
Faulty Line Selection Method Based on Comprehensive Dynamic Time Warping Distance in a Flexible Grounding System

Abstract
:1. Introduction
- Able to determine the faulty line or busbar fault under diverse fault conditions;
- Applicable for single-phase grounding fault in distribution network with renewable energy sources connected;
- Applicable for high-resistance grounding fault detection, and the ability to detect transition resistance is up to 5000 Ω;
- Under extreme fault conditions, the faulty line selection accuracy of the method proposed in this paper is higher than that of the existing traditional methods.
2. Materials and Methods
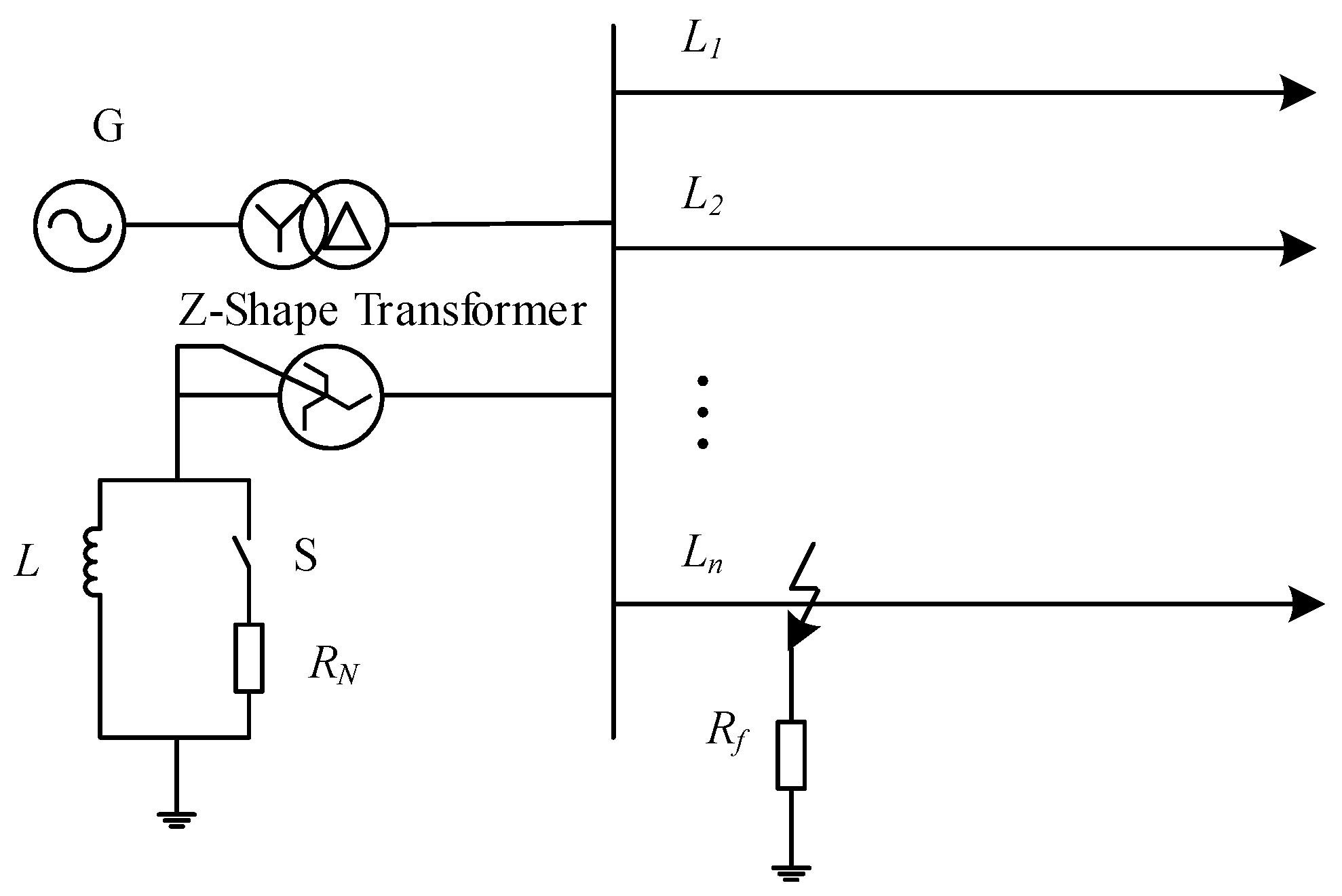
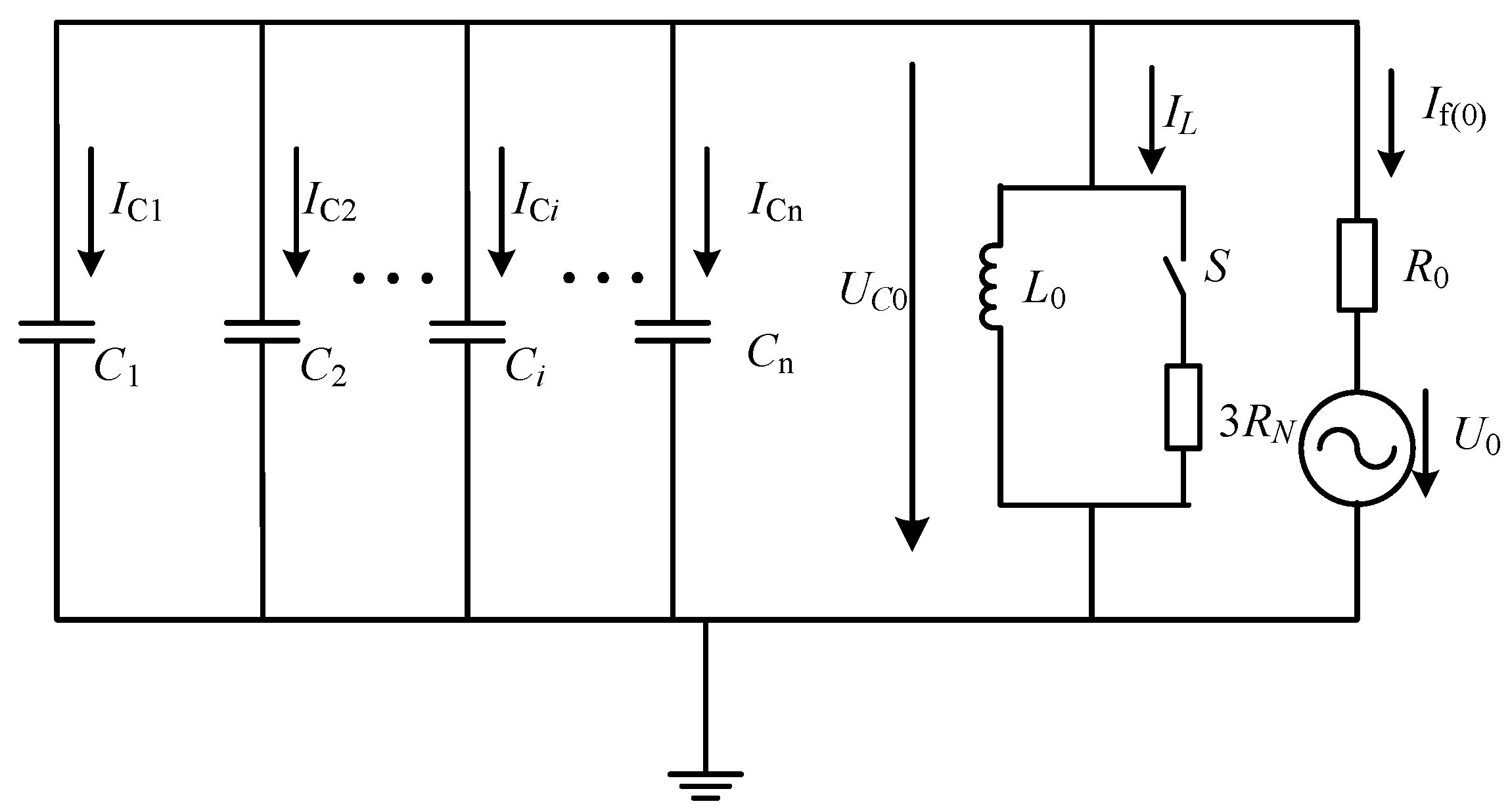
2.1. Transient Current Characteristics of Single-Phase Grounding Fault in Flexible Grounding System
2.2. Faulty Line Selection Method Using CDTW Distance
2.2.1. The Principle of DTW Distance
- (1)
- Boundary conditions
- (2)
- Monotonicity
- (3)
- Continuity
2.2.2. Comprehensive Similarity Coefficient of Waveform
2.2.3. Waveform Processing Method of Transient Zero-Sequence Current
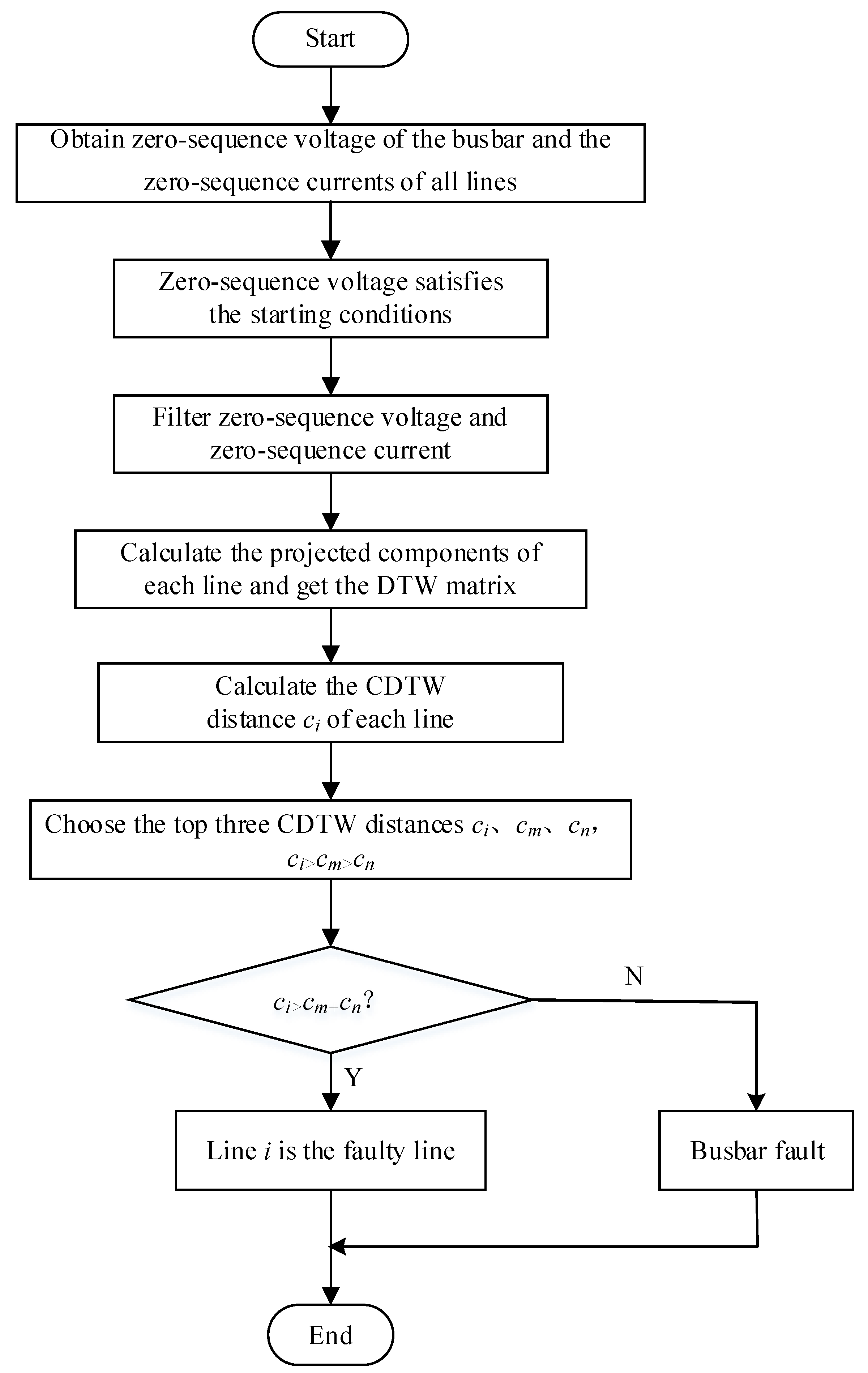
2.2.4. Principle of Faulty Line Selection Method
- (1)
- When the monitored instantaneous value of the zero-sequence voltage of the busbar is greater than the threshold KuUn (Un is the rated voltage of the busbar, and the coefficient Ku is usually set to be 0.35 [21]), the faulty line selection process is started.
- (2)
- The zero-sequence voltage of the busbar and the zero-sequence current of each line are extracted, so the interference of the steady-state component and the unbalanced component is eliminated.
- (3)
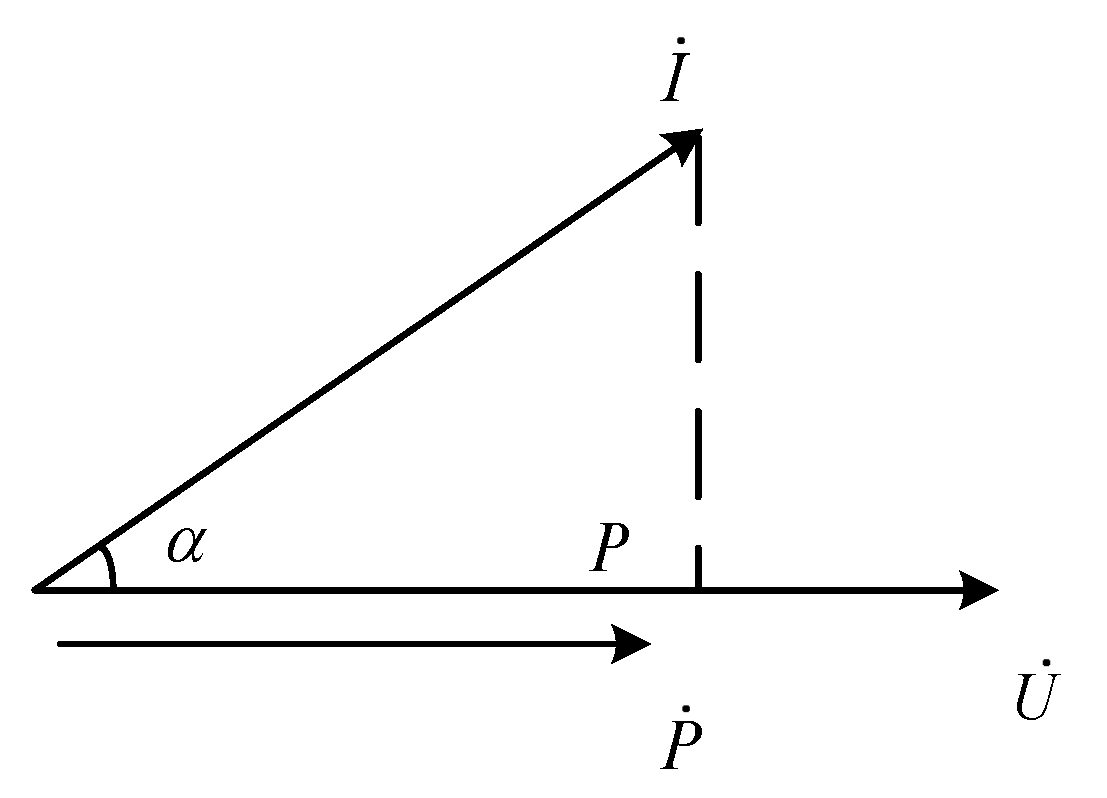
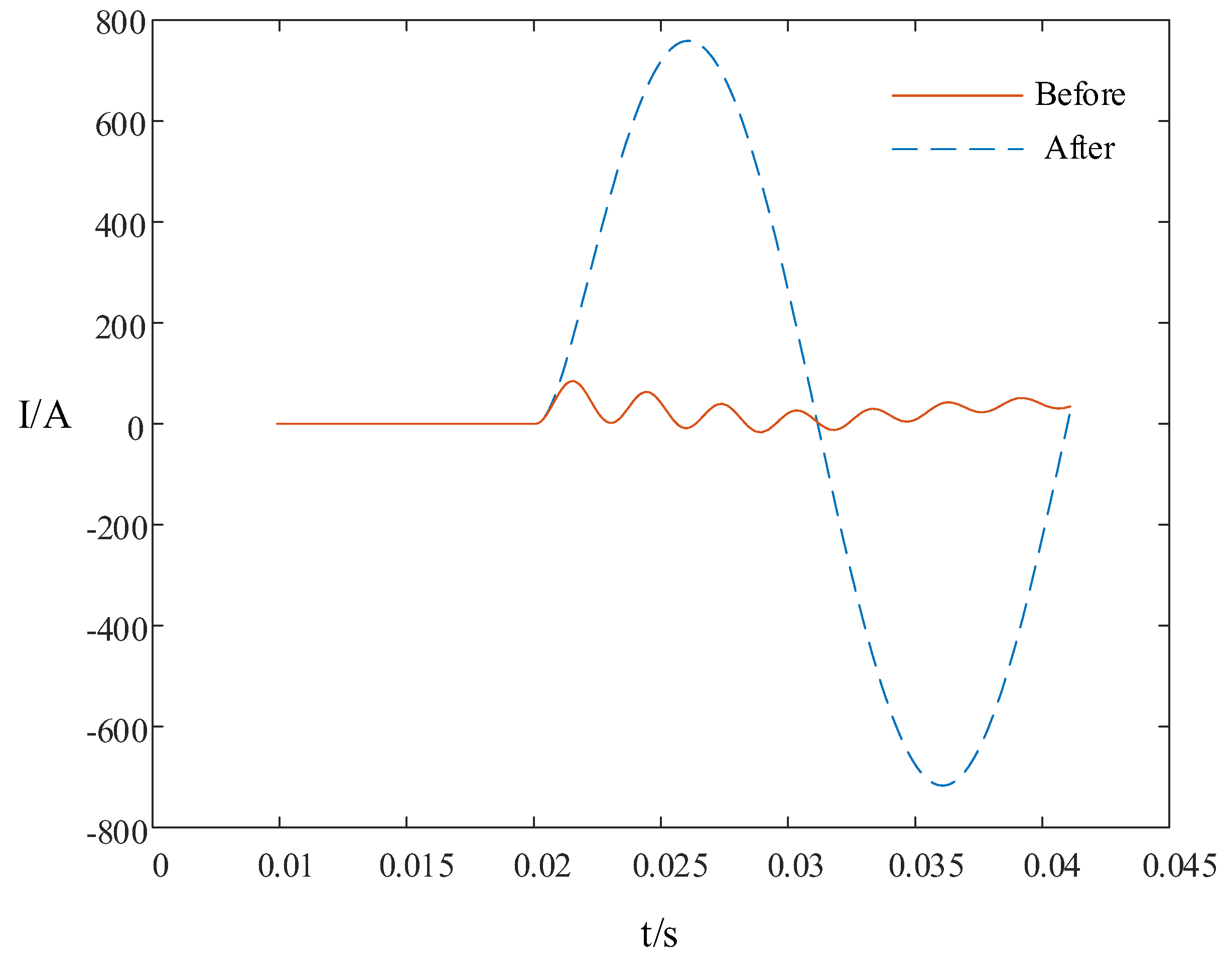
- The transient zero-sequence current of the line is projected to the transient zero-sequence voltage of the busbar, and the projection component is calculated by Equation (9).
- (4)
- The top three CDTW distances ci, cm, and cn are selected to form the criterion for faulty line selection, . If the condition of is met, line i is selected as the faulty line; otherwise, the busbar fault is determined.
3. Results and Discussion
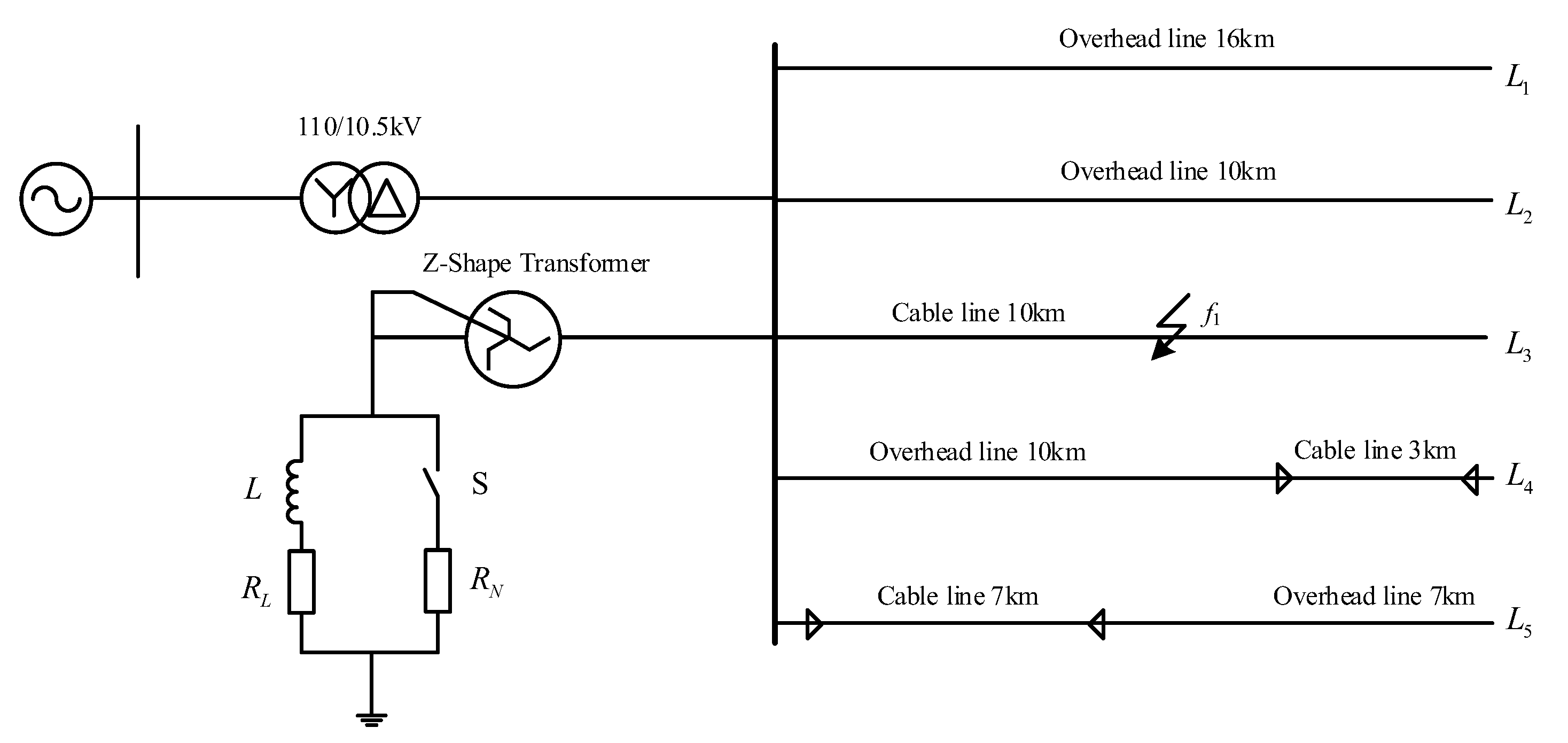
3.1. Simulation Model and Parameters
3.2. Fault Simulation Analysis under Diverse Conditions
3.2.1. Line Selection Results under Different Transition Resistance
3.2.2. Line Selection Results under Different Fault Inception Angle
3.2.3. Line Selection Results under Different Fault Distance
3.2.4. Line Selection Results in Case of Busbar Failure
3.2.5. Line Selection Results Considering the Access of Renewable Energy Sources
3.2.6. Line Selection Results Compared with Other Methods
3.3. Field Data Test and Analysis
4. Conclusions
- (1)
- Projecting the transient zero-sequence current of the line on the transient zero-sequence voltage of the busbar by the transient projection method can distinguish the difference between the faulty line and non-faulty line more clearly, which would improve the accuracy of single-phase grounding line selection in the flexible grounding system.
- (2)
- The faulty line selection method proposed in this paper can accurately select the faulty line in spite of different transition resistances, fault inception phase angles, and fault point locations.
- (3)
- A large amount of simulation data shows that the method proposed in this paper has strong adaptability to the occurrence of a high-resistance fault in flexible grounding systems, and the ability to detect transition resistance is up to 5000 Ω.
- (4)
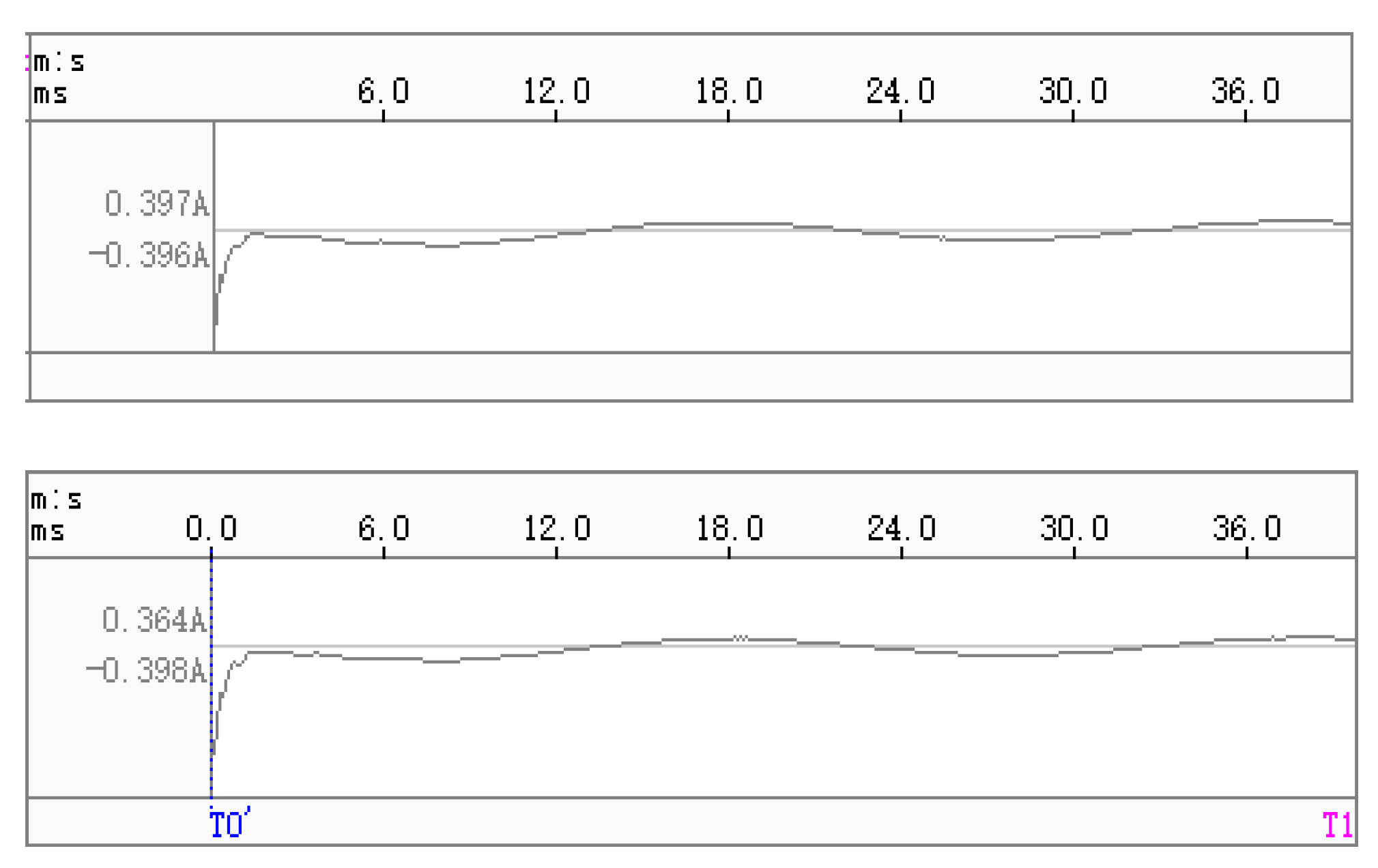
- The field data test also shows the effectiveness of the faulty line selection method based on the CDTW distance proposed in this paper.
- (5)
- The simulation results show that the proposed method is also effective in distribution networks with renewable energy sources connected.
- (6)
- Compared with the methods based on, Wavelet packet energy, Grey relational degree, and Fifth harmonic, the proposed method in this paper is more reliable.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| DTW | Dynamic Time Warping |
| Rf | transition resistance at the fault point (ohm) |
| L | inductance of the arc suppression coil (H) |
| Ci | zero-sequence distributed capacitance of the non-faulty line (F) |
| Cn | zero-sequence distributed capacitance of the faulty line (F) |
| L0 | equivalent inductance of the arc suppression coil (H) |
| R0 | equivalent zero-sequence resistance of the transition resistance (ohm) |
| UC0 | zero-sequence voltage of the busbar (V) |
| U0 | zero-sequence equivalent voltage at the fault point (V) |
| If(0) | zero-sequence current of the faulty line (I) |
| ci | comprehensive similarity coefficient |
| v | degree of over-compensation |
| fN | power frequency (Hz) |
| RL | resistive active power loss of the arc suppression coil (ohm) |
References
- Tang, Y.; Chang, Y.; Tang, J.; Xu, B.; Ye, M.; Yang, H. A Novel Faulty Phase Selection Method for Single-Phase-to-Ground Fault in Distribution System Based on Transient Current Similarity Measurement. Energies 2021, 14, 4695. [Google Scholar] [CrossRef]
- Shao, W.; Bai, J.; Cheng, Y.; Zhang, Z.; Li, N. Research on a Faulty Line Selection Method Based on the Zero-Sequence Disturbance Power of Resonant Grounded Distribution Networks. Energies 2019, 12, 846. [Google Scholar] [CrossRef] [Green Version]
- Yu, K.; Liu, Z.; Zeng, X.; Li, J.; Yang, L. A novel full compensation method for the ground fault current of resonant grounded systems. Electr. Eng. 2021, 103, 1569–1581. [Google Scholar] [CrossRef]
- Ye, S.; Ma, Z.; Hu, X.; Jin, N.; Shen, Z.; Wan, Y.; Zhou, H. Study on Security and Reliability of Distribution Network Neutral Grounding Mode Through Arc Suppression Coil and Line-selecting Resistance in Parallel. Energy Eng. 2011, 18–22. [Google Scholar] [CrossRef]
- Yi, M.; Yan, T.; Zhou, Z.; Peng, J. Experimental study on single phase grounding fault of a neutral grounding device consisted of an arc suppression coil and a parallel controllable switching low resistance. Hubei Electr. Power 2017, 41, 20–23. [Google Scholar]
- Veerasamy, V.; Wahab, N.I.A.; Ramachandran, R.; Mansoor, M.; Thirumeni, M.; Othman, M.L. High Impedance Fault Detection in Medium Voltage Distribution Network Using Discrete Wavelet Transform and Adaptive Neuro-Fuzzy Inference System. Energies 2018, 11, 3330. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, H.; Shi, F.; Wu, Q.; Terzija, V.; Xie, W.; Fang, C. Location of single phase to ground faults in distribution networks based on synchronous transients energy analysis. IEEE Trans. Smart Grid 2020, 11, 774–785. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Li, Y.; Wang, W.; Song, J.; Zhang, Y. Fault Line Detection Method for Flexible Grounding System Based on the Change of Phase Difference between Zero Sequence Current and Voltage. Power Syst. Technol. 2021, 45, 4847–4855. [Google Scholar]
- Xu, Q.; Xu, Y.; Zhou, D.; Xi, X. Single-phase high-resistance grounding analysis of low-resistance grounded distribution network line protection. Power Syst. Autom. 2010, 34, 91–94, 115. (In Chinese) [Google Scholar]
- Yang, F.; Jin, X.; Shen, Y.; Lei, Y.; Xue, Y.; Xu, B. Ground fault direction discrimination algorithm for flexible grounding system based on zero sequence admittance change. Power Syst. Autom. 2020, 44, 88–97. (In Chinese) [Google Scholar]
- Xue, Y.; Liu, S.; Wang, Y.; Xu, B. Groundingfault protection in low resistance grounding system based on zerosequencevoltage ratio restrain. Autom. Electr. Power Syst. 2016, 40, 112–117. (In Chinese) [Google Scholar]
- Sheng, Y.; Cong, W.; Bu, X.; Li, X. Detectionmethod of high impedance grounding fault based on differentialcurrent of zero-sequence current projection and neutral pointcurrent in low-resistance grounding system. Electr. Power Autom. Equip. 2019, 39, 17–22. (In Chinese) [Google Scholar]
- Alhelou, H.H.; Golshan, M.E.H.; Hatziargyriou, N.D. Deterministic Dynamic State Estimation-Based Optimal LFC for Interconnected Power Systems Using Unknown Input Observer. IEEE Trans. Smart Grid 2019, 11, 1582–1592. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Golshan, M.H.; Askari-Marnani, J. Robust sensor fault detection and isolation scheme for interconnected smart power systems in presence of RER and EVs using unknown input observer. Int. J. Electr. Power Energy Syst. 2018, 99, 682–694. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Golshan, M.E.H.; Hatziargyriou, N.D. A Decentralized Functional Observer based Optimal LFC Considering Unknown Inputs, Uncertainties and Cyber-Attacks. IEEE Trans. Power Syst. 2019, 34, 4408–4417. [Google Scholar] [CrossRef]
- Zhuang, S.; Miu, X.; Jiang, Y.; Guo, M. A Line Selection Method for Single-phase High-impedance Grounding Fault in Resonant Grounding System of Distribution Network Based on Improved Euclidean-dynamic Time Warping Distance. Power Syst. Technol. 2020, 44, 273–281. [Google Scholar] [CrossRef]
- Huang, C.; Liu, P.; Jiang, Y.; Leng, H.; Zhu, J. Line Differential Protection Based on Dynamic Time Warping Distance in Active Distribution Network. Trans. China Electrotech. Soc. 2017, 32, 240–247. (In Chinese) [Google Scholar]
- Chu, J.; Yuan, X.; Chen, B.; Wang, X.; Qiu, H.; Gu, W. A Method for Distribution Network Voltage Sag Source Identification Combining Wavelet Analysis and Modified DTW Distance. Power Syst. Technol. 2018, 42, 637–643. [Google Scholar]
- Shu, H.; Zhu, M.; Huang, W.; Duan, R. Faulty line. selection based on time-frequency characteristics of transient zerosequence current. Electr. Power Autom. Equip. 2013, 33, 1–6. (In Chinese) [Google Scholar]
- Zhan, Q. Distribution Network High Impedance Fault Resolving Technique Study Based on Transition State Projection Method; Fuzhou University: Fuzhou, China, 2018. [Google Scholar]
- Wei, X.; Shu, N. Single-phase grounding fault line selection method of distribution network based on Hausdorff distance. J. Electr. Power Syst. Autom. 2020, 32, 133–142. [Google Scholar]
- Haesalhelou, H.; Parthasarathy, H.; Nagpal, N.; Agarwal, V.; Nagpal, H.; Siano, P. Decentralised Stochastic Disturbance Observer-Based Optimal Frequency Control Method for Interconnected Power Systems with High Renewable Shares. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Alhelou, H.A.H.; Cuffe, P. A Dynamic State Estimator Based Tolerance Control Method Against Cyberattack and Erroneous Measured Data for Power Systems. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Parameters | ||||||
|---|---|---|---|---|---|---|
| Overhead line | 0.2750 | 0.0054 | 4.6000 | 0.1250 | 0.0096 | 1.3000 |
| Cable line | 2.7000 | 0.2800 | 1.0190 | 0.2700 | 0.3990 | 0.2550 |
| Transition Resistance/Ω | CDTW Distance of Line 1–5 | Selection Criterion | |||||
|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | |||
| 0 | B | 104.3 | 108.2 | 482.3 | 113.8 | 106.7 | 482.3 > 222.0 |
| A | 16.2 | 16.8 | 973.9 | 17.5 | 18.3 | 973.85 > 35.72 | |
| 10 | B | 31.1 | 32.4 | 150.8 | 27.8 | 37.5 | 150.8 > 69.9 |
| A | 5.5 | 5.7 | 337.5 | 6.0 | 6.2 | 337.52 > 12.18 | |
| 100 | B | 1.0 | 1.0 | 5.2 | 0.8 | 1.3 | 5.2 > 2.3 |
| A | 0.2 | 0.3 | 15.3 | 0.3 | 0.3 | 15.27 > 0.53 | |
| 1000 | B | 0.01 | 0.01 | 0.06 | 0.01 | 0.01 | 0.06 > 0.02 |
| A | 3.1 × 10−3 | 3.2 × 10−3 | 0.2 | 3.0 × 10−3 | 3.2 × 10−3 | 0.194 > 6.4 × 10−3 | |
| 3000 | B | 1.2 × 10−3 | 1.3 × 10−3 | 6.3 × 10−3 | 9.8 × 10−4 | 1.5 × 10−3 | 6.3 × 10−3 > 2.8 × 10−3 |
| A | 3.5 × 10−4 | 3.6 × 10−4 | 0.02 | 3.7 × 10−4 | 3.9 × 10−4 | 0.022 > 7.6 × 10−4 | |
| 5000 | B | 4.4 × 10−4 | 4.5 × 10−4 | 2.3 × 10−3 | 3.6 × 10−4 | 5.7 × 10−4 | 2.3 × 10−3 > 1.0 × 10−3 |
| A | 1.3 × 10−4 | 1.8 × 10−4 | 0.008 | 2.2 × 10−4 | 2.3 × 10−4 | 0.008 > 4.5 × 10−4 | |
| Fault Inception Phase Angle/Rad | CDTW Distance of Line 1–5 | Selection Criterion | |||||
|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | |||
| 0 | B | 66.0 | 508.3 | 64.4 | 28.7 | 25.4 | 508.3 > 130.4 |
| A | 3.9 | 265.4 | 3.1 | 1.3 | 1.3 | 265.4 > 7.0 | |
| B | 958.2 | 6898.2 | 881.3 | 390.8 | 366.1 | 6898.2 > 1839.5 | |
| A | 80.7 | 3244.5 | 57.5 | 26.2 | 26.7 | 3244.5 > 138.2 | |
| B | 1549.6 | 18,925.0 | 1350.6 | 564.7 | 565.3 | 18,925.0 > 2900.2 | |
| A | 146.2 | 6513.3 | 103.7 | 45.6 | 48.0 | 6513.3 > 249.9 | |
| B | 1159.3 | 11,190.5 | 978.6 | 400.6 | 423.4 | 11,190.5 > 2137.9 | |
| A | 154.3 | 6141.3 | 105.0 | 39.9 | 48.8 | 6141.3 > 259.3 | |
| B | 156.5 | 2586.4 | 165.1 | 76.2 | 70.9 | 2586.4 > 321.6 | |
| A | 14.8 | 1683.8 | 14.4 | 6.0 | 6.5 | 1683.8 > 29.2 | |
| Fault Distance/Km | CDTW Distance of Line 1–5 | Selection Criterion | |||||
|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | |||
| 1 | B | 84.0 | 86.6 | 125.8 | 457.3 | 60.5 | 457.3 > 212.4 |
| A | 22.4 | 23.1 | 33.8 | 614.5 | 15.2 | 265.4 > 7.0 | |
| 5 | B | 138.1 | 142.0 | 208.8 | 649.7 | 85.9 | 649.7 > 350.8 |
| A | 32.3 | 33.2 | 49.2 | 782.6 | 23.0 | 782.6 > 82.4 | |
| 7 | B | 123.6 | 127.1 | 185.4 | 657.9 | 88.6 | 657.9 > 312.5 |
| A | 26.9 | 32.6 | 40.7 | 684.1 | 19.2 | 684.1 > 73.3 | |
| 10 | B | 124.4 | 128.1 | 187.6 | 585.5 | 88.9 | 585.5 > 315.7 |
| A | 23.2 | 23.9 | 35.3 | 602.8 | 16.6 | 602.8 > 59.2 | |
| 12 | B | 100.1 | 103.1 | 150.3 | 520.0 | 71.6 | 520.0 > 253.4 |
| A | 18.9 | 19.4 | 28.6 | 521.7 | 13.5 | 521.7 > 48.0 | |
| Fault Inception Phase Angle/Rad | Transition Resistance /Ω | CDTW Distance of Line 1–5 | Selection Criterion | Line Selection Result | ||||
|---|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | ||||
| 0 | 0 | 55.5 | 57.2 | 70.4 | 60.7 | 44.7 | 70.4 < 117.9 | Busbar |
| 10 | 262.5 | 271.3 | 330.4 | 204.3 | 171.8 | 330.4 < 533.8 | Busbar | |
| 100 | 12.1 | 12.5 | 18.6 | 7.8 | 8.5 | 18.6 < 24.6 | Busbar | |
| 500 | 0.033 | 0.033 | 0.064 | 0.034 | 0.033 | 0.064 < 0.067 | Busbar | |
| Fault Inception Phase Angle/Rad | Transition Resistance /Ω | CDTW Distance of Line 1–5 | Selection Criterion | Line Selection Result | ||||
|---|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | ||||
| 0 | 0 | 17.8 | 18.4 | 961.7 | 24.0 | 23.1 | 961.7 > 47.1 | L3 |
| 10 | 17.1 | 17.7 | 913.2 | 19.5 | 23.9 | 913.2 > 43.4 | L3 | |
| 50 | 5.3 | 5.5 | 279.2 | 5.3 | 7.9 | 279.2 > 13.4 | L3 | |
| 100 | 2.7 | 2.8 | 145.8 | 2.0 | 4.2 | 145.8 > 7.0 | L3 | |
| 500 | 0.2 | 0.2 | 12.3 | 0.2 | 0.4 | 12.3 > 0.6 | L3 | |
| Faulty Line Selection Method | Fault Criterion | Feeder Number | Judgement Result | ||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||
| CDTW distance | the value of CDTW distance | 0.02 | 0.87 | 0.02 | 0.01 | 0.01 | L2 |
| Wavelet packet energy | relative energy | 0.06 | 0.52 | 0.46 | 0.92 | 0.55 | L4 |
| Grey relational degree | the degree of gray correlation of each feeder | 2.37 | 2.52 | 2.91 | 3.11 | 2.32 | L5 |
| Fifth harmonic | the magnitude of fifth harmonic component | 0.06 | 0.62 | 0.77 | 1.81 | 0.49 | L4 |
| CDTW Distance of Each Line | Selection Criterion | Line Selection Result | ||
|---|---|---|---|---|
| Line Zhuolan A | Line Zhuolan B | Line Zhuojin B | ||
| 2.0 × 107 | 60.0 | 60.0 | 2.0 × 107 > 120.0 | Line Zhuolan A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Zhang, X.; Wu, W.; Zhang, J.; Bai, W.; Guo, A.; Chen, Y. Faulty Line Selection Method Based on Comprehensive Dynamic Time Warping Distance in a Flexible Grounding System. Energies 2022, 15, 471. https://doi.org/10.3390/en15020471
He Y, Zhang X, Wu W, Zhang J, Bai W, Guo A, Chen Y. Faulty Line Selection Method Based on Comprehensive Dynamic Time Warping Distance in a Flexible Grounding System. Energies. 2022; 15(2):471. https://doi.org/10.3390/en15020471
Chicago/Turabian StyleHe, Yu, Xinhui Zhang, Wenhao Wu, Jun Zhang, Wenyuan Bai, Aiyu Guo, and Yu Chen. 2022. "Faulty Line Selection Method Based on Comprehensive Dynamic Time Warping Distance in a Flexible Grounding System" Energies 15, no. 2: 471. https://doi.org/10.3390/en15020471
APA StyleHe, Y., Zhang, X., Wu, W., Zhang, J., Bai, W., Guo, A., & Chen, Y. (2022). Faulty Line Selection Method Based on Comprehensive Dynamic Time Warping Distance in a Flexible Grounding System. Energies, 15(2), 471. https://doi.org/10.3390/en15020471