
Research Progress on Recoil Analysis and Control Technology of Deepwater Drilling Risers



Abstract
:1. Introduction
2. Recoil Response Characteristics
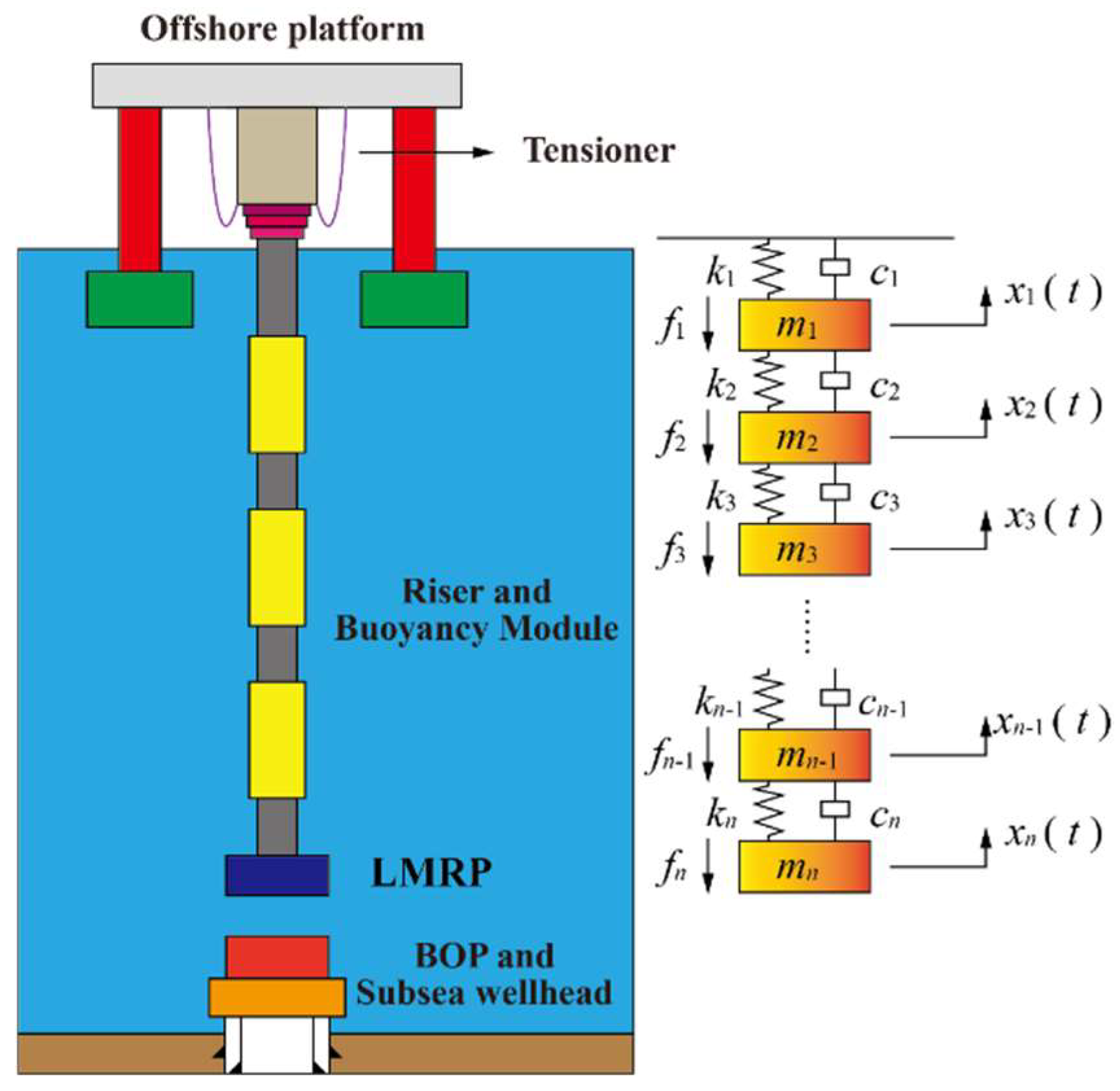
2.1. Recoil Response Mechanism
2.2. Mechanical Behavior of Recoil Response
3. Drilling Mud Discharge Process
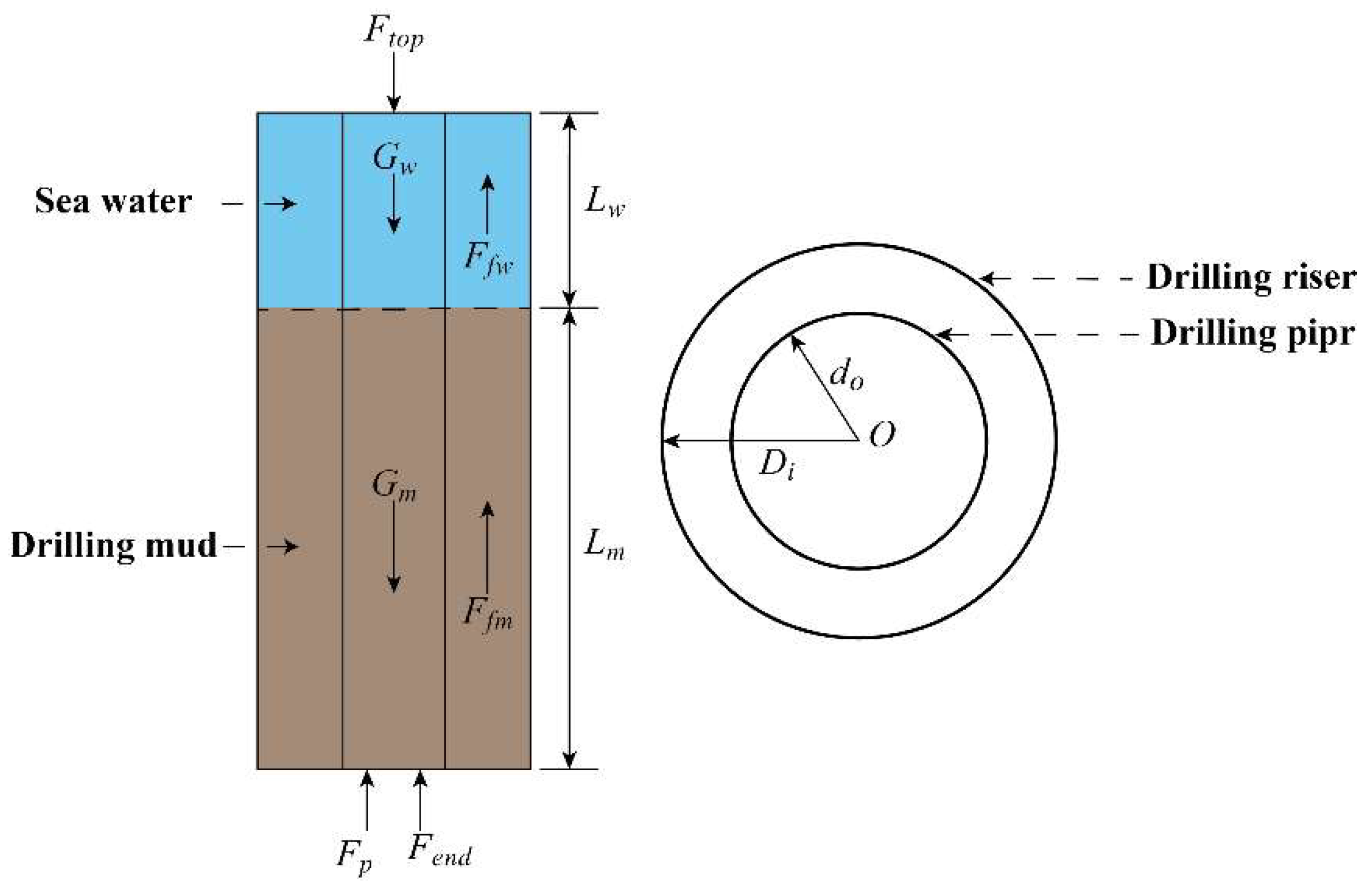
3.1. Mechanical Model of Drilling Mud Discharge
3.2. Influence of Mud on Recoil Response
4. Recoil Response Control
4.1. Mechanical Model of Top Tensioner System
4.2. Antirecoil Control System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, D.L.; Wang, Y.B. Some research progress in deepwater drilling mechanics and control technology. Acta Pet. Sin. 2019, 40, 102–115. [Google Scholar] [CrossRef]
- Liu, S.Y.; Sun, M.Y. Discussion on design, selection and configuration of riser system in deep-water drilling. Chem. Enterp. Manag. 2021, 4, 132–133. [Google Scholar] [CrossRef]
- American Petroleum Institute. Recommended Practice for Design, Selection, Operation and Maintenance of Marine Drilling Riser System; API QP 16Q; American Petroleum Institute: Washington, DC, USA, 2017. [Google Scholar] [CrossRef]
- Gao, D.L.; Wang, Y.B. Progress in tubular mechanics and design control techniques for deep-water drilling. Pet. Sci. Bull. 2016, 1, 61–80. [Google Scholar] [CrossRef]
- American Bureau of Shipping. Guidance Notes on Drilling Riser Analysis; ABS; American Bureau of Shipping: Huston, TX, USA, 2017; p. 280. [Google Scholar]
- Chen, K.; Huang, J.; Han, X.Y.; Li, J.X.; Guo, L.L.; Xia, C.Y. Mechanical characteristics analysis of marine riser system. Ship Eng. 2021, 43, 6–13. [Google Scholar] [CrossRef]
- Li, C.W. Research on Overall Mechanical Properties of Deepwater Drilling Riser-Wellhead-Conductor System. Ph.D. Thesis, China University of Petroleum (Beijing), Beijing, China, 2018. [Google Scholar]
- Stahl, M.J.; Wishahy, M.; Brekke, J.N. Riser recoil analysis at a harsh environment. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Vancouver, BC, Canada, 20–25 June 2004. [Google Scholar] [CrossRef]
- Meng, S.; Che, C.D.; Zhang, W.J. Discharging flow effect on the recoil response of a deep-water drilling riser after an emergency disconnect. Ocean Eng. 2018, 151, 199–205. [Google Scholar] [CrossRef]
- Li, C.W.; Fan, H.H.; Wang, Z.M.; Shen, W.G.; Wang, Y.Q. Recoil response of deepwater drilling riser during emergency disconnection. Ocean Eng. 2015, 4, 121–127. [Google Scholar] [CrossRef]
- Grytøyr, G.; Sharma, P.; Vishnubotla, S. Marine drilling riser disconnect and recoil analysis. In Proceedings of the National Technical Conference and Exhibition, Houston, TX, USA, 12–14 April 2011. [Google Scholar]
- Liao, M.L.; Zhou, Y.C.; Su, Y.N.; Lian, A.L.; Jiang, H.W. A study of the dynamic analysis and design method of deepwater drilling string systems. Pet. Drill. Technol. 2019, 47, 56–62. [Google Scholar] [CrossRef]
- Guo, M. Research on Vibration Law of Riser in Deep Water Drilling. Master’s Thesis, Northeastern Petroleum University, Heilongjiang, China, 2021. [Google Scholar] [CrossRef]
- Ding, T.H.; Li, C. Analysis of coupling axial vibrations between drilling fluids and drill string. Chinses J. Mech. Eng. 2007, 43, 215–219. [Google Scholar] [CrossRef]
- Young, R.; Hock, C.; Karlsen, G.; Miller, J. Analysis and design of anti-recoil system for emergency disconnect of a deepwater riser. In Proceedings of the Ocean Technology Conference, Houston, TX, USA, 4–7 May 1992. [Google Scholar] [CrossRef]
- Yang, H.Z.; Xiao, F. Instability analyses of a top-tensioned riser under combined vortex and multi-frequency parametric excitations. Ocean Eng. 2004, 81, 12–28. [Google Scholar] [CrossRef]
- Yang, J.; Meng, W.; Yao, M.B.; Gao, D.L.; Zhou, B.; Xu, Y.J. Calculation method of riser top tension in deep water drilling. Pet. Explor. Dev. 2015, 42, 107–110. [Google Scholar] [CrossRef]
- Brekke, J.N. Key elements in ultra-deep water drilling riser management. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 27 February–1 March 2001; p. 67812. [Google Scholar] [CrossRef]
- Young, R.; Hock, C.; Karlsen, G.; Albert, J. Comparison of analysis and full-scale testing of anti-recoil system for emergency disconnect of deepwater riser. In Proceedings of the Ocean Technology Conference, Houston, TX, USA, 4–7 May 1992. [Google Scholar] [CrossRef]
- Peter, M.; Pyke, J.; Vankadari, A.; Whooley, A. Ensuring safe riser emergency disconnect in harsh environments-experience and design requirements. In Proceedings of the International Offshore and Polar Engineering, Houston, TX, USA, 30 June–5 July 2013. [Google Scholar]
- Lang, D.W.; Real, J.; Lane, M. Recent developments in drilling riser disconnect and recoil analysis for deepwater applications. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar] [CrossRef]
- Hock, C.J.; Young, R.D. A deepwater riser emergency disconnect anti-recoil system. J. Pet. Technol. 1993, 45, 744–751. [Google Scholar] [CrossRef]
- Ren, G.F.; Wang, D.Y.; Deng, P.; Niu, M.; Xin, X.G. Technological analysis of the riser tensioner in offshore drilling. China Pet. Mach. 2013, 41, 43–45. [Google Scholar] [CrossRef]
- Miller, J.E.; Stahl, M.J.; Matice, C.J. Riser collapse pressures resulting from release of deepwater mud columns. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 4–7 May 1998. [Google Scholar] [CrossRef]
- Stahl, M.J.; Hock, C.J. Design of a riser recoil control system and validation through full-scale testing. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dallas, TX, USA, 1–4 October 2000. [Google Scholar] [CrossRef]
- Dupal, K.; Curtiss, J.P.; Noort, R.H.; Mack, C. LMRP Disconnect in deepwater, harsh environment conditions. In Proceedings of the IADC/SPE Drilling Conference, Fort Worth, TX, USA, 6–8 March 2018. [Google Scholar] [CrossRef]
- Sun, Y.Y. Strength Assessment for Deepwater Drilling Riser and Engineering Application. Ph.D. Thesis, China University of Petroleum (East China), Chengdu, China, 2009. [Google Scholar]
- Zhang, W.; Gao, D.L. Research on the Dynamic Behavior of Riser in Deepwater Drilling under the Condition of Disconnection Mode. Pet. Drill. Technol. 2010, 38, 7–9. [Google Scholar] [CrossRef]
- Karlsen, G.; Sikes, J.D. 6000-ft water depth upgrade of the sonat discoverer 534. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 11–14 March 1991. [Google Scholar] [CrossRef]
- Rinaldi, S.; Païdoussis, M.P. Dynamics of a cantilevered pipe discharging fluid, fitted with a stabilizing end-piece. Ocean Eng. 2010, 3, 517–525. [Google Scholar] [CrossRef]
- Brynestad, B.I. Disconnection of Workover Risers on Very Deep Water. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2012. [Google Scholar]
- Zhang, L. Recoil Analysis for Deepwater Drilling Riser System. Master’s Thesis, China University of Petroleum (East China), Chengdu, China, 2014. [Google Scholar]
- Li, C.W.; Fan, H.H.; Wang, Z.M.; Shen, W.G.; Feng, X.; Deng, S. Numerical simulation of mud discharge after drilling riser emergency disconnection. In Proceedings of the International Society of Offshore and Polar Engineers, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Li, C.W.; Wang, J.S.; Zhou, J.L.; Xu, L.B.; Wu, W.B. Analysis on the flow field characteristics around a drilling riser considering auxiliary lines. China Offshore Oil Gas 2019, 31, 133–139. [Google Scholar] [CrossRef]
- Wang, T.; Wang, K. Analysis of resilient response of emergently disentangled drilling risers. China Offshore Oil Gas 2018, 30, 120–125. [Google Scholar] [CrossRef]
- Meng, S.; Chen, Y.; Che, C.D. Coupling effects of a deep-water drilling riser and the platform and the discharging fluid column in an emergency disconnect scenario. China Ocean Eng. 2020, 34, 21–29. [Google Scholar] [CrossRef]
- Wang, Y.B.; Gao, D.L. Recoil analysis of deepwater drilling riser after emergency disconnection. Ocean Eng. 2019, 189, 106406. [Google Scholar] [CrossRef]
- Wang, Y.B.; Gao, D.L. Recoil response of deepwater drilling riser during emergency disconnection based on a multi-degrees-of-freedom system. Acta Pet. Sin. 2020, 41, 1259–1265. [Google Scholar] [CrossRef]
- Wang, Y.B.; Gao, D.L. Mechanical analysis on recoil response of deepwater drilling riser based on a complex mode method. J. China Univ. Pet. (Ed. Nat. Sci.) 2020, 44, 58–63. [Google Scholar] [CrossRef]
- Li, C.W.; Fan, H.H.; Wang, Z.M.; Shen, W.G.; Wang, Y.Q. Quasi-static analysis of a drilling riser under combined loads of non-uniform currents, surface waves and internal solitary waves. China Offshore Oil Gas 2015, 2, 78–86. [Google Scholar] [CrossRef]
- Li, C.W.; Xu, L.B.; Sheng, L.X.; Li, M.B.; Jiang, Z.B. Application of the preconditioned GMRES(m) algorithm in dynamic calculation of a drilling riser. J. Jiangsu Univ. Sci. Technol. (Nat. Sci. Ed.) 2018, 32, 765–773. [Google Scholar] [CrossRef]
- Su, W.; Meng, S.; Wang, J.X.; Wang, Z. Coupling effect of a deep-water drilling riser in recoil after emergency disconnection. Equip. Environ. Eng. 2018, 15, 40–44. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Z.; Wang, X.; Zhang, N.; Qiu, N.; Chang, Y.; Chen, G. Recoil control of deepwater drilling riser system based on optimal control theory. Ocean Eng. 2021, 220, 108473. [Google Scholar] [CrossRef]
- Liu, X.Q.; Li, J.Y.; Ren, K.R.; Xu, L.B.; Chang, Y.J.; Song, Q. A calculation method for the top tension of deepwater drilling risers based on recoil response. Pet. Drill. Technol. 2016, 44, 47–51. [Google Scholar] [CrossRef]
- Grønevik, A. Simulation of Drilling Riser Disconnection-Recoil Analysis. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2013. [Google Scholar] [CrossRef]
- Pestana, R.G.; Roveri, F.E.; Franciss, R.; Ellwanger, G.B. Marine riser emergency disconnection analysis using scalar elements for tensioner modelling. Ocean Eng. 2016, 59, 83–92. [Google Scholar] [CrossRef]
- Yang, Y.X. Research on Recoil Mechanism and Control Strategy of Emergency Release of Deepwater Drilling Riser. Master’s Thesis, China University of Petroleum (Beijing), Beijing, China, 2020. [Google Scholar] [CrossRef]
- Sun, M.; Zhang, M.; Liu, S.; Huang, F.; Yang, Y. Emergency release analysis of the riser on semi-submersible drilling rig. Drill. Eng. 2021, 48, 82–87. [Google Scholar] [CrossRef]
- Puccio, W.F.; Nuttall, R.-V. Riser recoil during unscheduled lower marine riser package disconnects. In Proceedings of the IADC/SPE Drilling Conference, Dallas, TX, USA, 3–6 March 1998. [Google Scholar] [CrossRef]
- Grytøyr, G. Improving operating window for disconnect operations of CWO risers. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010. [Google Scholar] [CrossRef]
- Li, C.; Fan, H.; Wang, Z.; Ji, R.; Ren, W.; Feng, X. Two methods for simulating mud discharge after emergency disconnection of a drilling riser. Ocean Eng. 2016, 28, 142–152. [Google Scholar] [CrossRef]
- Zhang, W.; Gao, D.L.; Fan, C.Y. Hydrostatic collapse analysis of marine drilling riser. Drill. Technol. 2010, 33, 74–76. [Google Scholar] [CrossRef]
- Sun, Y.Y.; Chen, G.M.; Chang, Y.J. Axial direction dynamic analysis on ultra deep-water drilling riser under setting down and recovery operations. China Offshore Oil Gas 2009, 21, 116–119. [Google Scholar] [CrossRef]
- Zhang, L.; Chang, Y.J.; Liu, X.Q.; Liu, K.; Chen, L.M. Recoil analysis for deepwater drilling riser after emergency disconnection with blowout preventer. Pet. Drill. Technol. 2013, 41, 25–30. [Google Scholar] [CrossRef]
- Diao, Y.; Sun, B.L.; Wang, C.S.; Kang, J.; Pang, B.X.; Feng, Z.S. High pressure casing annulus well fracturing oil pressure drop calculation. Oil Field Equip. 2014, 43, 26–29. [Google Scholar] [CrossRef]
- Wang, K. Recoil Analysis for Drilling Riser for Emergency Disconnection. Master’s Thesis, China University of Petroleum (East China), Chengdu, China, 2020. [Google Scholar] [CrossRef]
- Wang, Y.B.; Gao, D.L.; Fang, J. Study on lateral vibration analysis of marine riser in installation-via variational approach. Ocean Eng. 2015, 22, 523–529. [Google Scholar] [CrossRef]
- Wang, Y.B.; Gao, D.L. Influence of the damping matrix and mud discharge on the recoil response of deepwater drilling riser after emergency disconnection. Ocean Eng. 2021, 222, 108591. [Google Scholar] [CrossRef]
- Wang, Y.B.; Gao, D.L.; Wang, J.D. Methodology for recoil analysis of emergency disconnection drilling riser in a deepwater environment. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 11–14 November 2019. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Zhang, S.; Chen, G.; Chang, Y. Study on mud discharge after emergency disconnection of deepwater drilling risers. Ocean Eng. 2022, 190, 107105. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Z.; Wang, X.; Qiu, N.; Zhang, N.; Chang, Y.; Chen, G. An intelligent recoil controller for riser system based on fuzzy control theory. Ocean Eng. 2022, 14, 100439. [Google Scholar] [CrossRef]
- Zhou, R.; Lai, L. Performance analysis of riser tensioner for drilling vessel. Mar. Technol. 2019, 1, 32–35. [Google Scholar] [CrossRef]
- Liu, S.Y.; Sun, M.Y. Discussion on key factors of deep-water drilling unit design. Chem. Enterp. Manag. 2021, 4, 142–143. [Google Scholar] [CrossRef]
- Liu, Y.J. Analysis of Deepwater Drilling Riser Tensioner System and Recoil Control. Master’s Thesis, China University of Petroleum (East China), Chengdu, China, 2019. [Google Scholar] [CrossRef]
- Wang, T.; Liu, Y.J. Dynamic response of platform-riser coupling system with hydro-pneumatic tensioner. Ocean Eng. 2018, 166, 172–181. [Google Scholar] [CrossRef]
- Zhao, Y.-D.; Sun, Y.-T.; Zhang, B.-L.; Han, Q.-L.; Zhang, X.-M. Recoil control of deepwater drilling riser systems via optimal control with feedforward mechanisms. Ocean Eng. 2022, 257, 111690. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Liu, Z.; Qiu, N.; Hu, P.; Chang, Y.; Chen, G.; Li, C. Dynamic recoil response of tensioner and riser coupled in an emergency disconnection scenario. Ocean Eng. 2022, 247, 110730. [Google Scholar] [CrossRef]
- Zhang, L.; Chang, Y.J.; Liu, X.Q.; Liu, K.; Yang, H.L. AMESim-based modeling and simulation of platform riser tensioner. China Pet. Mach. 2013, 41, 38–42. [Google Scholar] [CrossRef]
- Zhang, F.F. The Countermeasure and Application Research of Anti-Recoil Control about Deepwater Drilling Riser Device. Master’s Thesis, China University of Petroleum (East China), Chengdu, China, 2015. [Google Scholar]
- Tian, X.J. Research on Recoil Control of Deepwater Drilling Riser Tensioning System. Master’s Thesis, China University of Petroleum (East China), Chengdu, China, 2013. [Google Scholar]
- He, X.; Zhang, F.; Tian, X.; Liu, X.Q. Modeling and simulation for recoil control system of deepwater drilling riser. China Pet. Mach. 2016, 44, 63–67. [Google Scholar] [CrossRef]
- Liu, Q.M.; Zhang, R.S.; Sun, C.X.; Ren, G.F.; Li, H. Design of monitoring system for cable-type riser tensioner. China Pet. Mach. 2014, 42, 124–128. [Google Scholar] [CrossRef]
- Liu, Q.M. Off-Line Programming and Simulation Control of New Mechanized Workover System. Master’s Thesis, Daqing Petroleum Institute, Daqing, China, 2009. [Google Scholar]
- Li, H.; Li, P.; Fan, S.; Fu, J.; Zhang, C.Y. Amesim-based research on anti-recoil control of riser tensioner. China Pet. Mach. 2019, 47, 84–89. [Google Scholar] [CrossRef]
- Li, H.; Fan, C.M.; Li, P.; Zheng, W.L.; Liu, Q.M. Research and development suggestions of floating heave compensator. China Pet. Mach. 2022, 2, 53–58. [Google Scholar] [CrossRef]
- Ren, G.F.; Wang, D.Y.; Gou, Y.F.; Niu, M.; Li, Y.P.; Xin, X.G. Research on key equipment of deepwater drilling bop system. Oil Field Mach. 2014, 43, 95–98. [Google Scholar] [CrossRef]
- Zhou, T.M.; Gou, Y.F.; Liu, Y.B.; Niu, M.; Hou, X.D.; Ren, G.F.; Li, H. Testing on dynamic load of 200k wire rope type riser tensioner. China Pet. Mach. 2017, 45, 38–42. [Google Scholar] [CrossRef]
- Dong, X.L.; Yang, X.P.; Zhao, X.; Zhang, C.L.; Zheng, L.; Fei, L. Modeling and performance analysis of liquid cylinder type riser tensioning system. Chin. Hydraul. Pneum. 2019, 8, 39–48. [Google Scholar] [CrossRef]
- Dong, X.L. Research on Anti-Backlash Control Technology of the Floating Drilling Fluid Cylinder Riser Tension System. Master’s Thesis, Xihua University, Chengdu, China, 2020. [Google Scholar] [CrossRef]
- Liao, J.M.; Dong, X.L.; Zhao, X.; Fei, L. Research on the tensioning system of offshore drilling spacer pipe. Mach. Tools Hydraul. 2020, 48, 74–79. [Google Scholar] [CrossRef]
- Duan, M.X.; Wan, B.; Yang, Q.X.; Wang, S.F.; Ge, F. Multidisciplinary simulation analysis and study for direct acting riser tensioner system. Mach. Tools Hydraul. 2019, 47, 123–127. [Google Scholar] [CrossRef]
- Sun, Z.G.; Wu, Z.; Wu, A.P.; Wei, S.H.; Wang, Y.Z.; Pang, S.Q. Recoil control analysis of deepwater drilling riser tension system. China Pet. Mach. 2020, 48, 50–55. [Google Scholar] [CrossRef]
- Fei, L.; Zhao, X.; Zhang, C.L.; Dong, X.L.; Zheng, L.; Li, L.; Li, H. Research on anti-backlash control valve of hydraulic cylinder riser tensioning system. J. Xihua Univ. Nat. Sci. Ed. 2020, 39, 36–41. [Google Scholar] [CrossRef]
- Wang, B.; He, D.S.; Xie, X.L.; Dai, H.; Li, C. Design and simulation of anti recoil valve of riser tensioner. Chin. Hydraul. Pneum. 2021, 45, 108–121. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Solving Method | Advantages—Disadvantages |
|---|---|---|
| Karlsen et al. [29] | RISTEN program | Studied engineering examples. The software cannot display the calculation process. |
| Zhang et al. [32] | Fluctuation equation for the hard hang-off mode is solved by a trial algorithm. | First theoretical solution of natural frequencies. Only the lower bound is considered. |
| Li et al. [33,34] | Recoil model couple tensioner and riser system is solved by the Newmark–β integral method. | More precise boundary conditions and external forces result in annular flow models that are close to reality. |
| Wang et al. [35] | Multi-degree of freedom system is solved by principal coordinate analysis, complex mode method and subspace iteration method, respectively. | The kinematic and mechanical properties of multiple nodes of the riser can be obtained. The accuracy decreases as the number of nodes increases, usually set to 2–4 nodes. |
| Meng et al. [36] | Four simulation models are established based on lumped mass method. | Coupled top boundary and discharging flow acceleration. The method is 1D and neglected LMRP. |
| Authors | Solving Method | Advantages—Disadvantages |
|---|---|---|
| Young et al. [19] | Slug column model. | Fluid parameters can be calculated. The data is constant for each time step. |
| Lang et al. [21] | Finite volume method. | Developed simulation capability but no detailed process. |
| Miller et al. [24] | Method of characteristics. | Variation of fluid parameters at various depths can be calculated. Boundaries cannot be considered. |
| Li et al. [51] | Herschel–Bulkley rheology mode and water impact theory. | Commonly implemented but inaccurate. |
| Zhang et al. [52,53] | The theory for fluid in a circular tube. | More precise boundary conditions and external forces result in models that are very close to reality. The results are much closer the results of other models |
| Wang et al. [56] | The overall fluid analysis model. | Directly solved by using MATLAB. Considering the slender riser as a whole, no local data can be calculated. |
| Wang et al. [57,58] | Established the mathematical expression by the sum of a finite series of sinusoidal functions. | Calculated the results of the theoretical model. Too many fitting parameters, and cannot be calculated accurately after the discharge process completes. |
| Authors | Solving Method | Advantages—Disadvantages |
|---|---|---|
| Pestana et al. [46] | Nonlinear spring–damping model. | A simpler approach and more sensitive to numerical values than the common model. |
| Grytøyr et al. [50] | Two simplified models. | Commonly implemented but inaccurate. |
| Liu et al. [64] | Platform tensioner-riser coupling system model. | Consider the effect of the riser on the tensioner. A constant stiffness spring model. |
| Zhao et al. [66] | An incremental dynamic model in the presence of the friction force of fluid discharge | Introduce an active control scheme based on smooth hyperbolic tangent functions, auxiliary systems and Nussbaum functions. |
| Wang et al. [67] | Coupling dynamic model of riser considering riser motion and mud discharge. | A nonlinear hydro-pneumatic tensioner is proposed, and the effects of the nonlinear characteristics of the tensioner on the recoil of the riser system are analyzed. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Luan, T.; Gao, D.; Wang, J. Research Progress on Recoil Analysis and Control Technology of Deepwater Drilling Risers. Energies 2022, 15, 6897. https://doi.org/10.3390/en15196897
Wang Y, Luan T, Gao D, Wang J. Research Progress on Recoil Analysis and Control Technology of Deepwater Drilling Risers. Energies. 2022; 15(19):6897. https://doi.org/10.3390/en15196897
Chicago/Turabian StyleWang, Yanbin, Tian Luan, Deli Gao, and Jinduo Wang. 2022. "Research Progress on Recoil Analysis and Control Technology of Deepwater Drilling Risers" Energies 15, no. 19: 6897. https://doi.org/10.3390/en15196897
APA StyleWang, Y., Luan, T., Gao, D., & Wang, J. (2022). Research Progress on Recoil Analysis and Control Technology of Deepwater Drilling Risers. Energies, 15(19), 6897. https://doi.org/10.3390/en15196897