
Robust Fractional MPPT-Based Moth-Flame Optimization Algorithm for Thermoelectric Generation Applications




Abstract
1. Introduction
2. Brief Overviews on Common MPPT Approaches
2.1. Perturb and Observe
2.2. INR Depends upon Integer Control
3. TEG Modeling and MPPTS Implementation/Performance Analysis
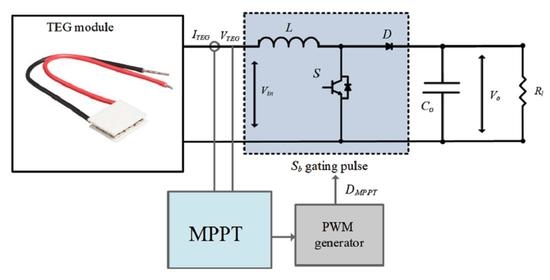
3.1. TEG Model
3.2. Improved Fractional MPPT
4. Recent Optimization Algorithms
4.1. Moth-Flame Optimizer
4.2. Particle Swarm Optimizer (PSO)
4.3. Genetic Algorithm (GA)
- (I)
- Initialization. Produce the N individuals in the random form of the “initial population”, setting the evolution number.
- (II)
- Individual estimation. Estimate the fitness of every parameter according to the estimated criteria.
- (III)
- Population evolution. Perform the election, crossover, and mutation operations to deduce the step generation.
- (IV)
- Terminus check. If the fitness or iterations achieve their maximum solutions, stop the estimation process at that time; otherwise, return to (II).
4.4. Seagull Optimization Algorithm (SOA)
- I.
- Avoid collision: variable A is employed to evaluate the innovative positioning of the seagull’s search, in order to avoid collisions with other searches:
- II.
- Best position: After avoiding overlapping via other seagulls, seagulls can transfer in the direction of the innovative positioning:
- III.
- Near the best search seagull: After the seagull moves into a position where it does not struggle with others, it moves into the best position in order to achieve its new position:
4.5. Grey Wolf Optimization (GWO)
4.6. Tunicate Swarm Algorithm
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Olabi, A.G. 100% sustainable energy. Energy 2014, 77, 1–5. [Google Scholar] [CrossRef]
- Olabi, A.; Abdelkareem, M. Energy storage systems towards 2050. Energy 2020, 219, 119634. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Gagliano, S. Imperfections in Integrated Devices Allow the Emergence of Unexpected Strange Attractors in Electronic Circuits. IEEE Access 2021, 9, 29573–29583. [Google Scholar] [CrossRef]
- Akram, N.; Khan, L.; Agha, S.; Hafeez, K. Global Maximum Power Point Tracking of Partially Shaded PV System Using Advanced Optimization Techniques. Energies 2022, 15, 4055. [Google Scholar] [CrossRef]
- Rezk, H.; Ali, Z.M.; Abdalla, O.; Younis, O.; Gomaa, M.R.; Hashim, M. Hybrid Moth-Flame Optimization Algorithm and Incremental Conductance for Tracking Maximum Power of Solar PV/Thermoelectric System under Different Conditions. Mathematics 2019, 7, 875. [Google Scholar] [CrossRef]
- Olabi, A. State of the art on renewable and sustainable energy. Energy 2013, 61, 2–5. [Google Scholar] [CrossRef]
- Atems, B.; Hotaling, C. The effect of renewable and nonrenewable electricity generation on economic growth. Energy Policy 2018, 112, 111–118. [Google Scholar] [CrossRef]
- Olabi, A.; Abdelkareem, M.A. Renewable energy and climate change. Renew. Sustain. Energy Rev. 2022, 158, 112111. [Google Scholar] [CrossRef]
- Ando Junior, O.H.; Maran, A.L.O.; Henao, N.C. A review of the development and applications of thermoelectric microgenerators for energy harvesting. Renew. Sustain. Energy Rev. 2018, 91, 376–393. [Google Scholar] [CrossRef]
- Twaha, S.; Zhu, J.; Yan, Y.; Li, B.; Huang, K. Performance analysis of thermoelectric generator using dc-dc converter with incremental conductance based maximum power point tracking. Energy Sustain. Dev. 2017, 37, 86–98. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, M.; Zhang, X.; Wang, J.; Shu, H.; Li, S.; He, T.; Yang, L.; Yu, T. Fast atom search optimization based MPPT design of centralized thermoelectric generation system under heterogeneous temperature difference. J. Clean. Prod. 2019, 248, 119301. [Google Scholar] [CrossRef]
- Zheng, X.; Liu, C.; Yan, Y.; Wang, Q. A review of thermoelectrics research – Recent developments and potentials for sustainable and renewable energy applications. Renew. Sustain. Energy Rev. 2014, 32, 486–503. [Google Scholar] [CrossRef]
- Mojtaba, M.; Alireza, R.; Lasse, R. Power optimization and economic evaluation of thermoelectric waste heat recovery system around a rotary cement kiln. J. Clean. Prod. 2019, 232, 1321–1334. [Google Scholar]
- Matthew, B.; Jae, D.P. Current-sensorless power estimation and MPPT implementation for thermoelectric generators. IEEE Trans. Indust. Elect. 2015, 62, 5539–5548. [Google Scholar]
- Gou, X.; Xiao, H.; Yang, S. Modeling, experimental study and optimization on low-temperature waste heat thermoelectric generator system. Appl. Energy 2010, 87, 3131–3136. [Google Scholar] [CrossRef]
- Rowe, D. Thermoelectrics, an environmentally-friendly source of electrical power. Renew. Energy 1999, 16, 1251–1256. [Google Scholar] [CrossRef]
- Liang, G.; Zhou, J.; Huang, X. Analytical model of parallel thermoelectric generator. Appl. Energy 2011, 88, 5193–5199. [Google Scholar] [CrossRef]
- Chen, M.; Rosendahl, L.; Condra, T. A three-dimensional numerical model of thermoelectric generators in fluid power systems. Int. J. Heat Mass Transf. 2010, 54, 345–355. [Google Scholar] [CrossRef]
- Kramer, L.R.; Maran, A.L.O.; de Souza, S.S.; Junior, O.H.A. Analytical and Numerical Study for the Determination of a Thermoelectric Generator’s Internal Resistance. Energies 2019, 12, 3053. [Google Scholar] [CrossRef]
- Kim, S. Analysis and modeling of effective temperature differences and electrical parameters of thermoelectric generators. Appl. Energy 2013, 102, 1458–1463. [Google Scholar] [CrossRef]
- Ding, L.; Akbarzadeh, A.; Tan, L. A review of power generation with thermoelectric system and its alternative with solar ponds. Renew. Sustain. Energy Rev. 2018, 81, 799–812. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, S.; Ge, M.; Li, Y.; Liang, Z. Analysis of thermoelectric generation characteristics of flue gas waste heat from natural gas boiler. Energy Convers. Manag. 2017, 148, 820–829. [Google Scholar] [CrossRef]
- Montecucco, A.; Siviter, J.; Knox, A. Combined heat and power system for stoves with thermoelectric generators. Appl. Energy 2017, 185, 1336–1342. [Google Scholar] [CrossRef]
- Moh’d, A.A.; Ahmed, A.A. Internal combustion engine waste heat recovery by a thermoelectric generator inserted at combustion chamber walls. Intern. J. Energ. Res. 2018, 42, 4853–4865. [Google Scholar]
- Cao, Q.; Luan, W.; Wang, T. Performance enhancement of heat pipes assisted thermoelectric generator for automobile exhaust heat recovery. Appl. Therm. Eng. 2018, 130, 1472–1479. [Google Scholar] [CrossRef]
- Ioan, S.; Alexandru, D. A comprehensive review of solar thermoelectric cooling systems. Int. J. Energy Res. 2018, 42, 395–415. [Google Scholar]
- Li, L.; Gao, X.; Zhang, G.; Xie, W.; Wang, F.; Yao, W. Combined solar concentration and carbon nanotube absorber for high performance solar thermoelectric generators. Energy Convers. Manag. 2019, 183, 109–115. [Google Scholar] [CrossRef]
- Kashif, I.; Khairul, H.; Saidur, R.; Kareem, M.W.; Bidyut, B.S. Study of thermoelectric and photovoltaic facade system for energy efficient building development: A review. J. Clean. Prod. 2019, 209, 1376–1395. [Google Scholar]
- Khatua, S.; Mukherjee, V. Application of integrated microgrid for strengthening the station blackout power supply in nuclear power plant. Prog. Nucl. Energy 2019, 118, 103132. [Google Scholar] [CrossRef]
- Kanagaraj, N. An Enhanced Maximum Power Point Tracking Method for Thermoelectric Generator Using Adaptive Neuro-Fuzzy Inference System. J. Electr. Eng. Technol. 2021, 16, 1207–1218. [Google Scholar] [CrossRef]
- Tang, Z.B.; Deng, Y.D.; Su, C.Q.; Shuai, W.W.; Xie, C.J. A research on thermoelectric generator’s electrical performance under temperature mismatch conditions for automotive waste heat recovery system. Case Stud. Therm. Eng. 2015, 5, 143–150. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Y.; Sui, X.; Li, W.; Xu, D. Performance of Thermoelectric Power-Generation System for Sufficient Recovery and Reuse of Heat Accumulated at Cold Side of TEG with Water-Cooling Energy Exchange Circuit. Energies 2020, 13, 5542. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Sbita, L. A Robust Maximum Power Point Tracking Control Method for a PEM Fuel Cell Power System. Appl. Sci. 2018, 8, 2449. [Google Scholar] [CrossRef]
- Fathy, A.; Abdelkareem, M.A.; Olabi, A.; Rezk, H. A novel strategy based on salp swarm algorithm for extracting the maximum power of proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2020, 46, 6087–6099. [Google Scholar] [CrossRef]
- Montecucco, A.; Knox, A.R. Maximum Power Point Tracking Converter Based on the Open-Circuit Voltage Method for Thermoelectric Generators. IEEE Trans. Power Electron. 2014, 30, 828–839. [Google Scholar] [CrossRef]
- Al-Dhaifallaha, M.; Nassefa, A.M.; Rezk, H.; Nisar, K.S. Maximum Power Point Tracking Converter Based on the Open-Circuit Voltage Method for Thermoelectric Generators. Solar Energy 2018, 159, 650–664. [Google Scholar]
- Taghvaee, M.; Radzi, M.A.M.; Moosavain, S.; Hizam, H.; Marhaban, M.H. A current and future study on non-isolated DC–DC converters for photovoltaic applications. Renew. Sustain. Energy Rev. 2012, 17, 216–227. [Google Scholar] [CrossRef]
- Shanmugam, S.; Eswaramoorthy, M.; Veerappan, A.R. Modeling and Analysis of a Solar Parabolic Dish Thermoelectric Generator. Energy Sources Part A Recover. Util. Environ. Eff. 2014, 36, 1531–1539. [Google Scholar] [CrossRef]
- Datasheet “TEG1-12611-6.0”. Available online: https://thermoelectric-generator.com/product/teg1-12611-6-0/.pdf (accessed on 29 April 2022).
- Tolba, M.A.; Diab, A.A.Z.; Tulsky, V.N.; Abdelaziz, A.Y. LVCI approach for optimal allocation of distributed generations and capacitor banks in distribution grids based on moth–flame optimization algorithm. Electr. Eng. 2018, 100, 2059–2084. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks IV, Perth, WA, Australia, 27 November–1 December 1995; IEEE Service Center: Piscataway, NJ, USA, 1995; pp. 1942–1948. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An introductory analysis with applications to biology, Control, and Artificial Intelligence; University of Michigan Press: Ann Arbor, MI, USA, 1975; pp. 126–137. [Google Scholar]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowledge-Based Syst. 2018, 165, 169–196. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Kaur, S.; Awasthi, L.K.; Sangal, A.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | PSO | GA | GWO | SOA | TSA | MFO |
|---|---|---|---|---|---|---|
| Kp | 0.03346 | 0.0332 | 0.03765 | 0.001 | 0.03517 | 0.03484 |
| Ki | 6.6776 | 5.47598 | 8.43451 | 5.37608 | 6.80429 | 6.74872 |
| λ | 0.98458 | 0.9425 | 1.01008 | 0.96099 | 0.98341 | 0.97195 |
| Best | 1.3757 | 1.37131 | 1.37666 | 1.35983 | 1.37637 | 1.37654 |
| Worst | 0.57694 | 0.57855 | 0.61278 | 0.61346 | 0.57694 | 1.32855 |
| Average | 1.10599 | 1.01886 | 1.22265 | 1.27003 | 0.99796 | 1.35336 |
| Median | 1.32888 | 0.98622 | 1.33279 | 1.32663 | 0.88528 | 1.36039 |
| Variance | 0.10116 | 0.07906 | 0.07181 | 0.03379 | 0.10765 | 0.00039 |
| STD | 0.31806 | 0.28117 | 0.26797 | 0.18381 | 0.32809 | 0.01968 |
| Efficiency | 80.34 | 74.01 | 88.81 | 92.25 | 72.49 | 98.31 |
| Run | PSO | GA | GWO | SOA | TSA | MFO |
|---|---|---|---|---|---|---|
| 1 | 0.7275 | 0.98487 | 0.66567 | 1.32692 | 1.34837 | 0.7275 |
| 2 | 1.32642 | 0.6494 | 0.72989 | 1.32339 | 1.33145 | 1.32642 |
| 3 | 1.36623 | 0.98896 | 1.37666 | 1.32788 | 0.79893 | 1.36623 |
| 4 | 1.32796 | 0.98757 | 1.37658 | 1.32692 | 0.95236 | 1.32796 |
| 5 | 1.36341 | 1.3341 | 1.33073 | 1.29897 | 1.33072 | 1.36341 |
| 6 | 0.78113 | 1.13202 | 1.32812 | 1.32594 | 1.37637 | 0.78113 |
| 7 | 1.3757 | 1.25871 | 1.32974 | 1.32567 | 1.3662 | 1.3757 |
| 8 | 1.33915 | 1.36677 | 1.3431 | 1.32695 | 0.81821 | 1.33915 |
| 9 | 1.36749 | 0.954 | 0.6128 | 1.32635 | 0.99846 | 1.36749 |
| 10 | 1.33397 | 0.78581 | 1.32907 | 1.32796 | 0.60274 | 1.33397 |
| 11 | 0.71208 | 1.36086 | 1.37663 | 1.32712 | 0.72919 | 0.71208 |
| 12 | 1.32979 | 0.71163 | 1.37553 | 1.32813 | 0.57694 | 1.32979 |
| 13 | 0.57694 | 1.37131 | 1.32908 | 1.33037 | 1.37229 | 0.57694 |
| 14 | 1.33174 | 1.34647 | 1.3758 | 1.32841 | 0.60788 | 1.33174 |
| 15 | 0.79199 | 1.35541 | 0.9682 | 1.32886 | 1.37614 | 0.79199 |
| 16 | 1.36184 | 0.76559 | 1.32951 | 1.32853 | 0.74956 | 1.36184 |
| 17 | 0.60096 | 1.36479 | 1.32977 | 1.34926 | 0.65741 | 0.60096 |
| 18 | 1.34176 | 1.33324 | 1.33486 | 1.32278 | 1.37621 | 1.34176 |
| 19 | 0.68507 | 1.27144 | 1.32935 | 1.31073 | 1.33099 | 0.68507 |
| 20 | 1.37222 | 0.83586 | 1.37666 | 1.32082 | 0.73083 | 1.37222 |
| 21 | 1.31299 | 0.75334 | 1.33693 | 1.35316 | 0.72919 | 1.31299 |
| 22 | 0.70488 | 0.80483 | 1.32986 | 1.32764 | 0.57694 | 0.70488 |
| 23 | 1.37224 | 1.28026 | 1.37597 | 1.31712 | 1.37229 | 1.37224 |
| 24 | 1.34435 | 0.78767 | 1.37636 | 1.35983 | 0.60788 | 1.34435 |
| 25 | 0.68323 | 0.72389 | 1.37524 | 0.61346 | 1.37614 | 0.68323 |
| 26 | 1.35098 | 0.66111 | 1.36457 | 1.02836 | 0.74956 | 1.35098 |
| 27 | 0.61278 | 1.34672 | 0.61278 | 1.32538 | 0.65741 | 0.61278 |
| 28 | 1.36042 | 0.60955 | 1.37606 | 1.32562 | 1.37621 | 1.36042 |
| 29 | 0.73653 | 0.57855 | 1.37126 | 1.32487 | 1.33099 | 0.73653 |
| 30 | 1.28803 | 0.86116 | 0.61278 | 0.61346 | 0.73083 | 1.28803 |
| Source | SS | df | MS | F | p-Value > F |
|---|---|---|---|---|---|
| Columns | 3.075 | 5 | 0.615 | 9.06 | 1.13667 × 10−7 |
| Error | 11.8145 | 174 | 0.0679 | ||
| Total | 14.8904 | 179 |
| Time Period | Hot-Side Temperature | Cold-Side Temperature | Load Resistance | TEG Maximum Power | TEG Current at MPP | TEG Voltage at MPP |
|---|---|---|---|---|---|---|
| 0 s to 0.25 s | 250 °C | 50 °C | 10 Ω | 9.4 W | 2.88 A | 3.25 V |
| 0.25 s to 0.6 s | 300 °C | 30 °C | 10 Ω | 14.6 W | 3.4 A | 4.2 V |
| 0.6 s to 0.8 s | 300 °C | 30 °C | 5 Ω | 14.6 W | 3.4 A | 4.2 V |
| 0.8 s to 1.0 s | 250 °C | 50 °C | 5 Ω | 9.4 W | 2.88 A | 3.25 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rezk, H.; Zaky, M.M.; Alhaider, M.; Tolba, M.A. Robust Fractional MPPT-Based Moth-Flame Optimization Algorithm for Thermoelectric Generation Applications. Energies 2022, 15, 8836. https://doi.org/10.3390/en15238836
Rezk H, Zaky MM, Alhaider M, Tolba MA. Robust Fractional MPPT-Based Moth-Flame Optimization Algorithm for Thermoelectric Generation Applications. Energies. 2022; 15(23):8836. https://doi.org/10.3390/en15238836
Chicago/Turabian StyleRezk, Hegazy, Magdy M. Zaky, Mohemmed Alhaider, and Mohamed A. Tolba. 2022. "Robust Fractional MPPT-Based Moth-Flame Optimization Algorithm for Thermoelectric Generation Applications" Energies 15, no. 23: 8836. https://doi.org/10.3390/en15238836
APA StyleRezk, H., Zaky, M. M., Alhaider, M., & Tolba, M. A. (2022). Robust Fractional MPPT-Based Moth-Flame Optimization Algorithm for Thermoelectric Generation Applications. Energies, 15(23), 8836. https://doi.org/10.3390/en15238836