
Sliding-Mode Current Control with Exponential Reaching Law for a Three-Phase Induction Machine Fed by a Direct Matrix Converter

 , ,
, ,  ,
,  ,
,  and
and 
Abstract
1. Introduction
- Reduced volume as a consequence of the lack of large energy-storage capacitors,
- Decreased conduction losses and
2. System Conversion Description
2.1. IM Mathematical Model
2.2. Classic SMC
2.3. SMC Design
2.3.1. Sliding Surface Design
2.3.2. Control Effort Design
2.3.3. SMC-ERL Design
3. Design of Current Controllers Based on SMC Technique
3.1. Classic SMC
3.2. Current Controller Based on SMC-ERL
3.3. Stability Analysis
4. Simulation Results
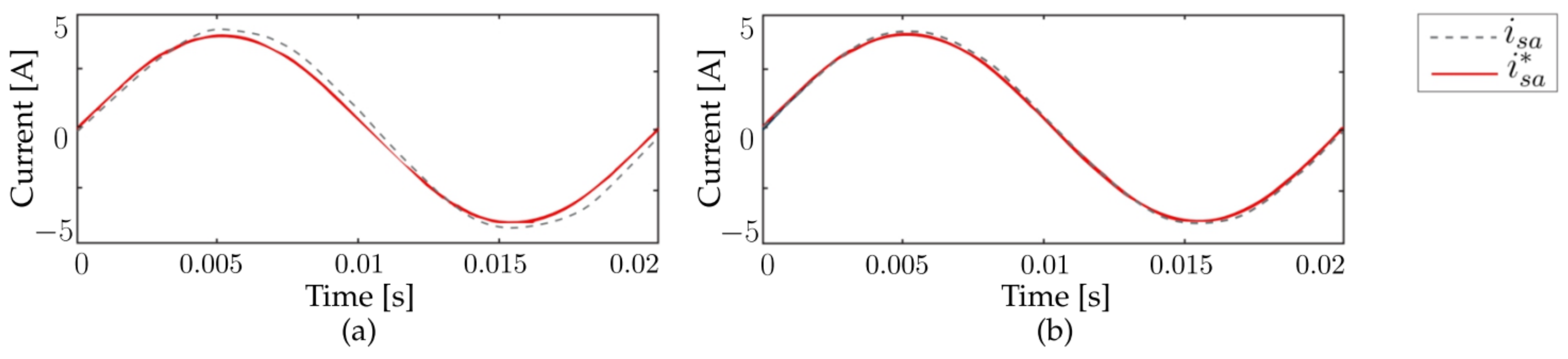
4.1. Steady-State Analysis
4.2. SMC-ERL Gain Tuning
4.3. Sensitivity Analysis to Parameter Variation
4.4. Analysis in Response to Frequency Variation of the Reference Current
4.5. Analysis of Electrical Frequency Variation
5. Experimental Results
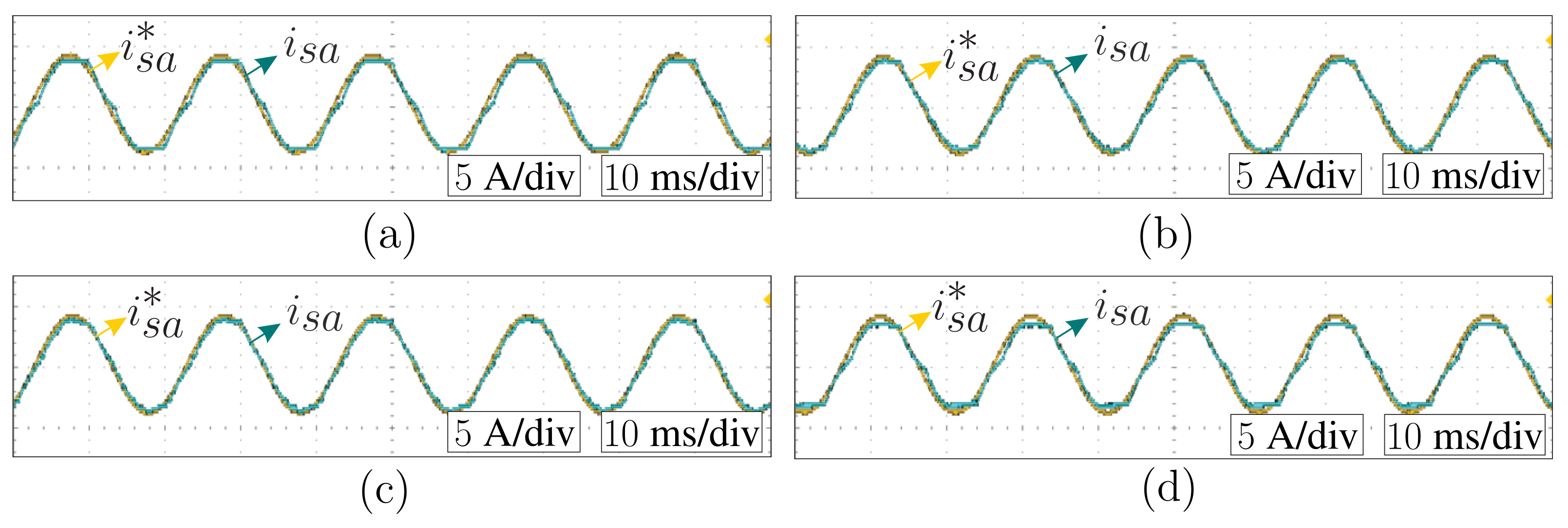
5.1. Steady-State Analysis of SMC-ERL
5.2. SMC-ERL Gain Adjustments
5.3. Sensitivity Analysis to Parameter Variation
5.4. Analysis against the Variation of Frequency of the Reference Current
5.5. Analysis against Variation in the Electrical Frequency
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BTB | Back-to-back |
| DMC | Direct matrix converter |
| DTC | Direct torque control |
| ERL | Exponential reaching law |
| FCS-MPC | Finite-control-set model predictive control |
| FOC | Field oriented control |
| FPGA | Field-programmable gate array |
| IGBT | Insulated gate bipolar transistor |
| IM | Induction machine |
| NPC | Neutral point clamped |
| PCC | Predictive current control |
| PTC | Predictive torque control |
| RMSE | Root mean square error |
| SiC-MOSFETs | Silicon carbide-metal-oxide-semiconductor field-effect transistors |
| SMC | Sliding mode control |
| SVM | Space vector modulation |
| THD | Total harmonic distortion |
| VSI | Voltage source inverter |
References
- Roy, P.; He, J.; Zhao, T.; Singh, Y.V. Recent Advances of Wind-Solar Hybrid Renewable Energy Systems for Power Generation: A Review. IEEE Open J. Ind. Electron. Soc. 2022, 3, 81–104. [Google Scholar] [CrossRef]
- Islam, M.A.; Singh, J.G.; Jahan, I.; Lipu, M.H.; Jamal, T.; Elavarasan, R.M.; Mihet-Popa, L. Modeling and Performance Evaluation of ANFIS Controller-Based Bidirectional Power Management Scheme in Plug-In Electric Vehicles Integrated With Electric Grid. IEEE Access 2021, 9, 166762–166780. [Google Scholar] [CrossRef]
- Bento, A.; Paraíso, G.; Costa, P.; Zhang, L.; Geury, T.; Pinto, S.F.; Silva, J.F. On the potential contributions of matrix converters for the future grid operation, sustainable transportation and electrical drives innovation. Appl. Sci. 2021, 11, 4597. [Google Scholar] [CrossRef]
- Khosravi, M.; Amirbande, M.; Khaburi, D.A.; Rivera, M.; Riveros, J.; Rodriguez, J.; Wheeler, P. Review of model predictive control strategies for matrix converters. IET Power Electron. 2019, 12, 3021–3032. [Google Scholar] [CrossRef]
- Bogdan, J.D.I.; Wilamowski, M. (Eds.) The Industrial Electronics Handbook; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Rodas, J.; Gregor, R.; Takase, Y.; Gregor, D.; Franco, D. Multi-modular matrix converter topology applied to the six-phase wind energy generator. In Proceedings of the 2015 50th International Universities Power Engineering Conference, Stoke on Trent, UK, 1–4 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Toledo, S.; Gregor, R.; Rivera, M.; Rodas, J.; Gregor, D.; Caballero, D.; Gavilán, F.; Maqueda, E. Multi-modular matrix converter topology applied to distributed generation systems. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Toledo, S.; Rivera, M.; Gregor, R.; Rodas, J.; Comparatore, L. Predictive current control with reactive power minimization in six-phase wind energy generator using multi-modular direct matrix converter. In Proceedings of the 2016 IEEE ANDESCON, Arequipa, Peru, 19–21 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Gyugyi, L.; Pelly, B.R. Static Power Frequency Changers: Theory, Performance, and Application; Wiley: Hoboken, NJ, USA, 1976. [Google Scholar]
- Ming, L.; Ding, W.; Gao, Z.; Yin, C.; Chen, M.; Loh, P.C.; Xin, Z. A SiC-Si Hybrid Module for Direct Matrix Converter with Mitigated Current Spikes. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 3805–3817. [Google Scholar] [CrossRef]
- Toledo, S.; Maqueda, E.; Rivera, M.; Gregor, R.L.; Caballero, D.; Gavilán, F.; Rodas, J. Experimental assessment of IGBT and SiC-MOSFET based technologies for matrix converter using predictive current control. In Proceedings of the 2017 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Pucon, Chile, 18–20 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Maqueda, E.; Toledo, S.; Gregor, R.; Caballero, D.; Gavilán, F.; Rodas, J.; Rivera, M.; Wheeler, P. An assessment of predictive current control applied to the direct matrix converter based on SiC-MOSFET bidirectional switches. In Proceedings of the 2017 IEEE Southern Power Electronics Conference (SPEC), Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Taylor, D.G. Nonlinear control of electric machines: An overview. IEEE Control Syst. Mag. 1994, 14, 41–51. [Google Scholar] [CrossRef]
- Chikondra, B.; Muduli, U.R.; Behera, R.K. Improved DTC technique for THL-NPC VSI fed five-phase induction motor drive based on VVs assessment over a wide speed range. IEEE Trans. Power Electron. 2021, 37, 1972–1981. [Google Scholar] [CrossRef]
- Desingu, K.; Selvaraj, R.; Kumar, B.A.; Chelliah, T.R. Thermal performance improvement in multi-megawatt power converters serving to asynchronous hydro generators operating around synchronous speed. IEEE Trans. Energy Convers. 2020, 36, 1818–1830. [Google Scholar] [CrossRef]
- Ni, K.; Hu, Y.; Gan, C. Parameter deviation effect study of the power generation unit on a doubly-fed induction machine-based shipboard propulsion system. CES Trans. Electr. Mach. Syst. 2020, 4, 339–348. [Google Scholar] [CrossRef]
- Xu, W.; Ali, M.M. One improved sliding mode DTC for linear induction machines based on linear metro. IEEE Trans. Power Electron. 2020, 36, 4560–4571. [Google Scholar] [CrossRef]
- Taha, W.; Azer, P.; Poorfakhraei, A.; Dhale, S.; Emadi, A. Comprehensive Analysis and Evaluation of DC-Link Voltage and Current Ripples in Symmetric and Asymmetric Two-Level Six-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2022. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Dorrell, D.G. Control and applications of direct matrix converters: A review. Chin. J. Electr. Eng. 2018, 4, 18–27. [Google Scholar] [CrossRef]
- Arnanz, R.; García, F.J.; Miguel, L.J. Métodos de control de motores de inducción: Síntesis de la situación actual. Rev. Iberoam. Autom. Inf. Ind. 2016, 13, 381–392. [Google Scholar] [CrossRef]
- Alzate, G.A.; Escobar, M.A.; Torres, C.A. Control vectorial de la máquina de inducción. Sci. Tech. 2009, 3. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Kral, M.; Gono, R. Dynamic model of asynchronous machine. In Proceedings of the 2017 18th International Scientific Conference on Electric Power Engineering (EPE), Kouty nad Desnou, Czech Republic, 17–19 May 2017. [Google Scholar] [CrossRef]
- Maqueda, E.; Toledo, S.; Caballero, D.; Gavilan, F.; Rodas, J.; Ayala, M.; Delorme, L.; Gregor, R.; Rivera, M. Speed Control of a Six-Phase IM Fed by a Multi-Modular Matrix Converter Using an Inner PTC with Reduced Computational Burden. IEEE Access 2021, 9, 160035–160047. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Flores-Bahamonde, F.; Acuna, P.; Novak, M.; Zhang, Y.; Tarisciotti, L.; Davari, S.A.; Zhang, Z.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part I: Basic Concepts and Advanced Strategies. IEEE Trans. Power Electron. 2022, 37, 3927–3942. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Davari, S.A.; Rodas, J.; Valencia, D.F.; Elmorshedy, M.; Wang, F.; Zuo, K.; Tarisciotti, L.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part II: Applications and Benchmarking With Classical Control Methods. IEEE Trans. Power Electron. 2022, 37, 5047–5061. [Google Scholar] [CrossRef]
- Wang, F.; Mei, X.; Rodriguez, J.; Kennel, R. Model predictive control for electrical drive systems—An overview. CES Trans. Electr. Mach. Syst. 2017, 1, 219–230. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Xu, W.; El-Sousy, F.F.M.; Islam, M.R.; Ahmed, A.A. Recent Achievements in Model Predictive Control Techniques for Industrial Motor: A Comprehensive State-of-the-Art. IEEE Access 2021, 9, 58170–58191. [Google Scholar] [CrossRef]
- Wei, Y.; Sun, L.; Chen, Z. An Improved Sliding Mode Control Method to Increase the Speed Stability of Permanent Magnet Synchronous Motors. Energies 2022, 15, 6313. [Google Scholar] [CrossRef]
- Hajihosseini, M.; Lešić, V.; Shaheen, H.I.; Karimaghaee, P. Sliding Mode Controller for Parameter-Variable Load Sharing in Islanded AC Microgrid. Energies 2022, 15, 6029. [Google Scholar] [CrossRef]
- Luo, B.-Y.; Subroto, R.K.; Wang, C.-Z.; Lian, K.-L. An Improved Sliding Mode Control with Integral Surface for a Modular Multilevel Power Converter. Energies 2022, 15, 1704. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B. Model Predictive Control of Wind Energy Conversion Systems; John Wiley & Sons: Hoboken, NJ, USA, 2020; ISBN 978-1-118-98858-9. [Google Scholar]
- Rodas, J.; Martín, C.; Arahal, M.R.; Barrero, F.; Gregor, R. Influence of Covariance-Based ALS Methods in the Performance of Predictive Controllers with Rotor Current Estimation. IEEE Trans. Ind. Electron. 2017, 64, 2602–2607. [Google Scholar] [CrossRef]
- Rodas, J.; Barrero, F.; Arahal, M.R.; Martín, C.; Gregor, R. Online Estimation of Rotor Variables in Predictive Current Controllers: A Case Study Using Five-Phase Induction Machines. IEEE Trans. Ind. Electron. 2016, 63, 5348–5356. [Google Scholar] [CrossRef]
- Ayala, M.; Doval-Gandoy, J.; Rodas, J.; González, O.; Gregor, R. Current control designed with model based predictive control for six-phase motor drives. ISA Trans. 2020, 98, 496–504. [Google Scholar] [CrossRef]
- Liu, J.K.; Wang, X. Advanced Sliding Mode Control for Mechanical Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Liu, J.; Gao, Y.; Yin, Y.; Wang, J.; Luo, W.; Sun, G. Sliding Mode Control Methodology in the Applications of Industrial Power Systems; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Derbel, N.; Ghommam, J.; Zhu, Q. Applications of Sliding Mode Control; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Longfei, J.; Yuping, H.; Jigui, Z.; Jing, C.; Yunfei, T.; Pengfei, L. Fuzzy Sliding Mode Control of Permanent Magnet Synchronous Motor Based on the Integral Sliding Mode Surface. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Latosiński, P. Sliding mode control based on the reaching law approach—A brief survey. In Proceedings of the 2017 22nd International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 28–31 August 2017; pp. 519–524. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-Mode Robot Control With Exponential Reaching Law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Matrix converter modulation strategies: A new general approach based on space-vector representation of the switch state. IEEE Trans. Ind. Electron. 2002, 49, 370–381. [Google Scholar] [CrossRef]
- Delorme, L.; Ayala, M.; Rodas, J.; Gregor, R.; Gonzalez, O.; Doval-Gandoy, J. Comparison of the Effects on Stator Currents Between Continuous Model and Discrete Model of the Three-phase Induction Motor in the Presence of Electrical Parameter Variations. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 151–156. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Nominal power | VA | ||
| Supply voltage | 380 | V | |
| Nominal frequency | f | 50 | Hz |
| Stator resistance | |||
| Rotor resistance | |||
| Stator loss inductance | mH | ||
| Rotor loss inductance | mH | ||
| Magnetising inductance | 430 | mH | |
| Friction coefficient | B | Nm· s | |
| Moment of inertia | J | kg· m | |
| Pole pairs | P | 2 |
| Gain | Values | RMSE (A) |
|---|---|---|
| 1 | ||
| 100 | ||
| 100 | ||
| Gain | Value | RMSE (A) |
|---|---|---|
| 1 | ||
| 100 | ||
| 100 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maidana, P.; Medina, C.; Rodas, J.; Maqueda, E.; Gregor, R.; Wheeler, P. Sliding-Mode Current Control with Exponential Reaching Law for a Three-Phase Induction Machine Fed by a Direct Matrix Converter. Energies 2022, 15, 8379. https://doi.org/10.3390/en15228379
Maidana P, Medina C, Rodas J, Maqueda E, Gregor R, Wheeler P. Sliding-Mode Current Control with Exponential Reaching Law for a Three-Phase Induction Machine Fed by a Direct Matrix Converter. Energies. 2022; 15(22):8379. https://doi.org/10.3390/en15228379
Chicago/Turabian StyleMaidana, Paola, Christian Medina, Jorge Rodas, Edgar Maqueda, Raúl Gregor, and Pat Wheeler. 2022. "Sliding-Mode Current Control with Exponential Reaching Law for a Three-Phase Induction Machine Fed by a Direct Matrix Converter" Energies 15, no. 22: 8379. https://doi.org/10.3390/en15228379
APA StyleMaidana, P., Medina, C., Rodas, J., Maqueda, E., Gregor, R., & Wheeler, P. (2022). Sliding-Mode Current Control with Exponential Reaching Law for a Three-Phase Induction Machine Fed by a Direct Matrix Converter. Energies, 15(22), 8379. https://doi.org/10.3390/en15228379