
Cold Load Pickup Model Adequacy for Power System Restoration Studies


Abstract
:1. Introduction
- To provide parameter fits of CLPU models for additional disturbance events beyond those 10 published in [8], now totalling 31 events;
- To provide parameter fits based on actual measurements of a real load composition to the delayed exponential decay model of CLPU according to [13], where it was analytically derived for space heating only;
- To determine the degree to which the load profile, caused by CLPU, can be adequately represented using simplified models and to quantify the impact of these simplifications on simulation results with respect to frequency nadir and active power sharing in the use case demonstrated in [12] with a grid structure similar to [14,15].
2. Cold Load Pickup Models
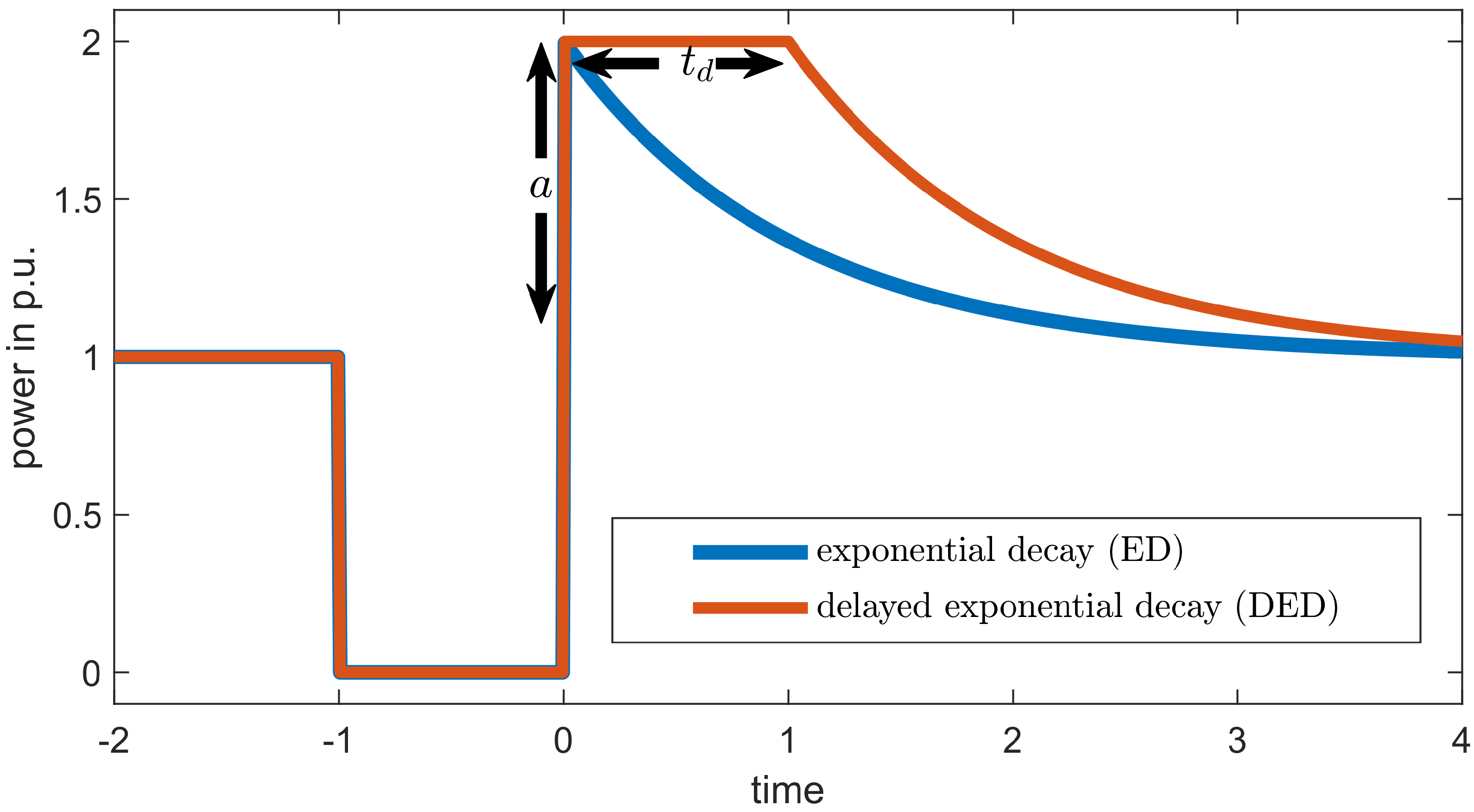
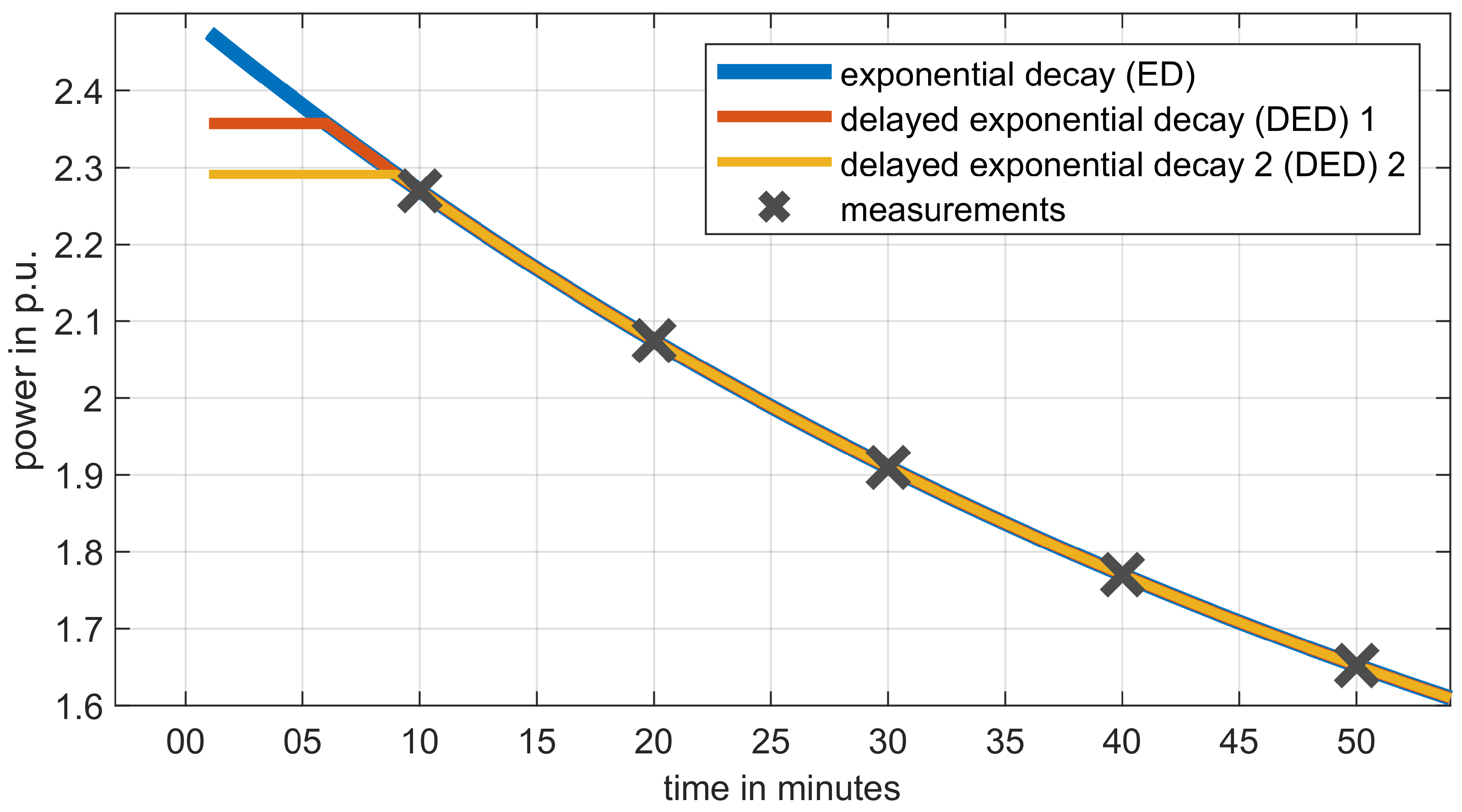
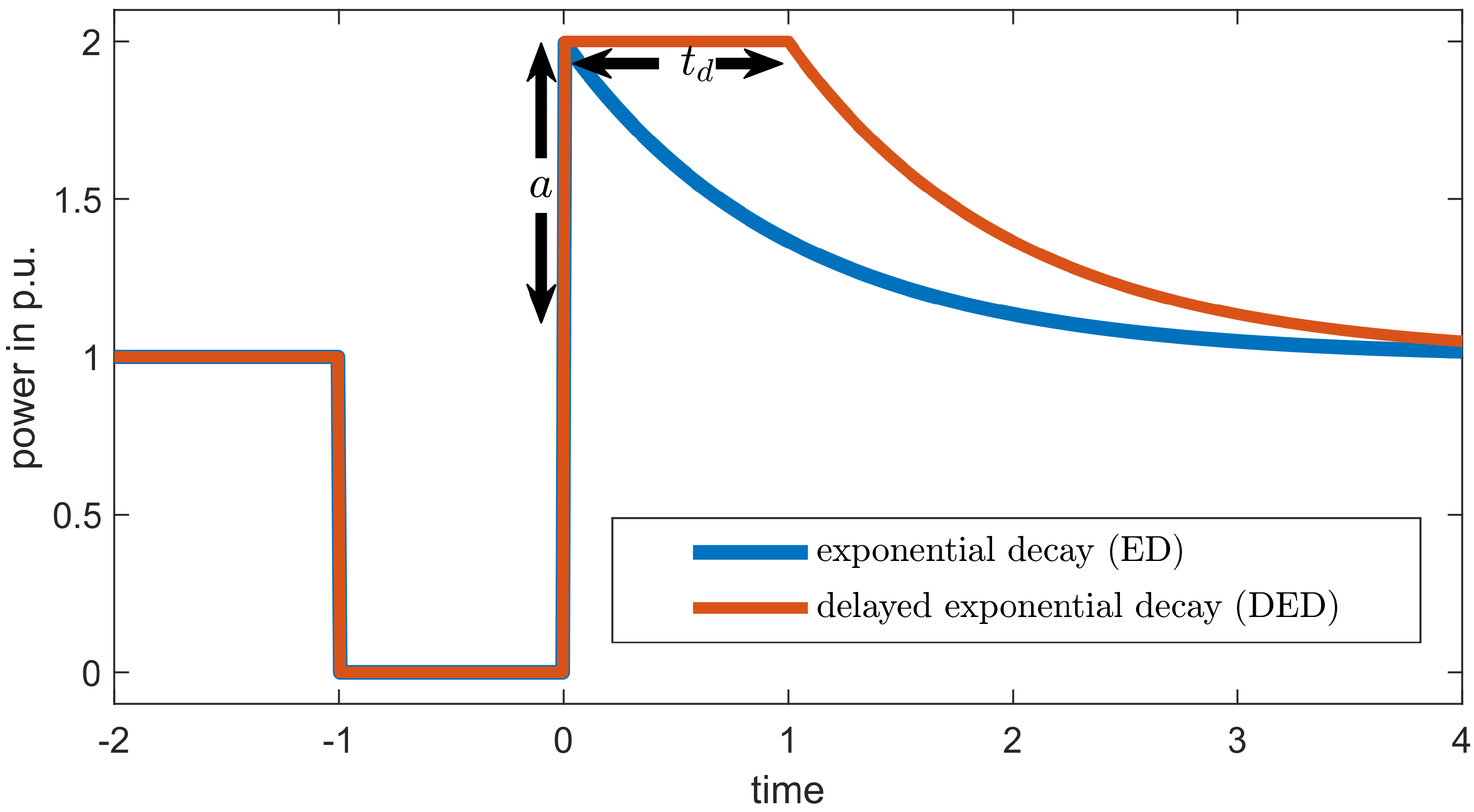
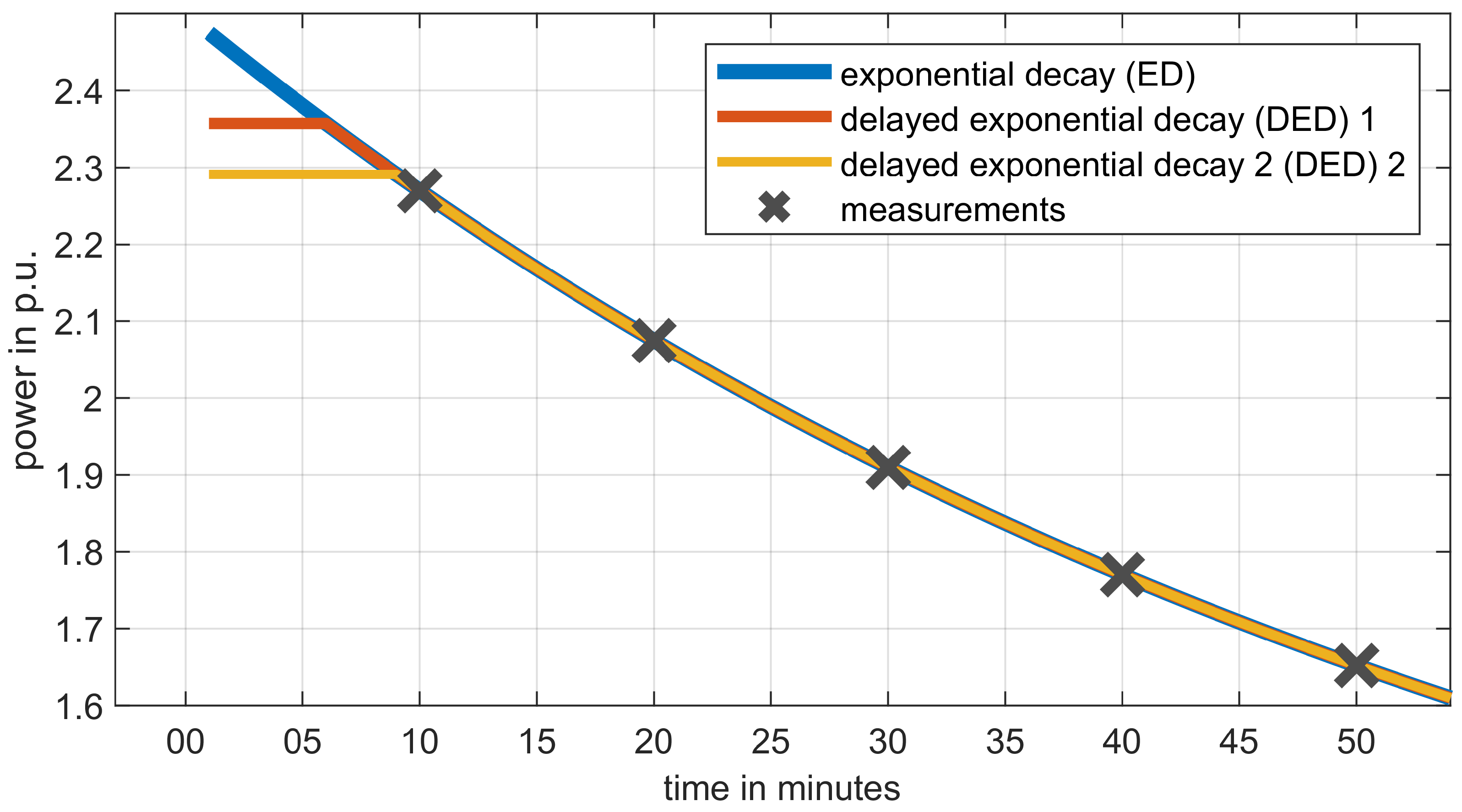
2.1. Exponential Decay Models
2.2. Other Models
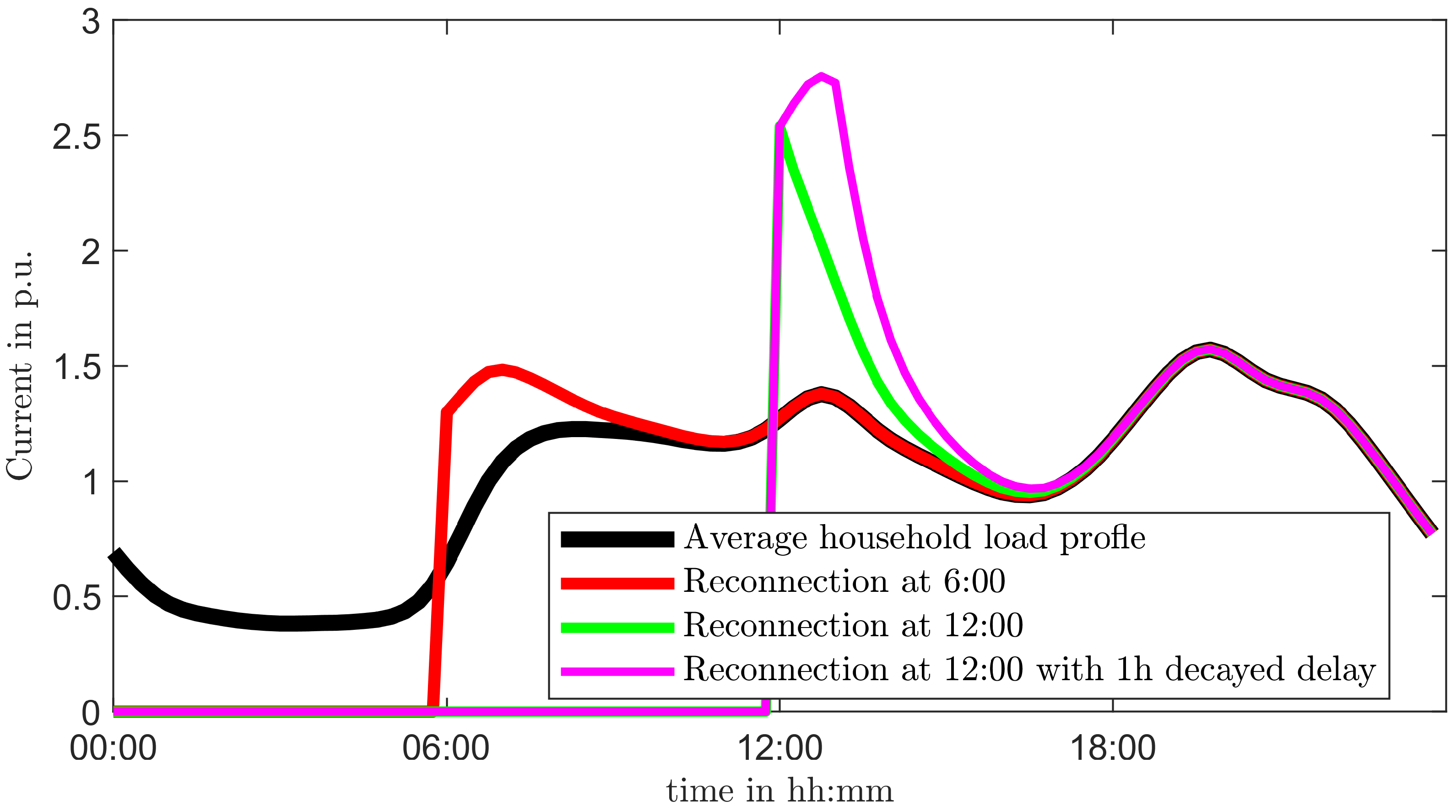
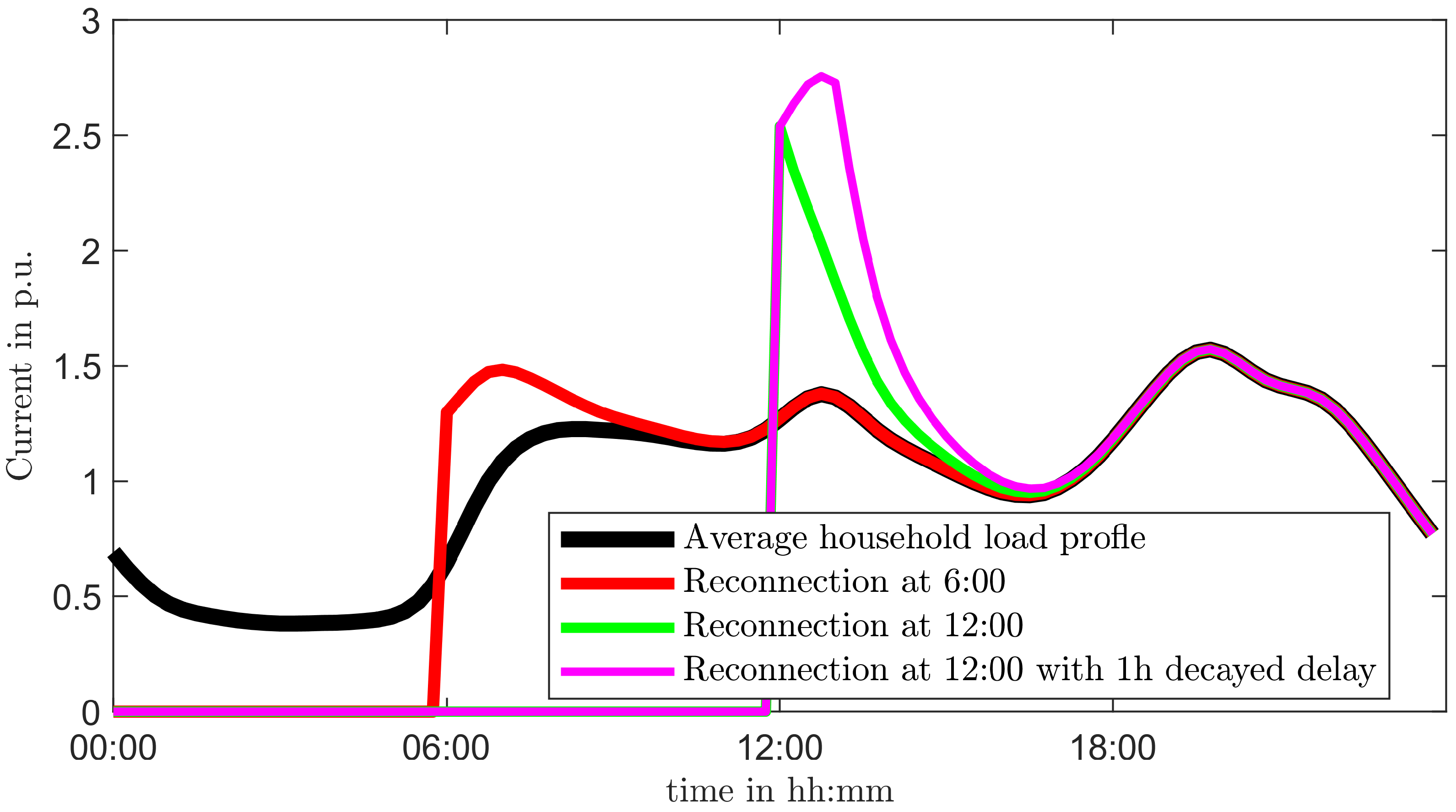
2.3. Interaction of CLPU with Time Variable Demand
3. Measurement Data
- Outage duration at least 5 min;
- Reconnection after the outage occurred with (nearly) the same switching status as before the disturbance;
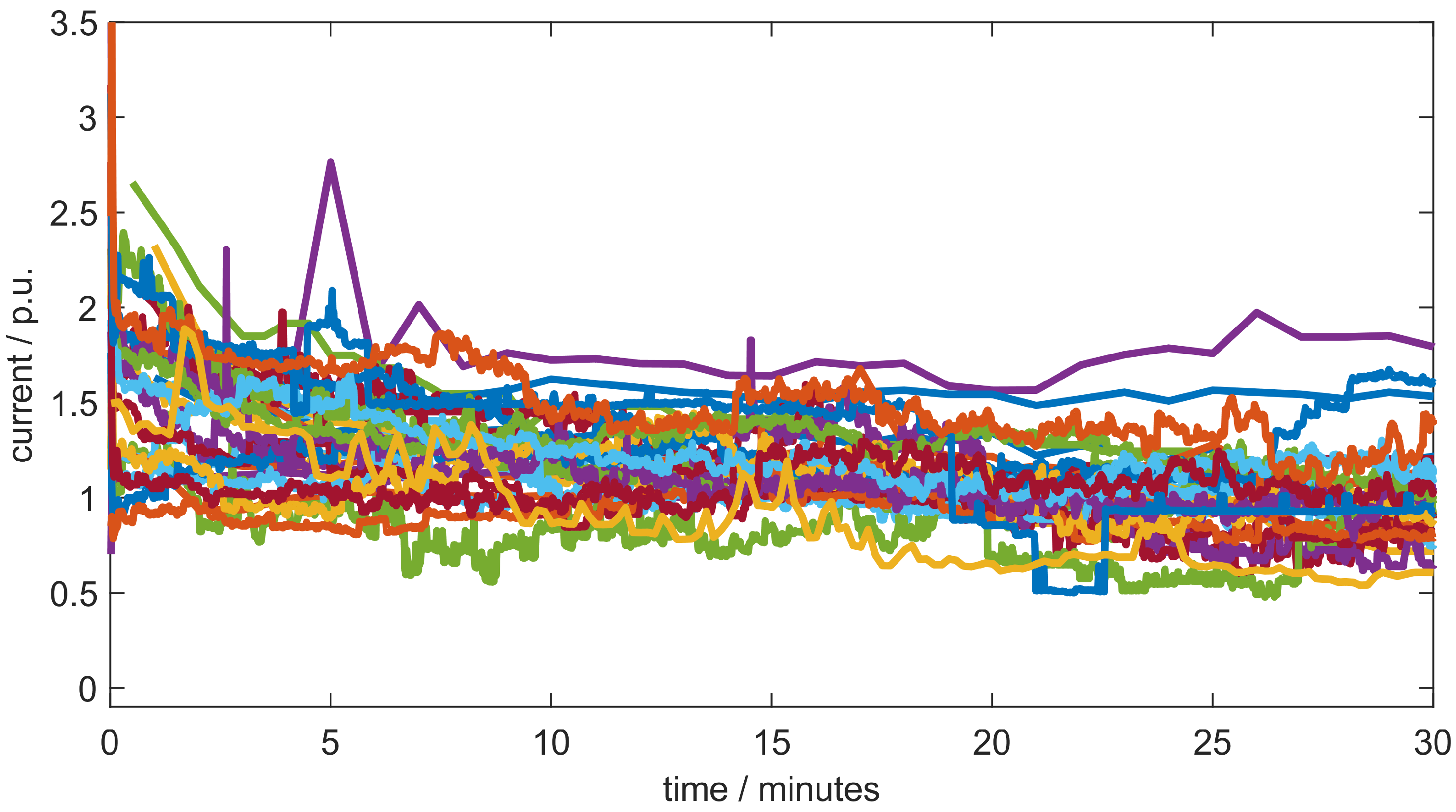
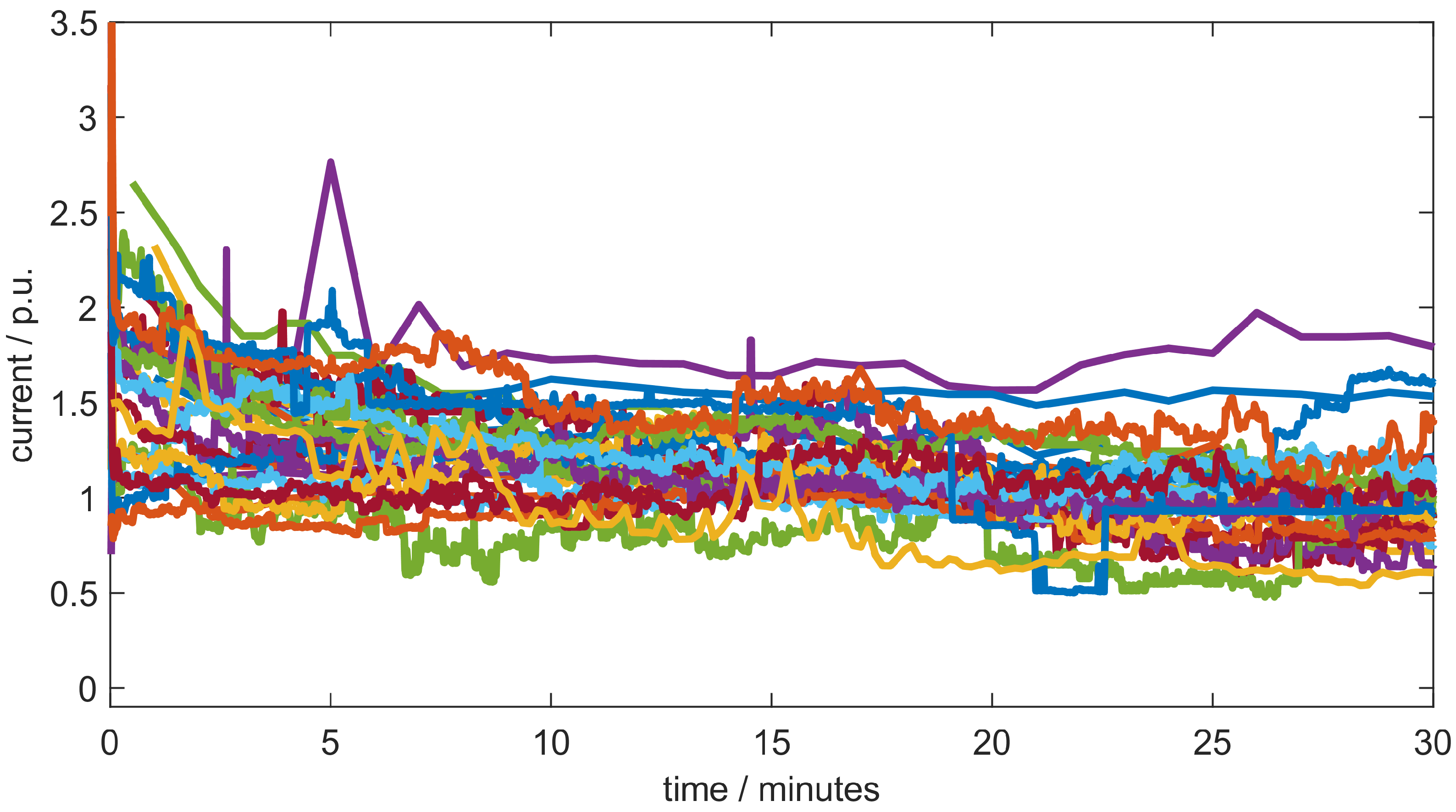
- Measurements are available for at least 30 min, requiring an unchanged switching status after reconnection;
- The time resolution of the measurements is at least 1 measurement per minute.
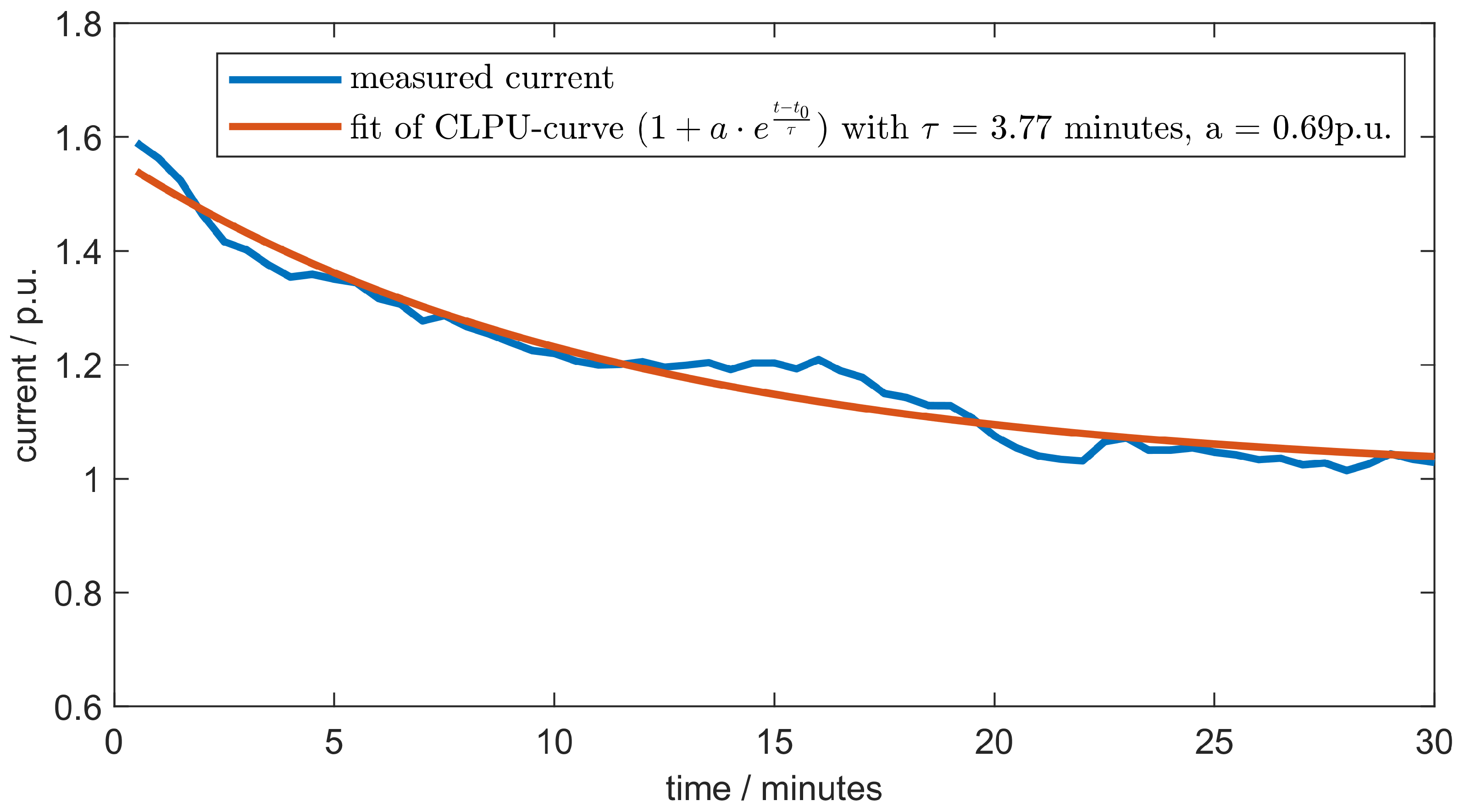
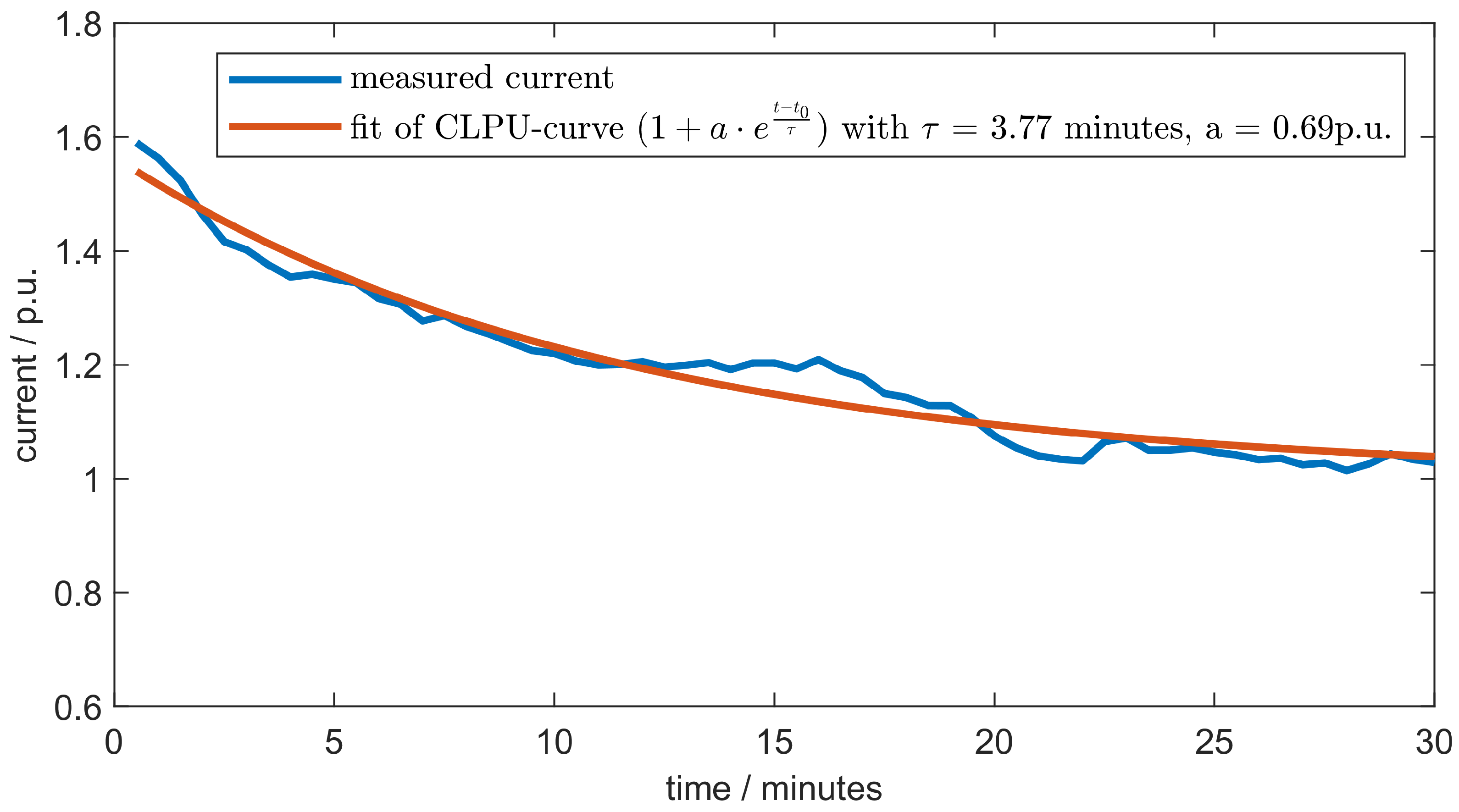
4. Parameter Determination
4.1. Under-Determined Parameter Fit
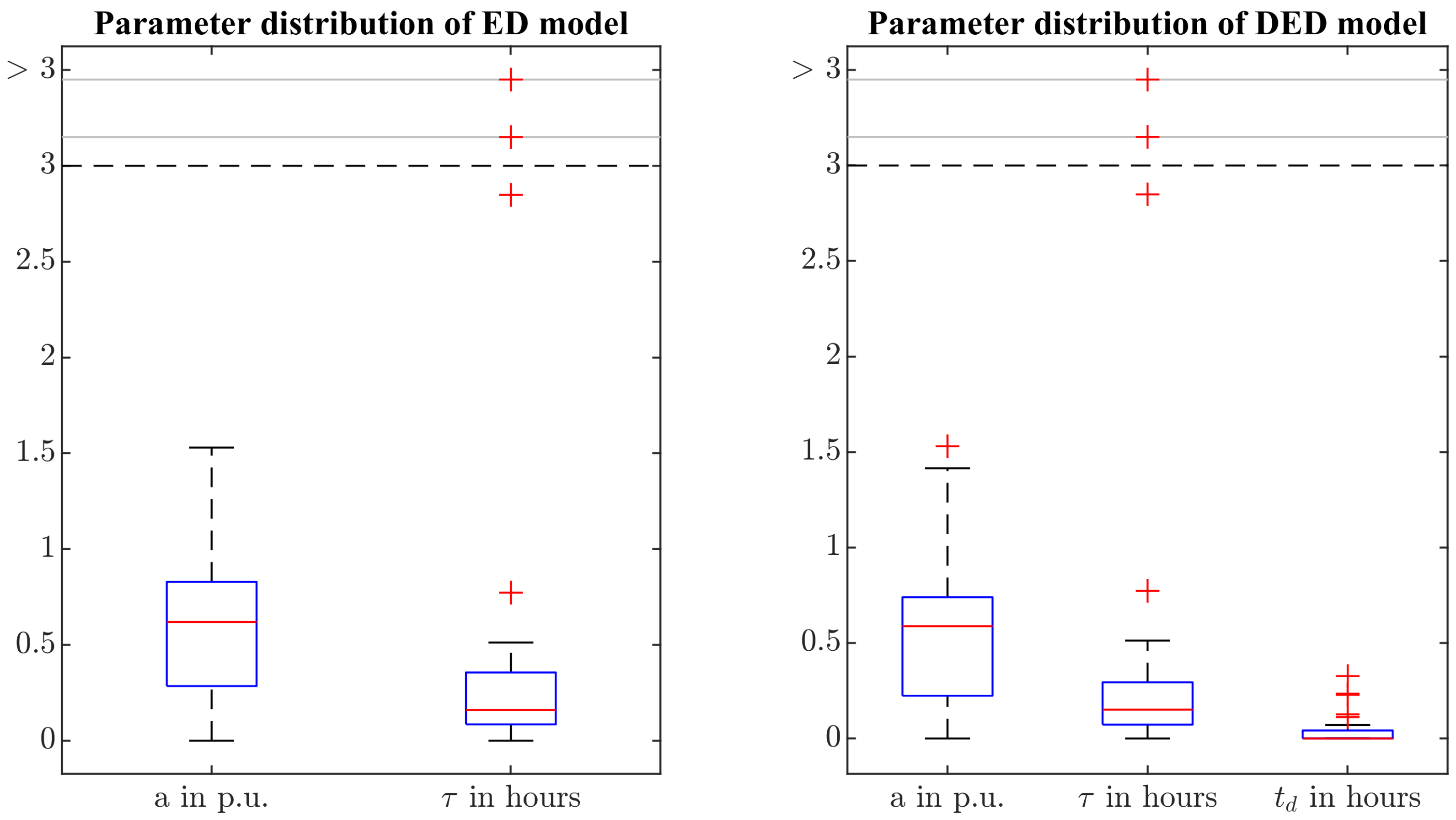
4.2. Distribution of Parameters
4.3. Correlation of Outage Duration and Parameters
5. Simulation Model for Restoration Study
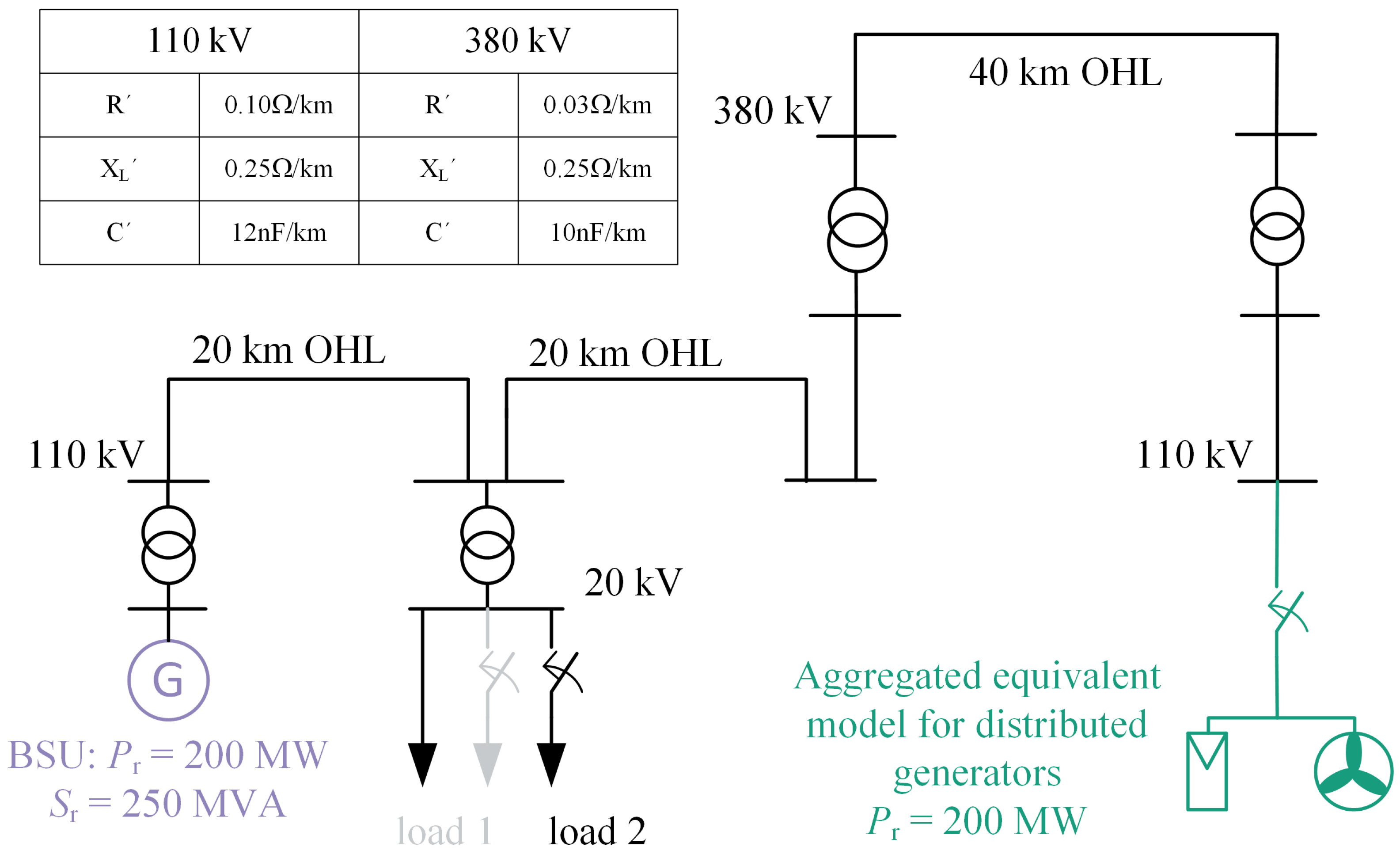
- Operation of a small island system energized by a blackstart capable gas turbine power plant (blackstart unit, BSU) with a directly coupled synchronous generator and significant renewable generation behaving according to current German grid connection standards for inverter coupled units;
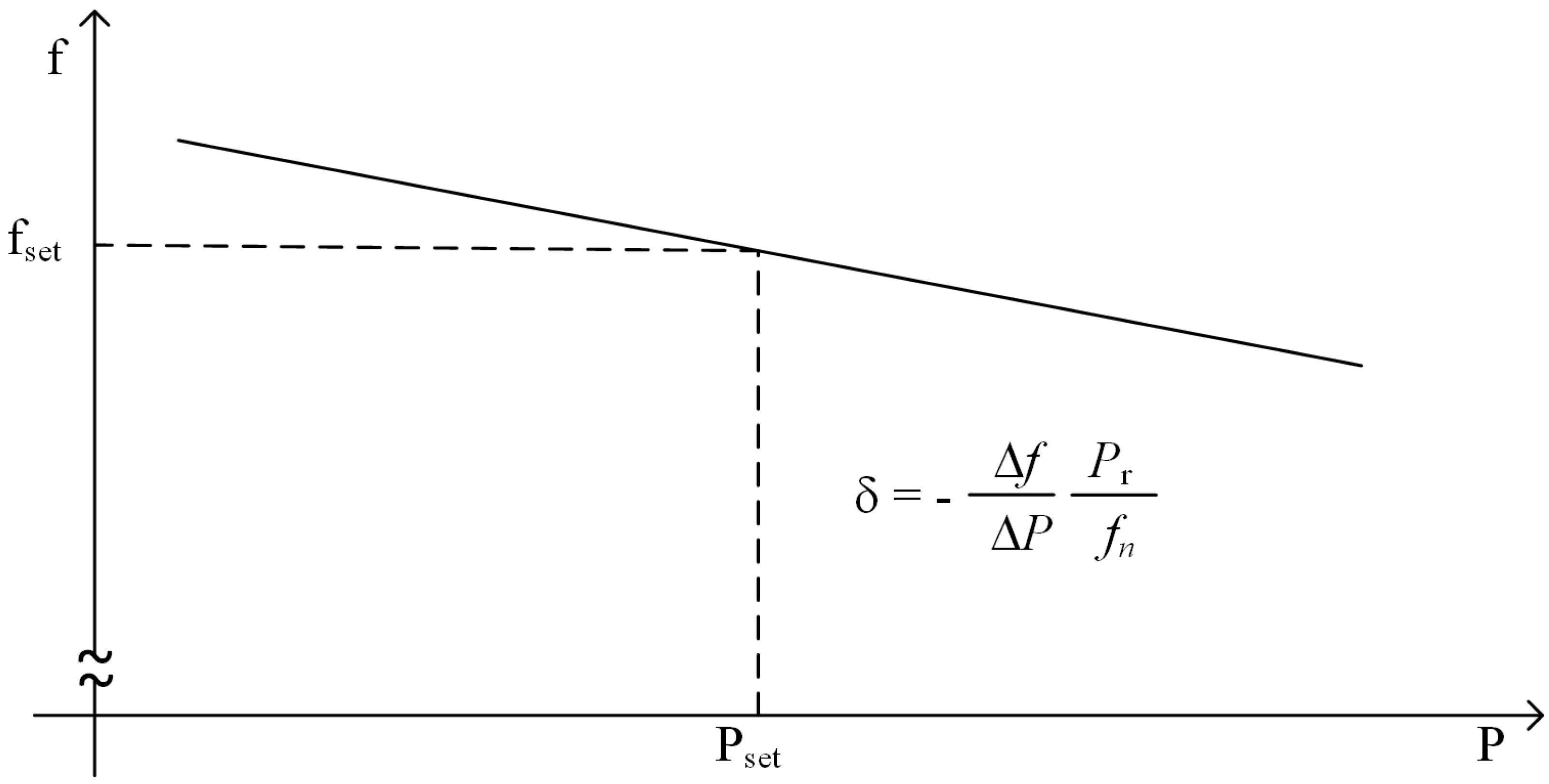
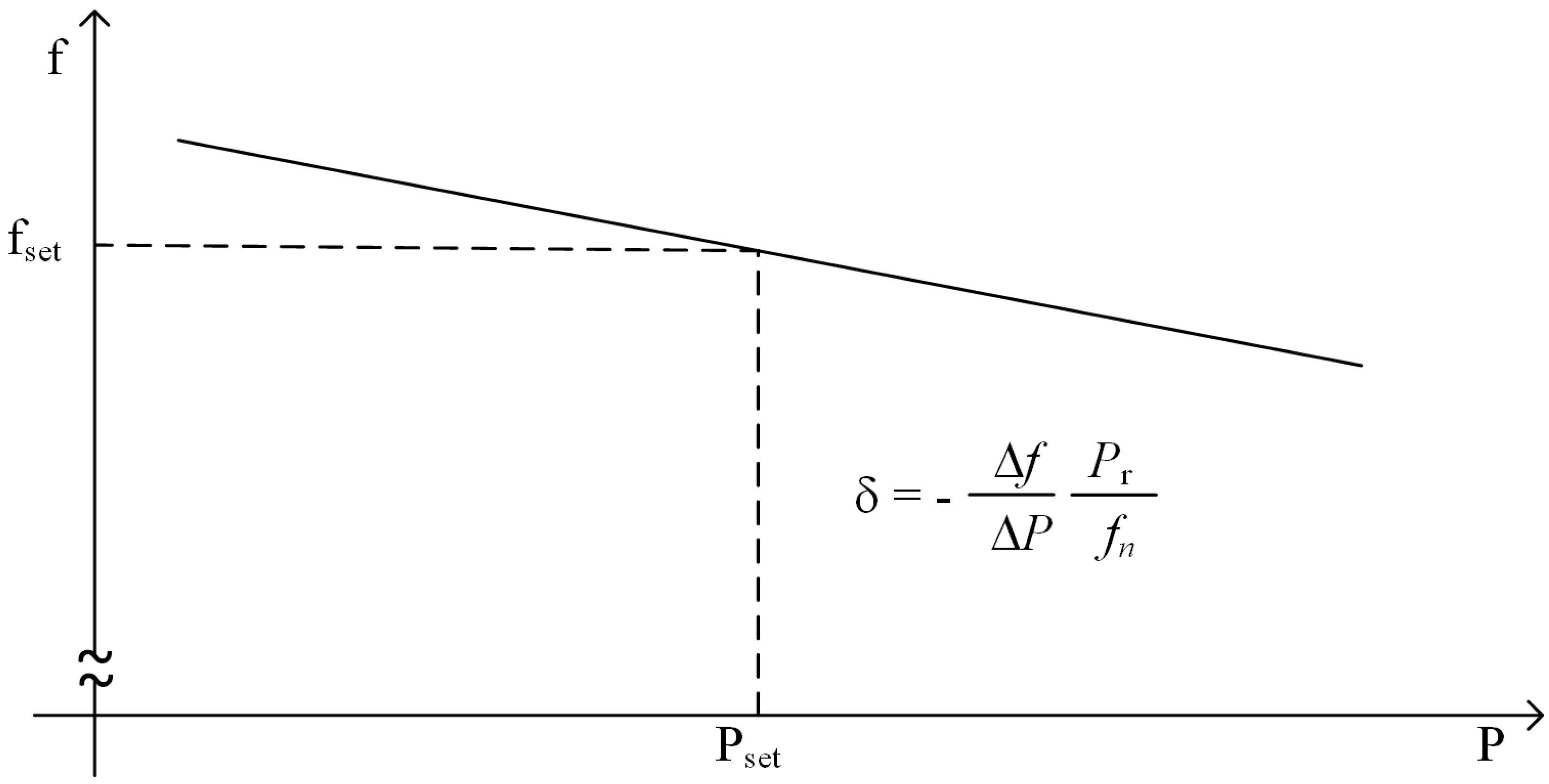
- Active power sharing among generators based on the -characteristics of the generators;
- Reconnection of unsupplied grid areas subject to CLPU.
5.1. System Model
5.2. Gas Turbine Power Plant Model
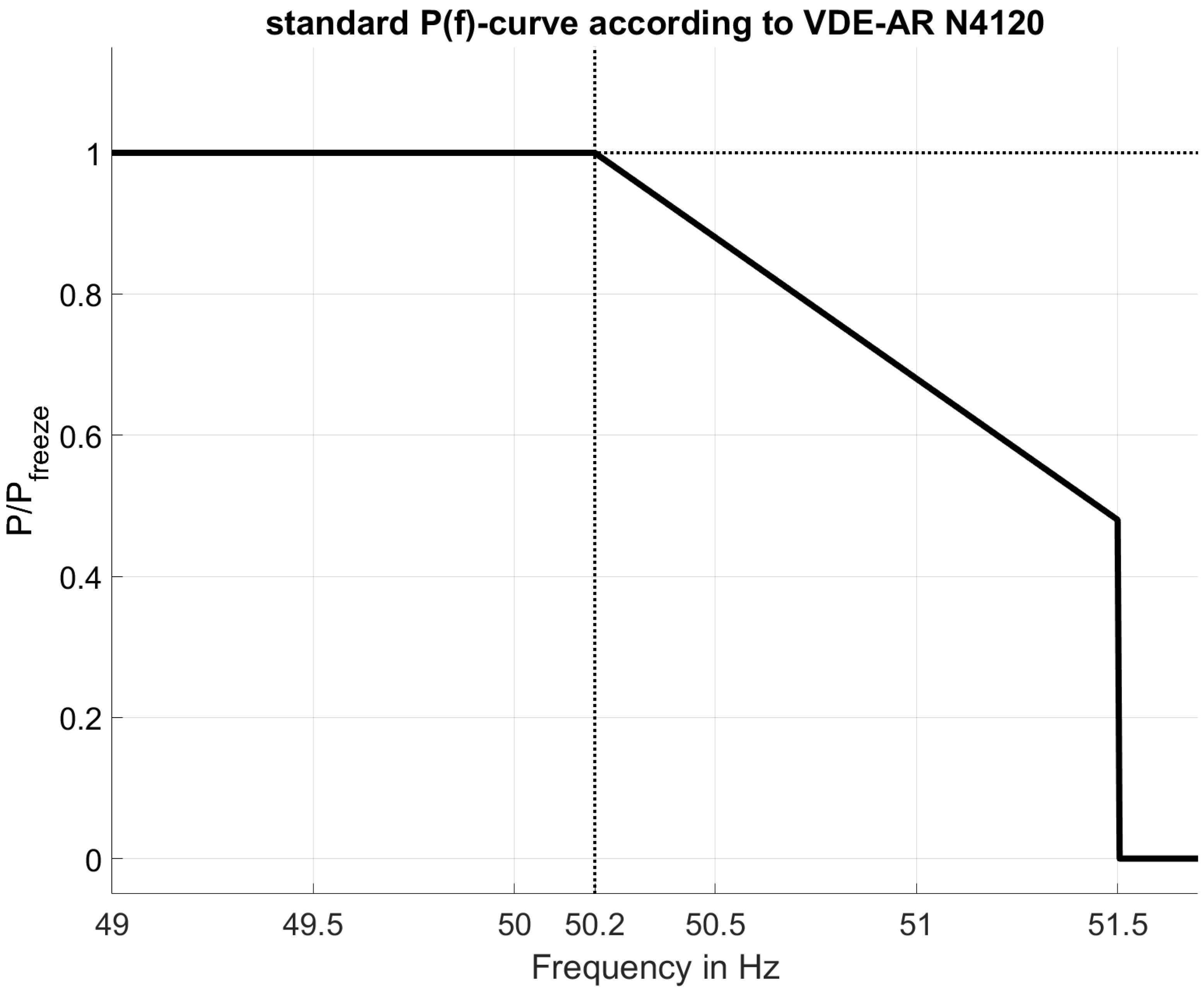
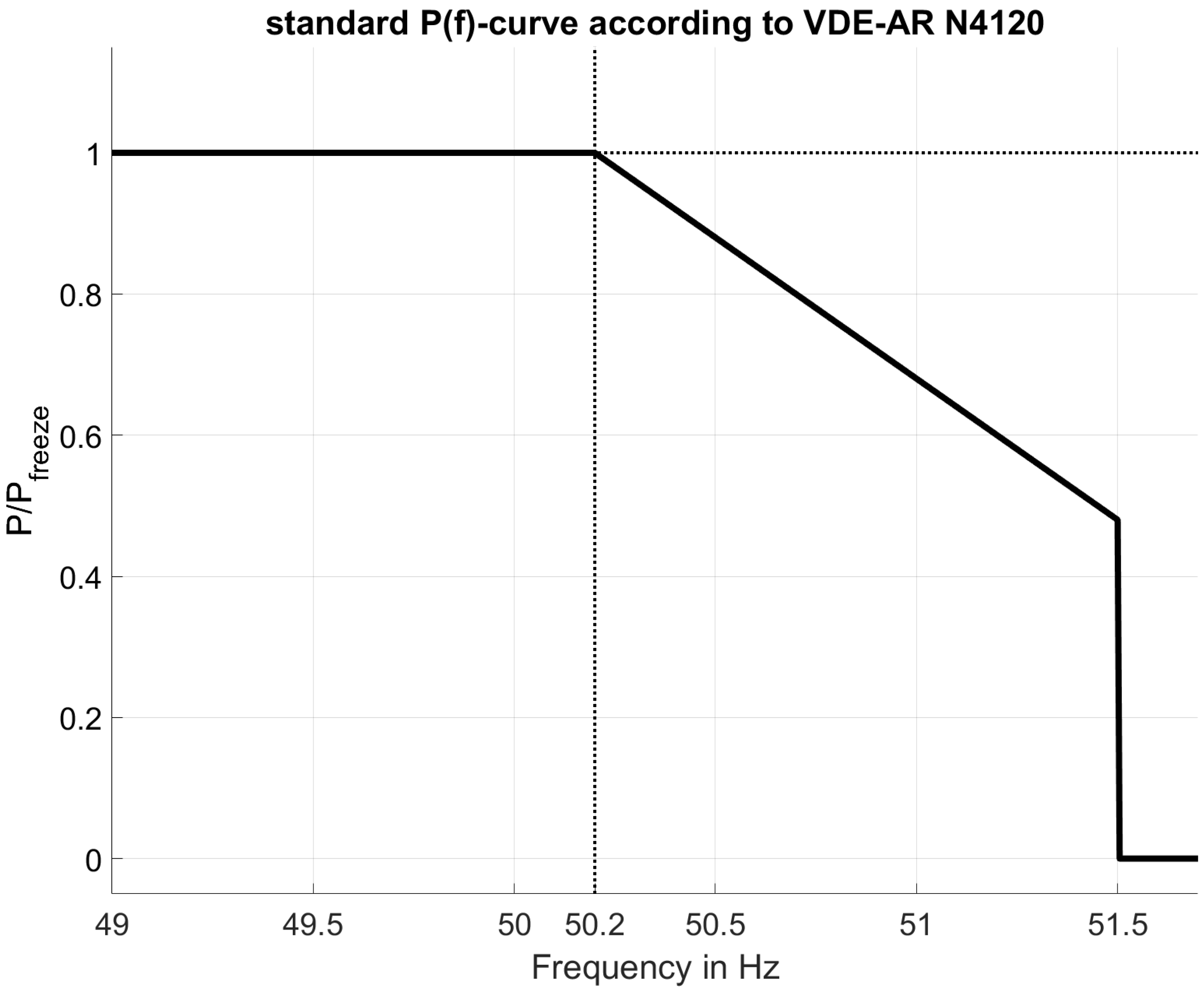
5.3. Renewable Generation Model
5.4. Load Model
6. Simulation Case Study
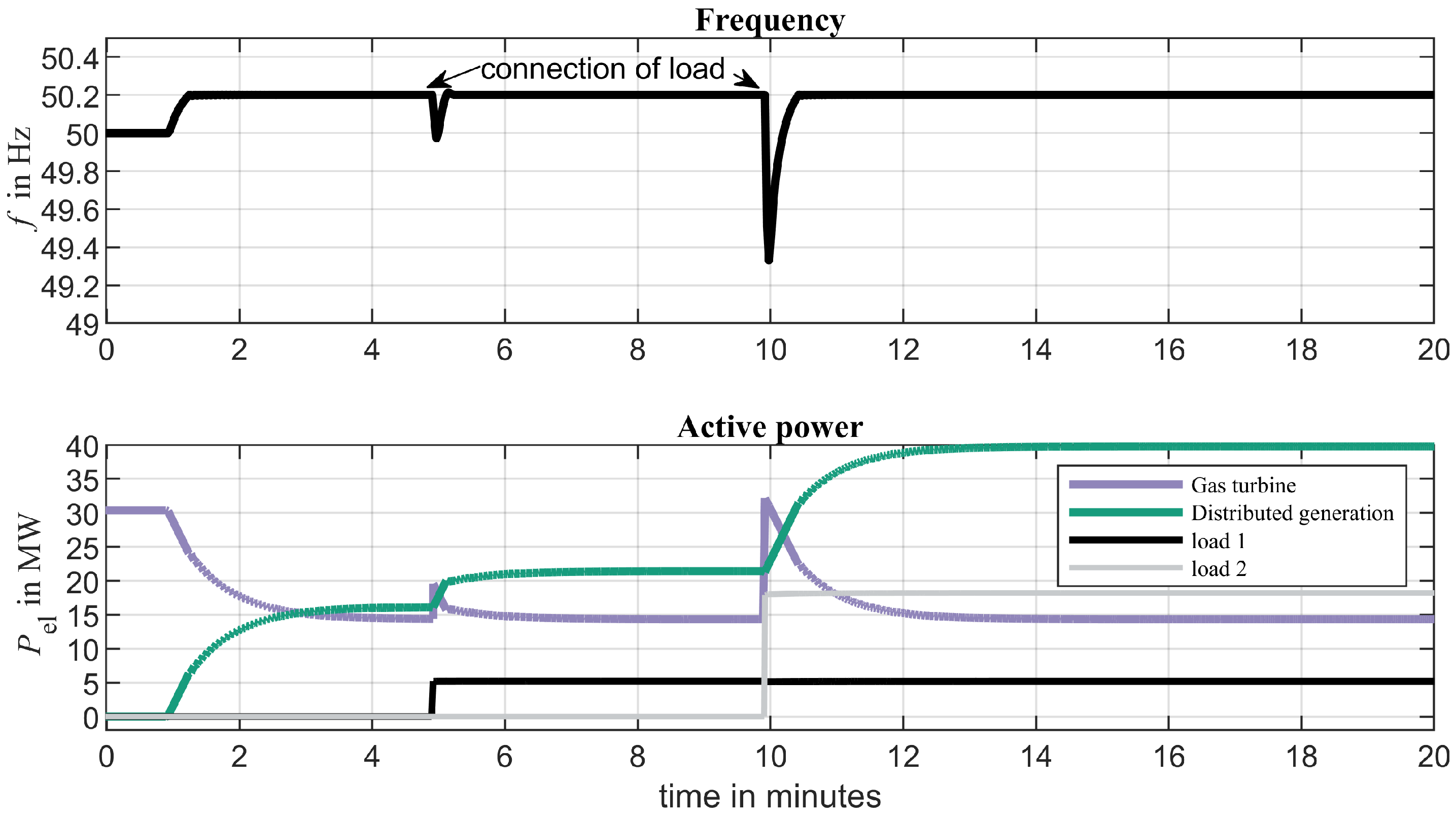
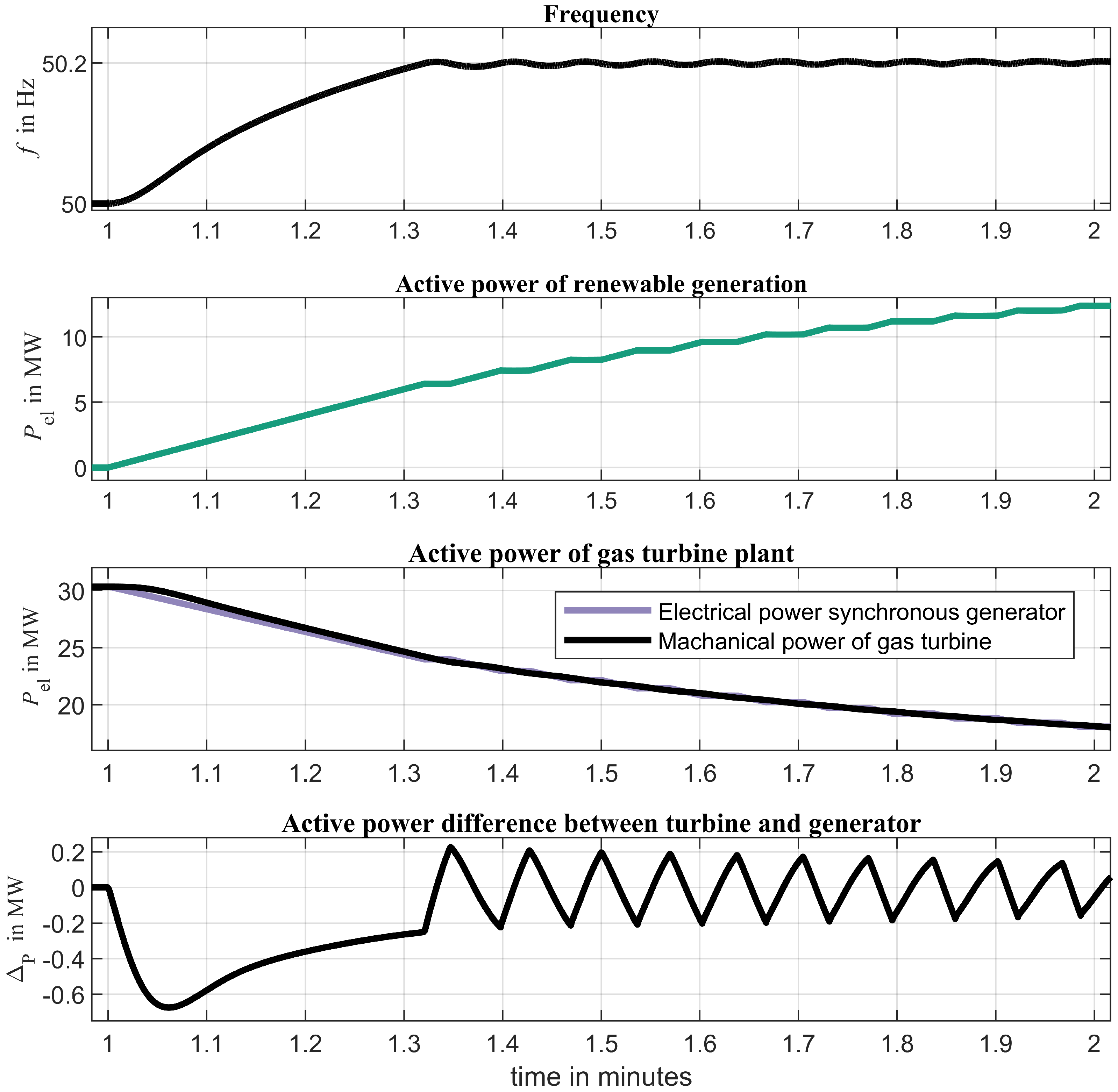
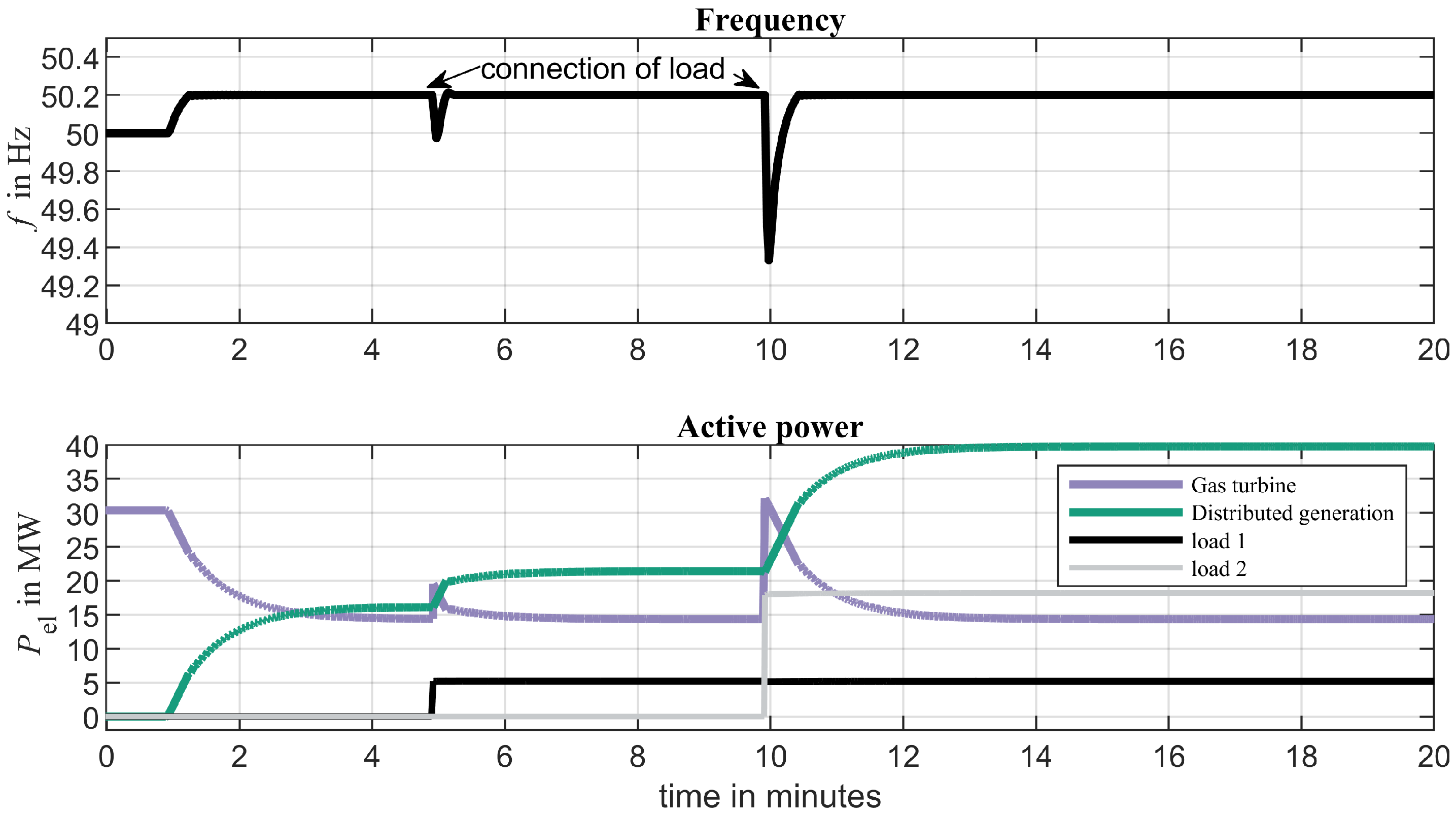
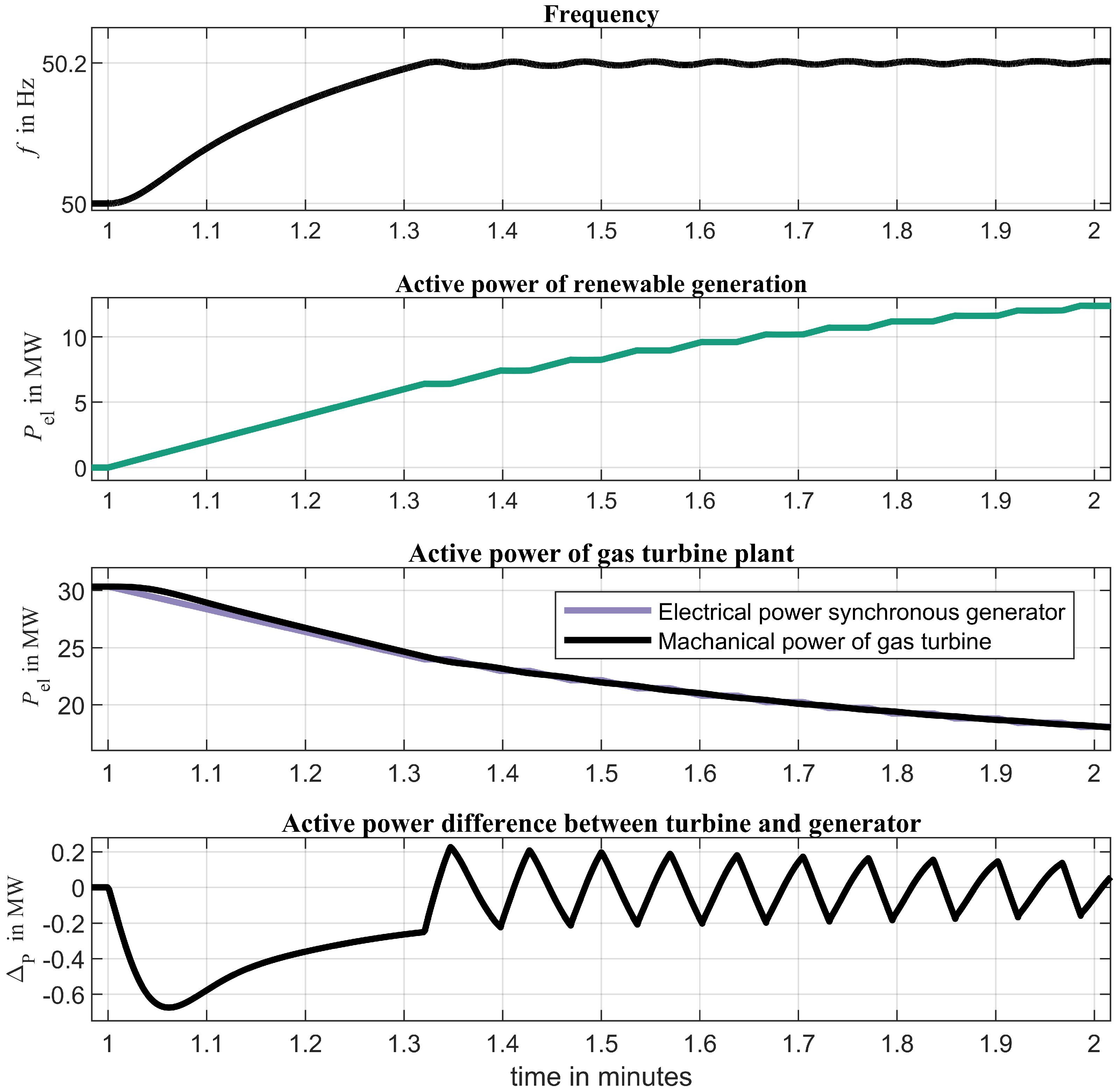
6.1. Base Case without Any CLPU
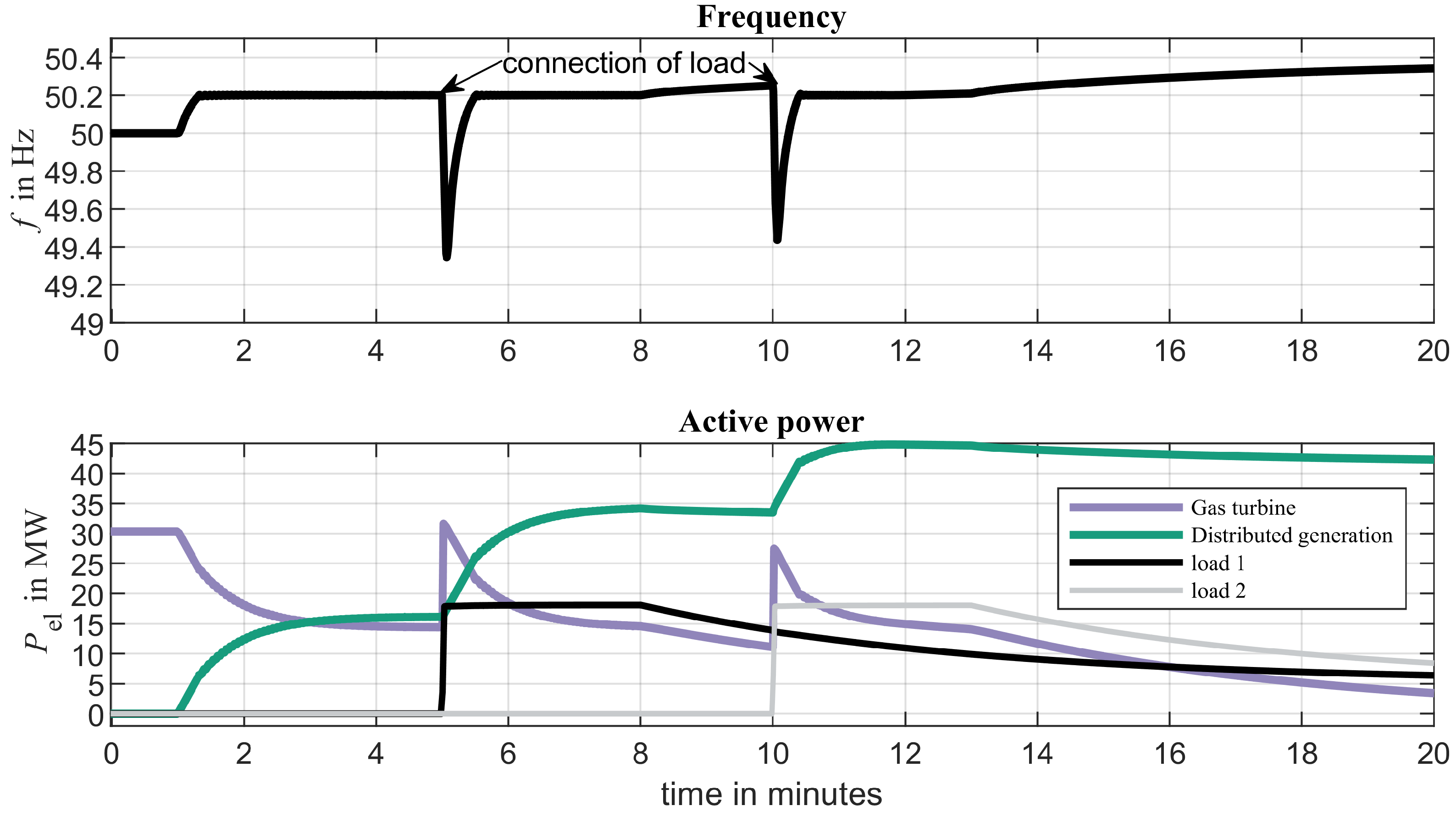
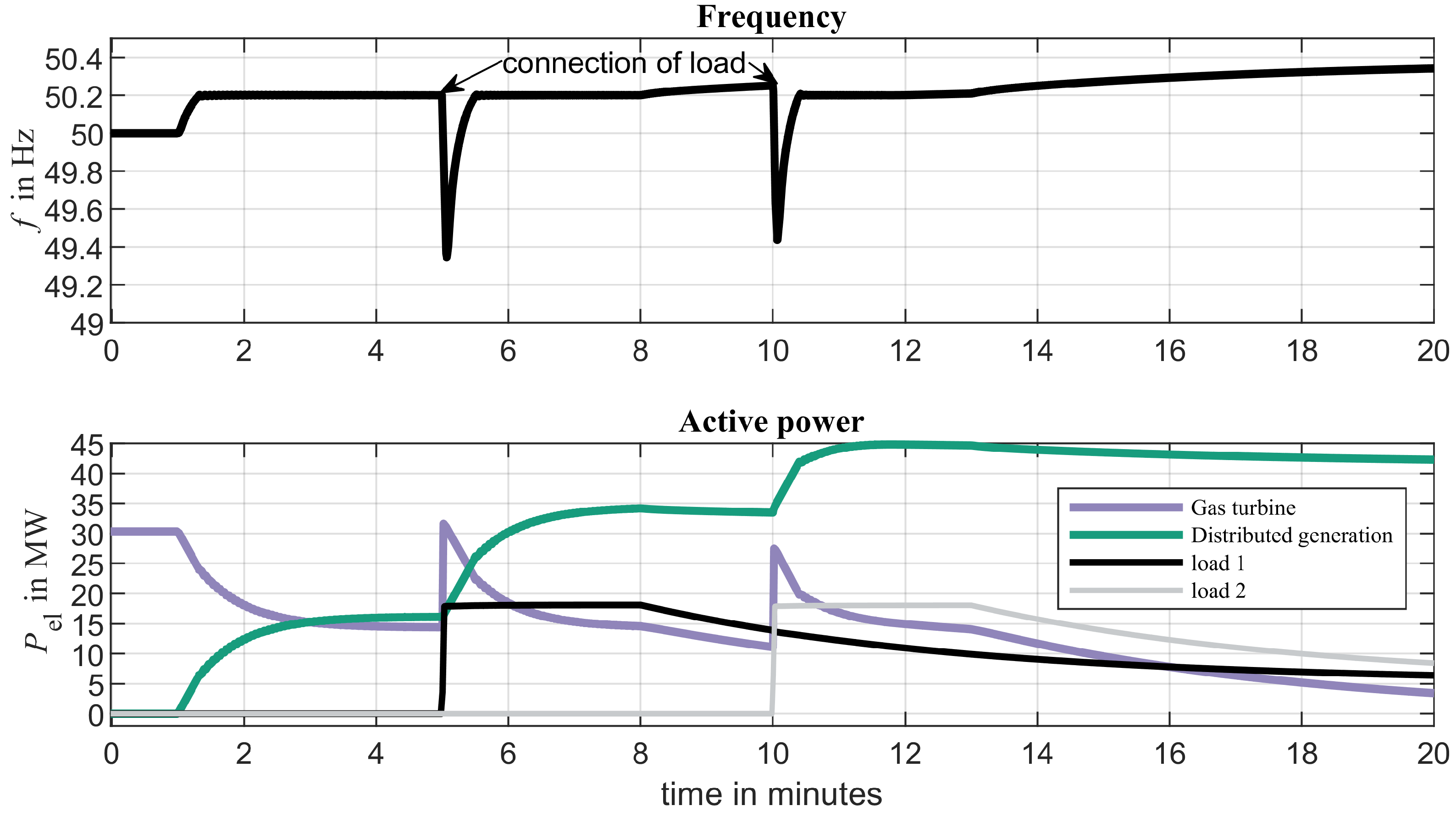
6.2. Comparison Case with CLPU
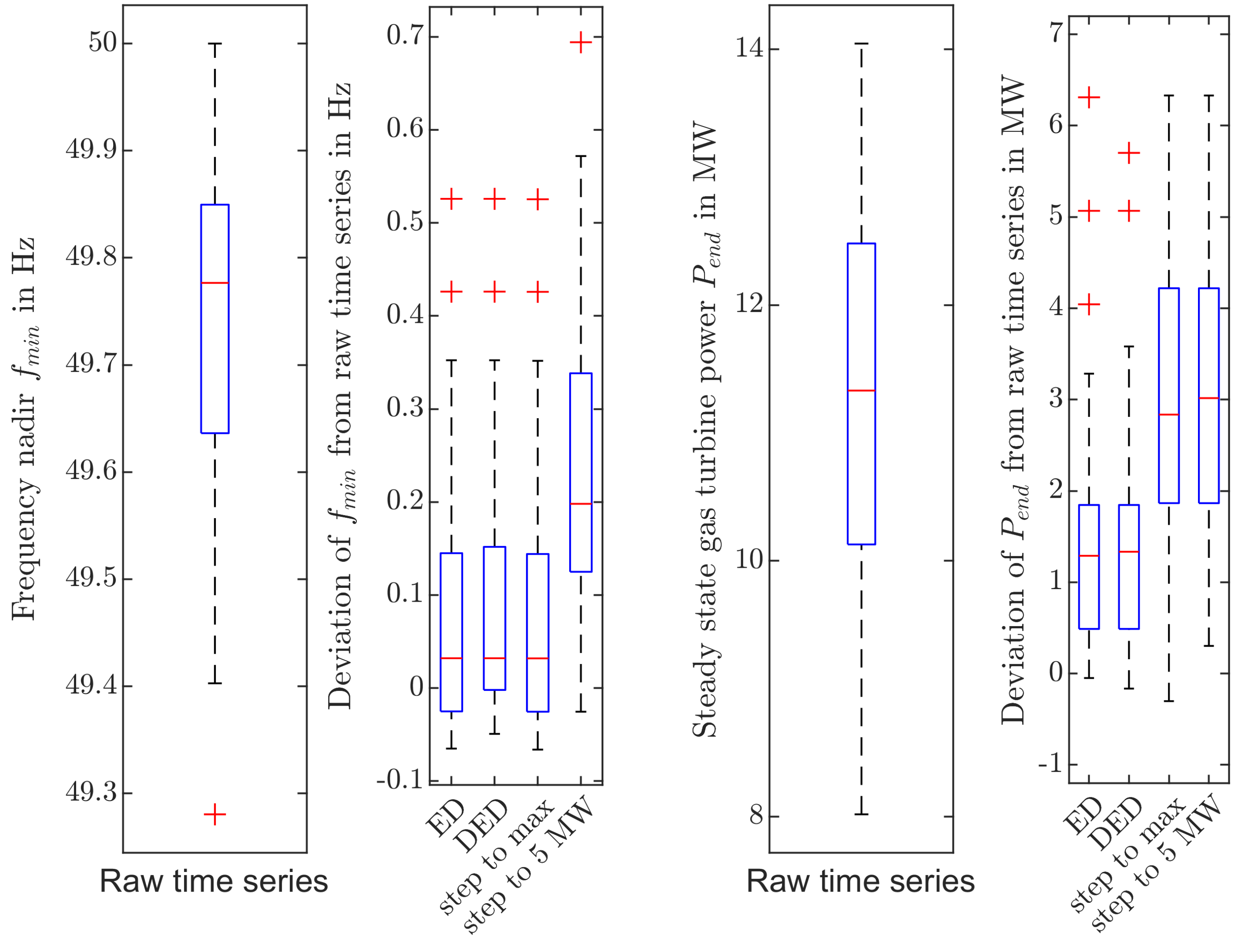
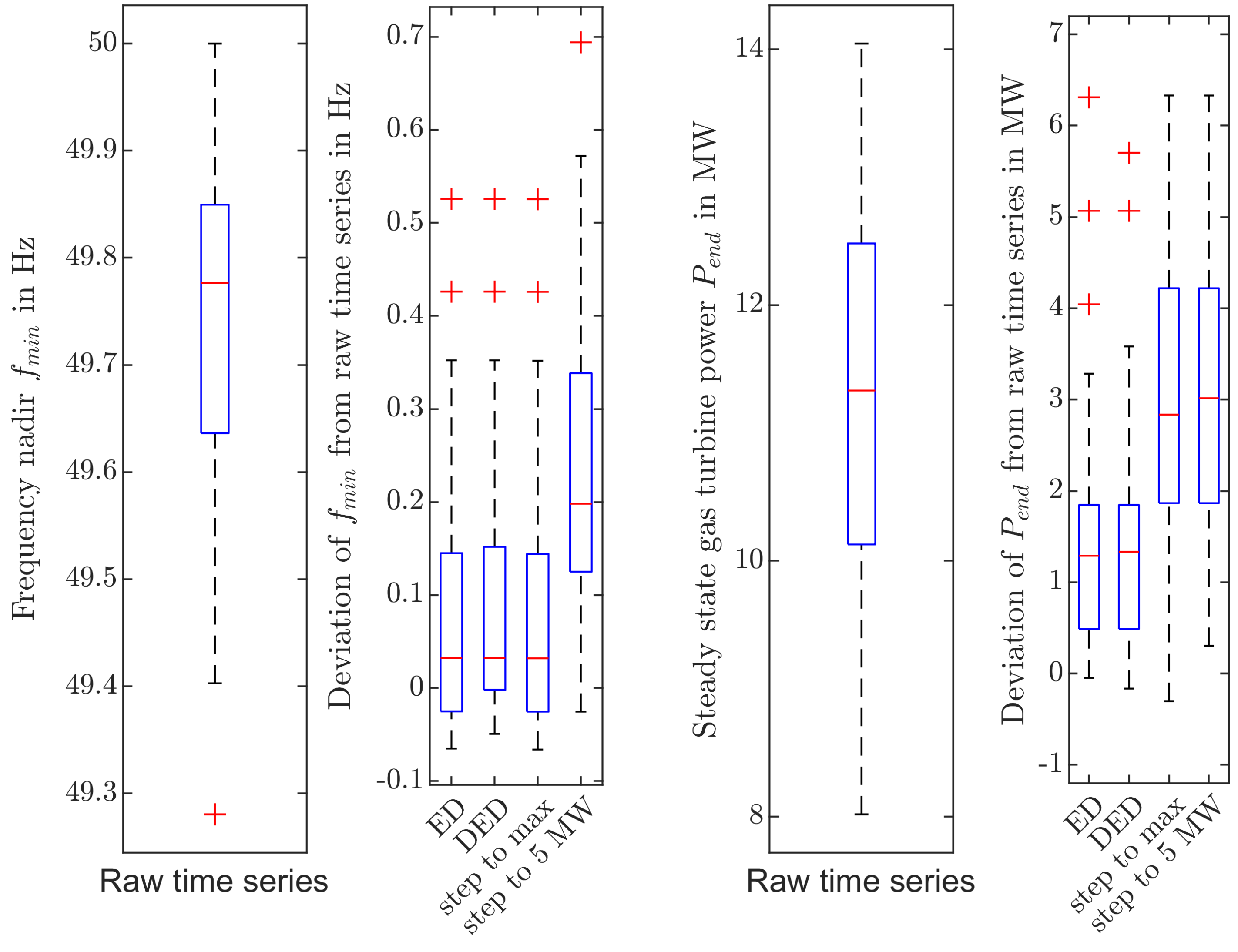
6.3. Sensitivity Study: Variation of CLPU Modelling and Parameters
- Application of recorded current time series;
- Exponential decay (ED) model;
- Delayed exponential decay (DED) model;
- Active power step to the expected initial load;
- Active power step directly to the expected steady-state load value.
- The frequency nadir should safely remain above the relevant threshold, which is (in the European case) 49 Hz if under frequency load shedding is to be avoided and 47.5 Hz if only the disconnection of generators and subsequent network collapse is of concern.
- The steady-state frequency indicates how much CLPU influences the steady state of the power system. In the case without CLPU, it is very close to 50.2 Hz.
- The steady-state power of the synchronous generator is relevant for stable operation of the gas turbine power plant. Without CLPU, at the chosen initial operating point of the plant, it is always above 14.3 MW. Uncertainty of CLPU behaviour creates an additional need to operate the plant at a higher initial power and thus further away from critical minimum load.
7. Discussion and Outlook
Regulatory Approaches to Reduce CLPU
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AVR | Automatik Voltage Regulator |
| BSU | Blackstart Unit |
| CLPU | Cold Load Pickup |
| ED | Exponential Decay |
| DED | Delayed Exponential Decay |
| OHL | Overhead Line |
| PLL | Phase-Locked Loop |
| PV | Photovoltaic |
| RMS | Root Mean Square |
| RMSE | Root Mean Square Error |
References
- McDonald, J.E.; Bruning, A.M. Cold Load Pickup. IEEE Trans. Power Appar. Syst. 1979, PAS-98, 1384–1386. [Google Scholar] [CrossRef]
- Friend, F. Cold load pickup issues. In Proceedings of the 2009 62nd Annual Conference for Protective Relay Engineers, College Station, TX, USA, 30 March–2 April 2009; pp. 176–187. [Google Scholar] [CrossRef]
- Kumar, I.B.; Singh, R. Measurement of Cold Load Pickup—A Case Study. IJSRD Int. J. Sci. Res. Dev. 2015, 3, 2454–2456. [Google Scholar]
- Gonzalez, M.; Wheeler, K.A.; Faried, S.O. An Overview of Cold Load Pickup Modeling for Distribution System Planning. In Proceedings of the 2021 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 22–31 October 2021; pp. 328–333. [Google Scholar] [CrossRef]
- IEEE Restoration Dynamics Task Force. Power System Restoration Dynamics (Issues, Techniques, Planning, Training & Special Considerations), Technical Report, PES-TPC2. 2014. Available online: https://resourcecenter.ieee-pes.org/publications/technical-reports/PESTPC2.html (accessed on 28 September 2015).
- Agneholm, E. Cold Load Pick-Up. Ph.D. Dissertation, Department of Electric Power Engineering, Chalmers University of Technology, Goeteborg, Sweden, 1999. [Google Scholar]
- Raoofsheibani, D.; Hinkel, P.; Ostermann, M.; Wellssow, W.H.; Nemati, M.; Neisius, H.T. Optimal restoration of distribution systems with active participation of volatile renewable generators. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar]
- Hachmann, C.; Lammert, G.; Hamann, L.; Braun, M. Cold load pickup model parameters based on measurements in distribution systems. IET Gener. Transm. Distrib. 2019, 13, 5387–5395. [Google Scholar] [CrossRef]
- Braun, M.; Brombach, J.; Hachmann, C.; Lafferte, D.; Klingmann, A.; Heckmann, W.; Welck, F.; Lohmeier, D.; Becker, H. The Future of Power System Restoration: Using Distributed Energy Resources as a Force to Get Back Online. IEEE Power Energy Mag. 2018, 16, 30–41. [Google Scholar] [CrossRef]
- Papasani, A.; Zia, K.; Lee, W.J. Automatic Power System Restoration With Inrush Current Estimation for Industrial Facility. IEEE Trans. Ind. Appl. 2021, 57, 5772–5781. [Google Scholar] [CrossRef]
- Ospina, L.D.P.; Correa, A.F.; Lammert, G. Implementation and validation of the Nordic test system in DIgSILENT PowerFactory. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Hachmann, C.; Becker, H.; Theimer, F.; Thiel, P.; Braun, M. Local Power System Restoration and Islanded Operation with Combined Heat and Power Plants and Integration of Wind Power. In Proceedings of the ETG Congress 2021, Online, 18–19 March 2021; pp. 1–6. [Google Scholar]
- Lang, W.W.; Anderson, M.D.; Fannin, D.R. An Analytical Method for Quantifying the Electrical Space Heating Component of a Cold Load Pickup. IEEE Power Eng. Rev. 1981, ER-2, 38. [Google Scholar] [CrossRef]
- Benato, R.; Dambone Sessa, S.; Sanniti, F. Lessons Learnt from Modelling and Simulating the Bottom-Up Power System Restoration Processes. Energies 2022, 15, 4145. [Google Scholar] [CrossRef]
- Becker, H.; Schütt, J.; Schürmann, G.; Spanel, U.; Holicki, L.; Malekian, K. Opportunities to support the restoration of electrical grids with little numbers of large power plants through converter-connected generation and storages. IET Renew. Power Gener. 2022, 1–11. [Google Scholar] [CrossRef]
- Rodriguez Medina, D.; Rappold, E.; Sanchez, O.; Luo, X.; Rivera Rodriguez, S.R.; Wu, D.; Jiang, J.N. Fast Assessment of Frequency Response of Cold Load Pickup in Power System Restoration. IEEE Trans. Power Syst. 2016, 31, 3249–3256. [Google Scholar] [CrossRef]
- Hinkel, P.; Henschel, D.; Zugck, M.; Wellssow, W.; Torabi, E.; Guo, Y.; Rossa-Weber, G.; Gawlik, W.; Traxler, E.; Fiedler, L.; et al. Control Center Interfaces and Tools for Power System Restoration. In Proceedings of the International ETG-Congress 2019: ETG Symposium, Esslingen, Germany, 8–9 May 2019; pp. 1–6. [Google Scholar]
- Marchgraber, J.; Gawlik, W. Investigation of Black-Starting and Islanding Capabilities of a Battery Energy Storage System Supplying a Microgrid Consisting of Wind Turbines, Impedance- and Motor-Loads. Energies 2020, 13, 5170. [Google Scholar] [CrossRef]
- Agneholm, E.; Daalder, J. Cold load pick-up of residential load. IEE Proc. Gener. Transm. Distrib. 2000, 147, 44–50. [Google Scholar] [CrossRef]
- Raoofsheibani, D.; Hinkel, P.; Ostermann, M.; Roehrenbeck, S.; Wellssow, W.H. Residual load models for power system restoration: High shares of residential thermal loads and volatile PV generators. In Proceedings of the 2017 IEEE International Conference on Smart Grid Communications (SmartGridComm), Dresden, Germany, 23–26 October 2017; pp. 223–228. [Google Scholar] [CrossRef]
- Widiputra, V.; Jung, J. Development of Restoration Algorithm under Cold Load Pickup Condition using Tabu Search in Distribution System. In Proceedings of the 2018 IEEE Power Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ihara, S.; Schweppe, F.C. Physically Based Modeling of Cold Load Pickup. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 4142–4150. [Google Scholar] [CrossRef]
- Nehrir, M.; Dolan, P.; Gerez, V.; Jameson, W. Development and validation of a physically-based computer model for predicting winter electric heating loads. IEEE Trans. Power Syst. 1995, 10, 266–272. [Google Scholar] [CrossRef]
- Laurent, J.; Malhame, R. A physically-based computer model of aggregate electric water heating loads. IEEE Trans. Power Syst. 1994, 9, 1209–1217. [Google Scholar] [CrossRef]
- Song, M.; nejad, R.R.; Sun, W. Robust Distribution System Load Restoration With Time-Dependent Cold Load Pickup. IEEE Trans. Power Syst. 2021, 36, 3204–3215. [Google Scholar] [CrossRef]
- Fan, R.; Sun, R.; Liu, Y. A Reduction Approach for Load Pickup Amount Considering Thermostatically Controlled Loads. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021; pp. 1634–1638. [Google Scholar] [CrossRef]
- NEW Netz GmbH. Household Load Profile. 2016. Available online: https://www.new-netz-gmbh.de/energie-marktpartner/veroeffentlichungspflichten/stromnzv/standardlastprofile (accessed on 1 December 2016).
- Renner, H.; Stadler, S.A.; Wakolbinger, C. Cold Load Pickup; TU Graz: Graz, Austria, 2013. [Google Scholar]
- IEEE Power and Energy Society. IEEE Recommended Practice for Excitation System Models for Power System Stability Studies; Technical Report. 2016. Available online: https://ieeexplore.ieee.org/document/7553421 (accessed on 1 December 2016).
- Cigre. Technical Brochure of Modeling of Gas Turbines and Steam Turbines in Combined Cycle Power Plants; Technical Report, Task Force C4.02.25. 2003. Available online: https://e-cigre.org/publication/238-modeling-of-gas-turbines-and-steam-turbines-in-combined-cycle-power-plants (accessed on 1 December 2016).
- Lammert, G.; Klingmann, A.; Hachmann, C.; Lafferte, D.; Becker, H.; Paschedag, T.; Heckmann, W.; Braun, M. Modelling of Active Distribution Networks for Power System Restoration Studies. In Proceedings of the 10th IFAC Symposium on Control of Power and Energy Systems, Tokyo, Japan, 4–6 September 2018. [Google Scholar]
- Western Electricity Coordinating Council (WECC) Renewable Energy Modeling Task Force. WECC Solar PV Dynamic Model Specification. 2012. Available online: https://www.wecc.biz/Reliability/WECC%20Solar%20PV%20Dynamic%20Model%20Specification%20-%20September%202012.pdf (accessed on 10 November 2015).
- VDE-AR-N 4120-2018-11; Technische Regeln für den Anschluss von Kundenanlagen an das Hochspannungsnetz und deren Betrieb (Technical Requirements for the Connection and Operation of Customer Installations to the High Voltage Network). VDE Verlag GmbH: Berlin/Offenbach, Germany, 2018.
- VDE-AR-N 4105; Erzeugungsanlagen am Niederspannungsnetz (Guideline for the Connection and Parallel Operation of Generation Units at Low Voltage Level). VDE Verlag GmbH: Berlin/Offenbach, Germany, 2018.
- VDE-AR-N 4110; Technische Anschlussregel Mittelspannung (Guideline for the Connection and Parallel Operation of Generation Units at Medium Voltage Level). VDE Verlag GmbH: Berlin/Offenbach, Germany, 2022.
- Van Cutsem, T.; Vournas, C. Voltage Stability of Electric Power Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mean | Median | Standard Deviation |
|---|---|---|---|
| a in p.u. (ED model) | 0.63 | 0.62 | 0.39 |
| in hours (ED model) | 776 | 0.16 | 3182 |
| a in p.u. (DED model) | 0.59 | 0.59 | 0.39 |
| in hours (DED model) | 521 | 0.15 | 2804 |
| in hours (DED model) | 0.05 | 0.00 | 0.09 |
| Parameter | Correlation with Outage Duration in DE Model | Correlation with Outage Duration in DED Model |
|---|---|---|
| a in p.u. | −0.05 | −0.06 |
| in hours | −0.17 | −0.21 |
| in hours | N/A | 0.15 |
| CLPU Model | in Hz | in Hz | in MW |
|---|---|---|---|
| Mean result | 49.72 | 50.24 | 11.62 |
| Standard deviation of result | 0.176 | 0.023 | 1.73 |
| RMSE ED model | 0.180 | 0.025 | 1.78 |
| RMSE DED model | 0.183 | 0.023 | 1.69 |
| RMSE step to maximal load MW) | 0.180 | 0.043 | 3.21 |
| RMSE step to steady-state load (5 MW) | 0.304 | 0.043 | 3.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hachmann, C.; Becker, H.; Braun, M. Cold Load Pickup Model Adequacy for Power System Restoration Studies. Energies 2022, 15, 7675. https://doi.org/10.3390/en15207675
Hachmann C, Becker H, Braun M. Cold Load Pickup Model Adequacy for Power System Restoration Studies. Energies. 2022; 15(20):7675. https://doi.org/10.3390/en15207675
Chicago/Turabian StyleHachmann, Christian, Holger Becker, and Martin Braun. 2022. "Cold Load Pickup Model Adequacy for Power System Restoration Studies" Energies 15, no. 20: 7675. https://doi.org/10.3390/en15207675
APA StyleHachmann, C., Becker, H., & Braun, M. (2022). Cold Load Pickup Model Adequacy for Power System Restoration Studies. Energies, 15(20), 7675. https://doi.org/10.3390/en15207675