
Optimization-Based High-Frequency Circuit Miniaturization through Implicit and Explicit Constraint Handling: Recent Advances




Abstract
:1. Introduction
2. Optimization-Based Size Reduction
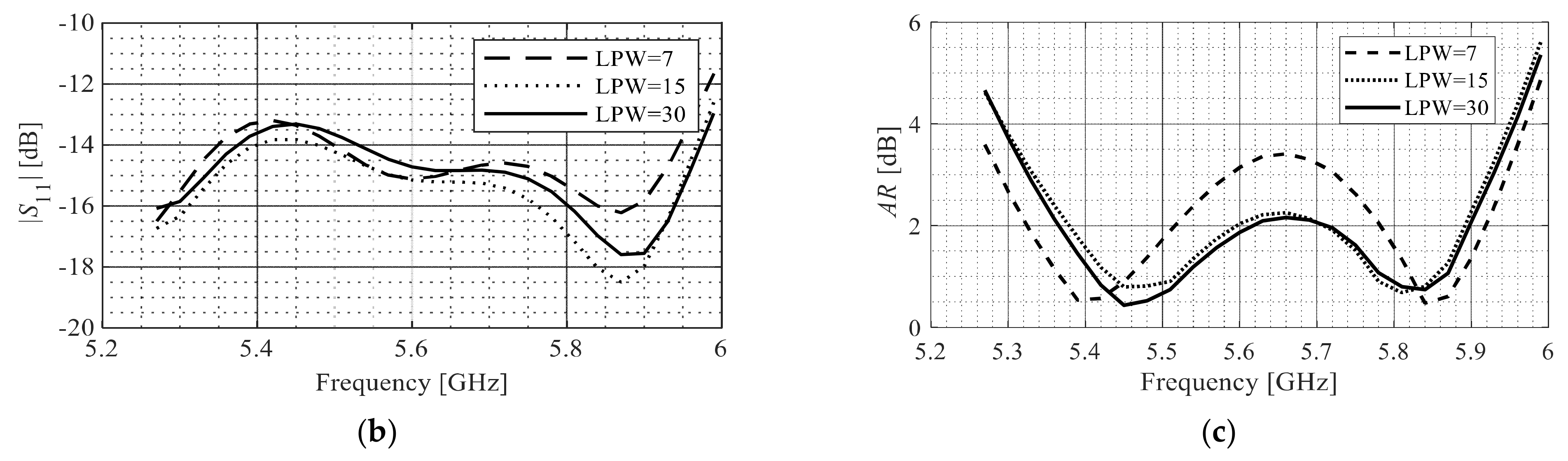
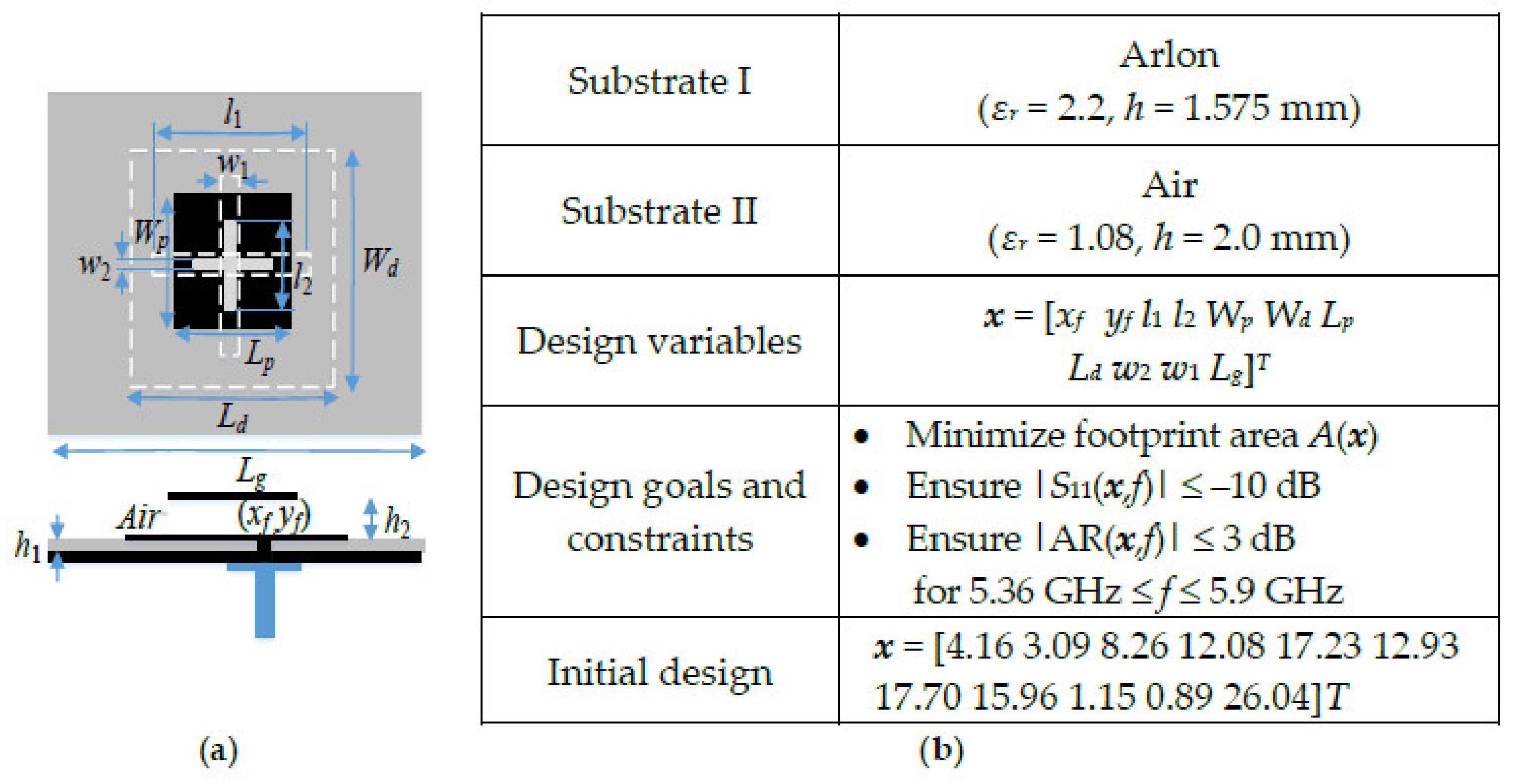
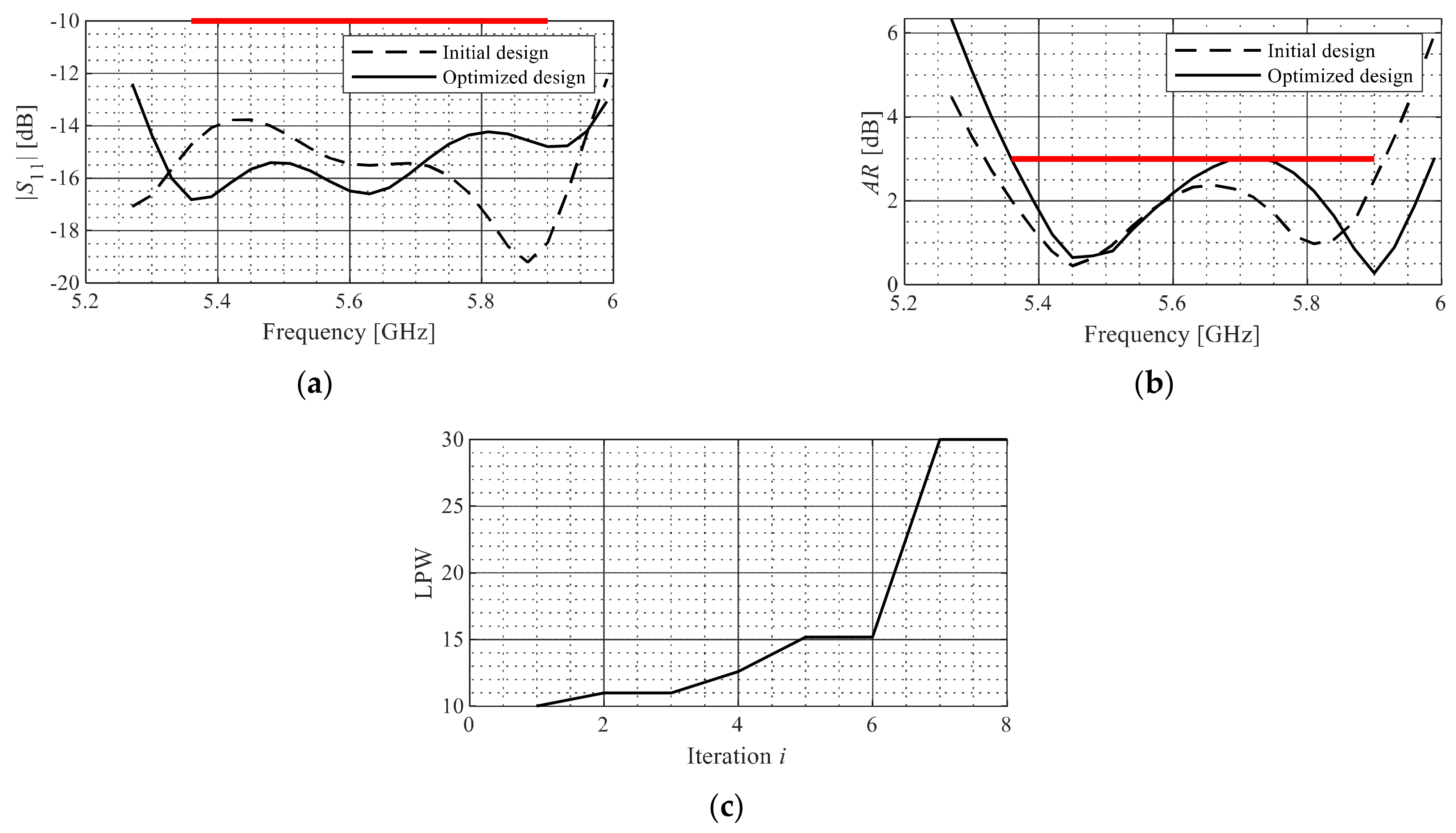
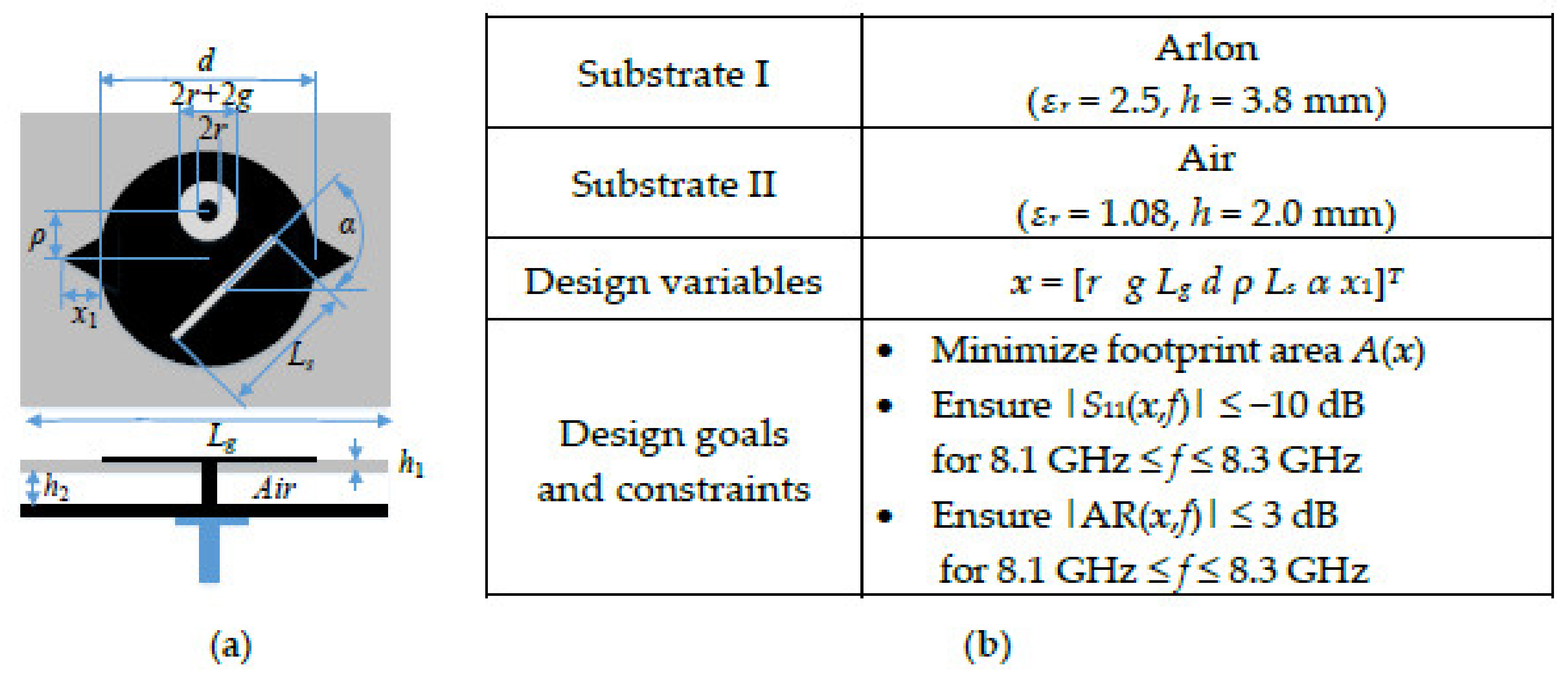
- The reflection coefficient of the antenna should not exceed −10 dB within the frequency range F, i.e., |S11(x, f)| ≤ −10 dB for f ∈ F (inequality constraint);
- Axial ratio AR should not exceed 3 dB within the frequency range F, i.e., |AR(x, f)| ≤ 3 dB for f ∈ F (also an inequality constraint);
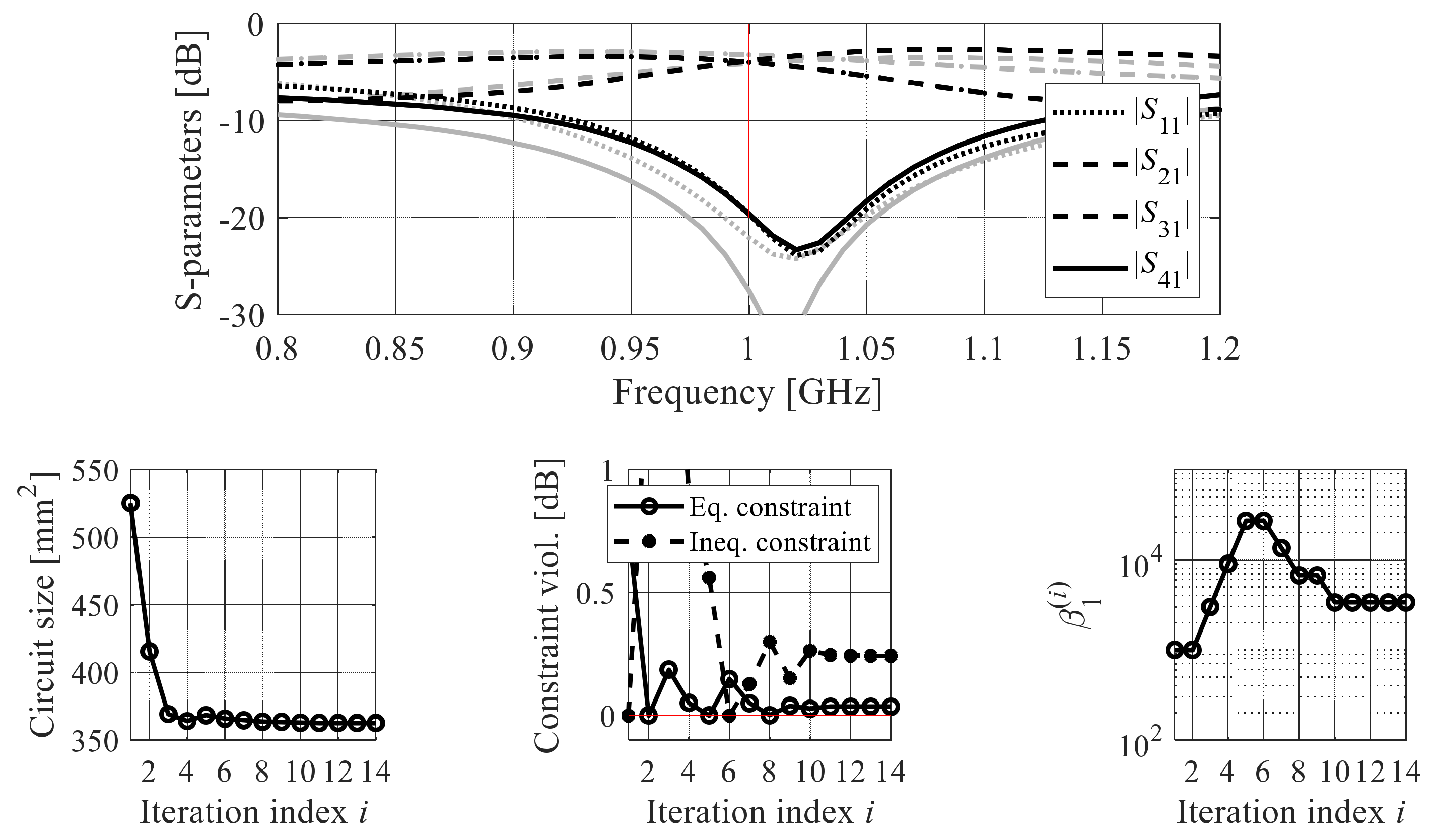
- Power split ratio of a coupling structure KP should be equal to zero at the center frequency f0, i.e., KP = |S31(x, f0)| − |S21(x, f0)| = 0 dB (equality constraint)
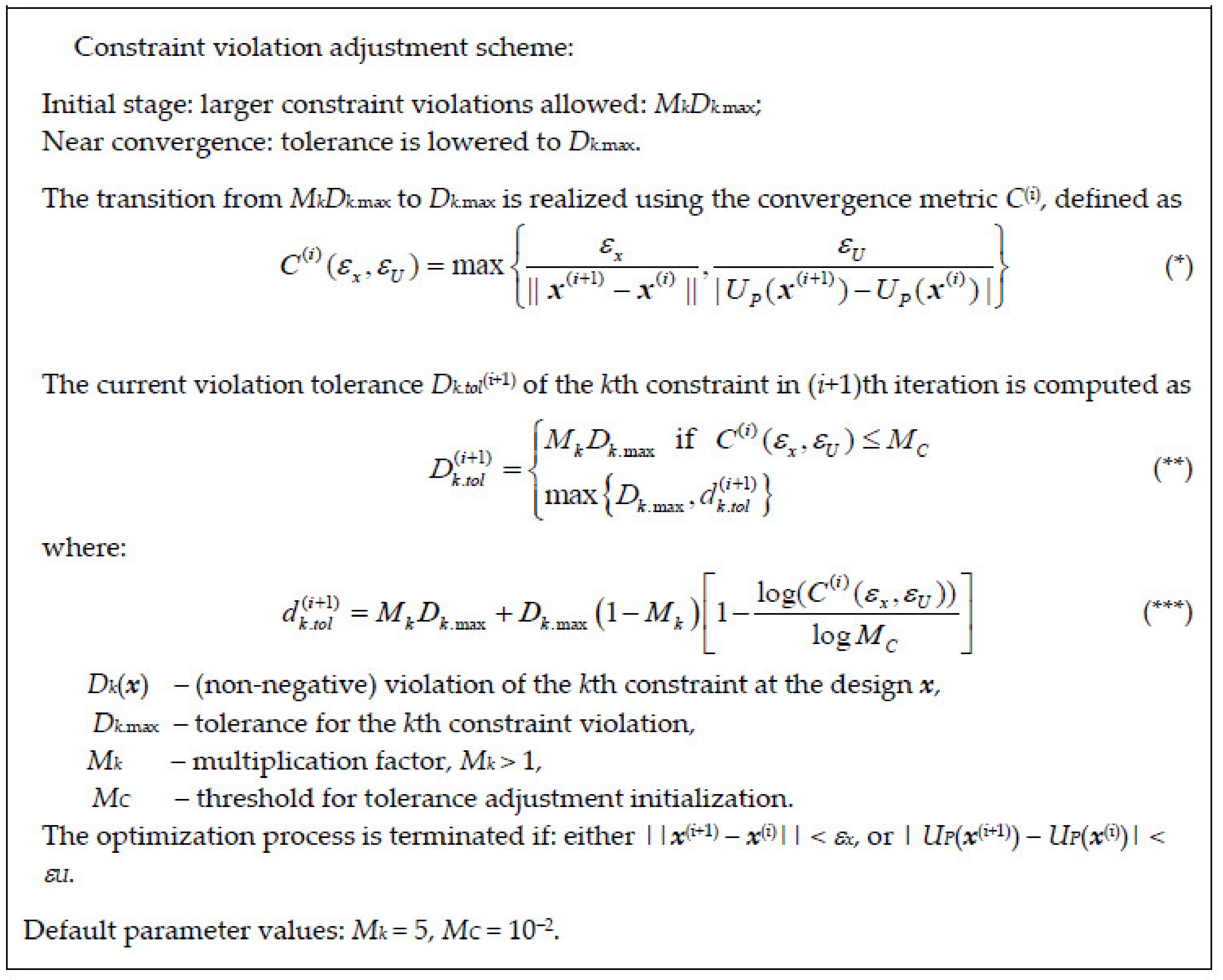
3. Adaptive Penalty Function Methods
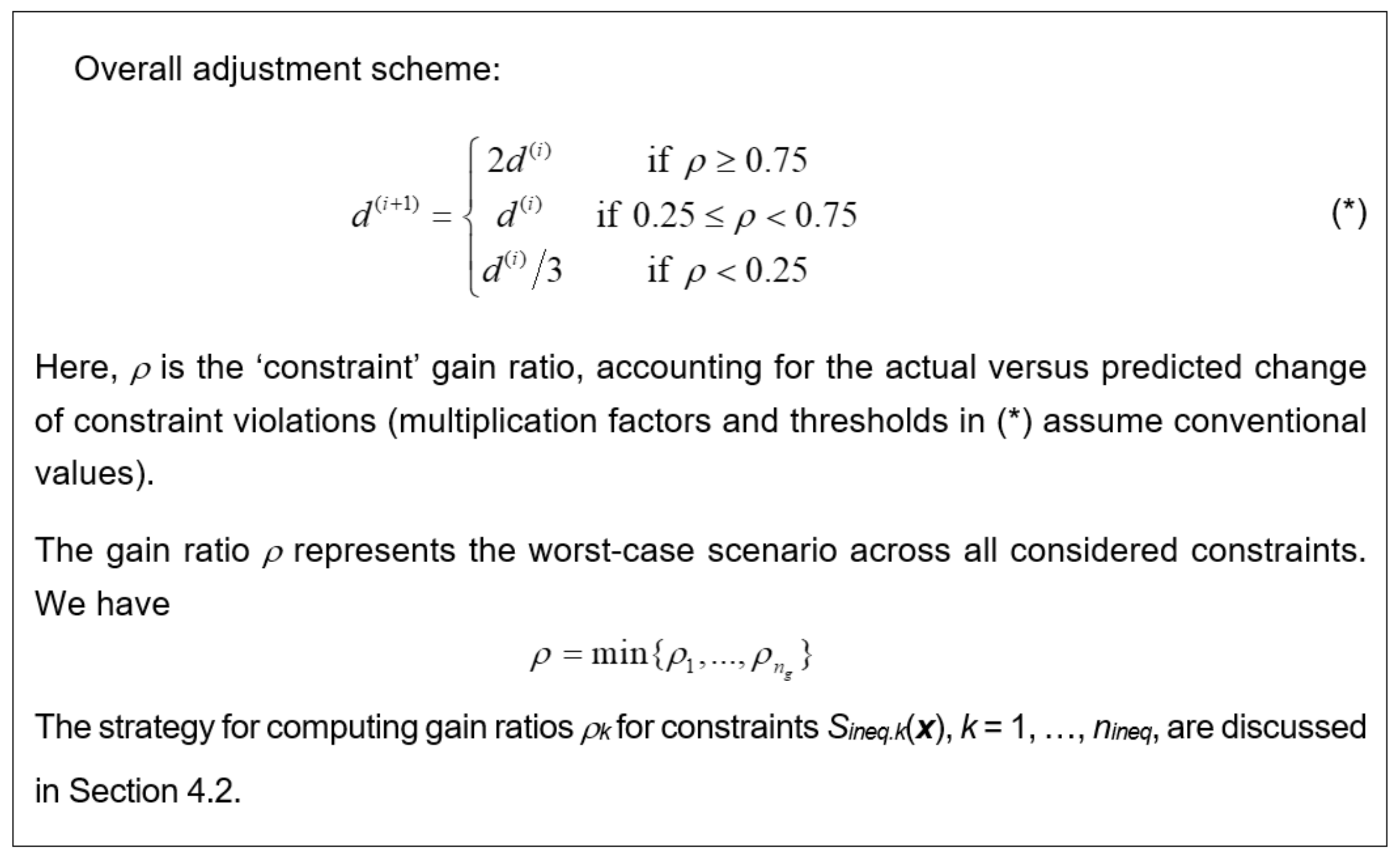
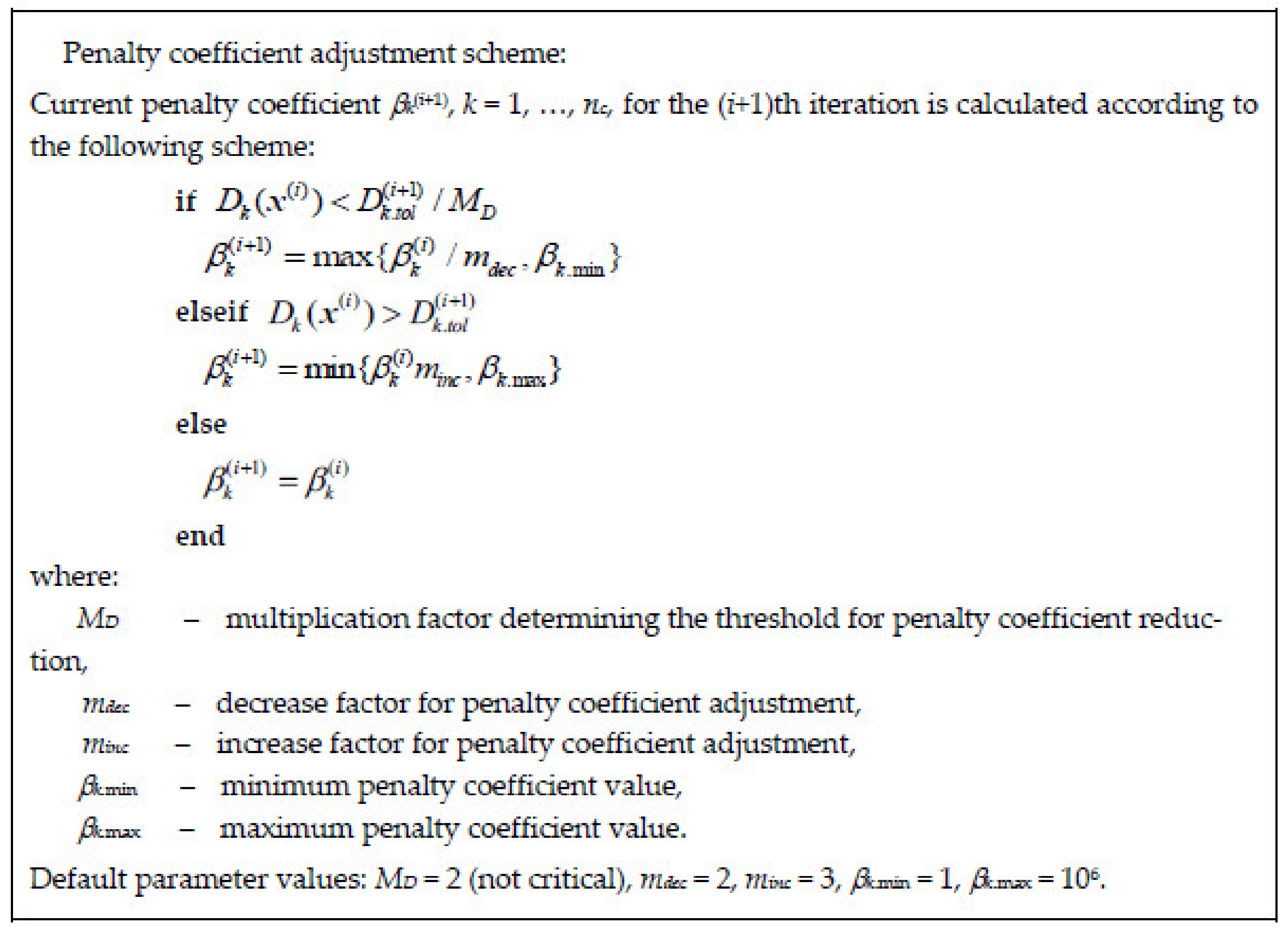
3.1. Adaptive Scheme I. Convergence Status and Constraint Violation Levels
3.1.1. Trust-Region Gradient-Based Algorithm
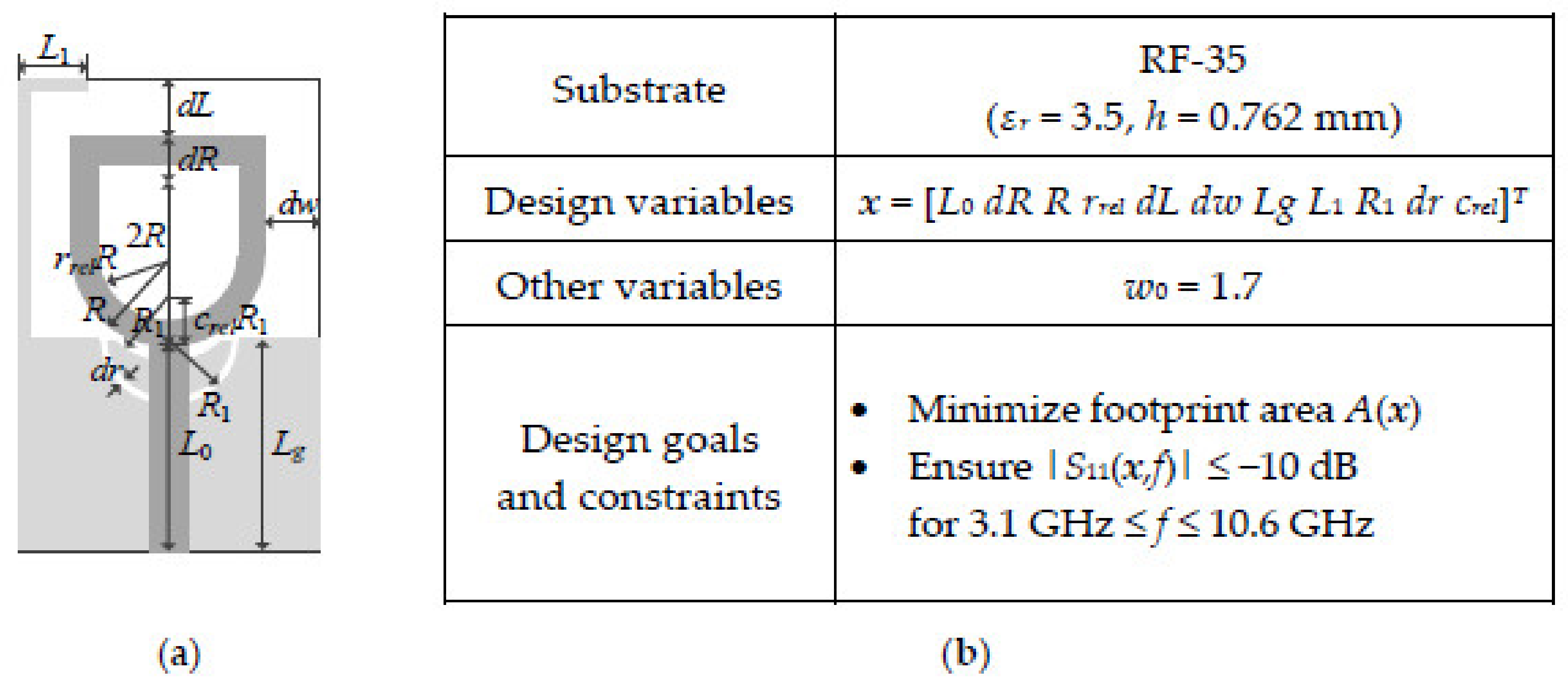
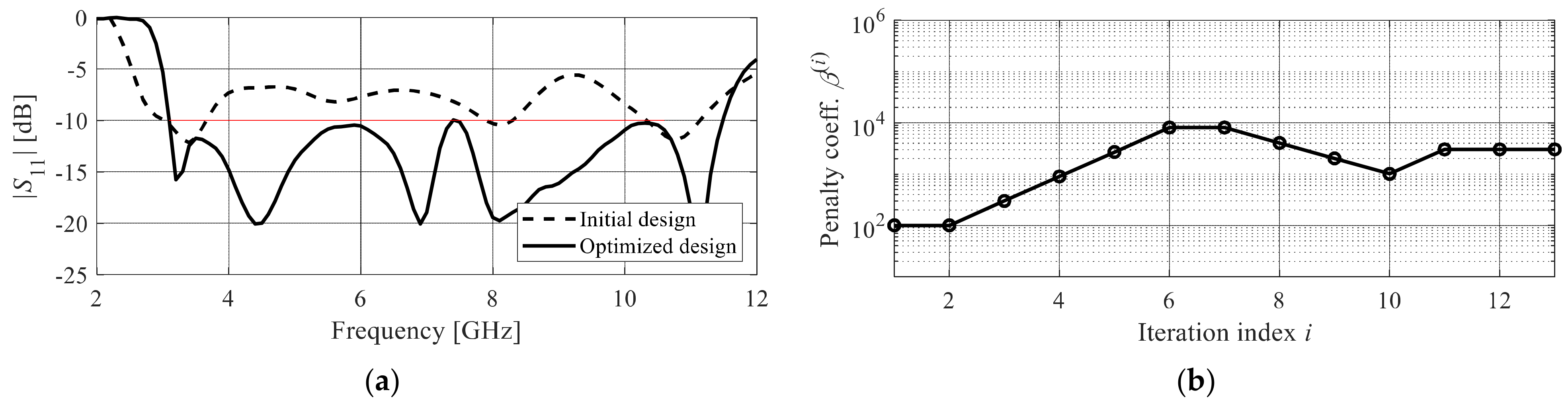
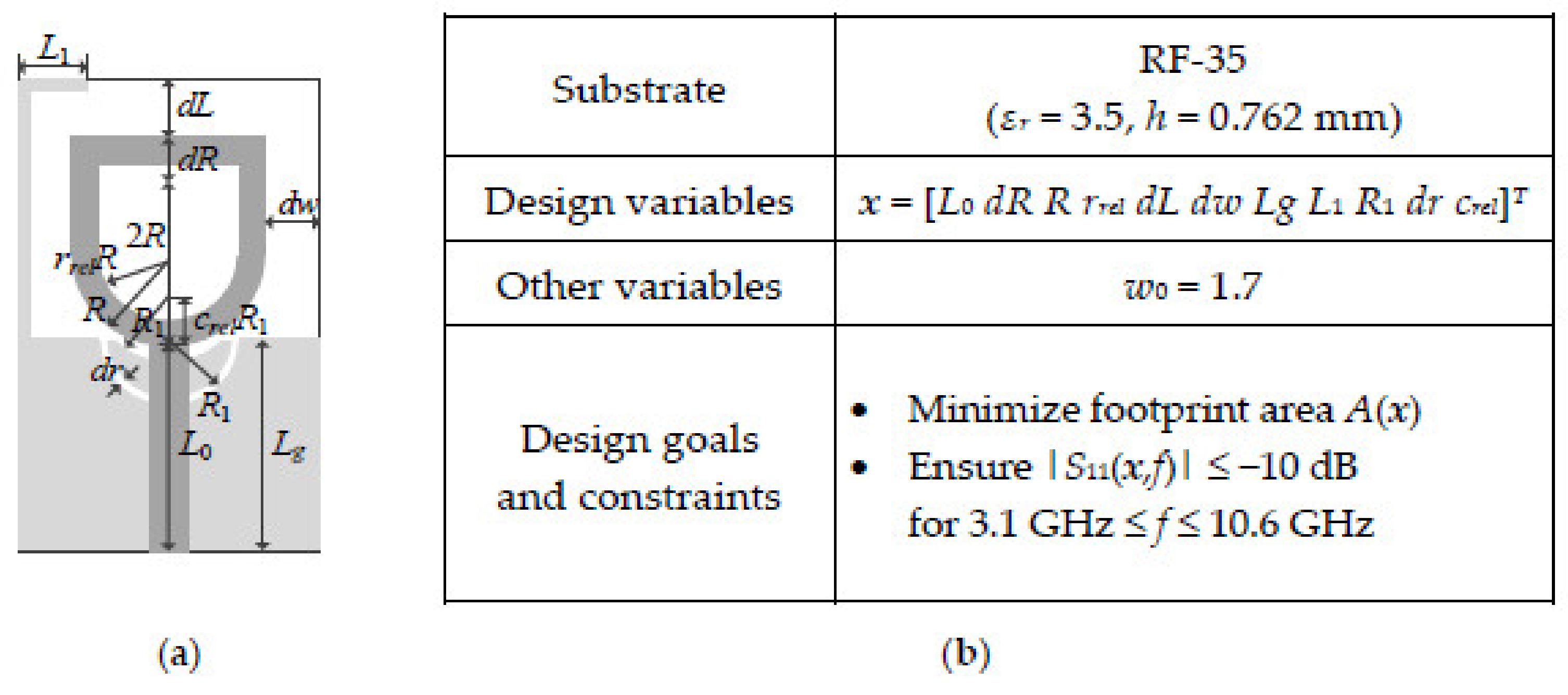
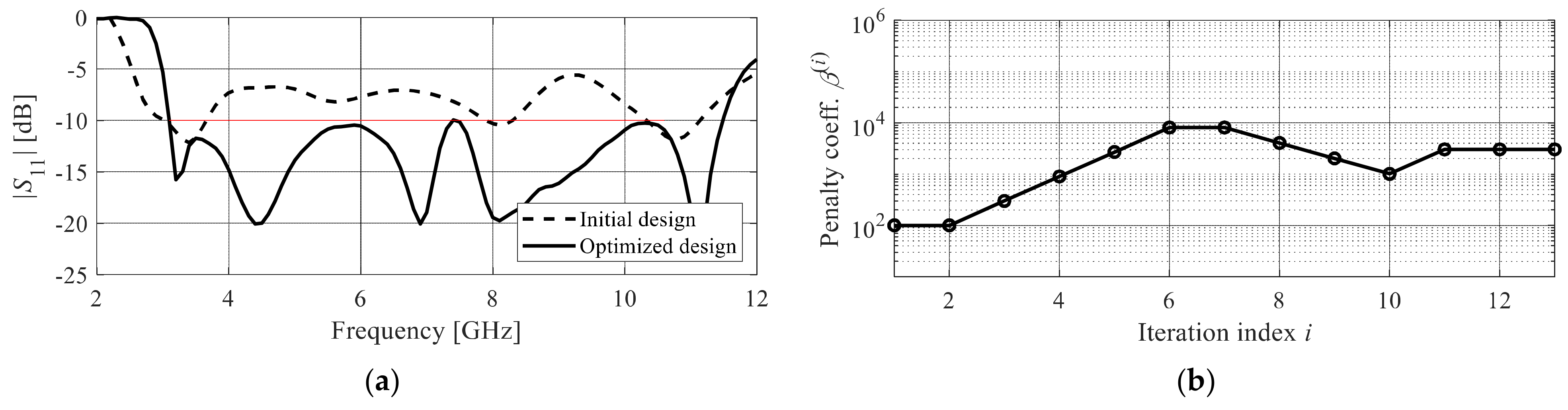
3.1.2. Example: Ultrawideband Antenna
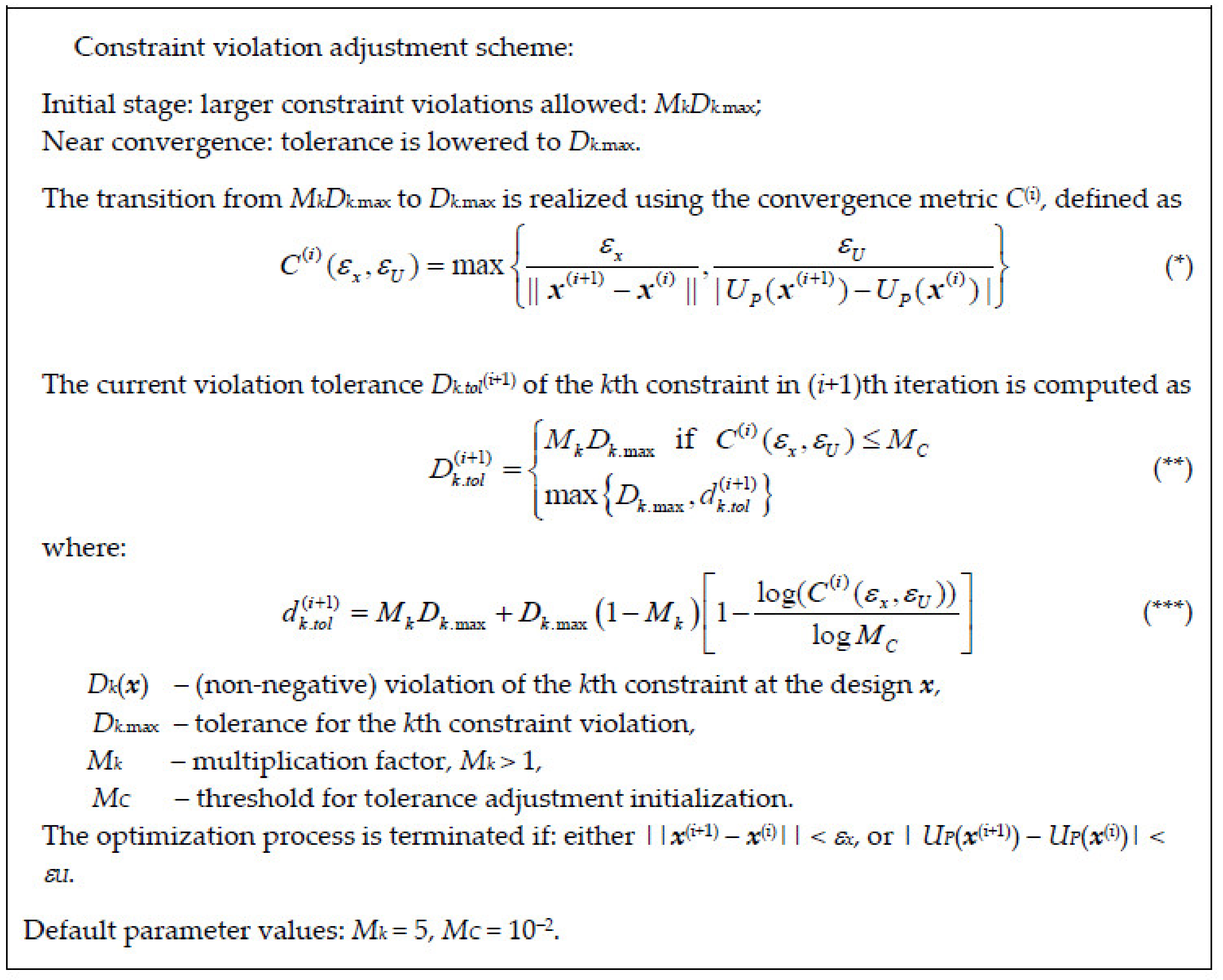
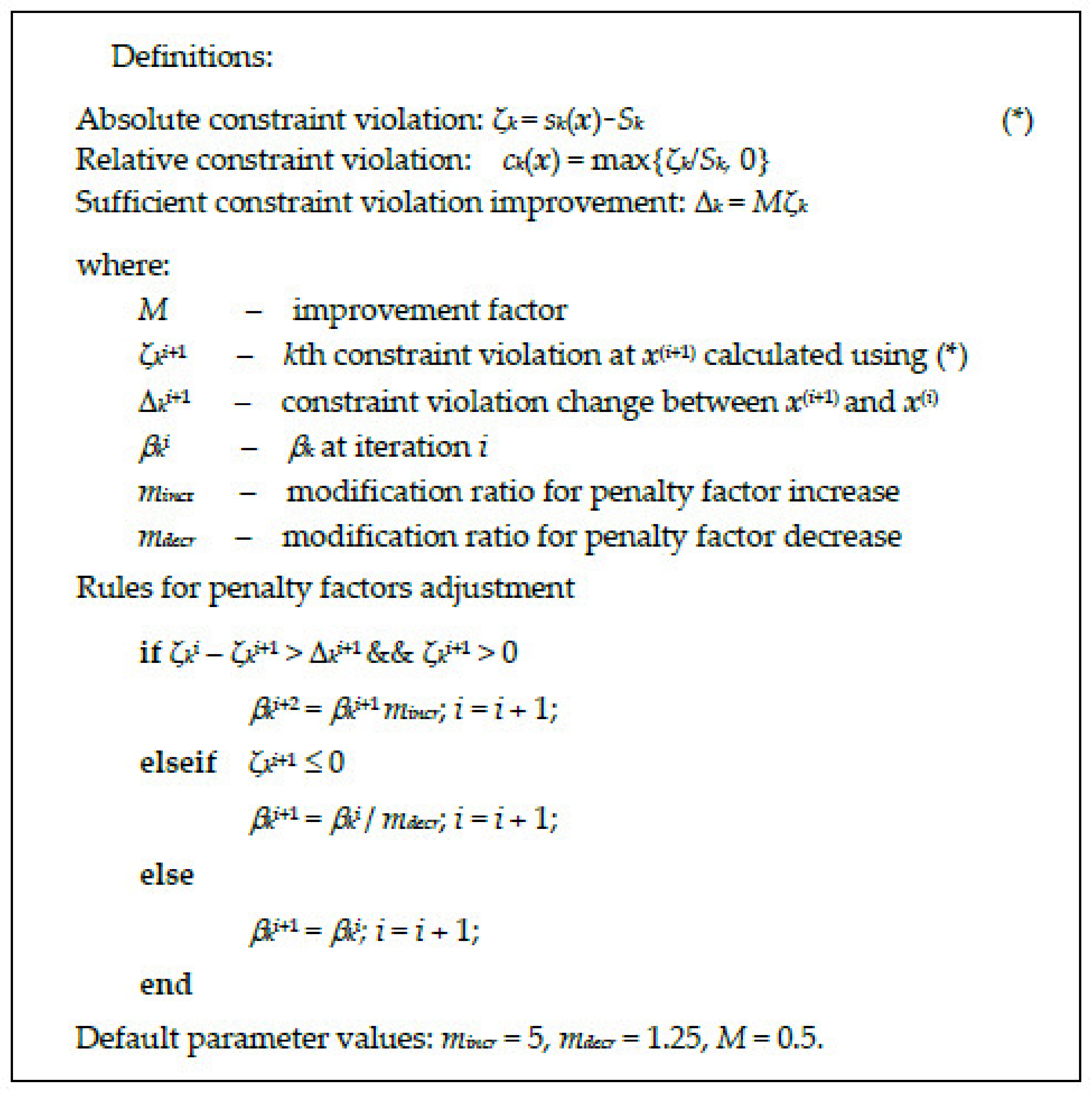
3.2. Adaptive Scheme II. Sufficient Constraint Violation Improvement
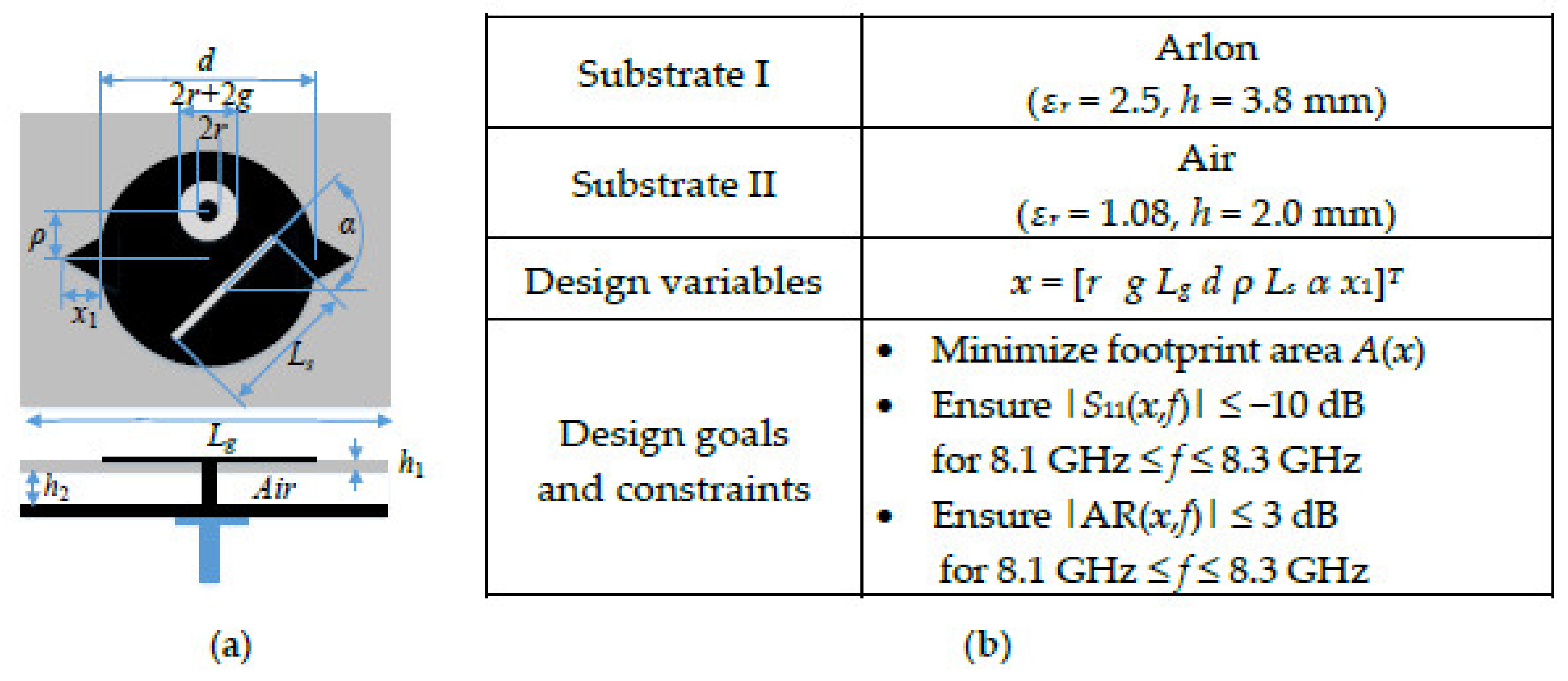
Example: Circular Patch Antenna
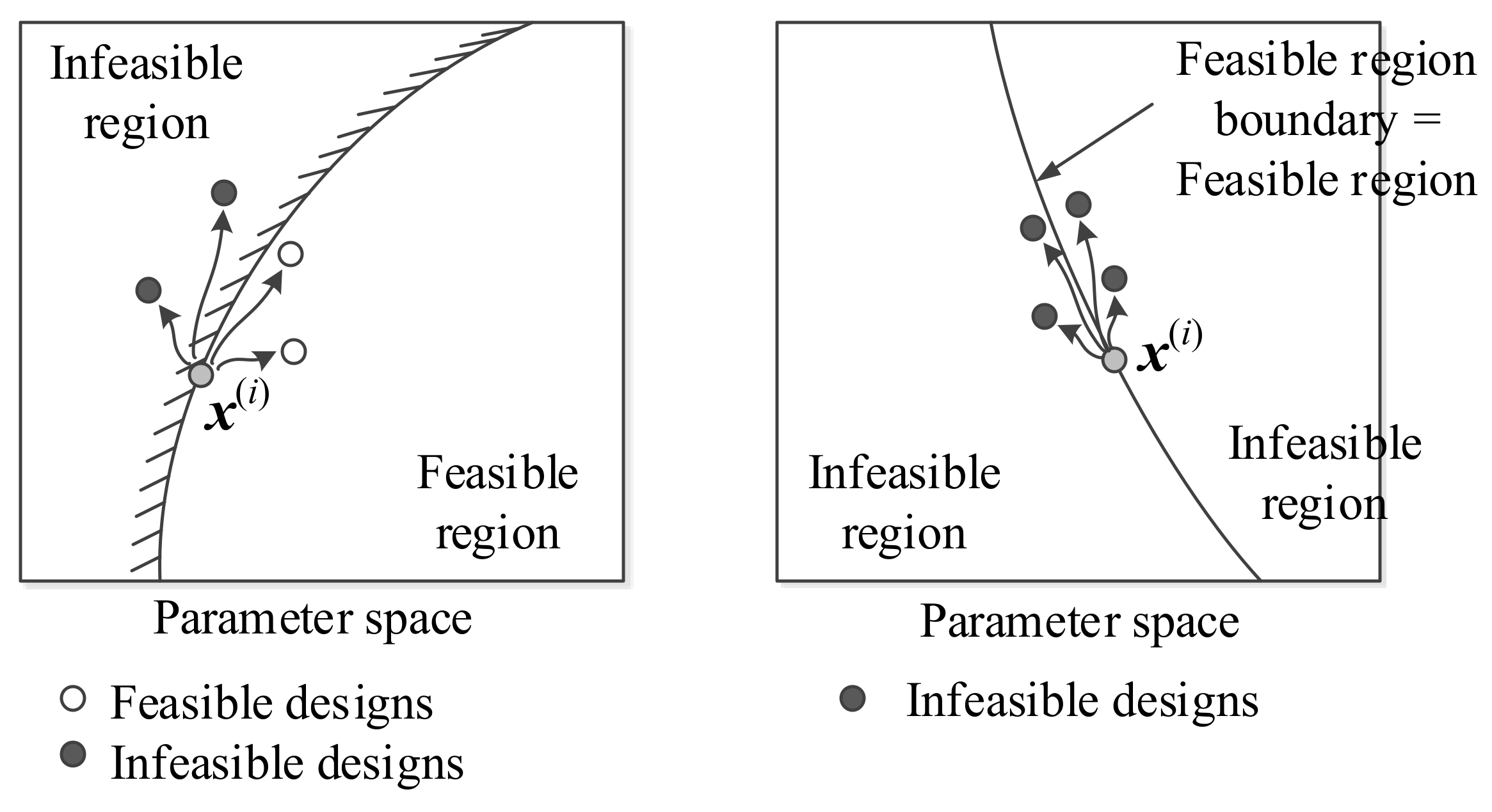
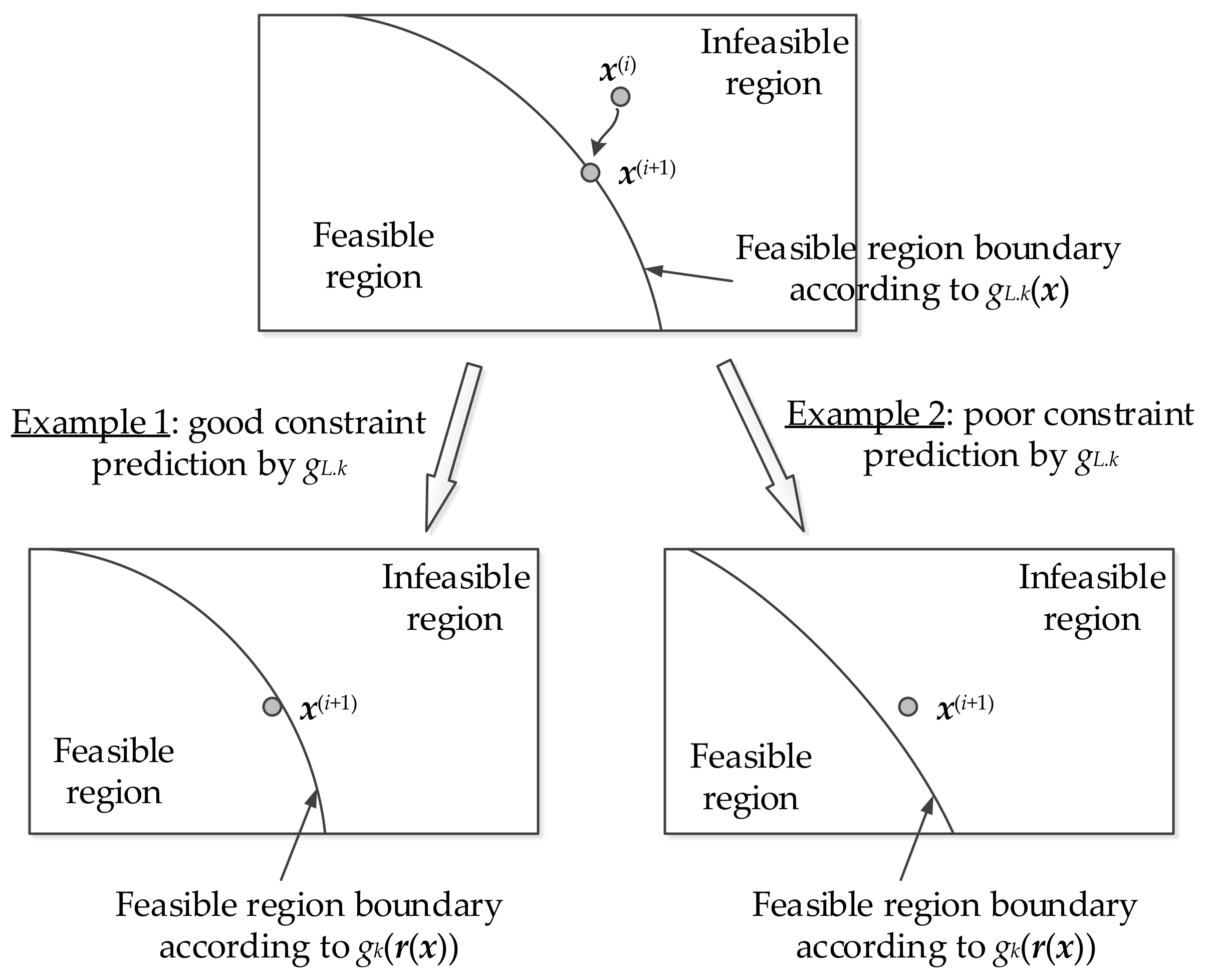
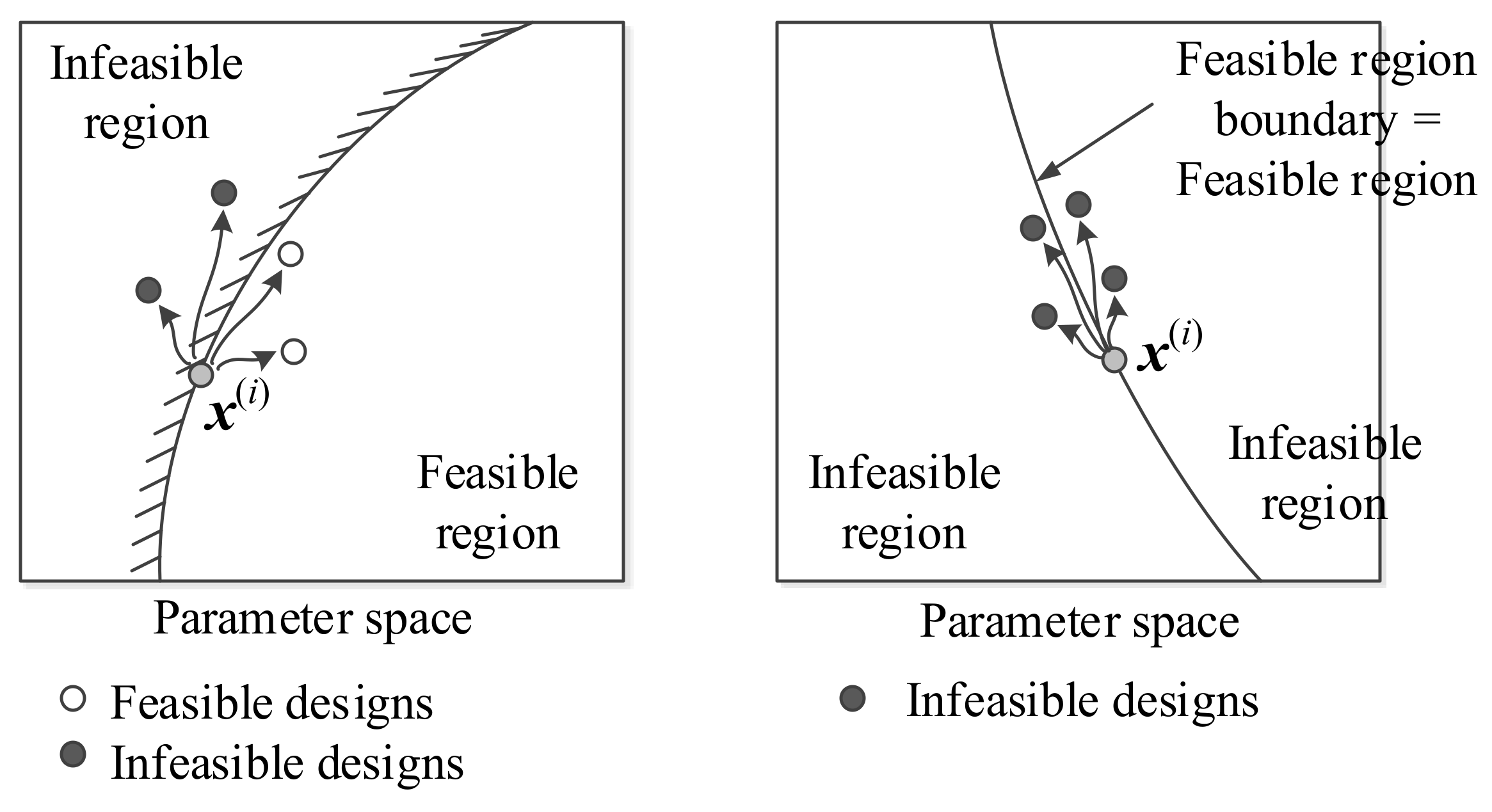
4. Explicit Constraint Handling Approach
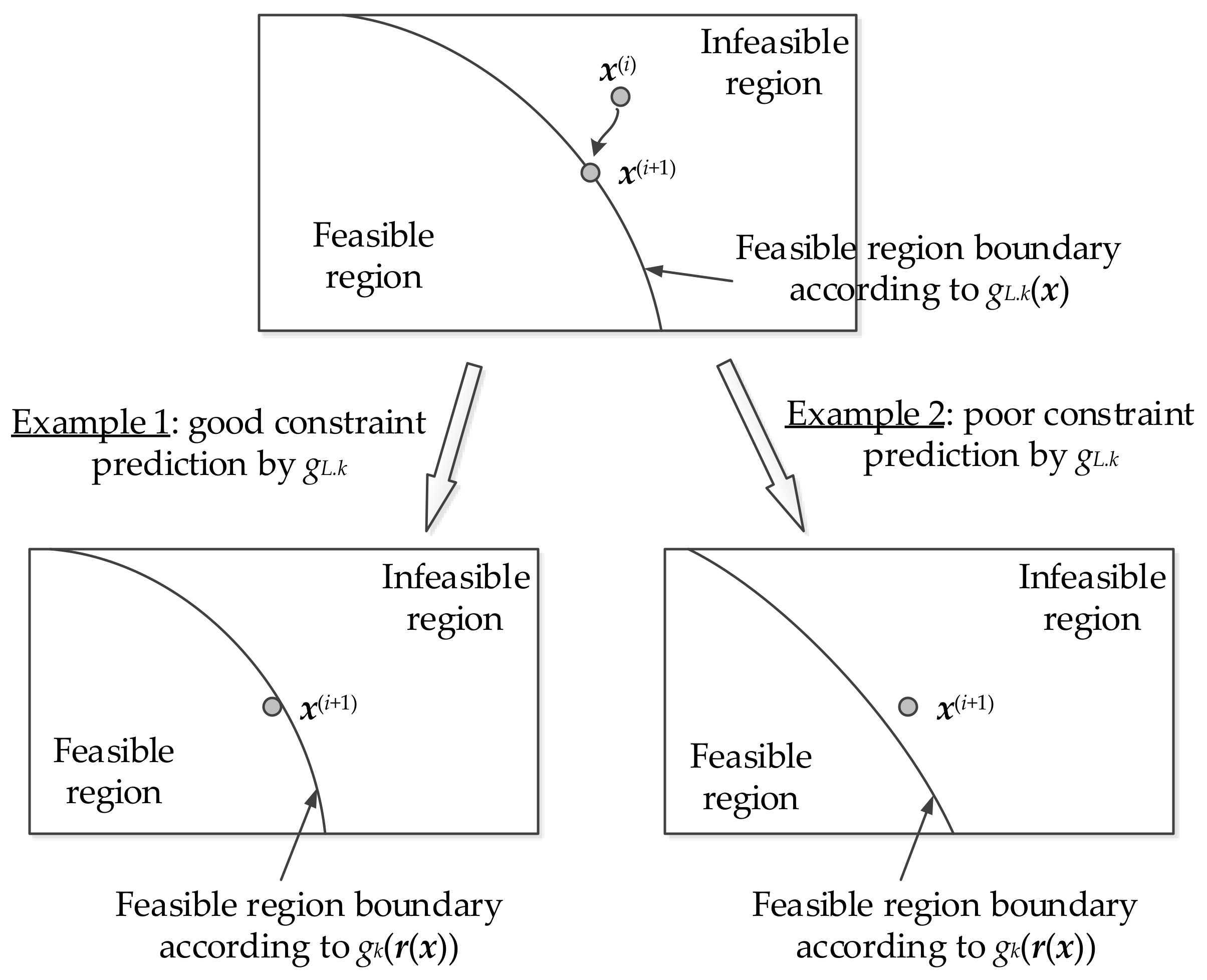
4.1. Explicit Constraint Handling
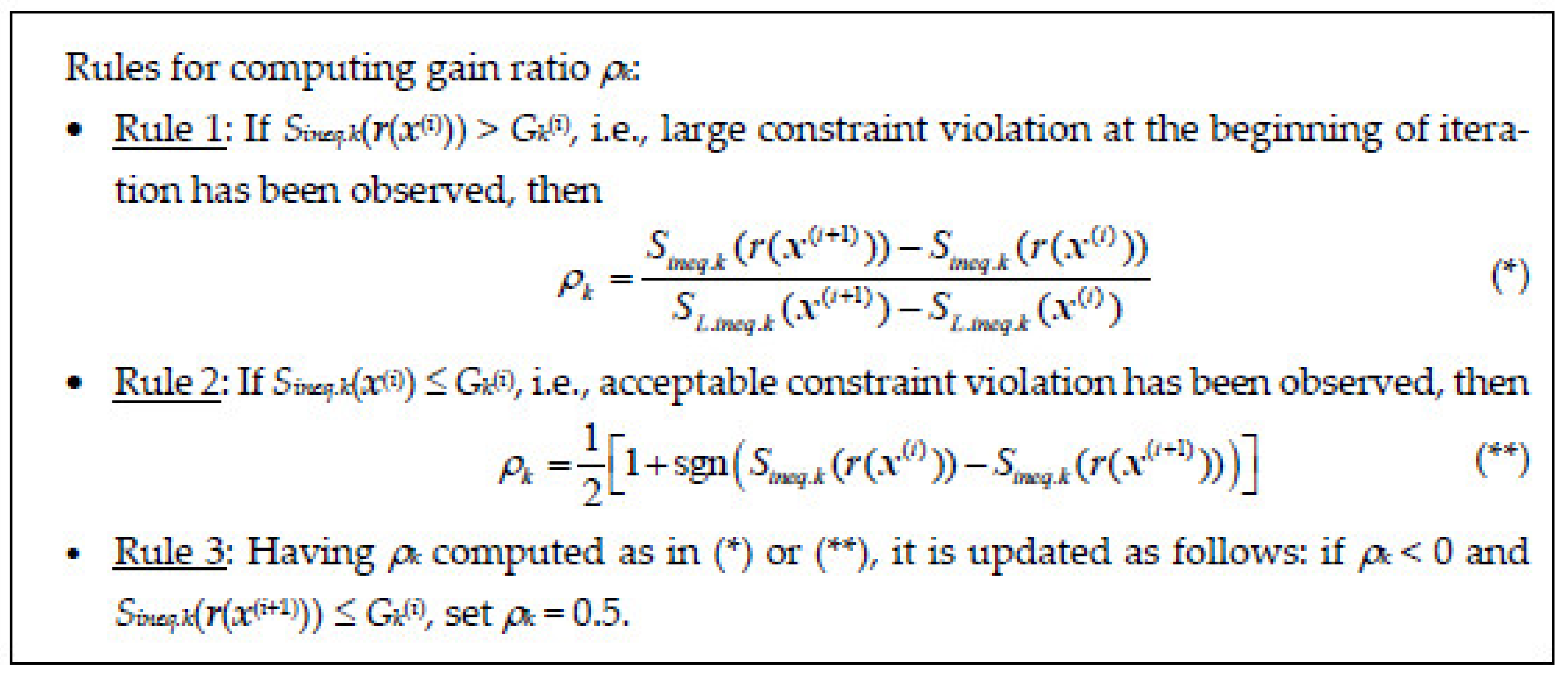
4.2. Calculating Gain Ratio
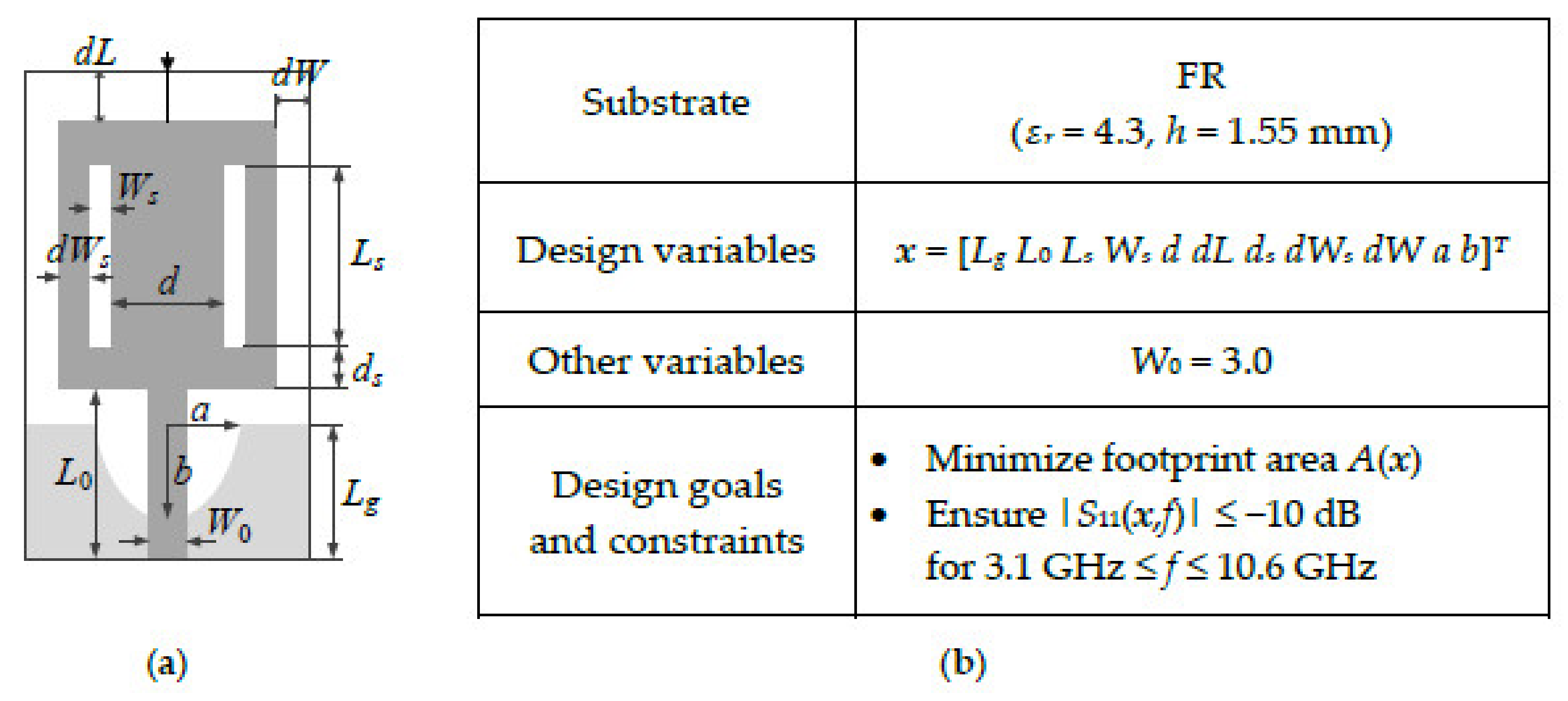
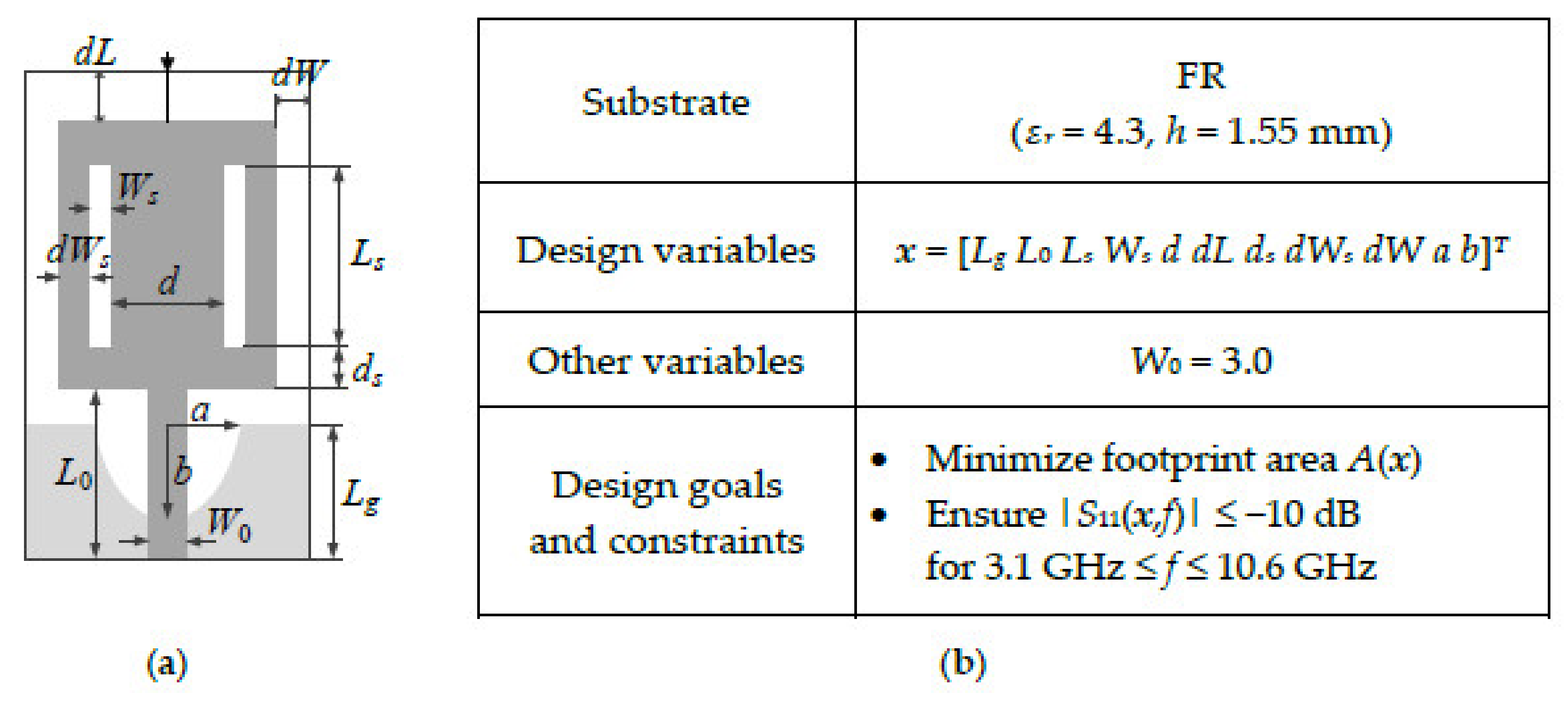
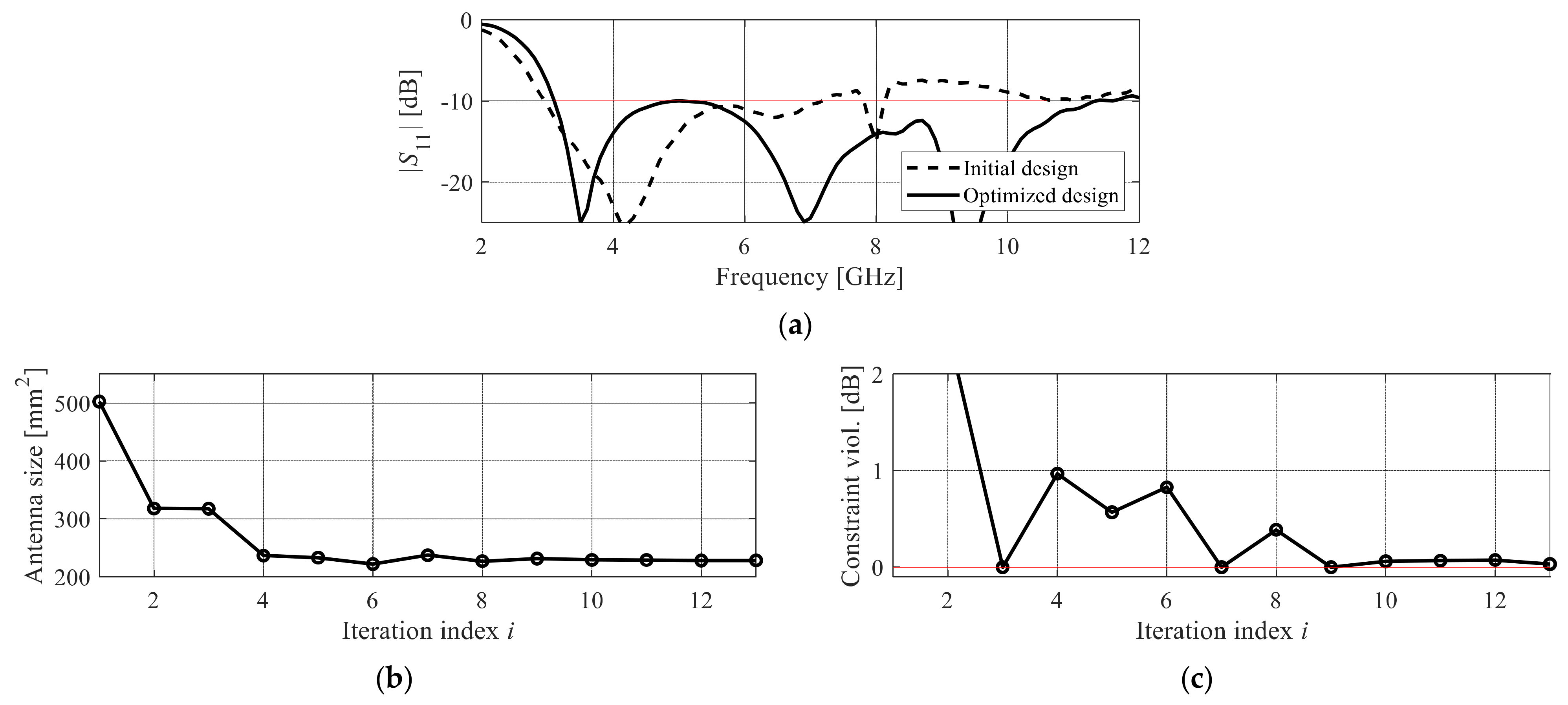
4.3. Example I: Broadband Antenna
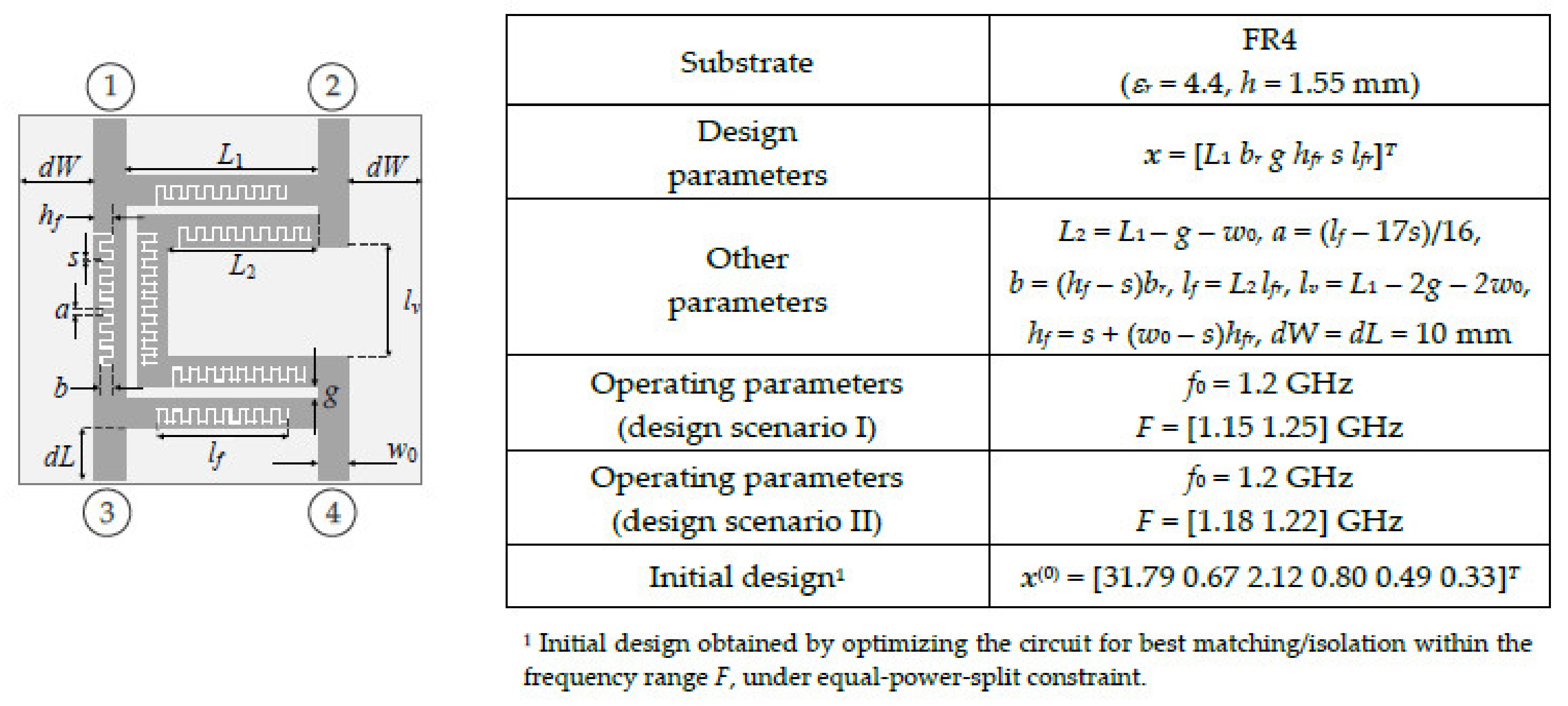
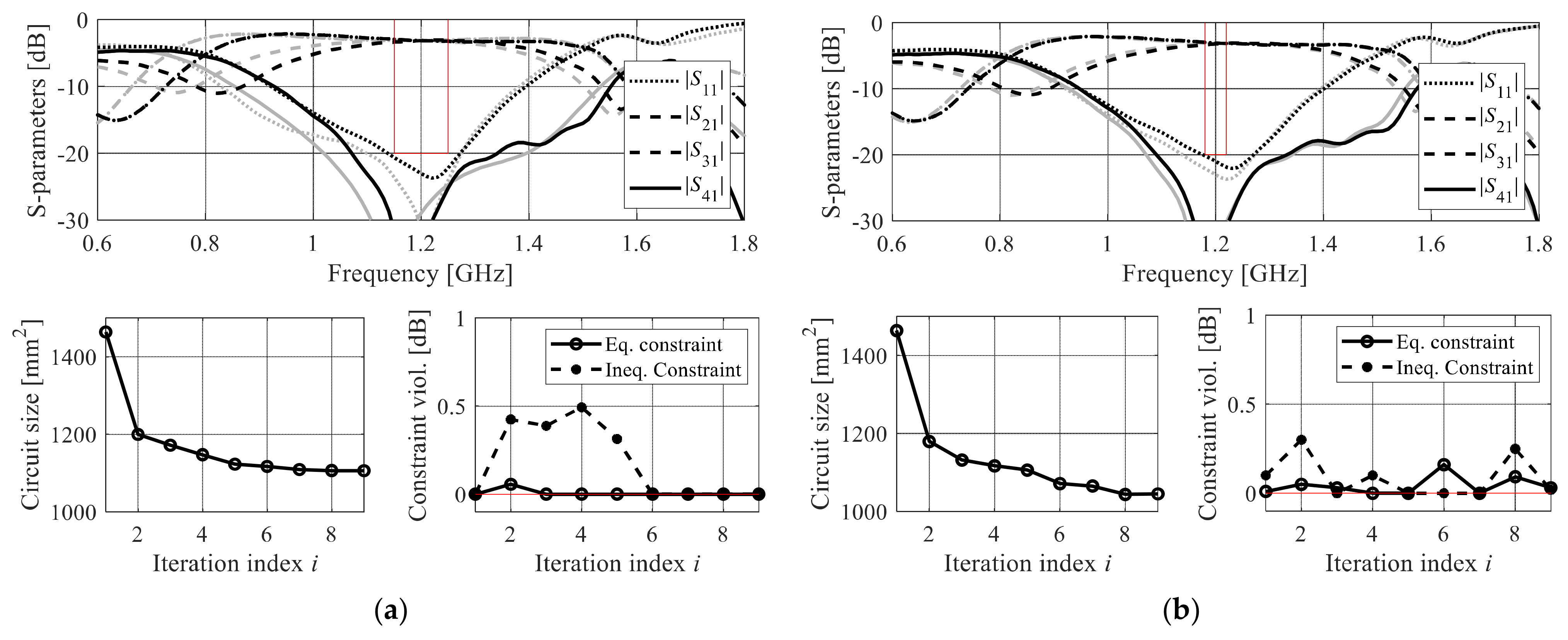
4.4. Example II: Rat-Race Coupler
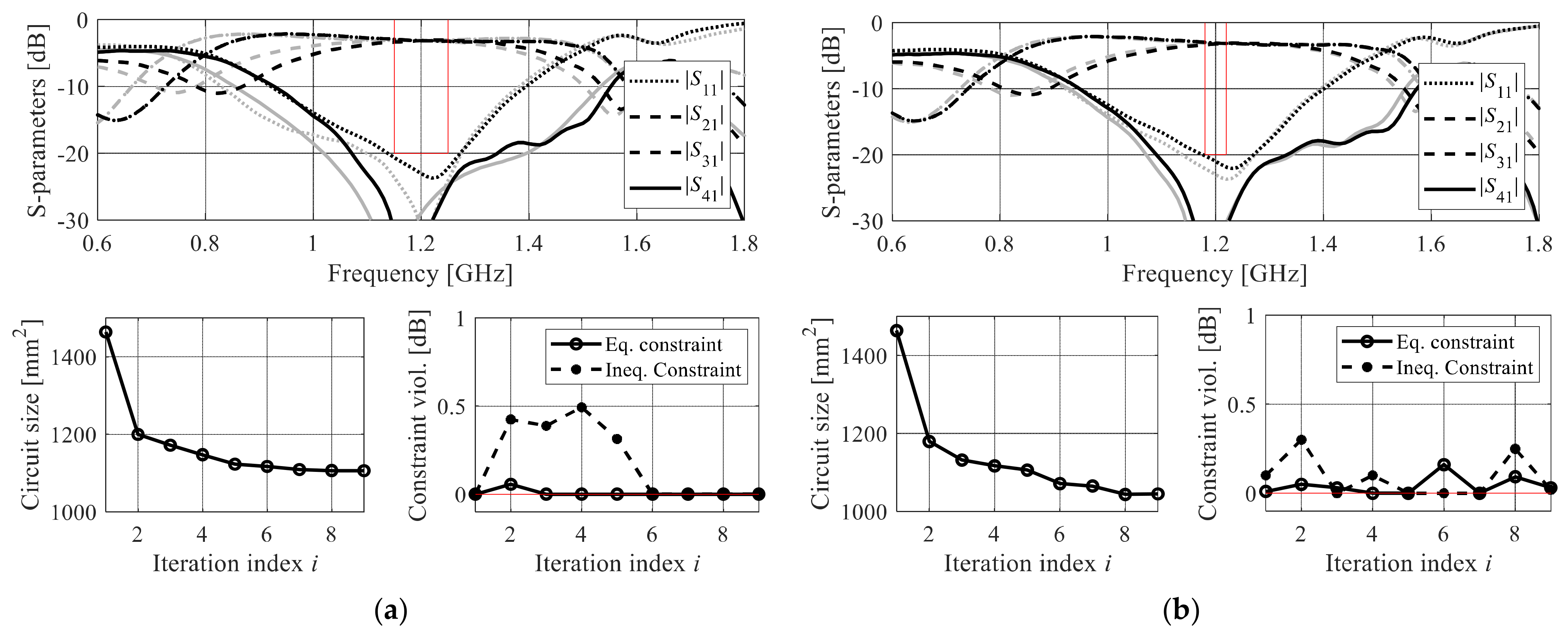
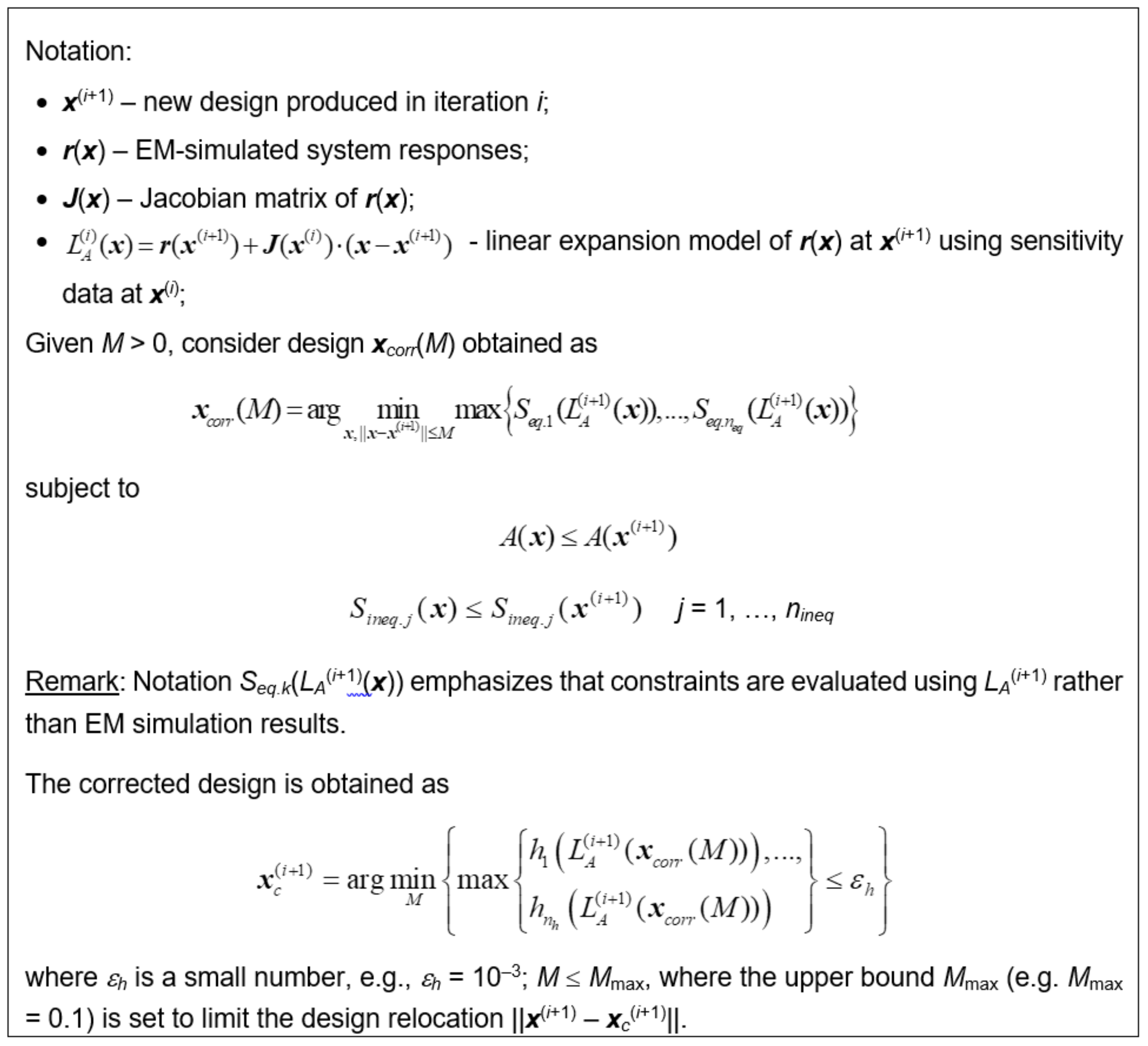
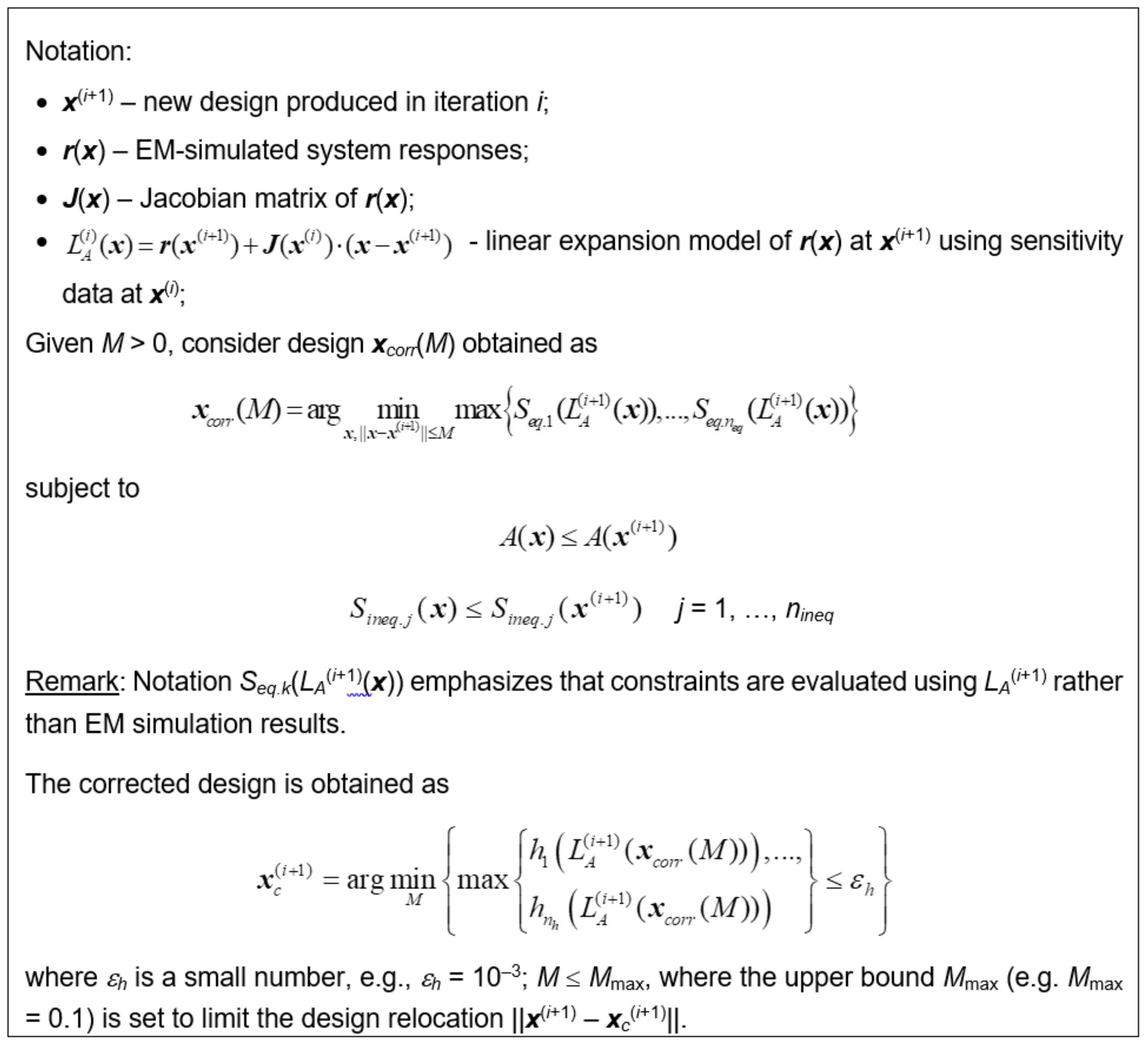
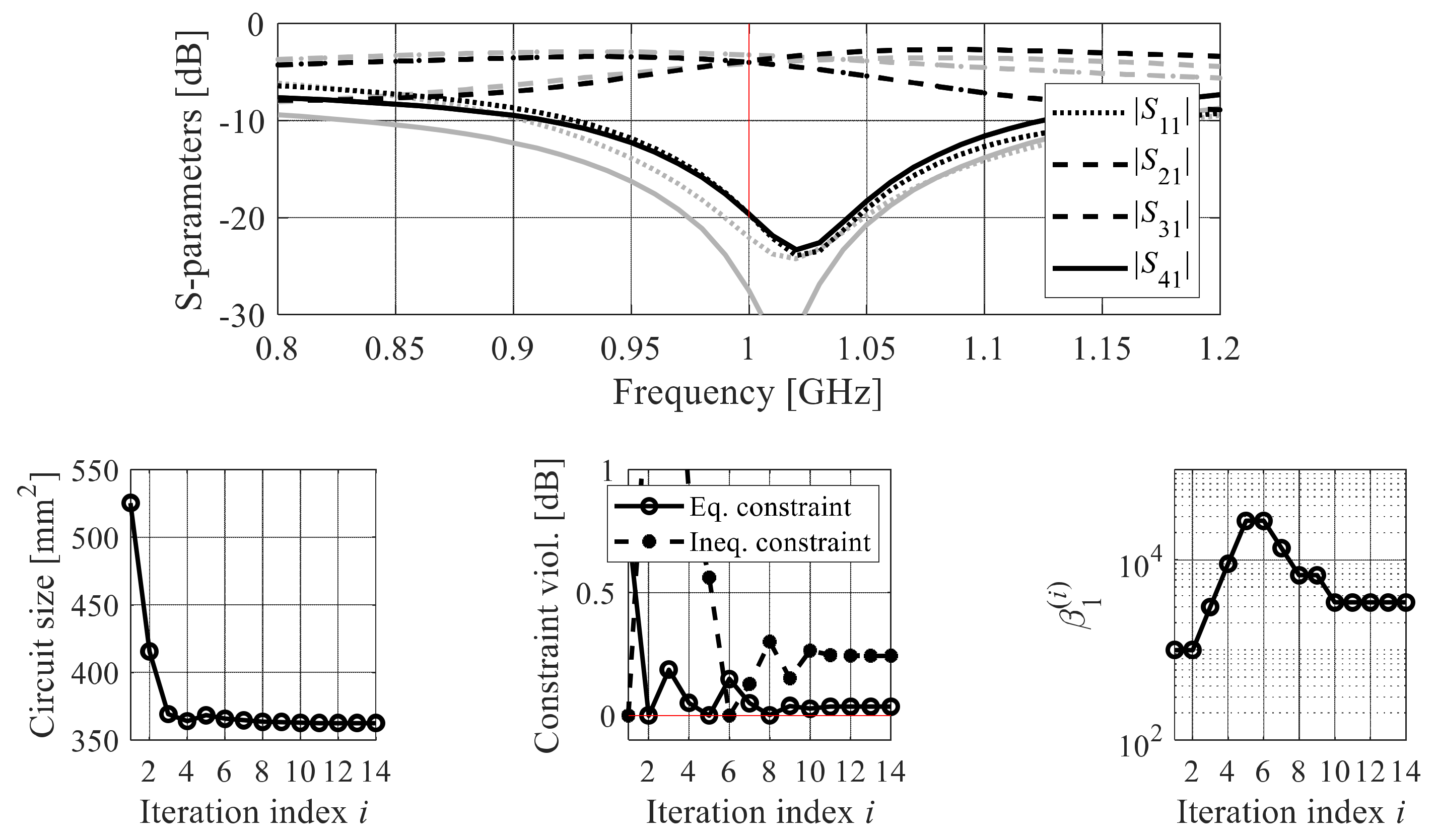
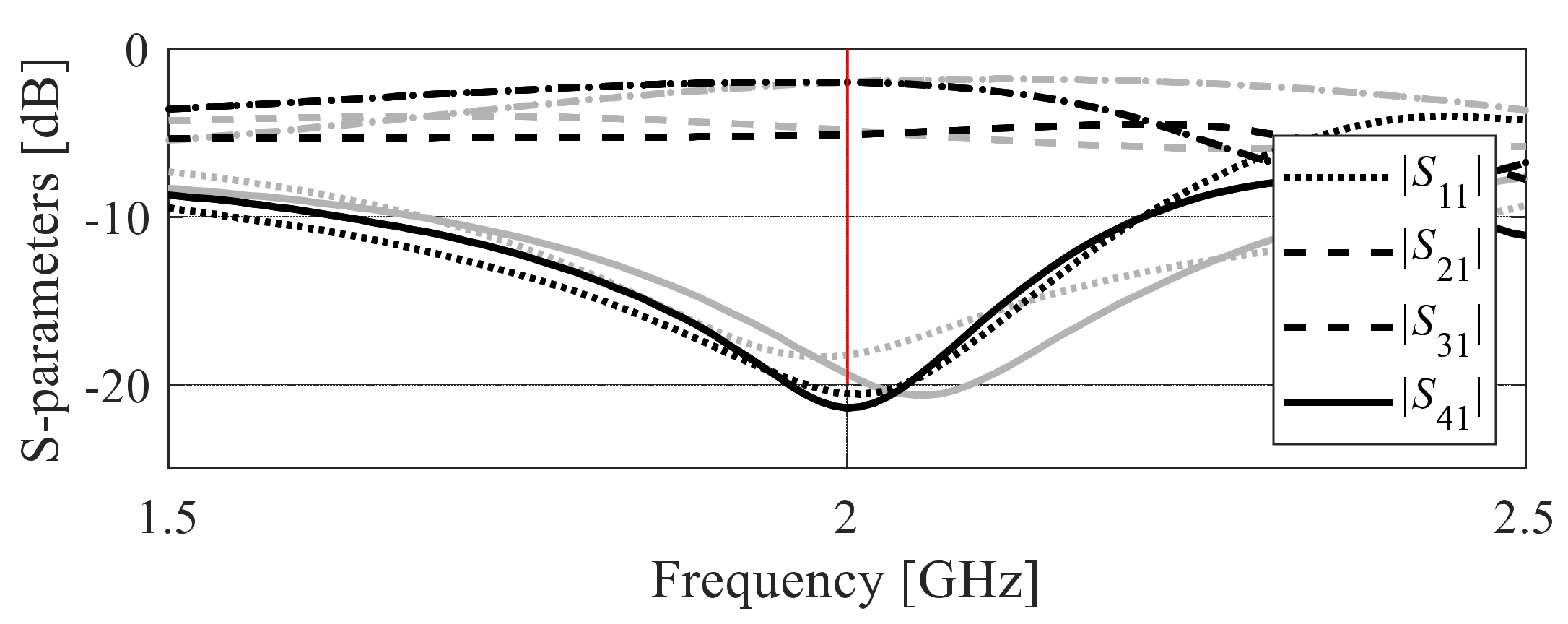
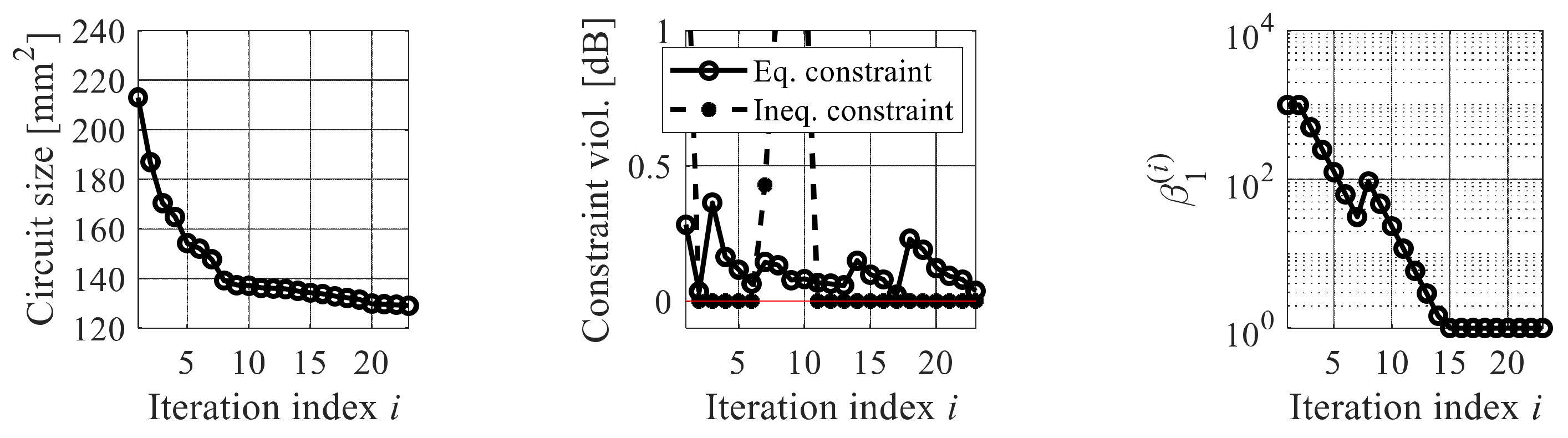
5. Equality Constraint Control through Optimization-Based Correction
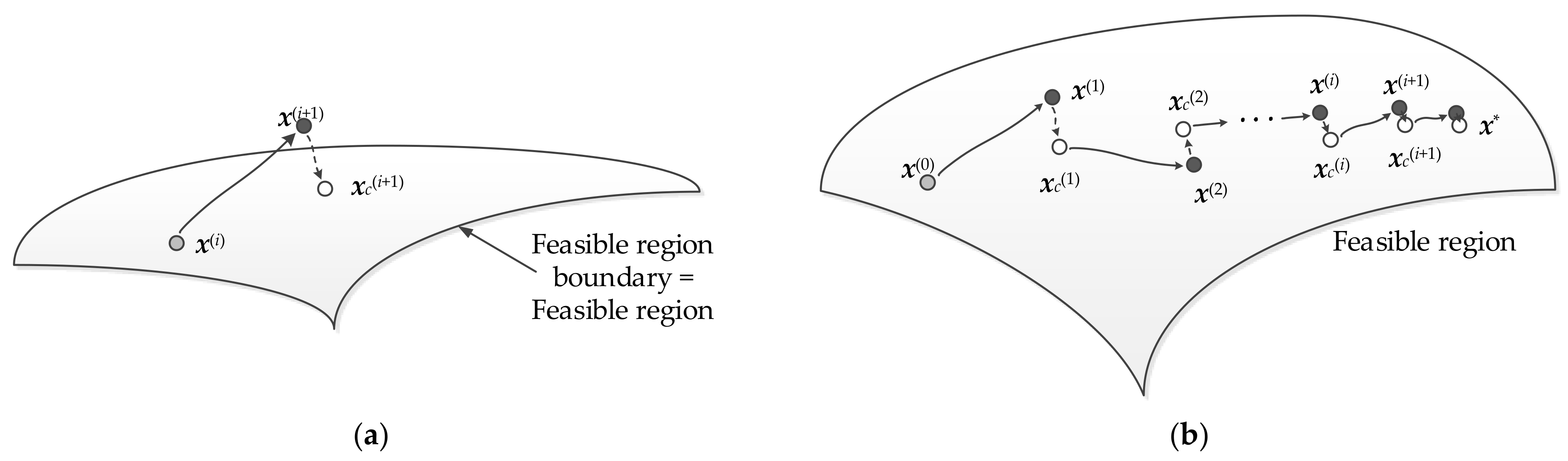
5.1. Correction Procedure
5.2. Illustration Examples
6. Expedited EM-Driven Size Reduction
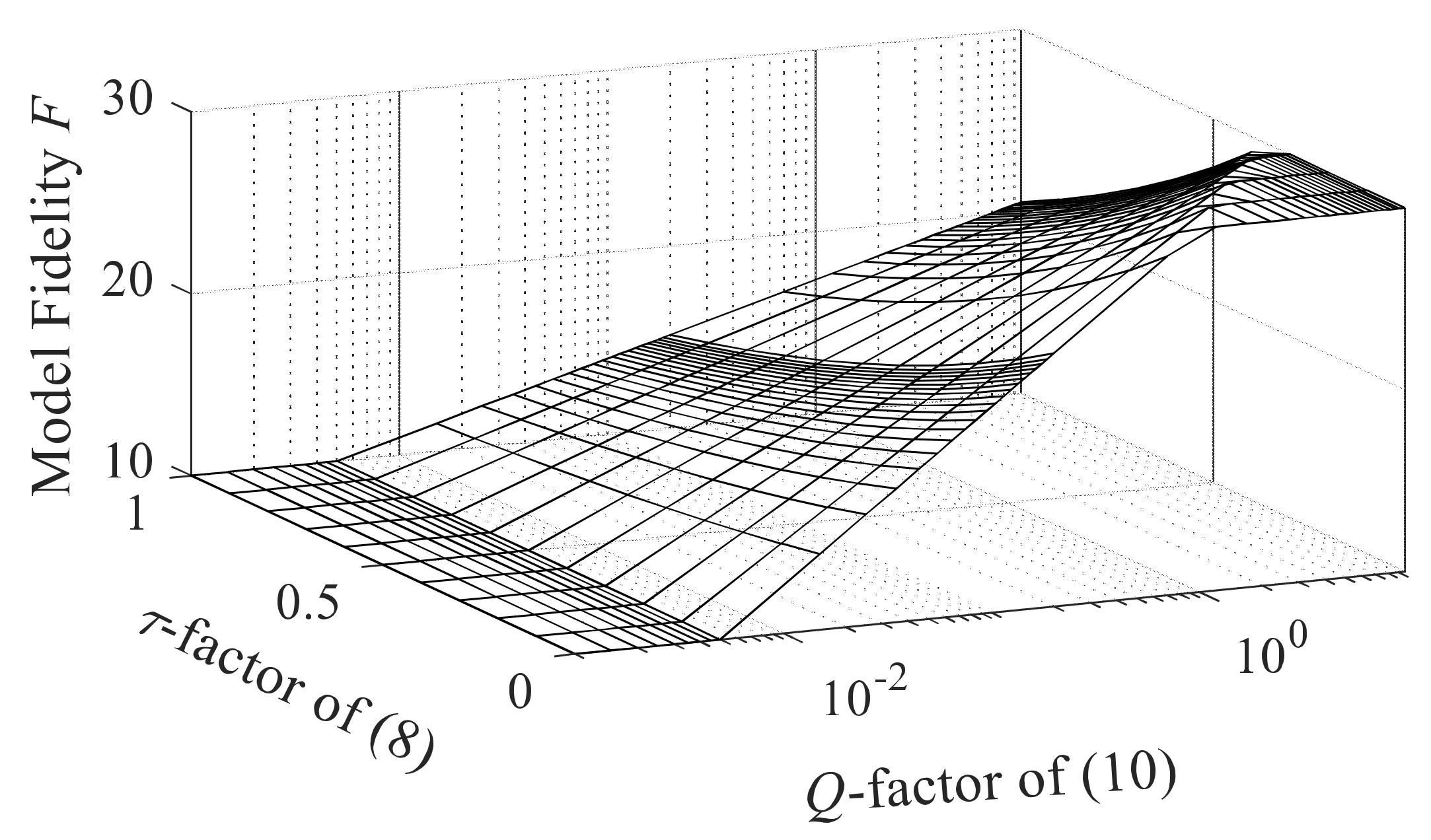
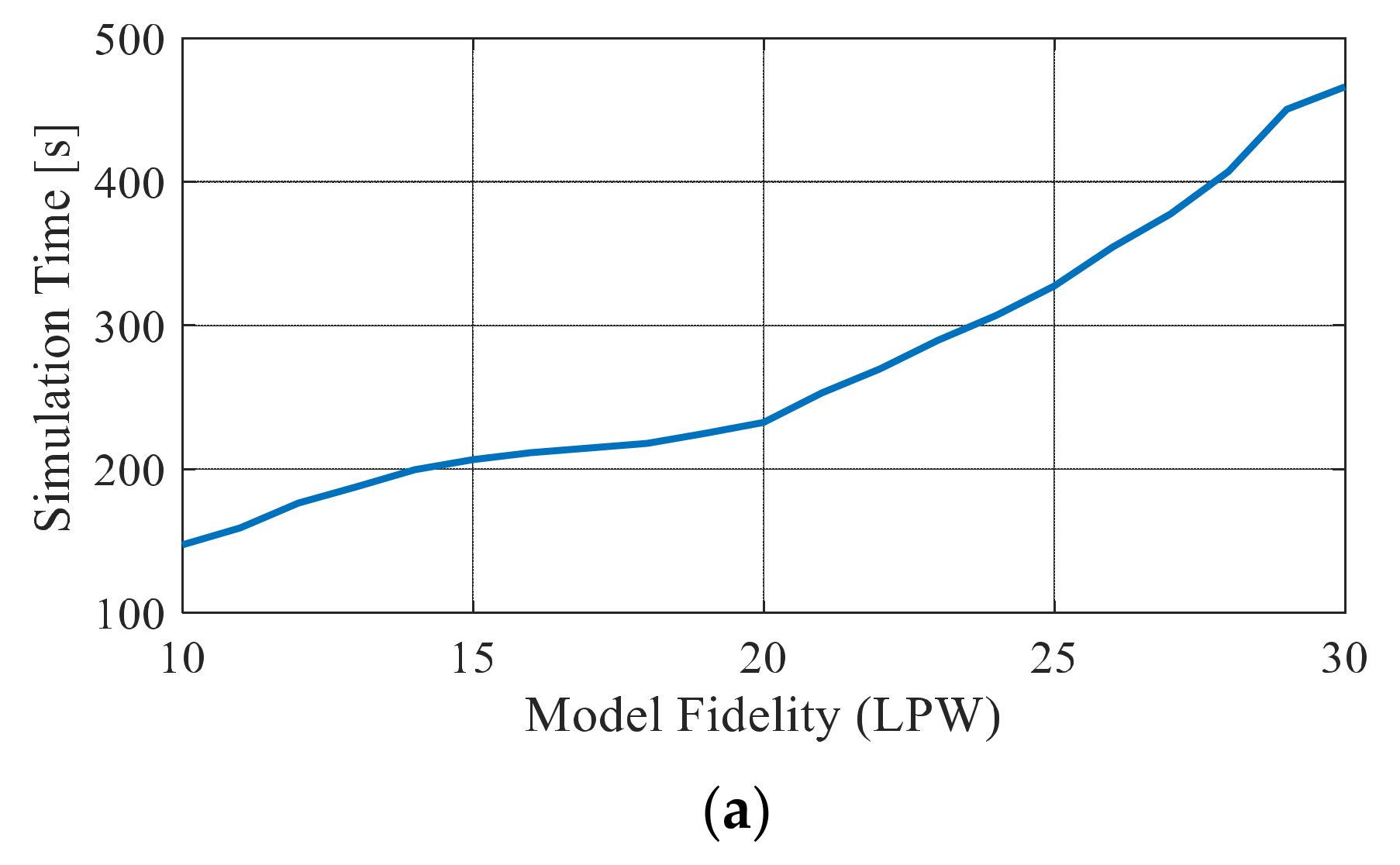
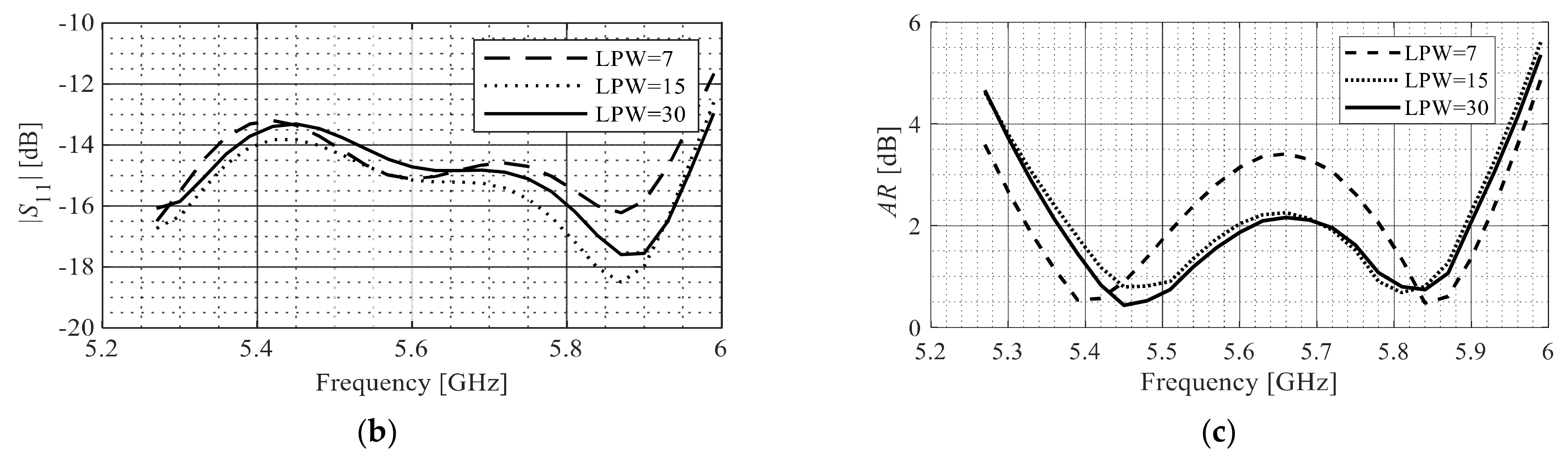
6.1. Variable-Fidelity EM Models
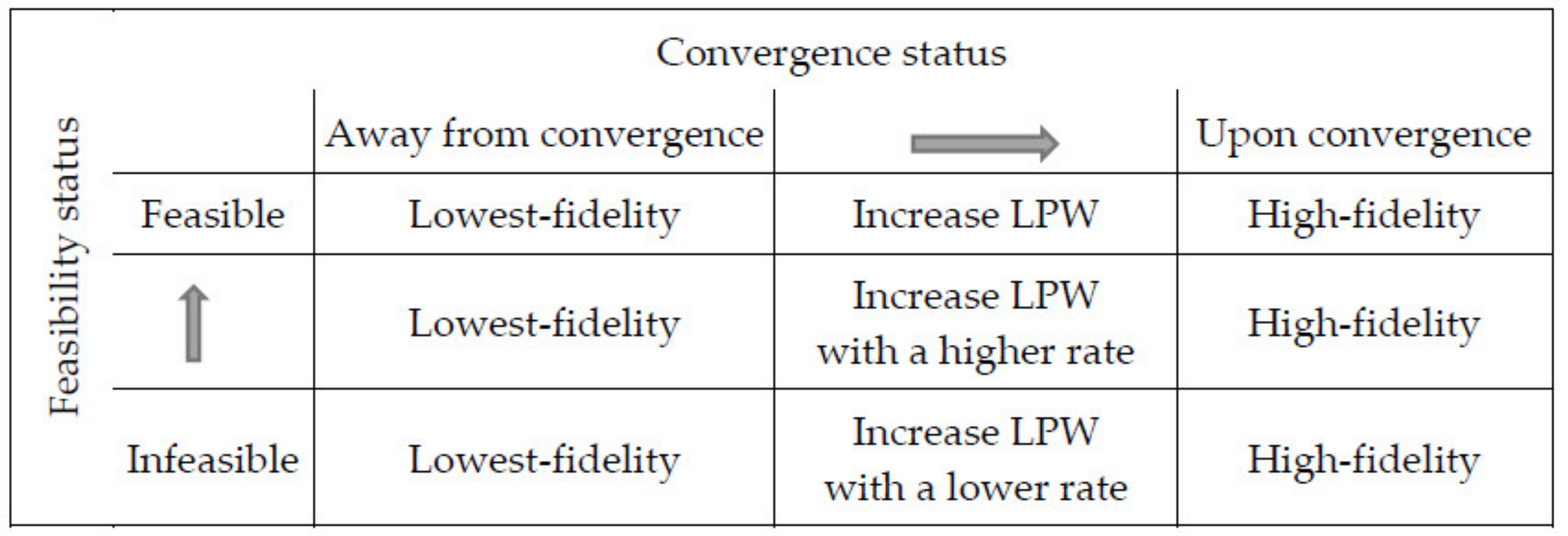
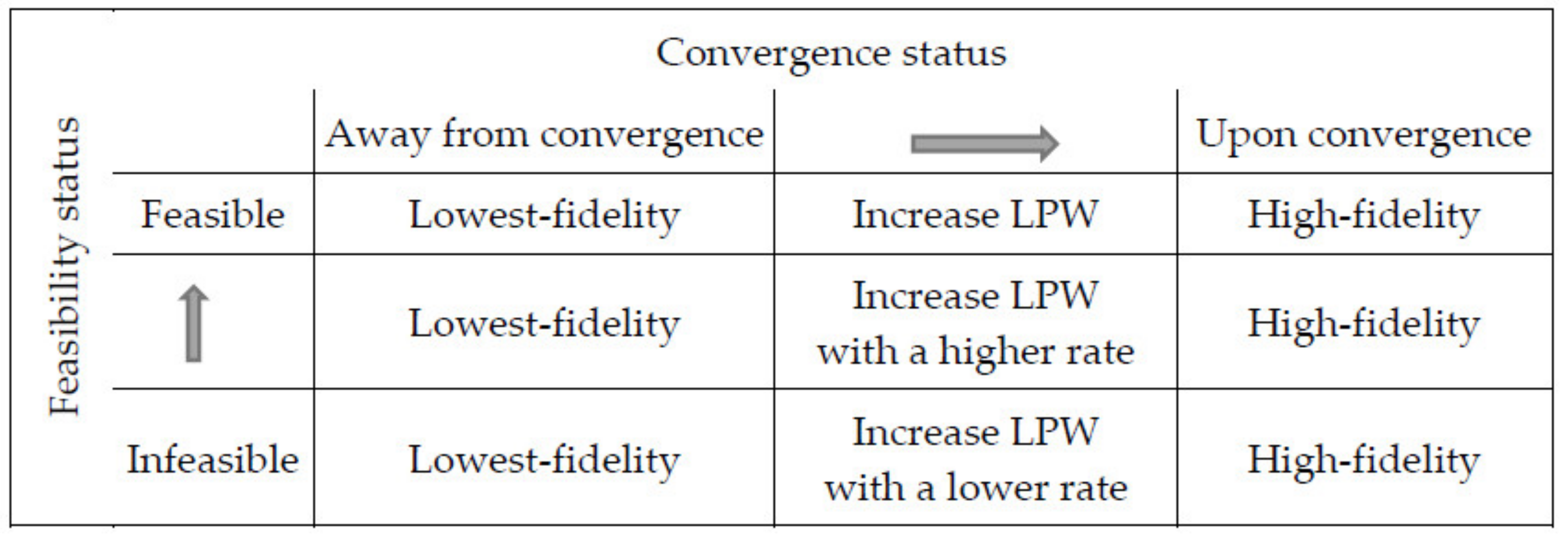
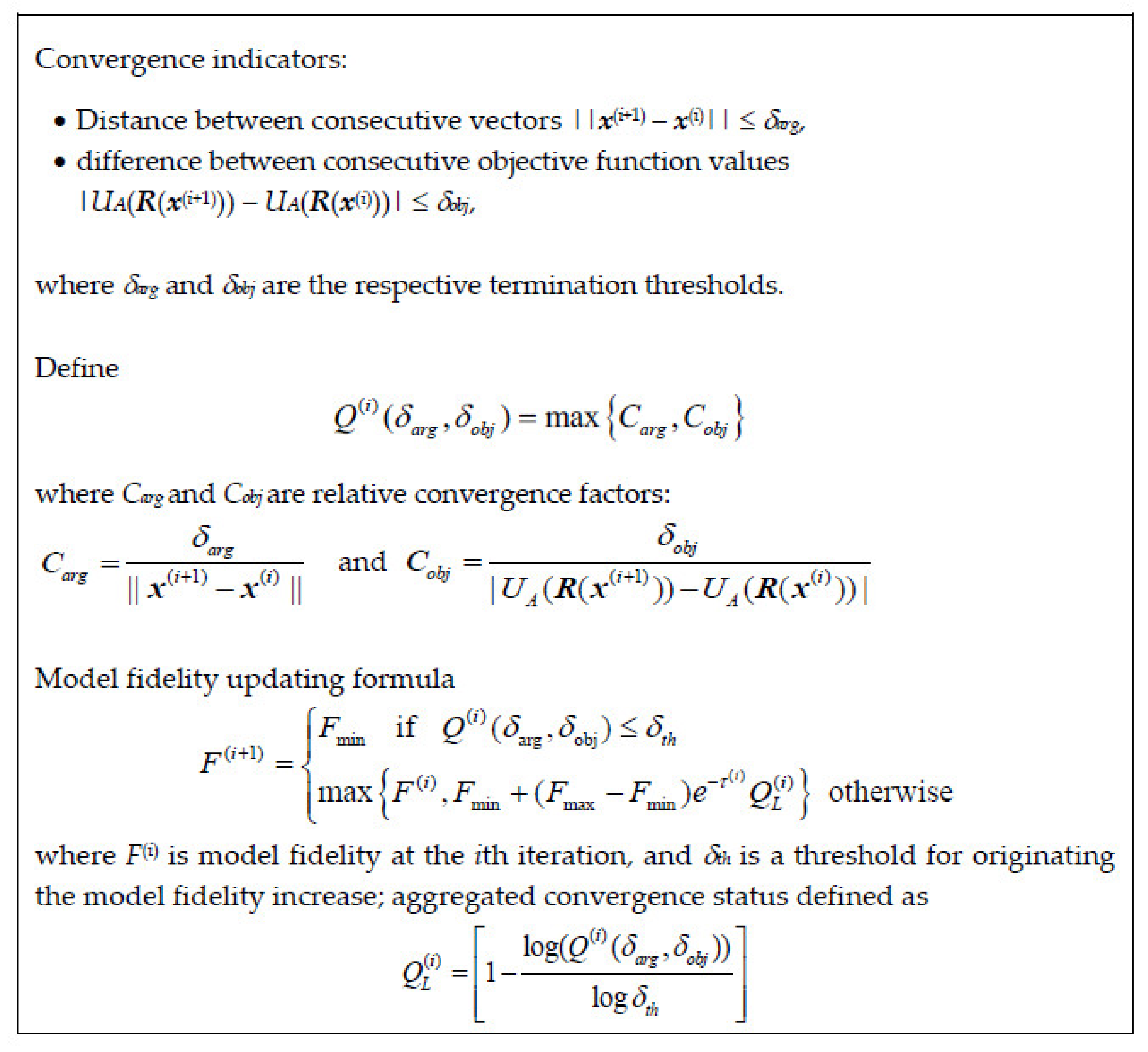
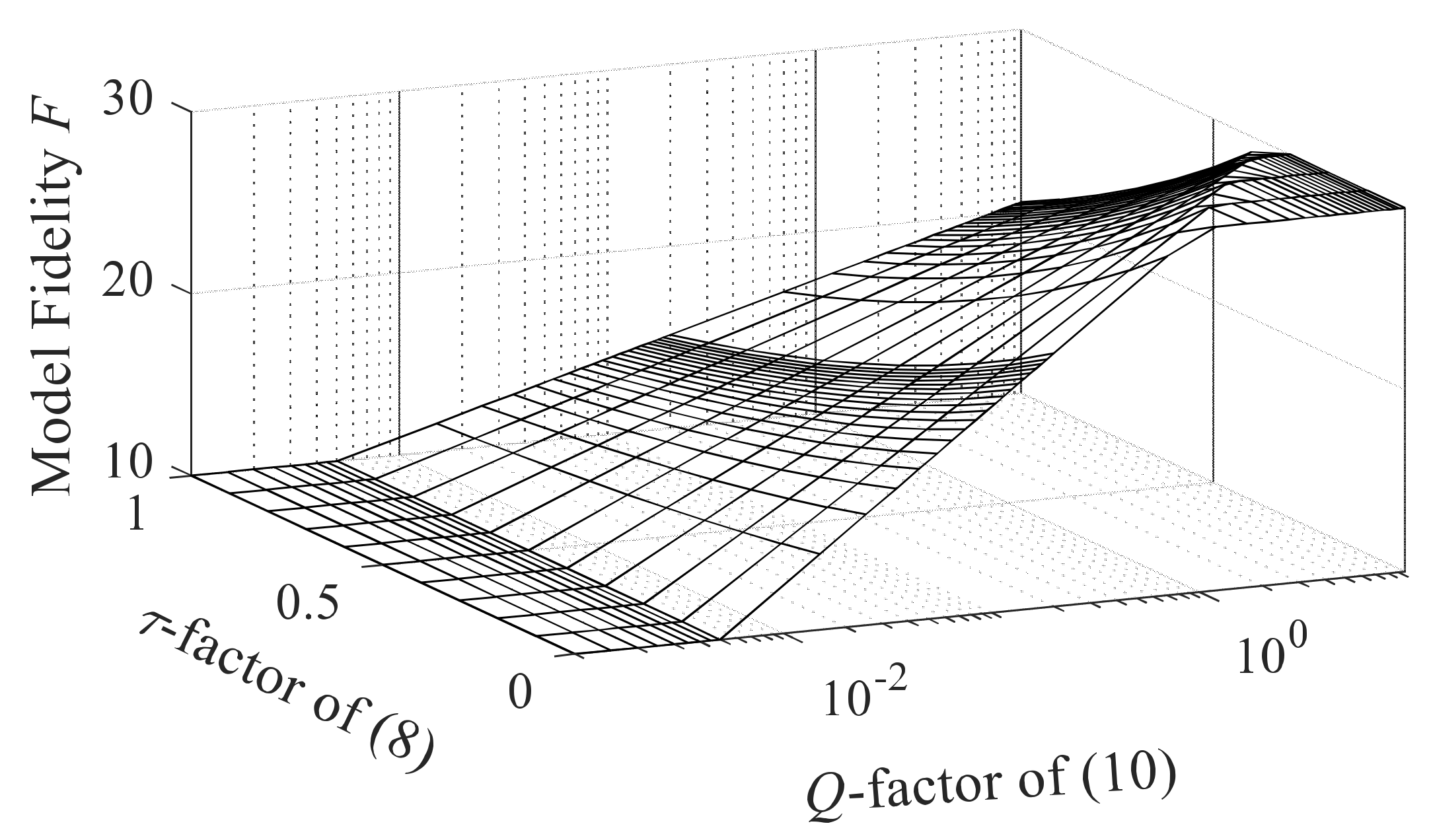
6.2. Model Management Scheme
- The fidelity is set to Fmin early in the optimization process, regardless of the solution feasibility;
- Fidelity is set to Fmax upon convergence for reliability reasons;
- In the intermediate phase (i.e., either between infeasible and feasible, or when reaching convergence), the model fidelity depends on both the feasibility and the convergence status.
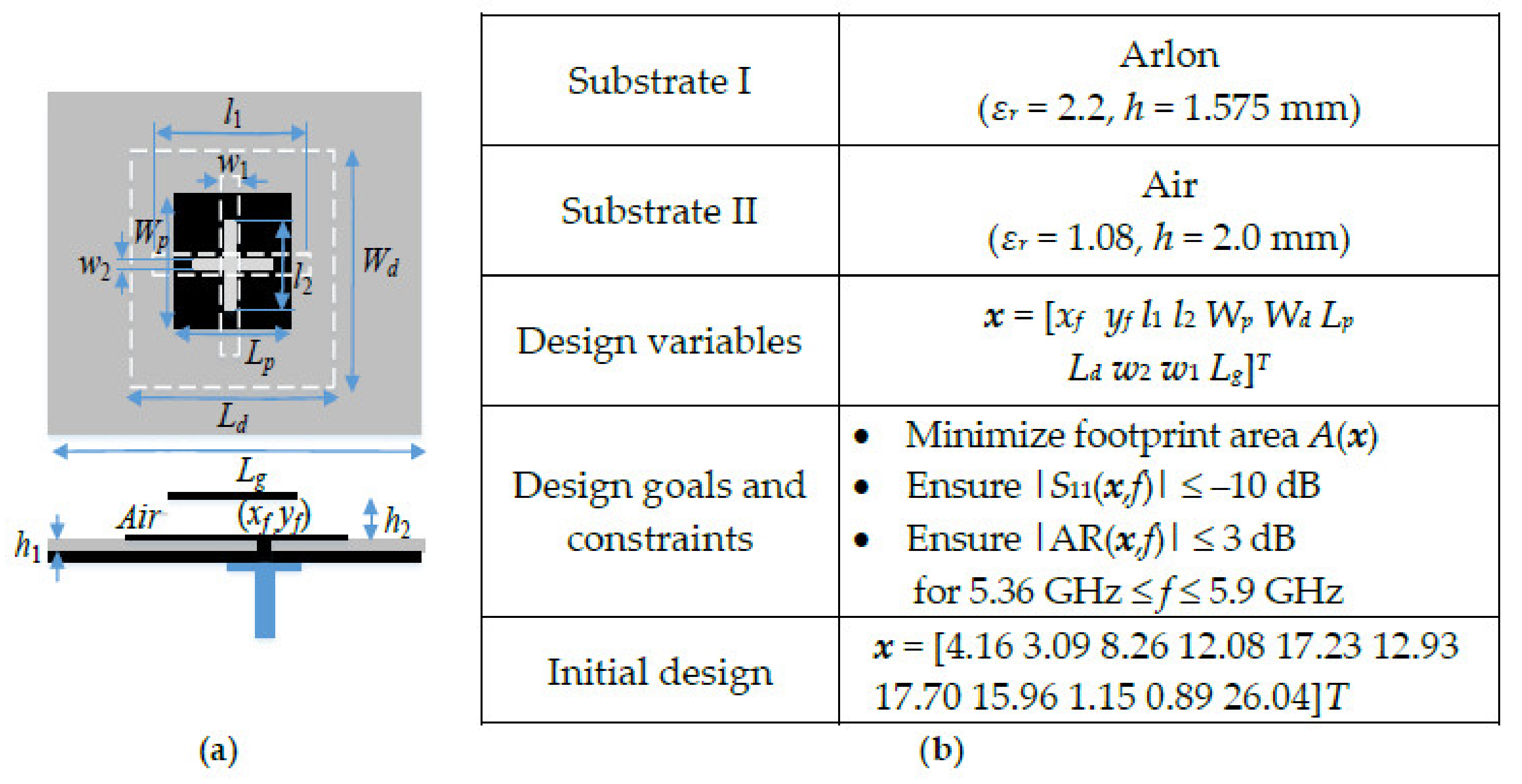
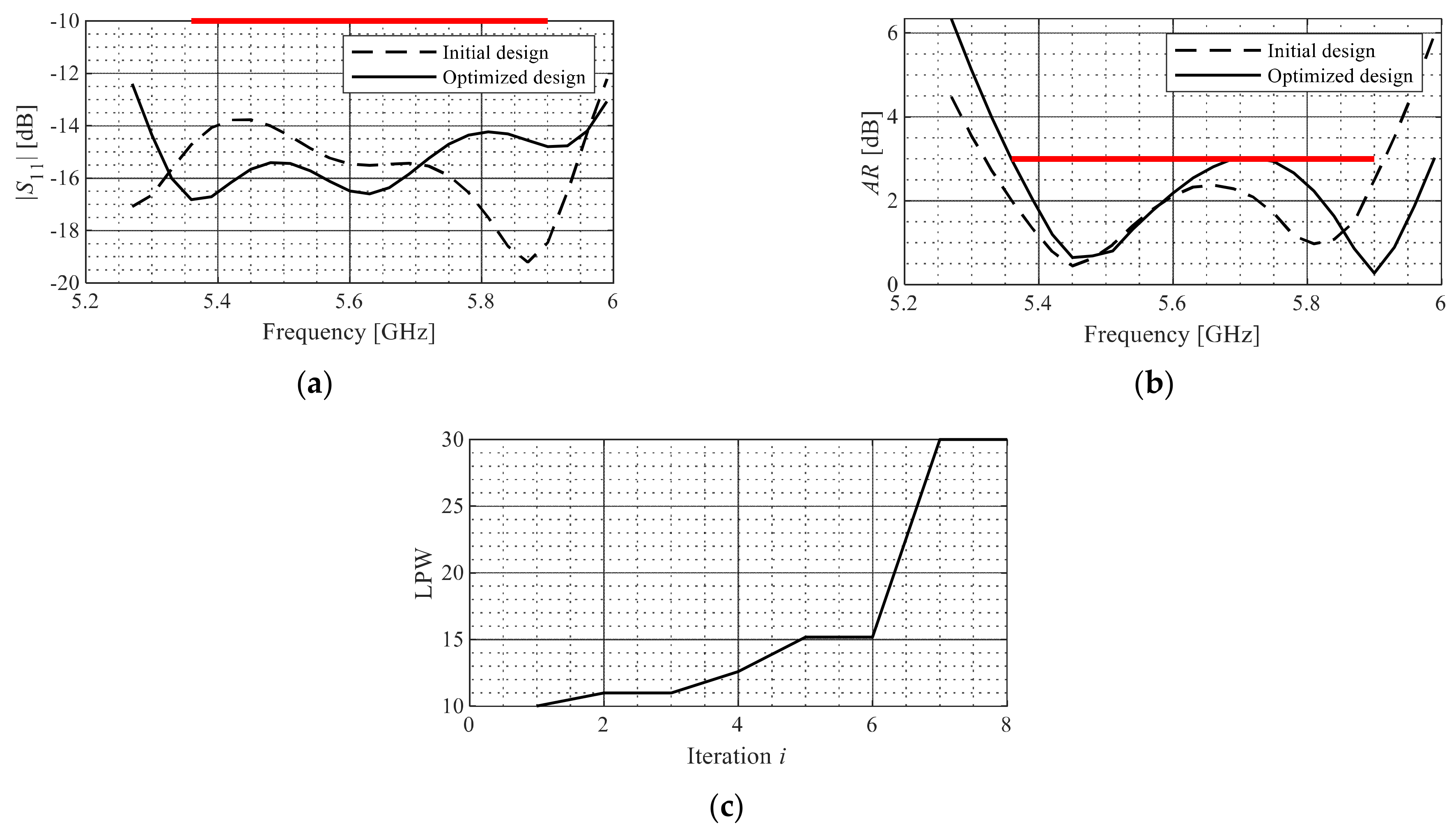
6.3. Illustration Example
7. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, Z.; Kim, E.-S.; Liang, J.-G.; Kim, N.-Y. QFN-packaged bandpass filter with intertwined circular spiral inductor and integrated center-located capacitors using integrated passive device technology. IEEE Access 2019, 7, 13597–13607. [Google Scholar] [CrossRef]
- Yin, X.; Zhu, Z.; Liu, Y.; Lu, Q.; Liu, X.; Yang, Y. Ultra-compact TSV-based L-C low-pass filter with stopband up to 40 GHz for microwave applications. IEEE Trans. Microw. Theory. Tech. 2019, 67, 738–745. [Google Scholar] [CrossRef]
- Su, S.-W.; Lee, C.-T.; Hsiao, Y.-W. Compact two-inverted-F-antenna system with highly integrated π-shaped decoupling structure. IEEE Trans. Antennas Propag. 2019, 67, 6182–6186. [Google Scholar] [CrossRef]
- Byeon, C.W.; Park, C.S. Low-loss compact millimeter-wave power divider/combiner for phased array systems. IEEE Microw. Wirel. Compon. Lett. 2019, 29, 312–314. [Google Scholar] [CrossRef]
- Piekarz, I.; Sorocki, J.; Smolarz, R.; Gruszczynski, S.; Wincza, K. Four-node antenna feeding network for interfacing with differential front-end electronics. IEEE Access 2021, 9, 103728–103736. [Google Scholar] [CrossRef]
- Choudhary, D.K.; Chaudhary, R.K. Compact lowpass and dual-band bandpass filter with controllable transmission zero/center frequencies/passband bandwidth. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 1044–1048. [Google Scholar] [CrossRef]
- Shen, G.; Che, W.; Xue, Q.; Yang, W. Characteristics of dual composite right/left-handed unit cell and its applications to bandpass filter design. IEEE Trans. Circuits Syst. II Exp. Briefs 2018, 65, 719–723. [Google Scholar] [CrossRef]
- Li, Z.; Wu, K.-L. Direct synthesis and design of wideband bandpass filter with composite series and shunt resonators. IEEE Trans. Microw. Theory Tech. 2017, 65, 3789–3800. [Google Scholar] [CrossRef]
- Chi, J.-G.; Kom, Y.-J. A compact wideband millimeter-wave quadrature hybrid coupler using artificial transmission lines on a glass substrate. IEEE Microw. Wirel. Compon. Lett. 2020, 30, 1037–1040. [Google Scholar] [CrossRef]
- Kim, D.-M.; Min, B.-W.; Yook, J.-M. Compact mm-wave bandpass filters using silicon integrated passive device technology. IEEE Microw. Wirel. Compon. Lett. 2019, 29, 638–640. [Google Scholar] [CrossRef]
- Hagag, M.F.; Abu Khater, M.; Sinanis, M.D.; Peroulis, D. Ultra-compact tunable filtering rat-race coupler based on a half-mode SIW evanescent-mode cavity resonator. IEEE Trans. Microw. Theory Tech. 2018, 66, 5563–5572. [Google Scholar] [CrossRef]
- Hagag, M.F.; Peroulis, D. A compact tunable filtering rat-race coupler. In Proceedings of the 2018 IEEE/MTT-S International Microwave Symposium-IMS, Philadephia, PA, USA, 10–15 June 2018; pp. 1118–1121. [Google Scholar]
- Lin, Y.-S.; Liu, Y.-R.; Chan, C.-H. Novel miniature dual-band rat-race coupler with arbitrary power division ratios using differential bridged-T coils. IEEE Trans. Microw. Theory Tech. 2021, 69, 590–602. [Google Scholar] [CrossRef]
- Liu, Y.-R.; Chan, C.-H.; Lin, Y.-S. Miniature wideband rat-race coupler in silicon-based integrated passive device technology. In Proceedings of the 2020 IEEE/MTT-S International Microwave Symposium (IMS), Loas Angeles, CA, USA, 4–6 August 2020; pp. 727–730. [Google Scholar]
- Koziel, S.; Pietrenko Dabrowska, A. Performance-based nested surrogate modeling of antenna input characteristics. IEEE Trans. Antennas Propag. 2019, 67, 2904–2912. [Google Scholar] [CrossRef]
- Song, Y.; Cheng, Q.S.; Koziel, S. Multi-fidelity local surrogate model for computationally efficient microwave component design optimization. Sensors 2019, 19, 3023. [Google Scholar] [CrossRef] [PubMed]
- Koziel, S.; Pietrenko Dabrowska, A. Design-oriented modeling of antenna structures by means of two-level kriging with explicit dimensionality reduction. AEU-Int. J. Electron. Comm. 2020, 127, 153466. [Google Scholar] [CrossRef]
- Pietrenko-Dabrowska, A.; Koziel, S. Antenna modeling using variable-fidelity EM simulations and constrained co-kriging. IEEE Access 2020, 8, 91048–91056. [Google Scholar] [CrossRef]
- Pietrenko-Dabrowska, A.; Koziel, S. Surrogate modeling of impedance matching transformers by means of variable-fidelity EM simulations and nested co-kriging. Int. J. RF Microw. Comput. Aided Eng. 2020, 30, e22268. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A. Low-cost performance-driven modelling of compact microwave components with two-layer surrogates and gradient kriging. AEU Int. J. Electron. Comm. 2020, 126, 153419. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A. Reliable data-driven modeling of high-frequency structures by means of nested kriging with enhanced design of experiments. Eng. Comput. 2019, 36, 2293–2308. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A. Reduced-cost design closure of antennas by means of gradient search with restricted sensitivity updates. Metrol. Meas. Syst. 2019, 26, 595–605. [Google Scholar]
- Pietrenko-Dabrowska, A.; Koziel, S. Expedited antenna optimization with numerical derivatives and gradient change tracking. Eng. Comput. 2019, 37, 1179–1193. [Google Scholar] [CrossRef]
- Pietrenko-Dabrowska, A. Rapid tolerance-aware design of miniaturized microwave passives by means of confined-domain surrogates. Int. J. Num. Model. 2020, 33, e2779. [Google Scholar]
- Koziel, S.; Pietrenko-Dabrowska, A. Efficient gradient-based algorithm with numerical derivatives for expedited optimization of multi-parameter miniaturized impedance matching transformers. Radioengineering 2019, 27, 572–578. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko-Dabrowska, A. An efficient trust-region algorithm for wideband antenna optimization. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Cracow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]
- Pietrenko-Dabrowska, A.; Koziel, S. Expedited gradient-based design closure of antennas using variable-resolution simulations and sparse sensitivity updates. IEEE Trans. Antennas Propag. 2021, 70, 4925–4930. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A. Fast multi-objective optimization of antenna structures by means of data-driven surrogates and dimensionality reduction. IEEE Access 2020, 8, 183300–183311. [Google Scholar] [CrossRef]
- Pietrenko-Dabrowska, A.; Koziel, S. Accelerated multiobjective design of miniaturized microwave components by means of nested kriging surrogates. Int. J. RF Microw. Comput. Aided Eng. 2020, 30, e22124. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko-Dabrowska, A. Constrained multi-objective optimization of compact microwave circuits by design triangulation and pareto front interpolation. Eur. J. Oper. Res. 2022, 299, 302–312. [Google Scholar] [CrossRef]
- Liu, B.; Yang, H.; Lancaster, M.J. Global optimization of microwave filters based on a surrogate model-assisted evolutionary algorithm. IEEE Trans. Microw. Theory Tech. 2017, 65, 1976–1985. [Google Scholar] [CrossRef]
- Lalbakhsh, A.; Afzal, M.U.; Esselle, K.P. Multiobjective particle swarm optimization to design a time-delay equalizer metasurface for an electromagnetic band-gap resonator antenna. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 912–915. [Google Scholar] [CrossRef]
- Tomasson, J.A.; Koziel, S.; Pietrenko Dabrowska, A. Quasi-global optimization of antenna structures using principal components and affine subspace-spanned surrogates. IEEE Access 2020, 8, 50078–50084. [Google Scholar] [CrossRef]
- Kaur, M.; Sivia, J.S. Giuseppe Peano and Cantor set fractals based miniaturized hybrid fractal antenna for biomedical applications using artificial neural network and firefly algorithm. Int. J. RF Microw. CAE 2020, 30, e22000. [Google Scholar] [CrossRef]
- Dhakshinamoorthi, M.K.; Gokulakkrizhna, S.; Denesh Kumar, M.; Subha, M.; Mekaladevi, V. Rectangular microstrip patch antenna miniaturization using improvised genetic algorithm. In Proceedings of the 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 15–17 June 2020; pp. 894–898. [Google Scholar]
- Boudjerda, M.; Reddaf, A.; Kacha, A.; Hamdi-Cherif, K.; Alharbi, T.E.A.; Alzaidi, M.S.; Alsharef, M.; Ghoneim, S.S.M. Design and optimization of miniaturized microstrip patch antennas using a genetic algorithm. Electronics 2022, 11, 2123. [Google Scholar] [CrossRef]
- Lamsalli, M.; El Hamichi, A.; Boussouis, M.; Touhami, N.A.; Elhamadi, T. Genetic algorithm optimization for microstrip patch antenna miniaturization. Progr. Electr. Res. Lett. 2016, 60, 113–120. [Google Scholar] [CrossRef]
- Souza, E.A.M.; Oliveira, P.S.; D’Assunção, A.G.; Mendonça, L.M.; Peixeiro, C. Miniaturization of a microstrip patch antenna with a Koch fractal contour using a social spider algorithm to optimize shorting post position and inset feeding. Int. J. Antennas Propag. 2019, 2019, 6284830. [Google Scholar] [CrossRef]
- Johanesson, D.O.; Koziel, S. Feasible space boundary search for improved optimization-based miniaturization of antenna structures. IEEE Microw. Antennas Propag. 2018, 12, 1273–1278. [Google Scholar] [CrossRef]
- Mahrokh, M.; Koziel, S. Optimization-based antenna miniaturization using adaptively adjusted penalty factors. Electronics 2021, 10, 1751. [Google Scholar] [CrossRef]
- Mahrokh, M.; Koziel, S. Explicit size-reduction of circularly polarized antennas through constrained optimization with penalty factor adjustment. IEEE Access 2021, 9, 132390–132396. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A. Reliable EM-driven size reduction of antenna structures by means of adaptive penalty factors. IEEE Trans. Antennas Propag. 2022, 70, 1389–1401. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A. Direct constraint control for EM-based miniaturization of microwave passives. Sci. Rep. 2022, 12, 13320. [Google Scholar] [CrossRef]
- Pietrenko-Dabrowska, A.; Koziel, S. On EM-driven size reduction of antenna structures with explicit constraint handling. IEEE Access 2021, 9, 165766–165772. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko Dabrowska, A.; Mahrokh, M. On decision-making strategies for improved-reliability size reduction of microwave passives: Intermittent correction of equality constraints and adaptive handling of inequality constraints. Knowl.-Based Syst. 2022, 255, 109745. [Google Scholar] [CrossRef]
- Mahrokh, M.; Koziel, S. Improved-efficacy EM-based antenna miniaturization by multi-fidelity simulations and objective function adaptation. Energies 2021, 15, 403. [Google Scholar] [CrossRef]
- Tan, X.; Sun, J.; Lin, F. A compact frequency-reconfigurable rat-race coupler. IEEE Microw. Wirel. Comp. Lett. 2020, 30, 665–668. [Google Scholar] [CrossRef]
- Chi, P.-L.; Shang, S.-A.; Yang, T. Novel compact coupler with tunable frequency, phase difference, and power-dividing ratio. IEEE Microw. Wirel. Comp. Lett. 2021, 31, 1119–1122. [Google Scholar] [CrossRef]
- Zhu, Y.; Dong, Y. A novel compact wide-stopband filter with hybrid structure by combining SIW and microstrip technologies. IEEE Microw. Wirel. Comp. Lett. 2021, 31, 841–844. [Google Scholar] [CrossRef]
- Wen, L.; Gao, S.; Sanz-Izquierdo, B.; Wang, C.; Hu, W.; Ren, X.; Wu, J. Compact and wideband crossed dipole antenna using coupling stub for circular polarization. IEEE Trans. Antennas Propag. 2022, 70, 27–34. [Google Scholar] [CrossRef]
- Sun, L.; Li, Y.; Zhang, Z. Wideband dual-polarized endfire antenna based on compact open-ended cavity for 5G Mm-Wave mobile phones. IEEE Trans. Antennas Propag. 2022, 70, 1632–1642. [Google Scholar] [CrossRef]
- Neophytou, K.; Steeg, M.; Stöhr, A.; Antoniades, M.A. Compact folded leaky-wave antenna radiating a fixed beam at broadside for 5G mm-Wave applications. IEEE Antennas Wireless Propag. Lett. 2022, 21, 292–296. [Google Scholar] [CrossRef]
- Ye, M.; Li, X.; Chu, Q. Single-layer circularly polarized antenna with fan-beam endfire radiation. IEEE Ant. Wirel. Propag. Lett. 2017, 16, 20–23. [Google Scholar] [CrossRef]
- Conn, A.R.; Gould, N.I.M.; Toint, P.L. Trust Region Methods; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
- Alsath, M.G.N.; Kanagasabai, M. Compact UWB monopole antenna for automotive communications. IEEE Trans. Ant. Prop. 2015, 63, 4204–4208. [Google Scholar] [CrossRef]
- Kumar, B.P.; Kumar, C.; Guha, D. A new design approach to improve the circular polarization characteristics of a microstrip antenna. In Proceedings of the 2018 IEEE Indian Conference on Antennas and Propogation (InCAP), Hyderabad, India, 16–19 December 2018; pp. 1–2. [Google Scholar]
- Haq, M.A.; Koziel, S. Simulation-based optimization for rigorous assessment of ground plane modifications in compact UWB antenna design. Int. J. RF Microw. CAE 2018, 28, e21204. [Google Scholar] [CrossRef]
- Phani Kumar, K.V.; Karthikeyan, S.S. A novel design of rat-race coupler using defected microstrip structure and folding technique. In Proceedings of the 2013 IEEE Applied Electromagnetics Conference (AEMC), Bhubaneswar, India, 18–20 December 2013; pp. 1–2. [Google Scholar]
- Letavin, D.A.; Shabunin, S.N. Miniaturization of a branch-line coupler using microstrip cells. In Proceedings of the 2018 XIV International Scientific-Technical Conference on Actual Problems of Electronics Instrument Engineering (APEIE), Novosibirsk, Russia, 2–6 October 2018; pp. 62–65. [Google Scholar]
- Letavin, D.A.; Mitelman, Y.E.; Chechetkin, V.A. Compact microstrip branch-line coupler with unequal power division. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 1162–1165. [Google Scholar]
- Malekabadi, S.A.; Attari, A.R.; Mirsalehi, M.M. Compact broadband circular polarized microstrip antenna with wideband axial-ratio bandwidth. In Proceedings of the 2008 International Symposium on Telecommunications, Tehran, Iran, 27–28 August 2008; pp. 106–109. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Approach | Performance Figure | ||||
|---|---|---|---|---|---|
| Antenna Footprint A [mm2] 1 | Std(A) 2 | Constraint Violation D [dB] 3 | Std(D) [dB] 4 | ||
| Penalty function approach | β = 102 | 113.7 | 9.07 | 8.40 | 0.53 |
| β = 103 | 250.4 | 24.0 | 1.20 | 0.50 | |
| β = 104 | 318.6 | 60.0 | 0.14 | 0.10 | |
| β = 105 | 331.6 | 63.4 | 0.10 | 0.14 | |
| β = 106 | 367.6 | 51.9 | 0.05 | 0.11 | |
| Adaptive penalty factors [28] | 281.6 | 37.1 | 0.23 | 0.15 | |
| Algorithm with Fixed Penalty Factors | Antenna Footprint A [mm2] 1 | Constraint Violation ζS11 [dB] 2 | Constraint Violation ζAR [dB] 3 | |
|---|---|---|---|---|
| βAR | βS11 | |||
| 10 | 102 | 374.38 | 2.77 | 0 |
| 10 | 103 | 323.37 | 2.24 | 0.2 |
| 10 | 104 | 334.37 | 2.69 | 0.01 |
| 10 | 105 | 340.24 | 2.15 | 0.01 |
| 102 | 102 | 309.99 | 0.05 | 3.8 |
| 102 | 103 | 361.73 | 0.33 | 0 |
| 102 | 104 | 359.71 | 0.27 | 0 |
| 102 | 105 | 356.18 | 0.20 | 0 |
| 103 | 102 | 404.58 | 0.07 | 0 |
| 103 | 103 | 421.75 | 0.05 | 0 |
| 103 | 104 | 421.75 | 0.05 | 0 |
| 103 | 105 | 421.75 | 0.05 | 0 |
| 104 | 102 | 455.41 | 0.03 | 0 |
| 104 | 103 | 455.41 | 0.03 | 0 |
| 104 | 104 | 455.41 | 0.03 | 0 |
| 104 | 105 | 455.41 | 0.03 | 0 |
| Adaptive penalty factors [41] | 373.36 | 0 | 0 | |
| Optimization Approach | Performance Figure | ||||
|---|---|---|---|---|---|
| Antenna Footprint A [mm2] 1 | Std(A) 2 | Constraint Violation D [dB] 3 | Std(D) [dB] 4 | ||
| Penalty function approach | β = 102 | 56.1 | 3.8 | 8.6 | 0.60 |
| β = 103 | 212.8 | 14.3 | 1.0 | 0.40 | |
| β = 104 | 255.0 | 25.1 | 0.15 | 0.10 | |
| β = 105 | 280.1 | 47.4 | 0.05 | 0.07 | |
| β = 106 | 285.8 | 29.6 | 0.00 | 0.01 | |
| Adaptive penalty factors [28] | 215.6 | 3.6 | 0.25 | 0.14 | |
| Explicit constraint handling [30] | 224.4 | 6.7 | 0.10 | 0.21 | |
| Optimization Approach | Performance Parameters | ||||||
|---|---|---|---|---|---|---|---|
| Design Scenario I (F = [1.15 1.25] GHz) | Design Scenario II (F = [1.18 1.22] GHz) | ||||||
| Method | Setup | Footprint Area A [mm2] 1 | Violation of Equality Constraint g1 [dB] 2 | Violation of Inequality Constraint g2 [dB] 3 | Footprint Area A [mm2] 1 | Violation of Equality Constraint g1 [dB] 3 | Violation of Inequality Constraint g2 [dB] 4 |
| Implicit constraint handling (penalty function approach) | β1 = 101, β2 = 101 | 1067 | 0.17 | 0.7 | 1043 | 0.12 | −0.7 |
| β1 = 101, β2 = 102 | 681 | 0.01 | 10.4 | 679 | 0.00 | 9.4 | |
| β1 = 101, β2 = 103 | 1063 | 0.03 | 0.1 | 1063 | 0.03 | −1.0 | |
| β1 = 101, β2 = 104 | 1097 | 0.02 | −0.1 | 1097 | 0.02 | −1.2 | |
| β1 = 102, β2 = 101 | 1120 | 0.04 | 0.6 | 1120 | 0.04 | −0.5 | |
| β1 = 102, β2 = 102 | 1134 | 0.00 | −0.3 | 1134 | 0.00 | −1.7 | |
| β1 = 102, β2 = 103 | 1133 | 0.00 | 0.1 | 1133 | 0.00 | −1.2 | |
| β1 = 102, β2 = 104 | 1038 | 0.03 | 1.1 | 1038 | 0.03 | 0.0 | |
| β1 = 103, β2 = 101 | 1165 | 0.05 | −0.3 | 1165 | 0.05 | −1.7 | |
| β1 = 103, β2 = 102 | 1119 | 0.01 | −0.1 | 1119 | 0.01 | −1.3 | |
| β1 = 103, β2 = 103 | 1152 | 0.06 | −0.3 | 1152 | 0.06 | −1.6 | |
| β1 = 103, β2 = 104 | 1117 | 0.08 | −0.1 | 1047 | 0.08 | −1.7 | |
| β1 = 104, β2 = 101 | 1218 | 0.00 | −0.0 | 1136 | 0.02 | 0.2 | |
| β1 = 104, β2 = 102 | 1208 | 0.00 | −0.2 | 1132 | 0.01 | −2.1 | |
| β1 = 104, β2 = 103 | 1152 | 0.00 | −0.5 | 1152 | 0.00 | −1.7 | |
| β1 = 104, β2 = 104 | 1152 | 0.02 | −0.1 | 1134 | 0.00 | −2.2 | |
| Explicit constraint handling [43] | 1106 | 0.04 | −0.1 | 1045 | 0.01 | −0.1 | |
| Optimization Approach | Performance Parameters | ||||||
|---|---|---|---|---|---|---|---|
| Circuit I (f0 = 1.0 GHz) | Circuit II (f0 = 2.0 GHz) | ||||||
| Method | Setup | Footprint Area A [mm2] 1 | Violation of Equality Constraint g1 [dB] 2 | Violation of Inequality Constraint g2 [dB] 3 | Footprint Area A [mm2] 1 | Violation of Equality Constraint g3 [dB] 4 | Violation of Inequality Constraint g4 [dB] 5 |
| Implicit constraint handling (penalty function approach) | β1 = 101, β2 = 101 | 73 | 0.01 | 13.8 | 130 | 0.03 | 2.1 |
| β1 = 101, β2 = 102 | 75 | 0.01 | 13.8 | 135 | 0.06 | 1.8 | |
| β1 = 101, β2 = 103 | 305 | 1.12 | 2.3 | 121 | 1.75 | 0.3 | |
| β1 = 101, β2 = 104 | 334 | 1.22 | 0.2 | 146 | 0.02 | 0.1 | |
| β1 = 102, β2 = 101 | 73 | 0.01 | 13.8 | 114 | 0.02 | 4.7 | |
| β1 = 102, β2 = 102 | 73 | 0.01 | 13.8 | 141 | 0.04 | 2.9 | |
| β1 = 102, β2 = 103 | 382 | 0.20 | 2.4 | 135 | 0.01 | 0.5 | |
| β1 = 102, β2 = 104 | 428 | 0.08 | 0.1 | 152 | 0.01 | 0.1 | |
| β1 = 103, β2 = 101 | 73 | 0.01 | 13.8 | 141 | 0.00 | 1.1 | |
| β1 = 103, β2 = 102 | 268 | 0.03 | 11.5 | 140 | 0.09 | 1.2 | |
| β1 = 103, β2 = 103 | 324 | 0.07 | 3.7 | 142 | 0.02 | 1.3 | |
| β1 = 103, β2 = 104 | 414 | 0.04 | 0.2 | 148 | 0.01 | 0.2 | |
| β1 = 104, β2 = 101 | 262 | 0.00 | 11.7 | 164 | 0.00 | 1.3 | |
| β1 = 104, β2 = 102 | 303 | 0.00 | 9.6 | 200 | 0.00 | 6.1 | |
| β1 = 104, β2 = 103 | 448 | 0.00 | 0.0 | 203 | 0.01 | 5.0 | |
| β1 = 104, β2 = 104 | 419 | 0.01 | 0.3 | 207 | 0.01 | 0.3 | |
| Optimization-based equality constraint correction [44] | 362 | 0.03 | 0.2 | 129 | 0.03 | 0.4 | |
| Performance Figures | Optimization Method | ||
|---|---|---|---|
| Adaptive Penalty Factors [42] | Variable-Fidelity 4 EM Simulations + Adaptive Penalty Factors [46] | ||
| Area A [mm2] 1 | 372.7 | 368 | |
| First constraint violation ζS11 [dB] 2 | 0 | 0.02 | |
| Second constraint violation ζAR [dB] 3 | 0 | 0 | |
| CPU time | Absolute [h] | 8.8 | 4.7 |
| Relative to Rf | 135 | 72 | |
| Saving [%] | − | 47 | |
| Approach | Implicit Constraint Handling with Adaptive Penalty Factors (Section 3) | Explicit Constraint Handling (Section 4) | Equality Constraint Control through Optimization-Based Correction (Section 5) | Expedited Optimization-Based Miniaturization Algorithm (Section 6) | ||
|---|---|---|---|---|---|---|
| Versions | Convergence-based penalty factor adjustment (Section 3.1) | Penalty factor adjustment based on constraint violation improvement (Section 3.2) | – | – | – | |
| Constraint treatment | Equality | Implicit | Implicit | Explicit | Explicit | Implicit |
| Inequality | Implicit | Implicit | Explicit | Implicit | Implicit | |
| Simulation model | High-fidelity | High-fidelity | High-fidelity | High-fidelity | Variable-fidelity | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pietrenko-Dabrowska, A.; Koziel, S.; Mahrokh, M. Optimization-Based High-Frequency Circuit Miniaturization through Implicit and Explicit Constraint Handling: Recent Advances. Energies 2022, 15, 6955. https://doi.org/10.3390/en15196955
Pietrenko-Dabrowska A, Koziel S, Mahrokh M. Optimization-Based High-Frequency Circuit Miniaturization through Implicit and Explicit Constraint Handling: Recent Advances. Energies. 2022; 15(19):6955. https://doi.org/10.3390/en15196955
Chicago/Turabian StylePietrenko-Dabrowska, Anna, Slawomir Koziel, and Marzieh Mahrokh. 2022. "Optimization-Based High-Frequency Circuit Miniaturization through Implicit and Explicit Constraint Handling: Recent Advances" Energies 15, no. 19: 6955. https://doi.org/10.3390/en15196955
APA StylePietrenko-Dabrowska, A., Koziel, S., & Mahrokh, M. (2022). Optimization-Based High-Frequency Circuit Miniaturization through Implicit and Explicit Constraint Handling: Recent Advances. Energies, 15(19), 6955. https://doi.org/10.3390/en15196955