable, e.g., exhibit packet loss. Agents need to identify unreliable data streams and self-adapt accordingly. |
| C/O6 | Interrupted communication for the asset(s): If technical issues appear in the communication network used for self-coordination, the exchange of information becomes unreliable or interrupted completely. Similarly to C/O5, agents need to self-adapt, e.g., by using an alternative channel of communication or by changing their control scheme from central to local control strategies. |
| H1 | Self-protection: In the case of an asset failure or a manual mal-configuration, events such as blackouts can occur. For such cases, a self-protecting O-DMS prepares contingency strategies so that a minimum number of customers are affected. |
| H2 | Self-healing/reconfiguration: If the self-protection is not successfully performed, a self-healing and reconfiguration scheme must be run. The scheme can trigger individual parts of a grid to operate as autonomous islands without connection to the higher voltage level (self-islanding) and may require changes in control strategies of O-HEMS etc. (e.g., switching to local control strategies). The process includes decoupling from the interconnected grid, a black start, islanding operation with suitable control strategies and re-synchronisation when self-islanding is no longer optimal. |
| H3 | Self-healing under impaired ICT: Impaired ICT connections pose an additional challenge for self-healing schemes. O-DMS and O-HEMS need to evaluate the limited control options and prioritise operational limit violations, e.g., allow for thermal overloading up to a certain time frame to avoid a (partial) blackout. |
| H4 | Blackout in the communication grid: A blackout in the communication grid prevents coordination among the different agents. The O-DMS needs to evaluate and activate alternative means of communication. If that is not possible, the agents need to switch to local control strategies automatically. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loeser, I.; Braun, M.; Gruhl, C.; Menke, J.-H.; Sick, B.; Tomforde, S. The Vision of Self-Management in Cognitive Organic Power Distribution Systems. Energies 2022, 15, 881. https://doi.org/10.3390/en15030881
Loeser I, Braun M, Gruhl C, Menke J-H, Sick B, Tomforde S. The Vision of Self-Management in Cognitive Organic Power Distribution Systems. Energies. 2022; 15(3):881. https://doi.org/10.3390/en15030881
Chicago/Turabian StyleLoeser, Inga, Martin Braun, Christian Gruhl, Jan-Hendrik Menke, Bernhard Sick, and Sven Tomforde. 2022. "The Vision of Self-Management in Cognitive Organic Power Distribution Systems" Energies 15, no. 3: 881. https://doi.org/10.3390/en15030881
APA StyleLoeser, I., Braun, M., Gruhl, C., Menke, J.-H., Sick, B., & Tomforde, S. (2022). The Vision of Self-Management in Cognitive Organic Power Distribution Systems. Energies, 15(3), 881. https://doi.org/10.3390/en15030881